线性规划和匈牙利法
最大化指派问题匈牙利算法

最大化指派问题匈牙利算法匈牙利算法,也称为Kuhn-Munkres算法,是用于解决最大化指派问题(Maximum Bipartite Matching Problem)的经典算法。
最大化指派问题是在一个二分图中,找到一个匹配(即边的集合),使得匹配的边权重之和最大。
下面我将从多个角度全面地介绍匈牙利算法。
1. 算法原理:匈牙利算法基于增广路径的思想,通过不断寻找增广路径来逐步扩展匹配集合,直到无法找到增广路径为止。
算法的基本步骤如下:初始化,将所有顶点的标记值设为0,将匹配集合初始化为空。
寻找增广路径,从未匹配的顶点开始,依次尝试匹配与其相邻的未匹配顶点。
如果找到增广路径,则更新匹配集合;如果无法找到增广路径,则进行下一步。
修改标记值,如果无法找到增广路径,则通过修改标记值的方式,使得下次寻找增广路径时能够扩大匹配集合。
重复步骤2和步骤3,直到无法找到增广路径为止。
2. 算法优势:匈牙利算法具有以下优势:时间复杂度较低,匈牙利算法的时间复杂度为O(V^3),其中V是顶点的数量。
相比于其他解决最大化指派问题的算法,如线性规划算法,匈牙利算法具有更低的时间复杂度。
可以处理大规模问题,由于时间复杂度较低,匈牙利算法可以处理大规模的最大化指派问题,而不会因为问题规模的增加而导致计算时间大幅增加。
3. 算法应用:匈牙利算法在实际中有广泛的应用,例如:任务分配,在人力资源管理中,可以使用匈牙利算法将任务分配给员工,使得任务与员工之间的匹配最优。
项目分配,在项目管理中,可以使用匈牙利算法将项目分配给团队成员,以最大程度地提高团队成员与项目之间的匹配度。
资源调度,在物流调度中,可以使用匈牙利算法将货物分配给合适的运输车辆,使得货物与运输车辆之间的匹配最优。
4. 算法扩展:匈牙利算法也可以扩展到解决带权的最大化指派问题,即在二分图的边上赋予权重。
在这种情况下,匈牙利算法会寻找一个最优的匹配,使得匹配边的权重之和最大。
匈牙利法

6.9.2线性规划的求解方法——匈牙利法例:某建筑公司有五个工程队,现准备去五个工地作业,由于工程队的设备、人力各不相同,五个工地的条件也各不相同,因此每个工程队在不同的工地工作所需的作业时间也不相同,设每个工程队在每个工地工作的计划时间见表 6.9.1,安排哪个工程队去哪个工地进行作业,才能使企业作业的总时间最少。
各工程队在各工地的计划工作时间匈牙利法:步骤1,在系数矩阵C ij的每行和每列中减去最小元素,使矩阵的每行和每列至少有一个零元素。
步骤2,按零元素最少的行优先进行指派。
由于零元素所对应的分配关系所消耗的时间最少,故在零元素最少的行优先选择零元素并将其用○圈起,零元素一旦选定,则说明该工程队不能再在其他工地工作、也不能再安排其他工程队,故应划掉与该零元素同行和同列的其他零元素,按此法一直到进行不下去为止。
步骤3,如果选中的零元素个数与矩阵维数相同,则选中的零元素所对应的分配关系即是最优方案;如果选取中的零元素个数小于矩阵维数,则说明有的工程队未分配工作、有的工地未安排工程队。
因此需要进行调整,调整方法的思路为:找出与未分配工作工队有冲突的工队,通过对有冲突工队工作时间的比较,找出“次快”的工作时间,使其变为零元素,再进行分配。
其方法如下:①在无○号的行标√号。
②在有√号行上的零元素所在的列标√号。
③再在标√号的列中有○号的零元素所对应的行标√。
④重复直至进行不下去为止。
⑤对无√号的行和有√号的列画直线,在直线未复盖的元素中选择最小元素。
⑥从有√号的行中减去该元素,在有√号的列上加上该元素,则得到一个新矩阵。
方法中①~④的主要目的是找出有冲突的工队,标有√标记的行,是有冲突的工队;⑤、⑥是找出有冲突的工队中第二快(次块)的工时,并使其为零。
步骤4在此新矩阵的基础上重复第二步~第四步即可得出最优解。
整数线性规划

分枝定界法的理论基础:
1 2 k , i j (1) max cx max (max cx, max cx, , max cx)
x x1 x 2 x k
(2) 若 i j ,则 max cx max cx
xi xi x
分 枝
给定整数规划问题IP max z C T X
