弯心坐标的通式推导及其应用
曲线坐标计算万能公式

曲线坐标计算通用公式(复化Simpson 公式)推导一、已知条件1、线元起点坐标:(),A A A x y2、线元起点切线方位角:A α3、线元起点里程:A K4、线元终点里程:B K 5、线元起点曲率半径:A ρ 6、线元终点曲率半径:B ρ二、求解问题求线元上任意点的坐标:(),C x y 。
即推导曲线坐标计算通用公式。
三、图示:如右上图(图中未示y ∆值) 四、坐标计算公式线元上任意点C 的坐标计算公式为:A x x x =+∆————① A y y y =+∆————②由上式可知,关键问题是求出x ∆、y ∆。
五、x ∆计算若AC 是直线,直接采用公式cos x l α∆=可求出x ∆(其中l 为A 、C 两点间直线距离,α为AC 直线方位角),但是,A 、C 两点间是任意曲线相连,不能直接用上述公式计算x ∆,需利用微积分原理计算。
1、曲线AB 上任意一点的曲率ρ计算采用内插法得:()B AA AB Ak k k k ρρρρ-=+--————③其中:k ——曲线AB 上任意一点的里程。
2、曲线AB 上任意一点的切线方位角α计算如右图:C 是曲线AB 上任意一点,AT 、TC 是A 、C 两点的切线,利用圆曲线求弧长公式得:()90A A k k A R π-=()90A k k Rδβπ-==其中:k ——曲线上任意点里程。
R ——曲线上任意点的曲率半径。
(通过公式③求得,1R ρ=)()()1190A A A R R k k ααπ=++-()()90A A A k k αρρπ=++-————④ 使用公式③、④时的符号规定:线元右偏:A ρ、B ρ均为“+”(即线元起终点曲率半径输正值)。
线元左偏:A ρ、B ρ均为“—”(即线元起终点曲率半径输负值)。
3、x ∆计算根据公式③、④可推知,()cos y k α=⎡⎤⎣⎦是里程间隔[],A C k k 上k 的一个连续函数,计算A 、C 两点的坐标增量x ∆,也就是求在里程段[],A C k k 内,x 坐标的改变量。
弯心坐标的通式推导及其应用说课材料
弯心坐标的通式推导
及其应用
弯心坐标的通式推导及其应用
[摘要]针对开口薄壁截面梁的剪流和弯心坐标的复杂计算问题,导出了简便计算公式。
对于由n个小矩形组成的开口薄壁截面,可以用图乘法计算弯心坐标避免了复杂的积分运算。
[关键词]开口薄壁截面;弯心坐标;剪流;静矩
当横向外力不作用于梁的纵向对称平面,而是非纵向对称平面的形心主惯性平面内时,要使得梁仍然只产生平面弯曲而不产生扭转变形,外力必须作用于特定的直线上。
由此,将梁在横向外力作用下,于两个形心主惯性平面内分别发生弯曲时,其横截面上两个剪力作用线的交点称为弯曲中心,简称弯心。
在工程上,如果横向外力作用线未通过弯心,则容易因扭转变形造成失稳。
所以,确定梁的弯心位置有着非常重要的工程意义。
在重庆大学出版社出版的《材料力学》(2011版)的第六章6.6节中,采用切应力流的概念推导了弯心,在随后的实际应用过程中,则主要套用了矩形
*
截面梁上任一点的弯曲切应力计算公式=-FSSz。
bi z
1.弯心坐标的通式推导
为了推导弯心坐标的通式,采用书上推导弯心定义时的切应力流的概念,首先计算切应力流
dx。
坐标旋转变换公式推导过程
坐标旋转变换公式推导过程1. 旋转变换的基本概念在计算机图形学中,我们经常需要对图形对象进行旋转变换。
旋转变换是一种常见的线性变换,可以帮助我们调整图形的方向和角度。
旋转变换通常涉及到一个旋转角度和一个旋转中心。
2. 二维空间中的坐标旋转我们先来看二维空间中的坐标旋转。
假设有一个二维空间中的点P(x, y),我们要将该点绕原点(0, 0)旋转一个角度θ,得到新的点P’(x’, y’)。
根据坐标旋转变换公式的推导过程,我们可以得到如下的数学表达式:x’ = x * cos(θ) - y * sin(θ) y’ = x * sin(θ) + y * cos(θ)3. 推导过程步骤一:旋转变换矩阵的推导我们知道,对于二维空间中的点P(x, y),我们可以用齐次坐标来表示为P(x, y, 1)。
而旋转变换可以表示为一个2x2的矩阵R:R = | cos(θ) -sin(θ) | | sin(θ) cos(θ) |步骤二:推导旋转变换的推导根据矩阵乘法的定义,我们可以得到旋转后的点P’:P’ = R * P展开计算得到:x’ = x * cos(θ) - y * sin(θ) y’ = x * sin(θ) + y * cos(θ)因此,从矩阵和坐标的角度上,我们成功推导出了二维空间中的坐标旋转变换公式。
