麦弗逊式前悬架下摆臂结构CAE分析
麦弗逊式悬架的分析与优化思考

范 围 ,已经 成 为 麦 弗 逊 式 悬 架 设 计 工 作 中值 得 关 注 的 关 键 性 的契 合 程 度 与 使 用性 能 ” 。
技 术 。
为 了更 好 地 提 升 麦弗 逊 式 悬 架 的结 构 性 能 ,设 计 人 员 在 实
2 三 维数 模 的建 立
践 中应 结 合 三 维 数模 对 麦 弗逊 式 悬 架 进 行 充 分 的结 构 调 整 ,利
采用传统的几何作 图技术对 麦弗逊 式悬架设 计过 程 中容 用 Insight模块 ,以主销 内倾 角和轮胎 滑移量作为 目标 函数 ,使
易出现 的复杂问题 进行求解 。麦 弗逊式 悬架 所 对应 的车轮跳 下控制臂后支点 、下控制臂前支点 、转 向横拉杆外支点 、下控制
动位 置的各个定位参数都是相互 变化的 ,随着我 国计算 机技术 臂外支点等硬点坐标作为设计 过程 中的主要优化 与改进部 位。
出现设计不 当的情况 ,就会极 大地影 响轿车 的使用性 能 ,致使
通过对麦弗逊式悬架三维数模的实际情况进行研究可知 ,
轿车出现转 向摆振 、沉重 的问题 。在 一般情 况下 ,麦弗逊 式悬 在 麦 弗 逊 式 悬架 的 优 化 与改 进 过 程 中 ,设 计 人 员 需 要 重 点 关 注
优质化的悬架形式 ,结 构简单 、布局 紧凑 、性能 突出 、占用 空间 三维数模 的过程 中,根据麦弗逊式悬架 内部结构之 间的相 互连
较少 ,在实践环节 能够充分提升机械单位 的运动性 能。本文通 接与运动关 系 ,实现不同结构的优化与创新 。
过对麦弗逊式悬架 的实 践应用情况进行分析 ,结合麦弗逊式 悬
架都 是与悬架 系统进行相互连接 ,两者在运动过程 中难免 出现 容易引发零部件磨损 与结构设 计误差 的 问题 。在计算机 网络
典型麦弗逊式前悬架结构以及双叉式后悬架结构

下图为典型麦弗逊式前悬架结构以及双叉式后悬架结构双叉臂式悬架通常采用上下不等长叉臂(上短下长),让车轮在上下运动时能自动改变外倾角并减小轮距变化、减小轮胎磨损,并且能自适应路面,轮胎接地面积大,贴地性好。
上下控制臂能分担横向力,令车身在过弯时更加平稳。
能承受住越野时崎岖路面对底盘的强大冲击但更占用空间,结构复杂成本高,不适合经济型小车双叉臂式独立悬架拥有出色的侧向支撑、精确的车轮方向控制,但由于使用上下控制臂结构,过于稳定的特性却使车轮的响应速度较其他形式悬架要缓慢,上下控制臂的结构也导致这种悬架的横向安装空间大。
上叉臂式悬架常出现在车身宽大的豪华轿车、全尺寸SUV、皮卡甚至超级跑车,如凯迪拉克赛威SLS、雪铁龙C6、奥迪Q7、大众途锐,甚至国产中兴威虎皮卡,以及兰博基尼盖拉多、玛莎拉蒂3000GT等注重操控性能的跑车。
在这个言必谈操控、论必说运动的年代里,几乎所有汽车品牌多在大力的宣传自己产品优秀的操控性能,从欧系的宝马、奥迪、萨伯到日系的讴歌、英菲尼迪等高端品牌无不在极力宣传自己良好的操控性和运动性,就连一向以舒适性能为取向的奔驰、凯迪拉克、雷克萨斯等高端品牌也在新近的设计中加入了更多的运动取向。
从以福克斯为代表的紧凑型轿车到以迈腾为代表的中级车到以宝马5系Li为代表的高档车无不标榜自己的运动性能。
那么他们是否如宣传所说这么优秀,此次汽车探索就为大家解读影响汽车运动性能的汽车底盘的核心——悬挂系统,并分析不同悬挂对汽车操控性及舒适性的影响。
