系统的稳定性分析PPT课件
合集下载
信号与系统课件7.2系统的稳定性
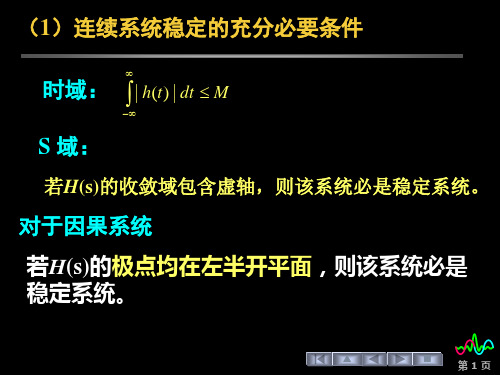
(1)连续系统稳定的充分必要条件
时域: | h(t) | dt M
S 域:
若H(s)的收敛域包含虚轴,则该系统必是稳定系统。
对于因果系统 若H(s)的极点均在左半开平面,则该系统必是 稳定系统。
▲
■
第1页
(2)离散系统稳定的充分必要条件
时域: | h(k) | M k
Z 域:
若H(z)的收敛域包含单位圆,则该系统必是稳定系统。
解:设加法器输出信号X(z)
2
z-1X(z)
X(z)=F(z)+z-1aX(z)
∑
z 1
F(z)
X(z)
a
∑ Y(z)
Y(z)=(2+z-1)X(z)= (2+z-1)/(1-az-1)F(z)
H(z)= (2+z-1)/(1-az-1)=(2z+1)/(z-a)
为使系统稳定,H(z)的极点必须在单位园内, 故|a|<1
例1 A(s)=s3+4s2-3s+2 符号相异,不稳定 例2 A(s)=3s3+s2+2 , a1=0,不稳定 例3 A(s)=3s3+s2+2s+8 需进一步判断,非充分条件。
▲
■
第5页
2、罗斯列表
将多项式A(s)的系数排列为如下阵列—罗斯阵列 第1行 an an-2 an-4 … 第2行 an-1 an-3 an-5 … 第3行 cn-1 cn-3 cn-5 … 它由第1,2行,按下列规则计算得到:
an a0
a2 an2
…
一直到第2n-3行,该行有3个元素。
朱里准则指出:
A(z)=0的所有根都在单位圆内的充分必要的条件是:
时域: | h(t) | dt M
S 域:
若H(s)的收敛域包含虚轴,则该系统必是稳定系统。
对于因果系统 若H(s)的极点均在左半开平面,则该系统必是 稳定系统。
▲
■
第1页
(2)离散系统稳定的充分必要条件
时域: | h(k) | M k
Z 域:
若H(z)的收敛域包含单位圆,则该系统必是稳定系统。
解:设加法器输出信号X(z)
2
z-1X(z)
X(z)=F(z)+z-1aX(z)
∑
z 1
F(z)
X(z)
a
∑ Y(z)
Y(z)=(2+z-1)X(z)= (2+z-1)/(1-az-1)F(z)
H(z)= (2+z-1)/(1-az-1)=(2z+1)/(z-a)
为使系统稳定,H(z)的极点必须在单位园内, 故|a|<1
例1 A(s)=s3+4s2-3s+2 符号相异,不稳定 例2 A(s)=3s3+s2+2 , a1=0,不稳定 例3 A(s)=3s3+s2+2s+8 需进一步判断,非充分条件。
▲
■
第5页
2、罗斯列表
将多项式A(s)的系数排列为如下阵列—罗斯阵列 第1行 an an-2 an-4 … 第2行 an-1 an-3 an-5 … 第3行 cn-1 cn-3 cn-5 … 它由第1,2行,按下列规则计算得到:
an a0
a2 an2
…
一直到第2n-3行,该行有3个元素。
朱里准则指出:
A(z)=0的所有根都在单位圆内的充分必要的条件是:
《生态系统的稳定性》PPT课件
2. 在一个由草、野兔、狼组成的相对封闭的生态系统中,如果、将狼杀绝,野兔的数量变化可用下图中哪一曲线来表示( )
A
C
课堂反馈
3. 图23-02中图A、图B均是草原生态系统的食物网图示,据图回答。
(1)图A 中数量最多的动物是______;图B中数量最少的动物是______。(2)图B中属于生产者的是_______;直接以植物为食的消费者是___________。(3)图B中食物网有_____条食物链,写出最长的一天食物链______________; 消费者有____种,分别是________________________________。(4)图B中倘若一些不法分子为了获取毛皮而大量捕猎狐狸,则会使 ________大量增加,导致____________,最终导致____________________。(5)本题中哪一个生态系统的稳定性容易维持?为什么?