4. 结论通过上述推导过程,我们可以得到二维空间中坐标旋转变换的具体数学表达式。
这些公式在计算机图形学和计算机视觉中具有重要的应用价值,能够帮助我们实现各种旋转形变效果。
在实际的编程实现中,我们可以根据这些公式进行简单的计算,从而实现图形的旋转变换效果。
希望本文的推导过程对读者有所帮助,引发对坐标旋转变换公式的更深一步探索和研究。
参考资料•计算机图形学教程•计算机视觉基础理论以上就是坐标旋转变换公式推导过程的详细内容,希望对您有所帮助。
圆弧的形心推导过程
圆弧的形心推导过程
我们要推导圆弧的形心位置。
形心是一个几何形状的质量中心,假设该形状的密度是均匀的。
对于圆弧,其形心并不在圆弧上,而是在圆弧所对应的圆心的某个位置上。
假设圆弧所对应的完整圆的半径为R,圆弧的圆心角为θ(单位为弧度)。
首先,我们知道一个完整圆的形心就是其圆心。
但对于圆弧,其形心会偏向圆弧的中心方向。
为了找到这个形心,我们可以使用Pappus定理的一个推论,该推论给出了均匀圆弧对其直径的静矩(也称为一阶矩)。
静矩公式为:S = (θ/2π) ×π×R^2 ×R = (θ×R^3) / 2
其中,S 是圆弧对其直径的静矩,θ是圆弧的圆心角(弧度制),R 是圆的半径。
而形心到圆弧底边的距离d 可以通过以下公式得到:
d = S / (1/2 ×θ×R^2) = (2 ×S) / (θ×R^2)
将静矩S 的公式代入上式,我们可以得到 d 的表达式。
现在我们要来计算d 的值。
计算结果为:d = R
所以,圆弧的形心到其底边的距离为:R。
需要注意的是,这个距离是从圆弧的底边(即弦)垂直测量
到形心的距离,而不是从圆心到形心的距离。
这个结果似乎有些问题,因为通常圆弧的形心不会恰好在圆的半径上。
这可能是由于我们在推导过程中使用了不恰当的假设或公式。
实际上,圆弧的形心位置与圆弧的角度和半径都有关,并且通常需要通过积分来计算。
对于小于半圆的圆弧,形心会偏向圆弧的中心;对于大于半圆的圆弧,形心会偏向圆弧的外侧。
心形的柱坐标方程
心形的柱坐标方程可以用以下步骤进行推导:首先,我们需要明确心形曲线的参数方程。
在三维空间中,心形曲线通常可以用以下参数方程表示:x = a*cos(t) + b*sin(t)y = c*cos(t) - d*sin(t)z = √{a^2 + c^2 - 2ac*cos(t)}其中,a、b、c、d为常数,t为参数。
这个参数方程描述了心形曲线在三维空间中的位置。
现在,我们可以将上述参数方程转化为柱坐标系下的方程。
在柱坐标系中,半径r、高h和角度θ之间的关系为:r = h/(sinθ)。
因此,我们可以将参数方程中的x、y和z分别表示为半径、高和角度的函数,即:r = x/hh = zθ= atan(y/x)将上述关系代入心形曲线的参数方程中,得到柱坐标下的心形曲线方程:r = a*cos(t) + b*sin(t)/hh = zθ= atan(b*sin(t) - d*cos(t))/(a*cos(t))为了方便起见,我们假设a、b、c、d均为正数。
此时,可以将上述方程整理为柱坐标下的心形曲线的一般形式:ρ= a*(cosθ+ sinθ)^3 + b*(sinθ- cosθ)^3其中,ρ表示圆柱坐标系中的半径,可以通过r、h和θ的关系将r转化为ρ。
在这个方程中,我们可以通过替换θ的值来得到不同角度下的心形曲线。
需要注意的是,由于上述方程使用了高次幂,所以心形曲线可能并不唯一,不同角度下的心形曲线可能会有所不同。
另外,在实际应用中,我们通常需要将上述方程进行简化或者进行特殊形状的变换。
例如,我们可以将上述方程中的θ用参数a来表示,得到柱坐标下的心形曲线的简化形式:ρ= a*(3cos^3θ- 3sin^3θ) + b*(3sin^3θ- cos^3θ)这个方程可以被简化为:ρ= 2a*cos^3θ+ 2b*sin^3θ- a*(b^2 + 4a^2)*cos^2θ+ 4ab*sin^2θ+ b^3这个方程可以用于绘制不同角度下的心形曲线。
三角形重心坐标公式怎么推
三角形重心坐标公式怎么推
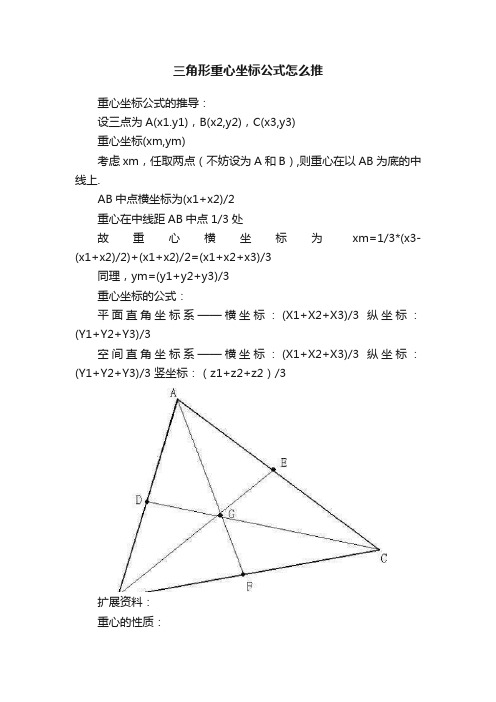
重心坐标公式的推导:
设三点为A(x1.y1),B(x2,y2),C(x3,y3)
重心坐标(xm,ym)
考虑xm,任取两点(不妨设为A和B),则重心在以AB为底的中线上.