『悬挂在汽车底盘安放位置的示意图』●悬挂的概念和分类首先让我们来了解一下什么是悬挂:悬挂是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,悬架的主要作用是传递作用在车轮和车身之间的一切力和力矩,比如支撑力、制动力和驱动力等,并且缓和由不平路面传给车身的冲击载荷、衰减由此引起的振动、保证乘员的舒适性、减小货物和车辆本身的动载荷。
典型的汽车悬挂结构由弹性元件、减震器以及导向机构等组成,这三部分分别起缓冲,减振和力的传递作用。
基于ADAMS的某乘用车前悬架K C性能分析与优化

基于ADAMS的某乘用车前悬架K C性能分析与优化第一章:绪论车辆悬架系统是汽车的重要组成部分之一,其主要功能是承受并缓解来自路面所产生的振动和冲击力,保障了行车的平稳性和舒适性。
而前悬架的重要性更甚,它直接影响着车辆的操控性能和行驶安全性。
因此,对于前悬架系统的研究和优化一直是汽车工业研究的热点和难点之一。
随着ADAMS仿真技术的发展和应用,有效地提高了对前悬架K C性能的模拟和分析能力,为系统的优化提供了可靠的技术支持。
本文将基于ADAMS仿真软件平台,针对某乘用车前悬架K C性能进行分析与优化,提高该车辆的操控性能和安全性。
第二章:某乘用车前悬架系统的结构和工作原理分析本章主要介绍某乘用车前悬架系统的结构和工作原理。
该车的前悬架系统采用麦弗逊式悬架,其特点是结构简单,重量轻,可靠性高。
该悬架系统主要由下控制臂、上控制臂、悬架弹簧、减振器、防护板以及连接各组件的螺栓等构成。
在行驶过程中,前轮的垂直位移通过弹簧和减振器的共同作用被转化为车身的纵向运动,从而实现了车辆的平稳行驶。
第三章:基于ADAMS的某乘用车前悬架系统建模和运动仿真本章主要介绍基于ADAMS的某乘用车前悬架系统建模和运动仿真方法。
采用ADAMS软件建立某乘用车前悬架系统的三维模型,进而进行前悬架K C性能的仿真分析。
通过建立系统的运动学和动力学模型,可得出任意时刻前悬架系统中各组件的位置、速度、加速度和力学反应等参数。
基于此,对前悬架系统的悬架弹簧刚度和减振器阻尼系数等重要参数进行优化,从而实现对前悬架K C性能的优化。
第四章:某乘用车前悬架系统K C性能分析与优化本章主要介绍某乘用车前悬架系统K C性能的分析和优化。
通过ADAMS仿真软件进行前悬架系统K C性能的模拟计算、绘制不同载荷情况下前悬架系统的运动学曲线和车辆的滚动刚度曲线,进而通过对比数据分析,确定前悬架系统的弹簧刚度、减振器阻尼系数以及上下控制臂参数等优化方案。
麦弗逊悬架运动仿真分析
麦弗逊悬架运动仿真分析摘要一种三维模型提出了一个麦克弗森型转向悬架的运动行为。
通常的方法提出了主要参数的确定(主销后倾角,车轮外倾角,转向角等),在系统的操作因素的作用中,(这些参数)影响车辆的操纵。
输入数据一方面是悬架和转向几何,另一方面是支柱的移动和转向轮转向的转向,这是通过监测车辆而获得的。
该模型已被施加到一个标准的车辆,其结果的有效性已被证实。
关键词:计算机模拟;汽车悬架;麦弗森;三维运动模型。
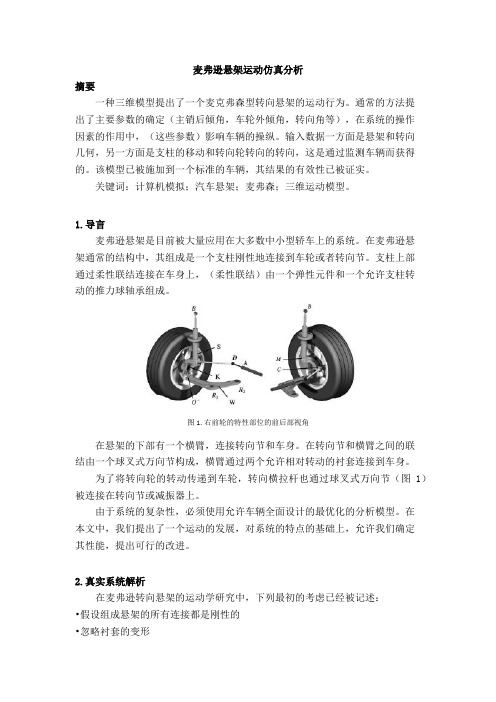
1.导言麦弗逊悬架是目前被大量应用在大多数中小型轿车上的系统。
在麦弗逊悬架通常的结构中,其组成是一个支柱刚性地连接到车轮或者转向节。
