自动操舵仪
基于虚拟仪器的自动操舵仪教学系统研究
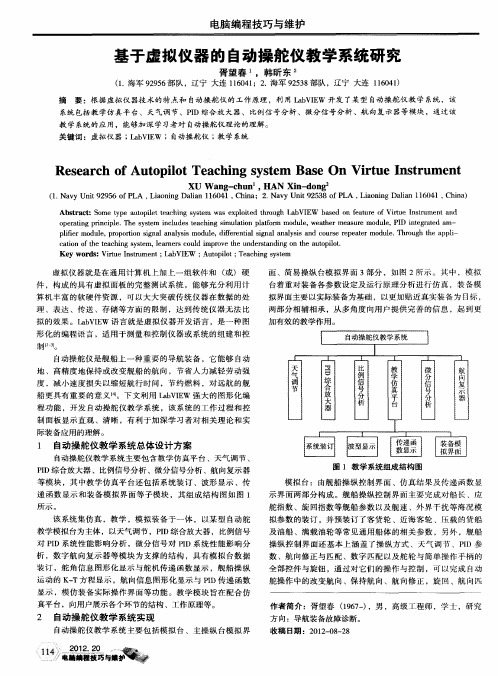
虚拟仪器 就是在通 用计算 机上加 上一组软 件和 ( 或)硬 件 ,构成 的具有 虚拟面板 的完整测试 系统 。能够充 分利用计 算机 丰富 的软硬 件资源 ,可 以大大 突破传统 仪器在 数据 的处 理 、表达 、传送 、存储等 方面 的限制 ,达 到传 统仪 器无法 比 拟 的效果 。L b IW 语 言就是虚拟仪 器开发语 言 ,是一种 图 a VE 形化 的编程语 言 ,适用 于测量 和控 制仪器 或系统 的组建 和控
析 ,数字航 向复示器 等模块 为支撑 的结 构 ,具 有模拟 台数据 装 订 ,舵角 信息 图形 化显示 与舵机传递 函数显示 ,舰船 操纵
数 、航 向修正与 匹配、数字 匹配 以及舵 轮与简单 操作 手柄 的 全部控件 与旋钮 ,通 过对它们 的操作与 控制 ,可 以完 成 自动 舵操作 中的改变航 向 、保持航 向 、航 向修正 ,旋 回 、航向 匹 作者简 介 :胥 望春 (9 7 ) 16 一 ,男 ,高级 工程师 ,学士 ,研 究 方 向:导航装 备故 障诊断 。
所示 。
图 1 教 学 系统 组成纵控制界 面 、仿 真结果及 传递 函数显 示界面两 部分构成 。舰 船操纵控 制界面 主要完成 对船 长 、应
舵指数 、旋 回指数等舰 船参数 以及舰速 、外 界干 扰等海 况模
拟参数 的装订 ,并预装 订 了客货 轮 、近海 客轮 、压载 的货船 及油船 、满载油轮 等常见通用船 体 的相 关参数 ,另外 ,舰船
步 安 排 一 个 略 为 综 合 的活 动 项 目 ,以 此 来 考 察 学 生 的 “ 战 ” 实
DC-IIIS型自动操舵仪使用说明书
DC-ⅢS型自动操舵仪使用说明书上海航海仪器责任公司2011年5月DC-ⅢS自动操舵仪使用说明书技术责任会签单编制:校对:标审:审核:质量会签:审定:批准:目录1. 概述------------------------------------------------------------------------------------------- 32. 主要技术参数------------------------------------------------------------------------------- 33. 系统组成------------------------------------------------------------------------------------- 4 3.1 配套------------------------------------------------------------------------------------------- 43.2 必需的配套仪器----------------------------------------------------------------------------- 44. 仪器组成-------------------------------------------------------------------------------------- 4 4.1 主操舵台-------------------------------------------------------------------------------------- 4 4.1.1 1#泵启动和报警模块、2#泵启动和报警模块--------------------------------------- 4 4.1.2 电源开关------------------------------------------------------------------------------------- 4 4.1.3 系统选择开关-------------------------------------------------------------------------------- 5 4.1.4 模式选择开关-------------------------------------------------------------------------------- 5 4.1.5 应急操舵开关-------------------------------------------------------------------------------- 5 4.1.6 主随动发令模块---------------------------------------------------------------------------- 5 4.1.7 显示器模块---------------------------------------------------------------------------------- 5 4.1.8 1#电源滤波组件、2#电源滤波组件---------------------------------------------------- 6 4.1.9 KZQ-I控制器和KZQ-II控制器------------------------------------------------------------ 6 4.1.10 报警器--------------------------------------------------------------------------------------- 7 4.2 舵角反馈器------------------------------------------------------------------------------------ 7 4.3 操舵控制箱------------------------------------------------------------------------------------- 74.4 1#、2#舵机启动箱---------------------------------------------------------------------------- 75 操作说明-------------------------------------------------------------------------------------- 7 5.1. 操舵仪的启动与停止----------------------------------------------------------------------- 7 5.1.1 启动-------------------------------------------------------------------------------------------- 7 5.1.2 停止-------------------------------------------------------------------------------------------- 8 5.2. 控制系统的选择----------------------------------------------------------------------------- 8 5.3 手动应急操舵--------------------------------------------------------------------------------- 8 5.3.1. 