Hiwin最新直线电机力矩电机选型手册技术样本1107版
UniMAT X系列PLC选型手册说明书

UniMAT X系列PLC选型手册深圳市亿维自动化技术有限公司是一家为所有自动化行业提供整体解决方案的“国家级高新技术企业”。
亿维自动化以“致力于成为全球领先、受人尊敬的工业自动化产品与服务提供商”为愿景,公司集研发、生产、销售及服务于一体,产品涵盖、、触控一体机、伺服以及工业物联网系统,并为水质监测和立体停车行业开发出专用控制器,具有所有产品完整的自主知识产权和核心技术,可提供暖通、环保、汽车、冶金、节能等行业的自动化控制系统解决方案,同时为机器人、电子设备、包装机械、物流自动化设备等设备提供配套。
通过不断助力设备制造商转型升级以逐步实现“以科技提高人类劳动生产力”的伟大使命。
亿维自动化自成立以来坚持走自主研发之路,年在武汉成立子公司,专注物联网产品的研发,深圳总公司和武汉分公司研发人员超过公司总人数的公司每年的研发费用超过销售额的。
并与国内著名大学建立合作关系,产学研相结合,持续提升公司技术水平及产品竞争力,立志发展成为"中国智造”的领导者。
亿维自动化已在多个主要工业城市设有办事处,建成通达全国的服务网络,为遍布全国各地的代理商和终端用户提供服务。
同时,国际业务拓展至海外多个国家和地区,在印度、阿尔及利亚、摩洛哥等多个国家有代理商,能够为全球用户提供优质、快捷的服务。
PLC HMI 201735%,10%2030资质荣誉国家级高新技术企业UniMAT 荣获多项国家发明专利UniMAT全系列产品通过CE认证市场影响力研发/设计/生产管理体系均符合:标准ISO90012015亿维简介公司使命以科技提高人类劳动生产力公司愿景成为全球领先、受人尊敬的工业自动化产品与服务提供商诚信、责任、合作、创新价值观品质保证ISO9001:2018质量管理体系TCQ生产与品质管控体系全部产品通过CE认证饺子机颗粒包装机械制面机X 系列PLC 在烧录设备上应用自动托盘上下料机自动卷带上下料机自动管装上下料机IC IC 专用光纤刻字机描述:向核心IC 中烧录专有程序是智能电子产品生产的一个重要环节,以往多是通过手工方式,速度慢耗时长不说,安全性和可靠性都存在风险,随着产能的不断扩大和人工成本的增加,采用自动烧录机势在必行。
迈信驱动华大电机选型手册

LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列LBB 、HBB 系列LB 、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。
UniMAT HMI产品选型手册说明书

UniMAT HMI产品选型手册UH500W系列HMIUH500W系列人机界面是亿维全新推出的物联网型HMI,该系列支持物联网功能,可以进行远程监控设备,为智慧工业提供优质解决方案。
产品优点:①远程上下载。
支持远程上下载设备程序,无需工程师现场调试解决问题。
②报警信息提醒。
故障信息多平台及时推送,综合分析故障点提供预防依据。
③云组态画面。
手机端和网页端可随时随地查看画面运行状态。
④历史数据查询。
历史数据自动上传,数据保存到服务器,方便数据分析。
⑤MQTT数据传输。
物联网屏上传数据到平台使用MQTT的方式,比传统的VPN更省流量。
⑥全网通4G物联网卡。
可自主配置三大运营商流量卡,最优化联网方式。
UH500W系列概述云存储历史数据云端保存远程监控远程监控实时数据远程上下载4G卡云组态SD卡SD远程上下载PLC程序支持全网通网页组态,随时随地查看保存本地化数据深圳市亿维自动化技术有限公司是一家为所有自动化行业提供整体解决方案的“国家高新技术企业”。
亿维自动化以“致力于成为全球领先、受人尊敬的工业自动化产品与服务提供商”为愿景,公司集研发、生产、销售及服务于一体,产品涵盖PLC、HMI、触控一体机、伺服以及工业物联网系统,并为水质监测和立体停车行业开发出专用控制器,具有所有产品完整的自主知识产权和核心技术,可提供暖通、环保、汽车、冶金、节能等行业的自动化控制系统解决方案,同时为机器人、电子设备、包装机械、物流自动化设备等设备提供配套。
通过不断助力设备制造商转型升级以逐步实现“以科技提高人类劳动生产力”的伟大使命。
亿维自动化自成立以来坚持走自主研发之路,在深圳和武汉分别设立了研发中心,研发人员超过公司总人数的35%,公司每年的研发费用超过销售额的10%。
并与国内著名大学建立合作关系,产学研相结合,持续提升公司技术水平及产品竞争力,立志发展成为"中国智造”的领导者。
亿维自动化已在20多个主要工业城市设有办事处,建成通达全国的服务网络,为遍布全国各地的代理商和终端用户提供服务。
Haiwell(海为)PLC选型手册

电机选型手册目录模板
电机选型手册目录模板电机选型手册目录
第一章:引言
1.1 项目背景
1.2 选型的重要性
1.3 本手册的目的
第二章:电机基础知识
2.1 电机的定义
2.2 电机的分类
2.3 电机的工作原理
第三章:选型前的准备工作
3.1 项目需求分析
3.2 重要参数的确定
3.3 工作环境的考虑
第四章:电机选型过程
4.1 设计特性的分析与匹配
4.1.1 转矩-转速特性
4.1.2 功率-转速特性
4.1.3 效率-负载特性
4.2 电机标称参数的确定
4.3 电机效率分析
4.4 选择适当的电机类型
第五章:电机选型实例
5.1 某工业机械设备电机选型实例 5.2 家用电器电机选型实例
5.3 汽车电机选型实例
第六章:电机选型的注意事项
6.1 质量认证与可靠性
6.2 供应商选择与合作
6.3 长期维护与备件支持
6.4 成本与性能综合考虑
第七章:电机选型的评估指标
7.1 功率因数
7.2 效率等级
7.3 起动方式
