西门子数字汽轮机控制器
SIEMENS T-XP系列SIMADYN D汽机调节器特点浅论
20 ,7 2)3 — 4 0 7 2 ( :3 3 .
( 责任编辑 : 王永胜 )
Hale Waihona Puke [ ] 戴 荣海. 6 集成 电路 产业含氟 废水 处理 T程 [ ] J. 环境 工程 ,0 7 2 20 .5
( ) 2 — 0 1 :9 3 .
第 一 作 者 简 介 : 克 彬 , ,9 2年 生 ,9 7年 毕 业 于西 北 纺 织 _ 蒋 男 17 19 丁学
主要有 日 本i菱 . 美国贝利 、 国阿尔斯通 、 法 美国西屋 、 德国两f 子等。 1 这
些 系统 在控制思想 、 件设 汁 、 备应用 等方面都代 表了世界 控制 系 软硬 设 统发展的先进方向, 自有其独特的特点。 各
1 系统 介绍
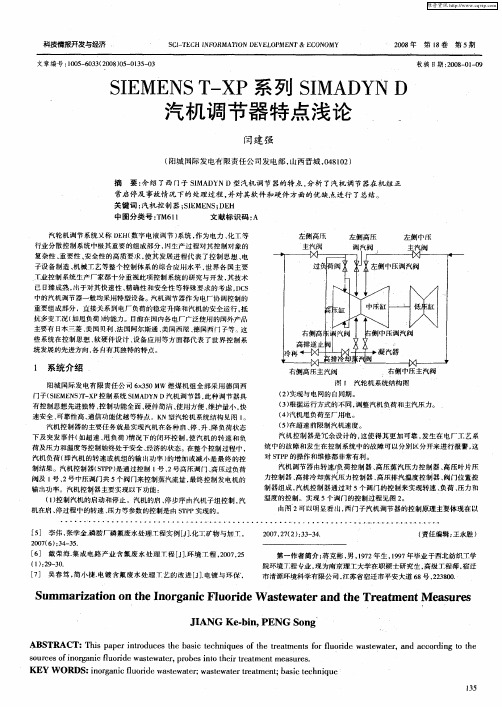
阳城 国际发 电有限责任公 司 6 3 0MW 燃煤机 组全部采刚 德 国两 x5 门子(I ME S r x SE N )- P控制系统 SMA Y r I D N D汽机调节器 , 此种调节器具 有控制思想先进独特 、 控制功 能全 面 、 硬件 简沽 、 蹦方便 、 使 维护量小 . 快 速安全 、 可靠性高、 通信功能优越等特点 。K N型汽轮机系统结构见网 l 。 汽机控制器的主要任务就是实现汽机在各种肩 、 、 、 停 升 降负荷状态 下及 突发 事件( 如超速 、 负荷 ) 甩 情况下 的闭环 控制 , 使汽机 的转速 和负 荷及F 力和温度等控制始终处于安全、 匠 经济 的状态 。在整个控制过程巾, 汽机负荷 ( 即汽机的转速或机组 的输 出功率 ) 的增加 或减小是 最终 的控 制结果 。汽机控制器(T P) S P 是通过控制 l 、 号 2号高压调门、 压过负荷 高 阀及 l 、 号 2号巾压渊门共 5个阀 门来控制蒸汽流量 , 最终 控制发 电机的 输 出功率 。汽机控制器主要文现 以下功能 :
西门子V94.3A燃气轮机控制器作用机理及结构特点

西门子V94.3A燃气轮机控制器作用机理及结构特点黄瑜,崔红星(郑州燃气发电有限公司,河南郑州450001)摘要:本文就该型燃气轮机为例,简单分析一下其主要控制器的特点及在机组启动、运行、停机和保护中的作用。
关键词:燃气轮机西门子控制器中图分类号:TM57文献标识码:B文章编号:X(2007)01-062-03WorkingMechanismandStructureCharacteristicsofSiemensV94.3AGasTurbineControllerHuangYu,CuiHong-xing(ZhengzhouGasTurbineGeneratorCo.Ltd,Zhengzhou450001,China)Abstract:Thisarticlemakesthisstyleofgasturbinesasanexampleandsimplyanalyzesitsmaincontroller'scharacteristicsandfunctionduringthestartingup,operation,shutdownandprotectionoftheplant.Keywords:gasturbine;Siemens;controller燃气轮机有其自身的特点在不同的阶段不同的工况下需要不同功能的控制器。
在郑州2×390MW燃机项目中,燃气轮机主要设置了启动升速控制器、速度/负荷控制器、极限负荷控制器、压气机压比极限控制器和冷却空气极限值控制器。
1启动升速控制器郑州燃机项目的燃气轮机用启动变频器升速,直至由压气机产生的空气质量流量和由启动升速控制器调节的燃料流量达到足够的数量,足以使透平能够在它自己的功率下实现加速为止。
因此,启动升速控制器用来把燃气轮机的受控启动速度提升到额定的速度。
只有当速度达到预先设定的数值时,燃气轮机才能启动。
在这一启动过程中使用不同的梯率(变化率),梯度的大小取决于选用的燃料以及是正常启动还是黑启动。
02-T3000系统在火电厂西门子汽轮机控制中的应用
Abstract:T3000 svstem used in the contml system of Siemens l 000 MW steam turbine in Jianbi Power Plant is
introduced. Combined with the practical engineering, the con69uration of DEH systems of steam turbines is presented,and the 713000 system in turbine contml implementation of ETS functions,system data communication and ATC functions are explained.In the end,the issues occured in the engineering installation and debugging pmcess of
文献标识码:A
文章编号:1672—5549(2012)03一0236一04
Application of T3000 System in Turbine Control for Power Plant
HAN X沲ng (Guodian Jianbi Power Plant,Zhenjiang 212006,China)
T3000 system are summerized. With view of the commissioning and operation of DEH system,T3000 system applied
for controlling the steam turbine accurately can satisfy aU requirements of steaIIl turbine.