水葫芦
大米草
外来物种入侵
情景再现
火山喷发
情景再现
环境污染
情景再现
土壤沙化
情景再现
过度采伐
课堂反馈
从前的黄土高原有茫茫的林海和无边的草原,而如今却成了荒山秃岭,主要原因是( ) A. 地球的温室效应造成的 B. 气候变得干燥造成的 C. 人类乱砍滥伐造成了生态系统稳定性破坏 D. 地壳变迁所致
当生态系统发生一定的变化或受到外来因素干扰时,它可以通过生态系统内部的自我调节,克服系统内部的变化和外来干扰因素的影响,维持相对稳定和平衡的状态。 即:生态系统具有一定的自我调节能力。
(1)自然因素:火山爆发、地震、泥石流、 洪水泛滥、台风海啸等。(2)人为因素:过度开发、环境污染等。
仔鹿
野狗
草
狮子
秃鹰
A
C
课堂反馈
3. 图23-02中图A、图B均是草原生态系统的食物网图示,据图回答。
(1)图A 中数量最多的动物是______;图B中数量最少的动物是______。(2)图B中属于生产者的是_______;直接以植物为食的消费者是___________。(3)图B中食物网有_____条食物链,写出最长的一天食物链______________; 消费者有____种,分别是________________________________。(4)图B中倘若一些不法分子为了获取毛皮而大量捕猎狐狸,则会使 ________大量增加,导致____________,最终导致____________________。(5)本题中哪一个生态系统的稳定性容易维持?为什么?
水葫芦
大米草
外来物种入侵
情景再现
火山喷发
情景再现
环境污染
情景再现
土壤沙化
情景再现
过度采伐
课堂反馈
从前的黄土高原有茫茫的林海和无边的草原,而如今却成了荒山秃岭,主要原因是( ) A. 地球的温室效应造成的 B. 气候变得干燥造成的 C. 人类乱砍滥伐造成了生态系统稳定性破坏 D. 地壳变迁所致
当生态系统发生一定的变化或受到外来因素干扰时,它可以通过生态系统内部的自我调节,克服系统内部的变化和外来干扰因素的影响,维持相对稳定和平衡的状态。 即:生态系统具有一定的自我调节能力。
(1)自然因素:火山爆发、地震、泥石流、 洪水泛滥、台风海啸等。(2)人为因素:过度开发、环境污染等。
仔鹿
野狗
草
狮子
秃鹰
《生态系统的稳定性》PPT课件
我国主要自然致灾因子
三、人类活动对生态系统的影响
人类活动对生态系统造成的消极影响
人类活动对生态系统造成的消极影响
人类活动对生态系统的影响
(1)人类对自然资源的不合理开发 A.对森林的过量采伐、对草原的过度放牧、对石油海洋 的过度开发造成植被破坏。 B.对某些动物的过度围猎造成食物链破坏。 (2)人类活动造成的环境污染 工业三废、农药化肥、生活垃圾、生活废水、汽车排放 尾气而造成的大气、水和土壤污染等。
自动调节能力的有限性
影响生态系统的自然因素 自然因素对生态系统的影响和破坏
课堂总结
生态系 统的稳 定性
人类活动 对生态系 统的影响
人类活动对环境的消极影响
人类活动 能改善生 态环境
建立林业生态体系 建立自然保护区 颁布相关法律 综合治理各种环境污染
及时巩固
1.下列影响生态系统稳定性的因素中,不属于自然因 素的是( B ) A.早期霜冻影响了蔬菜园西红柿的产量 B.设立自然保护区,保护野生动植物资源 C.一场洪水或一次飓风毁掉了动物的巢穴 D.由于某种疾病使得某一地区的大多数兔子死亡
生态系统具有保持或恢复自身结构和功能相对稳 定的能力,因此生态系统具有相对稳定性。
少量砍伐森林中的树木,森林的 结构功能不会破坏。
草原上适量放养牲畜,草原不 会被破坏。
森林生态系统和农田生态系统相比,哪个的抵抗力强,哪个 受破坏后容易恢复?
抵抗力强、恢复力弱
抵抗力弱、恢复力强
一般来说,生态系统成分越复杂,生物种类越多,自 动调节能力就越强、生态系统的稳定性越高,但是一 旦被破坏,恢复起来也就越慢。
生态系统的自动调节能力都有一定的限度。
二、自然因素对生态系统的影响
火山喷发、地震、海啸、水旱灾害、雷电、火灾、台风、 滑坡、泥石流等都可使生态系统在短时间内遭到破坏。
控制系统的稳定性分析分解课件
控制系统的稳定性分析分 解课件
目 录
• 控制系统稳定性分析方法 • 控制系统稳定性判据 • 控制系统稳定性优化方法 • 控制系统稳定性实例分析 • 控制系统稳定性总结与展望
01 引言
控制系统稳定性概念
01
02
03
稳定性定义
控制系统在受到外部扰动 后,能否恢复到平衡状态 的能力。
稳定性分类
根据系统性质不同,可分 为渐近稳定、指数稳定、 BIBO稳定等。
实例一:机械臂控制系统稳定性分析
01
02
03
04
系统建模
建立机械臂的动力学模型,包 括电机、减速器等组件的动力
学方程。
稳定性判据
应用劳斯判据或奈奎斯特判据 等方法,判断系统的稳定性。
控制器设计
设计合适的控制器,如PID控 制器,以保证系统的稳定性。
仿真与实验
通过仿真和实验验证控制器的 有效性,并对系统稳定性进行
定性。
超前校正优点
03
校正后系统带宽增宽,动态性能提高,对高频噪声有抑制作用。
滞后校正
滞后校正网络
采用RC电路构成的滞后网络,降低系统高频部分的增益,提高 相位裕量。
滞后校正原理
通过牺牲系统带宽来换取更大的相位裕量,从而提高系统稳定性。
滞后校正优点
