双轮机器人车的仿真与控制软件研究
两轮自平衡机器人建模与仿真 (1)_fixed
两轮 自平 衡机器人的侧面构架如图 2-1所示。左右车轮分别由两个电机驱 动,以电机轴心线为中心前后转动。若以车身垂直地面为 0度,则车身可摆动 范围为一47度至47度。
当未 做 控 制时,不论车身向前倾斜或者向后倾斜,左右轮都是静止的状 态,也就是说车身前后摆动与车轮转动是相互独立的。
机器人在不同运动环境下的仿真模型;
(4) 在 ADAMS环境下进行两轮自平衡机器人的动力学仿真,获取并分
析在不同运动环境下两轮 自平衡机器人的关键性能参数; (5) 设计 两轮同步模糊控制器,将两轮 自平衡机器人的仿真模型导入
MATLAB,实现两轮同步控制仿真。
哈尔滨工业大学工学硕士学位论文
哈尔滨工业大学工学硕士学位论文
Abstract
Th ec on cepto ftw o-wheeleds elf-balancingr obotw aso riginateda tth ee nd ofth e1 990s.I tb elongsto t hec ategory ofau tomatedw heelro botan dc ombines thei deao fa utonomousm oving.B ecauseo fit sd elicacya ndd exterity,t wo- wheeleds elf-balancingr oboti sfi tf orw orkingi nt hen arrow andd angerous space.I tca nb eu sedw idelyi nt hem ilitarya ndc ivilre alm int hef uture.
通过 对 两 轮 自平衡机器人的建模与仿真分析,证明了两轮自平衡机器人 能够满足要求的动态特性,获得了相应的动力学仿真结果数据,为实际工作 提供了理论依据和数据参考:同时验证了两轮 自平衡机器人结构设计的合理 性,研制了两轮 自平衡机器人本体。
两轮移动机器人论文:两轮移动机器人平衡控制系统的研发

两轮移动机器人论文:两轮移动机器人平衡控制系统的研发【中文摘要】两轮移动机器人是轮式机器人的一个分支。
由于其体积小,运动灵活等优点,在多个领域有重要的用途;同时由于它具有非线性,多变量耦合,欠驱动等特点,因而成为各种高级控制算法的理想验证平台,对它的研究有着重要的学术价值。
本文旨在设计开发完整的两轮移动机器人的实验平台,为两轮移动机器人的应用和研究提供实验系统。
本文主要的工作内容包含如下:(1)对两轮移动机器人进行运动学和动力学分析,为总体设计提供了理论依据。
(2)在硬件系统设计中基于快速原型思想,以DSP芯片为控制核心,设计完成了控制电路和直流电机驱动电路。
本文设计的硬件系统接口丰富,扩展性强,同时支持MATLAB/Simulink环境下的快速开发调试。
(3)在软件系统设计中采用了卡尔曼滤波原理和LQR控制原理,实现了传感器噪声信号的过滤和对机器人平衡运动的控制。
(4)针对目前DSP的算法开发主要依赖手工编写C代码,不但工作量大,而且程序的下载依赖于专门的昂贵的仿真器的问题,本文提出并实现了基于MATLAB/Simulink环境的DSP算法开发,并利用串口通信实现程序下载的综合方案。
该方案能很好地利用MATLAB现有的功能模块,通过图形化编程实现对硬件的控制和控制算法设计,大大降低了DSP的算法开发难度,利用RTW技术,可将算法模型自动生成C代码,提高了设计开发的效率。
利用串口通信下载调试程序,方便有效,节约了系统开发的成本。
(5)最后在两轮移动机器人系统上完成直流电机的闭环控制和两轮移动机器人的平衡控制实验。
实验结果表明,本文设计的两轮移动机器人取得较理想的平衡控制效果,从而验证了两轮移动机器人系统设计的合理性和可靠性。
【英文摘要】Two-wheeled moving robot is a part of the wheeled robots.The robot is flexible and small,so it has a large foreground in all kinds of application.Otherwise the robot is a nonlinear and multi-variables system,it is a good test bed for many control algorithms.To supply a convenient experiment system for researching and developing on this robot,this paper research and design a two-wheeled moving robot system.This paper’s major job include:(1). establish the mathematical model for the analysis of the robot.(2). Based on the rapid prototyping thinking,this paper design controller with DSP,and driver for DC motor.The hardware has interfaces and provides link with MATLAB/Simulink.(3). The software designs Kalman Filter to filter the noise in sensors and Linear Quadratic Regulator control algorithms to make the robot move in balancing.(4). Besides, To reduce developers’heavy programming C code for developing control algorithms and emulator for downloading program, a MATLAB/Simulink-based rapid development and downloading by serial communications method was designed. The developers use existing blocks inMATLAB to build control model, and generate directly executable codes through Real-Time Workshop function of MATLAB. Downloading code by serial communications interface can reduce the cost.(5). The expetiments validate the hardware and software at the end of this paper.The experiments include DC motor speed control,two-wheeled moving robot balance control.The results show the efficacy of the algorithms,and provide that the system in this paper is reliable.【关键词】两轮移动机器人平衡控制 LQR控制算法倾角【英文关键词】two-wheeled moving robot balancing control LQR control algorithms angle【目录】两轮移动机器人平衡控制系统的研发摘要6-7Abstract7第1章绪论10-17 1.1 研究背景和意义10-11 1.2 国内外研究现状11-15 1.2.1 国外研究现状11-13 1.2.2 国内研究现状13-14 1.2.3 研究趋势分析14-15 1.3 本文主要内容15-16 1.4 本章小结16-17第2章系统总体设计17-28 2.1 机器人数学模型17-21 2.1.1 机器人驱动电机模型17-18 2.1.2 机器人车轮模型18-19 2.1.3 机器人车身运动模型19-20 2.1.4 机器人模型分析20-21 2.2 总体架构设计21-27 2.2.1 硬件系统总体设计22-26 2.2.2 软件系统总体设计26-27 2.3 本章小结27-28第3章硬件系统开发28-42 3.1 系统方案比较28-29 3.2 控制电路开发29-35 3.2.1 最小控制单元开发29-31 3.2.2 采样电路开发31-33 3.2.3 串行接口开发33-35 3.3 驱动电路开发35-40 3.3.1 PWM驱动原理35-37 3.3.2 H桥式电路原理37-38 3.3.3 驱动电路实现38-40 3.4 硬件设计总成40-41 3.5 本章小结41-42第4章软件系统开发42-66 4.1 算法设计42-49 4.1.1 卡尔曼滤波设计42-44 4.1.2 平衡控制算法设计44-49 4.2 基于MATLAB的开发平台设计49-56 4.2.1 快速开发方法49-50 4.2.2 硬件驱动模块开发50-53 4.2.3 开发环境配置53-56 4.3 串口下载56-65 4.3.1 数据流56-61 4.3.2 引导函数61-63 4.3.3 程序下载实现63-65 4.4 本章小结65-66第5章实验研究66-73 5.1 电机闭环速度控制实验66-68 5.1.1 程序实现66-67 5.1.2 实验结果及分析67-68 5.2 机器人平衡控制实验68-72 5.2.1 程序实现68-71 5.2.2 实验结果及分析71-72 5.3 本章小结72-73总结73-74致谢74-75参考文献75-79攻读硕士期间发表的论文79。