AB中点横坐标为(x1+x2)/2
重心在中线距AB中点1/3处
故重心横坐标为xm=1/3*(x3-(x1+x2)/2)+(x1+x2)/2=(x1+x2+x3)/3
同理,ym=(y1+y2+y3)/3
重心坐标的公式:
平面直角坐标系——横坐标:(X1+X2+X3)/3 纵坐标:(Y1+Y2+Y3)/3
空间直角坐标系——横坐标:(X1+X2+X3)/3 纵坐标:(Y1+Y2+Y3)/3 竖坐标:(z1+z2+z2)/3
扩展资料:
重心的性质:
1、重心到顶点的距离与重心到对边中点的距离之比为2︰1。
2、重心和三角形任意两个顶点组成的3个三角形面积相等。
即重心到三条边的距离与三条边的长成反比。
3、重心到三角形3个顶点距离的平方和最小。
4、以重心为起点,以三角形三顶点为终点的三条向量之和等于零向量。
外心的性质:
1、三角形的三条边的垂直平分线交于一点,该点即为该三角形的外心。
2、若O是△ABC的外心,则∠BOC=2∠A(∠A为锐角或直角)或∠BOC=360°-2∠A(∠A为钝角)。
3、当三角形为锐角三角形时,外心在三角形内部;当三角形为钝角三角形时,外心在三角形外部;当三角形为直角三角形时,外心在斜边上,与斜边的中点重合。
坐标旋转变换公式推导

坐标旋转变换公式推导在我们学习数学的过程中,坐标旋转变换公式就像是一个神秘的魔法,能让图形在坐标系中奇妙地转动起来。
今天,咱们就一起来揭开它神秘的面纱,好好推导推导这个神奇的公式。
话说有一天,我在教室里给学生们讲这个知识点。
我刚在黑板上写下“坐标旋转变换公式”这几个字,下面就传来一阵小小的嘀咕声。
“这听起来好难啊!”一个学生皱着眉头说。
我笑了笑,心里想着,得让他们感受到这其实没那么可怕。
咱们先从最简单的情况说起。
假设在平面直角坐标系 xOy 中,有一个点 P(x, y) ,现在我们要把这个坐标系绕着原点 O 逆时针旋转一个角度θ ,得到新的坐标系 x'Oy' 。
那点 P 在新坐标系中的坐标 (x', y') 会是多少呢?为了搞清楚这个,咱们先来看看旋转前后点 P 到原点 O 的距离 r 是不变的。
根据勾股定理,r = √(x² + y²) 。
接下来,咱们看看角度的关系。
在原来的坐标系中,点 P 与 x 轴正半轴的夹角是α ,那么tanα = y / x 。
旋转之后,新的角度是α + θ 。
那么在新坐标系中,x' = r cos(α + θ) ,y' = r sin(α + θ) 。
根据三角函数的和角公式,cos(α + θ) = cosα cosθ - sinα sinθ ,sin(α + θ) = sinα cosθ + cosα sinθ 。
因为cosα = x / r ,sinα = y / r ,所以x' = r (cosα cosθ - sinα sinθ) = x cosθ - y sinθ ,y' = r (sinα cosθ + cosα sinθ) = x sinθ + y cosθ 。
这就是坐标旋转变换的公式啦!讲完这些,我看了看学生们的表情,还是有一些迷茫。
于是我又在黑板上画了一个具体的例子,一个点 (3, 4) ,旋转 45 度。
曲线坐标计算公式及例题
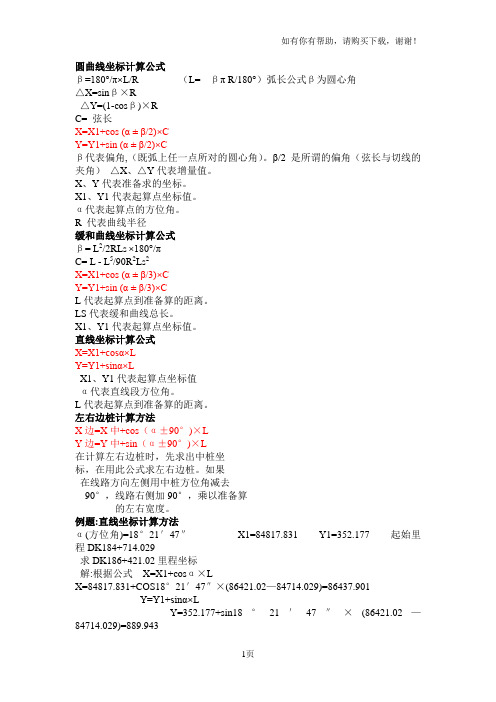
圆曲线坐标计算公式β=180°/π×L/R (L= βπ R/180°)弧长公式β为圆心角△X=sinβ×R△Y=(1-cosβ)×RC= 弦长X=X1+cos (α ±β/2)×CY=Y1+sin (α ±β/2)×Cβ代表偏角,(既弧上任一点所对的圆心角)。
β/2是所谓的偏角(弦长与切线的夹角)△X、△Y代表增量值。
X、Y代表准备求的坐标。
X1、Y1代表起算点坐标值。
α代表起算点的方位角。
R 代表曲线半径缓和曲线坐标计算公式β= L2/2RL S ×180°/πC= L - L5/90R2L S2X=X1+cos (α ±β/3)×CY=Y1+sin (α ±β/3)×CL代表起算点到准备算的距离。
LS代表缓和曲线总长。
X1、Y1代表起算点坐标值。
直线坐标计算公式X=X1+cosα×LY=Y1+sinα×LX1、Y1代表起算点坐标值α代表直线段方位角。
L代表起算点到准备算的距离。
左右边桩计算方法X边=X中+cos(α±90°)×LY边=Y中+sin(α±90°)×L在计算左右边桩时,先求出中桩坐标,在用此公式求左右边桩。
如果在线路方向左侧用中桩方位角减去90°,线路右侧加90°,乘以准备算的左右宽度。
例题:直线坐标计算方法α(方位角)=18°21′47″X1=84817.831 Y1=352.177 起始里程DK184+714.029求DK186+421.02里程坐标解:根据公式X=X1+cosα×LX=84817.831+COS18°21′47″×(86421.02—84714.029)=86437.901Y=Y1+sinα×LY=352.177+sin18°21′47″×(86421.02—84714.029)=889.943求DK186+421.02里程左右边桩,左侧3.75m,右侧7.05m.解:根据公式线路左侧计算:X边=X中+cos(α±90°)×LX边=86437.901+cos(18°21′47″- 90°)×3.75=86439.082Y边=Y中+sin(α±90°)×LY边=889.943+sin(18°21′47″- 90°)×3.75=886.384线路右侧计算:X边=X中+cos(α±90°)×LX边=86437.901+cos(18°21′47″+ 90°)×7.05=86435.680Y边=Y中+sin(α±90°)×LY边=889.943+sin(18°21′47″+90°)×7.05=896.634例题:缓和曲线坐标计算方法α(ZH点起始方位角)=18°21′47″X1=86437.901 Y1=889.941 起始里程DK186+421.02曲线半径2500 缓和曲线长120m求HY点坐标,也可以求ZH点到HY点任意坐标解:根据公式β=L2/2RLS×180°/πβ={1202/(2×2500×120)}×(180°/π)= 1°22′30.36″C=L-L5/90R2LS2C=120-1205/(90×25002×1202)=119.997X=X1+cos(α±β/3)×CX=86437.901+cos(18°21′47″-1°22′30.36″/3)×119.997=86552.086Y=Y1+sin(α±β/3)×CY=889.941+sin(18°21′47″-1°22′30.36″/3)×119.997=926.832求DK186+541.02里程左右边桩,左侧3.75m,右侧7.05m.