基于ug的发动机曲轴连杆机构的虚拟设计与运动仿真
基于UG的内燃机活塞机构虚拟装配和运动仿真 (1).

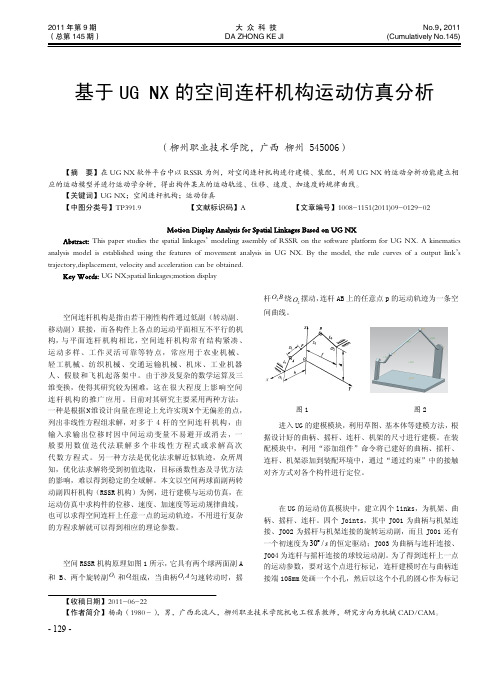
L001L002L003L004图1内燃机原理图基于UG 的内燃机活塞机构虚拟装配和运动仿真熊娟1,覃欣2(1.四川电力职业技术学院,四川成都610071,2.中国测试技术研究院,四川成都610021摘要:为改变二维设计的不足和适应现代化的需要,借助UG 强大的建模和装配技术,分析了内燃机活塞机构中各构件的三维建模过程及构件之间的虚拟装配过程;通过UG 的仿真技术,对内燃机活塞机构设计过程中的连杆创建、运动创建、驱动定义等环节进行了分析。
实践证明,利用UG 进行虚拟装配和运动仿真,可以缩短产品的研发周期,提高生产效率。
关键词:内燃机;活塞机构;UG 软件;虚拟装配;三维建模;运动仿真中图分类号:U261.2;TP391.9文献标识码:A文章编号:1674-5124(200906-0038-04Virtual assembly and movement emulation for piston mechanism of internalcombustion engines based on UGXIONG Juan 1,QIN Xin 2(1.Sichuan Technical College of Electric Engineering ,Chengdu610071,China ;2.National Institute of Measurement and Testing Technology ,Chengdu 610021,ChinaAbstract:In order to conquer the shortage of two-dimensional design and adapt to the needs of modernization ,combining with the strong function of modeling and assembly technology of modern CAD software UG ,the authors analyzed the detailed modeling process of piston mechanism in internal combustion engine and introduced the virtual assembly process of all components.Based on the simulation function of UG ,it was analyzed for the movements of all components in piston mechanism.Finally ,the CAD software UG shows its strong advantage of mechanical design with flexibility and low cost.Key words:Internal combustion engine ;Piston mechanism ;UG software ;Virtual assembly ;Modeling ;Movement emulation收稿日期:2009-05-01;收到修改稿日期:2009-07-22作者简介:熊娟(1964-,女,四川广安市人,副教授,主要研究方向为现代制造技术。
案例3 基于UG机械动力学分析-运动仿真

2018/11/7
1.1
打开运动仿真主界面
菜单命令:
【开始】→【运动仿真】
2018/11/7
环境设置
运动学分析:分析仿真机构的运动并 决定机构在约束状态下的位移、速度 、加速度的值的范围
运动学求解需注意以下几点:
软件根据求解时输入的时间与步长的值对模型做动画仿真
外部的载荷与内部的力影响反作用力但不影响运动 连杆和运动付假定都是刚性的 自由度为0 注意:运动学分析时,对有自由度或有初始力的机构结算器不进行求解 ,这类机构需要做动力学分析
2018/11/7
1)旋转副 (Revolute)
可以实现两个相连件绕同一轴作相对的转动
2)滑动副(Slider)
滑块连接是两个相连件互相接触并保持着相对的滑动
3)圆柱副(Cylindrical)
实现了一个部件绕另一个部件(或机架)的相对转动
4)螺纹副(Screw)
实现了一个部件绕另一个部件(或机架)作相对的螺旋运动
副(Joint)相联接,组成运动机构。
2018/11/7
2.1
连杆特性的建立
点击运动仿真工具栏区的连杆特性和
运动副模块中的图标 (Link),系
统将会打开【连杆特性创建】对话框
。 同一对象不能属于两个连杆
2018/11/7
2.2
连杆特性参数的编辑
对各项参数 的编辑与连 杆建立时的 参数设置操
作完全相同
2018/11/7
环境设置
动态分析:如果模型有一个或多个自 由度,必须做动力学分析,在动力学 仿真中,可以在求解方案对话框中选 择静力平衡选项。
静力平衡分析将模型移动到一个平衡 的状态。
基于UGNX的空间连杆机构运动仿真分析
- 129 -基于UG NX 的空间连杆机构运动仿真分析杨 南(柳州职业技术学院,广西 柳州 545006)【摘 要】在UG NX 软件平台中以RSSR 为例,对空间连杆机构进行建模、装配,利用UG NX 的运动分析功能建立相应的运动模型并进行运动学分析,得出构件某点的运动轨迹、位移、速度、加速度的规律曲线。