若x 的某个分量 xi 不是整数,
0
0
则将 IP分解为两个子问题
max z C X AX b X 0 X为整数向量 xi [ xi0 ]
T max z C X AX b X 0 X为整数向量 xi [ xi0 ] 1
记 z0 z
x1 4, x1 5
将问题B0分解为两个子问题B1和B2(分枝), 分别解B1,B2得 B1: x1=4, x2=2.10, z1=349 B2: x1=5, x2=1.57, z2=341
max z 40 x1 90 x2 max z 40 x1 90 x2 9 x1 7 x2 56 7 x 20 x 70 1 2 x1 4 B1 x1 , x2 0 9 x1 7 x2 56 7 x 20 x 70 1 2 x1 5 B2 x1 , x2 0
4、几点说明 (1)、如果要求目标的最大值
max z cij xij
令
bij M cij
i
j
其中
M max{ cij }
效率矩阵可变为B,将分配问题转换为一个极 小化问题
min z
'
b x
ij i j
ij
(2)、如果分配问题中,人员数 m 不等于工作数 n 时,可以类似于不平衡运输问题建立模型的 方法,增加虚拟人员或虚拟工作。
管理运筹学-复习整理
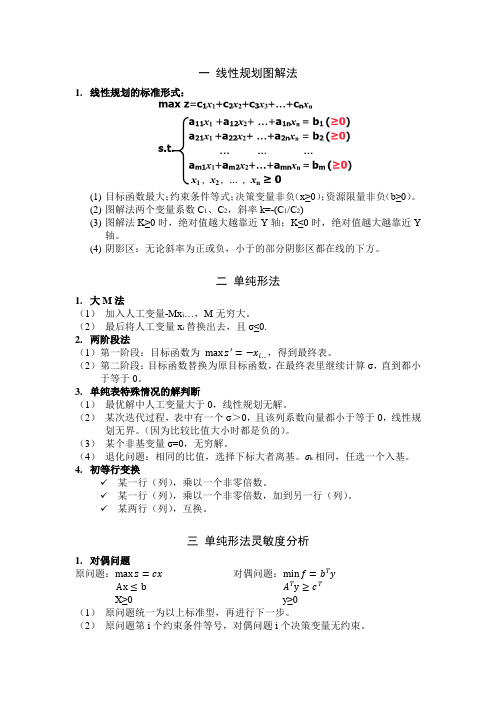
一线性规划图解法1.线性规划的标准形式:(1)目标函数最大;约束条件等式;决策变量非负(x≥0);资源限量非负(b≥0)。
(2)图解法两个变量系数C1、C2,斜率k=-(C1/C2)(3)图解法K≥0时,绝对值越大越靠近Y轴;K≤0时,绝对值越大越靠近Y轴。
(4)阴影区:无论斜率为正或负,小于的部分阴影区都在线的下方。
二单纯形法1.大M法(1)加入人工变量-Mx i…,M无穷大。
(2)最后将人工变量x i替换出去,且σ≤0.2.两阶段法(1)第一阶段:目标函数为max z′=−x i…,得到最终表。
(2)第二阶段:目标函数替换为原目标函数,在最终表里继续计算σ,直到都小于等于0。
3.单纯表特殊情况的解判断(1)最优解中人工变量大于0,线性规划无解。
(2)某次迭代过程,表中有一个σ>0,且该列系数向量都小于等于0,线性规划无界。
(因为比较比值大小时都是负的)。
(3)某个非基变量σ=0,无穷解。
(4)退化问题:相同的比值,选择下标大者离基。
σk相同,任选一个入基。
4.初等行变换✓某一行(列),乘以一个非零倍数。
✓某一行(列),乘以一个非零倍数,加到另一行(列)。
✓某两行(列),互换。
三单纯形法灵敏度分析1.对偶问题原问题:max z=cx对偶问题:min f=b T yAx≤b A T y≥c TX≥0 y≥0(1)原问题统一为以上标准型,再进行下一步。
(2)原问题第i个约束条件等号,对偶问题i个决策变量无约束。
(3)原问题第i个决策变量无约束,对偶问题第i个约束条件等号。
(4)原问题的对偶价格为对偶问题的最优解。
(参考习题册第7、19题)(5)对偶价格:常数项增加1单位,目标函数值改进的数量。
(6)影子价格:常数项增加1单位,目标函数值增加的数量。
2.灵敏度分析(1)目标函数变量系数C k:将C k直接代入最终表,判断σ是否小于0。
(2)约束方程常数项b:利用如下公式计算新的最终表中b值。
判断b是否非负。
第五章 匈牙利法与最佳指派问题

7 2 2
4
3
8 3 5 3
11 8
4
4 1 4
情况一出现,即得到了最优解,其相应的解矩阵为:
0 1 0 0 0
0 0 1 0 0
xij
1
0
0
0
0
0 0 0 1 0
0 0 0 0 1
由此得知最优指派方案为甲完成任务B,乙完成任务
C,丙完成任务A,丁完成任务D,戊完成任务E,最少时
间为
min z 7 6 7 6 6 32
而总的最少时间为32天.
当然,由于方法中的第二步4中的情况二的出现,造成 指派问题的最优解常常是不唯一的,但不同最优解的 最优值总是相同的.
第三节 非标准指派问题
前一节的匈牙利法只适用于目标函数为极小、价值 系数矩阵为方阵且价值系数矩阵中元素均为非负的情况。 当指派问题不满足上述三个条件时,就应先化成标准的 指派问题,然后再用匈牙利法求解.