7.4 轴承选型
第八章:电机选型的未来发展趋势 8.1 新型电机技术
8.2 环保与能效要求
8.3 自动化与智能化
第九章:结论
9.1 选型流程总结
9.2 取得的成果与收获参考文献
附录:常用电机型号推荐。
hiwin直线电机速度限制参数

hiwin直线电机速度限制参数HIWIN是一家知名的直线电机制造商,他们的产品被广泛应用于工业自动化领域。
在直线电机的设计和应用中,速度限制参数是非常重要的指标之一。
直线电机速度限制参数主要包括:最大速度、最小速度、加速度和减速度。
这些参数会直接影响到直线电机的运动控制性能和工作效率。
首先,最大速度是指直线电机在正常工作条件下能够达到的最高线速度。
直线电机的最大速度取决于其设计和制造技术,以及所用材料的质量和强度。
一般来说,直线电机的最大速度会在设计阶段确定,并根据具体应用需求进行调整。
其次,最小速度是指直线电机在运动过程中能够达到的最低线速度。
直线电机的最小速度一般会受到摩擦力和惯性力的影响。
对于高精度的应用或要求较为平滑的运动控制,直线电机的最小速度需要尽可能低,以避免运动过程中产生震动或失控的情况。
加速度和减速度是指直线电机在从静止状态加速到最大速度或从最大速度减速到静止状态时的变化速率。
加速度和减速度的大小直接影响到直线电机的运动平稳性和响应时间。
一般来说,加速度和减速度要合理设置,以避免产生过大的冲击力或运动不稳定的现象。
在实际应用中,直线电机的速度限制参数需要根据具体的应用需求进行调整。
为了确保直线电机的安全性和稳定性,一般会在设计和运行过程中考虑以下几个因素:1.动力系统:包括电源和驱动系统,需要能够提供足够的功率和控制能力,以满足直线电机的速度需求。
2.控制系统:包括运动控制器和编码器等,需要能够准确测量和控制直线电机的位置和速度,以实现精确的运动控制。
3.载荷和惯性:直线电机的速度限制也会受到所加载荷物的影响,载荷和惯性会增加直线电机的负载,可能会使其速度限制下降。
总的来说,直线电机的速度限制参数是设计和应用过程中需要注意的重要指标。
合理设置这些参数可以提高直线电机的运动控制性能和工作效率,满足应用需求。
因此,在选择和应用直线电机时,要充分考虑其速度限制参数,并根据具体应用条件进行调整。
RMV1样本-2023.07版

真空断路器特殊功能底盘车RMV1基本技术参数外形及安装尺寸底盘车接地方式及尺寸梅花触头参数固定式机械联锁断路器内部电路图配置表简介RMV1-5RMV1-15RMV1-16RMV1-19RMV1-20RMV1-21RMV1-25B 02R M V 1Shanghai Renmin Electrical Apparatus Works规格齐全多样化安全可靠注※:当额定电流为1600A 、开断电流为31.5kA 时,相距为210或275可选;当额定电流为1600A 、开断电流为40kA 时,相距为275;当额定电流≤1250A ,开断电流≤31.5kA 时,相距为150或275可选当额定电流为≥4000A 时,需强制风冷当选择操作机构额定操作电压为DC48V时,需定制。
;;操作机构储能电机的技术数据基本技术参数B 02R M V 1B 021外形及安装尺寸固定式630A、1250A,20-31.5kARMV1断路器面板开孔尺寸示意图(单位:mm)固定式630A、1250A、1600A,20-31.5kA注:断路器其余尺寸详见各规格外形尺寸图B 02R M V 1B 021外形及安装尺寸外形及安装尺寸固定式1600A、2000A、2500A、3150A,31.5-40kA;4000A,40kA外形及安装尺寸手车式630A、1250A,20-31.5kA;1600A,31.5kAB2RMV1 B21厂Shanghai Renmin Electrical Apparatus Works(单位:mm)外形及安装尺寸手车式1600A、2000A、2500A、3150A,31.5-40kA;4000A,40kA固封极柱式断路器的外形及安装尺寸固定式630A、1250A,20-31.5kA;1600A,31.5kAB 02R M V 1B 021(单位:mm )(单位:mm)固定式1600A、2000A、2500A、3150A,31.5-40kA;4000A,40kA手车式630A、1250A,20-31.5kA;1600A,31.5kAB 02R M V 1B 021(单位:mm)手车式1600A、2000A、2500A、3150A,31.5-40kA;4000A,40kA630A、1250A,20-25kA;630A、1250A、1600A,31.5kA固封极柱式630A、1250A,20-25kA;630A、1250A、1600A,31.5kAB2RMV1 B21(单位:mm)底盘车的接地方式及安装尺寸接地排安装尺寸图特殊功能底盘车柜门联锁功能接地触头安装尺寸图接地触头(静压式)安装尺寸图接地夹安装尺寸图(单位:mm)(单位:mm)功能简介:1.DPC-□-□/G5,该型号底盘车仅增加关门操作功能,其结构见下图,其原理为当柜门打开时滑块挡在手柄架下面手柄无法插上(自动掉落)。
hiwin直线电机速度限制参数

直线电机速度限制参数直线电机是一种特殊类型的电动机,与传统的旋转电机不同,它通过直线运动来实现工作。
直线电机具有速度快、加速度大、精度高等优点,因此在许多工业和自动化应用中得到广泛应用。
直线电机的速度限制参数是指电机本身在工作过程中所能达到的最大速度。
这个参数一般由电机的设计和性能特点决定,以及所使用的控制系统的限制。
以下是一些影响直线电机速度限制的关键因素:1.电机类型:直线电机有多种类型,如推杆式直线电机、齿轮式直线电机等。
不同类型的电机具有不同的速度限制,这取决于它们的结构和工作原理。