【关键词】UG NX;空间连杆机构;运动仿真 【中图分类号】TP391.9【文献标识码】A【文章编号】1008-1151(2011)09-0129-02Motion Display Analysis for Spatial Linkages Based on UG NXAbstract: This paper studies the spatial linkages ’ modeling assembly of RSSR on the software platform for UG NX. A kinematics analysis model is established using the features of movement analysis in UG NX. By the model, the rule curves of a output link ’s trajectory,displacement, velocity and acceleration can be obtained.Key Words: UG NX;spatial linkages;motion display1 前言空间连杆机构是指由若干刚性构件通过低副(转动副﹑移动副)联接,而各构件上各点的运动平面相互不平行的机构,与平面连杆机构相比,空间连杆机构常有结构紧凑、运动多样、工作灵活可靠等特点,常应用于农业机械、轻工机械、纺织机械、交通运输机械、机床、工业机器人、假肢和飞机起落架中。
由于涉及复杂的数学运算及三维变换,使得其研究较为困难,这在很大程度上影响空间连杆机构的推广应用。
基于UG的发动机曲轴数控加工仿真

图 3连 杆 轴 颈 处 插 补 刀 轴 插补是指在所需 的路径或 轮廓线上 的两个 已知点 间根据某一数学 函数 例如直线 , , 圆弧或 高阶函数来确 定其多个 中间点的位置坐 标值 的运算过程 , 主要包括直线插 补方式和 圆弧插补方式 , 它 直线插补是指 两点间的插补沿着直线 的点群来 逼近 , 沿此直线控 制刀具 的运 动 , 圆弧 插补则是根据两端点问 的插补数 字信 息 , 计算 出逼 近实 际圆弧的点群 , 控 制 刀 具 沿 这 些 点 运 动 , 工 出 圆弧 曲线 。 们 这 里 的插 补 即为 圆 弧 插 加 我 补 方 式 ,通 过 多 个 数 据 点 的 刀 轴 控 制 得 到 整 个 复杂 驱 动 几 何 体 的 刀 轴
径 2。 O
图 I 车 铣 加 工 曲轴 2 曲轴 的 三 维 造 型 . 曲轴 的 三 维 实 体 建 模 过 程 主 要 包 括 以 下 几 大 部 分 :建 立 前 输 出 法
接 下来 创建操 作, 型选 择 “ i m l ai ,单击 子类型 中 的 类 m l ut x s l _ i ” — C N O R可 变轴 曲面轮廓 铣), OTU ( ” 可变轴 曲面轮廓铣 提供 了五轴 方 式 的零件 加 工方 法 , 这 种可 变轴 加 工 的过 程 中 , 具 的 在 刀 轴 线方 向被严格控制 , 从而实 现精加 工。 系统为可 变轴 曲面轮廓铣提供
1引 言 .
“ r) OG AM” 项 , 认 程 序 名 称 “ RO R NCJR R 选 默 P G AM一 2 , 击 “ 定 ” 0”单 确 按
钮。
曲 轴 属 于 偏 心 回 转 类 零 件 , 制 造 业 中属 于 难 加 工 复 杂 零 件 , 主 在 其
基于UG的运动仿真及高级仿真

《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
基于UG软件的四连杆运动仿真分析

基于UG软件的四连杆运动仿真分析田多林【摘要】UG软件是集CAD CAE CAM于一体的三维参数化软件,也是当今世界最先进的设计软件,它广泛应用于航空航天、汽车制造、机械电子等工程领域.平面四杆机构是由一个低副(转动副)联动装置经过互相连接而形成的一种运动构件,它由一个圆柱面或一个平面组成的平面型机构,其制作工艺简单,使用方便高效,可以获取到比较精准的运动数据.而且它很容易实现普通的旋转、移位和转换,因此得到了广泛的应用.本文首先介绍了UG软件及运动仿真模块,然后对四连杆机构运动仿真进行了分析,为机构的优化设计提供参考依据.【期刊名称】《数字技术与应用》【年(卷),期】2015(000)011【总页数】1页(P63)【关键词】UG软件;运动仿真;四连杆;模型【作者】田多林【作者单位】新疆农业职业技术学院新疆昌吉831100【正文语种】中文【中图分类】TH1221.1 UG软件unigaphics(UG)是有美国的UGS公司开发的具备CAD/ CAM/CAE功能的软件,并且使用该软件进行产品设计软件的大型CAD软件,可以更直观准确地说明零、组件之间的形状和装配组件,可以完全的实现产品设计以及土工艺制造的规范化,并能与产品设计,开发的模具设计,模具和其他土工艺同时操作,从而大幅缩短产品的开发周期。
能够对产品装配直观准备UG具有灵活的复合建模模块。
复合建模包括几种建模方法:实体建模,曲面建模(固体)(surfaoe),线(线框模型)和基于特征的参数化建模。
产品零件的实体模型可以采用UG复合建模模块可以更直观和快捷。
1.2 UG的运动仿真模块UG的运动仿真模块是对机构的运动轨迹进行跟踪,从而分析机构速度、加速度、位移、作用力及反作用力等。
运动仿真作为UG/CAE(计算机辅助工程的主要部分)模块的组成部分,它可进行复杂的运动学分析,列如二维或者三维立体的动力学分析和模拟仿真。
通过UG 的建模功能,建立一个可视的三维立体模型,并通过UG的功能的模拟三维立体模型的各个部件的运动学特征,然后通过每个部分之间建立连接关系从而建立一个立体模型。
基于UG的机构运动创新设计与仿真

1.4.2 模拟工作场地及用品规格 (3)第一章绪论1.1 虚拟样机技术简介虚拟样机技术(Virtual Prototyping,VP)是一门综合多学科的技术。
该技术以机械系统运动学,动力学和控制理论为核心,加上成熟的三维计算机图形技术和基于图形的用户界面技术,以及广泛应用网络技术、计算机技术、信息技术、集成技术等,将产品的设计开发和分析过程集成在一起,把虚拟技术与仿真方法相结合,为产品的研发提供了一个全新的设计方法,可以显著的提高设计质量、降低开发成本,极大地提高企业地创新能力、竞争能力和经济效益。
虚拟样机技术是通过一个统一的实体数字化模型并与产品开发技术集成为三维的,动态的仿真过程。
应用虚拟样机技术,可以产品的使设计者、使用者和制造者在整个系统研制的早期,在虚拟环境中直观形象地对虚拟的产品原型进行设计优化、性能测试、制造仿真和使用仿真,这对启迪设计创新、提高设计质量、减少设计错误、加快产品开发周期有重要意义。