上汽西门子汽轮机控制及调试问题简析

上汽西门子汽轮机控制及调试问题简析王强;赵彩霞;唐文岩;柴王胤【摘要】随着数字电液控制技术的发展,其功能和控制的可靠性得到了完善和提高.该技术能够有效避免非计划停运事故的发生.着重介绍了上汽西门子数字电液控制系统调试与运行中存在的问题及优化措施,内容包括汽轮机调节器的转速/负荷控制器、压力控制器、高排温度控制器、轴封控制、甩负荷及调门快关等.希望梳理的结果对电厂的优化运行和从事相关工作的人员有所帮助.【期刊名称】《热力透平》【年(卷),期】2017(046)004【总页数】5页(P288-292)【关键词】转速/负荷控制器;压力控制器;轴封压力控制;甩负荷【作者】王强;赵彩霞;唐文岩;柴王胤【作者单位】安徽新力电业科技咨询有限责任公司,合肥230022;安徽新力电业科技咨询有限责任公司,合肥230022;安徽新力电业科技咨询有限责任公司,合肥230022;安徽新力电业科技咨询有限责任公司,合肥230022【正文语种】中文【中图分类】TK264.2数字电液控制系统(DEH)逻辑集成性强,各种模拟量、开关量切换条件较多,系统结构复杂。
及时发现DEH运行中的问题能为运行人员争取到解决问题的宝贵时间,因此热工人员对DEH逻辑的熟悉程度,很大程度上决定了解决和处理问题的效率。
上汽西门子汽轮机先进可靠的控制理念及运行的安全性得到了用户的一致肯定,但在实际运行中仍需要不断优化。
相关科研院所与电厂单位根据机组实际运行情况,征求上海汽轮机厂(上汽厂)意见后进行了部分改进,控制效果良好。
对于一些共性问题,如极热态启动时高排温度高,轴封压力、温度控制波动大,汽轮机甩负荷、调门快关等问题,文中将给出优化处理方案。
本文根据实际机组调试期间遇到的问题展开分析,有效解决了相关问题,对同类型机组有一定的借鉴意义。
上汽厂应用于ovation系统的DEH逻辑高度集成于4个控制站中,它们分别为drop41、drop42、drop43和drop44。
西门子HMN型660MW汽轮机控制系统子组简析

环节 和步序 , 方便运行操作人员快速掌握汽轮机子组 , 而保障机组安全 、 从 顺利启 动。
关键 词 : 汽轮机子组 ; 准则 ; 冲转 ; 网 并 中图分类号 :K2 3 7 T 6 . 文献标志码 : B 文章编号 :6 4—15 (0 2 0 05 — 3 17 9 1 2 1 )7— 0 1 0
第3 4卷 第 7期
21 0 2年 7 月
华 电 技 术
Hu d a e h oo y a in T c n l g
Vo . 4 No 7 13 .
J 12 2 u. 01
西 门子 H MN型 6 0MW 汽 轮 机 控 制 6 系 统 子 组 简 析
田军 让
( 江苏 国信靖 江发 电有 限公 司 , 江苏 靖 江 2 4 1 ) 15 3
西 门 子 汽 轮 机 子组 可 自动 判 断 出汽 轮 机 的冷 态、 温态 、 态和 极 热态 , 热 可依 据 汽 轮 机所 处 的状 态 对 汽轮 机启 动时 需 满 足 的参 数 、 暖机 时 间 等 做 出具
体要求。汽轮机状态判断是 以高压转子温度来区分 的, 高速旋转 的转子温度无法直接测量 , 而是根据高 压 内缸 10 0 %温度测点来计算 高压转 子温度 , 若轴 温度高于 40 , 0 ℃ 则认为是热态启动 , 要求 主蒸汽质
收 稿 日期 : 1 0 2 2— 2—2 0 8
主蒸 汽 门前 主蒸 汽 温 度 都 高 于 40o X 准 则 4 C, 满足 。
机组 在冷 态启 动时 , 要求 主 、 热 汽 温为 30~ 再 8
基于T3000系统的西门子汽轮机DEH控制策略优化

263理论研究1 引言 某电厂1×1000MW汽轮机组是上海汽轮机厂引进西门子技术生产的N1000-28/600/620型超超临界、一次中间再热、单轴、四缸四排汽、凝汽式汽轮机。
机组配置2个高主阀、2个高调阀、2个中主阀、2个中调阀及1个补汽阀。
汽轮机数字电液控制系统(DEH)与紧急停机系统(ETS)为软、硬件一体化设计,控制系统为SPPA-T3000,采用西门子汽轮机控制策略,在实现最短启动时间和最高可用性的经济要求的同时又保证了汽轮机的安全可靠。
但是,由于西门子DEH控制系统是按照标准的模块设计的,对机组、设备、系统的要求很高,为了充分发挥西门子DEH控制系统的性能优势,必须结合实际,因地制宜的进行一些改进,以提高机组的安全性和经济性。
本文从报警功能、阀门控制等方面进行分析,并提出了相关建议,以供参考。
