数字信号处理课后答案
数字信号处理第三版西科大课后答案第6章

λp=1,
s
s p
4
(4) 求阶数N和ε。
N arch k 1
arch s
k 1
100.1as 1 100.1ap 1 1456.65
N arch 1456.65 3.8659 arch 4
为了满足指标要求, 取N=4。
100.1ap 1 0.2171
(3) 求归一化系统函数G(p)
3.2361p 1
或
G( p)
1
( p2 0.618 p 1)( p2 1.618 p 1)( p 1)
当然, 也可以先按教材(6.2.13)式计算出极点:
p ejπ
1 2
2k 1 2N
k
k 0,1, 2,3, 4
再由教材(6.2.12)式写出G(p)表达式为
G( p) 4 1
( p pk )
p1
ch0.5580 sin
π 8
j
ch0.5580 cos
π 8
0.4438
j1.0715
3π
3π
p2 ch0.5580sin 8 j ch0.5580 cos 8 1.0715 j0.4438
p3
ch0.5580 sin
5π 8
j
ch0.5580 cos
5π 8
1.0715
j0.4438
fp=20 kHz, 阻带截止频率fs=10 kHz, fp处最大衰减为3 dB,
阻带最小衰减as=15 dB。 求出该高通滤波器的系统函数Ha(s)。
解: (1) 确定高通滤波器技术指标要求:
p=20 kHz, ap=3 dB fs=10 kHz, as=15 dB
(2) 求相应的归一化低通滤波器技术指标要求: 套用图 5.1.5中高通到低通频率转换公式②, λp=1, λs=Ωp/Ωs, 得到
数字信号处理课后答案

k = n0
∑
n
x[ k ]
(B) T {x[n]} =
∑
x[k ]
(C) T {x[ n]} = 0.5
x[ n ]
(D) T {x[n]} = x[− n]
1-5 有一系统输入为 x[n] ,输出为 y[n] ,满足关系 y[n] = ( x[n] ∗ u[n + 2])u[n] ,则系统是(A) (A)线性的 (B)时不变的 (C)因果的 (D)稳定的 解:
(a) T { x[ n ]} = h[ n] + x[ n ], (c) T {x[ n]} = ∑ x[ n − k ]
δ [n] + aδ [n − n0 ] ,单位阶跃响应 s[n] = u[n] + au[n − n0 ] 。
1-15 线性常系数差分方程为 y[n] − y[n − 1] +
y[n] = 0 , n < 0 , 则 y[3] = 0.5 。 解: y[0] = y[ −1] − 0.25 y[ −2] + x[0] = 1 y[1] = y[0] − 0.25 y[ −1] + x[1] = 1 y[2] = y[1] − 0.25 y[0] + x[2] = 0.75 y[3] = y[2] − 0.25 y[1] + x[3] = 0.5
∞ ∞ k =−∞ n '=−∞
解: (a)
n =−∞
∑ y[n] = ∑ ∑ x[k ]h[n − k ] = ∑ x[k ] ∑ h[n − k ] = ∑ x[k ] ∑ h[n ']
n =−∞ k =−∞ k =−∞ n =−∞
∞
∞
∞
《数字信号处理》第三版课后习题答案

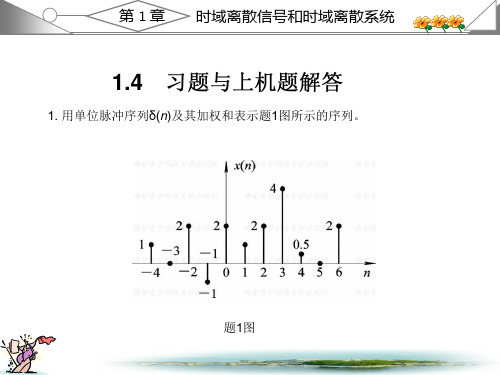
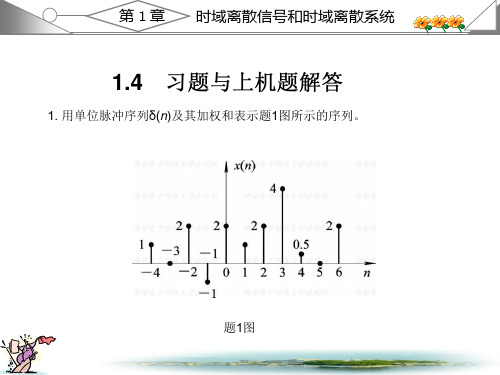
数字信号处理课后答案1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值;(2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。
3. 判断下面的序列是否是周期的,若是周期的,确定其周期。
(1)3()cos()78x n A n ππ=-,A 是常数;(2)1()8()j n x n e π-=。
解:(1)3214,73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w wππ==,这是无理数,因此是非周期序列。
5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
《数字信号处理》第三版课后答案(完整版)

西安电子 ( 高西全丁美玉第三版 ) 数字信号处理课后答案1.2 教材第一章习题解答1. 用单位脉冲序列 (n) 及其加权和表示 题 1 图所示的序列。
解:x( n)(n4) 2 (n 2) ( n 1)2 (n)(n 1) 2 (n 2) 4 ( n 3)0.5(n 4)2 (n 6)2n 5, 4 n 12. 给定信号: x( n)6,0n 40, 其它(1)画出 x( n) 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示 x(n) 序列;(3)令 x 1( n) 2x(n 2) ,试画出 x 1( n) 波形;(4)令 x 2 (n) 2x(n 2) ,试画出 x 2 (n) 波形;(5)令 x 3 (n) 2x(2 n) ,试画出 x 3 (n) 波形。