解:根据公式线路左侧计算:X边=X中+cos(α±90°)×LX边=86552.086+cos{(18°21′47″-1°22′30.36″)- 90°}×3.75=86553.182Y边=Y中+sin(α±90°)×LY边=926.832+sin{(18°21′47″-1°22′30.36″)- 90°}×3.75=923.246线路右侧计算:X边=X中+cos(α±90°)×LX边=86552.086+cos{(18°21′47″-1°22′30.36″)+ 90°}×7.05=86550.026Y边=Y中+sin(α±90°)×LY边=926.832+sin{(18°21′47″-1°22′30.36″)+ 90°}×7.05=933.574缓和曲线方位角计算方法α=(起始方位角±β偏角)= 18°21′47″-1°22′30.36″=16°59′16.64″注:缓和曲线在计算坐标时,此公式只能从两头往中间推,只能从ZH点往HY点推,HZ点往YH点推算,如果YH往HZ点推算坐标,公式里的β为β2/3.例题:圆曲线坐标计算方法α(HY点起始方位角)= 16°59′16.64″X1=86552.086 Y1=926.832曲线半径2500 曲线长748.75 起始里程DK186+541.02求YH点坐标,也可以求QZ点坐标或任意圆曲线一点坐标.解:根据公式β=180°/π×L/Rβ= 180°/π×748.75/2500=17°09′36.31″△X=sinβ×R△X=sin17°09′36.31″×2500=737.606△Y=(1-cosβ)×R△Y=(1-cos17°09′36.31″)×2500=111.290C= 弦长C=745.954X=X1+cos(α±β/2)×CX= 86552.086 +cos(16°59′16.64″+360°-17°09′36.31″/2) ×745.954=87290.023Y=Y1+sin(α±β/2)×CY=926.832+ sin(16°59′16.64″+360°-17°09′36.31″/2) ×745.954=1035.905圆曲线方位角计算方法α=(起始方位角±β偏角)= 16°59′16.64″+360°-17°09′36.31″=359°49′40.33″求DK187+289.77里程左右边桩,左侧3.75m,右侧7.05m.解:根据公式线路左侧计算:X边=X中+cos(α±90°)×LX边=87290.023+cos(359°49′40.33″-90°)×3.75=87290.012Y边=Y中+sin(α±90°)×LY边=1035.905+sin(359°49′40.33″-90°)×3.75=1032.155线路右侧计算:X边=X中+cos(α±90°)×LX边=87290.023+cos(359°49′40.33″+90°)×7.05=87290.044Y边=Y中+sin(α±90°)×LY边=1035.905+sin(359°49′40.33″+90°)×7.05=1042.955。
三角形内心坐标计算公式(三角形内心坐标公式推导最简单)

三角形内心坐标计算公式(三角形内心坐标公式推导最简单) 大家好,今天给各位分享三角形内心坐标计算公式的一些知识,其中也会对三角形内心坐标公式推导最简单进行解释,文章篇幅可能偏长,如果能碰巧解决你现在面临的问题,别忘了关注本站,现在就马上开始吧!本文目录形心坐标公式求三角形内心的坐标已知一个三角形三顶点坐三角形的内心公式是什么数学中三角形内心的坐标公式是己知三点坐标求所成三角形内心坐标三角形内心坐标公式推导最简单三角形外心坐标计算公式形心坐标公式形心坐标计算公式是∫∫Dxdxdy=重心横坐标某D的面积,∫∫Dydxdy=重心纵坐标某D的面积。
扩展资料:高等数学作为大多数专业研究生考试的必考科目,其有自己固有的特点,大纲几乎不变,注重基本知识点的考察,注重学生的综合应用能力,考察学生解题的技巧。
二重积分作为考研数学必考的知识点,在解题方面有一定的技巧可循,针对研究生考试中二重积分的考察给出具有参考性的解题技巧。
二重积分的一般计算步骤如下:画出积分区域D的草图,根据积分区域D以及被积函数的特点确定合适。
求三角形内心的坐标已知一个三角形三顶点坐三角形内心坐标是三个横坐标取平均值,三个纵坐标取平均值。
因此内心坐标O(x,y)x=(1+8+3)/3=4y=(2+9+10)/3=7三角形的内心公式是什么三角形的内心公式是ai=2S/b+c-a,其中ai为三角形内心到边ai的距离,S为三角形的面积,a、b、c为三角形的三条边。
这个公式的原理是根据三角形的内切圆性质得出的。
内心是三角形内接圆圆心,内接圆是三角形内切于三边的圆,所以根据内接圆性质,可以得到内心公式。
此外,三角形有很多重要的定理和公式,如勾股定理、正弦定理、余弦定理等,这些都是研究三角形的基础知识,对于数学和物理等科学领域的学习都有很重要的作用。