对低频段增益影响较小,可保持系统稳态精度,同时有效抑制高 频噪声。
稳态误差分析
通过计算系统的稳态误差来分析系 统的稳定性和精度,包括静态误差 系数法、终值定理法等。
动态性能分析
通过分析系统的动态性能指标(如 调节时间、超调量等)来评估系统 的稳定性,常用的方法有相平面法、 时域响应法等。
频域分析法
奈奎斯特稳定判据
目 录
• 控制系统稳定性分析方法 • 控制系统稳定性判据 • 控制系统稳定性优化方法 • 控制系统稳定性实例分析 • 控制系统稳定性总结与展望
01 引言
控制系统稳定性概念
01
02
03
稳定性定义
控制系统在受到外部扰动 后,能否恢复到平衡状态 的能力。
稳定性分类
根据系统性质不同,可分 为渐近稳定、指数稳定、 BIBO稳定等。
实例一:机械臂控制系统稳定性分析
01
02
03
04
系统建模
建立机械臂的动力学模型,包 括电机、减速器等组件的动力
学方程。
稳定性判据
应用劳斯判据或奈奎斯特判据 等方法,判断系统的稳定性。
控制器设计
设计合适的控制器,如PID控 制器,以保证系统的稳定性。
仿真与实验
通过仿真和实验验证控制器的 有效性,并对系统稳定性进行
定性。
超前校正优点
03
校正后系统带宽增宽,动态性能提高,对高频噪声有抑制作用。
滞后校正
滞后校正网络
采用RC电路构成的滞后网络,降低系统高频部分的增益,提高 相位裕量。
滞后校正原理
通过牺牲系统带宽来换取更大的相位裕量,从而提高系统稳定性。
滞后校正优点
对低频段增益影响较小,可保持系统稳态精度,同时有效抑制高 频噪声。
稳态误差分析
通过计算系统的稳态误差来分析系 统的稳定性和精度,包括静态误差 系数法、终值定理法等。
动态性能分析
通过分析系统的动态性能指标(如 调节时间、超调量等)来评估系统 的稳定性,常用的方法有相平面法、 时域响应法等。
频域分析法
奈奎斯特稳定判据
线性系统的稳定性分析优秀课件

limc(t) 0
t
即输出增量收敛于原平衡点,则线性系统是(渐 近)稳定。
C(s) R(s)
ba00ssmnba11ssmn11
...bm1sbm ...an1san
B(s) D(s)
K
B(s)
k
a0 (spi) [s(j jj)][s(j jj)]
i1
j1
理想脉冲函数作用下 R(s)=1。
C(s)
K
R(s) s(s2s1)(s2)K
D (s ) s4 3 s 3 3 s2 2 s K 0
控制系统稳定的充分必要条件是:当a0>0时, 各 阶赫尔维茨行列式1、2、…、n均大于零。
1 2
a1 a3
a0 a2
0 n
a1
00
3
a5 a4 a3
0
n
0
一阶系统
0 0
a0>0时
a0>0时,
an1 0
an2 an
பைடு நூலகம்
D (s)a0sa10
1 a1 0
a1>0(全部系数数同号)
D (s)a0s2a1 s1 .a20
1 a1 0
2
a1 a0
a3 a2
a1a2a0a3
0
a1 a3 0 3 a0 a2 0 a22 0
0 a1 a3
a0>0时, a1>0, a2>0, a3>0(全部系数同号)
a1a2> a0 a3
四阶系统
D ( s ) a 0 s 4 a 1 s 3 .a 2 s 2 a 3 s a 4 0
(a)不稳定
临界稳定:若系统在扰动消失后,输出与原始的 平衡状态间存在恒定的偏差或输出维持等幅振荡, 则系统处于临界稳定状态。
t
即输出增量收敛于原平衡点,则线性系统是(渐 近)稳定。
C(s) R(s)
ba00ssmnba11ssmn11
...bm1sbm ...an1san
B(s) D(s)
K
B(s)
k
a0 (spi) [s(j jj)][s(j jj)]
i1
j1
理想脉冲函数作用下 R(s)=1。
C(s)
K
R(s) s(s2s1)(s2)K
D (s ) s4 3 s 3 3 s2 2 s K 0
控制系统稳定的充分必要条件是:当a0>0时, 各 阶赫尔维茨行列式1、2、…、n均大于零。
1 2
a1 a3
a0 a2
0 n
a1
00
3
a5 a4 a3
0
n
0
一阶系统
0 0
a0>0时
a0>0时,
an1 0
an2 an
பைடு நூலகம்
D (s)a0sa10
1 a1 0
a1>0(全部系数数同号)
D (s)a0s2a1 s1 .a20
1 a1 0
2
a1 a0
a3 a2
a1a2a0a3
0
a1 a3 0 3 a0 a2 0 a22 0
0 a1 a3
a0>0时, a1>0, a2>0, a3>0(全部系数同号)
a1a2> a0 a3
四阶系统
D ( s ) a 0 s 4 a 1 s 3 .a 2 s 2 a 3 s a 4 0
(a)不稳定
临界稳定:若系统在扰动消失后,输出与原始的 平衡状态间存在恒定的偏差或输出维持等幅振荡, 则系统处于临界稳定状态。
自动控制原理课件:线性系统的稳定性和稳态特性分析

设系统处于某一平衡状态,若此系统在干 扰作用下离开了原来的平衡状态,那么,在扰 动消失后,系统能否回到原来的平衡状态,这 就是系统的稳定性问题。
上述系统在干扰作用消失后,能够恢复到 原始的平衡状态,或者说系统的零输入响应具 有收敛性质,则系统为稳定的。
由此可得到线性系统稳定的充分必要条件: 系统特征方程的所有根(系统的所有闭环极点),均位于复数s平面的左半部.