支柱上部通过柔性联结连接在车身上,(柔性联结)由一个弹性元件和一个允许支柱转动的推力球轴承组成。
图1.右前轮的特性部位的前后部视角在悬架的下部有一个横臂,连接转向节和车身。
在转向节和横臂之间的联结由一个球叉式万向节构成,横臂通过两个允许相对转动的衬套连接到车身。
为了将转向轮的转动传递到车轮,转向横拉杆也通过球叉式万向节(图1)被连接在转向节或减振器上。
由于系统的复杂性,必须使用允许车辆全面设计的最优化的分析模型。
在本文中,我们提出了一个运动的发展,对系统的特点的基础上,允许我们确定其性能,提出可行的改进。
2.真实系统解析在麦弗逊转向悬架的运动学研究中,下列最初的考虑已经被记述:•假设组成悬架的所有连接都是刚性的•忽略衬套的变形•车轮的有效半径由轮胎的动态特性决定对与路面车轮相对应的系统的运动学分析揭示了总共7个元素:车身,横臂,转向节,减振器活塞杆,横拉杆,转向齿条,车轮。
这些元素的运动学连接在表1中被给出。
机构中的自由度(dof)通过Kutzbach准则计算,表达式为:dof=6×﹙7×车身-1﹚-4×﹙球叉式万向节﹚×3﹣2﹙﹚×5﹣1×﹙平动﹚×5-1×﹙圆柱﹚×4=5 (1) 在五个自由度中,仅有两个反映了车轮的运动:转向齿条的位置和支柱的平动。
某乘用车前悬摆臂多工况道路载荷谱采集技术研究报告

产品可靠性分析报告某乘用车前悬摆臂多工况道路载荷谱采集技术研究报告本刊智库专家团专家徐磊编者按:本文以某乘用车麦弗逊式前悬摆臂为研究对象,采集整车在汽车试验场强化道路各工况的应变,通过台架标定的方法获得摆臂载荷与应变关系,计算出相应工况下摆臂所受载荷。
通过分析载荷谱时域和频域,得到利于零部件设计的参数,同时为结构设计人员进行C A E分析提供数据支持,为零部件疲劳寿命试验提供试验条件。
麦弗逊式独立悬挂概况麦弗逊式独立悬挂是最为常见的一种悬挂,多应用于家用轿车的前悬挂。
如图1所示,麦弗逊式独立悬挂主要有摆臂和减振机构组成。
其中摆臂发挥着重要作用,用于约束转向节在侧向(y)的位移,在纵向(x)的位移。
摆臂如有质量问题,会导致车辆失控,会带来致命安全事故。
所以采集整车满载情况下,在汽车试验场强化耐久道路中各工况的载荷谱显得尤为重要。
结构设计人员可以利用该载荷谱对摆臂、前副车架和转向节进行CAE分析。
通过计算机仿真技术用载荷谱模拟和加载,预测寿命和反馈优化。
这可以把试验时间压缩到原来的十分之一、百分之一,大大降低开发成本,缩短开发周期。
在产品开发验证阶段,通过制定载荷谱试验规范,按照规范要求的载荷谱对摆臂、前副车架和转向节施加载荷。
与传统的等幅谱加载相比,使用载荷谱加载可以更加真实地反映上述零部件在用户道路中的疲劳寿命。
产品可靠性报告2020年第10期151,品质汽车专刊1、摆臂受力分析及应变采集原理如图2所示,摆臂通过两个衬套与副车架相连,通过一个球头销 与转向节相连,共三个连接点。
对于摆臂而言套与副车架相连的两 个点为固定约束点。
外来载荷通过与转向节相连的球头销传递给摆 臂纵向力Fx,侧向力Fy,垂向力FzD 由于摆臂受到的垂向力被摆臂 上面的两个衬套较大程度地释放,导致摆臂在垂向上的疲劳损伤非 常小,因此对摆臂的载荷谱采集只选择采集与转向节相连的球头销 受到的纵向力Fx 和侧向力Fy 。
如图3所示,贴片位置选择在球头销的 X 和Y 方向。
麦弗逊独立悬架的运动分析和结构设计开题报告