数学中三角形内心的坐标公式是内心是角平分线的交点,到三边距离相等.设:在三角形ABC中,三顶点的坐标为:A(x1,y1),B(x2,y2),C(x3,y3)BC=a,CA=b,AB=c内心为M(X,Y)M((aX1+bX2+cX3)/(a+b+c),(aY1+bY2+cY3)/(a+b+c))内心是角平分线的交点,到三边距离相等.设:在三角形ABC中,三顶点的坐标为:A(x1,y1),B(x2,y2),C(x3,y3)BC=a,CA=b,AB=c内心为M(X,Y)M((aX1+bX2+cX3)/(a+b+c),(aY1+bY2+cY3)/(a+b+c))己知三点坐标求所成三角形内心坐标内心是角平分线的交点,到三边距离相等.设:在三角形ABC中,三顶点的坐标为:A(x1,y1),B(x2,y2),C(x3,y3)BC=a,CA=b,AB=c内心为M(X,Y)则有aMA+bMB+cMC=0(三个向量)MA=(X1-X,Y1-Y)MB=(X2-X,Y2-Y)MC=(X3-X,Y3-Y)则:a(X1-X)+b(X2-X)+c(X3-X)=0,a(Y1-Y)+b(Y2-Y)+c(Y3-Y)=0∴X=(aX1+bX2+cX3)/(a+b+c),Y=(aY1+bY2+cY3)/(a+b+c)∴M((aX1+bX2+cX3)/(a+b+c),(aY1+bY2+cY3)/(a+b+c))三角形内心坐标公式推导最简单您好,三角形内心坐标公式可以用数学方法推导出来,但是需要一定的数学知识。
心形曲线极坐标方程推导

心形曲线极坐标方程推导心形曲线是一种美丽而富有韵律的几何形状,它的极坐标方程可以通过一系列推导来得到。
在这篇文章中,我们将从最基础的概念开始,逐步推导出心形曲线的极坐标方程,并解释其几何意义和数学特性。
首先,让我们回顾一下极坐标的基本概念。
在极坐标中,一个点的位置由它到极点的距离和与极轴的夹角来确定。
假设我们有一个点P,它的极坐标表示为(r,θ)。
其中,r表示点P到极点O的距离,θ表示点P到极轴的夹角。
接下来,让我们来考虑心形曲线的定义。
心形曲线是指在平面上的一条曲线,它的轨迹形状类似于一个心形。
通常来说,心形曲线可以用数学方程来描述。
现在,让我们开始推导心形曲线的极坐标方程。
首先,我们来考虑一个简单的情况:心形曲线的基本形状。
心形曲线可以看做是由两个对称的圆形组成的。
假设这两个圆的半径分别为a和b,我们可以将它们的极坐标方程分别表示为:r1=a*cos(θ)r2=b*cos(θ)其中,r1和r2分别表示两个圆上任意一点的极坐标半径,θ表示与极轴的夹角。
现在,我们希望将这两个圆形合并成一个心形曲线。
为了实现这一点,我们可以将两个圆形的极坐标方程相加。
这样,我们就可以得到心形曲线的极坐标方程:r=a*cos(θ)+b*cos(θ)这就是心形曲线的极坐标方程。
通过这个方程,我们可以在极坐标系中绘制出心形曲线的形状。
接下来,让我们来分析一下这个极坐标方程的几何意义。
我们可以看到,当θ=0时,r=a+b;当θ=π时,r=a-b。
这意味着心形曲线在极轴上的最远点到极点的距离为a+b,在极轴上的最近点到极点的距离为a-b。
这也解释了为什么心形曲线的形状类似于一个心形的原因。
此外,我们还可以通过对极坐标方程进行一些变换来得到其他形式的心形曲线。
例如,我们可以将极坐标方程中的cos(θ)改为sin(θ):r=a*sin(θ)+b*sin(θ)这样就得到了另一种形式的心形曲线。
通过这种方法,我们可以得到许多不同形式的心形曲线,它们的形状也各有特点。
爱心直角坐标方程式
爱心直角坐标方程式爱心是象征着爱情、友情和关爱的美好象征。
有一种特殊的数学公式,可以用直角坐标系表示出一个美丽的爱心形状。
这个公式被称为“爱心直角坐标方程式”。
爱心形状的描述爱心形状是由两个对称的半圆形状组成,它们通过一个垂直线段连接在一起。
这种造型使得它酷似一个真正的爱心。
爱心直角坐标方程式的推导要推导出爱心直角坐标方程式,首先需要了解直角坐标系。
直角坐标系包含两个轴:x轴和y轴。
在这个坐标系中,每一个点都可以由一个有序对(x, y) 来表示,其中 x 表示横坐标,y 表示纵坐标。
爱心直角坐标方程式的推导利用了二次方程的性质。
下面是爱心直角坐标方程式的推导过程:1.从一个半圆出发。
我们可以以任意半径为基准,选取一个半圆来开始推导。
这个半圆的圆心位于 (0, r),其中 r 表示半圆的半径。
2.确定半圆内部的点集。
为了得到一个完整的爱心形状,我们需要确定半圆内部的所有点集。
假设半圆的圆心位于 (0, r),半径为 r,那么所有在这个半圆内的点集可以由参数方程给出:x = r - sqrt(r^2 - y^2)这个参数方程描述了半圆内任意一个点的横坐标 x 是如何随着纵坐标y 的变化而变化的。
3.绘制对称面上的点。
在直角坐标系中,我们只需要在半圆内部的一个象限中绘制点集,然后通过对称操作,在其他象限中也能得到相应的点集。
在我们选定的半圆内,绘制出位于 (x, -y) 处的所有点,这样就得到了半圆上的对称面上的点集。
4.连接两个半圆。
通过绘制一个垂直线段,将两个半圆连接在一起,从而得到完整的爱心形状。
爱心直角坐标方程式的数学符号表示根据上述推导过程,我们可以将爱心直角坐标方程式用数学符号表示:x = r * (cos(t))^3 y = r * (sin(t))^3其中 t 的取值范围为[0, 2π],r 表示半圆的半径。
这个方程组描述了一个爱心形状的曲线。
通过改变 r 的值,我们可以调整爱心的大小。
点旋转后的坐标公式

点旋转后的坐标公式1. 绕原点旋转。
- 设点P(x,y)绕原点O逆时针旋转θ角后得到点P'(x',y')。
- 根据三角函数的知识,我们可以得到以下坐标变换公式:- x' = xcosθ - ysinθ- y'=xsinθ + ycosθ- 推导过程:- 我们可以将点P(x,y)看作是向量→OP,其模长r = √(x^2)+y^{2},设α是向量→OP与x轴正方向的夹角,则x = rcosα,y = rsinα。
- 当点P绕原点逆时针旋转θ角后,新的点P'对应的向量→OP'与x轴正方向的夹角为α+θ。
- 那么x'=rcos(α + θ)=r(cosαcosθ-sinαsinθ)=xcosθ - ysinθ- y' = rsin(α+θ)=r(sinαcosθ+cosαsinθ)=xsinθ + ycosθ2. 绕任意点Q(a,b)旋转。