解:
ABC DEF
甲 16 10 12 15 0 0 8 2
甲 16 10 12 15 0 0
8
2
乙 11 12 10 18 0 0 3 2 3
乙
11
12
10
18
0
0
3
2
3
丙 8 17 13 16 0 0 7 3 1
丙
8
17 13 16
0
0
7
3
1
8 10 10 15
本例经过反复的行、列检验后得到如下矩阵:
5 2 2
2
3
10 5 7 5
9
8
4
6 3 6 2
情况三出现,亦即未得到完全分配方案,求解过程 按以下步骤继续进行。
【高项第四版教材第21章】项目管理科学基础(运筹学计算)

3 最小生成树 如:改造路线最小长度方案 熟练掌握
4 匈牙利法 如:每人只能做一项任务,如何进行任务的分配 熟练掌握
5
最短(长)路径如:计算网络图最短路径;路径上最少花费;复杂图里计 问题 算最长路径、关键路径
6 网络与最大流量 如:最大运力计算 掌握
7 不确定决型策决论策:如乐等观可主能义、、后悲悔观值主准义则、等折;灵中敏主度义分、析
0.5
(1-2)联立,得X=3/0.11,66题的选项,排除。 (1-3)联立,得X=1140/45.5,67题的选项,排除。 (2-3)联立,得X=15 , Y=30
答案:66-A,67-C
假设从甲采购X吨,乙采购Y吨;则
( 1) ( 2)
( 3)
而所花费总价格(含运费)为 Z=2000x+2900y(万元),画出可行域, 此时,当直线过B(15,30)时,总费用最少,故每季度应从A处采购15万 吨,从B处采购30万吨,总费用为11700万元。
将X=2 , Y=0代入(300X+200Y)得最低成本为600万,第二问选择C选项。
方法2:公司需要研发2个A,4个B。因为甲可支持1个A和两个B,所以2个甲可以满足要求。成本600元。
四个成本选项600下面还有个400,400的组成只有两个乙,但是两个乙不满足要求。所以选甲乙分别为
2,0,成本是600。
题型2【动态规划】投资收益最大的问题
【例5-11下】某公司现有400 万元用于投资甲、乙、丙三个项目,投资额以百元为单 位, 知甲、乙、丙三项投资的可能方案及相应获得的收益如下表所示:
项目-收益-投资额
1
甲
4
乙
3
丙
5
2
3
4
运筹学 工作指派问题

n
n
n
n
ij
) xij
n n
= M ∑∑ xij − ∑∑ cij xij = nM − ∑∑ cij xij
i =1 j =1
14
1 甲 乙 丙 丁 10 5 5 2 2 9 8 4 3 3 7 7 6 4 4 8 7 5 5
12
例1-15 求最大效率问题
上海港务局装卸队安排五个班组进行五条作 业线的配工,以往各班组完成某项作业的实 际效率的具体数据如下表所示。
项目 班组 甲 乙 丙 丁 戊 400 435 505 495 450 315 295 370 310 320 220 240 320 250 310 120 220 200 180 190 145 160 165 135 100 13 1 2 3 4 5
9
(4)画0元素的最少覆盖线:要用最少的覆盖线将矩 阵表格中的所有0元素都覆盖住。如果覆盖线的条 数少于矩阵的阶数,说明找不到最优解,要转下 步(继续变换矩阵,使0元素增加)。如果覆盖线 的条数等于矩阵的阶数,则说明可以从矩阵表格 的0元素中找出最优解。 画最少覆盖线的具体方法: ①对没有◎的行打√; ②对打√的行中,所有有0元素的列打√; ③对打√的列中,对有◎的行打√; ④重复②、③步直到得不出新的打√的行和列; ⑤对没有打√的行画横线,对打√的列画纵线,这 些横线和纵线就是能把全部0元素都覆盖的最少覆 盖线。
第一章 线性规划的基本 理论及其应用
1
第九节
工作指派问题
工作指派问题是这样一类问题: 有n个人和n件事,已知第i个人做第j件事的 费用为 cij (i, j = 1, 2, , n),要求确定人和事之间的 一一对应的指派方案,使完成这n件事的总 费用最少。
项目管理匈牙利法
项目管理匈牙利法匈牙利法是一种有效的项目管理方法,它在项目规划、实施和监控过程中提供了清晰的框架和指导。
本文将介绍匈牙利法的定义、基本原则,以及在项目管理中的应用。
一、匈牙利法的定义匈牙利法(Hungarian notation)是由计算机科学家Charles Simonyi提出的一种命名规则,它的目的是为变量、常量和函数等命名提供规范。
匈牙利法的命名特点是在变量名前面加上前缀,该前缀表示该变量的数据类型或作用。
二、匈牙利法的基本原则1. 可读性:匈牙利法的前缀可以清晰地表达变量的类型或作用,提高代码的可读性和可维护性。
2. 一致性:匈牙利法要求在整个项目中保持一致的命名规则,避免混乱和不一致的命名方式。
3. 可扩展性:匈牙利法可以通过添加前缀来扩展变量的含义和作用,便于项目的发展和维护。
三、匈牙利法在项目管理中的应用1. 项目规划阶段:在项目规划阶段,匈牙利法可以用于命名项目中的不同组成部分,如项目名称、阶段名称、任务名称等。
通过使用一致的前缀命名规则,可以清晰地表达各个组成部分的作用和类型,方便项目团队的沟通和理解。
2. 项目实施阶段:在项目实施阶段,匈牙利法可以用于命名各个变量和参数,如成本变量、进度变量、风险变量等。
通过使用匈牙利法的命名规则,可以准确地描述变量的类型和作用,便于代码的编写和维护。
3. 项目监控阶段:在项目监控阶段,匈牙利法可以用于命名各个指标和报告,如成本指标、进度指标、风险报告等。
通过使用匈牙利法的命名规则,可以清晰地表达指标和报告的类型和用途,方便项目经理和其他相关人员进行监控和评估。
四、匈牙利法的优点和注意事项1. 优点:(1)提高代码的可读性和可维护性,减少开发和维护的难度;(2)促进团队成员之间的沟通和协作,减少误解和歧义;(3)减少错误和漏洞的发生,提高项目的质量和效率。
2. 注意事项:(1)匈牙利法要求在整个项目中保持一致的命名规则,需要进行规范和培训;(2)匈牙利法只是命名规则的一种方式,需要根据具体项目的需求和特点进行调整和变化;(3)匈牙利法不是万能的,需要结合其他项目管理方法和工具进行综合应用。
线性规划例题5分配问题及匈牙利算法

直角坐标系。 • (2)对每个约束(包括非负约束)条件,
先取其等式在坐标系中作出直线,通过
判断确定不等式所决定的半平面。各约束半 平面交出来的区域(存在或不存在),若存在, 其中的点表示的解称为此线性规划的可行解。 这些符合约束限制的点集合,称为可行集或 可行域。
同时,我们有一个追求目标,即获
取最大利润。于是可写出目标函数z
为相应的生产计划可以获得的总利
润:z=40x1+30x2 +50x3
【解】设x1、x2、x3 分别为甲、乙、丙三种产品 的产量数学模型为:
mZ a 4 x x 1 0 3x 2 0 5x 3 0
3 x1 x 2 2 x3 200
问:如何分配,能使所需的 总时间最少?