2 加强重要设备的运行状态监视 DEH系统采用冗余化与分散布置相结合的设计方式,确保设备故障对整个系统的影响最小,设备故障不易察觉。
因此,应将220VAC电源、交直流转换器、各路模件电源、电磁阀电源等重要设备的状态监视接入控制系统,并设置报警。
应增加DEH重要测点异常报警,包括冗余测点偏差越限、速率变化过快、超量程、断线、阀门指令反馈偏差大、服务器异常、硬件故障、GPS时钟异常、网络或交换机异常等,及时发现并处理异常事件。
3 阀门快关保护的逻辑优化 该系统设计有诸多条件触发进汽阀门关闭。
其中一项为,阀门流量指令比实际阀门的流量小25%以上触发快关,直接打开遮断阀,关闭阀门。
此种情况在转速/负荷控制器输出大幅振荡,或LVDT反馈大幅往上跳变时发生。
这项保护用于防止并网前转速失控,并网后触发该项保护极易引发调节系统失控,存在安全风险。
对此,可在该项保护中增加“未并网”信号、转速超过额定值等限制条件,防止非转速失控情况下误动作,导致异常扩大。
4 阀门管理曲线优化 高调门开度高于65%以后,调节能力较弱[1], 此时应开启补汽阀辅助调节,但考虑到补汽阀开启后对热耗及机组振动带来的负面影响,补汽阀处于强制关闭或限开度投入状态,与原设计存在较大偏差[2]。
350MW西门子汽轮机快速启动中热应力控制特点

350MW西门子汽轮机快速启动中热应力控制特点
胡捷;方鹏
【期刊名称】《宝钢技术》
【年(卷),期】2011(000)001
【摘要】宝钢电厂4号发电机组使用的是西门子350 MW SST5-5000型凝汽式汽轮机.该汽轮机运用组级程序自动控制、人为断点辅助判断的方式,实现了各初参数下从盘车到并网全过程的快速自动化启动,在自动化程度和启动效率方面达到了国内领先水平.着重对西门子汽轮机的X准则和汽轮机热应力估算器进行分析,总结出西门子汽轮机自动化启动中热应力控制特点及其具体的实现方法,可为国内发电企业汽轮机实现自动化启动提供参考.
【总页数】5页(P44-48)
【作者】胡捷;方鹏
【作者单位】宝山钢铁股份有限公司电厂,上海,200941;宝山钢铁股份有限公司电厂,上海,200941
【正文语种】中文
【中图分类】TK267
【相关文献】
1.浅谈西门子660MW汽轮机快速启动 [J], 蔡西忠
2.浅谈西门子660MW汽轮机快速启动 [J], 蔡西忠;
3.西门子350MW汽轮机低压外上缸组合及焊接变形控制 [J], 任骞;王强;马小震
4.西门子350MW汽轮机振动故障分析及处理 [J], 卢利军
5.西门子350MW汽轮机振动故障分析及处理 [J], 卢利军
因版权原因,仅展示原文概要,查看原文内容请购买。
西门子T-XP DEH系统
• 汽轮机的调节采用节流调节。高、中压汽 汽轮机的调节采用节流调节。 轮机分别设置有两个蒸汽调节阀, 轮机分别设置有两个蒸汽调节阀,用来调 节进入汽轮机的蒸汽量。 节进入汽轮机的蒸汽量。 • 该机组的汽轮机控制系统由数字汽轮机控 制器(DTC)、汽轮机应力估算器 制器 、汽轮机应力估算器(TSE)、电 、 子保护系统(EPS)和汽轮机跳闸系统 和汽轮机跳闸系统(TTS) 子保护系统 和汽轮机跳闸系统 等组成。 等组成。
• (4)DTC能够接受来自汽轮机应力估算器 能够接受来自汽轮机应力估算器TSE 能够接受来自汽轮机应力估算器 的限制信号,保证汽轮机在启动、升负荷、 的限制信号,保证汽轮机在启动、升负荷、 降负荷时的热应力控制在允许的范围内。 降负荷时的热应力控制在允许的范围内。 • (5) DTC可由以 可由以CRT为基础的操作和监视系统 可由以 为基础的操作和监视系统 OM进行操作和监视。 进行操作和监视。 进行操作和监视 • DTC使用的是冗余结构的快速响应数字系统 使用的是冗余结构的快速响应数字系统 AS620T,AS620T。系统是为汽轮发电机组 , 。 的快速闭环控制系统设计的。 的快速闭环控制系统设计的。AS620T自动处 自动处 理系统由APT和与它相连的一个 组成,如 和与它相连的一个AP组成 理系统由 和与它相连的一个 组成, 所示。 图10-23所示。 所示