- 首先将点P(x,y)平移,使得点Q(a,b)为原点,即将点P的坐标变为(x - a,y - b)。
- 然后按照绕原点旋转的公式,将(x - a,y - b)绕原点(此时Q为原点)逆时针旋转θ角,得到(x' - a,y' - b),其中x' - a=(x - a)cosθ-(y - b)sinθ,y' - b=(x - a)sinθ+(y - b)cosθ。
- 最后再将坐标平移回去,得到绕点Q(a,b)旋转后的点P'的坐标公式:- x'=(x - a)cosθ-(y - b)sinθ+a- y'=(x - a)sinθ+(y - b)cosθ + b1. 绕x轴旋转。
- 设点P(x,y,z)绕x轴逆时针旋转θ角后得到点P'(x',y',z')。
- 坐标变换公式为:- x'=x- y' = ycosθ - zsinθ- z'=ysinθ+zcosθ2. 绕y轴旋转。
圆曲线和缓和曲线坐标推算公式(附带例题)

圆曲线和缓和曲线坐标推算公式一、直线上的坐标推算⎩⎨⎧++0i m i0i m i sina L Y Y cosa L X X == 式中:Xm 、Ym ——直线段起点M 坐标Li ——直线段上任意点i 到线路起点M 的距离 a 0——直线段起点M 到JD1的方位角 二、圆曲线上任一点的坐标推算①、圆曲线上任一点i 相对应的圆心角:i i L R180πϕ︒=式中:Li ——圆曲线上任一点i 离开ZY 或YZ 点的弧长②、圆曲线上任一点i 的直角坐标:⎩⎨⎧-)(==i iii cos 1R Y Rsin X ϕϕ(可不计算).③、圆曲线ZY 或YZ 点到任一点i 的偏角:i ii L R902πϕ︒∆==④、圆曲线ZY 或YZ 点到任一点i 的弦长:)sin(2)2sin(2C i i iR R ∆=ϕ=⑤、圆曲线ZY 或YZ 点到任一点i 的弦长的方位角:i jd yz jd zy i a a ∆±→→或=⑥、所以圆曲线上任意点i 的坐标为:⎩⎨⎧++i i YZ ZY iii YZ ZY i sina C Y Y cosa C X X 或或==例题:已知一段圆曲线,R=3500m ,Ls =553.1m ,交点里程K50+154.734,ZY 点到JD 方向方位角为A=129°23′18.3″,右偏9°3′15.8″,ZY 点里程K49+877.607,YZ 点里程K50+430.707,起点坐标为x =389823.196,y =507787.251,求K50+200处中点坐标及左右各偏12.5m 的坐标。
解:K50+200处的曲线长度为Li =322.393mK50+200相对应的方位角:"'︒⨯⨯︒︒52.39165393.3223500180L R 180i ===ππa K50+200相对应的偏角:"'︒⨯⨯︒︒∆76.19382393.322350090L R 902i ii ====ππϕ K50+200到zy 点的弦长:m 279.32276.19382sin 35002Rsin 2C i i ==="'︒⨯⨯∆ zy 点到K50+200中桩的方位角:"'︒"'︒+"'︒∆+→06.38113276.193823.1823129a a i jd zy i ===K50+200左、右偏12.5m 的方位角:"'︒︒-"'︒︒-+82.5739449082.573913490a a ===左i A "'︒︒+"'︒︒++82.57391349082.573913490a a ===右i A 所以K50+200处的坐标为:⎩⎨⎧"'︒⨯++"'︒⨯++6484.50802606.381132sin 279.322251.507787sina C Y Y 4354.38960706.381132cos 279.322196.389823cosa C X X i i ZY ii i ZY i ======K50+200左偏12.5m 的坐标为:⎩⎨⎧"'︒⨯++"'︒⨯++4656.50803582.573944sin 5.126484.508026sina 5.21Y Y 3256.38961682.573944cos 5.124354.389607cosa 5.21X X i i ======左左左左 K50+200右偏12.5m 的坐标为:⎩⎨⎧"'︒⨯++"'︒⨯++5386.50803582.5739341sin 5.126484.508026sina 5.21Y Y 6482.38959882.5739341cos 5.124354.389607cosa 5.21X X i i ======右右右右 三、缓和曲线上任一点的坐标推算切线角:πβ︒⨯1802RL L s 2i i=缓和曲线上任意点i 的偏角:πβδ︒⨯180RL 6L 3s 2i ii ==缓和曲线ZH 或HZ 点到任意点i 的方位角为:i jd H Z jd ZH a a i δ±→→或=缓和曲线上任意点i 的坐标为:⎪⎪⎩⎪⎪⎨⎧-s 3ii 2s 25i i i 6RL L y L 40R L L x ==缓和曲线ZH 或HZ 点到任意点i 的弦长:22i yx C +=所以缓和曲线上任意点i 的坐标为:⎩⎨⎧++i i HZ ZH iii HZ ZH i sina C Y Y cosa C X X 或或==例题:已知一段缓和曲线,ZH 点到JD 方向方位角为A=183°17′08.9″,线路左偏43°31′02″,ZH 点里程为K52+001.615,ZH 点坐标x =388071.927,y =508789.089,R =960m ,Ls =120m ,求K52+100处的中点坐标及左右各偏12.5m 的坐标。
立体几何形心坐标计算公式
立体几何形心坐标计算公式在立体几何学中,我们经常需要计算各种形状的中心坐标,以便进行进一步的分析和计算。
本文将介绍一些常见立体几何形状的中心坐标计算公式,包括球体、圆柱体、锥体和多面体等。