虚拟样机技术在设计的初级阶段―――概念设计阶段就可以对产品进行完整的分析,可以观察并试验各组成部件的相互运动情况。
使用仿真软件在各种虚拟环境中真实地模拟系统的运动,它可以在计算机上方便的修改设计缺陷,仿真实验不同的设计方案,对整个系统不断改进,直至获得最优设计方案。
由于虚拟样机是一种计算机模型,它能够反映实际系统的特性,包括外观、空间关系以及运动学和动力学的特性,借助于这项技术,设计师可以在计算机上建立产品的模型,伴之以三维可视化处理,模拟在真实环境下系统的运动和运动特性,并根据仿真结果精化和优化系统。
1.2 虚拟样机技术国内外的现状综述虚拟样机技术是20世纪80年代随着计算机技术的发展而迅速发展起来的一种计算机辅助工程(CAE)技术。
其研究和应用迅速得到许多研究机构及软件供应商的重视。
随着近代科学技术的发展,工程设计的理论、方法和手段都发生了巨大变化。
特别是近30年来,工程设计手段的先进与否、数字化程度的高低,在很大程度上决定了产品设计开发的周期、质量和成本。
发动机曲柄连杆机构的建模与仿真【毕业作品】
任务书设计题目:发动机曲柄连杆机构的建模与仿真1.设计(论文)的主要任务及目标(1)根据桑塔纳轿车相关性能参数完成对发动机曲柄连杆机构的选型设计;(2)利用软件完成曲柄连杆机构各部件的仿真建模、装配及运动仿真。
2.设计(论文)的基本要求和内容(1)完成机构本体零部件设计并撰写设计说明书一份;(2)完成零部件仿真及装配仿真一份;(3)完成零件图及装配图一套。
3.主要参考文献《机械设计》高等教育出版社《发动机设计》机械工业出版社《内燃机设计》机械工业出版社相关技术参数国家标准4.进度安排注:一式4份,系部、指导教师各1份、学生2份:[毕业设计(论文)]及答辩评分表各一份发动机曲柄连杆机构建模与仿真摘要:以桑塔纳2000AJR型发动机为例,基于相关参数对发动机曲柄连杆机构主要零部件进行结构设计计算,同时进行强度、刚度等方面的校核,并进行相关运动学分析和机构运动仿真分析,以达到良好的生产经济效益。
目前国内外对发动机曲柄连杆机构的设计,建模与分析的方法很多,而且已经完善和成熟,但仍缺乏一种基于良好生产效益、经济效益上的综合性分析,本次设计在清晰、全面剖析的基础上,有机地将各研究模块联系起来,达到既简便又清晰的设计目的,力求为发动机曲柄连杆机构的设计提供一种综合全面的思路。
关键词:发动机曲柄连杆机构,机构设计, Pro∕Engineer,AutoCADMODELING AND SIMULATION OFCRANKSHAFT IN THEENGINEAbstract: Santana 2000AJR engine, for example, based on the relevant parameters of the engine crank linkage main components structural design calculations, while the strength, stiffness and other aspects of the check, and associated institutions kinematic analysis and motion simulation analysis to achieve good production value for money.At present method design, modeling and analysis of domestic and foreign engine crank linkage of many, and has perfect and mature, but still lacks a good production efficiency based on comprehensive analysis of the economic benefits of this design in a clear, on the basis of comprehensive analysis, organically linked to each research module, to achieve both simple and clear design purpose, strive to design the engine crank linkage provides a comprehensive idea.Keyword:Engine crank linkage,MechanismDesign,Pro/Engineer,AutoCAD目录1绪论 (1)1.1国内外发展现状 (1)1.2研究的目的及意义 (1)1.3研究的主要内容 (2)2总体方案的设计 (2)2.1原始参数的选定 (2)2.2原理性方案设计 (4)2.3结构性方案设计 (5)2.4设计方案的确定 (5)3曲柄连杆机构受力分析 (7)3.1曲柄连杆机构运动学 (8)3.1.1 活塞位移 (8)3.1.2 活塞的速度 (9)3.1.3 活塞的加速度 (9)3.2曲柄连杆机构中的作用力 (10)3.2.1 气缸内工质的作用力 (10)4活塞组的设计 (10)4.1活塞体的设计 (11)4.1.1 活塞的工作条件和设计要求 (11)4.1.2 活塞的材料 (12)4.1.3 活塞头部的设计 (12)4.1.4 活塞裙部的设计 (16)4.2活塞销的设计 (18)4.2.1 活塞销的结构、材料 (18)4.2.2 活塞销强度和刚度计算 (19)4.3活塞销座 (20)4.3.1 活塞销座结构设计 (20)4.3.2 验算比压力 (20)4.4活塞环设计及计算 (20)4.4.1 活塞环形状及主要尺寸设计 (20)4.4.2 活塞环强度校核 (21)5连杆组的设计 (23)5.1连杆组的工况、基本设计要求与材料选择 (23)5.1.1、连杆组工作情况 (23)5.1.2、连杆组设计要求 (23)5.1.3、连杆组材料的选择 (24)5.2连杆结构与尺寸的确定与校核 (24)5.2.1 连杆长度的确定 (24)5.2.2连杆小头的结构设计与强度、刚度计算 (24)5.2.3 连杆杆身的结构设计与强度计算 (27)5.2.4 连杆大头的结构设计与强度、刚度计算 (30)6曲轴的设计 (33)6.1曲轴的结构型式和材料的选择 (33)6.1.1 曲轴的工作条件和设计要求 (33)6.1.2 曲轴的结构型式 (34)6.1.3 曲轴的材料 (34)6.2曲轴的主要尺寸的确定和结构细节设计 (35)6.2.1 曲柄销的直径和长度 (35)6.2.2 主轴颈的直径和长度 (35)6.2.3 曲柄的设计 (36)6.2.4平衡块 (36)6.2.5 油道的布置与油孔的位置和尺寸 (37)6.2.6 曲轴两端的结构 (37)6.2.7 曲轴的止推 (38)6.3曲轴的疲劳强度校核 (38)6.3.1 作用于单元曲拐上的力和力矩 (38)6.3.2 名义应力的计算 (43)结论 (45)参考文献 (46)致谢 (47)1绪论1.1国内外发展现状目前,应用最广、数量最多的汽车发动机为水冷、四冲程往复活塞式内燃机,其中汽油机多用于轿车和轻型客货车上,而大客车和中、重型货车发动机多为柴油机。
发动机曲柄连杆机构建模与仿真共3篇
发动机曲柄连杆机构建模与仿真共3篇发动机曲柄连杆机构建模与仿真1发动机是现代汽车的核心部件,而发动机的曲柄连杆机构是其重要组成部分。
曲柄连杆机构是将活塞的往复直线运动转化为曲柄的旋转运动,并将曲柄的旋转运动传递到汽车的传动系统,驱动汽车前进。
因此,对曲柄连杆机构的建模与仿真研究具有非常重要的意义。
建模是对一个系统或过程的抽象和简化,建立数学模型并用计算机仿真求解。
而曲柄连杆机构建模与仿真,是指在计算机软件的帮助下将传统的手工绘图、计算曲柄连杆运动轨迹的工作转化为计算机模型建立、仿真分析的过程。
这种方法的好处是可以大大提高计算效率,同时可以方便的进行参数化分析,探究系统的适用性以及其内部机制。
曲柄连杆机构建模的第一步是建立坐标系。
我们需要确定一个参考点,通常是发动机曲轴中心线。
接着,我们需要定义每个零件的位置,通过坐标系来描述。
例如,对于一个柄头与曲轴的配合,我们需要确定其位置和姿态。
曲柄连杆机构的建模需要包括曲轴、连杆和活塞。
在建模时,我们需要确定曲轴的几何尺寸和转动轴线的位置,这样才能计算出曲轴相对坐标系的位置和姿态。
对于连杆,我们需要定义其长度、部位的尺寸和材料以及其他参数,同时也需要考虑连杆的固定方式。
活塞建模需要考虑它的直径、长度以及密封件等参数。
建模完成后,我们需要用计算机软件来进行仿真分析。
在仿真分析时,需要输入相关的工作参数(如发动机的工况、所加载的载荷等),以获取系统在不同参数下的性能表现。
仿真分析主要包括如下几方面:(1) 运动学分析:通过对曲柄连杆机构中每个零件的几何形状和位置关系的分析,得出其运动轨迹,进而分析每个零件的运动状态。
(2) 动力学分析:通过对曲柄连杆机构在不同载荷下的工作性能的分析,得出曲轴、连杆及柄头的最大受力情况,从而进一步分析系统劳动寿命等相关参数。
(3) 模态分析:通过对曲柄连杆机构在工作条件下的振动模态进行分析,探究系统在不同频率下的振动特性以及如何减少或消除系统中的振动问题。
基于UG软件的四连杆运动仿真分析的研究报告
基于UG软件的四连杆运动仿真分析的研究报告基于UG软件的四连杆运动仿真分析的研究报告摘要:本文以UG软件为工具,对四连杆运动进行了仿真分析,并对仿真结果进行了详细的描述和分析。
通过仿真分析发现,在不同的驱动方式、不同的转动速度等条件下,四连杆的运动状态、角度变化等均有显著差异,同时也发现四连杆的运动过程中存在一定的瞬时速度过快的情况,需要考虑加装减速装置。
关键词:UG软件;四连杆运动;仿真分析;瞬时速度过快一、引言四连杆运动是一种常见的机械运动形式,在机械设计、运动分析等领域中有着广泛的应用。
如何对四连杆运动进行分析和仿真,是机械工程领域的重要研究方向之一。
本文通过UG软件对四连杆运动进行仿真分析,并对仿真结果进行了详细的描述和分析,旨在对四连杆运动的研究提供一定的参考。
二、四连杆运动的基本原理四连杆运动是由四个连杆构成的运动链条,其中一个连杆为驱动杆,其余三个连杆为被动杆。
四连杆的运动状态受到驱动杆的驱动方式、转动速度等多种因素的影响,需要进行参数化变量的分析和仿真模拟。
三、UG软件仿真模拟1. 模型建立:首先利用UG软件进行四连杆模型的建立,包括杆件的三维建模、连接约束、驱动方式的设定等,得到初始状态下的四连杆结构。
2. 运动仿真:根据仿真目标和要求,对四连杆进行运动仿真,设定不同的驱动方式、不同的转动速度等条件,得到不同条件下的四连杆运动状态。
3. 结果分析:通过对仿真结果的分析,得出不同条件下四连杆的运动规律、运动状态、角度变化等,并结合实际应用需求,对仿真结果进行进一步的优化和改进。
四、仿真结果分析通过UG软件进行四连杆运动仿真分析,得到如下结论:1. 被动杆与驱动杆的角度变化规律:随着驱动杆的转动,被动杆与驱动杆之间的连接杆件的角度也在不断变化,角度变化曲线为抛物线状。
2. 驱动方式的影响:采用不同的驱动方式,四连杆的运动状态亦有较大的差异。
以摆线轮驱动方式为例,该方式下四连杆的运动状态较为平稳、稳定。
基于UG的平面四连杆机构运动与仿真

毕业设计论文题目: 基于UG的平面四连杆机构设计及运动仿真专业名称机电设备维修与管理学生姓名李小军指导教师季祥毕业时间2011年7月毕业设计任务书指导教师:季祥一、设计题目用基于UG的空间四连杆机构设计及运动仿真二、设计的目的1)掌握UG的基本使用方法。
2)掌握四连杆机构的特点及虚拟装配的方法。
3)掌握UG中运动仿真的方法。
三、设计要求1)平面四连杆机构的三维造型。
2)平面四连杆机构的虚拟装配3)UG中平面四连杆机构的运动仿真。
4)仿真结果的分析四、完成的任务要求说明详细,字迹工整,原理正确,图纸规范,图形清晰,符号标准,线条均匀。
(1)设计与绘制平面四连杆机构,建立运动仿真的模型。