2.电机尺寸:直线电机的尺寸也会影响其速度限制。
通常情况下,尺寸较大的直线电机具有更高的速度限制,因为它们能够提供更大的功率和扭矩。
3.电机功率:直线电机的功率决定了其产生的力和速度。
功率越大,电机所能达到的速度限制也就越高。
4.负载:直线电机所需承载的负载也会影响其速度限制。
较大的负载会增加电机的惯性和摩擦,从而降低速度限制。
5.控制系统:直线电机通常需要搭配相应的控制系统才能正常工作。
控制系统的响应速度和精度会对电机的速度限制产生影响。
高性能的控制系统可以提高直线电机的速度限制。
需要注意的是,在实际应用中,一般要根据具体的需求来选择合适的直线电机速度限制参数。
如果超过了电机的速度限制,可能会导致电机损坏或工作不稳定。
因此,在选择直线电机时,要综合考虑实际工作条件和应用要求。
总结起来,直线电机的速度限制参数受到电机类型、尺寸、功率、负载和控制系统等因素的影响。
通过合理选择和设计这些参数,可以实现满足需求的直线电机速度限制,从而提高工作效率和精度。
维宏 WISE(维智)主轴驱动器及电机 选型手册说明书

WISE Spindle Drive and Motor Selection Guide2st EditionWISE(维智)主轴驱动器及电机选型手册上海维宏电子科技股份有限公司Weihong Electronic Technology Co., Ltd.The copyright of this manual belongs to Weihong Electronic Technology Co., Ltd. (hereinafter referred to as Weihong Company). This manual and any image, table, data or other information contained in this manual may not be reproduced, transferred, or translated without any prior written permission of Weihong Company.The information contained in this manual is constantly being updated. You can login to the official website of Weihong Company to download the latest PDF edition for free.本手册版权属于上海维宏电子科技股份有限公司所有。
未经本公司书面许可,任何人不得对此说明书和其中所包含的任何资料进行复制、拷贝或翻译成其它语言。
因印刷品具有一定滞后性,产品部分更新内容可能无法及时录入,由此给您带来的不便,敬请谅解。
如需了解最新版本的更新内容,可至维宏公司官网进行免费下载。
上海维宏电子科技股份有限公司SHANGHAI WEIHONG ELECTRONIC TECHNOLOGY CO., LTD.前言手册简介本手册主要介绍了维智主轴驱动器,对WSMS、SVM、SE系列电机的型号、规格、尺寸等信息进行说明,为用户在进行电机选型时提供参考。
HIWIN铁芯式平板直线电机LMS资料
26.5
5 x 25 = 125 178
2-M3 x 0.5P x 6DP
LMS23 動子尺寸圖
12-M6 x 1P x 7DP
(500)
22
26.5 5 x 5 = 125 178
36
50
15
2-M3 x 0.5P x 6DP
LMS17 動子尺寸圖
Mf Ms Ws Ls As H
45 55.2
65 55.2
11.5
10 x 25 = 250 273
38 44.2 2-M3x0.5Px6DP
25 60
17.5
25 27.5 80
22
15
2 x 43=86
62.5 120 25 150
44
36
50
M99TC04-1001 26.5
5 x 25 = 125 178
39 42 2-M3 x 0.5P x 6DP 11.5 4.7 30 15
45 57.4
135 57.4
155 57.4
155 57.4
30 15
1.8 4.2 60
2.7 6.2 80
2.7 4.2 60
9.4 13.7 150
10.8 15.9 170
10.8 15.9 170
22-M6x1Px8DP
(500)
4.7
20 20
註:本表數據均為無強制冷卻下之值,除了尺寸規格以外,其餘規格有±10%的誤差範圍
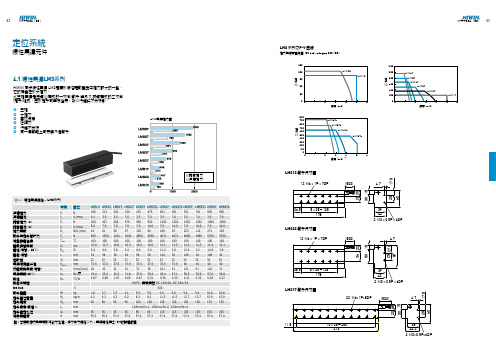
4.1 線性馬達LMS系列
HIWIN 同步線性馬達 LMS是屬於線性驅動產品中推力較大的一型。 它的特色在於大推力。 此三相馬達是由鐵心構成的一次側(動子)與永久磁鐵構成的二次側 (定子)組成。由於定子可無限延長,所以行程將不受限制。 三相 大推力 高加速度 低頓力 行程不受限 同一運動軸上可安裝多個動子
HIWIN Linear 说明书way 线性滑轨 技术手册
提高預壓力,加大選用尺寸或滑塊數以提高剛性
計算使用壽命 依使用速度、頻率計算壽命距離要求
依壽命公式計算選定線性滑軌之壽命距離
潤滑選用 潤滑劑選用,依設備需求可選擇潤滑脂、潤滑油或特殊潤滑劑潤滑
定期注入潤滑脂或自動供油
線性滑軌選用完成
G99TC14-0801
1-3 額定負荷
1-3-1 基本靜額定負荷
(6) 潤滑構造簡單 滑動導引若潤滑不足,將會造成接觸面金屬直接摩擦損耗床台,而滑動導引要潤滑充足並不容易,需要在床 台適當的位置鑽孔供油。線性滑軌則已在滑塊上裝置油嘴,可直接以注油槍打入油脂,亦可換上專用油管接 頭連接供油油管,以自動供油機潤滑。
