齿轮系及其设计讲义(新)
机械原理齿轮机构及其设计PPT

α
5、基圆 rb
s = e = p/2
6、齿顶高 ha
O
7、齿根高 hf
8、全齿高 h h = ha + hf
9、压力角 α
一、齿轮各部分名称
ακ
1、齿数 z
2、模数 m (非常主要旳概念) 以齿轮分度圆为计算各部分尺寸基准
齿数 z ×齿距 p = 分度圆周长 πd
分度圆直径d = z × p / π
一对齿轮作无侧隙啮合传动时,共存在四个基本原因:
两个几何原因,即一对共轭旳渐开线齿廓 给定其中任何三个原因, 两个运动原因,即两轮旳角速度 ω0 和ω 就能取得第四个原因
刀具齿廓拟定,强制刀具与轮坯以定传动比 i = ω0/ω运动
刀具旳齿廓(一种几何原因)就必然在轮坯上切削(包络)出轮 坯旳齿廓(另一种几何素)。
连续传动旳条件为:B1B2 ≥ Pb
可表达为:重叠度ε a = B1B2 / Pb≥ 1
ε a 分析:重叠度旳大小表白同步参加啮合轮齿啮合对数旳平均值
ε a = 1 时,一直只有一对轮齿啮合,确保最低连续传动; ε a < 1 时,齿轮传动部分时间不连续; ε a > 1 时,部分时间单齿啮合,部分时间双齿啮合。
pb
2
B1B2
B1P + PB2
ω2
ε = pb = πmcosα
ε=
1 (z1(tan α a1 – tanα ’) + z2(tan α a2 – tanα ’))
2π
由上式可知,重叠度 ε 与齿数 z 正有关,z 越大ε 越高;
啮合角 α’ 越大,重叠度 ε 越小。与模数m无关。
四、原则中心距 a 与实际中心距 a’
第八讲 齿轮系及其设计
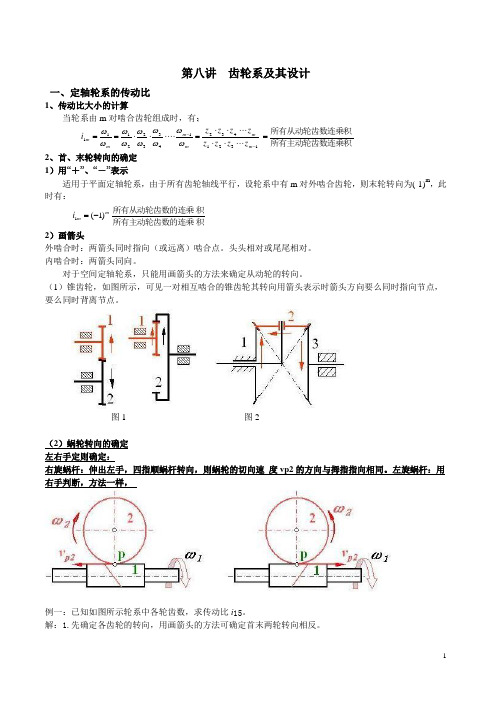
第八讲 齿轮系及其设计一、定轴轮系的传动比1、传动比大小的计算当轮系由m 对啮合齿轮组成时,有:1321432143322111--⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅=⋅⋅⋅⋅⋅⋅==m m m m m m z z z z z z z z i ωωωωωωωωωω所有主动轮齿数连乘积所有从动轮齿数连乘积=2、首、末轮转向的确定1)用“+”、“-”表示适用于平面定轴轮系,由于所有齿轮轴线平行,设轮系中有m 对外啮合齿轮,则末轮转向为(-1)m,此时有:积所有主动轮齿数的连乘积所有从动轮齿数的连乘mm i )1(1-=2)画箭头外啮合时:两箭头同时指向(或远离)啮合点。
头头相对或尾尾相对。
内啮合时:两箭头同向。
对于空间定轴轮系,只能用画箭头的方法来确定从动轮的转向。
(1)锥齿轮,如图所示,可见一对相互啮合的锥齿轮其转向用箭头表示时箭头方向要么同时指向节点,要么同时背离节点。
图1 图2(2)蜗轮转向的确定 左右手定则确定:右旋蜗杆:伸出左手,四指顺蜗杆转向,则蜗轮的切向速 度vp2的方向与拇指指向相同。
左旋蜗杆:用右手判断,方法一样,例一:已知如图所示轮系中各轮齿数,求传动比i 15。
解:1.先确定各齿轮的转向,用画箭头的方法可确定首末两轮转向相反。
2. 计算传动比'4'31543'4'32154325115Z Z Z Z Z Z Z Z Z Z Z Z Z Z i -=-==ω其中齿轮2对传动比没有影响,但能改变从动轮的转向,称其为过轮或中介轮。
图二、 周转轮系的传动比周转轮系的分类除按自由度以外,还可根据其基本构件的不同来加以分类,如图所示,设轮系中的太阳轮以K 表示,系杆以H 表示,则图6所示为2K —H 型轮系;图7为3K 型轮系,因其基本构件为3个中心轮,而系杆只起支撑行星轮的作用。
在实际机构中常用2K —H 型轮系。
图5 图7反转原理:给周转轮系施以附加的公共转动-H ω后,不改变轮系中各构件之间的相对运动, 但原轮系将转化成为一新的定轴轮系,可按定轴轮系的公式计算该新轮系的传动比。
齿轮系及其设计new

投影方向
一对内啮合圆柱齿轮传动两轮的转向相同
17
一对圆锥齿轮的转向
一对圆锥齿轮传动,箭 头同时指向啮合点或背 离啮合点
18
蜗杆蜗轮传动的转向
蜗杆蜗轮的回转方向与蜗杆旋向有关
19
如何判断蜗杆、蜗轮的转向?