1. 球体的中心坐标计算公式。
对于球体而言,其中心坐标即为球心的坐标。
设球心坐标为(a,b,c),则球体的中心坐标为(a,b,c)。
2. 圆柱体的中心坐标计算公式。
对于圆柱体而言,其中心坐标可以通过底面圆心和顶面圆心的坐标的平均值来计算。
设底面圆心坐标为(x1,y1,z1),顶面圆心坐标为(x2,y2,z2),则圆柱体的中心坐标为((x1+x2)/2,(y1+y2)/2,(z1+z2)/2)。
3. 锥体的中心坐标计算公式。
对于锥体而言,其中心坐标可以通过底面圆心和顶点的坐标的平均值来计算。
设底面圆心坐标为(x1,y1,z1),顶点坐标为(x2,y2,z2),则锥体的中心坐标为((x1+x2)/2,(y1+y2)/2,(z1+z2)/2)。
4. 多面体的中心坐标计算公式。
对于多面体而言,其中心坐标可以通过各个顶点坐标的平均值来计算。
设多面体的顶点坐标为(x1,y1,z1),(x2,y2,z2),...,(xn,yn,zn),则多面体的中心坐标为((x1+x2+...+xn)/n,(y1+y2+...+yn)/n,(z1+z2+...+zn)/n)。
需要注意的是,以上计算公式都是在笛卡尔坐标系下进行的。
如果需要在其他坐标系下进行计算,需要进行相应的坐标变换。
除了上述常见立体几何形状的中心坐标计算公式外,还有一些特殊形状的中心坐标计算公式,如椭球体、圆锥体等,其计算方法略有不同,需要根据具体形状进行推导和计算。
总之,立体几何形状的中心坐标计算公式是在立体几何学中非常重要的一部分,它可以帮助我们更好地理解和分析各种形状的性质,为进一步的计算和应用提供便利。
希望本文介绍的计算公式能够对读者有所帮助,也希望读者能够进一步深入研究立体几何学的相关知识,为科学研究和工程应用做出更大的贡献。
测量坐标转换公式推导过程

测量坐标转换公式推导过程一、二维坐标转换(平面坐标转换)(一)平移变换。
1. 原理。
- 设原坐标系O - XY中的一点P(x,y),将坐标系O - XY平移到新坐标系O' - X'Y',新坐标系原点O'在原坐标系中的坐标为(x_0,y_0)。
2. 公式推导。
- 对于点P在新坐标系中的坐标(x',y'),根据平移的几何关系,我们可以得到x = x'+x_0,y = y'+y_0,则x'=x - x_0,y'=y - y_0。
(二)旋转变换。
1. 原理。
- 设原坐标系O - XY绕原点O逆时针旋转θ角得到新坐标系O - X'Y'。
对于原坐标系中的点P(x,y),我们要找到它在新坐标系中的坐标(x',y')。
- 根据三角函数的定义,设OP = r,α是OP与X轴正方向的夹角,则x = rcosα,y = rsinα。
- 在新坐标系中,x'=rcos(α-θ),y'=rsin(α - θ)。
2. 公式推导。
- 根据两角差的三角函数公式cos(A - B)=cos Acos B+sin Asin B和sin(A -B)=sin Acos B-cos Asin B。
- 对于x'=rcos(α-θ)=r(cosαcosθ+sinαsinθ),因为x = rcosα,y = rsinα,所以x'=xcosθ + ysinθ。
- 对于y'=rsin(α-θ)=r(sinαcosθ-cosαsinθ),所以y'=-xsinθ + ycosθ。
(三)一般二维坐标转换(平移+旋转)1. 原理。
- 当既有平移又有旋转时,先进行旋转变换,再进行平移变换。
2. 公式推导。
- 设原坐标系O - XY中的点P(x,y),先将坐标系绕原点O逆时针旋转θ角得到中间坐标系O - X_1Y_1,根据旋转变换公式,P在O - X_1Y_1中的坐标(x_1,y_1)为x_1=xcosθ + ysinθ,y_1=-xsinθ + ycosθ。
旋转体的形心坐标公式

旋转体的形心坐标公式(实用版)目录1.旋转体的概念及性质2.形心坐标公式的定义3.形心坐标公式的推导过程4.形心坐标公式的应用实例正文一、旋转体的概念及性质旋转体是指由一个曲线绕着一个固定轴旋转形成的立体图形。
在数学中,我们通常研究旋转体的质心、形心等物理量的计算方法。
形心是指一个物体在受到外力作用时,物体各部分受到的力的矢量和的平衡点。
对于旋转体而言,形心坐标具有重要的物理意义和应用价值。
二、形心坐标公式的定义形心坐标公式是指描述一个旋转体形心位置的数学公式。
设一个旋转体由曲线 C 绕着 z 轴旋转生成,其形心坐标为 (x, y, z)。
根据定义,形心坐标满足以下条件:1.形心到旋转轴的距离等于形心到曲线 C 上任意一点的距离的平均值;2.形心坐标与曲线 C 上任意一点的连线垂直于旋转轴。
三、形心坐标公式的推导过程为了推导形心坐标公式,我们假设一个旋转体由曲线 C 绕着 z 轴旋转生成,曲线 C 的参数方程为:x = x(u, v)y = y(u, v)z = z(u, v)其中,(u, v) 是参数,x、y、z 是曲线 C 上任意一点的坐标。
设形心坐标为 (x", y", z"),我们需要求解 x"、y"和 z"关于参数 (u, v) 的表达式。
根据形心的定义,形心到旋转轴的距离等于形心到曲线 C 上任意一点的距离的平均值。
因此,我们可以建立如下方程:|x" * z"(u, v) - z(u, v)| / √(x"^2 + y"^2 + z"^2) = 1 / ∫∫|x * z(u, v) - z(u, v)| dudv其中,∫∫表示对参数 (u, v) 的二重积分。
为了进一步求解形心坐标,我们还需要引入一个辅助曲线 C_aux,使得 C_aux 与 C 在每个点处的切线平行。
设 C_aux 的参数方程为:x = x(u, v)y = y(u, v)z = c * z(u, v)其中,c 为待定常数。
心形函数数学直角坐标系表达式
心形函数数学直角坐标系表达式心形函数,又称为心形曲线,是一种常见的数学曲线,其形状类似于一个心形。
我们可以用数学的方式来描述这种美丽的形状。