解:( 1) x(n) 的波形如 题 2 解图(一) 所示。
( 2)x(n)3 ( n 4)(n 3) (n 2) 3 ( n 1) 6 (n) 6 (n 1)6 ( n 2)6(n 3) 6 (n 4)( 3) x 1 (n) 的波形是 x(n) 的波形右移 2 位,在乘以 2,画出图形如 题 2 解图(二) 所示。
( 4) x 2 (n) 的波形是 x(n) 的波形左移 2 位,在乘以 2,画出图形如 题 2 解图(三) 所示。
( 5)画 x 3 (n) 时,先画 x(-n) 的波形,然后再右移2 位, x3 ( n) 波形如 题 2 解图(四) 所示。
3. 判断下面的序列是否是周期的,若是周期的,确定其周期。
(1) x( n)Acos(3n) ,A 是常数;78(2)x(n)j ( 1n)e 8。
解:(1)w 3214T=14 ;7,,这是有理数,因此是周期序列,周期是w3(2)w 1 , 216 ,这是无理数,因此是非周期序列。
8w5. 设系统分别用下面的差分方程描述,x(n) 与 y(n) 分别表示系统输入和输出,判断系统是否是线性非时变的。
数字信号处理(第三版)-课后习题答案全-(原题+答案+图)
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
+4.5δ(n-3)+2δ(n-4)+δ(n-5)
第 1 章 时域离散信号和时域离散系统
8. 设线性时不变系统的单位脉冲响应h(n)和输入x(n)分别有以下三种情况,
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
(5)y(n)=x2(n)
(6)y(n)=x(n2)
(7)y(n)=
n
(8)y(n)=x(n)sin(ωxn(m) )
m0
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
x(m)h(n-m)
m
第 1 章 时域离散信号和时域离散系统
题7图
第 1 章 时域离散信号和时域离散系统
y(n)={-2,-1,-0.5, 2, 1, 4.5, 2, 1; n=-2, -1, 0, 1, 2, 3, 4, 5}
数字信号处理课后答案课件

傅里叶变换的性质
线性性质
若离散信号x(n)和y(n)的 傅里叶变换分别为 X(e^jωn)和Y(e^jωn), 则对于任意实数a和b,有 aX(e^jωn) + bY(e^jωn) 的傅里叶变换等于 aX(e^jωn)和bY(e^jωn) 的傅里叶变换之和。
从而实现信号的分离、抑制或提 取。
滤波器分类
根据不同的特性,滤波器可分为 低通、高通、带通和带阻滤波器,
每种滤波器都有各自的应用场景 和特点。
滤波器原理
滤波器的原理是基于频率响应, 即不同频率的信号经过滤波器后, 其幅度和相位会发生不同的变化。
IIR滤波器设计
IIR滤波器概述
IIR滤波器设计方法
IIR滤波器稳定性
在设计IIR滤波器时,需要考虑其稳定 性。如果系统函数的极点位于单位圆 外,则系统不稳定,可能会导致无穷 大的输出。因此,在设计过程中需要 进行稳定性分析。
FIR滤波器设计
FIR滤波器概述
FIR(Finite Impulse Response)滤 波器是一种具有有限冲击响应的数字 滤波器,其系统函数可以表示为有限 项之和。
插值法
对于非周期性的连续时间信号,可以通过插值法得到离散时间信号。常用的插值方法包括 线性插值、多项式插值、样条插值等。
傅里叶变换法
对于任何连续时间信号,可以通过傅里叶变换将其转换为频域表示形式,然后对频域表示 形式进行采样,得到离散时间信号。再通过逆傅里叶变换将其转换回时域表示形式。
05 第五章 信号的分 析与合成
抽样定理的充分性
对于任何连续时间信号,如果其最高频率分量小于等于fmax,则可 以通过其抽样信号无失真地重建出原信号。
数字信号处理课后习题答案
(修正:此题有错,
(3)系统的单位脉冲响应 而改变,是两个复序列信号之和)
(4)
(修正: 随上小题答案
(修正:此图错误,乘系数应该为 0.5,输出端 y(n)应该在两个延迟器 D 之间)
1-25 线性移不变离散时间系统的差分方程为
(1)求系统函数 ; (2)画出系统的一种模拟框图; (3)求使系统稳定的 A 的取值范围。 解:(1)
(2)
(3)
解:(1)
(2)
(3)
1-7 若采样信号 m(t)的采样频率 fs=1500Hz,下列信号经 m(t)采样后哪些信号不 失真? (1) (2) (3) 解:
(1)
采样不失真
(2)
采样不失真
(3)
,
采样失真
1-8 已知
,采样信号 的采样周期为 。
(1) 的截止模拟角频率 是多少?