人 工作 甲 乙 丙 丁
译英文 2 10 译日文 15 4 译德文 13 14 译俄文 4 15
97 14 8 16 11 13 9
1.1 数学模型 Mathematical Model
线性规划(Linear Programming,缩写为LP)是运筹学的重 要分支之一,在实际中应用得较广泛,其方法也较成熟, 借助计算机,使得计算更方便,应用领域更广泛和深入。
怎样辨别一个模型是线性规划模型?其特征是: 1.解决问题的目标函数是多个决策变量的线性函 数,通常是求最大值或 最小值; 2.解决问题的约束条件是一组多个决策变量 的线 性不等式或等式。
书本还例举了诸如合理用料问题;配料问题;投资问题;均衡配 套生产问题等.
• 线性规划的一般模型
max(min)Z c1x1 c2 x2 L cn xn
6
x 1 0 、 x 2 0
第2章 求解线性规划方法 (单纯形法+匈牙利法)
x3=2-x1+x4-x6 (13) 13) 14) x7=1+2x1―x2―2x4+x5+2x6 (14)
S=4x1+3x2+8x3+Mx6+Mx7=min(8)
第 二 次 判 定 S=4x1+3x2+8(2-x1+x4-x6 )+Mx6+ M(1+2x1―x2―2x4+x5+2x6) (2M- (3-M)x (8-2M)x =(2M-4)x1+(3-M)x2+(8-2M)x4+ (3M- 16) Mx5+(3M-8)x6+16 (16) 16)式可见x 的系数为负 由(16)式可见x2、x4的系数为负, 因此X(1)不是最优解。 因此X 不是最优解。
x3=2-x1+x4-x6 (13) 13) 14) x7=5-x2-2x3+x5=1+2x1―x2―2x4+x5+2x6 (14)
由(14)式得: 14)式得: 1/2+ /2+ /2+ 18) x4=1/2+x1-x2/2+x5/2+x6-x7/2 (18) 由(13)、(18)式: 13)、(18) )、(18 5/2- /2+ /219) x3=5/2-x2/2+x5/2-x7/2 (19) 求解(18)、(19)式得: )、(19 令x1=x2=x5=x6=x7=0, 求解(18)、(19)式得: x3=5/2 20) (20)是基础可行解 x4=1/2 得到了新的顶点X 得到了新的顶点X(2)=(0,0,5/2,1/2,0,0,0)T
(4- (3- 因为M为无限大值,所以(4 因为M为无限大值,所以(4-M)x1 、 (3-M)x2 、 (8- 负值, 不是最优解。 (8-3M)x3是负值, S(X(0))不是最优解。
4. 换元 A、原则
将目标函数S 系数为负且最小的元换入( 将目标函数S中系数为负且最小的元换入(本例为 的元换入 (8- ),作为基本变量。 作为基本变量 (8-3M)x3),作为基本变量。 计算各约束条件式中比值: 计算各约束条件式中比值: 第 一 次 换 元
2019年线性规划和匈牙利法.doc

二、生产任务分配的匈牙利法在实际的生产管理工作中,常会遇到这样的问题,就是如何根据生产作业汁划将不同任务在不同的工人(或班组)之间分配,使完成任务总的消耗时间或费用最小。
解决这类问题的简便而有效的方法是匈牙利法,它是由匈牙利数学家D. Konig所提出。
例有4项任务A、B、C、D,分别由甲、乙、丙、丁4个人去完成,规定每人承担其中一项任务,不同的人完成同一任务所花时间(h)不同,见表3-3,求如何分配,使完成这4项任务的总时间最小。
匈牙利法求解此问题的步骤是:1)按表3-3列出矩阵2)将矩阵作行、列约简:首先进行行约简。
在矩阵的每一行中选取最小元素,然后将该行的各元素都减去此数,得到如下新矩阵行约简是比较一名工人担任不同任务时所花的时间,各行中减去最小值后的时间表示该工人担任其它任务时,所多花费的时间,每行中的“0”表示该工人承担这项任务最有利。
然后将经过行约筒后的矩阵中没有“0”的列再进行约简,即从该列中选出最小元素,并将其它元素减去此数,得到新矩阵列约简是比较一项任务有不同工人承担所托时间,各列中减去最小值后的时间表示任务由其他工人担任时,所多花费的时间,每列中的“0”表示这项任务由该工人承担最有利。
3) 检验是否已得最优分配方案;作零的覆盖线,即对有“0”的行和列,划上一条覆盖线,能覆盖所有零元素的最少覆盖线数称为维数,当覆盖线的维数等于矩阵阶数时,可知已得最优分配方案,若维数小于阶数,再作调整。
本例可用三条覆盖线覆盖住所有零元素,维数是3,矩阵的阶数是4,维数不等于阶数,因此矩阵还必须调整。
4) 矩阵的调整。