论文开题报告论文题目:麦弗逊独立悬架的运动分析和结构设计一、立论依据1、研究意义最近这几年,中国汽车产销不断上升,自2002 年之后,中国汽车行业开始进入爆发式增长阶段,特别是随着私人消费的兴起,轿车需求量开始迅速攀升,并成为推动中国汽车发展的一股重要力量。
与此同时,中国在全球汽车产业中的地位也逐渐上升。
2007 年,中国汽车需求总量为879 万辆,在全球市场占比从2001 年 4.3%上升到2007 年的12.2%。
2009年首次超越美国成为全球第一大汽车产销国后,2010 年中国再次稳坐全球销量第一的位置。
全年销量超过1800 万辆。
目前中国汽车市场自主品牌发展态势良好。
自主品牌乘用车的销售量也是十分可观的。
之所以自主品牌的销量不断上升,跟中国汽车品牌在乘用车领域技术不断学习进步不无关系。
中国汽车工业这些年逐步建立起有竞争性、不同技术层次的零部件配套体系。
并积极开展节能、环保型的汽车研发,推动技术进步,加快汽车产品的结构升级。
坚持对外开放和自主发展相结合的原则,努力提高自主研发能力,培育自主品牌产品。
为了实现由“汽车大国”向“汽车强国”转变,一方面,国家通过宏观调控、政策扶持等措施,鼓励和支持汽车产业的转型升级;另一方面,企业在国家政策的引导下,在组织结构、产品结构、技术结构、市场结构等方面积极实施转型升级战略,全面、有效提升汽车产业的国际竞争力。
汽车强国就必须要具有完全白主知识产权的汽车。
一辆具有自主知识产权的汽车,并不是那么容易就能制造出来的。
虽然目前中国已经有许多自主品牌的汽车,不但在国内销量不错,而且有个别车型能够出口。
然而,其实很多自主品牌的汽车,内部零部件或多或少也都不是中国自己的技术,没有自主知识产权,虽然从整车角度看,是中国的自主品牌,其实不然。
零部件是组成一辆汽车的基木,而在零部件制造生产上具有自主知识产权,才能使中国的自主品牌汽车真正畅销巾场,经久不衰。
2、悬架概述汽车悬架是汽车一个非常重要的部件。
麦弗逊式独立悬架结构研究

麦弗逊式独立悬架结构研究在麦弗逊式悬架中,为保证系统的受力更加合理,并满足使用寿命的要求,在布置上采用主销中心线,减震器中心线以及弹簧中心线不共线的形式。
一般的,在其它悬架系统结构中,对应于车轮不同的跳动位置,各点至主销中心的距离保持不变。
而在三线不共线的麦弗逊悬架系统中,对应于车轮不同的跳动位置,各点至主销中心的距离是变化的。
图2是麦弗逊式独立悬架的空间结构[3]。
图2 麦弗逊式独立悬架结构简图1-横摆臂 2-车轮 3-转向节 4-减震器 5-弹簧 6-车身减震器4的上端用螺栓和橡胶垫圈与车身相连接,减震器下端固定在转向节3上,而转向节通过球铰链与横摆臂1连接。
车轮所受到的侧向力通过转向节大部分由横摆臂承受,其余部分由减震器承受。
因此,这种结构形式较其他悬架在一定程度上减少了滑动摩擦。
螺旋弹簧5套在筒式减震器的外面,主销的轴线通过上下铰链中心,当车轮上下跳动时,因减震器的下支点随横摆臂的摆动而摆动,故主销轴线的角度是变化的。
这说明车轮是沿着摆动的主销轴线而运动。
因此,这种悬架在变形时,使得主销的定位角和轮距都有些变化。
如果适当调整杆系的结构布置,可以使车轮的这些定位参数变化降低到很小。
该悬架的突出优点是增大了两轮内侧的空间,便于发动机和其他一些部件的布置。