系统给定误差传递函数为
Er (s) R(s)
1 1 G(s)
1
1 K (0.5s 1)
s(s 1)(3s 1)
Er
(s)
s(s
s(s 1)(3s 1) 1)(3s 1) K (0.5s
1)
R(s)
esr
lim
s0
sEr
(s)
lim s
s0
s(s 1)(3s 1)
1
s(s 1)(3s 1) K(0.5s 1) s
3.3 劳斯稳定判据 线性系统稳定与否,取决于特征根的实部是否均为负值(复数s平面
的左半部).但是求解高阶系统的特征方程是相当困难的.而劳斯判据,
避免解特征方程,只需对特征方程的系数进行代数运算,就可以判断系统
的稳定性,因此这种数据又称为代数稳定判据.
1.劳斯判据 将系统的特征方程写成如下标准形式
下面要讨论系统跟踪输入信号的精确度或抑制干扰信号的能 力.
这里讨论的稳态误差仅限于由系统结构、参数及输入信号的不 同而导致的稳态误差,不包含由于具体元件的灵敏性、温湿度影响所 带来的误差问题。
控制系统的输入包含给定输入和扰动量, 对应的控制系统的稳态误差也分为两类:
给定稳态误差
扰动稳态误差
Er (s) R(s) B(s) R(s) Er (s)Gc (s)Go (s)H(s)
上述系统在干扰作用消失后,能够恢复到 原始的平衡状态,或者说系统的零输入响应具 有收敛性质,则系统为稳定的。
由此可得到线性系统稳定的充分必要条件: 系统特征方程的所有根(系统的所有闭环极点),均位于复数s平面的左半部.
系统给定误差传递函数为
Er (s) R(s)
1 1 G(s)
1
1 K (0.5s 1)
s(s 1)(3s 1)
Er
(s)
s(s
s(s 1)(3s 1) 1)(3s 1) K (0.5s
1)
R(s)
esr
lim
s0
sEr
(s)
lim s
s0
s(s 1)(3s 1)
1
s(s 1)(3s 1) K(0.5s 1) s
3.3 劳斯稳定判据 线性系统稳定与否,取决于特征根的实部是否均为负值(复数s平面
的左半部).但是求解高阶系统的特征方程是相当困难的.而劳斯判据,
避免解特征方程,只需对特征方程的系数进行代数运算,就可以判断系统
的稳定性,因此这种数据又称为代数稳定判据.
1.劳斯判据 将系统的特征方程写成如下标准形式
下面要讨论系统跟踪输入信号的精确度或抑制干扰信号的能 力.
这里讨论的稳态误差仅限于由系统结构、参数及输入信号的不 同而导致的稳态误差,不包含由于具体元件的灵敏性、温湿度影响所 带来的误差问题。
控制系统的输入包含给定输入和扰动量, 对应的控制系统的稳态误差也分为两类:
给定稳态误差
扰动稳态误差
Er (s) R(s) B(s) R(s) Er (s)Gc (s)Go (s)H(s)
线性系统的稳定性分析ppt
03
时域仿真法
利用计算机仿真技术,对线性时变系统进行时域仿真。通过观察系统状
态变量的时域响应曲线,判断系统的稳定性。若系统状态变量最终趋于
零或稳定在某个固定值附近,则系统稳定。
PART 05
线性系统稳定性优化与控 制
系统稳定性优化方法
频域分析法
通过频率响应函数判断系 统稳定性,采用频域校正 方法如超前、滞后校正优 化系统性能。
根轨迹法
利用根轨迹图分析系统稳 定性,通过调整开环增益 或引入附加零点、极点改 善系统性能。
状态空间法
基于状态空间模型分析系 统稳定性,采用状态反馈 或输出反馈控制策略进行 系统优化。
控制器设计与实现
PID控制器
根据系统性能指标设计PID控制器 参数,实现闭环控制并优化系统 稳定性。
最优控制器
应用最优控制理论设计控制器,如 线性二次型调节器(LQR)或线性 二次型高斯控制(LQG),以实现 系统性能最优。
根轨迹法
01
02
03
根轨迹绘制
根据系统开环传递函数的 零点和极点,绘制根轨迹 图。
根轨迹分析
通过观察根轨迹的走向、 交点和与虚轴的相对位置, 判断系统在不同参数下的 稳定性。
根轨迹与系统性能
通过分析根轨迹与系统性 能指标(如超调量、调节 时间等)的关系,进一步 评估和优化系统性能。
PART 04
PART 03
线性时不变系统稳定性分 析方法
时域分析法
初始状态响应法
01
通过分析系统对初始状态的响应来判断稳定性,如系统的零输
入响应是否趋于零。
脉冲响应法
02
利用系统的脉冲响应函数,观察系统对脉冲输入的响应是否收
第七节计算机控制系统的稳定性课件

详细描述
目前,非线性控制已经在许 多领域得到了初步应用,如 航天器姿态控制、机器人运 动控制等,未来随着非线性 系统的广泛应用,非线性控 制在计算机控制系统稳定性 方面的研究将更加深入。
THANKS
软件算法设计
软件算法设计不合理, 如控制算法的参数调整 不当,也可能影响系统
的稳定性。
02 计算机控制系统稳定性 分析方法
频域分析法
定义
频域分析法是一种通过分析系 统的频率响应来评估系统稳定
性的方法。
原理
