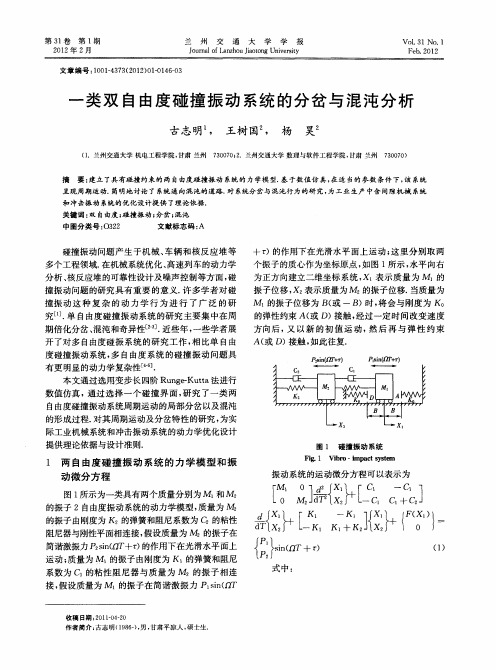
一类单自由度碰撞振动系统的混沌与最优碰撞
一类三自由度碰撞振动系统的分岔与混沌演化

等耐
。
0 ) 点时, 系统 可 能发生 鞍 阶分 岔 。 ( 7 ) 征 值横 截 (1,
在适 当 的参数 下 , 图1 所 示 的碰撞 能 够表 现为 周
期 碰 撞过 程 。周期 q = 1 / n运动 表示 振子 碰撞 后 时 间 t = 0 , 下 一次 碰撞 的 时 间恰 好 为 2 n 丌 / ( 1 ) ( n=1 , 2 …) ,
=
∑ ( e -  ̄ j t (  ̄ c o s ( 【 , t + b i s i n ∞ ) +
s i n( t o t + r )+ c o s( ( o +7 I ) ) ( 2 ) ( 3 )
X i ( ) =∑ [ e - ( a j e o s d J +b j s i n ∞ ) + A s i n
J= 1
( t o t+ r 0+△ 丁 )+B C O S( t o t+丁 o+△ ) ]
( 8 )
3
3=e 一 ( a 3 c o s D d 3 t +b 3 s i n 6 d 3 t )+ A 3 s i n( t o t + 『 )+B 3 C O 8( m t +丁 ) 丁 o+△ 丁 )+B 3 C O S( m t +丁 o+△ 7 - )
=
即连 续两 次碰 撞 的 时 间间 隔 皆为 2 n  ̄ r / w。系 统 周 期 运动 的初 始终 止条 件为 :
1
1 . 0 , = 0 . 0 1 , R= 0 . 8 , = 0 . 1 。特征值 如图 2所示 。
( 0 ) = 1 ( 2 n  ̄ r / w) = 1 o ; 1 ( 0 )一 3 ( 0 ) : ;
式中 : “・ ” 表 不 对无量 纲 时 I 司t 求 导 数 。 尢 量 量 如
两自由度单边刚性约束碰撞系统的混沌演化
(co lfm ca i l n l tcl nier g L ahuJ o n nvrt, azo a s 7 0 7 ,C i ) Sho o ehnc de c i gne n , a zo i t gu i sy LnhuG nu 30 0 hn aa e ra e i ao ei a
合特 征 的碰撞 振动 系统参 数 比较多 , 由于耦合 的存 且 在, 系统 周期 运动 会 发 生复 杂 动 力 学行 为 , 而 产生 从 分 岔混 沌现 象 , 因此对 此类 系统 的动力 学行为 进行更
全 面 的了解 和研究 具 有重要 的理论 和 实际意 义 。 C u da dF u … 研 究 了单 自由 度 弹簧 振 .B d n .D x 子在 简谐 力作用 下 的碰撞振 动模 型 , 明 了当碰撞恢 证 复系数 小 于 1 , 时 振子 的周 期运动 不存 在 H p 分 岔 。 of
1 引 言
采 用 的模 型为两 自由度 的碰 撞振 动系统 , 这类模
2 力 学模 型 及 周 期 运 动
图 1 两 自由度 单边 刚性 约束 系统 的力学 模 型 , 为
型的应用非常广泛 , 如振动筛等 。两 自由度碰撞振动 系统 中 的两个振 子 因耦 合 而求 解 比较 困难 。具 有 耦
Ab t a t id o c a i a d l ft o d ge - f fe d m mp c y tm i n ltrlr i o sr i t i o sd r d sr c :A k n fme h n c lmo e - e r e o- re o i a t s o w s e w t u i e a i d c n t n s sc n i e e h a g a i h s p p r h o g o i ain o e r t a n lss a d n me c lsmu ai n n lt a ou in a d P i e r p n t i a e .T r u h a c mbn t ft o ei la ay i n u r a i l t ,a ay i l s l t n on a6 ma — o h c i o c o p n ft e p r d cmoin o e s se ae d d c d,t esa i t fp r d cmoin, h h n me o i r ai n a d c a i g o e i i t t y tm r e u e h o o f h h t bl y o e o i t i i o t e p e o n n o bf c t n h - f u o O n t e p o rp r me es o e s se a e a a y e . tp o ie e r a i f rp a t a y a c y tm p i z t n S i h r p aa tr f h y tm r lz d I r vd sa t oy b ss o r ci l d n miss s e t n h c e ot miai . o Ke r s i r - mp c ;P ie r y wo d :vb o i a t o n a  ̄ma p;bf r ai n h o i c t ;c a s u o
两自由度碰撞振动系统的混沌运动及控制
现研究一类两 自由度振动系统 通 向混沌的道路 , 并用正弦外加驱动力控制混沌 , 数值仿真结果表 明, 该方法 能有效 的将 系统 的混 沌行 为控制 到稳 定 的周期 轨道 。
1 两 自由度碰 撞 振由度振 动 系 统 与 固定 约 束 发 生 碰 撞 的力 学模 型 。质量 为 , 和 : 的质块分 别 由刚度 为 和 的线 性 弹簧和 阻尼 系数 为 c 和 c , 的线 性 阻尼 器 连 接 于支 承 , 质块 只作 水 平方 向 的运 动 , 分 别 受 到 简谐 两个 并 激振 力 Ps ( n i +丁 ( ) i: 12 ,)的作 用 。 当质块 位移
图 1 两 自由度 碰 撞 振 动 系统 的力 学 模 型