图3为麦弗逊式悬架的结构示意图[3],其中BD为主销的中心线,MN为下控制臂旋转轴线,DH 为减震器中心线,P点为转向节臂球头中心,F为车轮的中心,Q点为主销的中心线与车轮轴线的在后视图上的交点,O点为B的回转中心,G为车轮的着地点。
坐标系x-y-z为静坐标系。
图3 麦弗逊式悬架机构图以下用空间机构知识分析麦弗逊悬架机构。
由于麦弗逊悬架是各个零件组成,在悬架机构分析中采用空间机构分析。
机构都是由构件组成的。
构件不同于零件,前者是机构运动学的概念,而后者是机械设计学和机械制造理论的概念一个构件可以是一个零件,也可以是由几个甚至很多零件组成。
在机构学中一般认为构件是刚性,弹性和弹性体不是为构件。
麦弗逊悬架仿真分析
麦弗逊悬架仿真分析一、本文概述随着汽车工业的飞速发展和消费者对车辆性能要求的不断提高,悬架系统作为车辆的重要组成部分,其设计优化和性能分析显得尤为关键。
麦弗逊悬架作为一种常见的独立前悬架类型,以其结构简单、紧凑且性能稳定的特点,被广泛应用于各类乘用车中。
本文旨在通过仿真分析的方法,对麦弗逊悬架的动态特性进行深入探讨,以期为悬架设计优化和车辆性能提升提供理论支持和实践指导。
本文首先将对麦弗逊悬架的基本原理和结构特点进行简要介绍,为后续分析奠定理论基础。
随后,将详细介绍仿真分析的方法论,包括模型的建立、边界条件的设定、仿真工况的选择等,以确保分析结果的准确性和可靠性。
在此基础上,本文将重点分析麦弗逊悬架在不同工况下的动态响应特性,如位移、速度、加速度等关键参数的变化规律,并探讨其对车辆操纵稳定性和乘坐舒适性的影响。
本文将对仿真结果进行总结,并提出针对性的优化建议,以期为麦弗逊悬架的设计改进和车辆性能的提升提供有益的参考。
通过本文的研究,不仅可以加深对麦弗逊悬架动态特性的理解,还可以为车辆悬架系统的优化设计和性能评估提供科学的方法和依据。
本文的研究方法和成果也可为其他类型悬架系统的仿真分析提供参考和借鉴。
二、麦弗逊悬架结构与工作原理麦弗逊悬架(McPherson Strut Suspension)是汽车工业中应用最为广泛的一种独立悬架形式。
其名称来源于其发明者,英国工程师约翰·麦弗逊(John Alexander McPherson)。
麦弗逊悬架以其结构紧凑、成本低廉、性能稳定等优点,在乘用车市场中占据了主导地位。
麦弗逊悬架主要由减震器、螺旋弹簧、下摆臂、转向节、轴承等部件组成。
减震器与螺旋弹簧组合在一起,构成了悬架的支柱,既起到了支撑车身的作用,又能够吸收路面冲击产生的振动。
下摆臂则连接车轮与车身,通过轴承与转向节相连,使得车轮可以相对于车身进行转向运动。
当车辆行驶在不平坦的路面上时,路面的起伏会引起车轮的上下跳动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国农业大学
硕士学位论文
麦弗逊式前悬架下摆臂结构CAE分析
姓名:王婷婷
申请学位级别:硕士
专业:车辆工程
指导教师:张红
20070501
田3-2壹弗逊式莆悬槊下摆臂的三维模型图
3.2.2UG模型导入ANSYS软件的方法研究
可以通过IGES文件将UG模型导入ANSYS,导入ANSYS后的下摆臂模型如图3.3所示.用此方法导入后的模型只保留了隶属于体的关键点、线和面,在ANSYS中无法自动创建体p7I.因此,该文件导入的模型在ANSYS中还要通过一系列的拉伸、旋转成体后,才可进行体的网格剖分.这对于复杂模型来说,费时费力,没能很好发挥UG的建模优势.