将系统的动态特性表示为频率 域中的复数函数,通过分析这 些函数的极点和零点来评估系 统的稳定性。
优点
可以提供系统在整个频率范围 内的稳定性信息,适用于分析 多输入多输出系统。
缺点
计算较为复杂,需要求解高阶 线性方程组。
时域分析法
定义
原理
时域分析法是一种通过直接分析系统在时 间域内的响应来评估系统稳定性的方法。
通过求解系统的差分方程或微分方程,得 到系统在时间域内的响应,然后根据这些 响应判断系统的稳定性。
实例二:智能家居控制系统的稳定性分析
总结词
智能家居控制系统的稳定性对于家庭生活的舒适性和便利性至关重要。
详细描述
智能家居控制系统的稳定性分析主要关注系统对各种家庭环境的适应性,以及系 统在面对各种干扰和变化时的表现。这包括对网络通信的稳定性分析、对控制设 备的响应速度和准确性的评估以及对系统容错能力的评估。
系统参数优化
系统参数的优化是提高计算机 控制系统稳定性的重要手段。
通过调整系统参数,可以改善 系统的动态特性和稳态特性, 从而提高系统的稳定性。
在进行系统参数优化时,应采 用科学的方法,如遗传算法、 粒子群算法等,以实现最优参 数的自动寻优。
系统稳定性分析ppt课件

lim
t
xo
t
此时系统是不稳定的。
第六章 系统稳定性分析
若系统特征根具有重根时,只要满足Re[si]<0,有
lim
t
xo
t
0
系统就是稳定的。
系统稳定的充分必要条件是: 系统特征方程的根全部具有负实部。系统的特
征根就是系统闭环传递函数的极点,因此,系统 稳定的充分必要条件还可以表述为:系统闭环传
递函数的极点全部位于[s]平面的左半平面。
2
0
第六章 系统稳定性分析
Im
1 GK j
ω=+∞ ω=0
0
Re
(-1,j0)
ω
Im
GK j
ω=+∞ ω=0
0
Re
ω
当ω从0变到+∞时,F(jω)相角变化为0, 即F(jω)的Nyquist图不包围原点,则闭环系统稳 定。
由于F(jω)=1+GK(jω),所以GK(jω)的 Nyquist图不包围(-1,j0)点,闭环系统稳定。
s2 6
16
0
号都为正,说明系统没 有右根,但是因为s3行 的各项系数全为零,说 明虚轴上有共轭虚根, 其根可解辅助方程
s1 8 / 3 0
2s4 12s2 16 0
s0 16 0
得s1,2 2 j,s3,4 2 j
由此可见,系统处于临界稳定状态。
第六章 系统稳定性分析
6.3 Nyquist稳定判据 利用系统开环Nyquist图,来判断系统闭环
若系统有一对共轭极点位于虚轴上或有一极点位 于原点,其余极点均位于[s]平面的左半平面,则 零输入响应趋于等幅振荡或恒定值,此时系统处 于临界稳定状态。临界稳定系统属于不稳定系统。
自动控制原理01系统的稳定性分析课件
0
8*162*0 16 8
F (s) 2s4 12s2 16 0 即: (s2 2)(s2 4) 0
解之得: s1,2 j 2
s3,4 j2
3.1.3 稳定判据
(3)劳斯稳定判据的应用
例3-4 某单位反馈系统的开环传递函数为 G(s)
K
s(s 1)(s 5)
求取使系统稳定时的K的取值范围。
F (s) 2s4 12s2 16 0 F(s) 8s3 24s ds
s4 1612 2
2
s3 08
结论:第一列没有变号, 说明系统不含正实部根; 系统不稳定,出现纯虚根
s2 8*122*246 8
s 1 6*248*168 63
s0 16
8
12
4016 12 2
0 24
20 16
16
0
320 16 2
分析系统稳定性。 解:用方法①
结论:系统不稳定, 有2个正实部极点
s4
1
s3
4
s 2 4*11*4 0 4
s1
4* 4*1 0
s0
1
11Biblioteka 404*11*0 1 4
3.1.3 稳定判据
例3-2:用方法②,将特征方程乘以s+1,得:
s5 5s4 5s3 5s2 5s 1 0
用此式构建劳斯表:
q
C(t)
Aje pjt
j 1
dk k 1 k 2
r
[ Bk ekkt
k 1
c osdk t
Ck
dk
ekk t
sin dkt]
系统稳定的条件: ① 系统的实数极点一定为负数
② 系统的复数极点一定具有负实部
《生态系统的稳定性》人教版高中生物必修PPT精品课件

• 例2 某生物兴趣小组的同学用河水、池泥、水藻、植食性小鱼等材料制作了2个生态 瓶(如图所示),并用凡士林将广口瓶密封,观察其稳定性。请回答下列问题
•: 生态系统
• (1)每个生态瓶构甲成一个 甲瓶有光,其照,中植各物种能生进物行存光合活作用
• 时间更长的是 是
CO2等瓶无,机原物因
物质循环 。
四、提高生态系统的稳定性-----措 施
设计生态缸并观察其稳定性 目标:通过动手自制小型生态瓶(缸),认真观察记录这一人工生态系统的稳定性。
思考:1.设计时要考虑的生态系统成分有哪些? 2.达到稳定状态后,生态缸内的生物种类和数量有无变化?