双轮平衡车的控制系统硬件设计方案小车机器人论文
摘要双轮自平衡车是一个高度不稳定两轮机器人,是一种多变量、非线性、绝对不稳定的系统,需要在完成平衡控制的同时实现直立行走等任务因其既有理论意义又有实用价值,双轮自平衡小车的研究在最近十年引起了大量机器人技术实验室的广泛关注。
本文主要介绍了双轮平衡车的控制系统硬件设计方案。
此方案采用ATmega328 作为核心控制器,在此基础上增加了各种接口电路板组成整个硬件系统,包括单片机最小系统,姿态检测模块,直流驱动电机控制模块,电源管理模块,测速编码模块,串口调试等模块。
对于姿态检测系统而言,单独使用陀螺仪或者加速度计,都不能提供有效而可靠的信息来保证车体的平衡。
所以采用一种简易互补滤波方法来融合陀螺仪和加速度计的输出信号,补偿陀螺仪的漂移误差和加速度计的动态误差,得到一个更优的倾角近似值。
本文先阐述了系统方案原理,再分别就各模块工作原理进行详细的介绍与分析,最终完成车模的制作和电路原理图以及1PCB 板的绘制。
最后根据调试情况对整个系统做了修改,基本达到设计要求。
关键词双轮自平衡车模块设计传感器AbstractTwo-wheeled self-balanced car is a highly unstable robots, it is a system with Multivariable, nonlinear and absolute instability, it needs to complete the balance control tasks such as walking upright because of both theoretical significance and practical value. Two-wheeled self-balanced car in the last decade has aroused widespread concern in the robotics laboratory.This paper describes the control system hardware design of the wheel balanced car.This program uses ATmega328 as the core controller,base on this increase of various interface circuit board to building the hardware system. Peripheral circuits including the smallest single-chip system, the gesture detection module, the DC drive motor control module, power management module, velocity encoding module and serial debugging module. For the posture monitoring system,the information solely depends on the gyroscope or the accelerometer couldn’t make sure the balance of vehide.So the signals from the gyroscope and accelerometer were integrated by a simple method of complementary filtering for an optimal angle to compensate the gyroscope drift error and the accelerometer dynamic error.This article first describes the principle of the system program,then described in detail each module how to working out, the final completion of car models produced and circuit schematics and the PCB drawing.In the end, according to debug the situation on the whole system changes, the hardware system basically reached the design requirements.Keywords two-wheeled self-balanced car modular design sensor目录前言 (1)第1章绪论 (2)1.1 设计的依据与意义 (2)1.2 国内外同类设计的概况综述 (3)1.3 设计要求与内容 (3)第2章总体硬件方案设计 (5)2.1 总体分析 (5)2.2 总体方案设计 (5)2.3 方案框图 (7)第3章单元模块设计 (8)3.1 姿态检测模块 (8)3.2 单片机控制单元模块电路 (14)3.3 电机驱动模块 (19)3.4 串行通信模块 (21)3.5 电源管理模块 (24)结论 (26)参考文献 (27)致谢 (28)附录 (29)前言自平衡车自动平衡运作原理主要是建立在一种被称为“动态稳定”(DynamicStabilization)的基本原理上,也就是车辆本身的自动平衡能力。
两轮自平衡小车的模糊滑模控制研究的开题报告

两轮自平衡小车的模糊滑模控制研究的开题报告第一部分:研究背景随着科技的迅速发展,人们对机器人的需求也越来越大。
而两轮自平衡小车作为其中一种机器人,被广泛应用于各个领域,如军事、安防、医疗、物流等。
在这些领域中,自平衡小车需要能够稳定运行,并具有高精度和高速度的控制能力。
因此,如何实现自平衡小车的精确控制成为当前的研究热点之一。
在自平衡小车控制领域,目前流行的控制方法包括PID控制、模糊控制、神经网络控制等。
其中,模糊控制是一种以模糊集合和模糊规则为基础的控制方法,具有适应性强、灵活性高、在环境变化时能有效地应对等优点。
而滑模控制则是一种对系统动态特性强鲁棒性的控制方法。
第二部分:研究目的与意义本研究旨在结合模糊控制和滑模控制两种控制方法,研究两轮自平衡小车的模糊滑模控制。
通过建立自平衡小车的数学模型,设计模糊滑模控制器,并在MATLAB/Simulink中进行仿真实验,验证控制算法的有效性和鲁棒性。
本研究的意义在于探究一种新的自平衡小车控制方法,以提高自平衡小车的运动精度和鲁棒性,并为未来进一步研究奠定基础。
第三部分:研究内容和方案本研究的研究内容和方案分为以下几个步骤:1. 自平衡小车动力学建模通过对两轮自平衡小车的动力学特性进行分析,建立自平衡小车的运动方程,同时对系统进行状态空间描述,得到系统状态方程。
2. 模糊滑模控制设计基于自平衡小车的数学模型,设计模糊滑模控制器。
其中,模糊控制器通过分析系统输出与期望输出之间的误差,引入模糊规则进行调节;滑模控制器则通过引入滑模面使系统在特定区域内运动,并消除外部扰动的影响。
3. MATLAB/Simulink仿真实验将控制算法输出的控制信号和系统状态方程输入到MATLAB/Simulink模拟平台中,进行仿真实验。
在仿真过程中,模拟外部扰动和干扰,以验证控制算法的鲁棒性和有效性。
第四部分:预期成果通过本研究的探究,预计能够得到以下预期成果:1. 建立两轮自平衡小车的数学模型,并验证模型的准确性;2. 设计模糊滑模控制器,并验证控制算法在控制小车运动中的有效性、鲁棒性和适应性;3. 通过仿真实验,验证控制算法的实用性和优越性。
机器人控制系统的建模与仿真方法研究

机器人控制系统的建模与仿真方法研究随着科技的不断进步,机器人技术的发展迅猛,机器人在各个领域的应用越来越广泛。