(2)将 进行 A/D 采样后, 如何?
(3)最小阻带衰减 5-4
由分式(5.39)根据 A 计算 ,如下: 由表 5.1 根据过度带宽度 计算窗口:
单位脉冲响应如下:
单位脉冲响应如下:
其中 为凯泽窗。 5-5 答:减小窗口的长度 N,则滤波器的过度带增加,但最小阻带衰减保持不变。 5-6:图 5.30 中的滤波器包括了三类理想滤波器,包括了低通,带通和高通,其响应的单位
(1)
,
(2)
1-18 若当 时
;时
(1)
,其中
(2) 证明:
,收敛域
,其中 N 为整数。试证明: ,
(1) 令 其中
,则 ,
(2)
,
1-19 一系统的系统方程及初时条件分别如下: ,
(1)试求零输入响应 ,零状态响应 ,全响应 ; (2)画出系统的模拟框图 解: (1)零输入响应
数字信号处理教程课后习题及答案

x(n
− m)sin
2π 9
+
π 7
即 T [x(n − m)] = y(n − m)
∴系统是移不变的
T [ax1(n) + bx2 (n)]
=
[ax1
(n)
+
bx2
(n
)]sin(
2π 9
+
π 7
)
即有 T [ax1(n)+ bx2 (n)]
= ay1(n) + by2 (n)
∴系统是线性系统
(1) T [ x(n)] = g(n)x(n) (2) (3) T [ x(n)] = x(n − n0 ) (4)
(c)
x (n )
=
e
j
(
n 6
−π )
分析:
序列为 x (n ) = A cos( ω 0n + ψ ) 或 x(n) = A sin( ω 0n +ψ ) 时,不一定是周期序列,
①当 2π / ω 0 = 整数,则周期为 2π / ω 0 ;
7
②当 2π = P ,(有理数 P、Q为互素的整数)则周期 为 Q ; ω0 Q
(3) y(n) = δ (n − 2) * 0.5n R3(n) = 0.5n−2 R3(n − 2) (4) x(n) = 2n u(−n −1) h(n) = 0.5n u(n)
当n ≥ 0 当n ≤ −1
∑ y(n) = −1 0.5n−m 2m = 1 ⋅ 2−n
m = −∞
3
y(n) = ∑n 0.5n−m 2m = 4 ⋅ 2n
∴所给系统在 y(0) = 0 条件下是线性系统。
6.试判断:
数字信号处理课后习题答案

数字信号处理课后习题答案数字信号处理课后习题答案数字信号处理是一门重要的学科,它研究如何对数字信号进行处理和分析。
在学习过程中,我们经常会遇到一些习题,通过解答这些习题可以帮助我们更好地理解和掌握数字信号处理的知识。
本文将为大家提供一些数字信号处理课后习题的答案,希望对大家的学习有所帮助。
一、离散时间信号和系统1. 什么是离散时间信号?答:离散时间信号是在离散时间点上取值的信号,它可以用数学上的序列表示。
2. 什么是离散时间系统?答:离散时间系统是对离散时间信号进行处理的系统,它可以用差分方程或差分方程组来描述。
3. 离散时间信号和连续时间信号有何区别?答:离散时间信号是在离散时间点上取值的信号,而连续时间信号是在连续时间上取值的信号。
二、离散时间信号的表示和运算1. 如何表示离散时间信号?答:离散时间信号可以用数学上的序列表示,例如x(n)表示离散时间信号x在时间点n上的取值。
2. 离散时间信号的运算有哪些?答:离散时间信号的运算包括加法、减法、乘法和卷积等。
3. 什么是离散时间信号的卷积?答:离散时间信号的卷积是指两个离散时间信号之间的一种数学运算,它可以表示两个信号之间的线性叠加关系。
三、离散时间系统的性质和稳定性1. 离散时间系统有哪些常见的性质?答:离散时间系统常见的性质包括线性性、时不变性、因果性和稳定性等。
2. 什么是离散时间系统的稳定性?答:离散时间系统的稳定性是指当输入信号有界时,输出信号也有界。
3. 如何判断离散时间系统的稳定性?答:可以通过判断系统的冲激响应的绝对可和性来判断离散时间系统的稳定性。
四、离散傅里叶变换1. 什么是离散傅里叶变换(DFT)?答:离散傅里叶变换是将离散时间信号转换为离散频率信号的一种数学变换。
2. 离散傅里叶变换有何作用?答:离散傅里叶变换可以将时域的信号转换为频域的信号,从而方便对信号的频谱进行分析。
3. 如何计算离散傅里叶变换?答:可以通过对离散时间信号进行离散傅里叶变换公式的计算来得到离散傅里叶变换的结果。
数字信号处理》课后作业参考答案
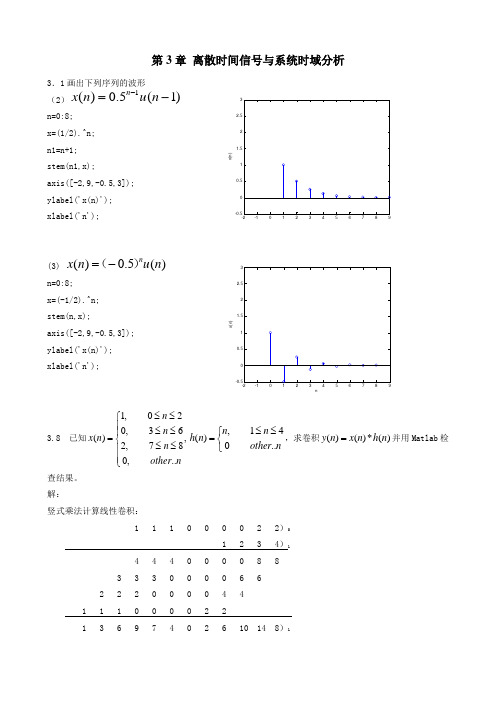
第3章 离散时间信号与系统时域分析3.1画出下列序列的波形(2)1()0.5(1)n x n u n -=- n=0:8; x=(1/2).^n;n1=n+1; stem(n1,x);axis([-2,9,-0.5,3]); ylabel('x(n)'); xlabel('n');(3) ()0.5()nx n u n =-()n=0:8; x=(-1/2).^n;stem(n,x);axis([-2,9,-0.5,3]); ylabel('x(n)'); xlabel('n');3.8 已知1,020,36(),2,780,..n n x n n other n≤≤⎧⎪≤≤⎪=⎨≤≤⎪⎪⎩,14()0..n n h n other n≤≤⎧=⎨⎩,求卷积()()*()y n x n h n =并用Matlab 检查结果。