在上述矩阵中.有三种元素,一种是无线覆盖元素,另一种是单线覆盖元素,还有一种是双线覆盖元素。
在无线覆荒元素中找出最小值,本例为“1”,将无线覆盖得元素都减去“1”,而双线覆盖的元素加上“1”,单线覆盖的元素不变。
这样得到新矩阵5) 再检验——作覆盖线,方法与步骤3相同。
现在的最少覆盖线数为4,与矩阵阶数相等,可知已能进行最优分配。
运筹学匈牙利法PPT课件
(1)人数与工作数不等的处理 当人数>工作数时:假想工作数,使得
与人数能够匹配, 对应的效率设定为0值。
当工作数>人数时:假想人数,使得与 工作数能够匹配, 对应的效率设定为0值。
人数和工作数不等的指派问题
4 8 7 15
12 9 2 14
6 9 12 8
11 7 17 6
6 9 12 10
运筹学匈牙利法
一、0-1 整数规划——枚举法
x1 . x2. x3
( 0. 0. 0 ) ( 0. 0. 1 ) ( 0. 1. 0 ) ( 1. 0. 0 ) ( 0. 1. 1 ) ( 1. 0. 1 ) ( 1. 1. 0 ) ( 1. 1. 1 )
满足约束条件(是∨ 否×) Z 值
(1) (2) (3) (4)
思考:如果将目标 函数变为下式会改 进吗?
max Z 2x2 3x1 5x3
三、指派问题的匈牙利法
指派问题(The Assignment Problem)
1、指派问题的形式表述
给定了一系列所要完成的任务(tasks)以及一系列完成 任务的被指派者(assignees),所需要解决的问题就是 要确定出哪一个人被指派进行哪一项任务
译日文:
44
min f
cij xij译德文:
i 1 j 1
译俄文:
工作 人 甲 乙 丙 丁 甲:
乙:
译英文 2 10 9
7 丙:
译日文 15 4 译德文 13 14
14 8 丁:
16 11
x21+ x22 + x23 + x24 =1 x31+ x32 + x33 + x34 =1 x41+ x42 + x43 + x44 =1 x11+ x21 + x31 + x41 =1 x12+ x22 + x32 + x42 =1 x13+ x23 + x33 + x43 =1 x14+ x24 + x34 + x44 =1
匈牙利法的基本步骤

匈牙利法是一种用于求解线性规划问题的算法,其基本步骤如下:
1. 将线性规划问题转化为标准形式,即目标函数为最大化或最小化,约束条件为等式或不等式。
2. 构建一个成本矩阵,其中每行代表一个约束条件,每列代表一个变量。
3. 对成本矩阵进行行和列的减操作,使得每行和每列至少有一个零元素。
4. 选择一个零元素最少的行或列,用该行或列中的零元素覆盖其他行或列中的零元素。
5. 重复步骤 4,直到所有零元素都被覆盖。
6. 对于每个被覆盖的零元素,将其对应的变量标记为已分配。
7. 对于未被分配的变量,选择一个成本最小的变量,并将其分配给一个未被覆盖的零元素。
8. 重复步骤 7,直到所有变量都被分配。
9. 计算目标函数的值,并检查是否满足约束条件。
如果满足,则得到最优解;如果不满足,则需要重新选择分配变量。
匈牙利法是一种简单而有效的线性规划算法,但对于大规模问题可能会比较耗时。
在实际应用中,通常会使用更高效的算法来求解线性规划问题。
运筹学基本概念及判断题(含答案)
运筹学基本概念及判断题(含答案)第1章线性规划1.任何线性规划一定有最优解。
2.若线性规划有最优解,则一定有基本最优解。
3.线性规划可行域无界,则具有无界解。
4.在基本可行解中非基变量一定为零。
5.检验数λj表示非基变量xj增加一个单位时目标函数值的改变量。
7.可行解集非空时,则在极点上至少有一点达到最优值。
8.任何线性规划都可以化为下列标准形式:9.基本解对应的基是可行基。
10.任何线性规划总可用大M单纯形法求解。
11.任何线性规划总可用两阶段单纯形法求解。
12.若线性规划存在两个不同的最优解,则必有无穷个最优解。
13.两阶段法中第一阶段问题必有最优解。
14.两阶段法中第一阶段问题最优解中基变量全部非人工变量,则原问题有最优解。
15.人工变量一旦出基就不会再进基。
16.普通单纯形法比值规则失效说明问题无界。
17.最小比值规则是保证从一个可行基得到另一个可行基。
18.将检验数表示为的形式,则求极大值问题时基可行解是最优解的充要条件是。
19.若矩阵B为一可行基,则|B|=0。
20.当最优解中存在为零的基变量时,则线性规划具有多重最优解。
第2章线性规划的对偶理论21.原问题第i个约束是“≤”约束,则对偶变量yi≥0。
22.互为对偶问题,或者同时都有最优解,或者同时都无最优解。