• 从测量得到的温度和仿真计算得到的温度可 以获得温差, 以获得温差,这些温差与允许的材料应力值 对应的温差进行比较,得到温度裕量, 对应的温差进行比较,得到温度裕量,各个 不同部件的温度裕量的最小值作为非稳态操 作时的参考变量。该参考变量被送到与DTC 作时的参考变量。该参考变量被送到与 相关的设定值控制器中, 相关的设定值控制器中,通过限制转速变化 率、负荷变化率使机组的应力限制在一个允 许的范围内。除此之外, 许的范围内。除此之外,还可按照汽轮机的 热力工况而产生各种极限值作为连续准则(x热力工况而产生各种极限值作为连续准则 准则)去自动控制汽轮机的启动;还可根据汽 准则 去自动控制汽轮机的启动; 去自动控制汽轮机的启动 轮机部件的当前温度裕量确定最佳主蒸汽/ 轮机部件的当前温度裕量确定最佳主蒸汽/ 再热蒸汽温度目标设定值。 再热蒸汽温度目标设定值。
西门子SGT5-4000F型燃机启动及转速负荷控制解析
西门子SGT5-4000F型燃机启动及转速负荷控制解析许淼; 周长德; 吴尚泽【期刊名称】《《东北电力技术》》【年(卷),期】2019(040)009【总页数】4页(P59-62)【关键词】启动控制器; 转速负荷控制器; 控制逻辑; 转速设定值; 负荷设定值【作者】许淼; 周长德; 吴尚泽【作者单位】辽宁东科电力有限公司辽宁沈阳 110179【正文语种】中文【中图分类】TM343孟加拉古拉绍电厂7号机组燃气-蒸汽联合循环300~450 MW工程采用多轴联合循环机组,其中1台燃气轮机,1台余热锅炉,1台蒸汽轮机。
燃机既可单循环运行,也可联合循环运行。
燃机主燃料是天然气,备用燃料是轻柴油。
燃机采用西门子SGT5-4000F型重型燃气轮机,余热锅炉由韩国斗山(DOOSAN)锅炉厂生产,蒸汽轮机为东方汽轮机厂生产的LN126.9-11.11/565/565型(合缸)三压、一次中间再热、双缸双排汽、双抽凝汽式联合循环用汽轮机。
燃气轮机操作所需的控制、监控、保护、诊断和报警功能由过程控制系统 SPPA-T3000 提供[1]。
1 燃气轮机模拟量控制系统燃气轮机模拟量控制系统是燃气轮机控制的重要部分,主要由启动升速控制器、转速负荷控制器、排气温度控制器、负荷限制控制器和压气机压比极限控制器组成,这些控制器由RAK0F最小选择功能块进行选择控制,即燃机在不同运行工况时,燃料量输出YMIN指令是这5个控制器输出的最小值[2]。
燃气轮机点火启动后,通过启动控制器来控制燃机转速,当达到额定转速时,切换至转速负荷控制器,维持额定转速,准备并网。
并网运行时,负荷控制器中的转速控制退出,切换到负荷控制,当功率增加到一定程度,排气温度达到温控标准,IGV阀开度达到最大值,排气温度控制器启动。
负荷限制控制器和压气机压比极限控制器只有在特殊工况下时才会启动。
2 控制逻辑解析2.1 值班阀和预混阀2.1.1 值班阀控制孟加拉古拉绍电厂7号机组燃气轮机设计了2个值班阀,在燃机升速时,值班阀是主要控制对象,在并网升负荷时,值班阀起稳燃作用,开度受压气机入口温度和排气温度影响,由开环回路控制。
T3000系统在火电厂西门子汽轮机控制中的应用

Ap l a in o 3 0 y t m n Tu b n n r l o o r P a t p i t fT 0 0 S se i r i e Co to r P we l n c o f
HAN a g Xin
( o i i b P we l tZ e j n 10 6 Ch a Gu d nJ n i o r a ,h ni g2 2 0 , i ) a a P n a n
汽轮机数 字电液控制 系统 ( E 的构成 , D H) 并对 T 0 0系统在 汽轮机控制 中危急遮 断 系统 ( T ) 能的 实现 、 30 ES功 系统的数 据通讯 以及 自启停功能的应用进行 了说明 , 最后对 1 00系统在 工程 安装调试过程 中遇到 的问题 进 30
行 总 结 。 从谏 壁发 电厂 1 0 0MW 机 组 D H 系统 调 试 及 运 行 情 况 来 看 , 00 系统 对 汽轮 机 的精 确 控 制 , 很 0 E 1 0 3 能
3 0 0 s se a e s mme ie .Wi iw f h o 3 0 y tm r u r d z t v e o e c mmiso i ga d o e ai n o h t sin n n p r t f o DEH s se y t m,T 0 0 s se a p id 3 0 y t m p l e frc nr l n h ta t r i e a c r tl a a i y al e u r me t o t a t r ie o o t l g t e s m u b n c u aey c n s t f l r q i oi e s e n s fse m u b n .