为了实现高效、稳定的机器人行为控制,建立准确的控制系统模型和进行仿真研究是至关重要的。
本文旨在探讨机器人控制系统的建模与仿真方法,介绍常用的建模方法,并分析仿真模型的建立及其应用。
一、机器人控制系统的建模方法1. 几何模型法几何模型法是一种常用的机器人控制系统建模方法。
该方法通过描述机器人的几何形状、关节结构和运动轨迹,建立机器人系统的几何模型。
常用的几何模型包括DH法、SDH法和Bishop法等。
其中,DH法是最经典的一种方法,通过参数化建立机器人的运动学模型,用于描述关节变量和坐标系之间的关系,从而实现机器人的运动规划和控制。
2. 动力学模型法动力学模型法是一种更加复杂而全面的机器人建模方法。
该方法基于牛顿运动定律和动力学原理,综合考虑机器人的质量、惯性、关节力矩和外力等因素,建立机器人系统的动力学模型。
动力学模型法可以更准确地描述机器人的运动和力学特性,对于复杂的机器人控制任务具有重要意义。
3. 状态空间模型法状态空间模型法是一种抽象程度较高、数学表达简洁的机器人控制系统建模方法。
该方法通过描述机器人系统的状态以及状态之间的转移规律,以矩阵的形式进行表示。
状态空间模型法适用于系统动态特性较强、多输入多输出的机器人系统,能够方便地进行控制器设计和系统分析。
二、机器人控制系统的仿真方法1. MATLAB/Simulink仿真MATLAB/Simulink是一种广泛应用于机器人控制系统仿真的工具。
Simulink提供了丰富的模块库和仿真环境,可以方便地构建机器人系统的仿真模型,并进行系统的可视化、实时仿真和参数调整。
通过Simulink,我们可以对机器人的运动学和动力学模型进行建模,并通过调整控制参数来优化机器人的控制性能。
2. 三维虚拟仿真三维虚拟仿真是一种直观、真实的机器人控制系统仿真方法。
基于ADAMS和MATLAB的两轮机器人平衡仿真研究
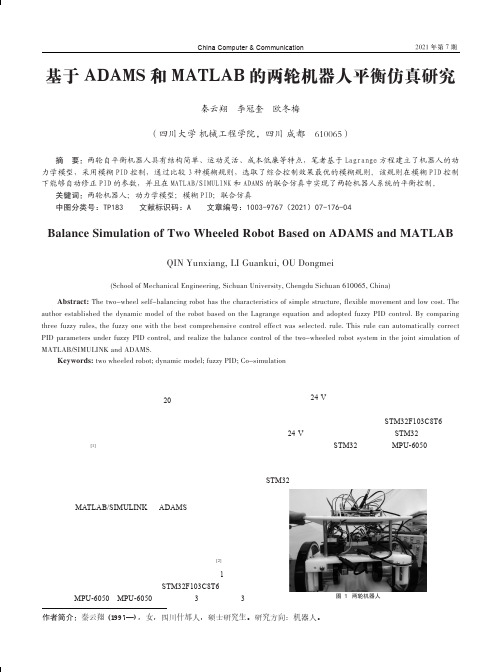
图1 两轮机器人(1997—),女,四川什邡人,硕士研究生。
研究方向:机器人。
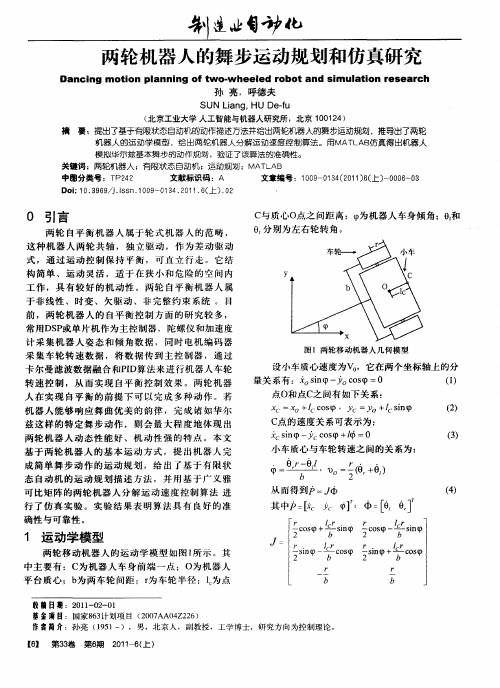
图2 简化的两轮机器人 运动学模型、v y 、v z 是平面内机器人在各个坐标轴上的分量,车体重心与底盘轴的距离,m 为机器人的总重量,θ为机器人的倾斜角度,θ·l 为左轮的角速度,θ·r 为右轮的角速度,为机器人左右轮速度不一致导致的航偏角,R 为车轮半径。
左右轮的前进速度分别为:lR θ −= rR θ −= 机器人的前进速度为:2rl v v +=()() +−−+++r l z r l z 2mR +m R m f J R mR m R m f J R 2mR +m l R 2+J 4444444222222l 2图3 模糊PID控制原理框图图4 模糊PID子模块图5是在MATLAB中设置的模糊规则。
模糊规则以模糊语言的形式描述人们的知识和经验,以规定的形式反映专家的经验和知识集。
一般情况下,模糊规则以“If条件then 结果”的形式,将模糊输入语言变量转化为模糊输入语言变量。
该形式化表示的模糊规则在很大程度上符合人们通过自然语言对知识进行描述的习惯[13]。
模糊规则一般会影响模糊PID的最终控制效果,所以模糊规则的选择十分重要。
引入模糊PID控制的目的是根据制定的模糊规则得到3个参数的修正值,这样PID控制器就能根据系统响应主动调整参数,可提高系统的动态响应性能和鲁棒性。
图5 模糊规则4 联合仿真和系统分析不同的模糊规则会影响模糊PID的控制效果,所以笔者在仿真实验中选用3种不同的模糊规则进行比较。
实验的大致步骤:利用ADAMS和MATLAB/SIMULINK联合仿真,从ADAMS中导出两轮机器人的机械系统,然后用MATLAB/ SIMULINK将其打开,在SIMULINK中搭建仿真环境。
4.1 联合仿真系统设计ADAMS和Matlab的联合仿真过程如下:在ADAMS/ View中建立两轮机器人简化模型,包括机体、车轮和路面,因为建模时将机器人的电机、驱动等部件略去,所以会在左右轮上施加一定的力矩来驱动机器人运动。
两轮平衡机器人控制系统设计与仿真研究

两轮平衡机器人控制系统设计与仿真研究作者:韩竺秦张丽娜来源:《软件导刊》2019年第03期摘要:介绍了两轮自平衡机器人研究现状,建立系统动力学模型,并用MATLAB进行仿真验证控制方法的有效性。
设计了自平衡机器人控制系统,包括软件和硬件系统。
传感器采用陀螺仪以及加速度检测两轮自平衡机器人重力方向的倾斜角度和车轮的旋转加速度。
经过STM32控制器处理后,采用LQR最优控制策略控制电机调整车轮状态使机器人保持平衡。
通过实验样机验证了自平衡机器人控制策略的可行性。
关键词:STM32;两轮平衡机器人;LQR控制策略;动力学控制;传感器DOI:10. 11907/rjdk. 181995中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2019)003-0086-050 引言针对两轮机器人运动平衡的控制方法研究较多[1-5],如日本的Naoji Shiroma等[6]提出协作行为概念,应用多倒立摆机器人协作搬运物体,人与机器人协作实现物体搬运。
机器人由底部的一台伺服电机驱动实现直线运动,平衡控制采用极點配置方法。
瑞士联邦工学院的Grasser等[7]制造了一个名为JOE的两轮机器人。
这是一款采用DSP控制的机器人,以陀螺仪作为姿态检测传感器,通过测得的角速度进行积分而获得倾角。
台湾中兴大学Shui-Chun等[8-9]设计的两轮自平衡机器人,姿态测量采用倾角计和陀螺仪实现。
控制方法是先采用传统的PID控制,然后在同一平台利用神经网络和自适应滑模控制方法实现控制。
两轮自平衡机器人位置和姿态信息一般选择陀螺仪、加速度计、倾角计、测距仪等传感器获取[10-11],通过数据融合得到准确的位姿信息。
采用PID或极点配置法进行平衡控制,也有少数采用模糊控制[12]。
两轮自平衡机器人具有多变量、非线性、强耦合、时变、参数不确定性等特性,其平衡控制研究一直是热点。
由于该系统为欠驱动系统,运动学方程不能完整地描述系统行为且系统不可控,因此要解决两轮自平衡机器人系统的平衡问题就必须考虑动力学影响[5]。
两轮机器人的舞步运动规划和仿真研究
( 北京工业大学 人工智能与机器人研究所 ,北京 1 O 2 O l4)
摘
要 :提出了基于有限状态自动机的动作描述方法并给出两轮机器人的舞步运动规戈 ,推导出了两轮 0
机器人的运动学模型 ,给 出两轮机器人分解运动速度控制 算法 。用MAT A 仿真得 出机器人 L  ̄
模 拟华 尔兹 基 本 舞 步 的 动作 规 划 ,验 证 了 该算 法 的 准确 性 。
I
甸 出
两轮机器人的舞 步运动规划和仿真研究
Danci ot on pl ng m i anni g w o- heel obot and s m ul i es n of t w ed r i at on r ear ch
孙 亮 ,呼德 夫
SUN L a g. .u i n HU De f
器人 左转4 。 。其 他 的符号 以此 类推 。 5 机 器 人状 态 集 合 , 即 机 器 人 车 身 朝 向状 态 集
合为 Q { , LR F ,R,LB = FB,,,L F B ,R) 其 中 ,F 示 向前 方 向 ( owod 表 F r r ),B表示 向
后方 向 ( c w r ),L Bak ad 表示 向左 方 向 ( et , L f) R表 示 向右 方 向 ( ih ),F 表 示 左前 方 向 ,F Rg t L R 表示 右 前方 向 ,B 表示 左 后方 向,B 表 示 右 后方 L R
所示 。
两轮 机器 人 的符号 集合 为 :
』 { 4 , , 3 , 5 … ,c6, 4, , 30c5 … , . ,, 5… 6 ‘4, F30 l 5 … 6r , 0 a Ⅱ 4
3 ,4 …,3 ,“ , S 6 S 5 S 6 b 6 5 l6 S4 …,d0 c , c0 } 0 , co 5 3 , 4 …, 3  ̄
基于虚拟现实技术ODE的双轮自平衡机器人的仿真实现

摘要两轮自平衡机器人,具有多变量、非线性、强耦合和参数不确定等特点,这使得它成为验证各种控制算法的理想平台。
同时它运动灵活、结构简单,有着广泛的应用前景。
两轮自平衡机器人能够完成多轮机器人无法完成的复杂运动及操作,特别适用于工作环境变化大、任务复杂的场合。
开展两轮自平衡机器人的研究对于提高我国在该领域的科研水平、扩展机器人的应用背景等具有重要的理论及现实意义。
虚拟现实是人们通过计算机对复杂数据进行可视化操作与交互的一种全新方式,与传统的人机界面以及流行的视窗操作相比,虚拟现实在技术思想上有了质的飞跃。
应用虚拟现实技术可以对双轮自平衡机器人的动态性能进行更直观的观测,可操控性也更强。
本文使用虚拟现实技术ode,在虚拟环境中搭建双轮自平衡机器人模型,运用PID 算法和LQR算法实现了对机器人的控制。