四、提高生态系统的稳定性-----措 施
原理: 生态系统的稳定性是结构和功能发展要协调的重要标志
生态缸中能够进行物质循环和能量流动, 在一定时期内保持相对稳定
生态缸的材料必须透明
为光合作用提供光能;保持生态缸内的温度;便于观察
生态缸宜小不宜大,缸中的水量应 占其容积的4/5,要留出一定的空间
生态缸的采光用散射光
选择生命力强的生物,动物不宜太 多,个体不宜太大
便于操作;缸内储备一定量的空气
防止水温过高导致水生生物死亡 容易适应新生态环境,减少对O2的消耗, 防止O2的产生量小于消耗量
生态系统的稳定程度,取决于它的物种组成、营养结构和非生物因素之间的协调 关系
观察指标:观察生态缸中生物的生存状况和存活时间,了解生态系统稳定性及影 响稳定性的因素
四、提高生态系统的稳定性-----措 施
分析下列生态缸设计的相关要求
设计要求
相关分析
生态缸必须是封闭的
防止外界生物或非生物因素的干扰
生态缸中投放的几种生物必须具有 很强的生活力,成分齐全(具有生产 者、消费者和分解者)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• Lyapunov定义了一个虚构的能量函数,称为 Lyapunov函数。
• 这个函数无疑比能量更为一般,其应用也更 广泛。
• 4.1.3 Lyapunov意义下的稳定性定义
系统
的平衡状
态xe的球域S(r), r>0, 是所有满足下式的
状态的集合
为向量的2范数或两点的距离, 即
Lyapunov意义下的稳定.
例4.2.3 图4.1所示的电路中, 设电感是
线性的, 电阻
, 而电容具有
非线性的库伏特性
,
则状态方程是
电路无外界的能量输入, 同时电路中没有
耗能元件, 所以电路总能量W恒定不变,
从上述式子的最后一个等号容易求出
图4.4 例4.1.3状态方程相 图
图4.4表明, 从原点任意小的领域出发的
对于一些纯数学系统,毕竟还没有一个定义 “能量函数”的简便方法。为了克服这个困 难,
电容都是线性的, 并且R>0, 则状态方程是
此电路中电阻是耗能元件, 所以电路总能
量是不断减少的.为简单起见, 设C=2, R=3,
L=1,再令初始状态为
.
利用拉普拉斯反变换求解上述方程, 先求预解 矩阵
从方程的解,可以得出系统能量的衰减
图4.3 例4.1.2状态方程相图
图4.3表明,从原点很小的领域出发的轨迹 能保持在原点附近, 并能逐渐趋向于原点, 或者说是渐近稳定的.
1892年, 俄国数学家Lyapunov在其博 士论文《运动稳定性的一般问题》, 给出 了
–稳定性概念的严格数学定义
–解决稳定性问题的一般方法
–奠定了现代稳定性理论的基础.
Lyapunov提出了两类解决稳定性问题的方法, 即Lyapunov第一方法和Lyapunov第二方法.
第一方法是通过微分方程的解来分析运动稳定性
• 稳定到平衡状态—问题的简化 • 能量函数 • Lyapunov意义下的稳定性定义
4.1.1 平衡状态
非线性系统
式中x为n维状态向量, f (x,t)是变量x1, x2,…xn和t的n维向量 函数.
如果在上式所描述的系统中, 对所有时间t, 都有
则xe称为系统的平衡状态或平衡点
系统平衡状态的几点说明:
Lyapunov意义下的不稳定
平衡状态不稳定不能说明轨 迹将趋于无穷远处, 这是因为 轨迹还可能趋于某个极限环.
定义4.2.4 系统
的平衡状态xe, 如果 存在ε>0, 对不管多 么小的δ>0, 在球域 S(δ)内始终存在状态 x0, 使得以x0为初始 状态的轨迹x(t), t>t0,不能完全在S(ε)
内, 此平衡状态称为
在Lyapunov意义下是
不稳定的.
稳定性概念的几点说明:
稳定和渐近稳定的定义均是针对平衡点附近的局部性质. 对于线性系统, 渐近稳定等价于大范围渐近稳定.