23.原问题有多重解,对偶问题也有多重解。
24.对偶问题有可行解,原问题无可行解,则对偶问题具有无界解。
25.原问题无最优解,则对偶问题无可行解。
26.设X*、Y*分别是的可行解,则有(1)CX*≤Y*b;(2)CX*是w的上界(3)当X*、Y*为最优解时,CX*=Y*b;(4)当CX*=Y*b时,有 Y*Xs+Ys X*=0成立(5)X*为最优解且B是最优基时,则Y*=CBB-1是最优解;(6)松弛变量Ys的检验数是λs,则 X=-λS是基本解,若Ys是最优解,则X=-λS是最优解。
第5章运输与指派问题61.运输问题中用位势法求得的检验数不唯一。
匈牙利算法 描述

匈牙利算法描述
摘要:
1.匈牙利算法简介
2.匈牙利算法的应用背景
3.匈牙利算法的基本思想
4.匈牙利算法的实现步骤
5.匈牙利算法的优缺点分析
6.结论
正文:
匈牙利算法是一种解决匈牙利问题的图论算法,也被称为Munkres算法。
它主要用于解决最大匹配问题和最小生成树问题。
匈牙利算法在运筹学、计算机科学、通信网络等领域具有广泛的应用背景。
匈牙利算法的基本思想是:通过不断地寻找增广路径来寻找最大匹配。
增广路径是指一条从已匹配顶点出发,到达未匹配顶点的路径。
算法的基本流程如下:
1.初始化未匹配顶点和已匹配顶点集合。
2.遍历所有未匹配顶点,找到一条增广路径。
3.将增广路径上的所有顶点标记为已匹配。
4.重复步骤2和3,直到找不到增广路径为止。
匈牙利算法的实现步骤如下:
1.初始化一个长度与顶点数相同的数组,用于记录每个顶点所在的连通分
量。
2.遍历所有边,对于每条边,如果两个顶点不在同一连通分量,则将它们合并到同一个连通分量中。
3.遍历所有顶点,如果一个顶点所在的连通分量只有一个顶点,则将其标记为已匹配。
4.重复步骤3,直到找不到未匹配顶点为止。
匈牙利算法的优缺点分析:
优点:
1.匈牙利算法的时间复杂度为O(nm),其中n和m分别为顶点数和边数。
2.匈牙利算法可以保证找到最大匹配。
缺点:
1.匈牙利算法需要额外的存储空间来记录顶点所在的连通分量。
2.匈牙利算法不能保证找到最优解,因为可能存在多个最大匹配。
匈牙利解法

匈牙利解法1. 什么是匈牙利解法匈牙利解法,又被称为马尔科夫链匈牙利算法,是一种用于求解带权二部图最优的数学算法,该算法是Hungarianmathematician D.Kőnig在1930年发表的,是组合优化领域里最著名的算法之一,引起了众多数学家重视。
2. 匈牙利解法的基本概念简单地说,匈牙利解法可以把求解最优匹配的问题转换成一个线性规划问题,根据求出的最优值,可以得出最大权重的匹配方案。
匈牙利解法的核心思想是将人和工作、机器和工序之间的捆绑情况视为一个矩阵,根据权重进行分析。
解决矩阵匹配问题的方法就是在较小的花销下找出一个最优的权重,并使用这个最优的权重来进行匹配,从而实现满足要求的任务。
3. 匈牙利解法的主要步骤(1)确定矩阵尺寸:根据需要建立一个矩阵,由需要匹配的两组元素来构成,将矩阵中的每一元素都赋有相应的能力值,并确定矩阵的尺寸。
(2)确定最小权重:对矩阵的每一行,求出其中的最小值,并从该行中减去它;同样的,求出每一列的最小值,并从该列中减去它。
(3)求出最小权重:经过上述操作后,得出的矩阵里的元素,就是权重的最小值。
(4)得出最优结果:根据得到的最小权重值,来构建一个二部图,即使用一列最小值来匹配另一列,使得总权重最小。
4. 应用匈牙利解法可以用来解决很多实际上的问题,例如以最少花费排派最多的人,把人和机器配对,最终得到一个最优的解决方案;可以用来测定一篇文章中两个语料库之间的最大重合度,以及字频排序等。
匈牙利解法也可以用于最小距离网络流等问题,所以它是一种十分灵活且有效的数学计算算法。
管理运筹学 易错判断题整理

× 5 如果运输问题或者转运问题模型中,Cij 都是产地i到销地j的最小 运输费用,则运输问题同转运问题将得到相同的最优解。
√
第三章:目标规划
主要内容: 1 描述目标规划建模的思路以及他的数学模型同一般线性 数学模型的相同和不同点。 2 解释下列变量:1正负偏差变量 2绝对约束和目标约束 3 优先因子与权系数。 3 目标规划图解法的步骤。 4 目标规划 目标函数特点。 判断题: 1 目标规划模型中,可以不含有绝对约束但是必须含有目 标约束。
第一章:线性规划及单纯形法
2.1单纯形法和两阶段法大M法 主要内容
1 线性规划数学模型的结构及各要素的特征。 2 求解线性规划时可能出现哪几种结果。 3 叙述线性规划问题的可行解、基解、基可行解、最优解 的概念及上述解之间的关系。