Ke y wor ds:
近 年来 , 机 百 万级 大 容量 火 电厂 的建设 方 单
塔式光热西门子进口汽轮机ATC功能解析

塔式光热西门子进口汽轮机ATC功能解析发布时间:2022-12-09T06:01:30.647Z 来源:《当代电力文化》2022年第14期作者:郑建林[导读] 本文主要介绍某塔式光热电站引进西门子技术生产的进口汽轮机ATC控制系统郑建林中国绿发投资集团有限公司青海分公司西宁 810000摘要:本文主要介绍某塔式光热电站引进西门子技术生产的进口汽轮机ATC控制系统,该系统真正实现了汽轮机的自启动功能,将汽轮机的热应力计算应用于汽轮机启停的整个过程控制当中,充分体现了西门子光热汽轮机控制上的优越性。
关键词: DEH 控制 ATC 自启动热应力0.前言塔式光热发电机组是利用布置于地面的定日镜将太阳光反射并聚积到位于塔顶的吸热器上,吸热器将聚积的太阳辐射能转变为热能,加热内部的传热熔盐,达到一定温度后,通过管道输送到地面,存储于高温熔盐储罐,发电时高温熔盐通过热盐泵输送至蒸汽发生器与汽轮机给水进行热交换,产生高压过热蒸汽推动汽轮发电机组发电。
汽轮机数字式电液DEH控制系统,是目前电站汽轮机普遍采用的控制装置,它主要完成机组在启停及正常运行过程中对汽轮机转速和功率的控制功能,汽轮机的超速保护功能,以及对汽轮机的进汽和排汽参数、缸温、轴承温度及转速、发电机功率等重要参数的监视。
ATC是汽轮机自启动控制,根据汽轮机的运行参数和热应力计算,通过控制DEH,使汽轮机从盘车开始直到带初负荷按程序实现自启动。
它主要完成机组在启停及正常运行过程中对汽轮机转速和功率的控制功能,汽轮机的超速保护功能,以及对汽轮机的进汽和排汽参数、缸温、轴承温度及转速、发电机功率等重要参数的监视。
该系统将润滑油系统、EH油系统、轴封系统、疏水系统、抽气系统及机组的报警保护整合一体。
实现汽轮机的自动启停及正常运行中自动控制及保护。
把机组的热应力控制在安全的范围,保证机组的安全及寿命要求。
1.西门子进口汽轮机控制系统概况某塔式光热电站汽轮机采用冲动式汽轮机组,发电机中置,一端连接高压缸,另一端连接中低压缸;采用直接空冷排汽系统。
DEH控制系统讲义

DEH控制系统讲义1.概述DEH系统为汽轮机数字电液控制系统,控制系统主要任务就是以计算机为核心,以高压抗燃油为执行动力,通过控制汽轮机各个进汽阀门的电液伺服阀,达到控制汽机的启动、停止、转速控制及负荷控制,达到安全稳定运行的目的。
DEH主要由计算机控制部分与液压控制部分(EH)组成。
DEH部分完成控制逻辑、算法及人机接口。
根据对汽轮发电机各种参数的数据采集,通过一定的控制策略,最终输出到阀门的控制指令通过EH系统驱动阀门,完成对机组的控制。
某公司2×600MW机组汽轮机控制系统采用西门子公司生产的PCS7系统的PLC进行组态,CPU型号为S7-417H,该系统有独立的工程师站,正常时在DCS上通过通讯进行控制,当DCS异常或通讯故障时可以使用DEH工程师站实现对汽轮机的控制。
2.硬件设备2.1.电源模件220V交流电源通过SITOP电源变成24V直流电送至电源模件。
其电源模件有两个,冗余工作。
每个电源模件配两个3.6V锂电池,防止突然断电时程序丢失。
2.2.CPU模件DEH系统使用的是S7-417H型CPU,沧东电厂其他三处使用PCS7系统的地方:MEH,循环水,ETS都使用的是S7-414H型CPU,相比414型CPU来说,417型的处理速度更快,内存容量也更大。
CPU也是冗余配置,正常工作时只有一个处于工作位置,另一个处于备用位置,但同时监视互连的通讯总线数据,一旦发现工作的CPU故障,备用CPU马上自动启动,这从一定程度上避免了由于硬件故障导致的系统瘫痪。
2.3.通讯模件CP443-1是连接DEH控制器和工业以态网的通讯卡件,用一根双绞线连接到TXP的工厂总线OSM的端口上,使用TCP-IP协议进行通讯I/O层机架上的通讯卡件IM153-2实现CPU和I/O机架的通讯,使用Profibus-DP协议进行通讯。
2.4.FM458模件上述三种模件在PCS7系统中是通用的,而FM458模件为DEH所特有的,我们可以称之为伺服模件,在这个模件中主要运行的是DEH系统的闭环控制逻辑,即控制10个液控调门的逻辑。
汽机控制器相关介绍(附英文注释)

汽机控制器相关介绍(附英文注释)汽机控制器是DEH的核心部分,它接受启动装置,转速设定,应力控制,遥控负荷,负荷设定,最大负荷,升速率,主汽压力的指令与限制。
同时通过改变主汽阀和调节汽阀的位置,从而改变机组进汽量,完成对汽轮机的转速及负荷实时控制,还可以参与电网一次调频、同步并网、甩负荷控制功能。
西门子汽轮机还可以实现真正意义上的汽轮机自启动,完全可以做到一键启机。
下面就汽机控制器相关功能做简要介绍:TAB启动装置:启动装置实际上是一个设定值调整器,它不仅能根据设定值的不同,巧妙地对汽机进行复置,而且还具备保护功能。
启动装置提供一个模拟量信号去一个低选逻辑。
在起动前,当遮断信号释放时,启动装置将阀位信号置零,保证调节阀可靠关闭。
在起动时起动装置的信号开始升高,使转速控制器进行转速控制,当汽机达到正常速度,并且发电机已同步,起动装置设定在100%位置,这样TAB 启动装置控制器信号不再受限制。
功率负荷不平衡控制功能动作原理:当发电机负荷瞬间减少(变化率大于32.2%/10 ms)且发电机功率与机械功率的差值大于40%额定负荷时功率负荷不平衡控制动作, 通过CV的快关电磁阀( FASV)将CV 快速关闭,以抑制汽机超速,在触发条件消失后,功率负荷不平衡信号将保持3s后复位,CV的快关电磁阀失电,调门重新开启。