田3-3IGES文件导入ANSYS后的下摆臂模型
也可以通过ANSYSGUI或~UGIN命令直接将UG模型导入ANSYS.由于UG与ANSYS之间无法实现无缝接口,模型仅以线结构显示体模型,如图3.4所示.
可以通过改变ANSYS的界面设置,实现体模型的一般显示.在UtilityMenu--,PlotCtrls--,StyIe--,SolidModelFac,ets中,将线结构显示更改为标准模型显示,然后在UtilityMenu--·Plot中选择replot,才能进行体分割,否则系统因模型存在病态拓扑而对分割命令不作响应·
中国农业大学硕士学位论文第3章前悬架模型的CAE分析
圈34直接导入ANSYS的下摆臂攮型
对于复杂的模型来说,直接导入比通过IGES文件间接导入实现体的转换简便得多,并且无需修改模型,因此,建议将UG模型直接导入ANSYS中.
由于下摆臂模型中存在槽、孔(内环面)、倒角、倒圆等一系列细长面域,模型直接导入ANSYS后会引起网格剖分失败.如果在ANSYS中对细长面域进行合并、删除、分割等操作,过程比较繁琐.所以,在不影响分析结果的前提下,可在UG中对模型进行必要的简化.将下摆臂工字形断面简化为近似等形的矩形断面,保证在受到同等载荷作用下其结构在压缩、拉伸、扭转等方面受载情况近似相等,如图3-5所示.
图3-5简化后的下摆臂模型
3.3下摆臂模型的网格剖分
有限元方法的求解过程总体上由前处理、有限元计算和后处理三部分组成。
据有关资料统计,在整个有限元处理时间中,前处理部分占40%~45%,后处理部分占55%~60%,而分析求解计算的时间只占5%左右.网格划分是有限元前处理中的主要工作,也是整个有限元分析的关键工作,网格划分的质量和优劣将对计算结果产生相当大的影响.网格削分不仅繁琐、费时,而目在许多地方,在很大程度上依赖于人的经验和技巧.近年来推出了许多的自动划分网格的前处理软件,但总的来说,这些软件都还存在这样或那样的缺点.因此。
对有限元网格划分进行不断的试验、比较并积累经验是十分必要的p”.
田3-9下摆臂的自由罔格剖分田(SMARTSIZⅨ)
由于SMARTSIZE6命令剖分下摆臂模型得到的网格单元数量很大,影响了以后的受力分析速度,因此为了提高软件运算速度.应更改命令SMARTSIZE6为SMARTSIZEl0以降低网格数量,如图3.10所示.
图3.-10下摆臂的自由网格剖分圈(SMARTSIZEl0)
如果采用SMARTSIZE命令后剖分的网格太粗糙,剖分完成后,ANSYS会发出警告,提示剖分单元的雅可比比率超出ANSYS的极限。
图3.1l为下摆臂模型剖分完成之后,雅可比比值异常的单元.