G99TC14-0801
Linear Guideways
G99TC14-0801
前言
線性滑軌係為一種滾動導引,藉由鋼珠在滑塊與滑軌之間作無限滾動循環,負載平台能沿著滑軌輕易地以高 精度作線性運動。與傳統的滑動導引相較,滾動導引的摩擦係數可降低至原來的1/50,由於起動的摩擦力大 大減少,相對的較少無效運動發生,故能輕易達到µm級進給及定位。再加上滑塊與滑軌間的束制單元設計, 使得線性滑軌可同時承受上下左右等各方向的負荷,上述陳列特點並非傳統滑動導引所能比擬,因此機台若 能配合滾珠螺桿,使用線性滑軌作導引,必能大幅提高設備精度與機械效能。
直线电机的选型方法
直线电机选型要求准则:直线电机:①峰值推力不小于计算峰值推力;②连续推力不小于计算连续推力
1、直线电机的分类
单轴模组、龙门直线模组、XY直线模组、流水线直线电机、标机设备直线模组直线电机系统配套及选型
1、直线电机的选型要求
如何确定系统能达到最大的速度或者加速度?
选型要求准则:
直线电机:①峰值推力不小于计算峰值推力;
②连续推力不小于计算连续推力;
③计入20%裕度,电机推力要大于或等于1.2计算推力;
承载能力:①(有铁芯电机要考虑直线导轨有足够承载电磁吸力的能力);
②精度等级
③品牌选择(HIWIN、CPC、PIM),一般应用场景
(THK、IKO、INA),高精密应用场景
光栅方面:①光栅尺栅距;
②分辨率;
③最大允许速度=分辨率*采样频率;
④厂家选择:雷尼绍、海德汉、Microe;
驱动器方面:峰值电流大于或等于直线电机峰值电流;
连续电流大于或等于直线电机峰值电流;
母线电压Ubus=VMax Ke+IpR
2、直线电机的计算选型
1、系统运动参数的技术要求
行程:总行程、加减速行程、匀速行程;
运动时间:加速时间Ta,匀速时间Tr,减速时间Td,停歇时间Tdw、运动周期T
运动质量:有效负责、平台质量、动子质量;
运动速度:最大速度;。
HIWIN 单轴机器人 技术手册

單軸機器人Single Axis RobotTechnical Information技術手冊Single Axis Robot單軸機器人技術手冊KK 型KS05型KS 型KA 型P. 01P. 21P. 25P. 29(KK 、KS 、KA 的內容規格若有變更,恕不另行通知)K02TC02-08071單軸機器人KK 型1.1 特性〇設計及安裝容易〇體積小重量輕〇高精度〇高剛性〇配備齊全〇最適化設計軌道結構由有限元素分析,得到最好剛性與重量,分析如右圖所述:Taiwan Patent No. 183022China Patent No. 481446USA Patent No. 6584868Germany Patent No. 20117489.8單軸機器人為馬達驅動之移動平台,由滾珠螺桿及U型之線性滑軌導引構成。
其中,滑座同時為滾珠螺桿之驅動螺帽及線性滑軌之導引滑塊。
K02TC02-080721. 2 產品型號E無記號:軌道標準型無6~9頁1, 2無護蓋K02TC02-08073最大速度1. 34K02TC02-08071.4負載規格K02TC02-08075 1. 5 精度等級: mm單位K02TC02-080761. 6 馬達與馬達連接法蘭1.6.1 KK 規格加裝馬達特性〇 高實用行及低價格〇 精度:20~25µm (300mm 以內)〇 重現精度 20~25µm (300mm 以內)〇 最大速度 30~120mm/s 〇 推力 150~600N 〇 使用P 級滾珠螺桿加裝馬達型號編碼K02TC02-08077 1.6.2 使用馬達與馬達連接法蘭K02TC02-0807 81.6.3馬達連接法蘭KK40KK50KK60Motor Adaptor Flange F2 Motor Adaptor Flange F1Motor Adaptor Flange F0 Motor Adaptor Flange F2 Motor Adaptor Flange F0 Motor Adaptor Flange F3 Motor Adaptor Flange F2KK86Motor Adaptor Flange F0Motor Adaptor Flange F0Motor Adaptor Flange F34-M6x1Px12 DP4-M5x0.8Px12 DPKK130Motor Adaptor Flange F0Motor Adaptor Flange F1 Motor Adaptor Flange F3 Motor Adaptor Flange F2 Motor Adaptor Flange F41. 7附件選配1.7.2 極 限1.7.1 軌道極限極限2 : Omron EE-SX6741.8 壽命的計算線性滑軌、滾珠螺桿及軸承為三個主要精密元件,額定壽命的計算公式如下: 1.8.1 線性滑軌表格1表格21.8.2 滾珠螺桿及軸承1.9 潤滑使用潤滑油脂,每運行100公里補充潤滑油脂一次。
科尔摩根DDLMotor直线驱动直接电机手册
科尔摩根公司 Platinum® DDL 系列永磁体总成由 5 个模块化 部分构成:长度分别为 64 毫米、128 毫米、256 毫米、512 毫米和 1024 毫米。每个模块均可按所需的数目增加到任何 长度,以实现无限行程。无论所需行程是 1 毫米(0.04 英寸) 还是 100 米(330 英尺),PLATINUM® DDL 系列永磁体总成均 可满足要求。
标准特性:
无铁芯电机:
• 峰值推力为 60 ~ 1600 N(13.6 ~ 360 lbf); • 持续推力为 21 ~ 450 N(4.6 ~ 101 lbf); • 零齿槽效应; • 零吸力; • 运动平稳,可提供 1 微米 / 秒(0.00004 英寸 / 秒)的