(2)毕业设计说明书(8000以上)1)设计题目2)四连杆机构原理说明3)四连杆机构的三维造型设计及虚拟装配4)UG的四连杆运动仿真5)设计总结及改进意见6)主要参考资料五、参考文献机械设计高等教育出版社主编濮良贵纪名刚机械原理高等教育出版社主编孙恒陈作模UG NX5.0中文版从入门到精通机械工业出版社主编胡仁喜、康士廷、刘昌丽目录摘要 (4)第1章绪论 (5)1.1 UG NX5的功能模块 (5)1.1.1 UG NX5用户界面 (5)1.1.2主要功能 (6)1.2 UG NX5的工作环境 (9)1.3 产品设计的一般过程 (12)1.4 三维造型设计步骤 (13)第二章平面连杆机构 (15)2.1 平面四杆机构的基本形式 (15)2.2 铰链四杆机构中曲柄存在的条件 (16)2.3 铰链四杆机构的演化 (17)第三章平面四杆机构的基本特性 (20)3.1 四杆机构的极位 (20)3.2 四杆机构从动件的急回特性 (20)3.3 平面连杆机构的传力特性 (20)3.4 死点位置 (21)第四章四连杆的三维造型 (22)4.1 机架的三维造型 (22)4.2 连架杆1的三维造型 (26)4.3 连架杆2的三维造型 (28)4.4 连杆的三维造型 (28)第五章四连杆的虚拟装配 (31)5.1 进入装配模块 (31)5.2 添加组件机架 (31)5.3 装配连架杆1 (32)5.4 装配连架杆2 (34)5.5 装配连杆 (35)第六章平面四连杆机构的运动仿真 (40)6.1 新建仿真 (40)6.2 新建连杆 (41)6.3 创建运动副 (43)第七章平面四连杆的运动仿真分析 (46)7.1 运动副图表分析 (46)7.2 死点位置 (49)结论 (51)致谢 (52)参考文献 (53)摘要UG NX是集CAD\CAE\CAM于一体的三维参数化软件,也是当今世界最先进的设计软件,它广泛应用于航空航天、汽车制造、机械电子等工程领域。
基于UG的四连杆机构的运动分析仿真[1]
![基于UG的四连杆机构的运动分析仿真[1]](https://img.taocdn.com/s3/m/05b9da0a2e60ddccda38376baf1ffc4fff47e243.png)
基于UG的四连杆机构的运动分析仿真[1]第24卷第4期轻工机械Vol. 24,No. 4.2006年12月L ight IndustryMachineryD ec. , 2006[研究·设计]基于UG的四连杆机构的运动分析仿真沈庆云,沈自林(图章注释新建图章 sun2008-9-27 17:58:05空白)(佛山科学技术学院,广东佛山528000)0 引言机构的运动分析,就是对机构的位移、轨迹、速度、加速度进行分析,根据原动件的运动规律,求解出从动件的运动规律。
由于机构的复杂性,用传统的方法分析机构的运动非常费时,且精度低。
本文以世界著名的CAD .CA E.CAM系统U nigraphics (简称U G )软件为工具,用计算机模型代替机构的实际模型,通过求解计算机模型,获得精确的机构运动参数,用图形和动画来模拟机构的实际运动过程,这是传统的分析方法所不能比拟的。
在UG的机构仿真模块(U G ScenarioforM otion)中嵌入求解器ADAM SKinem atics,可以对二、三维机构进收稿日期: 2005210231行复杂的运动学、动力学分析及设计仿真,分析产品的临界位置、反作用力、速度及加速度。
摘要:利用基于UG的机构运动分析模块,详细介绍了一套完整的四连杆机构的参数化建模设计、运动副的创建与运动仿真。
关键词:参数化建模;连杆机构;运动仿真中图分类号: TH 122 文献标志码:A 文章编号: 100522895 (2006) 04200742021 四连杆参数化建模与装配在这里预先设定四连杆的长度数据及几何造型如表1所示。
将表1各组件装配,即可形成1个四连杆机构(如图1)。
在计算机中创建连杆机构,将连杆1、连杆2、连杆3和机架分别创建成连杆。
图1 四连杆机构表1 四连杆基本参数2 创建运动副(J oints )考虑到所有连杆均作旋转运动,将建立4个旋转副,其中有2个旋转副与地固定(只要将机架设成与地固定即可实现)。
基于虚拟方法的发动机曲柄连杆机构优化设计

1 动力学模型的建立 111 参数化模型
在进行虚拟设计工作中 ,零件结构的修改与优 化经常要导致计算模型的重新建立与定义 ,这种重 复的工作浪费了大量的时间 。参数化模型把参数化 方法和特征技术有机地结合起来 [ 6 ] ,极大地提高了 优化设计的效率 。在参数化模型中 ,计算模型记录 零件之间的各种特征关系 ,当模型中某些零件结构 修改后 ,计算模型仅需读取修改的零件结构特征参 数 ,即可重新计算 ,更加快速获取数据 。本文将运用
运动和绕活塞销摆动的相对运动的复合 [ 7 ] ,这两种 运动都是变速运动 ,因此连杆的惯性力与力矩有 3 种 ,如图 2所示 。
表 1 发动机基本分析参数
发动机型号
480柴油机
缸径 ×冲程 (mm )
80 ×90
模拟转速 ( r/m in)
3600
连杆中心距 (mm )
145
曲柄连杆比
0. 31
曲轴角速度 ( rad / s)
曲柄连杆机构动力学分析系统的拓扑构型如图 1所示 。为了既能分析整个系统的平衡状况 ,又可 以对四缸中每一缸的受力情况进行单独分析 ,将曲 轴简化为四段相互连接的简支梁 。机体 (B )与车体 (A )固定连接 (L1 ) , 每段曲轴 ( C1 ~C4 )两端轴颈分 别与机体以轴承约束 (L2 ~L5 )与球约束 (L6 ~L9 )连 接 ,连杆 (D1 ~D4 )大头分别以转动约束 (L10 ~L13 ) 与曲轴连接 ,小头以球约束 (L14 ~L17 )与活塞连接 , 活塞 ( E1 ~E4 )又通过滑动约束 (L18 ~L21 )分别与机 体连接 。根据零件的材料和实际重量给定密度等材 料属性 ,在轴颈连接处施加恒角速度驱动 ,模拟发动 机在标定转速下稳定运转 。
基于UG软件平台的四连杆机构运动仿真分析

基于UG 软件平台的四连杆机构运动仿真分析3余振华(常州机电职业技术学院,江苏常州 213000)摘 要:在NX 草图环境下,对平面四连杆机构进行草图建模。
通过草图约束及尺寸动画功能确定各连杆的尺寸,之后在NX 运动分析环境下,建立相应模型并进行运动学分析,得出构件某点的运动轨迹及速度、加速度的变化规律。