等于 间 隙 曰时 , 质块 将 与刚性 约束 A碰撞 , 变速度 方 向后 , 以新 的初值 运动 , 改 又 然后再 次 与约束 A 碰撞 , 如此往 复 。 设力 学模 型 中的 阻尼是 R yeg 假 alih型 比例 阻尼 , 碰撞 过程 由碰撞 恢 复 系数 确 定 , 碰撞
一
{fi f: ( 0 …丁 1) 2S -n
( 1=b )
3
() 4
在 方程 ( ) ( ) , ” 示 对 无 量 纲 时 间 t 导数 , 中 无 量 纲 量 3 和 4 中 “・ 表 求 其
=M2M I / ; =K / I x :K ; 。= x
c/ l o=P/P +P) =  ̄ / 1t 2c 2( l 2 ; / ; =T、 l ; =C/ /l ; l // / 1 K l l 2 ̄ 6=B l( l P ) = K/ P + 2;
2 混 沌碰 撞 运 动
选取 图 1 所示 系统 的一组参 数 , =20 ^=4 0 =00 。=00 B =12 R =0 7 以激励 频 ., ., . ., ., ., 率t O为控制参 数 , 当控制参 数 ∈[.6 ,.9 3 时 , 自由度碰 撞 系统 具有 稳定 的周期 一运 动 , 06 1 0 626 ] 双 5 在 Picr 截 面上表示 的不 动点 为 (119 ~1690 ,.1 ,.8 2,.3 3 给不 动点 一些扰 动作 o a ̄ n .9 , .3 203620069 1420 ), 为初始迭 代点 , 系统仍 能 回到原不 动点 。随着激 振频 率 的增 大 , 系统 发生 H p 分 岔 , 成概 周 期运 动 , of 形 当
一类双自由度含间隙振动系统的混沌碰撞运动及控制
—
一 —1 — 一 P1 - z P + Pz l — — ’ q P
, 一 —
L) ( J 3
用 — q表示 图 1 p— 系统 的周期 运动 , 示力 表 周期 数 , q分别 表 示质块 M p和 与左右 约束 C和 A 的碰撞 次数 . 0 o , 取 一 a 选择 P icr截 面 一 { , t ona6 (l 5 , ,2 )∈ ×S, - 主 , z 一 , 3+ , 造含 问 2 一 - }构 - l 隙振 动系统 的 P icr 映射 ona6
驱动力法控制该系统的混沌冲击振动. 数值仿真结
果表明, 该方法可将系统的混沌碰撞振动控制到稳
定 的周期碰撞 振动.
[ 卜 [
f 。 +,II r < l , 2 ) ,b
质块Ml 的冲击方程为
斛 = 一
1-_ 段 + 1 ]
i )
() 2
1 双 自由度含间隙振动系统 的力学模型
摘
要: 数值模拟 了一类两 自由度碰撞 振动 系统 的概周期碰 撞振 动和混沌碰撞 振动 , 过调 节正 弦外加 驱动 力法 通
控制该 系统的混沌冲击振动. 在适 当的 系统参数 条件 下该类 系统呈现概周期碰撞 振动 , 参数的 变化 导致概周期碰 撞振动通过锁相或磕碰转迁为混沌碰撞振动. 仿真结果表 明通过调节正弦外加 驱动力可将 系统的概周期碰撞振动
V0. 6No 6 12 . De. O 7 c2o
文 章 编 号 :0 14 7 (0 70 —160 10 —3 32 0 ) 60 3 —4
一
类双 自由度 含 间 隙振 动 系统 的 混沌碰 撞 运动 及控制
马 莉
( 兰州交通 大学 数理与软件工程学院 , 甘肃 兰州 707) 3 0 0
一类单自由度非光滑系统混沌运动的延迟反馈控制
( 8)
将式 ( 8 )代入方程 ( 4 )整理得 :
・ ・
x +
B 1 ( a) ・ A1 ( a ) 2 x + 1x = o (ε ) ω a a B 1 ( a)
( 9)
记 Ce ( a ) =
ω 2a
=
R1 ε ω τ) ω τ R2 ( 1 - cos sin ω 2 R1
ω=
・ ・ ・
・
・
第 1 期 张庆爽等 : 一类单自由度非光滑系统混沌运动的延迟反馈控制
157
力系统的动态响应 , 并研究系统的全局分岔问题 。用 符号 q = p / n 表示非光滑系统的周期运动 , n 表示力周 期数 , p表示碰撞次数 。
( a)
( b)
图 5 R 1 = 012 R 2 = 114 时对混沌控制效果图和相图
・
( 1) ( 2)
x + 2Ce ( a ) x + Ke ( a ) x = o (ε )
2
( 10 )
振子 M 的冲击方程为 :
x + = - R x - ( x = b)
・
式 ( 2 ) x - 和 x + 分别表示振子 M 与刚性约束 A 碰撞前 后的瞬时速度 。 213 等效线性化法 在系统运动微分方程 ( 1 ) 中加入延迟反馈控制项
图 1 控制混沌原理图
2 力学模型 、 系统运动微分方程及等效线性
化法
选择图 2 所示的单自由度非光滑系统为研究对
156
振 动 与 冲 击 2008 年第 27 卷
象 ,该模型可以作为一些机械系统机构的抽象 , 具有一 定的典型性 。
是小正数 。 这里用等效线性化法 , 对式 ( 4 ) 求解 。作为第一近 似 , 设方程的解为 : φ ( 5) x = a cos
结构动力学习题答案

结构动力学习题答案在结构动力学中,习题答案通常涉及对结构在动态载荷下的行为进行分析和计算。
这些习题可能包括自由振动分析、受迫振动分析、随机振动分析、模态分析、响应谱分析等。
以下是一些典型的结构动力学习题答案示例。
习题一:单自由度系统的自由振动问题:一个单自由度系统具有质量m=2kg,阻尼系数c=0.5N·s/m,弹簧刚度k=800N/m。
初始条件为位移x(0)=0.1m,速度v(0)=0。
求该系统自由振动的位移时间历程。
答案:首先,确定系统的自然频率ωn:\[ \omega_n = \sqrt{\frac{k}{m}} = \sqrt{\frac{800}{2}}\text{ rad/s} \]然后,计算阻尼比ζ:\[ \zeta = \frac{c}{2\sqrt{mk}} = \frac{0.5}{2\sqrt{2 \cdot 800}} \]由于ζ < 1,系统将进行衰减振动。