高压压力控制器:高压压力控制器用于控制主蒸汽压力。
控制方式分限压控制和初压控制两种。
限压方式一般用于炉跟踪,一方面可在主蒸汽压力下降到极限值时限制汽机负荷,使压力不致下降太多,另一方面也可充分利用锅炉蓄能,保证机组负荷稳定。
而初压方式一般用于机跟踪运行方式,它调整主蒸汽压力,使其压力保持稳定,但负荷波动量较大。
转速负荷控制器:转速负荷控制器是汽机控制器的核心,在并网前机组启动阶段,转速负荷控制器控制汽机升速,并在临界转速区对缸温、轴温及升速率进行控制,使转速大于一定值,同时还接受应力的指令,进行升速率限制,保证温度裕度大于允许温度30摄氏度,从而维持机组顺利升转速至额定转速。
西门子T3000及DEH简介

压力模式选择
限压动作指示
TAB
外部负荷设定子环 最大负荷设定
压力模式选择
阀位限制功能(POSN LIMIT):通常在手动状 态,可设定阀限。启
动前须手动设定阀限 到105% A蒸汽T品T质时、机组跳闸、超 速保护动作时阀限自 动状态,无法切手动。
限压动作指示
当阀位信号失效时, 阀门将缓慢关闭。
高压缸叶片温度与转子温度函数关系:
415 400
530 515
500
460
高压TA叶B 片压力控制器: 高压叶片压力控制器用于限制高压缸进汽压
力或者高压缸的排汽压力(高压缸背蒸汽压品质 高,则 相应的饱和温度升高),防止凝结换热(过大 的汽化潜热)释放导致汽轮机进汽部件产生过 大的热应力。在暖机及升速期间,高压叶片压 力保护激活后,高压调门被节流,汽轮机只能 通过进一步开大中压调门控制升速,此时暖机 速度较慢;当汽轮机转速大于396 rpm后,高压 叶片压力外部负控荷设制定子器环 自动解除控制。冲转前再热汽 压力不宜太高。
甩负荷信号LAWLONG发出后,机组切至转速控制器带负荷运行方式(带转速控制 器的负荷运行方式LBNR)带厂用电运行,由操作员设置目标转速从而达到控制功率的目 最大负荷设的定.甩负荷前期的DEH处理就是负荷瞬时中断后所做的处理.唯一的区别在于,甩负荷 LAWLONG认为负荷已中断不可能恢复,因此在甩负荷识别时间2S过后,发出甩负荷信号 LAWLO压N力G模后式选,转择 速负荷控制器成为在转速调节器作用下的带负荷运行,此时控制根据转 速偏差换算得出的目标负荷与实际负荷的偏差.换言之,在电网故障消除后,DEH不会自 动恢复到事故前工况,只能维持机组在LAW后的状态.若机组未与电网解列,运行人员可 以通过设定目标转速来改变机组出限压力动作.设指示置目标转速(根据转速不等率),升负荷或降 负荷. 在机组与电网并上网以后可以在画面上(三期无)切换带负荷运行方式,将DEH 切至在负荷调节器作用下带负荷运行,重新设置目标负荷来恢复机组出力.
660 MW西门子汽轮机组自启动控制策略及实现

660 MW西门子汽轮机组自启动控制策略及实现秦爱民;张涢【摘要】通过对西门子汽轮机组控制系统、X准则和汽轮机热应力估算器的介绍,阐述了华能邯峰发电厂660 MW汽轮机自启动的核心控制策略以及具体的实现方法.这对于我国同类型还不能实现自启动的汽轮机具有学习和借鉴价值.【期刊名称】《河北电力技术》【年(卷),期】2006(025)006【总页数】4页(P36-39)【关键词】汽轮机;X准则;热应力;温度裕量【作者】秦爱民;张涢【作者单位】华能铜川电厂,陕西,铜川,727000;西柏坡发电有限责任公司,河北,平山,050400【正文语种】中文【中图分类】TK26华能邯峰发电厂(简称“邯峰电厂”)的2台660 MW西门子汽轮机组,现在无论冷态还是热态,已经实现了从盘车到并网全过程的自动执行,实现了真正的一键启动。
汽轮机的启动就是暖管、暖阀、暖机的过程,即在冲车过程中避免不合格蒸汽进入汽轮机,在升温过程中不发生因为温升不合理而导致的阀门、管道、汽轮机缸体设备的损坏或缩短设备寿命。
我国现在大部分汽轮机组要想达到上述的控制目的,都是汽轮机运行人员依据经验人为判断控制实现,不但费时费力而且很不可靠,时有发生因误判断导致的设备损坏事故。
邯峰电厂2台机组投产以来,汽轮机冷热态启动30多次,从未发生过因暖管、暖阀、暖机不当而造成的延误机组启动或设备损坏事故,实践证明西门子的汽轮机自启动全过程控制是相当成功的。
下面就西门子是如何具体实现这种控制进行详细剖析。
1 汽轮机组的控制西门子汽轮机组的控制由三部分组成:T-XP(DCS)系统、SIMADYN D(DEH)系统和S595-F(TTS)系统。
其中SIMADYN D负责汽轮机转速、负荷控制;S595-F负责汽轮机的跳闸系统;T-XP负责汽轮机本体及附属热力系统的各种参数监测、过程控制,是三大系统的核心系统,汽轮机自启动子组、汽轮机热应力估算器、负责协调三大系统状态的软件包——启动装置都在T-XP系统中实现。
西门子重型燃气轮机排气温度控制策略解析