最低速度; • 低质量的线圈总成,可提供高加速度;
定子
N
S
绕组 气隙
滑块
旋转
永磁体
底座
转子电机
直线电机
沿径向剖开并拉直的旋转电机
机没有铁芯或用于缠绕线圈的长槽。因此,无铁芯电机具 有零齿槽效应、非常轻的质量以及在线圈总成与永磁体总 成之间绝对没有吸引力。这些特性非常适合需要极低轴承 摩擦力、轻载荷高加速度,以及能在极小的恒定速度下运 行(甚至是在超低速度下)。模块化永磁体总成由双排永磁 体总成组成,以产生成最大的推力,并形成磁通返回的路径。
对于特别平稳的运动要求,正弦波驱动器(例如,采用数 字霍耳效应的科尔摩根公司 ServoStar® 系列)可为电机提 供正弦波驱动电流,以实现最佳的恒力和恒速性能。
有铁芯电机
无铁芯电机
作 为 一 个 可 选 方 案, 对 于 直线电机应用通常配一个 直 线 编 码 器, 作 为 位 置 反 馈。 现在日益普遍采用的 驱 动 放 大 器(例 如, 科 尔 摩根公司 ServoStar 数字放 大器),直接从直线编码器 中产生所需要的换向信息 (在启动时无论是否有附加 的数字霍耳效应装置)。直 线电机应用中所使用的其 它类型反馈包括直线感应 同步器、激光干涉仪以及 LVDT 位移传感器。
HIWIN台湾滚珠丝杠产品说明书

www.hiwin.tw多軸機器人Multi-Axis Robot取放作業/組裝/整列與包裝/半導體/光電業/汽車工業/食品業• 關節式機器手臂• 並聯式機器手臂• 史卡拉機器手臂• 晶圓機器人• 電動夾爪• 整合型電動夾爪• 旋轉接頭單軸機器人Single-Axis Robot高精密產業/半導體/醫療自動化/FPD 面板搬運• KK, SK • KS, KA • KU, KE, KCTorque Motor 迴轉工作台Torque Motor Rotary Table航太/醫療/汽車工業/工具機/產業機械• RAB 系列• RAS 系列• RCV 系列• RCH 系列滾珠螺桿Ballscrew精密研磨/精密轉造• Super S 系列 (高 Dm-N 值/高速化)• Super T 系列 (低噪音/低振動)• 微小型研磨級• E2 環保潤滑模組• R1 螺帽旋轉式• Cool Type 節能溫控螺桿• RD 高DN 節能重負荷• 滾珠花鍵線性滑軌Linear Guideway精密機械/電子半導體/生技醫療• 滾珠式—HG 重負荷型, EG 低組裝, WE 寬幅型, MG 微小型, CG 扭矩型• 靜音式—QH 重負荷型, QE 低組裝型, QW 寬幅型, QR 滾柱型• 其他—RG 滾柱型, E2自潤型, PG 定位型, SE 金屬端蓋型, RC 強化型特殊軸承Bearing工具機產業/機械手臂• 交叉滾柱軸承 • 滾珠螺桿軸承• 精密線性軸承• 軸承座諧波減速機DATORKER ® Robot Reducer機器人/自動化設備/半導體設備/工具機• WUT-PO 型• WUI-CO 型• WTI-PH 型• WTI-AH 型AC伺服馬達&驅動器AC Servo Motor & Drive半導體設備/包裝機/SMT 機台/食品業機台/LCD 設備• 驅動器—D1, D1-N, D2T/D2T-LM • 伺服馬達—50W~2000W醫療設備Medical Equipment醫療院所/復健中心/療養中心• 下肢肌力訓練機• 沐浴水療系統• 內視鏡扶持機器手臂線性馬達Linear Motor自動化搬運/AOI 光學檢測/精密加工/電子半導體• 鐵心式線性馬達 • 無鐵心式線性馬達 • 棒狀線性馬達 • 平面馬達• 空氣軸承定位平台• X-Y 平台 • 龍門系統力矩馬達&直驅馬達Torque Motor &Direct Drive Motor檢測設備/工具機/機器人• 旋轉平台系列—TMS,TMY,TMN • 水冷式系列—TMRW • 高轉速水冷系列—TMRI工業4.0 最佳夥伴INDUSTRIE 4.0 Best PartnerG99UC01-19061線性滑軌Linear Guideway安裝使用說明目錄1 線性滑軌的安裝 (02)1-1 基準軌與從動軌 (02)1-2 床台受到振動及衝擊力作用,且要求高剛性、高精密度的安裝 (03)1-3 滑軌無側向固定螺釘的安裝 (05)1-4 滑軌無側向定位裝配面的安裝 (07)1-5 線性滑軌安裝注意事項 (07)2 潤滑 (14)2-1 潤滑油脂(Grease) (14)2-2 潤滑油(Oil) (21)3 線性滑軌維護注意事項 (22)G99UC01-19062從動側基準側1.線性滑軌的安裝線性滑軌必須根據機台使用狀況,如受振動、衝擊力的程度,要求的行走精度及機台限制而設定其安裝方法。
S120单轴驱动器选型手册

2) 基本操作面板 BOP20(需单独订货)能读写驱动器参数。 3) 存储卡和 CU320 的存储卡一样,可以互换。
Sinamics S120 AC/AC 驱动器
-4-
西门子(中国)有限公司 自动化与驱动集团 运动控制部
Sinamics S120 系列丛书
4) 控制单元 CU310 DP 技术参数
最大损耗电流 (不包括数字量输出) 数字量输入
电压 低电平 高电平 损耗电流 一般输入信号响应时间 快速输入信号响应时间 数字量输出 (连续短路保护) 输入电压 每路输出最大负载电流 编码器接口 极限频率 最大电缆线长度(TTL 增量编码器) 最大电缆线长度(HTL 增量编码器) 功耗 地线连接 尺寸 mm(宽 x 高 x 深)
S120 AC/AC 产品简易选型手册
-伺服控制模式 -矢量控制模式 -V/F 控制模式 控制电源 环境温度
1 相. 200 V - 240 V AC ±10% (-15% < 1 分钟) 3 相. 380 V - 480 V AC ±10% (-15% < 1 分钟) 47 Hz - 63 Hz 约 1.35 x 进线电压