解:竖式乘法计算线性卷积: 1 1 1 0 0 0 0 2 2)01 2 3 4)14 4 4 0 0 0 0 8 83 3 3 0 0 0 0 6 62 2 2 0 0 0 0 4 41 1 1 0 0 0 02 21 3 6 9 7 4 02 6 10 14 8)1x (n )nx (n )nMatlab 程序:x1=[1 1 1 0 0 0 0 2 2]; n1=0:8; x2=[1 2 3 4]; n2=1:4; n0=n1(1)+n2(1);N=length(n1)+length(n2)-1; n=n0:n0+N-1; x=conv(x1,x2); stem(n,x);ylabel('x(n)=x1(n)*x2(n)');xlabel('n'); 结果:x = 1 3 6 9 7 4 0 2 6 10 14 83.12 (1) 37πx (n )=5sin(n) 解:2214337w πππ==,所以N=14 (2) 326n ππ-x (n )=sin()-sin(n)解:22211213322212,2122612T N w T N w N ππππππ=========,所以(6) 3228n π-x (n )=5sin()-cos(n) 解:22161116313822222()T N w T w x n ππππππ=======,为无理数,所以不是周期序列所以不是周期序列3.20 已知差分方程2()3(1)(2)2()y n y n y n x n --+-=,()4()nx n u n -=,(1)4y -=,(2)10,y -=用Mtalab 编程求系统的完全响应和零状态响应,并画出图形。
数字信号处理课后习题答案

数字信号处理(姚天任江太辉)第三版课后习题答案第二章2.1 判断下列序列是否是周期序列。
若是,请确定它的最小周期。
(1)x(n)=Acos(685ππ+n ) (2)x(n)=)8(π-ne j(3)x(n)=Asin(343ππ+n )解 (1)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),得出=ω85π。
因此5162=ωπ是有理数,所以是周期序列。
最小周期等于N=)5(16516取k k =。
(2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。
因此πωπ162=是无理数,所以不是周期序列。
(3)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π343ππ-n )=Acos(6143-n π),得出=ω43π。
因此382=ωπ是有理数,所以是周期序列。
最小周期等于N=)3(838取k k = 2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。
计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
解 利用线性卷积公式y(n)=∑∞-∞=-k k n h k x )()(按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。
(a) y(0)=x(O)h(0)=1y(l)=x(O)h(1)+x(1)h(O)=3y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1)h(n)=-δ(n)+2δ(n-1)+ δ(n-2)y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)=∑∞-∞=--k kn k n u k u a)()(=∑∞-∞=-k kn a=aa n --+111u(n) 2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λnu(n)*u(n)解:(1) y(n)=∑∞-∞=-k k n u k u )()(=∑∞=-0)()(k k n u k u =(n+1),n ≥0即y(n)=(n+1)u(n) (2) y(n)=∑∞-∞=-k k k n u k u )()(λ=∑∞=-0)()(k kk n u k u λ=λλ--+111n ,n ≥0即y(n)=λλ--+111n u(n)2.4 图P2.4所示的是单位取样响应分别为h 1(n)和h 2(n)的两个线性非移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a nu(n),|a|<1,求系统的输出y(n). 解 ω(n)=x(n)*h 1(n) =∑∞-∞=k k u )([δ(n-k)-δ(n-k-4)]=u(n)-u(n-4)y(n)=ω(n)*h 2(n) =∑∞-∞=k kk u a )([u(n-k)-u(n-k-4)]=∑∞-=3n k ka,n ≥32.5 已知一个线性非移变系统的单位取样响应为h(n)=an-u(-n),0<a<1 用直接计算线性卷积的方法,求系统的单位阶跃响应。
数字信号处理课后习题答案
数字信号处理(姚天任江太辉)第三版课后习题答案第二章2.1 判断下列序列是否是周期序列。
若是,请确定它的最小周期。