舵机舱应急操舵---------------------------------------------------------------------------- 8 5.3.2 主操舵台应急操舵------------------------------------------------------------------------- - 9 5.4. 随动操舵-------------------------------------------------------------------------------------- 9 5.4.1 主操舵台随动操舵-------------------------------------------------------------------------- 9 5.5 自动操舵------------------------------------------------------------------------------------- 9 5.5.1 自动操舵方法------------------------------------------------------------------------------- 9 5.5.2 航向的设定---------------------------------------------------------------------------------- 10 5.5.3 自动限舵角度的设定---------------------------------------------------------------------- 10 5.5.4 自动操舵参数设定-------------------------------------------------------------------------- 10 5.5.5 自动操舵性能的优化------------------------------------------------------------------------ 115.6 操舵仪的报警系统------------------------------------------------------------------------- 12 5.6.1 操舵仪控制器报警------------------------------------------------------------------------- 12 5.6.2 舵机警报------------------------------------------------------------------------------------- 12 5.6.3 操舵仪控制器失电报警------------------------------------------------------------------- 12 5.7 照明调光------------------------------------------------------------------------------------- 12 5.7.1 显示器调光--------------------------------------------------------------------------------- 12 5.7.2 随动发令模块调光------------------------------------------------------------------------- 135.8 语言选择------------------------------------------------------------------------------------- 136. 安装------------------------------------------------------------------------------------------- 137. 试验------------------------------------------------------------------------------------------- 13 7.1系泊试验------------------------------------------------------------------------------------- 13 7.2航行试验------------------------------------------------------------------------------------- 147.2.1 舵角倍率的设定--------------------------------------------------------------------------- 148. 安全和维护保养---------------------------------------------------------------------------- 159. 备品与备件---------------------------------------------------------------------------------- 1510. 保证事项------------------------------------------------------------------------------------- 15 附图1------------------------------------------------------------------------------------------------- 16DC-ⅢS型自动操舵仪使用说明书1 概述DC-ⅢS型自动操舵仪是船舶航行的重要设备。
船舶自动操舵仪故障及排除方案

船舶自动操舵仪故障及排除方案论文对自动操舵仪这一部件进行一些简单介绍,继而重点针对船舶自动操舵仪的常见故障提出故障诊断与检测方案,旨在通过有益的探讨不断丰富船舶控制技术经验,为提高船舶的自动控制水平建言献策。
【Abstract】The paper briefly introduces the autopilot. And then,in view of the common faults of the ship autopilot,the fault diagnosis and detection scheme is put forward. The purpose of this paper is to offer suggestions for improving the automatic control level of the ship through enriching the experience of ship control technology.【關键词】自动舵;故障诊断;故障排除1 引言对于船舶而言,要使其能在航线上稳定而安全的运行,那么则需要保证自动操舵仪能够正常工作。
实际上,其中舵机震荡带来的问题的发生频次最高。
在我国,船舵制造行业在近几十年来已经发展得较为成熟,特别是小型船舶,年制造数量非常惊人,并且性能相当可靠。
因此,我国自主制造的船舶自动操舵仪完全符合国际主流水平。
笔者将对自动操舵仪这一部件进行一些简单介绍,继而重点针对船舶自动操舵仪的常见故障提出故障诊断与检测方案,旨在通过有益的探讨不断丰富船舶控制技术经验,为提高船舶的自动控制水平建言献策。