右旋蜗杆
左旋蜗杆
右 以右手握住右旋蜗杆,四指 左 以左手握住左旋蜗杆,四指 手 指向蜗杆的转向,则拇指的 手 指向蜗杆的转向,则拇指的
定 指向的反向为啮合点处蜗轮 定 指向的反向为啮合点处蜗轮
则 的线速度方向。
则 的线速度方向。 20
综合举例
2 2'
1
3
4
3
5
3'
n5
2
4'
n1
2'
1
21
二、周转轮系的传动比
给整个轮系加上与系杆速度大小相等方向相反的速度, 则系杆不再转动,同时其他构件速度相应改变。 将周转轮系转化为定轴轮系, 称作反转法(转化机构法)。
22
周转轮系传动比的计算方法(转化机构法) 周转轮系 反转法
定轴轮系(转化机构)
定轴轮系传动比计算公式
求解周转轮系的传动比
23
周转轮系
ωH
定轴轮系
➢ 给整个周转轮系加一个与系杆H的角 速度大小相等、方向相反的公共角速
度ωH
原周转轮系中 转化机构中各 构件名称 各构件的角速度 构件的角速度
系杆H
H
中心轮1
1
H H
H
H
0
1H 1 H
行星轮2
2
中心轮3
3
H 2
2
H
H 33H来自在转化机构中系杆H变成了机架
第五章 齿轮系及其设计-1.jsp——【湖南大学 机械原理 内部讲义】
例题1:计算轮系的传动比,确定n5的转向。
4
3
5
3'
n5
2
4'
n1
2'
1
n5的转向如图所示。
传动比大小i = ω1/ω5
所有从轮齿数的连乘积 =
所有主轮齿数的连乘积
i15
z2 z3 z4 z5 z1 z2 z3 z4
转向只能用箭头表示。
例2 :图示轮系中,已知蜗杆1的转速n1= 900 r/min(顺时针), Z1=2,Z2=60, Z2‘= 20,Z3= 24, Z3’= 20,Z4=24,Z4‘= 30,
900 243
3.71r
/
min
n2
2
n3
n2′ 3′n3n′424′5
5′
n6
n6 的方向 用画箭头的方法
确定。
3
n5
n5′
4′
n4′
如图所示(向下)
第五章 轮 系
问题:
12小时
时针:1圈 分针:12圈 秒针:720圈
i = 12 i = 60
i = 720
第五章 轮 系
问题:大传动比传动
问题:变速、换向
§5—1 轮系的分类 (Type of Gear Train)
由一系列 的齿轮所组成 的齿轮传动系 统称为齿轮系, 简称轮系。
§5—1 轮系的分类
2、首、末轮的转向
1 外啮 合
2
内啮
1
合
2
§5—2 定轴轮系传动比计算
1
锥
齿
2
轮
1—右旋
1—左旋
2
2
蜗轮蜗杆
§5—2 定轴轮系传动比计算
第十一章 齿轮系及其的设计-PPT文档资料
i1 m
Z2 Z’3
所有从动轮齿数的乘积 1 = m 所有主动轮齿数的乘积
1 i i i i i 15 12 23 3 '4 4 '5 5
Z4
z2 z3 z4 z5 z1 z2 z3' z4'
Z1
Z’4
Z3
Z5
二、首、末轮转向的确定
1)用“+” “-”表示 适用于平面定轴轮系(轴线平行)。 外啮合:转向相反, “-” ; 内啮合:转向相同,“+” 。 设轮系中有m对外啮合齿轮, 则末轮转向为(-1)m
结论:
1、定轴轮系的传动比等于组成该轮系的各对啮合齿轮传动比的连乘积; 2、其大小等于各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿 数的连乘积之比。即
从 m n 所有从动轮齿数的连乘 积 m im n 从 m n 所有主动轮齿数的连乘 积 n
3、惰轮(如轮4)不影响传动比大小,只改变传动比方向。
实例:
§11-1
轮系的类型
轮系分类
平面定轴轮系 定轴轮系(轴线固定) 空间定轴轮系 差动轮系(F=2) 周转轮系 行星轮系 复合轮系
本章要解决的问题: 1.轮系传动比 i 的计算; 2.从动轮转向的判断。
周转轮系: 在运转过程中至少有一个齿轮几何 轴线的位置并不固定,而是绕着其 它定轴齿轮轴线回转的轮系。