(1)x(n)=Acos(685ππ+n ) (2)x(n)=)8(π-ne j(3)x(n)=Asin(343ππ+n )解 (1)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),得出=ω85π。
因此5162=ωπ是有理数,所以是周期序列。
最小周期等于N=)5(16516取k k =。
(2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。
因此πωπ162=是无理数,所以不是周期序列。
(3)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π343ππ-n )=Acos(6143-n π),得出=ω43π。
因此382=ωπ是有理数,所以是周期序列。
最小周期等于N=)3(838取k k =2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。
计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
(a)1111(b)(c)111110 0-1-1-1-1-1-1-1-1222222 3333 3444………nnn nnnx(n)x(n)x(n)h(n)h(n)h(n)21u(n)u(n)u(n)a n ===22解 利用线性卷积公式y(n)=∑∞-∞=-k k n h k x )()(按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。
(a) y(0)=x(O)h(0)=1y(l)=x(O)h(1)+x(1)h(O)=3y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1)h(n)=-δ(n)+2δ(n-1)+ δ(n-2)y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)=∑∞-∞=--k kn k n u k u a)()(=∑∞-∞=-k kn a=aa n --+111u(n)2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λnu(n)*u(n)解:(1) y(n)=∑∞-∞=-k k n u k u )()(=∑∞=-0)()(k k n u k u =(n+1),n ≥0即y(n)=(n+1)u(n) (2) y(n)=∑∞-∞=-k k k n u k u )()(λ=∑∞=-0)()(k kk n u k u λ=λλ--+111n ,n ≥0即y(n)=λλ--+111n u(n)2.4 图P2.4所示的是单位取样响应分别为h 1(n)和h 2(n)的两个线性非移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a n u(n),|a|<1,求系统的输出y(n).解 ω(n)=x(n)*h 1(n) =∑∞-∞=k k u )([δ(n-k)-δ(n-k-4)]=u(n)-u(n-4)y(n)=ω(n)*h 2(n) =∑∞-∞=k kk u a )([u(n-k)-u(n-k-4)]=∑∞-=3n k ka,n ≥32.5 已知一个线性非移变系统的单位取样响应为h(n)=an-u(-n),0<a<1 用直接计算线性卷积的方法,求系统的单位阶跃响应。
数字信号处理西安电子高西全课后答案

因果系统
因果系统是指系统的输出仅与输入的时间点有关,与输入的时间点无关。
信号与系统的关系
01
系统对信号的作用
系统对信号的作用可以改变信号 的幅度、频率和相位等基本属性 。
02
信号在系统中的传 播
信号在系统中传播时,会受到系 统的特性影响,从而改变信号的 基本属性。
03
系统对信号的响应
系统对信号的响应可以反映系统 的特性,从而可以用来分析和设 计系统。
02 离散傅里叶变换的定义
离散傅里叶变换是针对离散时间信号和系统的傅 里叶变换,它将离散时间信号分解成不同频率的 正弦波的叠加。
03 离散傅里叶变换的性质
离散傅里叶变换具有周期性、对称性和Parseval 等重要性质。
快速傅里叶变换算法
1 2 3
快速傅里叶变换算法的定义
快速傅里叶变换是一种高效计算离散傅里叶变换 的算法,它利用了循环卷积和分治的思想来降低 计算的复杂度。
03
数字信号处理技术能够提高通信系统的抗干扰性能、
传输效率和可靠性。
数字信号处理在通信中的应用
调制解调技术
调制是将低频信号转换为适 合传输的高频信号,解调是 将高频信号还原为原始的低
频信号。
通过调制解调技术,可以实 现信号的多路复用和高效传 输。
数字信号处理在通信中的应用
01
信道编码技术
02
信道编码是在发送端对信号进行编码,以增加信号的冗余 度,提高信号的抗干扰能力。
FIR数字滤波器的优 点
FIR数字滤波器具有稳定性好、易 于实现、没有递归运算等优点, 因此在一些需要稳定的系统中得 到广泛应用。
08
信号处理的应用
数字信号处理在通信中的应用
数字信号处理课后答案

(2);
(3)。
解:
(1)
先确定求和域,由和确定对于m的非零区间如下:
根据非零区间,将n分成四种情况求解:
①
②
③
④
最后结果为
y(n)的波形如题8解图(一)所示。
(2)
y(n)的波形如题8解图(二)所示.