通过实验验证了算法的可行性,直观地展示了机器人的基本运行功能,分别实现了一下控制实验:1.自平衡控制2.抗干扰实验3.定点控制4.速度跟踪控制5.直线越障实验6. 航向控制实验结果显示所设计的两轮自平衡机器人能够满足实时地动态特性要求,验证了两轮自平衡机器人结构设计的合理性以及机器人运动的有效性。
并直观对比出两种算法在控制效果上的差异。
关键词:两轮自平衡机器人;虚拟现实;PID算法;LQR算法AbstractTwo-wheeled self-balancing robot has the characteristics of multivariable, nonlinear, strong coupling and parameter uncertainty, etc. This makes it an ideal verification platform for a variety of control algorithms. Meanwhile, due to its flexibility and simplicity, it have broad application prospects. Two-wheeled self-balancing robot can complete the complicated movements and operations, especially for the occasions of large changes in the working environment and complex tasks. It has important theoretical and practical significance to carry out the research of two-wheeled self-balancing robot for improving our level of scientific research in this area and expanding the application of robotics backgrounds. Virtual reality is a completely new way of doing visual interactive manipulation to complex datum through computers. Compared with the traditional man-machine interface and the popular windows operating, virtual reality has a qualitative leap in technology and thinking. People can have more intuitive observation and more control of dynamic performance of two-wheeled self-balancing robot with Virtual reality technology.Using virtual reality technology ODE and establishing the model of two-wheeled self-balancing robot in a virtual environment, this article uses PID algorithm and LQR algorithm for robot control. Experimental results showed the robot's basic operating functions. The following control experiments were carried out respectively:1. Self-balance control;2. Anti-interference;3. Position control4. Speed tracking;5. Experimental linear obstacle;6. Heading control;Experimental results showed that the designed two-wheeled self-balancing robot could meet the dynamic characteristics of real-time requirements and verify the rationality of structural design and the efficiency of robot movement. It also intuitively contrasted the differences between two algorithms directly on the control effects.Keywords : two-wheeled self-balanced robot, Virtual Reality, PID algorithm , LQR algorithm目录摘要 (I)Abstract (II)目录 (III)第一章绪论 (1)一.虚拟现实技术的发展 (1)1.虚拟现实技术 (1)2.国内虚拟现实技术研究现状 (1)3.虚拟现实技术的发展趋势 (1)4.虚拟现实软件 (2)二.机器人的发展状况 (3)三.本课题的研究内容和意义 (4)四.本章小结 (4)第二章虚拟现实技术ODE (5)一.虚拟现实技术ODE功能 (5)二.虚拟现实ODE世界 (5)1.动力学世界 (5)2.刚体 (6)3.刚体的链接和约束 (7)4.碰撞处理 (7)5.力聚集 (8)6.摩擦力、及其他性能模拟 (8)7.ODE的应用程序框架 (8)三.虚拟现实ODE文件的创建步骤 (8)四.本章小结 (9)第三章双轮直立机器人的分析与数学模型 (10)一.双轮直立机器人系统分析 (10)二.双轮机器人数学模型建立 (10)1.数学模型的建立 (10)2.双轮机器人参数 (12)三.基于MATLAB的轮式机器人仿真模型的建立 (13)四.本章小结 (14)第四章双轮直立机器人控制算法设计及仿真实现 (15)一.基于PID的轮式机器人控制 (15)1.控制参数整定 (16)2.MATLAB环境下控制器搭建 (16)二.基于LQR的轮式机器人控制 (25)1.控制参数整定 (25)2.MATLAB环境下控制器搭建 (26)三.本章小结 (29)第五章虚拟现实ODE下轮式机器人控制实现 (30)一.虚拟现实环境下的机器人模型建立 (30)1.创建动力学世界和刚体 (30)2.设置刚体参数和状态 (30)3.创建关节与链接刚体和关节 (31)二.虚拟现实环境下的控制算法实现 (33)1.虚拟现实下轮式机器人线性PID算法实现 (34)2.虚拟现实下轮式机器人非线性PID算法实现 (42)3.虚拟现实下轮式机器人LQR算法实现 (48)三.遇到的问题以及解决方案 (51)1.虚拟现实环境下的参数测量 (51)2.仿真数据的导出 (53)3.干扰的加入方法 (53)四.本章小结 (54)结论 (55)致谢 (56)参考文献 (57)附录 (58)源程序代码 (58)第一章绪论一.虚拟现实技术的发展1.虚拟现实技术虚拟现实(Virtual Reality),简称VR;又译作灵境、幻真)是近年来出现的高新技术,也称灵境技术或人工环境。
双足机器人的行走控制与仿真
双足机器人的行走控制与仿真双足机器人是一种复杂的人造机器人,它可以模拟人类的步态进行行走。
在当今科技的发展中,双足机器人的应用越来越广泛,例如在残疾人康复、足球比赛和军事领域等方面都起着重要的作用。
为了实现双足机器人的高效和安全行走,需要进行行走控制和仿真的研究。
一、双足机器人的行走控制在双足机器人的行走控制中,主要有以下几个方面的技术:1. 步态规划步态规划是指为双足机器人规划一套合理的步态方式,让机器人可以稳定地进行行走。
在步态规划中,需要考虑足端和身体的着地位置、步态周期、步幅和步速等因素。
通过这些规划,可以使双足机器人实现更加灵活、平稳的步态。
2. 动力学控制动力学控制是指控制机器人进行行走时,根据机器人当前的状态、环境变化和任务需求,及时调整机器人的姿态,实现稳定的步态。
在动力学控制中,需要考虑机器人的平衡性、稳定性和动态性。
3. 路径跟踪控制路径跟踪控制是指通过计算机控制双足机器人的步伐,由计算机控制机器人按照预设的路径进行行走。
这种控制方法可以更加稳定地控制机器人步态,减少机器人的倒地风险。
二、双足机器人的仿真双足机器人的仿真是指通过计算机模拟实际的机器人操作和环境,以验证双足机器人的行走控制算法和策略。
通过仿真,可以更加准确地评估双足机器人的性能,从而为实际应用提供优秀的参考。
1. 建立仿真模型建立双足机器人的仿真模型是仿真的首要步骤。