关键词:UG NX;草图;平面四连杆机构;运动仿真中图分类号:T H133.5 文献标识码:A 文章编号:1006-4414(2010)01-0010-02M oti on sim ul a ti on ana lysis of four -bar li n kage ba sed on UG software Pl a tfor mYu Zhen -hua(Changzhou m achinery -electricity vocational technical college,Changzhou J iangsu 213000,China )Abstract:The paper deals with sketch modeling of the p lanar f our -bar linkage in the NX sketch envir on ment .Thr ough the sketch constraint and size cart oon functi ons t o deter m ine the size of each linkage,after that building corres ponding model and carried out kine matics analysis in the NX moti on analysis envir on ment .Itwas concluded that variati on of s ome point ′s traject o 2ry and s peed,accelerati on .Key words:UG NX;sketch;p lanar f our -bar linkage;si m ulati on1 前 言平面四杆机构是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到了广泛的应用。
基于UG发动机虚拟装配仿真分析

随着计算机技术和行业深入融合,虚拟装配技术作为一种装配过程仿真,将产品从零件、部装和总装过程用可视化方式呈现出来,极大地促进了产品装配效率提高,且可实现对装配过程的干预检查,避免了由于设计、工艺等因素发生问题,缩短了产品研制周期,提升了发动机前期装配工艺设计效率[1]。
1 虚拟装配概述虚拟装配基于计算机技术,可在无需实物产品前体下,对产品过程进行仿真装配,并且通过软件对产品所需零件进行3D建模,最终实现零件装配过程仿真。
在虚拟装配过程中,不仅可对产品进行装配过程演练、干涉分析以及装配次序优化,还可通过运动仿真来验证运动机构运行姿态和方式,使工艺和设计人员提前发现装配过程中存在的问题,优化产品结构,制定装配工艺路线,实现装配过程的可控性,达到提高装配质量和工作效率的目标。
2 基于UG平台某型船用发动机的装配2.1 装配过程某型船用发动机设计阶段基于UG平台,对发动机零件进行建模。
设计人员通过UGNX从基础零件开始进行自下而上、从内向外的装配,定位基准设为曲轴[2]。
2.2 装配后干涉检查UGNX装配完成后,对装配过程进行干涉检测,其中干涉检测主要包括静态和动态检测两个方面。
具体总结起来,大体包括4个部分:第一,没有干涉,表示部件或者零件接触面大于间隙值,如图1所示;第二,接触干涉,表明部件或者零件接触面互相接触但未发生干涉现象,此时系统会在接触面给出干涉区域供参考;第三,硬干涉,表明两个接触面之间有相互交错,此时系统会自动默认一个干涉实体;第四,软干涉,表明最小距离小于间隙区域,但不接触。
根据发动机结构和装配次序,主要采用静态干涉检查方法,通过UG模块对零部件进行间隙检测和分析,判断各个装配单元是否存在干涉情况,从而进一步预估零件设计和装配是否符合要求。
UG具有强大的干涉检查功能,可根据软件干涉检测情况,对干涉区域进行尺寸修订,此时装配单元和零件装配关系也会有相应的调整。
图1 无干涉部分3 装配仿真应用3.1 运动仿真动画仿真动画在UG装配工艺和原理基础上,以可视化方式对过程进行演示。
基于UG软件的四连杆运动仿真分析

基于UG软件的四连杆运动仿真分析UG软件是一款常用的CAD(计算机辅助设计)软件,它能够帮助工程师进行各种模型的建立、装配和分析。
在机械领域,UG软件被广泛应用于各类机械零部件的设计和仿真。
本文将就UG软件的四连杆运动仿真分析进行探讨,并详细介绍其原理、步骤及应用场景。
一、四连杆的基本概念四连杆是一种机械传动机构,由四条杆件和四个旋转副构成。
其中两条较长的杆件在一端旋转固定,称为地杆,另外两条较短的杆件同样旋转固定,称为摇杆。
四连杆的动作主要靠摇杆的运动驱动,使机械系统完成各种工作。
四连杆的工作原理强调套路重复的动作,即摇杆先向一个方向运动,然后再向另一个方向运动,执行往复的动作。
二、四连杆的运动仿真分析原理在使用UG软件进行四连杆运动仿真分析之前,我们需要了解一些基本原理。
首先,我们需要清楚地知道四连杆的各个参数,包括地杆长度、摇杆长度、连杆长度和摇杆旋转轴的位置等。
其次,我们还需要明确四连杆运动的动力学方程,即四个杆件的位置和速度之间的关系。
最后,我们需要掌握运动分析的方法,以便根据四连杆的参数和动力学方程,计算出各个杆件的位置和速度。
三、四连杆运动仿真分析的步骤1. 创建机械结构模型我们首先需要在UG软件中创建四连杆的机械结构模型,包括四连杆的杆件和旋转副等。
在创建过程中,需要设置结构的初始参数,如地杆长度、摇杆长度、连杆长度、摇杆旋转轴的位置等。
此外,还需要定义四连杆的运动路径和工作条件。
2. 定义杆件约束与运动学关系在创建四连杆的模型后,需要对杆件进行约束和位移关系的定义。
我们需要选择恰当的杆件,对其进行约束设置,确定其运动的自由度,以达到正确的运动效果。
同时,还需要定义杆件之间的运动学关系,解决各个杆件之间的相互作用问题。
3. 进行四连杆运动仿真完成约束和位移关系的设置后,我们就可以开始进行四连杆运动仿真。
在进行仿真前,我们需要确定仿真方案和仿真参数,如仿真时间、仿真速度和仿真环境等。