(3)
y(n)对于m的非零区间为。
①
②
③
最后写成统一表达式:
11. 设系统由下面差分方程描述:
(1)最小记录时间;
(2)最大取样间隔;
(3)最少采样点数;
(4)在频带宽度不变的情况下,将频率分辨率提高一倍的N值。
解:
(1)已知
(2)
(3)
(4)频带宽度不变就意味着采样间隔T不变,应该使记录时间扩大一倍为0.04s实现频率分辨率提高一倍(F变为原来的1/2)
18. 我们希望利用xx为N=50的FIR滤波器对一xx很长的数据序列进行滤波处理,要求采用重叠保留法通过DFT来实现。所谓重叠保留法,就是对输入序列进行分xx(本题设每xx为M=100个采样点),但相邻两xx必须重叠V个点,然后计算各xx与的L点(本题取L=128)循环卷积,得到输出序列,m表示第mxx计算输出。最后,从中取出B个,使每xx取出的B个采样点连接得到滤波输出。
因此
该式说明是实函数,且是w的偶函数。
总结以上x(n)是实、偶函数时,对应的xx变换是实、偶函数。
(2)x(n)是实、奇函数。
上面已推出,由于x(n)是实序列,具有共轭对称性质,即
由于x(n)是奇函数,上式中是奇函数,那么
因此
这说明是纯虚数,且是w的奇函数。
10. 若序列是实因果序列,其xx变换的实部如下式:
《数字信号处理(第四版)》部分课后习题解答
《数字信号处理(第四版)》部分课后习题解答一、简答题1. 什么是数字信号处理?数字信号处理(DSP)是指对数字信号进行处理和分析的一种技术。
它使用数学和算法处理模拟信号,从而实现信号的采样、量化、编码、存储和重构等过程。
DSP广泛应用于通信、音频处理、图像处理和控制系统中。
2. 数字信号处理的主要特点有哪些?•数字信号处理能够处理和分析具有广泛频谱范围的信号。
•数字信号处理能够实现高精度的信号处理和复杂的算法运算。
•数字信号处理能够实现信号的存储、传输和复原等功能。
•数字信号处理可以利用计算机等处理硬件进行实时处理和系统集成。
3. 数字信号处理的基本原理是什么?数字信号处理的基本原理是将连续时间的模拟信号转换成离散时间的数字信号,然后通过一系列的算法对数字信号进行处理和分析。
该过程主要涉及信号的采样、量化和编码等环节。
4. 什么是离散时间信号?离散时间信号是指信号的取样点在时间上呈现离散的情况。
在离散时间信号中,只能在离散时间点上获取信号的取样值,而无法观测到连续时间上的信号变化。
5. 描述离散时间信号的功率和能量的计算方法。
对于离散时间信号,其功率和能量的计算方法如下:•功率:对于离散时间信号x(n),其功率可以通过求平方和的平均值来计算,即功率P = lim(T->∞) [1/T *∑|x(n)|^2],其中T表示信号x(n)的观测时间。
•能量:对于离散时间信号x(n),其能量可以通过求平方和来计算,即能量E = ∑|x(n)|^2。
二、计算题1. 设有一个离散时间周期序列x(n) = [2, 3, -1, 4, 0, -2],求其周期N。
由于x(n)是一个周期序列,我们可以通过观察序列来确定其周期。
根据观察x(n)的取值,我们可以发现序列在n=1和n=5两个位置上取得了相同的数值。
因此,序列x(n)的周期为N = 5 - 1 = 4。
2. 设有一个信号x(t) = 2sin(3t + π/4),请将其离散化为离散时间信号x(n)。
数字信号处理课后习题答案全章
(1)y(n)=x(n)+2x(n-1)+3x(n-2) (2)y(n)=2x(n)+3 (3)y(n)=x(n-n0) n0 (4)y(n)=x(-n)
团结 信赖 创造 挑战
(5)y(n)=x2(n)
因此系统是非时变系统。
团结 信赖 创造 挑战
(5) y(n)=x2(n)
令输入为
输出为
x(n-n0)
y′(n)=x2(n-n0)
y(n-n0)=x2(n-n0)=y′(n)
故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=[ax1(n)+bx2(n)]2 ≠aT[x1(n)]+bT[x2(n) =ax21(n)+bx22(n)
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3)
h(n)=2δ(n)+δ(n-1)+ δ(n-12)
由于
2
x(n)*δ(n)=x(n)
x(n)*Aδ(n-k)=Ax(n-k)
故
团结 信赖 创造 挑战
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ(n-21 ) 2
=2x(n)+x(n-1)+ x1 (n-2) 将x(n)的表示式代入上式, 得到2
解: (1) y(n)=x(n)*h(n)=
R4(m)R5(n-m)
先确定求和域。 由R4(m)和R5(n-mm)确定y(n)对于m的
间如下:
0≤m≤3
-4≤m≤n
数字信号处理课后习题答案 全全全

1
1 >
. . z
z
(3) , | | 0.5
1 0.5
1
1 <
. . z
z
(4)
, | | 0
1 0.5
1 (0.5 )
1
1 10
>
.
.
.
.
z
z
z
1.8 (1) ) , 0
1
( ) (1 2
1 3 3
3.014 2.91 1.755 0.3195
0.3318 0.9954 0.9954 0.3318
1 0.9658 0.5827 0.1060
z z z
z z z
z z z
z z z
. . .
. . .
. . .
. . .
. + .
=
= . . +
= . . . +
..
.
..
. π
2.13
0,1,2, , 1
( ) ( )
= .
=
k N
Y rk X k
..
2.14
Y(k) = X ((k)) R (k) k = 0,1, ,rN .1 N rN ..