4.2 Lyapunov稳定性 第二方法
• 正定和负定函数 • Lyapunov稳定性定理 • Lyapunov稳定性定理的应用
写出状态方程,
电路无外界的能量输入, 同时电路中没有
耗能元件, 所以电路总能量W恒定不变.
从上述式子的最后一个等号看出系统的轨
图4.2 例4.1.1状态方程相 图
从原点很小的领域出发的轨迹能保持在原 点附近, 但也不能逐渐趋向于原点, 或者 说是稳定的.
例4.1.2 图4.1所示的电路中, 设电感和
第4章 Lyapunov稳定性理论
•Lyapunov意义下的稳定性 •Lyapunov第二方法
•线性系统的稳定性分析 •离散时间系统稳定性分析 •Lyapunov稳定性方法在控制系统分析中的应用
实际工程中的(闭环)系统必须平稳 运行, 比如希望系统状态能保持在一个确 定的工作点附近.
用状态空间的说法是(闭环)系统运 行渐进到一个状态
定义4.2.1 系统
的平衡状态xe, 如果 对应于每一个ε>0, 存在一个δ>0(与ε 和t0有关), 使得对 t>t0, 初速状态在 S(δ)内的轨迹不脱离 S(ε), 此平衡状态称
为在Lyapunov意义下 是稳定的.
Lyapunov意义下的渐近稳定
定义4.2.2 系统
的平衡状态xe, 如果 对应于每一个ε>0 , 存在一个δ>0(与ε 和t0有关), 使得初 始状态在S(δ)内的轨 迹始终在S(ε)内,并 且当t →∞时 x(t)→xe, 此平衡状
• 本课程仅讨论扰动方程关于原点这个平衡状 态的稳定性问题, 这种所谓原点稳定性问题.
4.1.2 能量函数
• 稳定性—相关—广义系统能量 • Lyapunov函数—广义的系统能量函数
图4.1 RLC串联电路
例4.1.1 图4.1所示的电路中, 设电感和
电容都是线性的, 并且
. 以电
感磁通 Ψ 和电容电荷 q 为状态变量, 可
–要求解系统的解而在实际应用中受到很大的限制. –但对某些微分方程来说是比较便利的, 比如线性定常微分方程.
(未来可能比较重要)
第二方法构造一个正定的Lyapunov函数
– 一般所说的Lyapunov方法常常就是指Lyapunov第二方法. –目前仍是控制理论研究的主要方法 –本章重点
4.1பைடு நூலகம்Lyapunov意义下的稳定性
• 如果系统是线性定常的, 即f (x, t)=Ax, 则当A为非奇异矩阵时, 系统存在一个唯一 的平衡状态; 当A为奇异矩阵时, 系统将存 在无穷多个平衡状态.
• 非线性系统则可以有一个或多个平衡状态 或者没有平衡状态, 这些状态对应于系统 的常值解.
稳定性问题的一种简化:
任意一个孤立的平衡状态(即彼此孤立的平 衡状态)或给定运动都可通过适当的坐标变 换, 转化为另一个方程的坐标原点.
态称为在Lyapunov意 义下是渐近稳定的.
定义4.2.3 对系统的所有状态,如果由 这些状态出发的轨迹都保持渐近稳定性,
则平衡状态xe=0称为大范围渐近稳定。
或者说,如果系统的平衡状态渐 近稳定的吸引域为整个状态空间,则称系 统的平衡状态为大范围渐近稳定的。
大范围渐近稳定的必要条件是在 整个状态空间中只有一个平衡状态。
标量函数的正定性 对域Ω(域Ω包含状态空间的原
点)上定义的标量函数V (x),如果对所有 域Ω中的非零状态 x ≠ 0 ,有V (x)>0, 且在x=0处有V (0) =0,则V (x)称为正定
函数。
对域Ω(域Ω包含状态空间的原点)上定
• 这个函数无疑比能量更为一般,其应用也更 广泛。
• 4.1.3 Lyapunov意义下的稳定性定义
系统
的平衡状
态xe的球域S(r), r>0, 是所有满足下式的
状态的集合
为向量的2范数或两点的距离, 即
Lyapunov意义下的稳定.
例4.2.3 图4.1所示的电路中, 设电感是
线性的, 电阻
, 而电容具有
非线性的库伏特性
,
则状态方程是
电路无外界的能量输入, 同时电路中没有
耗能元件, 所以电路总能量W恒定不变,
从上述式子的最后一个等号容易求出
图4.4 例4.1.3状态方程相 图
图4.4表明, 从原点任意小的领域出发的
对于一些纯数学系统,毕竟还没有一个定义 “能量函数”的简便方法。为了克服这个困 难,
电容都是线性的, 并且R>0, 则状态方程是
此电路中电阻是耗能元件, 所以电路总能
量是不断减少的.为简单起见, 设C=2, R=3,
L=1,再令初始状态为
.
利用拉普拉斯反变换求解上述方程, 先求预解 矩阵
从方程的解,可以得出系统能量的衰减
图4.3 例4.1.2状态方程相图
图4.3表明,从原点很小的领域出发的轨迹 能保持在原点附近, 并能逐渐趋向于原点, 或者说是渐近稳定的.
1892年, 俄国数学家Lyapunov在其博 士论文《运动稳定性的一般问题》, 给出 了
–稳定性概念的严格数学定义
–解决稳定性问题的一般方法
–奠定了现代稳定性理论的基础.