在建立仿真模型时,需要考虑双足机器人的几何结构、质量、动力学特性等因素。
通过数学建模和仿真建模软件,可以构建出一个符合实际情况的双足机器人模型,以便进一步进行仿真分析和测试。
2. 仿真分析仿真分析是通过模拟实际情况,测试控制算法和策略的有效性。
在仿真分析中,可以模拟不同的运动状态、环境因素和操作要求,验证不同的控制方案和策略。
仿真分析可以大幅度缩短实际测试时间和成本,并可以重复测试以进行验证。
3. 仿真优化双足机器人的仿真优化是指通过仿真结果分析,改进双足机器人的行走控制算法和策略,提高双足机器人的稳定性、灵活性和交互性。
两轮自平衡机器人平衡控制仿真与研究

两轮自平衡机器人平衡控制仿真与研究李世光;王文文;申梦茜;高正中【摘要】To solve the balance instability problem of the two-wheeled self-balance robot,this paper established a dynamics mathematical model of robot and designed a controller based on variable universe fuzzy-PID.With micro-controller ARM STM32F103 as its core,a hardware platform was built and the principle and method of controlling parameters for two-wheeled self-balance robot were described in detail to achieve the balance control of the two-wheeled self-balance robot system.The simulation results show that with faster response speed,higher regulating precision and strong anti-interference ability,the two-wheeled self-balance robot based on variable universe fuzzy-PID can improve the static and dynamic performance and robustness of the system.%针对两轮自平衡机器人的平衡不稳定问题,建立了机器人动力学数学模型,设计了一种基于变论域的模糊PID控制器,以ARM的微控制器STM32F103为核心,搭建硬件平台,详细阐述两轮自平衡机器人控制参数整定的原理和方法,实现了两轮自平衡机器人系统的平衡控制.仿真结果表明:基于变论域模糊PID控制的两轮自平衡机器人响应速度快、抗干扰能力强,能够更好的减小超调量,提高系统的动静态特性和鲁棒性.【期刊名称】《山东科技大学学报(自然科学版)》【年(卷),期】2016(035)006【总页数】6页(P76-81)【关键词】两轮自平衡机器人;数学建模;变论域;模糊PID【作者】李世光;王文文;申梦茜;高正中【作者单位】山东科技大学电气与自动化工程学院,山东青岛 266590;山东科技大学电气与自动化工程学院,山东青岛 266590;山东科技大学电气与自动化工程学院,山东青岛 266590;山东科技大学电气与自动化工程学院,山东青岛 266590【正文语种】中文【中图分类】TP242两轮自平衡机器人是移动机器人研究中的一个重要领域,因其运动灵活、适应地形变化能力强等特点,可胜任一些复杂环境的工作。
两轮自行车机器人锁把平衡定位控制仿真
双轮机器人控制系统论文:基于stm32的双轮机器人控制系
双轮机器人控制系统论文:基于STM32的双轮机器人控制系统研究与设计【中文摘要】自美国发明家Dean Kamen于1995年发明设计了第一台平衡机器人Segway以来,平衡机器人便受到人们极大的关注。
它的特点是两个车轮共轴,可差动运动,依照倒立摆原理达到动态平衡。
但是平衡车发展到现在,它的应用领域仅限于交通领域,而且价格不菲。
此外,由于平衡机器人是一个非线性、不稳定的系统,处于平衡状态时,需要不断调整车轮的扭矩,这样系统就会处于耗电状态,一旦电量不足就会失去平衡。
因此,如何使平衡机器人在功能丰富的同时降低成本,以及如何节约宝贵的电池电量成为了本文重点研究的课题。
为此,本文提出了基于STM32的双轮机器人,对控制系统重新设计,它的特点是在不需要工作的时候,可遥控关闭系统,使系统处于休眠状态,达到节能的。
需要工作的时候可遥控启动系统,平衡机器人可借助机械臂自动恢复平衡。
在功能扩展方面,增加了LCD显示,并将开源实时操作系统μCOS-Ⅱ应用到了平衡机器人中,为今后其它功能扩展留有了很大的余地。
成本控制方面,选用了性价比较高的元器件,满足平衡机器人的性能的同时达到成本低廉的。
本文具体完成的工作主要体现在以下几个方面。
1)使用四个舵机,将其中两个舵机改造成伺服电机驱动平衡机...【英文摘要】Since the American inventor Dean Kamen designed the first balancing robot (Segway) in 1995, it has been greatconcern by the people. It is characterized by a total of two wheel shaft, differential movement, in accordance with principles of dynamic equilibrium of inverted pendulum. Until now, it is limited to transportation applications, and expensive. In addition, the robot is a nonlinear and unstable system. When it is in balance, it needs to continuously adjust the torque wheel. So the system will be in p...【关键词】双轮机器人控制系统 STM32 陀螺仪加速计μCOS-Ⅱ Kalman滤波 PID【英文关键词】Control system of two-wheeled robot STM32 Gyroscope Accelerometer μCOS-Ⅱ Kalman fliter PID【目录】基于STM32的双轮机器人控制系统研究与设计摘要4-6Abstract6-7第1章绪论10-14 1.1 移动机器人概述10 1.2 国内外双轮平衡机器人的历史与现状10-12 1.3 课题的研究目的与意义12-13 1.4 本文的研究内容与组织结构13 1.5 本章小结13-14第2章平衡机器人的力学模型14-18 2.1 力学模型14-16 2.2 本章小结16-18第3章平衡机器人控制系统硬件设计18-46 3.1 控制系统硬件总体设计方案18-19 3.2 加速计19-22 3.2.1 加速计原理19 3.2.2 加速计MMA7260QT结构19-20 3.2.3 加速计参数分析与电路设计20-22 3.3 陀螺仪22-25 3.3.1 陀螺仪原理与特性22-23 3.3.2 陀螺仪ADXRS300结构23-24 3.3.3 陀螺仪参数分析与电路设计24-25 3.4 编码器25-26 3.4.1 编码器的作用25 3.4.2 编码器设计25-26 3.5 舵机与舵机控制器26-29 3.5.1 舵机原理26-27 3.5.2 舵机改造27-28 3.5.3 舵机控制器28-29 3.6 遥控器29-34 3.6.1 遥控器简介29 3.6.2 遥控器发射器参数分析与电路设计29-32 3.6.3 遥控器接收器参数分析与电路设计32-34 3.7 LCD显示屏34-37 3.7.1 ILI9320简介34-35 3.7.2 ILI9320参数分析与电路设计35-37 3.8 主控制器37-44 3.8.1 STM32简介37-39 3.8.2 STM32 ADC参数分析与电路设计39-40 3.8.3 STM32串口参数分析与设计40-41 3.8.4 STM32中断参数分析与设计41-43 3.8.5 平衡机器人总体电路设计43-44 3.9 机械臂的设计44-45 3.10 本章小结45-46第4章平衡机器人控制系统软件设计46-65 4.1 控制系统软件总体设计方案46-47 4.2 Kalman算法47-53 4.2.1 Kalman简介48 4.2.2 Kalman算法原理48-50 4.2.3 Kalman算法代码实现50-53 4.3 平衡算法53-54 4.4 PID算法54-57 4.4.1 PID算法原理54-55 4.4.2 PID算法代码实现55-57 4.5 实时操作系统μCOS-Ⅱ57-63 4.5.1 μCOS-Ⅱ简介57-58 4.5.2 μCOS-Ⅱ的重要概念58-59 4.5.3 μCOS-Ⅱ在STM32上的移植59-63 4.6MDK简介63-64 4.7 结果分析64 4.8 本章小结64-65第5章总结与展望65-66参考文献66-68致谢68-69附录69下面是赠送的保安部制度范本,不需要的可以编辑删除谢谢!保安部工作制度一、认真贯彻党的路线、方针政策和国家的法津法规,按照####年度目标的要求,做好####的安全保卫工作,保护全体人员和公私财物的安全,保持####正常的经营秩序和工作秩序。