2 船舶自动操舵仪工作原理常规自动操舵通常是指用电罗经或磁罗经检测航向偏差,在通过航向控制器进行舵角操纵,达到航向纠偏。
罗经对船舶实际的航行方向进行实时把控,我们由此可以了解船舶的航行是否存在方向误差以及多大的误差,得到信号数据之后,自动操舵仪可以直接对转动舵进行控制,以此来调整航行方向。
自动操舵仪

自动操舵仪主要用途自动操舵仪可实现船舶的航向自动控制,具有航向自动操舵、随动操舵、手动操舵和急操舵及舵机状态指示和舵机监控报警等功能。
自动部分为独立的进口自动系统,随动和手动采用了集成电路和大功率开关管,使整套仪器具有功能完备、性能稳定、控制精度高、使用维护方便等特点。
本仪器适用于液压舵机的大、中、小型船舶使用。
主要技术性能1、电源:AC380V、50Hz;220V、50Hz;DC24V;A:三相380V, ±5%B:220V、50Hz,±5%C:DC24V、3A,+10% ~ -10%2、操舵方式:自动、随动、手动;3、操舵范围:±40º;4、操舵精度:≤1º;5、不灵区: 0.5º~2º可调;6、手操方式下可双泵工作;7、报警范围:动力电源失电、过载、断相、控制电源失电,油液低液位、油液高温、滤油器堵塞、压力差、罗经故障;并具有报警试验功能和消音后自动复位功能;8、电磁阀参数:DC24V、额定电流≤3A;配套方案表序号名称型号数量防护1 驾驶室主仪器DD101-ZTG 1 IP222 1#油泵启动箱SC9-K 1 IP223 2#油泵启动箱SC10-K 1 IP224 舵机舱报警箱CKD-4 1 IP225 反馈舵角发送器DD101-WK 1 IP566 自动反馈发送器FB-40 1 IP567 手操舵开关箱SC3-K 1 IP22DD101-ZTG主仪器外形图SC9/10-K油泵启动箱外形图CKD-4舵机舱报警箱外形图DD101-WK反馈舵角发送器外形图FB-40自动反馈发送器外形图SC3-K手操舵开关箱外形图DD101-ZT随动操舵仪主仪器1#油泵起动箱2x1 22x1 2 2x1 2 2x1 2 3x6 3 3x6 3至1#系统电磁阀至1#系统行程开关至1#系统电磁阀至1#系统行程开关(左)(右)(右)(左)1#油泵电机1#380V电源2x1 22x1 22x1 22x1 23x6 33x6 3至1#系统电磁阀至1#系统行程开关至1#系统电磁阀至1#系统行程开关(左)(右)(右)(左)1#油泵电机1#380V电源2#油泵起动箱舵机舱报警箱CKD-4SC9-KSC10-K舵机舱手操舵开关箱SC3-K舵机反馈 舵角发送器DD101-WK1#油液低液位1#压力差4x134x135x132x1 22x1 2至船电应急电源DC24V至船电源AC220V12x1115x1 1315x1 132x1 22x1 2 1#油液低液位1#压力差3x1 22x1 21#油温高温2x1 21#油温高温2x1 21#滤油器堵塞2x1 21#滤油器堵塞2x1 212x1110x1 910x1 93x133x134x1 4无源常闭触点800公共点±10V随动反馈输出±10V随动发送输出1#启动常开触点2#启动常开触点操舵方式无源输出触点公共点3504x142x123x132x1 22x1 22x1 218x1 17自动反馈发送器FB-404x132x1 2自动舵电源DC24V至GPS至电罗经2x125x15分罗经系统布置图2052091051091051081091111121131141161331341361381391401381394094074054034013011A1B 1C 1RJ11RJ21RJ31391421421331381411411331051092052092A2B 2C 2RJ12RJ22RJ3239242242233238241241233205208209211212213214216233234236238239240238239410408406404402301138139140238239240121212121212331234123456789101112131234567891231234567891011121312345671231212123456789101112131234567123456789101112131234567893412121212121212331231231212+-1234x12x12x12x12x13x63x613x12x12x18XK18DCF18DCF28XK2SC9-K (左行程)(右行程)(右电磁阀)(左电磁阀)1#油泵电机1#380V电源DD102-ZT随动操舵仪主仪器AC 220V SC10-K2x12x12x12x13x63x69XK19DCF19DCF29XK2(左行)(右行)(右阀)(左阀)2#油泵电机2#380V电源舵机舱手操舵开关箱SC3-K1#油泵起动箱2#油泵起动箱4024044064084103013013033143163183203223264014034054074093013013033133153173193211234567123456734567891234567舵舱报警箱CKD-44113012x1121#压力差1#油位低2x1301409122x1122#压力差2#油位低2x112301410301412舵机反馈 舵角发送器DD101-WK41184121241112滤油器堵塞1#2x130141312滤油器堵塞2#2x1301414412323883248812油液高温1#2x1301415122#2x1301416油液高温41341394149941432599JX1JX2JX31010DC 24V 4164154154163283271010报警电源舵角电源123128218232382282423123456451212349101112131415161712345123456789101112123Z1Z2Z35x160660860560760912912512622922622513x19x110x13x 13x110x13x13x11#启动常开触点2#启动常开触点±10V随动反馈输出±10V随动发送输出无源输出操舵方式公共点350801803805807809811813802804806808810812814816815105108109111112113114116133134136138139301303313315317319321323325327125126129P N TH TC301303351350GND1SIG1353352601602605606607608609COM D1D2F1F2+-F3GYH GYC 205208209211212213214216233234236238239301303314316318320322324326328225226229GC H 1212+-2x1DC 24V 自动舵电源123GPS123Z3自动舵反馈FB-403x1黑白红至罗经1231分罗经80012345678无源常闭触点公共点8003011T2T3L1L2C01C02T11234512分罗经罗经故障输出线缆连接图。
国产DC-Ⅲ型数控自动操舵仪
国产DC-Ⅲ型数控自动操舵仪
无
【期刊名称】《军民两用技术与产品》
【年(卷),期】2009(000)007
【摘要】上海航海仪器有限责任公司研制成功国内首台具有动力定位功能的数控自动操舵仪。
这种国产新一代DC-Ⅲ型数控自动操舵仪具有对船舶和海洋工程装备航向自动控制的功能.可满足中国船级社相关规范要求.符合国际海事组织的最新性能标准.