Lyapunov提出了两类解决稳定性问题的方法, 即Lyapunov第一方法和Lyapunov第二方法.
第一方法是通过微分方程的解来分析运动稳定性
• 稳定到平衡状态—问题的简化 • 能量函数 • Lyapunov意义下的稳定性定义
4.1.1 平衡状态
非线性系统
式中x为n维状态向量, f (x,t)是变量x1, x2,…xn和t的n维向量 函数.
如果在上式所描述的系统中, 对所有时间t, 都有
则xe称为系统的平衡状态或平衡点
系统平衡状态的几点说明:
Lyapunov意义下的不稳定
平衡状态不稳定不能说明轨 迹将趋于无穷远处, 这是因为 轨迹还可能趋于某个极限环.
定义4.2.4 系统
的平衡状态xe, 如果 存在ε>0, 对不管多 么小的δ>0, 在球域 S(δ)内始终存在状态 x0, 使得以x0为初始 状态的轨迹x(t), t>t0,不能完全在S(ε)
内, 此平衡状态称为
在Lyapunov意义下是
不稳定的.
稳定性概念的几点说明:
稳定和渐近稳定的定义均是针对平衡点附近的局部性质. 对于线性系统, 渐近稳定等价于大范围渐近稳定.
4.2 Lyapunov稳定性 第二方法
• 正定和负定函数 • Lyapunov稳定性定理 • Lyapunov稳定性定理的应用
写出状态方程,
电路无外界的能量输入, 同时电路中没有
耗能元件, 所以电路总能量W恒定不变.
从上述式子的最后一个等号看出系统的轨
图4.2 例4.1.1状态方程相 图
从原点很小的领域出发的轨迹能保持在原 点附近, 但也不能逐渐趋向于原点, 或者 说是稳定的.
例4.1.2 图4.1所示的电路中, 设电感和
第4章 Lyapunov稳定性理论
•Lyapunov意义下的稳定性 •Lyapunov第二方法
•线性系统的稳定性分析 •离散时间系统稳定性分析 •Lyapunov稳定性方法在控制系统分析中的应用
实际工程中的(闭环)系统必须平稳 运行, 比如希望系统状态能保持在一个确 定的工作点附近.
用状态空间的说法是(闭环)系统运 行渐进到一个状态
定义4.2.1 系统
的平衡状态xe, 如果 对应于每一个ε>0, 存在一个δ>0(与ε 和t0有关), 使得对 t>t0, 初速状态在 S(δ)内的轨迹不脱离 S(ε), 此平衡状态称
为在Lyapunov意义下 是稳定的.
Lyapunov意义下的渐近稳定
定义4.2.2 系统
的平衡状态xe, 如果 对应于每一个ε>0 , 存在一个δ>0(与ε 和t0有关), 使得初 始状态在S(δ)内的轨 迹始终在S(ε)内,并 且当t →∞时 x(t)→xe, 此平衡状
• 本课程仅讨论扰动方程关于原点这个平衡状 态的稳定性问题, 这种所谓原点稳定性问题.
4.1.2 能量函数
• 稳定性—相关—广义系统能量 • Lyapunov函数—广义的系统能量函数
图4.1 RLC串联电路
例4.1.1 图4.1所示的电路中, 设电感和
电容都是线性的, 并且
. 以电
感磁通 Ψ 和电容电荷 q 为状态变量, 可
–要求解系统的解而在实际应用中受到很大的限制. –但对某些微分方程来说是比较便利的, 比如线性定常微分方程.
(未来可能比较重要)
第二方法构造一个正定的Lyapunov函数
– 一般所说的Lyapunov方法常常就是指Lyapunov第二方法. –目前仍是控制理论研究的主要方法 –本章重点
4.1பைடு நூலகம்Lyapunov意义下的稳定性
• 如果系统是线性定常的, 即f (x, t)=Ax, 则当A为非奇异矩阵时, 系统存在一个唯一 的平衡状态; 当A为奇异矩阵时, 系统将存 在无穷多个平衡状态.
• 非线性系统则可以有一个或多个平衡状态 或者没有平衡状态, 这些状态对应于系统 的常值解.
稳定性问题的一种简化:
任意一个孤立的平衡状态(即彼此孤立的平 衡状态)或给定运动都可通过适当的坐标变 换, 转化为另一个方程的坐标原点.
态称为在Lyapunov意 义下是渐近稳定的.
定义4.2.3 对系统的所有状态,如果由 这些状态出发的轨迹都保持渐近稳定性,
则平衡状态xe=0称为大范围渐近稳定。
或者说,如果系统的平衡状态渐 近稳定的吸引域为整个状态空间,则称系 统的平衡状态为大范围渐近稳定的。
大范围渐近稳定的必要条件是在 整个状态空间中只有一个平衡状态。
标量函数的正定性 对域Ω(域Ω包含状态空间的原
点)上定义的标量函数V (x),如果对所有 域Ω中的非零状态 x ≠ 0 ,有V (x)>0, 且在x=0处有V (0) =0,则V (x)称为正定
函数。
对域Ω(域Ω包含状态空间的原点)上定