《移动两轮机器人的张量积模型变换控制器设计》范文
《移动两轮机器人的张量积模型变换控制器设计》篇一一、引言随着科技的不断进步,移动两轮机器人逐渐成为自动化、智能化的重要工具。
其广泛应用于家庭服务、物流运输、救援救援等领域。
然而,移动两轮机器人的控制问题一直是研究的热点和难点。
本文旨在设计一种基于张量积模型的变换控制器,以提高移动两轮机器人的运动性能和稳定性。
二、移动两轮机器人概述移动两轮机器人主要由电机、轮子、传感器等部分组成。
其运动方式主要依靠两个轮子的转动实现前进、后退、转向等动作。
由于两轮机器人的结构特点,其运动学模型较为复杂,控制难度较大。
三、张量积模型介绍张量积模型是一种描述多变量系统动态行为的数学工具。
它可以将高阶系统降阶为低阶系统,从而简化控制器的设计过程。
在移动两轮机器人的控制中,张量积模型可以有效地描述机器人的运动学特性,为控制器的设计提供理论依据。
四、控制器设计4.1 模型建立首先,根据移动两轮机器人的运动学特性,建立其张量积模型。
该模型应包括机器人的速度、加速度、角速度等变量,以及电机转矩、轮子摩擦力等影响因素。
4.2 控制器设计思路基于张量积模型,设计变换控制器。
该控制器应能够根据机器人的当前状态和目标状态,计算出合适的控制信号,以实现机器人的稳定运动。
控制器的设计应考虑机器人的非线性特性、外界干扰等因素,以提高其鲁棒性和适应性。
4.3 控制器实现控制器实现主要包括两个部分:硬件实现和软件实现。
硬件实现主要包括电机驱动器、传感器等部分;软件实现则包括控制算法的实现和优化。
在实现过程中,应充分考虑实时性、精度等因素,以保证控制器的性能。
五、实验与分析为了验证控制器的性能,进行了一系列实验。
实验结果表明,基于张量积模型的变换控制器能够有效地提高移动两轮机器人的运动性能和稳定性。
在不同速度、不同路况下,机器人均能实现稳定运动,且具有较好的鲁棒性和适应性。
六、结论本文设计了一种基于张量积模型的变换控制器,用于移动两轮机器人的控制。
两轮移动机器人平衡控制系统的研发的开题报告

两轮移动机器人平衡控制系统的研发的开题报告摘要:本文介绍了一种基于单片机嵌入式系统的两轮移动机器人平衡控制系统的设计和研发。
首先,分析了该系统的物理模型,并根据模型建立了控制模型。
其次,分别设计了控制器的硬件和软件实现,并且详细阐述了控制器的各个模块之间的交互过程。
最后,利用PID控制算法进行了仿真实验,并得到了良好的控制效果。
关键词:移动机器人、平衡控制、单片机、PID控制一、研究背景和意义随着科学技术的不断发展,移动机器人的应用越来越广泛。
移动机器人通常具有高机动性、灵活性和智能化等特点。
但是移动机器人的控制较为复杂,其中平衡控制是机器人运动控制中的关键问题之一。
因此,研究移动机器人平衡控制技术具有重要的理论和实际意义。
针对上述问题,本文研发了一种基于单片机嵌入式系统的两轮移动机器人平衡控制系统。
该系统具有优良的控制性能和实用性,可以为移动机器人的运动控制和应用提供技术支持和借鉴。
二、系统设计原理1. 系统物理模型分析该系统由两个直径相同的轮和一个控制一个转子构成(如图1所示)。
设机器人的角速度为ω,前轮中心到机器人中心的距离为l,转子的电流为u,转子的自旋角速度为ν,则系统的运动学模型可以描述为:ω=(vr-vl)/2lυ=(vr+vl)/2其中,vr和vl分别为右轮和左轮的线速度。
此外,根据机器人的运动学模型,可以得到机器人的控制模型:Mω+Kυ=μu其中,M为机器人的惯性矩,K为机器人的阻尼系数,μ为电机的转矩系数。
2. 系统控制器设计(1)硬件设计该系统的硬件控制器由传感器、执行器和单片机组成。
其中,传感器包括两个陀螺仪和一个加速度计,用于测量机器人的倾角和加速度;执行器为直流电机,用于控制机器人的运动。
单片机采用STM32F103C8T6型号,具有高性能、低功耗、强的存储和处理能力,可以满足该系统的控制要求。
(2)软件设计该系统的软件控制器采用C语言编写,分为两层:底层驱动程序和上层控制程序。
双轮自平衡机器人行走伺服控制算法研究

双轮自平衡机器人行走伺服控制算法研究孙亮,王嶷然,于建均,阮晓钢(北京工业大学人工智能与机器人研究所, 北京 100022)摘要:为了解决双轮自平衡机器人行走伺服控制问题,本文设计了一种基于mamdani型模糊推理规则的模糊控制器。
并且使用这种模糊控制器在双轮自平衡机器人硬件平台上完成了两个实验。
一是以恒定倾斜角行走为控制目标的行走伺服控制,二是以恒定速率行走为控制目标的行走伺服控制。
实验结果表明,本文设计的模糊控制器可以很好的解决双轮自平衡机器人行走伺服控制问题。
关键词:双轮自平衡机器人;行走伺服控制;模糊控制中图分类号:TP 文献标识码:AThe Motion Servo Control Algorithm Research on Equilibrate Robot(Institution of Artificial Intelligence and Robot, Beijing Polytechnic University, Beijing100022, China)SUN Liang, WANG Yi-ran, RUAN Xiao-gangAbstract: In this paper, the dual wheel equilibrate robot motion servo control is our concern. We design the controller which uses the fuzzy mamdani reasoning rule table. Based on the controller mentioned above, we focus on the constant tilt angle and constant motion speed control. From the results of the experiments, the fuzzy controller shows a good dynamic performance.Key words: Dual Wheel Equilibrate Robot; Motion Servo Control; Fuzzy Control1 引言移动机器人学是机器人学的一个重要分支,主要研究在复杂环境下机器人系统的实时控制问题。
基于ADAMS的两轮机器人运动研究(终结)

北京工业大学学士学位论文基于ADAMS的两轮机器人运动研究学院电子信息与控制工程学院专业自动化姓名王治国学号07020133指导老师孙亮2011年05月20日摘要机器人(ROBOT)是人类设计出来为替代人进行工作的机器。
两轮机器人结构简单、运动灵活、适合在狭小和危险的空间内工作,在各个领域有着广泛的应用。
两轮机器人的概念是20世纪90年代提出来的,属于轮式机器人的范畴。
文章旨在利用ADAMS(机械动力学仿真系统)研究两轮机器人的运动情况,阐述了两方面内容:第一是利用MATLAB对机器人模型进行分析,确定各项运动参数和受力,根据分析结果设计控制系统,使得机器人系统能够平衡,进而在平衡基础上有规律运动。
两轮机器人是一个非线性、不稳定的系统,其运动学原理和倒立摆相同。
为了方便研究,首先把两轮机器人模型简化为倒立摆,进行受力分析和控制方案设计,再在MATLAB环境下对倒立摆控制情况进行SIMULINK仿真,进而拓展为对两轮机器人的控制;第二是完成MATLAB仿真后,学习ADAMS 理论知识,再根据MATLAB分析结果,结合实际情况,在ADAMS环境下设计出两轮机器人模型,添加控制约束,模拟机器人运动情况。
仿真结果显示,此次设计对两轮机器人的控制达到了预期目标,控制效果良好,实现了两轮机器人在ADAMS环境下的平衡和运动控制,改善了系统的不稳定性能,调节时间短,抗干扰能力强,直观地观察到了两轮机器人在ADAMS环境下的运动情况。