【总页数】0页(P16)
【作者】无
【作者单位】无
【正文语种】中文
【中图分类】U666.153
【相关文献】
1.DC-Ⅱ型磁罗经自动操舵仪 [J], 倪顺义
2.DC-Ⅱ型磁罗经自动操舵仪通过鉴定 [J], 黄培华
3.DC-Ⅱ型磁罗经自动操舵仪简介 [J], 无
4.DC-Ⅰ型磁罗经自动操舵仪样机技术鉴定会在沪举行 [J], 于可
5.DC-Ⅰ型磁罗经自动操舵仪 [J], 虞建荣
因版权原因,仅展示原文概要,查看原文内容请购买。
船舶自动操舵仪故障分析及其解决方案
船舶自动操舵仪故障分析及其解决方案作者:李成玉摘要:文章分析了半导体分立元件和集成电路设计的自动舵工作原理,指出它们的缺点及其故障产生的根本原因。
应用可编程序控制器(PLC)技术研制的自动舵,克服了常规自动舵的缺点及其参数整定困难和控制效果的不足。
自整定比例微积分调节器(PID)自动舵能够自动适应船况和海况的变化,实现无扰动切换、变增益调节、抗积分饱和、微分先行等功能,克服了舵机振荡。
实船应用证明了该自整定比例微积分调节器船舶自动舵的有效性。
0引言船舶自动操舵仪是保证船舶安全航行的重要设备,而舵机振荡出现的故障率最高。
我国造船工业已具规模,每年生产艘数甚多的小型船舶,开发出性能可靠、价格合理的船舶自动操舵仪,完全可以得到推广和应用。
针对船舶自动操舵仪出现的故障,分析了其控制单元的特点及工作原理,给出了通用的性价比高的技术解决方案。
1常规自动舵控制单元分析1)半导体分立元件自动舵。
半导体分立元件正常工作需要一定的条件,若超出其允许的范围,将不能正常工作,甚至造成永久性的破坏。
对于大功率管的功耗能力并不服从等功耗规律,其工作电压升高,其耗能功率相应减小。
三极管在工作时,可能Uce并未超过BUceo,Pc也未达到Pcm,而三极管已被击穿损坏了。
因此,使用半导体模拟元件要考虑di/dt、du/dt的影响,即使在其允许工作范围内也可能造成损坏。
特别是外延型高频功率管,在使用中要防止二次击穿。
元器件老化、特性飘移,引起性能下降、工作不稳定,故障率最高。
2)集成电路设计的自动舵。
集成电路与分立元器件组成的电路相比,具有体积小、功耗低、性能好、重量轻、可靠性高、成本低等许多优点。
但同样对电源电压、温度、湿度等外界因素变化敏感,其内部又存在固有噪声,这些将引起回路特性和参数变化,降低其稳定性和可靠性。
其功能扩展困难,难以调试,不能在线修改和故障诊断,对制作工艺要求很高。
故障分析和排除十分困难。
3)舵机振荡出现的几率最高。
自动操舵仪CAN智能节点的设计与实现

自动操舵仪CAN智能节点的设计与实现周岗;陈永冰;孟云飞;徐务农【摘要】在分析使用比较广泛的自动操舵仪结构的基础上,提出基于CAN总线自动舵的整体结构,简要介绍C8051F500单片机的CAN控制器及收发器.对自动舵的CAN通用智能节点进行硬件和软件实现,制定节点标识符分配方案.【期刊名称】《船海工程》【年(卷),期】2013(042)002【总页数】4页(P172-175)【关键词】自动舵;CAN;智能节点;标识符【作者】周岗;陈永冰;孟云飞;徐务农【作者单位】海军902厂,上海200083【正文语种】中文【中图分类】U666.11传统的自动操舵仪内部通信方式并不灵活,也不利于实现全船的网络化。
国内自动舵的研究侧重于理论方面较多,很少针对性地解决工程实际应用中出现的问题,大部分自动舵成品通信线路复杂。
因此本文对通信总线采用CAN总线进行设计。
CAN总线能够灵活地、实时地进行通信,为自动舵实现模块化结构、易于扩展、实现全船网络[1]化打下基础。
CAN总线工作于多主方式,构成的网络节点之间的数据通信实时性强,提高系统的可靠性和灵活性,而RS-485构成主从结构系统,通信方式以主站轮询的方式进行,系统的实时性差。
本文重点分析自动舵信息传递的几种形式,设计以C8051F500为核心的智能通信节点,将多种信号通过智能节点发送到CAN网上,实现CAN网络节点通信以及数据共享。
1 系统基本工作原理及结构1.1 自动舵的基本工作原理自动操舵仪工作时,通过负反馈的方式,不断地把罗经送来的实际航向与设定的航向值进行比较,将差值放大后作为控制信号来控制舵机的转舵,使船舶能自动地保持或改变到给定的航向上。
航向自动舵的系统内有两个反馈回路:舵角反馈和航向反馈。
罗经过来的信号参与的外环和实时舵角信号参与的内环,是一个双闭环控制系统[2]。
航迹自动舵不仅有舵角和航向反馈,还有船位信息送入了主控单元,形成一个反馈系统,见图1。
【精品】自动舵控制系统设计