行星轮系:
若将中心轮3(或1)固定,则整个轮系的自由度 为1,称为行星轮系。
F=33-23-2=1
差动轮系: 若三个基本构件都可动,则整个轮系的自由度为2,称
为差动轮系。
F=34-24-2=2
周转轮系按所含的基本构件分:
2K-H型 (两个中心轮和一个系杆)
第11章齿轮系及其设计1素材PPT课件
ni=(ωi/2 π)60
=ωi
30 π
rpm
用转速表示有:
i
H mn
n
H m
n
H n
nm nH nn nH
= f(z)
.
11
东莞理工学院专用
例二 2K-H 轮系中, z1=10, z2=20, z3=50
轮3固定, 求i1H 。
解 1)
i1H3
1H 3H
1 H 3 H
1 H 0 H
H 1
H 3
1 H 3 H
z2z3 z3
z1z2
z1
上式“-”说明在转化轮系中ωH1 与ωH3 方向相反。
通用表达式:
右边各轮的齿数为已知,左边三个基本构件的参数2中,如果
i mHn
H m
H n
m H n H
已知其中任意两个,则可求得第三个参数。于是,可求得任
意两个构件之间的传动比。
第十一章 齿轮系及其设计 内容提要
§11-1 齿轮系及其分类
§11-2 定轴轮系的传动比 §11-3 周转轮系的传动比
§11-4 复合轮系的传动比
§11-5 轮系的功用
§11-6 行星轮系 设计的基本知识
§11-8 其他轮系简介
.
1
东莞理工学院专用
§11-1 轮系的类型
一、传动比大小的计算
一对齿轮: i12 =ω1 /ω2 =z2 /z1
可直接得出
对于齿轮系,设输入轴的角速度为ω1,输出轴的角 速度为ωm ,中间第i 轴的角速度为ωi ,按定义有:
i1m=ω1 /ωm
强调下标记法
当i1m>1时为减速, i1m<1时为增速。
i1 m
第8章齿轮系及其设计
1)定轴轮系
2)周转轮系
定轴轮系.exe
第8章齿轮系及其设计
周转轮系.exe
在周转轮系中,根据其自由度的不同,它又可分成 两类:
(1)差动轮系: 自由度为2的周转轮系称为差动轮系。 在这种轮系中应有两个原动件,才能确定其他各构件的
运动。
F 3n 2PL PH 3 4 2 4 2 2
(2)行星轮系: 自由度为1的周转轮系称为行星轮系。 在这种轮系中,其中有一个中心轮1或3是固定不动的。
F 3n 2PL PH 33 23 2 1
第8章齿轮系及其设计
在周转轮系中,根据中心轮个数的不同,它又可分 成两类:
(1)2K-H型:它是由两个中心轮(2K)和—个系杆 (H)组成。
(2)3K型 :它是由三个中心轮(3K)和一个系杆组 成,此时系杆H不起传力作用,仅起支承作用,故在轮 系的型号中不含“H”。
n5的结果为负值,说明齿轮5与齿轮1转向相反,如图所示。
例2:已知图示轮系中各齿
轮的齿数,求传动比 i15 。
解:1. 分析:由图可知,该轮 系属于空间定轴轮系,但由于 首末两轮的轴线平行,其传动 比要用正负号表示,用画箭头 的方法可确定齿轮1、5 转向 及传动比的符号。
Z2 Z’3
Z1 作者:潘存云教授
但首末两齿轮的转向不能用
来(1确) m 定,只能用画箭头的方法
在图中标出。但在空间定轴轮系中若首末两轮的轴线平行,则
其传动比仍然要用正负号表示。
须注意的是,在该图所示的轮
系中,齿轮4的齿数不影响该轮系传
动比的大小,但能改变其他齿轮的
转向,这种齿轮称为惰轮第8(章齿或轮系过及轮其设、计 中介轮)。
例1 在下图的轮系中,已知各齿轮的齿数为z1=20,z2=30,z2’=25, z3=60,z3’=25,z4=25,z5=35,轮1的转速n1=1260r/min(转向如 图)。试求(1)该轮系传动比i15;(2)轮5的转速 n5,并确定 轮5的转向。
机械原理(第七版)优秀课件—第十章 齿轮机构及其设计

Gears and its Design
• 10.1 齿轮机构的特点及分类
• 10.1.1 概述 • 1.什么是齿轮?