4 单纯性法的计算步骤,如何在单纯性表中判别问题是具 有唯一最优解、无穷多最优解、无界解。
√ 4 动态规划的基本方程保证各阶段内决策的独立进行,可以不考虑这之前和之后 决策的如何进行。
√
第六章:网络规划
主要内容:
6.1 1 通常用G=(v,e)表示一个图,试描述符号V,E及表达式的含义。 2 解释下列名词,说明区别。1 端点,相邻,关联边, 2 环,多重边,简单图 3链,初等链 4. 圈,初等圈,简单圈。 5.回路,初等路6.节点的次,悬挂点,悬挂边,孤立点 7. 连通图,连通分图 ,支撑子图8. 有向图,基础图,赋权图 3 描述树,图的支撑树,最小支撑树的概念。 4 描述Dijkstra算法的基本思想和步骤。 5 最大流问题是线性规划问题,说明其线性形式。 6 什么是增光链,为什么不存在关于可行流f的增广链,就是最大流。 7截集,截量以及最大流最小截量定理。 8 最小费用最大流的概念。
整数规划解法-匈牙利 算法部分
max Z=CX
maxZ=CX (B) AX=b X 0
AX=b
(A) X 0
X为整数 (B)为(A)的松弛问题。
3
(2)替代问题的求解 max Z=CX
(B)
AX=b X 0
采用相应的方法(如图解法)求解出替代问题的 最优解,观察其是否满足整数解的要求。如其最 优解就为整数,则结束;如含有分数,则需要进 行分支定界操作。
实际含义:从事情的角度来考虑,表示此事分配给此人效率最高。
24
min
步骤二:继续产生零元素 方法:再找出矩阵每列的最小元素,再分 别从各列中减去它。
0 8 7 5 0 8 11 0 10 4 11 0 2 3 5 0 2 3 0 11 9 5 0 11
31
问
题
2 5 (0) 8 11 (0) 5 4 2 3 (0) 0 0 11 4 5
只能对三个零元素进行标定(代表独立的零 元素只有三个),后续如何操作?
32
非直观法-步骤3(第一种情形)
(3) 重复(1)、(2)两个步骤,可能出现三种 情况: ① 效率矩阵每行都有一个打( )号的零元 素,很显然,按上述步骤得到的打( )号 的零元素都位于不同行不同列,只要令 对应打( )号零元素对应的决策变量xij=1 就找到了问题的最优解;
人
从人的 角度看 从任务 角度看
工作 译成英文 译成日文 译成德文 译成俄文
甲 2 15 13 4
乙 10 4 14 15
丙 9 14 16 13
丁 7 8 11 9
12
指派问题的一般模型
假设: [aij]表示指派问题的效率矩阵 xij表示决策变量,决策变量的取值:
线性规划和匈牙利法.doc
一、线性规划l 线性规划的含义和数学模型的建立线性规划(Linear Programming)就是在一定的约束条件下,寻求某一个目标函数的最大值或最小值,以求取最优方案的一种规划方法。
在生产管理中运用线性规划时,首先要把所要解决的实际问题.如投资问题、计划安排问题、下料问题、运输问题、库存问题等,经过归纳和整理,建立数学模型,然后用相应的方法求出模型的最优解。
线性规划模型由两部分组成:目标函数和约束条件。
建立模型的步骤是:首先明确目标函数,即确定该生产问题所追求的目标,如利润、产量、成本等,和它所对应的决策变量,建立以决策变量表示的线性函数式。
当追求的目标是经济效果时,在函数式前冠以max ,这就是极大化问题;当追求的目标是资源消耗时,在函数式前冠以min ,这就是极小化问题。
其次建立为实现目标函数所需满足的各种约束条件,如设备、原材料、劳动力、能源的使用限制等,并以线性等式或不等式表示。
现举例说明线性规划模型的建立。
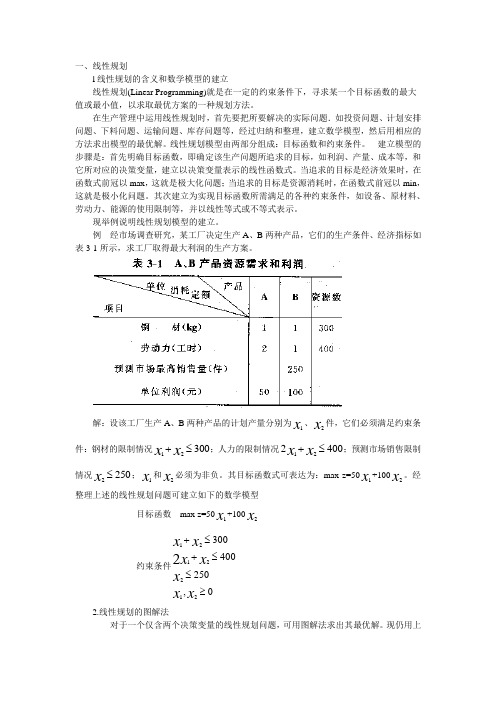
例 经市场调查研究,某工厂决定生产A 、B 两种产品,它们的生产条件、经济指标如表3-1所示,求工厂取得最大利润的生产方案。
解:设该工厂生产A 、B 两种产品的计划产量分别为x 1、x 2件,它们必须满足约束条件:钢材的限制情况30021≤+x x ;人力的限制情况400221≤+x x ;预测市场销售限制情况2502≤x ;x 1和x 2必须为非负。
其目标函数式可表达为:max z=50x 1+100x 2。
经整理上述的线性规划问题可建立如下的数学模型目标函数 max z=50x 1+100x 2约束条件0,25040030021221212≥≤≤+≤+x x xx x x x 2.线性规划的图解法对于一个仅含两个决策变量的线性规划问题,可用图解法求出其最优解。
现仍用上侧介绍具体求法。