自动舵控制系统设计船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动操舵仪是总结了人的操舵规律而设计的装置,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备.系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向与实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;调节对象—船;舵角反馈机构等。
自1922年自动舵问世到今天,代替人力操舵的自动舵的发展确实取得了长足的进展,在相当程度上减少了人力,节约了燃料,降低了机械磨损,但是距离真正意义上的操舵自动化还有相。
当大的距离。
一国内外研究现状自70年代起,国内一些科研院所、高校开展自动舵的理论与开发工作,并取得了不少成果,一些航海仪表厂家也独立或与研究所、高校合作开展了自动舵的试制和生产,其产品以模拟PID舵为主。
目前虽然国产自适应舵已经投入实船使用,但效果并不明显。
智能控制舵还处于理论研究阶段,还没有产品化。
航迹舵基本上也处于研究阶段,还没有过硬的产品。
目前国外市场上有多种成熟的航向舵、航迹舵产品,其控制方法大多为比较成熟的自适应控制,例如日本Tokimec公司的PR—8000系列自适应自动舵、德国Anschuz公司的NAUTOCONTROL综合系统中的自动舵、美国Sperry公司VISIONTECHNOLOGY系统中的自适应自动舵等。
近几年发展起来的智能控制及其它近代控制在自动舵上应用尚处于方案可行性论证及实验仿真阶段,还有待于进一步工程实现研究。
我国对自适应舵的研究起步较晚,自80年代以来,有关单位开展了对自适应舵的研究工作,发表了一些设计方案,仿真研究结果和产品。
自动操舵仪操作规程

CSGZ 版本号:QSMS-2 文件编号:QSMR-NA4-D-01 页次:1/1HQ-系列型自动操舵仪操作规程一.根据需要将机组选择开关由停止位置转到I或II的位置来接通I或II舵机机组。
二.视情况调整“亮度调节旋钮”使罗经面板航向改正及舵角指示器到所需的亮度。
三.向下拉航向匹配旋钮的保险销并按住航向匹配旋钮,转动该旋钮修正自动舵面板上的航向指示刻度盘与陀螺罗经的同步误差。
(无特殊情况勿动该旋钮)四.手动操舵:a.先将操纵选择开关转到手动位置。
b.操作左及右两个手柄即可操纵左、右两台舵机至所要的舵角位置(舵角指示器位于操纵台的左边)。
c.当要操某一舵角时,操纵操舵手柄并看住舵角指示至该舵角之前就要松开手柄,此时舵就转到所要求的舵角位置。
五.随动操舵:a.将操纵选择开关转到随动位置。
b.转动手轮到所要的舵角位置,即可操纵舵机进行左、右操舵。
六.自动操舵:a.当要走某一即定的航向时,先用随动操舵将船首稳定在该航向上。
b.向下拉航向改正旋钮保险销,并按住航向改正旋钮,转动该旋钮使航向改正显示窗内的航向刻度至所要走的航向。
c.将操纵选择开关转到自动的位置,舵机即可自动操舵。
七.面板上的各旋钮的功能:a.灵敏度调节旋钮(也称天气调节旋钮)在良好海况下,灵敏度可以调节高些;反之,在恶劣海况下,灵敏度应调低些。
b.比例调节调节时应根据海况、船舶装载情况和舵叶浸水面积等不同情况而定。
海况恶劣、空载、舵叶浸水面积小,应选用高档;风平浪静船舶操纵性能好时用低档。
c.微分调节重载、旋回惯性大时微分要调大;反之,要调小。
海况恶劣,微分作用要调小或调至0。
d.压舵调节(1)将压舵调节选择开关转到压舵位置,然后调节面板上的压舵旋钮使舵叶偏转一个固定的角度,以抵消单侧偏航作用。
(2)当有不对称偏航情况下,应将压舵调节选择开关转到积分位置,舵机就可自动向左或向右进行压舵。
e.航向改变调节在使用自动舵时用来改变航向。
若要向右改变航向5°,按下旋钮,向右转到5°处,待船舶转到给定航向时,指针能自动回零,不需人工复位。
船舶自动操舵仪故障分析及其解决方案
也未 达 到 P … 而 三 极 管 已被 击 穿 损 坏 了。 因此 ,
备,而舵机振荡出现的故障率最高。我国造船工业 已具规模 ,每年生 产艘 数甚 多 的小 型 船舶 ,开发 出
性能可靠 、价格合 理 的船舶 自动操 舵仪 ,完全 可 以 得到推 广 和 应 用 。针 对 船 舶 自动 操 舵 仪 出 现 的故 障 ,分 析 了其 控制 单元 的特 点及 工作 原理 ,给 出 了
维普资讯
第 2 卷 第 3期 1 20 0 8年 6月
中 国 修 船
C NA HI R AI HI S P EP R
V0 . No 3 121 .