0 Hz - 650 Hz 0 Hz - 300 Hz 0 Hz - 300 Hz 24 V DC, -15/+20% 0Ċ到+40Ċ
Sinamics S120 系列丛书
目
录
S120 AC/AC 产品简易选型手册
第一章 SINAMICS S120 驱动器的概述 ................................................................................... 2 第二章 控制单元 ....................................................................................................................... 4 1. CU310DP ............................................................................................................................. 4 2. CUA31................................................................................................................................. 5 第三章 功率模块 ...................................................................................................................... 6 1. 模块式功率模块PM340......................................................................................................... 6 2. 机架式功率模块 .................................................................................................................... 6 第四章 订货数据 ....................................................................................................................... 7 1.控制单元及相关附件 ........................................................................................................... 7 2.模块式功率模块................................................................................................................... 7 3.机架式功率模块................................................................................................................. 10 4.编码器转换模块................................................................................................................. 11 5.电缆................................................................................................................................... 11 第五章 订货举例 ..................................................................................................................... 13 1. 系统配置简述...................................................................................................................... 13 2. 单轴系统 ............................................................................................................................. 13 3. 多轴系统 ............................................................................................................................. 14 结束语..................................................................................................................................... 16
艾威图w系列伺服说明书

小心
验收
● 损坏或有故障的产品不可投入使用。
运输
小心
● 必须按产品储运环境条件储存和运输。 ● 不得超高堆放,防止跌落。 ● 转运时产品应包装妥善。 ● 不得拖曳电线、电机轴和编码器搬运伺服电机。 ● 伺服驱动器及伺服电机不得承受外力及撞击。
系统选配
注意
● 伺服电机的额定转矩要高于有效的连续负载转矩。 ● 负载惯量与伺服电机惯量之比应小于推荐值。 ● 伺服驱动器与伺服电机应配套选配。
驱动器型号定义标准
驱动型号标准说明
输入电源要求
驱动器型号 适配电机型号
驱动机芯码
LVD – W 15 H
软件版本号 保修标贴
驱动器基本号 W 系列
H 增量型编码器 T 绝对值编码器
记
记
额定功率
额定功率
号
号
02 200W 15 1.5KW
04 400W 18 1.8KW 05 500W 23 2.3KW 08 750W 25 2.5KW
注意
●受损或零件不全的伺服系统,不可进行安装。 ●伺服驱动器必须与性能匹配的伺服电机配套使用。 ●收货后有任何疑问,请与供应商或艾威图公司联系。
艾威图 W 系列交流伺服驱动器可与国内外多款伺服电机配套, 由用户订货时选择。本手册提供了艾威图 W 系列伺服电机的资料, 其它型号伺服电机有关资料随伺服电机提供。
调试运转
警告
● 通电前应确认伺服驱动器和伺服电机已安装妥善,固定牢固,电源电压及接线正确。 ● 调试时伺服电机应先空载运转,确认参数设置无误后,再作负载调试,防止因错误的操
作导致机械和设备损坏。
小心
接线
● 参与接线或检查的人员都须具有做此工作的充分能力。 ● 接线和检查必须在电源切断 5 分钟后进行。 ● 伺服驱动器和伺服电机必须良好接地。 ● 错误的电压或电源极性可能会引起爆炸或操作事故。 ● 伺服驱动器和伺服电机安装妥当后,才能进行接线。 ● 确保电线绝缘,避免挤压电线,以免电击。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工業機器人
Single Axis Robot
• KK 半導體、電子化系列 • KS, KA 自動化系列
空氣軸承線性馬達定位 平台
Linear Motor Air Bearing Platform
2008年台灣精品金質獎 2007, 2002年台灣精品銀質獎
線性滑軌 Linear Guideway
HG/EG/RG/MG 系列 精密機械/電子半導體/生技醫療 • E2 環保潤滑模組 • Q1 靜音式 • A1 氣淨式
以下列舉了許多不同的應用案例,不單是機構部分的特殊訂製可 以提供,在某些情形下,我們也可以提供伺服控制的整體解決提 案以達到整體生產過程的最佳化。
1.1 實績案例
合理價格的取放及檢測用龍門定位系統
X Y 龍門架構使得許多應用得以更低的成本來實現,以標準元件 構築而成的龍門定位平台。 採用LMX1L系列的定位軸 重現性±2µm 可提供含底座
微米技術及晶圓處理
在微米工程等級的應用以及晶圓設備中尤其重視絕對精度及 潔淨室適用性。採用線性馬達高精度XY平台為最佳選擇。 行程200 mm x 200 mm, 亦可選購 300 mm x 300 mm 全行程平面度±4µm 各軸重現性±1µm 各軸精度±4µm 潔淨室等級100適用, 亦可選購等級10
另一AOI光學檢測應用, 客戶需求要高性能價格比 534mm × 534mm^2行程 LMS27及LMS13龍門 特殊龍門同動控制 鋼材框架 集成線路板輸送, PLC, IPC於客戶端 次微米級重現性 承諾40mm移動可於200ms內收歛至±1.5μm
4
M99TC04-1005
客製玻璃加工機台
線性馬達機台被設計用來承載工作水頭在平台上方移動, 客戶的工作 水頭用來切割雙層玻璃 同動架構線性馬達定位機台() 1300mm × 1450mm行程 平滑運動 正弦波整流, 無頓力 LMC系列馬達 各軸重現性±2μm 剛性機構底座
提供客戶運動規劃服務
雷射掃描
極平滑的運動以及較長使用壽命為選用類似雷射掃描機這 樣的光學檢測系統的重要因素。採用空氣軸承方式的線性 馬達就可以符合這種需求。 使用空氣軸承因此沒有摩擦 完全沒有頓力,因為採用LMC系列線性馬達 行程可長達1500mm
臥式高速合成材質熱溶接機
採用LMX1L系列線性馬達平台搭配絕對式位置編碼光學尺。 開電時無須找尋電機角 由於高加速度,因此在分離合成材質加熱板時不會有牽 絲的情形 以時間力量位置控制熱溶程度 高速換料
M99TC04-1005
3
水刀應用
LMS雙動子線性馬達提供2.5m的長行程帶動兩組HIWIN KK模組做上 下Z軸運動。下面兩軸也是採用LMS高推力線性馬達做同步運動。 提供整體方案,隨插即用 大行程 含底座,護蓋及高階運動控制器
AOI光學檢測整體解決方案
下軸採用LMC系列線性馬達使得AOI光學檢測可以達到相當高的平滑 運動及優良的取像;上軸利用LMS馬達帶動Z軸的螺桿及CCD鏡頭達 到高速運動。 重現性±1µm 速度漣波小於1.5% 提供機台底座及護蓋之整體解決方案
微細加工到大工件的加工
適用於以雷射或刀具實施之微細結構的加工,充分利用了小型龍 門結構的特性,同樣提供了合理價格的解決方案。 採用運動特性平順的LMC系列線性馬達 重現性±2µm 經過大量實際應用的考驗
平面馬達
平面伺服馬達提供了一個最佳的檢測定位解決方案,比方說,印 刷電路板PCB的檢測,在馬達可動部上裝置CCD鏡頭拍攝板子上 的印刷電路是否完整及SMD元件。
Fa Fc Fp 動子與定子間的磁吸力,必須由導軌吸收。 馬達連續推力,在正常持續驅動下會使線圈溫昇至 70-80℃。 短暫的瞬間推力,當以Ip電流打入線圈時產生,此時馬達 操作在接近非線性區,若無強制冷卻,溫昇會急劇增加。