2.15 (1) x(n) a R (n) N
= n y(n) b R (n) N
= n
(2) x(n) =δ (n) y(n) = Nδ (n)
2.16 ( )
1
1 a R N
a N
n
. N
数字信号处理(第三版)_课后习题答案全_(原题+答案+图)
第 1 章
时域离散信号和时域离散系统
题4解图(一)
第 1 章
时域离散信号和时域离散系统
题4解图(二)
第 1 章
时域离散信号和时域离散系统
题4解图(三)
第 1 章
(4) 很容易证明:
时域离散信号和时域离散系统
x(n)=x1(n)=xe(n)+xo(n) 上面等式说明实序列可以分解成偶对称序列和奇对称序列。 偶对称序列可 以用题中(2)的公式计算, 奇对称序列可以用题中(3)的公式计算。 5. 设系统分别用下面的差分方程描述, x(n)与y(n)分别表示系统输入和输 出, 判断系统是否是线性非时变的。 (1)y(n)=x(n)+2x(n-1)+3x(n-2) (2)y(n)=2x(n)+3 (3)y(n)=x(n-n0) (4)y(n)=x(-n) n0为整常数
δ(n-2)]
1 2
=2x(n)+x(n-1)+
x(n-2)
将x(n)的表示式代入上式, 得到
1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(n)+2δ(n-1)+δ(n-2) 2
+4.5δ(n-3)+2δ(n-4)+δ(n-5)
第 1 章
时域离散信号和时域离散系统
8. 设线性时不变系统的单位脉冲响应h(n)和输入x(n)分别有以下三种情况, 分别求出输出y(n)。 (1) h(n)=R4(n), x(n)=R5(n) (2) h(n)=2R4(n), x(n)=δ(n)-δ(n-2) (3) h(n)=0.5nu(n), xn=R5(n)
第 1 章
(5) y(n)=x2(n) 令输入为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(B)T{x[n −1]} = (x[n −1]∗ h[n])u[n] ≠ y[n −1] = (x[n −1]∗ h[n])u[n −1]
∴time − var iant
∑ ∑ (C) rx[n−m][n] = x*[(k − m)]x[(k + n) − m] = x*[k ']x[k '+ n] = rx[n][n]
k =−∞
k '=−∞
∞
∞
∑ ∑ (D) rxx[−n] = x*[k]x[−n + k] = x*[k '+ n]x[k '] = rxx*[n]
填空题(1-11—1-15 题)
1-11 用δ [n] 的移位加权和表示图 T1-3 所示序列 x[n] = −δ[n] + 2δ [n −1] + δ[n − 2]。
x[n]
图 T1-3
1-12 设 y[n] = x[n]∗ h[n] ,则 x[n − 2]∗ h[n − 3] = y[n − 5] (用 y[n] 表示)。
h2
[(
n
−
k
)
−
m
')]h1[m
']
⎞ ⎟⎠
=
x[n]* (h1[n]* h2[n])
1-18 已知 y[n] = x[n]∗ h[n] ,证明
∑ ∑ ∑ ∑ ∑ ∑ ( ) ( ) ( ) (a)
∞ n=−∞
y[n]
=
⎛ ⎜⎝
∞ n=−∞
x[n]
⎞ ⎟⎠
⎛ ⎜⎝
∞ n=−∞
h[n]⎞⎟⎠
∞
(b)
(b)因果,稳定,非线性,时不变
(c)因果,不稳定,线性,时不变;
(d则因果,否则非因果
(f)因果,稳定,非线性,时不变
1-23 已知 LTI 系统的单位脉冲响应如下,指出系统的因果性和稳定性。
(a) h[n] = anu[n +1]
习题详解
第1章
单项选择题(1-1—1-10 题)
∞
∑ 1-1 关于序列 x[n] 的自相关 rxx[n] = x*[k]x[k + n] ,错误的是 k =−∞
(D)
(A) rxx[0] = E , E 是序列的能量; (B) x*[−n] 的自相关等于 x[n] 的自相关;
(C) x[n − m] 的自相关等于 x[n] 的自相关,m 是任意整数; (D) rxx[−n] = rxx[n] 。
(c)非因果,稳定;
(d)非因果,稳定
(e)因果,稳定;
(f)非因果,稳定
[ ] 1-24 证明图 T1-5 中虚线框内的系统是 LTI 系统,其中 h n 是一个 LTI 系统的单位脉冲响应。
(B)T{x[n]} = ∑ x[k] k =n−n0
(D)T{x[n]} = x[−n]
1-5 有一系统输入为 x[n],输出为 y[n],满足关系 y[n] = (x[n]∗u[n + 2])u[n] ,则系统是(A)
(A)线性的 (B)时不变的 (C)因果的 (D)稳定的 解:
1
( A)T{ax1[n] + bx2[n]} = ((ax1[n] + bx2[n]) ∗ h[n])u[n]
k =−∞
n '=−∞
k =−∞
n=−∞
1-19 求图 T1-4 中两个序列的卷积 y [n] 。
x[n]
-2
图 T1-4