• 2.特点:适应范围广(v、p、r);效率
高(0.99);速比稳定、传动精度高;工 作可靠;可实现任意轴间的传动。制造 和安装精度要求高,成本较高;不适于 远距离传动。
• 刀具不标准
2.变位齿轮问题的提出
1)z<zmin时又要不根切; 2)a’≠a;
3)ρ小<ρ大, σ小>σ大, u小>u大,
• 3.刀具的变位 1)正变位 2)负变位 • 4. 变位传动
1)零变位齿轮传动:∑x=0,α’=α, a’=a • x1=x2=0 标准齿轮传动 x1=-x2 等移距变位齿轮传动 • 2)非零变位齿轮传动:∑x≠0,α’≠α, a’≠a
曲齿
交错轴斜齿轮传动
• 3.按齿廓曲线分:渐开线、摆线、圆弧 • 4.按工作条件分: • 1)开式:2)闭式:
• 5.按运动速度分:
• 低速:<1m/s
• 中速:1~25
• 高速:>25m/s • 超高:>100m/s
• 10.1.3 对齿轮传动的基本要求
– 1.传动准确平稳
i 1 d1
2 d 2
α
r
α N1
xm ha m
p
Q
• 2. 变位齿轮的几何计算
• m、a由强度计算确定,α、z、d、db不变化 • h高a和、齿h厚f 、的d变a化、 df、s 、e 、α’都将变化,而关键是齿
• 1)齿顶高、齿根高
hai (ha* xi y)m
hfi (ha* c* xi)m
x的选择:无侧隙、不根
2
c os '
第十一章齿轮系及其设计
第十一章齿轮系及其设计一、教学目标及基本要求1. 了解各类轮系的组成和运动特点,学会判断一个已知轮系属于何种轮系。
2. 熟练掌握各种轮系传动比的计算方法,会确定主、从动轮的转向关系;掌握周转轮系的传动特性与类型和结构的关系。
3. 了解各类轮系的功能,学会根据各种要求正确选择轮系类型。
4. 了解行星轮系效率的概念及其主要影响因素。
5. 了解复合轮系的组合方法,学会分析复合轮系的组成,正确计算其传动比。
6. 了解行星轮系设计的几个基本问题;了解几种其它类型行星传动的原理及特点。
二、教学内容1.轮系的分类2.定轴轮系及其设计3.周转轮系及其设计4.复合轮系及其设计5.少齿差传动简介三、教学内容的重点和难点重点:1. 轮系传动比的计算。
2. 轮系的设计。
难点:复合轮系传动比计算四、教学内容的深化与拓宽新型少齿差传动五、教学方式与手段及教学过程中应注意的问题充分利用多媒体教学手段,围绕教学基本要求进行教学。
在教学过程中应注意强调应用反转法原理求解周转轮系传动比方法的实质、转化机构的概念、正确划分基本轮系的方法。
要注意突出重点,多采用启发式教学以及教师和学生的互动。
六、主要参考书目1 黄茂林,秦伟主编.机械原理.北京:机械工业出版社,20022 申永胜主编.机械原理教程.北京:清华大学出版社,19993 曲继方,安子军,曲志刚.机构创新设计.北京:科学出版社,2001七、相关的实践性环节参观机械创新设计实验室。
八、课外学习要求自学定轴轮系的传动效率计算、定轴轮系设计中的几个问题、封闭型轮系的功率流等内容。
九、习题11-1,11-2,11-5,11-13。