可以使用以下公式计算位移时间历程:\[ x(t) = A e^{-\zeta \omega_n t} \cos(\omega_d t + \phi) \] 其中,\( \omega_d = \sqrt{\omega_n^2 - \zeta^2 \omega_n^2} \) 是阻尼频率,A是振幅,\( \phi \)是相位角。
初始条件给出x(0)=0.1m,v(0)=0,可以解出A和\( \phi \)。
最终位移时间历程的表达式为:\[ x(t) = 0.1 e^{-\zeta \omega_n t} \cos(\omega_d t) \]习题二:单自由度系统的受迫振动问题:考虑上述单自由度系统,现在施加一个简谐力F(t)=F_0sin(ωt),其中F_0=100N,ω=10 ra d/s。
求系统的稳态响应。
答案:稳态响应可以通过傅里叶级数或直接应用受迫振动的公式来求解。
对于简谐力,系统的稳态响应为:\[ x_{ss}(t) = \frac{F_0}{k - m\omega^2} \sin(\omega t + \phi) \]其中,\( \phi \) 是相位差,可以通过以下公式计算:\[ \phi = \arctan\left(\frac{2\zeta\omega}{\omega_n^2 -\omega^2}\right) \]习题三:多自由度系统的模态分析问题:考虑一个二自由度系统,其质量矩阵M和刚度矩阵K如下:\[ M = \begin{bmatrix} m_1 & 0 \\ 0 & m_2 \end{bmatrix},\quad K = \begin{bmatrix} k_1 & -k_c \\ -k_c & k_2\end{bmatrix} \]其中,\( m_1 = 2kg \),\( m_2 = 1kg \),\( k_1 = 800N/m \),\( k_2 = 1600N/m \),\( k_c = 200N/m \)。
大学考试—结构力学——试题库及答案
将三刚片组成无多余约束的几何不变体系,必要的约束数目是几个A.4B.5C.6D.3回答错误!正确答案: C支座移动对静定结构会产生A.支座反力B.变形C.内力D.位移回答错误!正确答案: D在互等定理中δ21=δ12,A.δ12B.δ31C.δ22D.δ11回答错误!正确答案: A外伸梁上K截面内力影响线在K截面以里是A.可正可负B.全为正C.全为负D.回答错误!正确答案: D对结构进行刚度计算的目的,是为了保证结构A.不发生刚体运动B.既经济又安全C.美观实用D.不致发生过大的变形以至于影响正常的使用回答错误!正确答案: D外伸梁支座反力影响线形状特征是A.抛物线B.一条直线C.两条平行线两条直线组成的折线回答错误!正确答案: B板的厚度A.远远小于它的长和宽B.等于它的长和宽C.与它的长和宽是同一量级的D.远远大于它的长和宽回答错误!正确答案: A桁架计算的截面法所选分离体包含几个结点A.两个或两个以上B.单个C.无穷多个D.只能有两个回答错误!正确答案: A在力法典型方程中,恒大于零的是A.自由项B.付系数C.主系数D.右端项回答错误!正确答案: C在超静定结构中,若增大某局部的刚度EA,则其余部分的内力将A.减小B.不变可能增大也可能减小D.增大回答错误!正确答案: A当简谐荷载作用于有阻尼的单自由度体系质点上时,若荷载频率远远大于体系的自振频率时,则此时与动荷载相平衡的主要是A.阻尼力B.弹性恢复力C.惯性力D.重力回答错误!正确答案: C如果体系的阻尼增大,下列论述错误的是A.位移和简谐荷载的相位差变大动力系数的绝对值减小C.自由振动的振幅衰减速度加快D.自振周期减小回答错误!正确答案: D单跨超静定斜梁在竖向荷载作用下的弯矩=A.相应的超静定竖向梁的弯矩B.相应的静定水平梁的弯矩C.相应的超静定水平梁的弯矩D.相应的静定梁的弯矩回答错误!正确答案: C支座移动对静定结构会产生A.B.内力C.支座反力D.变形回答错误!正确答案: A固定铰支座有几个约束?A.四个B.一个C.三个D.两个回答错误!正确答案: D用铰来连接四个刚片的结点叫什么?单铰结点B.不完全铰结点C.复铰结点D.组合结点回答错误!正确答案: C去掉一个定向支座,相当于去掉几个约束?A.2B.3C.4D.1回答错误!正确答案: A梁在荷载作用下的位移主要是由什么变形产生的?A.剪切变形B.弯曲变形C.轴向变形D.扭转变形回答错误!正确答案: B三刚片组成无多余约束的几何不变体系,其联结方式是A.以三对平行链杆相联B.以不在一条线上三个铰相联C.以任意的三个铰相联D.以三个无穷远处的虚铰相联回答错误!正确答案: B在梁的弯矩图发生突变处作用有什么外力?A.无外力B.集中力偶C.横向集中力D.轴向外力回答错误!正确答案: BA端固定B端铰支的等截面超静定梁,已知固定端的转角为θA,下列结论错误的是A.MA=3iθAB.QBA=0C.MB=0D.QAB=-3iθA/l回答错误!正确答案: B与力法方程中的系数δki互等的系数是A.δikB.ΔkiC.δiiD.δkk回答错误!正确答案: A单自由度体系在简谐荷载作用下,下列哪种情况内力与位移的动力系数相同?A.荷载作用在质点上与质点运动方向垂直B.荷载不作用在质点上C.均布荷载作用D.惯性力与荷载共线回答错误!正确答案: D简支梁C截面弯矩影响线中K点的竖标表示P=1作用在A.C点时产生的K截面的弯矩B.K点时产生的C截面的弯矩C.K点时产生的K截面的弯矩D.C点时产生的C截面的弯矩回答错误!正确答案: B带有静定部分的超静定梁,超静定部分的内力影响线的特点是A.在静定部分上是曲线,在超静定部分上是直线B.在静定部分上是直线,在超静定部分上是曲线C.在整个结构上都是直线D.在整个结构上都是曲线回答错误!正确答案: B两刚片用一个单铰和过该铰的一根链杆相连组成A.瞬变体系B.有两个多余约束的几何不变体系C.有一个自由度和一个多余约束的可变体系D.无多余约束的几何不变体系回答错误!正确答案: A具有集中质量的体系,其动力计算自由度A.小于其集中质量数B.大于其集中质量数C.等于其集中质量数D.以上都有可能回答错误!正确答案: D超静定结构支座移动时,如果刚度增大一倍则A.