西门子重型燃气轮机排气温度控制策略解析许淼;张立颖;吴尚泽;周长德【摘要】西门子燃气轮机的自动化程度非常高,基本实现了一键启动及全程自动控制,为了让热控检修人员及电厂相关运行操作人员对西门子重型燃气轮机排气温度控制方式有更多了解,以孟加拉国古拉绍电厂燃气—蒸汽联合循环365 MW工程7号机组西门子SGT5-4000F型燃气轮机为例,通过绘制排气温度设定值、排气温度OTC控制器和IGV控制器等逻辑简图,对燃气轮机排气温度控制策略进行详细解析,并给出排气温度的修正补偿公式,为同类型机组在调试、运行及检修等方面提供借鉴.【期刊名称】《东北电力技术》【年(卷),期】2018(039)009【总页数】3页(P29-31)【关键词】SGT5-4000F;排气温度控制;控制逻辑;控制策略;设定值【作者】许淼;张立颖;吴尚泽;周长德【作者单位】辽宁东科电力有限公司, 辽宁沈阳 110179;国网辽宁省电力有限公司电力科学研究院, 辽宁沈阳 110006;辽宁东科电力有限公司, 辽宁沈阳 110179;辽宁东科电力有限公司, 辽宁沈阳 110179【正文语种】中文【中图分类】TK477孟加拉国古拉绍电厂7号机组燃气—蒸汽联合循环365 MW工程采用多轴联合循环机组,其中包括1台燃气轮机,1台余热锅炉,1台蒸汽轮机。
燃机既可单循环运行,也可联合循环运行。
燃机主燃料是天然气,备用燃料是轻柴油,采用西门子SGT5-4000F型重型燃气轮机,余热锅炉由韩国斗山(DOOSAN)锅炉厂生产,蒸汽轮机为东方汽轮机厂有限责任公司生产的LN126.9-11.11/565/565型(合缸)三压、一次中间再热、双缸双排汽、双抽凝汽式联合循环用汽轮机。
燃气轮机操作所需的控制、监控、保护、诊断和报警功能由过程控制系统SPPA-T3000提供。
1 燃气轮机排气温度控制受制造工艺及高温限制,燃烧室内的温度不能直接被测量,所以要通过修正后的排气温度(OTC)来间接控制燃烧室内温度。
西门子二次再热机组限压/初压切换过程典型故障分析
t h e s wi t c h i n g p r o c e s s o f l i mi t p r e s s u r e/i n i t i a l p r e s s u r e i n d e b u g g i n g a r e a n a l y z e d a n d s o l v i n g me a s u r e s a r e p r o p o s e d w h i c h p r o v i d e
( 神华 周华广投 ( 北海)发电有限公司 ,广西 北海 5 3 6 0 0 0 )
摘要: 国电泰州 电厂二 次再热汽轮机数字 电液伺 服控 制系统 ( D E H) 采用西 门子公 司的T 3 0 0 0 控制系统 。在调试过程 中发
现汽 轮机 在限压, 初压切换过程 中容 易 现问题 , 而西门子 T 3 0 0 0 系统全部采用 内部模 块模 式 , 检修人员对 限压/ 初压控制及无
Q I N N i n g ,R E N Z h o n g h a i ,D I N G Y o n g ,B I A N Z e n a n
( S h e n h u a G u o h u a G u a n g t o u ( B e i h a i )P o w e r G e n e r a t i o n C o . ,L t d . , G u a n g x i B e i h a i 5 3 6 0 0 0 , C h i n a )
s e c o n d a r y r e h e a t t u r b i n e i n G u o d i a n T a i z h o u P o w e r P l a n t . Du in r g t h e d e b u g g i n g p r o c e s s i t w a s f o u n d t h a t p r o b l e ms we r e e a s i l y a r i s e n d u r i n g t h e l i mi t p r e s s u r e/i n i t i a l p r e s s u r e s wi t c h i n g p r o c e s s o f t u r b i n e . Be c a u s e i n t e r n a l mo d u l e mo d e s a r e a l l a d o p t e d i n S i e me n s T 3 0 0 0 s y s t e m, ma i n t e n a n c e p e r s o n n e l a r e n o t e a s y t o ma s t e r p in r c i p l e s o f t h e l i mi t p r e s s u r e/i n i t i a l p r e s s u r e c o n t r o l a n d t h e c a r e f r e e s wi t c h . T h e c o n t r o l me t h o d a n d s wi t c h i n g p r i n c i p l e o f t h e l i mi t p r e s s u r e/ i n i t i a l p r e s s u r e c o n t r o l l e r a r e i n t r o d u c e d . T y p i c a l f a u l t s d u i r n g
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图11-13
• DTC主要由转速/负荷调节器、高压蒸汽 压力调节器、高压叶片温度调节器、高压 叶片压力调节器、位置调节器等组成。 DTC能够实现汽轮机的启停时的转速控制、 同期并网、负荷控制、参加一次调频、汽 轮机超速前的转速控制、甩负荷时维持厂 用电运行等功能。