1.3.2 與線圈有關的量
Ic Ip Kf Kv 產生連續推力的電流 產生短暫大推力的瞬間峰值電流 計算推力的線圈特性值,公式為:F = I x Kf 當馬達在發電時隨著運動速度而產生反電動勢的線圈特性 值, 公式為:Ug = Kv x v
當對馬達線圈施以100%負載率(duty cycle)之連續電流時,馬達 可以產生之推力或扭矩稱之。
連續電流 (參考1.3 Ic)
這個電流是可以持續供應給馬達線圈的電流。通常以這個電流 流過線圈時,溫度最高不會超過80℃。
馬達常數Km (參考1.3 Km)
為推力對消耗功率的比值,代表馬達的效率。
解析度
R25 25℃時的線圈電阻;當溫昇到80℃電阻會升高到大約1.2倍。
Pvp 在 Ip 時的峰值功率 Pc T 在 Ic 時的連續功率
馬達線圈允許的操作溫度,通常藉由溫度開關監控,馬達 的表面溫度與下列因素有關: 實際安裝狀況 (定位平台的大小) 散熱條件 (冷卻板) 驅動狀況 因此實際溫度只能用上述條件來決定。
偏心
是指轉矩馬達在旋轉時旋轉中心偏移的量,主要是由組裝對心 和軸承的公差所決定。
加速度
每單位時間的速度變化量,即加速度 = 速度 / 時間 或a=v/t
推力,扭矩
直線運動之推力,或旋轉運動之扭矩分別以不同的環境狀況而 有不同的定義值。通常有: 室溫20℃ 線圈溫度80℃ 100%負載率(duty cycle) 之連續推力,連續扭矩,或瞬間推力,瞬間扭矩等定義。
Positioning Guideway
2004年台灣精品金質獎
線性伺服馬達
• 無鐵心式 (LMC)
2002年台灣精品獎 2001年中小企業創新研究獎
Linear Synchronous Motor
線性致動器
Linear Actuator
• 醫療/自動化/工業用
2003, 2010年台灣精品金質獎
2009年台灣精品銀質獎
M99TC04-1005
5
運動解析度
為定位系統可以重複運動的最小距離,影響的因素有位置回饋 系統解析度,控制器驅動器的解析度加上機構背隙等等。
精度
定義為目標位置與實際位置之間的誤差。這樣子的系統化或線 性的偏差可能的來源有:餘弦誤差,角度誤差,螺桿誤差,熱 膨脹等等因素。精度請勿與重現精度混淆。
磁性吸引力Fa
為馬達線圈的特性之一,定義為單位電流的推力,把此參數乘 以電流即可得到推力: F = I x Kf
連續推力,連續扭矩 (參考1.3 Fc)
重現性
請勿與絕對精度混淆,一個線性定位軸通常會有較差的絕對精 度,與較好的重現精度。由一定以上的距離實施多次由同一個方 向往目標位置移動所量測的結果稱之為單方向的重現性,在這樣 的情形下,諸如背隙的影響並不存在;如果量測時往目標逼近的 方向是不同的,則所得的結果為雙方向的重現性,此時會量得含 背隙的結果。
M99TC04-1005
7
2
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9
線性馬達平台
產品一覽 第 8 頁 第 10 頁 第 11 頁 第 12 頁 第 13 頁 第 14 頁 第 19 頁 第 27 頁 第 29 頁 第 33 頁
線性馬達平台特性
線性馬達系統 Linear Motor System
技術手冊 Technical Information
高速化
高精度
複合化
環保
生活化
2005年台灣精品金質獎
2004年台灣精品獎
滾珠螺桿 Ballscrew
• 重負荷滾珠螺桿全電式射出成型機
定位線性滑軌
位置量測系統
Positioning Measurement System
2009, 2008年台灣精品金質獎 2006, 2001,1993年台灣精品銀質獎
滾珠螺桿 Ballscrew
精密研磨/精密轉造 • 高速化 (高 Dm-N 值 /Super S 系列) • 重負荷 • E2 環保潤滑模組 • R1 螺帽旋轉式
定位系統
訂製定位系統
1.2 技術用語
為反電動勢電壓(rms)對轉速(rpm)或速度(m/s)的比率。反電動 勢為發生於線圈在永久磁鐵上移動時所產生的電壓。例如伺服馬 達中。
反電動式常數 (參考1.3 Ku)
真直度(或水平直線度)
沿著X方向前進時的水平直線運動特性,當這個規格不好的時 候沿著X方向運動時,會產生Y方向的偏差。
為所採用的位置回饋系統本身所能量測的最小距離,請勿與運 動解析度混淆,通常運動解析度會粗於解析度。
剛性
為機構(含零件或組件)抵抗變形的能力,通常分為靜態剛性與動 態剛性。 靜態剛性為外力已經完全靜止不變動時機構的抗變形 特性; 動態剛性為機構對變動外力的抗變形彈力特性。
偏擺
為迴轉馬達在轉動的同時上平面的角度偏差。隨著旋轉,馬達 的上平面會斜來斜去,所造成的角度。主要的原因為軸承的公 差所引起。
線性馬達驅動的X-Y平台
Linear Motor X-Y Robot
2006年台灣精品銀質獎 2007年中小企業創新研究獎
TMS直驅式定位平台
TMS Direct-Driver Positioning System
線性馬達龍門系統
Linear Motor Gantry
訂製定位系統
1~6頁
線性馬達定位平台
由於使用非接觸式空氣軸承,幾乎沒有摩耗 在整個平面上可以達到很好的平面度(最大1000mm平方) 重現性±3µm
2
M99TC04-1005
定位系統
訂製定位系統
高等級的晶圓品質管制、光罩製作
晶圓表面的管制以及晶圓或玻璃面板的光罩通常需要採用空 氣軸承式的XY平台,以檢測出極微小的缺陷或製作出高精度 的光罩。例如電子業,晶片工業以及平面顯示器業裡面都採 用這種方式。 平面度±2µm 重現性±0.5µm 精度±1.5µm