内力和位移都不变B.内力缩小一倍、位移也缩小一倍C.内力也缩小一倍、而位移不变D.内力也增大一倍、而位移不变回答错误!正确答案: D三铰拱的水平推力与下列那个因素无关?A.跨度B.拱轴线形状矢高D.荷载回答错误!正确答案: B固定端支座有几个约束反力分量?A.一个B.三个C.两个D.四个回答错误!正确答案: B应用虚功原理时,其中位移状态应当满足什么条件?A.约束和连续B.C.约束D.平衡回答错误!正确答案: A温度变化对静定结构会产生A.弯矩B.剪力C.位移和变形D.轴力回答错误!正确答案: C带有静定部分的超静定梁,静定部分的反力影响线的特点是A.在整个结构上都是直线在整个结构上都是曲线C.在静定部分上是直线,在超静定部分上是零线D.在静定部分上是零线,在超静定部分上是直线回答错误!正确答案: C当远端为滑动支座时,传递系数等于A.1B.C.-1D.0.5回答错误!正确答案: C固定铰支座有几个约束反力分量?A.B.四个C.一个D.两个回答错误!正确答案: D去掉一个固定端支座,相当于去掉几个约束?A.3B.4C.5D.2回答错误!正确答案: A杆系结构中的构件的长度等于截面的高和宽B.远远大于截面的高和宽C.与截面的高和宽是同一量级D.远远小于截面的高和宽回答错误!正确答案: B如果位移法基本体系的附加约束中的反力(矩)等于零,则A.基本体系就与原结构受力一致,但变形不一致。
《结构力学》第09章在线测试
结构力学》第09章在线测试《结构力学》第09章在线测试 剩余时间: 60:55答题须知:1、本卷满分20分。
2、答完题后,请一定要单击下面的“交卷”按钮交卷,否则无法记录本试卷的成绩。
3、在交卷之前,不要刷新本网页,否则你的答题结果将会被清空。
第一题、单项选择题(每题1分,5道题共5分)1、无阻尼单自由度体系在简谐荷载作用下,共振时与动荷载相平衡的是A 、弹性恢复力B 、惯性力C 、惯性力与弹性力的合力D 、没有力2、有阻尼单自由度体系在简谐荷载作用下,共振时与动荷载相平衡的是A 、弹性恢复力B 、惯性力与弹性力的合力C 、惯性力D 、阻尼力3、当简谐荷载作用于无阻尼的单自由度体系质点上时,若荷载频率远远小于体系的自振频率时,则此时与动荷载相平衡的主要是A 、弹性恢复力B 、阻尼力C 、惯性力D 、重力4、一单自由度振动体系,由初始位移0.685cm ,初始速度为零产生自由振动,振动一个周期后最大位移为0.50cm ,体系的阻尼比为A 、0.05B 、ξ=0.10C 、0.20D 、ξ=0.155、在低阻尼体系中不能忽略阻尼对什么的影响?A 、频率B 、主振型C 、自由振动的振幅D 、周期第二题、多项选择题(每题2分,5道题共10分)1、带弹簧支座的梁,EI 为梁的刚度,k 是弹簧的刚度系数,如要增大梁的自振频率ω,可采取下列那些措施?A 、减小质量B 、增大EIC 、增大kD 、增大荷载值E 、将质量移近支座2、多自由度体系的自由振动主要计算A 、频率B 、周期C 、振型D 、动力内力E、动力位移3、一单自由度振动体系,共振时的动力系数和阻尼比可能的是A、ξ=0.05,β=10B、ξ=0.1,β=15C、ξ=0.15,β=20D、ξ=0.2,β=25E、ξ=0.04,β=12.54、引起自由振动的原因是A、初位移B、初速度C、瞬时冲量D、简谐荷载E、突加荷载5、结构的自振频率与什么有关?A、质量B 、刚度C 、荷载D 、荷载频率E 、支座移动第三题、判断题(每题1分,5道题共5分)1、在自由振动过程中无外荷载作用。
一类双自由度碰撞振动系统的分岔与混沌分析
GU h- n W ANG h — u 。 YANG o Z i mig , S ug o , Ha 3
-
kK 1 ’
为了更详尽地描述系统的倍化分岔行为以及通 向混沌的过程 , 在上述系统参数下对模型进行相图
响应分析 .
K
一
C,
_ l ’ ,— u c
L1 / f 』 2
’
图 3 为激振频率c一2 4 时质量为M1 a u .5 的振子
的相 图 , 中横坐标 表 示振子 在水平 方 向 的位 移 量 , 图 纵 坐标表 示 振子在 水平 方 向的速 度 , 时质量 为 M 这
究[. 自由度碰撞振动系统 的研究 主要集中在周 1单 ] 期 倍 化分岔 、 混沌 和奇 异性 [ ]近些 年 , 2. 。 一些 学者 展
开 了对多 自由度 碰 振 系统 的研 究 工作 , 比单 自由 相 度碰 撞振 动 系统 , 自由度 系统 的碰 撞 振 动 问题 具 多 有更 明显 的动力 学 复杂性 L6 4J .. 本文通 过选 用变 步长 四阶 Ru g- t 法 进行 n eKut a 数 值 仿真 , 过 选 择 一 个碰 撞 界 面 , 究 了一 类 两 通 研
= = =
丁
√ ,一 c 2 .
2 系统 的倍化分 贫 以及通 向混沌 的倍周 期
道 路
对 于碰撞 振动 系统 的周 期运 动 及 分 岔 的研 究 ,
一
岔, 质量为 M 的振子做周期为 4 的运动 , 相图如图
3 所示 . c 当 一 23 时 , . 5 系统 出现非 周 期 的稳 态 响
wt pc C- N nna nl i R a Wol A — i i at J. ol e A a s : el r p hm s ] i r ys d
结构动力学思考题(20170106)
《结构动力学》思考题第1~2章1、对于任一振动系统,可划分为由激励、系统和响应三部分部分。
试结合工程实际,分别举例说明何为响应求解、环境识别和系统识别。
2、单自由度系统(SDOF )的响应,如何从物理意义上理解其速度比位移的相位超前 ,加速度比速度的相位超前 。
3、如何从物理意义上理解线性振动系统 解的可叠加性。
4、正确理解等效刚度的概念,进而求解单自由度系统的固有频率。
5、试总结单自由度系统求解固有频率的方法。
6、固有频率f 和圆频率ω的物理意义是什么。
7、正确理解过阻尼、临界阻尼、欠阻尼的概念。
8、正确理解自由振动和强迫振动的概念。
9、一单自由度振动系统的幅-频曲线如图所示,依据频率一般划分为三个区域,试说明各频段内其振动现象的物理含义。