关键词:两轮机器人MATLAB ADAMS 运动研究倒立摆abstractRobot is a man who designed the work carried out for alternative products. Wheeled robot is a simple structure, flexible movement, suitable for small and dangerous work space robot, in all fields have a wide range of applications. The concept of two wheeled robot is presented to the 20th century, 90 years, belonging to the scope of wheeled robots.Article aims to use ADAMS (Mechanical Dynamics Simulation System) to study the movement of two robots, described two aspects: first, the robot model using MATLAB analysis to determine the parameters of the movement and force, based on an analysis Control system were designed so that the robot system to balance, then the balance on a basis of regular exercise. Two wheeled robot is a nonlinear and unstable system, the kinematic theory and the same inverted pendulum. To facilitate the study, the first two rounds of the robot model to be simplified as an inverted pendulum, the force analysis and control design, and then in the MATLAB environment, the situation on the inverted pendulum control SIMULINK simulation, and then expanded to the control of two robots; The second is the completion of MATLAB simulation, the learning of theoretical knowledge ADAMS, MATLAB analysis according to the results with the actual situation in the ADAMS environment to design two robot model, add the control constraints, simulated robot movement.Simulation results show that the design of two robot control to achieve the expected goal, the control works well, achieving a two wheeled robot ADAMS environment in balance and movement control, to improve the unstable performance of the system, adjust the time is short Anti-interference ability, directly observed two robot movement ADAMS environment.目录摘要............................................................................................................................. - 2 - abstract ........................................................................................................................ - 3 - 第一章绪论............................................................................................................... - 5 - 第一节两轮机器人简介及研究背景................................................................... - 5 - 第二节两轮机器人的发展和成果 ...................................................................... - 6 - 第三节两轮机器人应用 .................................................................................... - 8 - 第二章机械系统运动学分析ADAMS .........................................................................- 10 - 第一节ADAMS介绍 .........................................................................................- 10 - 第二节ADAMS的发展和应用 ...........................................................................- 11 - 第三节ADAMS主要模块功能 ...........................................................................- 13 - 第三章两轮机器人建模和运动控制算法研究.............................................................- 15 - 第一节模型简化问题.......................................................................................- 15 - 第二节倒立摆系统 ..........................................................................................- 15 - 第三节建模方法介绍.......................................................................................- 16 - 第四节状态空间数学模型................................................................................- 19 - 第五节系统可控性分析 ...................................................................................- 20 - 第六节四阶参考模型法控制 ............................................................................- 22 - 第七节LQR法控制...........................................................................................- 24 - 第四章基于ADAMS的两轮机器人模型实现 ..............................................................- 27 - 第一节创建新模型 ..........................................................................................- 27 - 第二节创建双轮机器人模型 ............................................................................