Jn 20 u .0 8
船 舶 自动 操 舵 仪 故 障 分 析 及 其 解 决 方 案
p n n s o e c nd co n n e r t d cr ui, p itngo tt e c u e rt e s o to n s a d fu t . Th ut— o e t fs mi o u tra d it g ae ic t on i u h a s sf h h rc mi g n a ls o ea o
cn ioso oht hpadoen el ign nds rigs i h vr dut go h ne an auai o dt n f t h si n ca ,ra z o —iubn w t oe ,ajsn f a gdgi ,strt n i b e in t c i c o
poe ee ii c f h dut o I r e - no i . rvst fc nyo eajs r rm PD f lc f t h f e t ef o sfo r y m
舵设备与操舵第四节 操舵装置的控制系统

第五节 自动舵(autopilot)
3.使用自动操舵仪(自动舵)的注意事项
1)自动操舵只有当船舶航行于海上,不需要频繁变向时才使用。其他 情况。。。需要人工操舵时,均应使用或改为人工(随动)操舵。 • 船舶遇有大风浪,或为保护自动舵时也应改用人工操舵。 • 在上述这些情况下,应毫不迟延地为值班驾驶员提供一位合格的舵 工,该舵工应随时准备接过操舵工作。 2)当随动操舵时操舵失效或在自动操舵时自动和随动均失效时,应立 即按应急操舵程序改为应急操舵。 3)从自动操舵转换为人工操舵,以及相反地从人工操舵转换为自动操 舵,应由一位负责的驾驶员操作或在其监督下进行操作。 4)在长期使用自动操舵仪以后,以及在进入需要特别谨慎驾驶的区域 以前,均应试验人工操舵。通常在使用自动舵航行时,每一航行班 次(即每4小时)至少应检查一次随动操舵装臵是否正常。 5)在随动操舵状态下,自动操舵的有关各调节旋钮不起作用,但当随 动转入自动操舵时,应先将压舵旋钮和自动改向旋钮调至零位。
1.力矩马达式操舵控制系统 2.伺服油缸式操舵控制系统
二、电动操舵装臵的控制系统
1.单动操舵控制系统(手柄控制系统)
a.原理; b.操舵注意两点(按舵角和航向操舵的不同)
2.随动操舵控制系统
注意工作原理。
随动操舵(Follow-up steering)控制
第四节 操舵装臵的控制系统
操舵控制系统的布臵要求:
5)压舵调节:
无积分作用的自动舵设此旋钮,用以调整压舵的舵角大小。 当船舶受到风流等恒值外力干扰而向单侧方向偏转时,需向相反一舷 压舵,以抵消单侧偏航作用。 压舵的舵角大小可以根据船舶偏转情况来选定。 对于PID自动舵,当利用GPS自动测算时,不必人工调节。
6)自动改向调节(Course adjust):
型船舶自动操舵仪安全操作及保养规程
型船舶自动操舵仪安全操作及保养规程随着科技的不断发展,越来越多的船舶开始使用自动操舵系统,型船舶自动操舵仪安全操作以及保养规程成为非常重要的问题。
本文将详细介绍型船舶自动操舵仪的操作技巧和保养方法,以保障船员的安全和船舶的正常运行。
型船舶自动操舵仪操作规程1. 操舵前的准备在使用型船舶自动操舵仪前,必须进行一系列的准备工作:1.确认自动操舵仪的启动方式和电源状态2.确认舵机和控制设备的连接状况3.确认电动舵机和传感器的工作状态2. 开启自动操舵在操纵室或船长室将自动操舵仪调整至自动工作状态,并在主控制台上设置自动操舵的目标航向和速度。
此时,操作员还需确认指南针和陀螺仪的校准状况。
3. 监控航行状态开启自动操舵后,船舶可以自动行驶至指定航向和速度。
此时,操作员需要监控速度、航向等参数,随时调整操作、校正系统偏差。
如果发现航行状态不符合预期,操作员应该立即进行调整,保障船舶安全。
4. 手动控制如果需要更改航向或速度,可以通过自动操纵面板或控制杆手动操作。
在手动操纵时,应当关闭自动操纵系统,并保障手动操纵平稳。
同时,需要监控航向、水深、风向等信息,及时进行调整。
5. 关闭自动操舵当需要关闭自动操舵时,需要先将自动操控面板设为手动模式,然后将舵机归中,排除可能的系统误差。
最后,确保自动操纵面板和控制杆的操作设定参数均已清除。
型船舶自动操舵仪保养规程1. 定期检查型船舶自动操舵仪应定期进行检查,包括检查传感器、控制面板、电源等设备的工作状态。
检查可能出现的故障,及时更换或维修。
2. 清洁和防护型船舶自动操舵仪应保持清洁,并做好防护措施,防止海水、油脂、硫化氢等物质侵蚀和污染。
在各种恶劣环境下,可以使用防水、防腐蚀护套保护板。
3. 操作员培训船员应接受专业培训,掌握自动操舵操作技巧及规程。
结束语型船舶自动操舵仪广泛应用于各种船舶中,便于控制和管理船只,提高了船只的安全性和经济效益。