10、一单自由度振动系统,何谓位移共振、速度共振和加速度共振?试说明其物理含义。
11、一单自由度振动系统的位移传递率如图所示,试分析各频率段阻尼比对其响应的影响作用。
12、单自由度振动系统旋转矢量法求解的物理含义是什么。
13、利用旋转矢量法直接求解 控制方程响应的幅值与相位滞后角。
)(t f kx x c x m =++ 2π2πsin()a mx cx kx F t ++=Ω14、对于单自由度(SDOF )振动系统,其运动微分方程为,分析其共振时系统动力学行为与动静平衡力学行为的差异。
15、推导杜哈梅(Duhamel )积分。
16、如何理解频率响应函数的物理意义。
17、阻尼、结构阻尼与等效阻尼的基本概念。
18、结合第一章单自由系统的强迫振动,试总结简谐力激励、周期函数力激励、脉冲力激励、阶跃力激励及任意力激励响应的求解方法。
19、试分析线性振动系统响应谱求解和时间历程响应求解的特点与区别。
20、抗弯刚度为EI 的悬臂杆OA (不计质量)长为l ,与一半径为R 、质量为m 的匀质圆盘在A 点固结,该系统可在xoy 平面内作微幅振动。
①当R =0时,试求该系统振动的固有频率;②当R 不为零时,试求该系统振动的固有频率。
三自由度复杂冲击振动系统的分岔与混沌

作者简介: 张其武 ( 1 9 8 6 一 ) , 男, 甘肃会宁人 , 硕士生 , 主要研究方向为车辆工程 、 非线性 系统 动力学. E - m a i l : z h a n g q w l O 1 1 @1 6 3 . E o m
第3 期
张其 武等 : 三 自由度 复杂冲击振动系统 的分 岔与混沌
稿
]
( 1 )
1 力学模型及 微分方程
图1 表 示一 类具有 3 个 振 子 M1 、 M2 和 M 的三
[ 二 + 一 f i n (  ̄ T +
星 3 +2 以 z 3 + ̄ k 4 X 3一 f 3 o s i n (  ̄ t +r ) ( 2 )
自由度对碰系统 的动力学模型图. 其 中振子 M1 和 M 分别通过刚度系数分别为 K 、 Kz 和 K。 的线性 弹簧 以及阻 尼系 数分 别 为 G 、 C 2和 C 的线 性 阻 尼
K1 ≠0 , C 1 ≠0 , 其中无量纲量为
Ci
:
, 触 , 触 一 一
gi
研究分段光滑机械系统的周期运动稳定性及局 部分岔问题 , 通常的方法是建立系统 的 P o i n c a r 6 映 射. 本文选择截面 A : ={ ( l , 主 1 , x 2 , 主 2 , X 3 , 立 3 ) ∈R 。 ×S , X 3 一 1 = , 立 1 一主 1 + , 主 3 一奎 抖) 作为 P o i n c a r 6 截面, 其中 0 一a t m o d 2 x . 将 表示原点的
研 究, 为工程 实际中含闻隙机械 系统和 冲击振动 系统 的优 化设计提 供 了依据.
关键词 : P o i n c a r 6映射 ; 分岔 ; 混 沌
一类三自由度碰撞振动系统的Poincaré映射的对称性,分岔及混沌

相 同的稳定性 。数值模拟得到 了对称周 期 n 2 动的音叉 分岔 , of 一 运 H p 分岔和 H p-of 岔。此外 , of p分 H 通过 Pi a o cr n 6
截面投影相图的形式研究 了由音叉 分岔通向混沌的路径 。
关 键词 : 碰撞振动系统 ; 对称周期 n一2运动 ;oБайду номын сангаасcr P i a ̄映射 ; n 分岔 ; 混沌
mo in r e r s n e . e ie , e r u e h o f rp th o k b f r ain a e s d e e fr f e p a e t s a e r p e e td B s s t o t st c a sat i fr i c t r t i d i t mso h s o d h o e c u o u nh o h t
Ab tac : s r t A t e — e r e o . e d m vb o i a t y t m wih y hr e d g e — ff e o r i r —mp c s se t s mmerc o sr i i g tps s c nsd r d. T t c n ta n n so i o i e e i he P i a 6 ma ft y tm se t b ihe onc r p o he s se i sa ls d,a d t e s mme r ft e P i c r p i e v d i e al n h y ty o o n a 6 ma sd r e n d ti.Th e r f h i e t o yo h bf r ain o x d p i t sa p i d t u h mo e ,a d i i h wn t a h y i c t ff e on si p le o s c d l n t ss o h tt e s mme r ft e Pon a 6 ma u pr s u o i ty o h i c r p s p e — s s c d me so 一 ro — o b i iu c t n,Ho ffi iu c to n ic fr — i iu c t n o y e o i n i n 1 pe d d u l i ng b f r a i o p - p b f r a i n a d p t ho k f p b f r ai fs mmerc p — l l o ti e
振动理论第二章习题解答
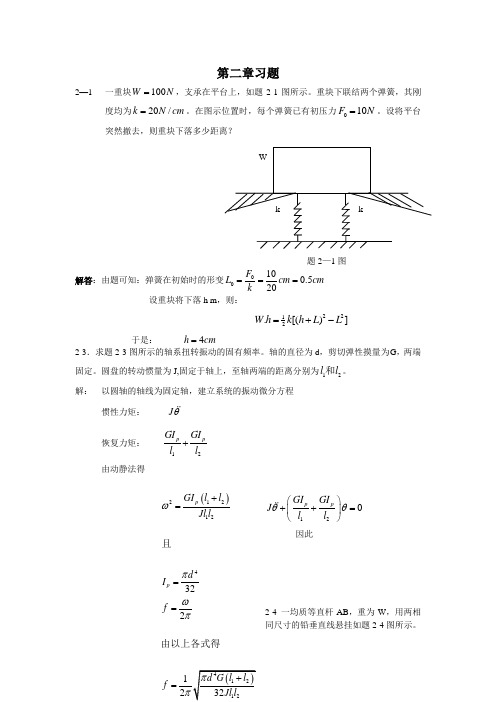
第二章习题2—1一重块100W N =,支承在平台上,如题2-1图所示。
重块下联结两个弹簧,其刚度均为20/k N cm =。
在图示位置时,每个弹簧已有初压力010F N =。
设将平台突然撤去,则重块下落多少距离?题2—1图 解答:由题可知:弹簧在初始时的形变00100.520F L cm cm k === 设重块将下落h m ,则:2212.[()]W h k h L L =+- 于是: 4h cm =2-3.求题2-3图所示的轴系扭转振动的固有频率。