基于UG的机构动力学仿真方法

1.1 基于UG的机构运动仿真方法在“三维实体造型”等有关先修课中,我们学习了通过UG/Modeling建立三维实体模型的方法,本节主要介绍利用UG/Motion对机构进行运动仿真的方法。
UG/Motion是UG/CAE (Computer Aided Engineering)模块中的主要部分,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系即可建立一个运动仿真模型,之后可对运动机构进行装配分析、运动合理性分析,诸如干涉检查、轨迹包络等,得到运动机构的运动参数。
通过运动仿真验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:①建立一个运动分析场景; ②进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;③进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制; ④运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
1.1.1 运动仿真工作界面在UG的主界面中选择菜单【Application】→【Motion】,系统将会自动打开UG/Motion的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图6-25所示。
图6-25 UG/Motion 主界面运动仿真工具栏部分主要是UG/Motion各项功能的快捷按钮,包括连杆特性和运动副工具、载荷工具、运动分析工具以及运动模型管理工具等四类工具按钮,各按钮的功能如图6-26所示。
运动场景导航窗口部分主要是显示当前操作下处于工作状态的各个运动场景的信息,包括文件名称,运动场景的名称、类型、状态、环境参数以及运动模型参数等 。
运动场景是UG运动仿真的框架和入口,它是整个运动模型的载体,储存了运动模型的所有信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于U G 的发动机曲轴连杆机构的虚拟设计与运动仿真Engine Crank and Link Mechanism Virtual Designand Motion Animation B ased on UG韦尧兵 聂文忠(兰州理工大学机电学院,兰州 730050) 摘 要:三维模型虚拟设计是机械设计的必然趋势。
该文简述了三维设计软件U G NX110的强大功能,并且结合发动机曲柄连杆机构实现了模型的虚拟设计、虚拟装配及三维动态仿真。
关键词:虚拟设计 虚拟装配 三维动态仿真Abstract :Three -dimentional model virtual design is the tendency of mechanic design.The paper simply state its powerful function of U G NX110with three dimentional design soft ,and realize model virtual design 、virtual assembly and three -dimentional dynamic animation combined with engine crank and link mechanism.K ey w ords :virtual design virtual assembly three -dimentional dynamic animation作者简介:韦尧兵 1965年生,兰州理工大学机电工程学院副教授、硕士,甘肃省“555”创新人才工程人选。
研究方向为裂纹技术及其装备和CAD/CAM ,发表论文23篇,获省部级科技进步三等奖1项,厅局级科技进步二等奖1项。
聂文忠 1971年生,兰州理工大学机电学院在读研究生。
0 引言虚拟技术是近年来随着计算机辅助设计技术发展起来的一种新型技术。
随着计算机辅助技术的发展,传统的以AutoCad 为代表的二维设计越来越不能满足工业生产、设计的需求。
它不仅开发时间长,而且功能单一,设计过程中不能够及时地发现设计中存在的问题。
本文简要介绍了美国U GS 公司开发的U G 软件及其在虚拟设计中的应用。
1 UG 软件简介Unigraphics (简称U G )软件是美国U GS 公司的五大主要产品(U G ,Parasolid ,iMAN ,Solid Edge ,Product Vision )之一。
U G 软件起源于美国麦道飞机公司,并于1991年并入美国通用汽车公司EDS (电子资讯系统有限公司),因此,该软件汇集了美国航空工业及汽车工业的专业经验[1]。
U G 是一个高度集成的CAD/CAM/CAE 软件系统,可应用于整个产品的开发过程,包括产品的建模、分析和加工。
U G 不仅具有强实体造型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可进行有限元分析、机构运动分析、动力学分析和仿真模拟等,提高了产品设计的可靠性。
同时,可用建立的三维模型直接生成数控代码,用于产品的加工,其后处理程序能够支持多种类型的数控机床。
另外它所提供的二次开发语言U G/Open64机电一体化 Mechatronics 2005年第1期GRIP、U G/Open API简单易学,其函数功能较齐全,便于用户开发专用的CAD系统。
具体来说,该软件具有以下特点:(1)有统一的数据库,真正实现了CAD/ CAE/CAM等各模块之间的无数据自由切换,有利于并行工程的实施。
(2)采用复合建模技术,可将实体建模、曲面建模、线框建模、显示几何建模与参数化建模融为一体。
(3)用基于特征(如孔、凸台、型腔、槽沟、倒角等)建模和编辑方法作为造型基础,使虚拟物体形象直观,并能用参数驱动。
(4)曲面设计采用非均匀有理B样条作基础,可用多种方法生成复杂的曲面,特别适合于汽车外形设计、汽轮机叶片设计等复杂曲面造型。