在使用时,要严格遵守规程,正确操作自动操舵仪,并保养好设备,以保障船员和船舶的安全和正常运行。
第6章_6.7自动操舵控制系统

对舵机装置的要求
我国《钢质海船入级与建造规范》根据《国际海上人命安全公约(SOLAS公约)的
规定,对于从事于 国际航行的大于500 总吨的货船或仅从事于非国际沿海航行的大
于1600总吨的货船的舵机提出了明确要求,基本技术要求如下: 1.每艘船舶均应设置1 套主操舵装置和1 套辅助操舵装置。主操舵装置和辅助操 舵装置的布置,应满足当其中一套发生故障时不致引起另一套也失效;如主操舵装 置具有2台或2台以上相同的动力设备则在下列条件下可不设置辅助操舵装置: ①对于客船,当任一台动力设备不工作时,主操舵装置仍能按本规定进行操舵; ②对于货船,当所有动力设备都工作时,主操舵装置能按本规定进行操舵; ③主操舵装置应布置成当其管系或一台动力设备发生单项故障时此缺陷能被隔离, 使操舵能力能够保持或迅速恢复。
自动操舵基本类型
定义:自动舵的基本类型是指按操舵 的规律分类的(也就是舵的偏转规律)类 型,而不是舵机装置的类型。 三种基本类型:⑴.比例舵;⑵.比例 - 微分舵;⑶.比例 - 微分 - 积分舵。 说明:不同基本类型的自动舵,对舵 叶的调节规律是不同的。
偏航与操舵
自动舵方框图
比例舵
比例舵操舵的规律是:偏舵角β 的大小与偏航角φ 的大小成比例关 系,即: β = - K1φ 其中:K1为比例系数,负号表示与偏航方向相反。 特点:机构简单,航行保持精度较差,船舶营运经济性较差(会出 现S形航迹)。 比例舵的不足:偏航初期偏舵角较小,不能很快阻止船舶继续偏航; 回航过程中船舶具有惯性,偏舵角不能及时减小,容易反向偏航。
比例-微分-积分舵
组成:是在比例 - 微分舵基础上增加积分环节。积分环节作用是 — — 克服不对称偏航。K3是积分系数。 不对称偏航的产生:不对称偏航是某舷(侧)的偏航角持续时间比另 一舷(侧)偏航角持续时间长。 原因:装载不对称,斜向风的持续影响,斜向海潮的持续影响。—— 对于具有双螺旋桨推进的船舶,螺旋桨推进的不平衡也会产生不对称偏航。 积分环节工作原理:积分环节可以对偏航持续时间进行累积,当某舷 (侧)偏航持续的时间比另一舷(侧)持续时间长时,通过环节输出的信 号(偏舵角)将继续保持,这个信号将通过执行机构使舵叶维持在一定的 偏转角度上,从而使船舶具有克服单向偏航的能力。
自动舵

PR-7000-L 自动舵第一章综述1.1介绍本自动舵作为一款简便的操纵仪,具有4种操作模式:计算机辅助操纵(CPU)、手动操纵(HAND)、应急操纵(NFU)及遥控操纵(RC-1、RC-2)(可选择);并可只通过转换MODE SELECTOR SWITCH(模式选择开关)来进行选择。
另外,通过按下在MODE SELECTOR SWICH键左边的MODE SELECTOR PUCH BUTTON SWICH(模式选择按钮)操纵CPU选择三种不同的操作模式:自动舵(AUTO)、积分舵(RATE)、自动导航(NA V:选择)具有双重模式的自适应舵具有两套完整的系统,SYSTEM SELECTOR SWITCH(系统选择开关)有以下几档:NO.1-OFF-NO.2,当开关转至所需运行的系统位时,系统会自动进入运行状态,而当开关转到OFF档时,整个系统将停止工作。
自动舵是一套使船舶维持在预先设定的航向上航行的自动操舵控制装置,近来,对于自动舵的性能评估已从“能使船舶精确维持航向”变为“在各种情况下,最省油的操纵”。
然而,船舶的操纵取决于船舶的尺度及具体的技术指标,同时也随着船舶的航速,装载情况及海况的不同而不同。
因此,对于自动舵的评价没有明确的标准。
为了解决这些问题,本款自适应舵引入了性能测试功能以测定在自动舵协助的情况下,能节省的能量。
本款自适应舵有如下特性:;控制操纵装置运用的是一套微处理器并且完全数字化;;基本控制方式是自适应控制系统反馈模型;根据船舶速度和装载状况的改变能迅速调整,能够在各种状态下,进行最佳的操纵。
;三种航向维持模式,可根据实际,适用于各种海况:OPEN SEA(开放水域模式)适用于只需小幅度操纵导航的情况,如在大洋上航行,为的是节省燃料的费用。
CONFINED(限制模式)适用于大幅度的操纵情况,如在狭水道中航行,为的是提高航向维持的精确性。
比例舵(RATE)作为一种标准的操纵模式,可以通过旋转舵轮给出的指令指示,按设定的转向速率来控制船舶。
船用操舵仪-最新国标
船⽤操舵仪1范围本标准规定了船⽤操舵仪的组成、性能及试验的要求和⽅法。
本标准适⽤于船⽤操舵仪的设计、制造和验收。
2规范性引⽤⽂件下列⽂件中的内容通过⽂中的规范性引⽤⽽构成本⽂件必不可少的条款。
其中,注⽇期的引⽤⽂件,仅该⽇期对应的版本适⽤于本⽂件;不注⽇期的引⽤⽂件,其最新版本(包括所有的修改单)适⽤于本⽂件。