轴的直径为d ,剪切弹性摸量为 G ,两端固定。
圆盘的转动惯量为J,固定于轴上,至轴两端的距离分别为12l l 和。
解: 以圆轴的轴线为固定轴,建立系统的振动微分方程 惯性力矩: J θ恢复力矩: 12p p GI GI l l +由动静法得120p p GI GI J l l θθ⎛⎫++= ⎪⎝⎭因此2-4 一均质等直杆AB ,重为W ,用两相同尺寸的铅垂直线悬挂如题2-4图所示。
()122124322p p GI l l Jl l d I f f ωπωπ+====且由以上各式得线长为l ,两线相距为2a 。
试推导AB 杆绕通过重心的铅垂轴作微摆动的振动微分方程,并求出 其固有频率。
解:AB 杆绕重心摆动,则:()2222cos 200: 212330=: 2J a Wa F T T l lJ Fa Wa J l m m J b b Wa mlb a b f θθθϕθθθθθωωπ===+=+===+=∴==惯性力矩: 恢复力矩: 2Fa 其中 : 则 : 即 : 又有则 : 固有频率2-5 有一简支梁,抗弯刚度EI=2E10 N ·c ㎡,跨度为L=4m ,用题图(a),(b)的两种方式在梁跨中连接一螺旋弹簧和重块。
弹簧刚度K=5kN/cm ,重块质量W=4kN,求两种弹簧的固有频率。
AB(a)(b) 解:根据材料力学理论可知简支梁中点的刚度33()2348l mg mgl EI EI==3148l mgEIk ==(a ) 图可以看作弹簧和杆的并联11348e EI k k k k l=+=+弹簧质量系统的固有频率112f π=已知EI=2E10 N ·c ㎡, K=5kN/cm, W=4kN代入数据得111.14f Hz =(b ) 图可以看作弹簧和杆的串联121*e k k k k k =+ 所以2212e k f mπ=代入数据得2 4.82f Hz =2—9一有黏性阻尼的单自由度系统,在振动时,它的振幅在5个周期之后减少了50%。
第十章 结构动力学(判断填空题)

引起的静位移。
()
9、多自由度体系的自由振动,一般包括所有的振型,所以不可能出现仅按某一个主振型的振动。
()
10、两端固定梁的第一频率比相应简支梁(杆长与截面相同,质量分布也相同)的第
171
一频率高。
(
)11、体系的自振频率与动力荷载的频率有关。
(
)
20、 多自由度体系,刚度系数与柔度系数的关系是:k i j i j =1/δ 。
(
)21、体系质点的初速度越大,则其自由振动频率越高。
(
)22、外界干扰力只影响振幅,不影响自振频率。
(
)
23、只要结构对称(包括质量分布情况),其振型一定是正对称或反对称的。
(
)24、在动力计算中,图a 、b 所示结构的动力自由度相同(各杆均为无重弹性杆)。
()(a)
172
174
变则竖向振动时的自振频率。
175
k为弹簧刚度。
则体系的竖向振2
176。
结构动力学问答题答案 武汉理工 研究生
《结构动力学》思考题第1章1、对于任一振动系统,可划分为由激励、系统和响应三部分组成。
试结合生活或工程分别举例说明:何为响应求解、环境识别和系统识别?响应求解:结构系统和荷载已知,求响应。
又称响应预估问题,是工程正问题的一种,通常在工程中是指结构系统已知,具体指结构的形状构件及离散元件等,环境识别:主要是荷载的识别,结构和响应已知,求荷载。
属于工程反问题的一种。
在工程中,如已知桥梁的结构和响应,根据这些来反推出桥梁所受到的荷载。
系统识别:荷载和响应已知,求结构的参数或数学模型。
又称为参数识别,是工程反问题的一种,在土木工程领域,房屋、桥梁和大坝等工程结构被视为“系统”,而“识别”意味着由振动实验数据求得结构的动力特性(如频率、阻尼比和振型)。
如模态分析和模态试验技术等基本成型并得到广泛应用。
2、如何从物理意义上理解线性振动系统 解的可叠加性。
求补充!!!!!3、正确理解等效刚度的概念,并求解单自由度系统的固有频率。
复杂系统中存在多个弹性元件时,用等效弹性元件来代替原来所有的弹性元件,等效原则是等效元件刚度等于组合元件刚度,则等效元件的刚度称为等效刚度。
4、正确理解固有频率f 和圆频率ω的物理意义。
固有频率f :物体做自由振动时,振动的频率与初始条件无关,而仅与系统的本身的参数有关(如质量、形状、材质等),它是自由振动周期的倒数,表示单位时间内振动的次数。
圆频率ω: ω=2π/T=2πf 。
即为单位时间内位移矢量在复平面内转动的弧度,又叫做角频率。
它只与系统本身的参数m ,k 有关,而与初始条件无关5、正确理解过阻尼、临界阻尼、欠阻尼的概念。
一个系统受初扰动后不再受外界激励,因为受到阻力造成能量损失而位移峰值渐减的振动称为阻尼振动。
系统的状态按照阻尼比ζ来划分。
把ζ=0的情况称为无阻尼,即周期运动;把0<ζ<1的情况称为欠阻尼,即系统所受的阻尼力较小,振幅在逐渐减小,最后才达到平衡位置;把ζ>1的情况称为过阻尼,如果阻尼再增大,系统需要较长的时间才能达到平衡;把ζ=1的情况称为临界阻尼,即阻尼的大小刚好使系统作非"周期"运动。
一类单自由度碰撞振动系统的混沌与最优碰撞

一类单自由度碰撞振动系统的混沌与最优碰撞
韩俊福
【期刊名称】《机械工程与自动化》
【年(卷),期】2013(000)003
【摘要】建立了一类单自由度含双侧刚性约束碰撞振动系统的对称型周期运动方程,基于Poincaré映射方法通过数值仿真,研究了系统周期运动的逆周期倍化分岔及其通向混沌的道路。
通过最优控制理论给出了振动系统的最优碰撞条件,数值仿真结果证明了该方法的有效性,为实际应用中碰撞振动系统的动力学优化设计提供了理论参考。
【总页数】4页(P122-125)
【作者】韩俊福
【作者单位】兰州交通大学机电工程学院,甘肃兰州 730070
【正文语种】中文
【中图分类】TP391.7
【相关文献】
1.一类双自由度碰撞振动系统的分岔与混沌分析 [J], 古志明;王树国;杨昊
2.一类三自由度碰撞振动系统的Poincaré映射的对称性,分岔及混沌 [J], 乐源;谢建华