圈3-11雅可比比值异常单元显示田
.-I比比值(Jacobian恕Ilio)是单元内各个积分点雅可比矩阵值中的最小值与最大值之比,即…thesmallestJaeobianmatrix
’蝴6mK蛳o
2面五磊瓦磊i忑ii
可通过矩形单元等参变换计算雅可比矩阵值.如图3-12表示,任意单元的四个节点l、2、3、4进行f一叩坐标变换成规则矩形单元,这样使计算简便·
可
4D一望
|‘]‘I.,\12f|j。
凸.一一II
I43
012
图3.12矩形的等参变换
以图3.12中右图(-t,-1)点为例。
其雅可比矩阵值为:
I卅㈨,=佤一x,Xr,-r,)-(x,-x,Xr:一X)=‘,4sinB
一般雅可比比值的绝对值小于1,越接近i单元质量越好,四边形单元的雅可比比值不能为负值,否则计算不会收敛I.1I.自由剖分表面网格单元角度过小会造成雅可比比值过大。
在ANSYS系统中设定的最大值为30。
如果超出最大值,则说明单元过度扭曲,这样的网格剖分仍然可以计算,但结果不太理想,最好重新划分网格。
3.3.3混合网格剖分的分法与技巧
混合网格剖分是解决复杂模型网格剖分的一种有效方法.它是将复杂模型分割成若干简单子模型,再根据子模型的几何特征综合使用自由网格剖分、映射网格剖分和拖拉、扫掠网格剖分三种方法.
从实体结构看下摆臂模型比较复杂,既有狭长实体,又有变截面体和不规则实体,,最好采用混合剖分.可以使用面的分割或根据当前坐标系的分割,先将下摆臂模型的狭长实体分割出来,并对其先进行映射剖分,以得到较好的网格质量;然后再对不规则实体做自由剖分,这样将极大地减小奇异单元产生的机率.
自由剖分网格的表面可以是三角形或四边形,但映射剖分的网格只能是四边形.为了使相邻面的网格剖分相互对应,自由剖分要兼顾映射削分,否则在相邻界面处可能会因为单元形状或单元自由度数不同而出现不协调。
不协调的单元在求解时会在不同单元间传递不适当的力或力矩【蜘.
图3.13为混合剖分下摆臂模型后的网格剖分图.
田3-13下摆臂的混合网格剖分图
3.4下摆臂的加载分析
由本文第二章可知,麦弗逊式前悬架下摆臂可简化为二力杆,其受力最大工况为驶过障碍路面工况.电动车下摆臂受到的最大作用力为6.89kN,原型车下摆臂受到的最大作用力4.51kN.由麦弗逊式前悬架的装配图可知,下摆臂一端通过下摆臂衬套和下摆臂支架同车身相连,一端通过球头销同转向节相连,因此,下摆臂同车身相连的一端为约束端,通过球头销同转向节相连的另一端为受载端,其受力方向应为约束端与受载端的连线方向,指向约束端.利用ANSYS软件对下摆臂进行有限元分析.具体的设计与实现步骤如下:
1.在约束端的内表面施加约束:执行MainMenulSolution[DefineLoads[ApplyIs觚嘶IfalⅡ)isplacementtonAreas命令,拾取约束端的内表面;
2.在受力端的内表面施加载荷;执行MainMenuISolutionp娟∞LoadsIApptyIStructural妒ressurelOnAreas命令,拾取受力端的内表面并设置载荷步及各项参数:
3.选择求解器并求解:执行MainMenuISolutionISolve阻rentLS命令,完成求解运算;
4.结果的后处理分析.
3.4.1电动车下摆臂的ANSYS后处理分析
在通用后处理器中查看电动车下摆臂在6.89k_N的载荷作用下应力和应变的分布和变化情况,如图3.14和图3.15所示.
田3-14电动车下摆臂变形形状结果
图3.15电动车下摆臂vonMises等效应力图
由图3-15电动车下摆臂节点应力云图可知,下摆臂节点受到的最大应力为325.529MPa,最大应力点集中分布在靠近约束端处;最小应力为4.786kPa。
3.4.2原型车下摆臂的ANSYS后处理分析
在通用后处理器中查看原型车下摆臂在4.51kN的载荷作用下应力和应变的分布和变化情况,如图3.16和图3.17所示.
圈3-16原型车下摆臂变形形状结果
圈3-17原型车下摆臂vonMises等效应力图。