解: y[n] = −2δ [n] + 4δ[n −1] − δ[n − 2] − δ[n − 3] − 2δ[n − 4] + 3δ[n − 6] + δ[n − 7]
1-20 设 x[n] = R4[n] ,画出其偶对称分量 xe[n] 和奇对称分量 xo[n] 。
n=−∞
k =−∞
n '= −∞
(b)
∞
∞
∞
∞
∞
∑ (−1)n y[n] = ∑ (−1)n ∑ x[k]h[n − k] = ∑ x[k] ∑ (−1)nh[n − k]
n=−∞
n=−∞
k =−∞
k =−∞
n=−∞
∞
∞
∞
∞
∑ ∑ ∑ ∑ = x[k] (−1)n'+kh[n '] = x[k](−1)k (−1)nh[n]
y[1] = y[0] − 0.25 y[−1] + x[1] = 1 y[2] = y[1] − 0.25 y[0] + x[2] = 0.75 y[3] = y[2] − 0.25 y[1] + x[3] = 0.5
计算、证明与作图题(1-16—1-31 题) 1-16 画出下列序列 (a) x[n] = −δ [n + 2] + 2δ [n] − δ [n − 3] + 4δ [n − 4]
δ [n] + aδ [n − n0 ],单位阶跃响应 s[n]= u[n] + au[n − n0 ] 。
1-15 线性常系数差分方程为 y[n] − y[n −1] + 1 y[n − 2] = x[n] ,设输入是 x[n] = δ[n] ,初始条件是 4
y[n] = 0 , n < 0 , 则 y[3] = 0.5 。 解: y[0] = y[−1] − 0.25 y[−2] + x[0] = 1
n=−∞
−1
n
y[n] =
⎛∞ ⎜⎝ n=−∞
−1
n
⎞⎛ ∞ x[n]⎟⎠ ⎜⎝ n=−∞
−1 n h[n]⎞⎟⎠
∞
∞∞
∞
∞
∞
∞
解:(a) ∑ y[n] = ∑ ∑ x[k]h[n − k] = ∑ x[k] ∑ h[n − k] = ∑ x[k] ∑ h[n ']
n=−∞
n=−∞ k =−∞
k =−∞
y[1] = x[1]h[0] + x[0]h[1] + x[−1]h[2] + x[−2]h[3] = 5.5
1-10 关于 LTI 系统的实现,以下说法错误的是
(C)
(A)FIR 可以采用卷积和实现;
(B)FIR 可以采用有递归的差分方程实现;
(C)IIR 可以采用卷积和实现;
(D)IIR 可以采用有递归的差分方程实现。
(c) x[n] = (−0.5)n u[n] 解:
(b) x[n] = R5[n − 2] + δ [n − 3] (d) x[n] = u[−n + 2]
1-17 证明卷积的交换律、结合律和分配律。
证明:(a) x[n]* h[n] = ∑ x[k]h[n − k] = ∑ x[n − k ']h[k '] = h[n]* x[n]
y[n] = x[n]e jω0nh[0] + x[n −1]e jω0 (n−1)h[1] + ...,∴causal
1-9 设 LTI 系统的单位脉冲响应 h[n] 和输入序列 x[n] 如图 T1-2 所示,则输出样本正确的是
(D)
h[n]
2 1 0.5
x[n]
2 1
012
图 T1-2
-2 -1 0 1 -1
1-8 有一系统,其输入 x[n] 和输出 y[n] 按图 T1-1 所示方框图关联。其中 h[n] 是因果稳定的 LTI
系统的单位脉冲响应。则整个系统不是
(B)
(A)线性的
(B)时不变的
(C)稳定的
(D)因果的
e jω0n
解: y[n] = x[n]e jω0n ∗ h[n]
图 T1-1
T{ax1[n] + bx2[n]} = (ax1[n] + bx2[n]) e jω0n ∗ h[n]
1-13 有限长序列 x[n] 的非零区间是 0 ≤ n ≤ 9 和 30 ≤ n ≤ 39 ,y [n] 的非零区间是10 ≤ n ≤ 19 , 则ω [n] = x[n]∗ y[n] 的非零区间是10 ≤ n ≤ 28 和 40 ≤ n ≤ 58 。 1-14 已知回声系统的输入输出关系 y[n] = x[n] + a ⋅ x[n − n0 ] ,系统的单位脉冲响应 h[n] =
(a)T{x[n]} = h[n] + x[n], h[n]有界
(b)T{x[n]} = x2[n]
0
(c)T{x[n]} = ∑ x[n − k]
(d)T{x[n]} = x[n2 ]
k =∞
(e)T{x[n]} = x[n + n0]
(f) T { x[ n ]} = e|x[ n ]|
解:(a)因果,稳定,非线性,时变;
(B) h[n] = a nu[−n − 1]
(C)
(C) h[n] = cos(0.5n)R10[n] 1-7 关于 LTI 系统,以下说法正确的是
(D) h[n] = u[n + 2] − u[n − 2] (C)
(A)IIR 不能实现;
(B)IIR 是非因果系统;
(C)IIR 不一定稳定;
(D)IIR 不如 FIR 好。
=
⎛ ⎜⎝
k
x[k
]h1[n
−
k
]
⎞ ⎟⎠
*
h2
[n]
∑ ∑ ∑ ∑ =
m
⎛ ⎜⎝
k
x[k
]h1[m