3.一类三自由度碰撞振动系统的分岔与混沌演化 [J], 黄志东
4.一类两自由度碰撞振动系统的分岔与混沌演化 [J], 潘利平
5.一类三自由度碰撞振动系统的Hopf-pitchfork余维二分岔与混沌 [J], 彭珊;成龙
因版权原因,仅展示原文概要,查看原文内容请购买。
郑州大学远程教育结构力学在线测试1-9章答案分析
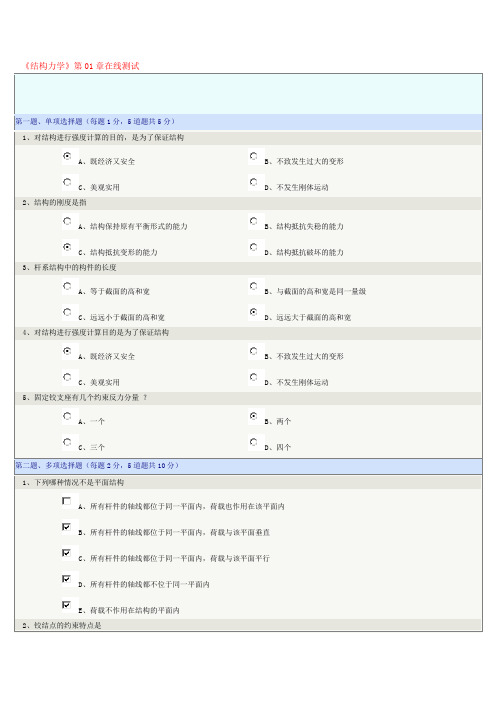
《结构力学》第01章在线测试第一题、单项选择题(每题1分,5道题共5分)1、对结构进行强度计算的目的,是为了保证结构A、既经济又安全B、不致发生过大的变形C、美观实用D、不发生刚体运动2、结构的刚度是指A、结构保持原有平衡形式的能力B、结构抵抗失稳的能力C、结构抵抗变形的能力D、结构抵抗破坏的能力3、杆系结构中的构件的长度A、等于截面的高和宽B、与截面的高和宽是同一量级C、远远小于截面的高和宽D、远远大于截面的高和宽4、对结构进行强度计算目的是为了保证结构A、既经济又安全B、不致发生过大的变形C、美观实用D、不发生刚体运动5、固定铰支座有几个约束反力分量?A、一个B、两个C、三个D、四个第二题、多项选择题(每题2分,5道题共10分)1、下列哪种情况不是平面结构A、所有杆件的轴线都位于同一平面内,荷载也作用在该平面内B、所有杆件的轴线都位于同一平面内,荷载与该平面垂直C、所有杆件的轴线都位于同一平面内,荷载与该平面平行D、所有杆件的轴线都不位于同一平面内E、荷载不作用在结构的平面内2、铰结点的约束特点是A、约束的各杆端不能相对移动B、约束的各杆端可相对转动C、约束的各杆端不能相对转动D、约束的各杆端可沿一个方向相对移动E、约束的各杆端可相对移动3、刚结点的约束特点是A、约束各杆端不能相对移动B、约束各杆端不能相对转动C、约束的各杆端可沿一个方向相对移动D、约束各杆端可相对转动E、约束各杆端可相对移动4、可动铰支座的特点是A、约束杆端不能移动B、允许杆端转动C、只有一个约束力偶D、允许杆端沿一个方向移动E、只有一个反力5、固定端支座的特点是A、不允许杆端移动B、只有一个反力C、允许杆端转动D、不允许杆端转动E、有两个反力和一个反力偶第三题、判断题(每题1分,5道题共5分)1、结构是建筑物和构筑物中承受荷载起骨架作用的部分。
正确错误2、板壳结构的厚度远远小于其它两个尺度。
正确错误3、为了保证结构不致发生过大的变形影响了正常使用,要求结构要有足够的强度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x } m
x / m
∞t / r a d
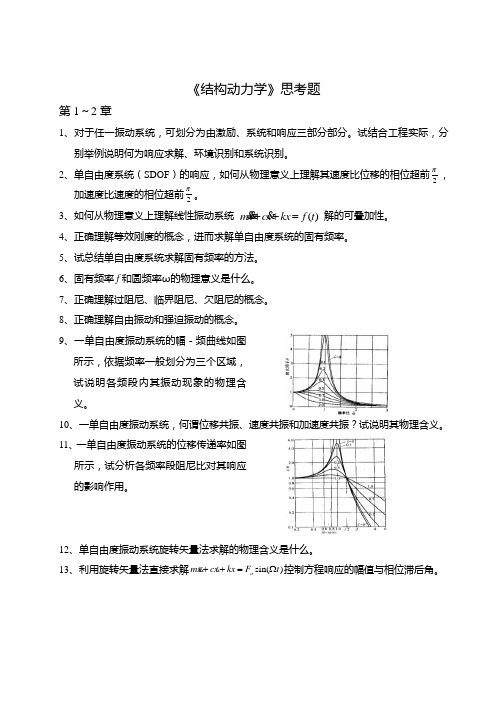
( a)胸 相 图 ( t o = 4 . 2 5 r a d / s )
( b )胂g 相图 ( ∞= 4 . 2 1 r a d / s )
( c ) ̄ P o i n c a r 6 投影图 ( ∞: 4 . 2 1 r a d / s )
3 最优 碰撞
3 . 1 基 本 思 想
=“ ( ) 称 为一个 控 制 。
由于实 际 系统 的控 制 参 数 都 是 有 限 的量 , 不 能 取
无 限大 的 值 , 若将这些值看作点 , 则 它 们 位 于 欧 式 空 间 的有 界 的闭集 称 之 为 控制 域 【 , , 将 定 义 在 时 间 t的
—
z,
/ - g -  ̄ -, 选 择振 子 与刚性 约束 A f  ̄ I gN a - , t N P o i n c a r 6
截面进 行分 布。
2 混 沌 碰 撞 振 动
连接 , 并 受到 简谐激 振力 P ・ s i n ( o t t +r ) 的作 用 , 振 子 只作水 平方 向的运 动 。当振子 的位 移 X 等 于位 移 B(
… … … … … … … … … … … … … … … … … … … …
( 】 0)
・
l 2 4 ・
机 械 工 程 与 自 动 化
2 0 1 3年 第 3期
至此 , 问 题 就 归 结 为 在 周 期 碰 撞 条 件 ( 丁) 一 z ( O ) =6下确 定控制 n ( £ ) 使得 式( 1 0 ) 定义 的泛 函取最
供 了理 论 参 考 。
关 键 词 :混 沌 ; 最优 碰 撞 ;振 动 系 统 ; 单 自 由度 中 图 分 类 号 :TP 3 9 L 7 文 献 标 识 码 :A
0 引 言
此往 复 , 碰撞 过程 由恢复 系数 尺 决定 。
尸・ s i n ( ∞t +1 - )
以新 的初值运 动 , 然后 再 次与约束 A( 或 一A) 碰撞 , 如
收 稿 日期 :2 0 1 2 — 1 2 — 1 0 ;修 回 日期 :2 0 1 3 ~ 0 1 - 2 3
作 者 简介 :韩 俊 福 ( 1 9 8 8 一 ) ,男 ,甘肃 临夏 人 ,在 读 硕 士 研 究 生 ,研 究 方 向 :非 线 性 系统 动 力 学 。
在 任意连 续碰撞 之 间( I Xl <B) , 系统 的运 动微 分
方程 为 :
M X +CX +KX= = = P ・s i n( t o t +r )。
XA +一 — — R X^ 一 。
…… ( 1 )
统, 以最优控 制理论 阐述 在一 些条件 下 的最优 碰撞 ,
图 3 振子的运动相图及 P o i n c a r 6映 射 图
给定 含参 数 a之 函数 ( z, , a ) , f o及 其偏 导数 a f o l a x ( 一1 , 2 , …, ) 在整 个 区间 上有 定 义且 是 连续 的, 此时 寻求 最优控 制 的基本 问题 可表 示 为 : 在相 空 间 内给定 z 。 和z 两个 点 , 如 果 能 寻找 到 控制 “ ( ) 将 所 有 相点从 。移到 z , 并且 能使 泛 函式 ( 3 ) 取最小 值 :
第3 期( 总第 1 7 8期 )
2 0 1 3年 6 月
机 械 工 程 与 自 动 化
ME CH ANI CAL ENGI NEE RI NG & AUT( ) M ATI ( ) N
No .3
J H I 1 .