(5)出图功能强,可十分方便地从三维实体模型直接地生成二维工程图。
能按ISO标准和国际标注尺寸、形位公差和汉字说明等,并能直接对实体做旋转剖、阶梯剖和轴测图挖切生成各种剖视图,增强了绘制工程图的实用性。
(6)以Parasolid为实体建模核心,实体造型功能处于领先地位。
目前著名的CAD/CAE/ CAM软件均以此作为实体造型内核。
(7)提供了界面良好的二次开发工具GRIP (graphical interactive programming)和U FUNC (user function),并能通过高级语言接口,使U GS 的图形功能与高级语言的计算功能紧密结合起来。
(8)具有良好的用户界面[2]。
2 发动机曲柄连杆机构的虚拟设计2.1 虚拟设计U G软件对三维实体造型提供了多种不同的实现方法,可以由用户灵活使用。
下面以发动机曲轴为例简述建模过程:运行U G,在application (应用)中选中modeling(建模)模块,通过cylinder (圆柱体)建立前端输出法兰,通过hole(孔)、instance(特征引用)、thread(螺纹)建立前端面的光孔和螺纹孔,通过basic curves(基本曲线)及revolve(旋转)建立前法兰里面的形状,通过basic curves(基本曲线)和extrude body(拉伸体)和unit (结合)建立第一、第二曲拐,通过建立datum plane(基准面)和instance(特征引用)中的mirror (镜像)建立第三、第四曲拐,再通过cylinder(圆柱体)和slot(键槽)等步骤建立后输出轴,最后通过edge blend(倒圆)和edge chamfer(倒角)建立曲轴的倒圆和倒角。
以类似的步骤对发动机曲柄连杆机构的其他部件建立三维模型,结果如图1所示。
图1 发动机曲轴三维模型2.2 虚拟装配U G虚拟装配功能特别强大,它可以使零部件灵活的配对和定位,并保持关联性。
对装配完成后的模型可以进行装配干涉分析,发现问题可以及时修改。
因为U G采用统一的数据库,可以在装配图或零件图中自动地进行相应的修改,因此极大地加快了产品的设计速度。
在三维模型完成后,通过application(应用)进入assembly(装配)模块完成机构的虚拟装配。
首先通过assembly(装配)下的component(组件)加入前面已经通过modeling(建模)模块建立的零件模型,再通过mating(配对)、align(对齐)、parallel(平行)等关系组装在一起,以实现机构间各运动件的相对确定位置。
其最终的装配关系及装配图如图2所示。
图2 发动机曲轴虚拟装配图2.3 运动仿真当零件装配成为一个系统之后,常常需要对机械作运动分析。
U G的运动分析模块(motion)可在屏幕上模拟真实的机构运动,并检查运动轨迹和运动干涉等三维动态仿真。
运动分析之前,需要对各零件和运动副进行定义。
运用的U G工具主要有构件(link)、运动副(joint)等,以及指定主动件的运动速度。
经过上述定义和编辑之后,74基于U G的发动机曲轴连杆机构的虚拟设计与运动仿真机构可实现三维运动仿真。
U G 通过ADMAS 解算器可计算机构的加载运动是否正确,interference 功能可检查机构的运动干涉,并用激活(interaction )选项,设定以高亮点来显示干涉部位,使运动分析结果一目了然。
动态仿真之前,先对每个零件编号,用motion (运动)模块下的link (构件)按钮,将每个零件按序设置为运动的最小单元。
然后用joint (运动副)按钮对这些单元之间的运动进行定义,建立起运动幅。
图2中发动机曲柄连杆机构的运动副主要有旋转副(revoute )、移动副(slider )等。
完成运动副定义之后,点击动画(animation )按钮,机构开始三维仿真运动,并可对仿真运动作干涉分析、运动分析及动力分析。
例如,利用animation 选项下的干涉(interference )项,检查运动干涉;用animation 选项下的marker/smartpoint 项,可以在构件上加标点,得到其运动过程的速度、加速度等参数变化;可用graphing 选项把运动参数传到excel 中绘制曲线图;还可以利用scenario 中的export 输出为MPEG 文件等。
其运动幅关系及运动仿真效果如图3所示。
图3 发动机曲轴三维动态仿真图3 结束语(1)用U G 作CAD 能更直观地反映零部件的实际形状,方便地实现复杂机构的虚拟装配及三维运动仿真,并对机械系统进行运动分析、干涉分析及方案评估等。
(2)与传统方法比较,U G 能更方便地对设计的产品进行装配,在装配分析中能够及时地发现设计中的问题,并能轻易地修改。
而且,装配好的三维模型可以直接地转换为二维图形并能生成数控加工代码。
因此,能够大大地加快产品的开发速度,从而降低产品的开发成本。
(3)用U G 实现复杂机构的三维运动仿真技术不仅能应用于CAD ,还可用来辅助教学CA I (computer aided instruction ),作为学生学习、实习、实验的课件,起到形象直观的教学效果。
参考文献1 王玉新编著.数字化设计.北京:机械工业出版社,20032 曾向阳,谢国明,王学平,等编著.U G NX 基础及应用教程.北京:电子工业出版社,20033 申永胜主编.机械原理教程.北京:清华大学出版社,1998简 讯Quick Logic 公司发布了一套进行低功耗设计的参考设计工具Quick Logic 公司日前发布了一套使用Eclipse ⅡFPG A 器件进行低功耗设计的参考设计工具套件(RD K )。
RD K 包括两块PCB 电路板,一块原型电路板上载有Eclipse ⅡFPG A 器件,另一块子卡用于测量功耗。
利用低功耗RD K ,设计师们能够访问Eclipse Ⅱ芯片上的每个I/O 管脚,并能方便地将其连接至调试工具、示波镜和逻辑分析仪。
用于功率测量的子板不仅能够分别显示Eclipse Ⅱ核心部分和I/O 部分的功耗,而且还能够分别显示不同I/O bank 的功耗。
84机电一体化 Mechatronics 2005年第1期。