GB/T4208外壳防护等级(IP代码)GB/T2423.16电⼯电⼦产品环境试验第2部分:试验⽅法试验J及导则:⻓霉GB/T2423.17电⼯电⼦产品环境试验第2部分:试验⽅法试验Ka:盐雾GB9193-2005船舶声光报警信号和识别标志GB/T13306标牌GB/T13384机电产品包装通⽤技术条件GB/T14775操作器⼀般⼈类⼯效学要求IEC60945:2002船舶导航和⽆线电通讯的设备及系统—⼀般要求—试验⽅法及结果IEC61162(所有部分)船舶导航和⽆线电通讯的设备及系统—数字接⼝IEC62288:2014船舶导航和⽆线电通信的设备及系统导航信息显示⼀般要求、测试⽅法和结果CCS GD22-2015《电⽓电⼦产品型式认可试验指南》CCS GD03-2015《产品检验指南》3术语和定义下列术语和定义适⽤于本⽂件。
3.1报警alert出现异常及需要注意情况的警示,按紧急程度从⾼到低分为四级:紧急报警、重要报警、⼀般报警和提示报警。
3.2⽐例舵⻆调节proportional rudder adjustment舵⻆指令中的分量调节,与预定航向与实时航向之间瞬时的偏差值成⽐例。
3.3操舵控制通道steering control channel操舵仪完成⾃动(航迹、航迹向、航向等)或⼈⼯(随动、简易、越控等)操舵控制功能的从传感器、供电电源到控制末级元件的完整信号通路。
3.4操舵失效steering failure⼈⼯或⾃动发出操舵指令后,舵机未按指令要求动作的故障现象。
3.5操作装置operational device⽤于操作操舵仪的开关、键盘、按钮等的统称。
自动舵PR-6000-ZZ操作规程

自动舵操作程序1.启动步骤(1)确保电罗经指向船的首向。
(2)确保舵机系统已经开启,并已完全作好准备启动自动操舵。
(3)打开电源开关。
(4)打开电源后,系统处于待机状态。
此时,确保显示的航向与电罗经的航向保持一致,没有警报产生。
(5)根据操舵系统的操作步骤转换到自动操舵模式。
若系统有警报产生,则无法实现转换。
(6)当转换到自动操舵模式时,航向控制单元的“ENABLE”灯亮起,表示自动操舵模式,此时,当前的航向即为预定航向。
(模式显示变为A)2. 停止步骤(1)必须确保在航行状态下实现从自动操舵模式到舵机系统操舵的转换。
(2)在转换到舵机系统操舵以后,当确认可以由舵机系统操舵时,关掉电源开关。
3.注意事项(1)从手动操舵模式转换到自动操舵模式之前,确保舵角为零(2)在被限制的海域或狭窄的海峡航行时,不要使用自动操舵模式(3)要时刻保持监控船舶航行,特别是在自动操舵模式下(4)如果电罗经出现一些异常情况,不要继续使用自动操舵(5)当出现“PWR FAIL”(本系统主电源异常)时,立刻停止使用自动操舵模式(6)当出现“DC FAIL”(24V直流电源异常)时也要停止使用自动操舵模式1.打开操舵仪电源,打开舵角指示器电源。
2.旋转“泵机选择”,可选择 1#泵或者2#泵。
3.旋转“操舵模式”可选择:(1)随动模式:是指驾驶人员操纵舵轮发出转舵指令,使舵自动跟踪到达指令位置。
(2)手动模式:是指驾驶人员操纵“手柄操舵“发出指令,使舵自动跟踪到达指令位置。
(3)副站模式:是指配置在驾驶两翼的操舵装置。
(4)自动模式:操舵仪工作于自动操舵方式。
4.自动操舵⑴将“操舵模式”转换到“自动”。
⑵灵敏度:根据海况,适当调节灵敏度,逆时针旋转灵敏度调节旋钮到头,灵敏度调为“自动”。
⑶舵角比:通常舵角比设置于1-1.5位置,最佳舵角比的设定值取决于船型、舵的性能、船速等。
⑷挡舵:是根据载重情况设定,满载时置于较大数值,压载/轻载时置于较小数值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动 操 舵 仪
三 机遥控装置
主要 部件 采用进 口器 件 ,无管路至 驾驶 室 ,安装调 试 方便 制精度 高 。无级调 速和 有机调 速合 一 ,可根据 实 际需要现 场 择。档 位转 速可在 现场 根据主 机实 际情况 任意 设置 ,多机 运
时可达 到各档 位转 速一 致。在 设置 密码通 过 的情 况。 主机 加 埘间、换 向时 间、脱 排 、合排 可在现 场设 置。单 手柄 实现主
旧; 圭 日 E 枪 茬 封i 全 £ 白 ; 瓣 J 稠 桔 ; 干J 奢 妻耸 动 台 嘲 肇
是 通过 手轮 或旋钮 设
1 舵 角度 数 ,而 后让 个 舵 叶 自动 跟 踪 到 这 个 舵 角 度 数 ( 踪 误 差 跟
为 ±1 )未 实现 随动 。
操舵功能的。 圈
8 船舶 标准 化工程 师 2 1 / 0 1 0
有 两 台油 泵 机 组 的
起动 和停 止功 能 ,并且 有 自动 操舵 、 随动 操舵 、 手 动操 舵和 应急 电源操 舵 四种 操舵 方式。其 中 自动 操 舵 可将 电 罗 经 、 磁 罗经 、GP 信号 引 入 S 自动操 舵仪 实现 对船舶 的 自动 驾驶 。随动 操舵