心形函数在数学上使用直角坐标系来表示。
我们可以用一对方程来描述心形函数的形状。
假设$x$和$y$分别代表直角坐标系中的横轴和纵轴,那么一个常见的心形函数表达式是:$x = 16 \sin^3(t)$$y = 13 \cos(t) - 5 \cos(2t) - 2 \cos(3t) - \cos(4t)$在上述方程中,$t$表示参数,它的取值范围是$0$到$2\pi$。
通过改变参数$t$的值,我们可以使心形函数在直角坐标系中移动和旋转。
这个表达式描绘了一个完整的心形曲线。
为了更好地理解这个表达式,我们可以将其分解为几个部分进行分析。
首先,我们看到$x$轴的方程,$x = 16 \sin^3(t)$。
这部分方程使用正弦函数来定义$x$轴上的值。
正弦函数是周期性的,它在$0$到$2\pi$的范围内变化。
通过将正弦函数的最大值和最小值取绝对值,然后再进行立方运算,我们可以得到$x$轴上的值。
这部分方程使得心形函数在横轴方向上有一定的压缩和展开。
接着,我们看到$y$轴的方程,$y = 13 \cos(t) - 5 \cos(2t) - 2 \cos(3t) - \cos(4t)$。
这部分方程使用余弦函数来定义$y$轴上的值。
与正弦函数类似,余弦函数也是周期性的,它在$0$到$2\pi$的范围内变化。
通过将不同周期的余弦函数相加,我们可以得到$y$轴上的值。
这部分方程使得心形函数在纵轴方向上有一些波动和曲线。
综合$x$轴和$y$轴的方程,我们可以得到一个完整的心形曲线。
这个曲线是如此美丽和富有表现力,因此在数学上引起了人们的兴趣和研究。
除了直角坐标系的表达方式,心形函数还可以使用其他的数学表示方法。
例如,极坐标系可以给出一种不同的描述方式。
在极坐标系中,心形函数可以用一个方程来表示:$r = a(1 - \cos(t))$在这个方程中,$r$表示心形曲线上一点与极坐标系原点的距离,$a$是一个常数,决定了心形曲线的大小。
圆弧中心坐标(矢量)
圆弧中心坐标(矢量)
摘要:
1.圆弧中心坐标的定义与重要性
2.圆弧中心坐标的计算方法
3.圆弧中心坐标在实际应用中的例子
正文:
一、圆弧中心坐标的定义与重要性
圆弧中心坐标,又称圆心坐标,是指一个圆或圆弧的中心点在平面坐标系中的位置。
圆弧中心坐标通常用有序数对表示,例如(a,b)。
在数学、物理和工程领域中,圆弧中心坐标是一个重要的基本概念,它在解决许多问题时都发挥着关键作用。
二、圆弧中心坐标的计算方法
计算圆弧中心坐标的方法有多种,以下介绍两种常用的方法:
1.直接法:对于一个已知半径和圆心角的圆弧,其中心坐标可以直接通过以下公式计算:
圆心坐标= (圆心横坐标+ 半径× cos(圆心角), 圆心纵坐标+ 半径× sin(圆心角))
2.间接法:在实际问题中,有时无法直接获得圆的半径和圆心角,此时可以通过以下公式计算圆弧中心坐标:
圆心横坐标= (起点横坐标+ 终点横坐标) / 2
圆心纵坐标= (起点纵坐标+ 终点纵坐标) / 2
三、圆弧中心坐标在实际应用中的例子
圆弧中心坐标在实际应用中具有广泛的应用,以下是两个具体的例子:
1.计算机图形学:在计算机图形学中,为了绘制一个圆或圆弧,需要知道其圆心坐标。
通过计算圆心坐标,可以准确地绘制出所需的图形。
2.机械制造:在机械制造领域,为了加工一个圆形零件,需要知道其圆心坐标。
通过测量和计算圆心坐标,可以确保零件的加工精度和质量。
圆心坐标公式
圆心坐标公式
圆的一般方程是x²+y²+Dx+Ey+F=0(D²+E²-4F>0),其中圆心坐标公式(-D/2,-E/2)。
圆心坐标是圆的定位条件,半径是圆的定形条件。
圆心坐标公式推导
圆的一般方程是x²+y²+Dx+Ey+F=0,此方程可用于解决两圆的位置关系:
配方化为标准方程:(x+D/2)2+(y+E/2)2=(D²+E²-4F)/4,
其圆心坐标:(-D/2,-E/2),
半径为r=[√(D²+E²-4F)]/2,
此方程满足为圆的方程的条件是:D²+E²-4F>0。
若不满足,则不可表示为圆的方程。
圆的方程
x²+y²=1所表示的曲线是以O(0,0)为圆心,以1单位长度为半径的圆;
x²+y²=r²所表示的曲线是以O(0,0)为圆心,以r为半径的圆;
(x-a)²+(y-b)²=r²所表示的曲线是以O(a,b)为圆心,以r为半径的圆。
确定圆的方程主要方法是待定系数法,即列出关于a、b、r的方程组,求a、b、r,或直接求出圆心(a,b)和半径r,一般步骤为:根据题意,设所求的圆的标准方程(x-a)²+(y-b)²=r²;根据已知条件,建立关于a、b、r的方程组;解方程组,求出a、b、r的值,并把它们代入所设的方程中去,就得到所求圆的方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
弯心坐标的通式推导及其应用
[ 摘要] 针对开口薄壁截面梁的剪流和弯心坐标的复杂计算问题, 导出了简便计算公式。
对于由n 个小矩形组成的开口薄壁截面, 可以用图乘法计算弯心坐标, 避免了复杂的积分运算。
[ 关键词] 开口薄壁截面; 弯心坐标; 剪流; 静矩
当横向外力不作用于梁的纵向对称平面,而是非纵向对称平面的形心主惯性平面内时,要使得梁仍然只产生平面弯曲而不产生扭转变形,外力必须作用于特定的直线上。
由此,将梁在横向外力作用下,于两个形心主惯性平面内分别发生弯曲时,其横截面上两个剪力作用线的交点称为弯曲中心,简称弯心。
在工程上,如果横向外力作用线未通过弯心, 则容易因扭转变形造成失稳。
所以, 确定梁的弯心位置有着非常重要的工程意义。
在重庆大学出版社出版的《材料力学》(2011版)的第六章6.6节中,采用切应力流的概念推导了弯心,在随后的实际应用过程中,则主要套用了矩形截面梁上任一点的弯曲切应
力计算公式
*
z
z
=S
F S
bI 。
1.弯心坐标的通式推导
为了推导弯心坐标的通式, 采用书上推导弯心定义时的切应力流的概念,首先计算切应力流。