• DTC是一种电液控制系统,控制功能由计 算机完成,控制阀的操纵力由液压产生。 主控制器按照运行方式的要求,实施过程 自动调节,并保证合适的升速率或负荷变 化率,使之与运行方式相匹配。
• (一)转速信号的测量及处理
• 1.转速信号的测量
• 汽轮机转速由安装在汽轮机轴周围的电感 式传感器测量。传感器的输出信号为矩形 波频率信号,频率值与齿轮盘上恒定的凹 槽数及转速成正比。齿轮盘上的齿轮数确 定后,传感器的输出与汽轮机转速成单值 的正比关系。
• 三个转速测量值NT1、NT2、NT3在汽轮机 保护系统DTSZ的外部电子设备中处理后直 接送入汽轮机调节器的NT处理模件。 NT 处理模件如图11-14所示。
• (二)延时转速设定值的形成
• 延时转速设定值在设定值形成模件NS中产 生。
• 此外,设定值控制器还接收来自TSE的限 制信号,以修正它的输出,在启动过程中 保证汽轮机不超出允许的热应力范围,同 时还允许汽轮发电机以最大允许的升速率 运行。速度控制器采用PI(比例一积分)运算 规律,这样可以精确控制升速阶段的转速 值。一旦汽轮发电机组并网,速度控制器 就能转换为PI作用的负荷控制器。速度控 制器的输出经处理后送到各阀门的位置控 制器,来改变各阀门的开度,实现转速的 闭环调节。
• 如果第二通道也故障,则转换到第三通道, 同时转速测量2故障信号STNT2送到OM系 统。若备选转速测量通道故障,则只有该 通道故障信号至OM系统。
• 对实际转速NT求微分,可得出实际转速的 变化率。
• 为了模拟电网频率扰动,可附加一个特殊 功能到实际转速输出值。引发电网频率扰 动的指令、变化率大小及持续时间可由频 率变化仿真模块STFCH给出。
图11-14
• 图11-14转速处理模件NT
• 在转速信号处理模件NT中,对三个测量信 号进行监视并进行三选一处理,被选中的 三个测量值之一如NT1就作为汽轮机实际转 速测量值NT,再通过一个滤波器,滤除高 频干扰。滤波后的转速NT作为实际转速值。
• 如果实际转速测量的第一通道发生故障, 选择器会立刻识别出,并且不间断地转换 到第二通道,同时转速测量1故障信号 STNT1送到OM系统。
转速设定值不断减小,从而使机组实际转
速不断减小。当没有应力评估器故障WTS 信号时,信号ANFABR通过与门输出转速 加速度太低NTGRKL信号,并送到OM系统 和汽轮机开环控制系统DTS。
• 当机组转速不在临界转速区时,C1=0, C2=0,可以通过OM系统发出释放转速设 定值调节器SWFQ信号,此时使SR触发器 的复位输入端为“1”信号,而置位输入端 为“0”信号,从而触发器复位, ANFABR=0,使机组启动继续进行。
• 当NT的值远大于GSP2A的值且NT的值小 于GSP2E的值时,C2=1,表明机组转速在 第二临界转速区;
• 如果机组转速不在临界转速区,即C1=0, C2=0,则C1+C2=0,此时有汽轮机转速离 开振动临界转速NTASP信号产生,并将此 信号送到转速设定值形成模件NS。
• 如果机组转速在临界转速区,即C1=1或 C2=1,当实际转速的变化率低于转速变化 率监视极限值GNTGRD,或是有汽轮机应 力评估器故障WTS信号时,将使SR触发器 的置位输入端为“1”信号,使触发器置位, 通过或门输出中断启动ANFABR信号。该 信号送到转速没定值形成模件NS作和监视系统 OM进行操作和监视。
• 一、转速控制系统
• 汽轮机速度控制的目的是满足汽轮发电机 组在启动和电网同步过程中的转速控制要 求。速度控制由设定值调节器、设定值控 制器和速度控制器构成。速度设定值由设 定值调节器决定,通常是由FGC自动操作 的,其他速度调整的输入来自自动协调器 和OM系统的手动操作。速度设定值信号是 设定值控制器的输入信号,设定值控制器 决定了速度的变化率,并向速度控制器输 出一个延时的设定值信号。
• 2.临界转速处理
• 在启动阶段,机组转速应尽可能快地通过 特定的临界转速区,以保护叶片不受共振 引起的损坏。机组的临界转速区有两个: (GSP1A,GSP1E)和(GSP2A,GSP2E), 将实际转速与临界转速区的上、下限比较, 就可判断机组转速是否处于临界转速区。
• 当NT的值大于GSP1A的值且NT的值小于 GSP1E的值时,C1=1,表明机组转速在第 一临界转速区;
西门子数字汽轮机控制器
• 数字汽轮机控制器(DTC)的功能是在所 有工况下通过汽轮机调节阀调整进入汽轮 机的蒸汽量,从而实现对机组转速、负荷、 压力的调节。根据机组不同的工作阶段和 不同的运行方式,选择不同调节器的输出 为阀门控制回路的指令,通过阀门位置控 制器、电液伺服阀、油动机来改变阀门的 开度,从而改变进入汽轮机的蒸汽量,使 机组的实际参数和给定值相一致,数字汽 轮机控制器的典型结构如图11-13所示。
• DTC中的设定值控制、开环控制和监视功 能,使汽轮发电机组始终保持最佳的运行 状态,尽量避免保护装置动作而造成停机。 这极大地提高了汽轮发电机组的可用率, 通过系统的冗余设计保证了DTC运行的高 可靠性。
• DTC的特点如下:
• (1)在所有的运行阶段,如汽轮机启动、停 机、并网运行、独立运行等阶段, DTC均 能保证稳定运行。
• (2)DTC能适应发电机解列时的全甩负荷。
• (3)DTC具有一次调频功能,这一功能使机组 具有线性功频静态特性。调频特性的增益和死 区可根据电网的需要分别设定;调频功能可以 从主控制室投入或切除。
• (4)DTC能够接受来自汽轮机应力估算器TSE 的限制信号,保证汽轮机在启动、升负荷、降 负荷时的热应力控制在允许的范围内。