文章编号 : 1 6 7 2 — 6 4 l 3 ( 2 0 l 3 ) O 3 — 0 1 2 2 — 0 4
r t ,
其中: 5 为积 分微 面积 ; ( £ ) 为 系统在无 碰撞 条件 下 的 Gr e e n函数 ; ( £ ) 为控制 系统 的周期 Gr e e n函数 。
z ( £ ) 一专∑ 矿 ( ) e 。 …………“( 6 )
z ( ) 一毒∑ ( s ) Q ( s ) e 。 ……… ( 7 )
本 文 中, 选 取 无 量 纲 量 b: BK , z
L
一
,
一
图l 是一 类单 自由度含 双侧 刚性 约束碰 撞振 动系 统 的力 学模 型 。质 量为 M 的振 子 由刚 度 系数 为 K/ 2 的线性 弹簧 和线 性 比例 阻 尼 系 数 为 c / z的阻 尼 器 相
J f O
式( 3 ) 中, X( £ ) 是 含控 制 的 系统 方 程 d x / d t 一
厂 ( z, ) 具 有初始 条 件 X( t o ) :. T o的 解 。满足 上 述 问题 的解 “ ( £ ) 称为将 相点从 位置 勘 移动到 z 的最 优控制 。
3 . 2 双侧 约 束 系统的 最优 碰 撞
大值 。
击能力 。
3 . 3 双侧 约束 系统的 最优 间隙
1 1 1 O O O O 0
当碰撞振 动 系统 受 到 固定 的激 励 作 用 时 , 周期 T 为 固定 参数 。此时 , 可 以 通过 调 节 间 隙来 增加 碰 撞 冲 击效果 。对 于单 自由度 碰 撞 振 动 系统 , 可 以解 析地 分
一
类单 自由度 碰 撞振 动 系统 的混沌 与最优 碰 撞
韩 俊 福
( 兰 州 交通 大 学 机 电7 _ - 程 学 院 ,甘 肃 : M - 州 7 3 0 0 7 0 )
摘 要 :建 立 了一 类单 自由度 含 双 侧 刚性 约 束 碰 撞 振 动 系 统 的对 称 型周 期运 动方 程 ,基 于 P o i n c a r 6映 射 方 法 通
2 0 1 3年 第 3 期
韩俊福 : 一 类单 自由度 碰 撞 振 动 系统 的 混 沌 与 最优 碰 撞
・1 2 3・
随着激 振频 率 的增 加 , 系统 出现 逆倍 化分 岔序 列 , 并 产 生了不 希 望 看 到 的混 沌 行 为 , 振 子 的 运 动 相 图 及 P o i n e a r 6 映射 图 如图 3所示 。
∞t / r a d
Dt l r a d
( d )/ d  ̄ J P o i n c a r i f 投 影图 ( t o = 2 . 1 t a d / s )
( e )/ d  ̄ 3 P o i n c a r i f 投影 图 ( = 1 . 5 r a d / s )
周期 碰撞 条件借 助 Gr e e n函数写成 等周 约束 的形
式, 即:
) 一 争 一 0 。…………. ( 1 1 )
将式( 1 1 ) 代入式 ( 1 0 ) 可得 最优极 值 问题 的泛 函 S
的 L a g r a n g形式 为 : .
析最 优间 隙。考虑式 ( 1 O ) , 该 问题 的泛 函表 示为 :
过 数 值 仿 真 ,研 究 了 系统 周 期 运 动 的逆 周 期 倍 化 分 岔及 其通 向混 沌 的 道路 。通 过 最 优 控 制 理 论 给 出了振 动 系
统 的最 优 碰 撞 条 件 ,数 值 仿 真 结 果 证 明 了该 方 法 的有 效 性 ,为 实 际 应用 中碰 撞 振 动 系统 的动 力 学 优 化设 计 提
( “ )= J一一 “ I z ( £ 一s ) ( s ) d s 。 ………
… … … … … … … … … … … … … … … … … … … …
( 1 6 )
S — j J 0 { 一 J u T z ( — s ) “ ( ) 十 厶 上 ( s ) ] + ・
∽ + [
出 。 … ( 8 )
如图 1 所示 , 考 虑 碰撞 振 动 系统 的 碰 撞前 速 度 为
根据 碰 撞 振 动 的周 期 性 条 件 和 Gr e e n函数 的性 质, 可将碰撞 冲量 表示 为 :
X^ + , 系统在 丁周期 控制 u Байду номын сангаас用 下碰 撞 引起 的冲量 可
机械 动力系统 内部 或边界上 的间隙常使 系统 产生 碰撞 振 动, 参 数 的 变 化 将 引 起 系 统 响 应 的 本 质 变 化—— 产生 分岔 现象 和混 沌 运 动n ] , 从 而 使 系统 出现 动态 失稳 , 这 种失稳 若 得 不到 及 时 控制 将 会 极 大 地破 坏 系统 的动 力学 结构 。 因此 , 如 何 优化 系统 内部 结构 已成 为非线 性科 学领域 的研究 热点 。 1 9 8 9年 Hu b l e r发 表 了 第 一 篇 控 制 混 沌 的 文
碰 撞期 间系 统 的响应 由冲 量和控 制输 入决 定 。借
助G r e e n函数 , 系统 的 响应 可 以表示 为 :
rr
( £ )一一 l ( £ ) +I z ( 一 ) u d s。 …… ( 5 )
( ) = 一 j [ “ ( 一 s ) “ ( s ) + 。 ( s ) 3 d s 。
某一 闭 区间E t o , t ] 上, 在控 制 域 内取 值 的每 一个 函数
0 0 0 0 0
—
/ ( r a d・S - I )
图2 c u 的 局 部 分 岔 图
一
—
-
0 O O 0
一
一
一
一
O. 5 0. 4 0 .3 O. 2 0. 1 O 0. 1 O. 2 O. 3 O. 4 0.
给 出碰撞 的最优参 数条 件 , 通过 数值仿 真 , 验证 了该 方
法 的有效性 。 1 单 自由度 含双侧 刚性 约束力 学模型