首先,在平面图形上建立以x 1为横轴、x 2为纵轴的直角坐标系,因为线性规划数学模型中要求所有变量为非负数,因此只有在直角坐标系的第一象限的坐标点才有实际意义。
线性规划与计算复杂性简介
在一般n维空间中,要直接得出多胞形“顶点”概念还有一些困难。在图8.1中顶点可以看成为边界直线的交点,但这一几何概念的推广在一般n维空间中的几何意义并不十分直观。
定义8.1 称n 维空间中的区域R为一凸集,若x1 , x2 ∈ R及 λ∈(0, 1),有λ x1 +(1-λ)x2 ∈ R。
例1的数学模型:设该厂生产x1台甲机床和x2台乙机床时总利润最大,则 x1 、x2应满足
例8.2 min S.t i=1,…,m xj≥0,j=1,…,n
线性规划的目标函数可以是求最大值,也可以是求最小值,约束条件可以是不等式也可以是等式,变量可以有非负要求也可以没有非负要求(称这样的变量为自由变量)。为了避免这种由于形式多样性而带来的不便,规定线性规划的标准形式为
(1)可行域R可能会出现多种情况。R可能是空集也可能是非空集合,当R非空时,它必定是若干个半平面的交集( 除非遇到空间维数的退化)。R既可能是有界区域,也可能是无界区域。(2)在R非空时,线性规划既可以存在有限最优解,也可以不存在有限最优解(其目标函数值无界)。(3)若线性规划存在有限最优解,则必可找到具有最优目标函数值的可行域R的“顶点”。
在线性规划的求解中,下列定理起了关键性的作用。在这里,我们不加证明地引入这些定理。。
定理8.1 (基本可行解与极点的等价定理) 设A为一个秩为m的m×n矩阵(n>m)b为m维列向量,记R为(8.3)的可行域。则x为R的极点的充分必要条件为 x 是 的基本可行解。 定理8.1既提供了求可行域R的极点的代数方法,又指明了线性规划可行域R的极点至多只有有限个.
设B为一非退化的可行基,x=(B-1b,0)为其对应的基本可行解。现在,我们先来讨论如何判别x0是否为最优解。为此,考察任一可行解 。由Ax=b可得(8.5)代入目标函数,得到
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、生产任务分配的匈牙利法
在实际的生产管理工作中,常会遇到这样的问题,就是如何根据生产作业汁划将不同任务在不同的工人(或班组)之间分配,使完成任务总的消耗时间或费用最小。
解决这类问题的简便而有效的方法是匈牙利法,它是由匈牙利数学家D. Konig所提出。
例有4项任务A、B、C、D,分别由甲、乙、丙、丁4个人去完成,规定每人承担其中一项任务,不同的人完成同一任务所花时间(h)不同,见表3-3,求如何分配,使完成这4项任务的总时间最小。
匈牙利法求解此问题的步骤是:
1)按表3-3列出矩阵
2)将矩阵作行、列约简:首先进行行约简。
在矩阵的每一行中选取最小元素,
然后将该行的各元素都减去此数,得到如下新矩阵
行约简是比较一名工人担任不同任务时所花的时间,各行中减去最小值后的时间表示该工人担任其它任务时,所多花费的时间,每行中的“0”表示该工人承担这项任务最有利。
然后将经过行约筒后的矩阵中没有“0”的列再进行约简,即从该列中选出最小元素,并将其它元素减去此数,得到新矩阵
列约简是比较一项任务有不同工人承担所托时间,各列中减去最小值后的时间表示任务由其他工人担任时,所多花费的时间,每列中的“0”表示这项任务由该工人承担最有利。
3) 检验是否已得最优分配方案;作零的覆盖线,即对有“0”的行和列,划上一条覆盖线,能覆盖所有零元素的最少覆盖线数称为维数,当覆盖线的维数等于矩阵阶数时,可知已得最优分配方案,若维数小于阶数,再作调整。
本例可用三条覆盖线覆盖住所有零元素,维数是3,矩阵的阶数是4,维数不等于阶数,因此矩阵还必须调整。
4) 矩阵的调整。
在上述矩阵中.有三种元素,一种是无线覆盖元素,另一种是单线覆盖元素,还有一种是双线覆盖元素。
在无线覆荒元素中找出最小值,本例为“1”,将无线覆盖得元素都减去“1”,而双线覆盖的元素加上“1”,单线覆盖的元素不变。
这样得到新矩阵
5) 再检验——作覆盖线,方法与步骤3相同。
现在的最少覆盖线数为4,与矩阵阶数相等,可知已能进行最优分配。
6) 确定最优分配方案。
进行具体分配时,可以对只有一个零元素的列(行)先分配(记√号),分配后,划去与该零元素同行(列)的其他零元素(记×号)这样依改做完各列(行),得到分配结果。
如果矩阵能通过直接观察找到位于不同行不同列的零元素,那么就可以直接确定分配方案。
最优分配方案:甲——D,乙——B,丙——A,丁——C。
总消耗工时为:Z=7+5+4+5=21 (h)。