- 27 - 第三节建立运动约束.......................................................................................- 33 - 第四节创建接触..............................................................................................- 35 - 第五节加入旋转力矩.......................................................................................- 37 - 第六节更改质量参数.......................................................................................- 38 - 第五章基于ADAMS的两轮机器人控制设计 ..............................................................- 40 - 第一节变量的创建 ..........................................................................................- 40 - 第二节基于ADAMS的PID算法的实现.............................................................- 42 - 第三节参数整定..............................................................................................- 45 - 第六章基于ADAMS的两轮机器人运动仿真 ..............................................................- 46 - 第一节ADAMS仿真 .........................................................................................- 46 - 第二节基于ADAMS的两轮机器人仿真结果分析 ..............................................- 47 - 第七章总结与展望 ...................................................................................................- 48 - 致谢............................................................................................................................- 49 - 主要参考文献..............................................................................................................- 50 -第一章绪论第一节两轮机器人简介及研究背景机器人(Robot)是能经过人类设计出来,然后实施控制而代替人的动作的机器。
两轮机器人实验报告

机电综合实验报告两轮机器人姓名:付文晖班级:车辆工程二班学号: 20110402216同组成员:张彬 20110402203平梦浩 20110402103 2014年12月目录一、实验目的.................................................. - 2 -二、实验设备.................................................. - 2 -三、实验内容.................................................. - 2 -四、实验原理.................................................. - 2 -4.1、实验平台——C51+AVR 控制板........................... - 2 -4.2、开发平台——Keil μVision2........................... - 4 -4.3、开发辅助工具——USBASP程序下载器软件................ - 5 -4.4、机器人定速巡航与日字行走............................. - 6 -4.5、机器人触须导航....................................... - 7 -4.6、机器人红外导航....................................... - 8 -五、实验过程及结果........................................... - 10 -5.1、定速巡航与日字行走.................................. - 10 -5.1.1、直线向前行走.................................. - 10 -5.1.2、向左转1/4圈.................................. - 10 -5.1.3、向右转1/4圈.................................. - 10 -5.1.4、向后退........................................ - 11 -5.1.5、日字行走...................................... - 11 -5.2、触须导航............................................ - 13 -5.2.1、实验准备...................................... - 13 -5.2.2、安装胡须...................................... - 13 -5.2.3、测试胡须...................................... - 14 -5.2.4、触须导航程序.................................. - 14 -5.3、红外导航............................................ - 17 -5.3.1、搭建IR发射和探测器对......................... - 17 -5.3.2、为何要使用三极管9013 ......................... - 18 -5.3.3、测试红外发射探测器............................ - 18 -5.2.4、红外导航程序.................................. - 19 -六、实验心得................................................. - 22 -一、实验目的1、掌握两轮机器人的工作方式、触觉开关及红外导航的工作原理。
平行双轮电动车的建模与控制仿真
( 6) ( 7)
图 3 系统模型
Ewk2 = 2 ×
v2 1 ω rm Jw 2 w = Jw 2 R2
式中 , M 为车轮的质量 ; J w 为车轮的转动惯量 ; R 为车轮
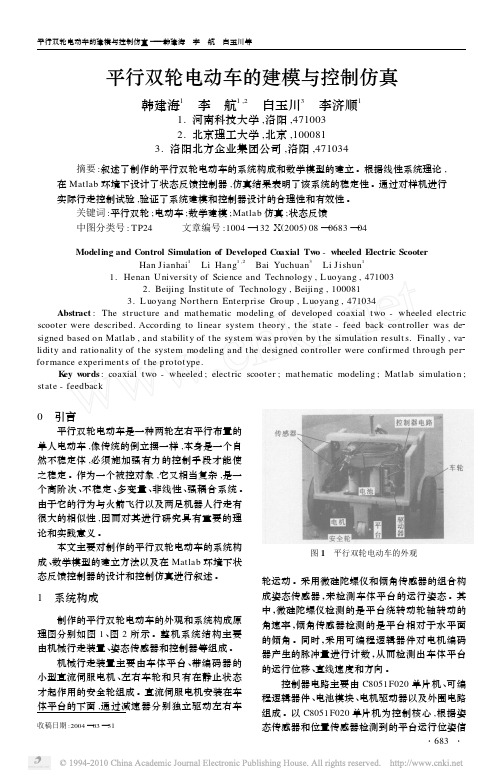
由图 3 可以看出 , 该系统具有 3 个自由度 :绕 Y 轴的俯仰运动 , 俯仰角θ p 和俯仰角速度ω p ;沿 X 轴的直线运动 , 位移 x rm 和移动速度 vrm ; 绕 Z 轴的 ω β。 摆动运动 , 摆动角β 以上 6 个状 z 和摆动角速度 态变量完全描述了该三自由度系统的动态特性 。 另外 , 作用在电动车质量中心的干扰角度θ d 表示 了电动车质量中心位置变化引起的外部干扰 。 对 θ 于实际尺寸的电动车 , d 由站立在平台上驾驶者 身体重心的变化而引起 。 系统的平衡靠电机施加 在左右轮轴上的驱动力矩 TL 和 T R 来控制 。 ・684 ・
place ( ) 函数求出 。
式中 , qi 为系统的广义坐标 ; E 为系统的动能函数 ; F 为耗 散能函数 ;U 为势能函数 ;τ i 为与广义坐标 q i 对应的广 义力 。
通过仿真和实际控制经验 , 将整个闭环系统 的闭环极点配置为
P1 = [ - 5 . 29 , - 5 + 3j , - 5 - 3j , - 12 ]
车轮的总动能为ewk相加得系统的总动能系统的总位能计算由于车轮的势能无变化仅考虑车体平台的势能则系统的总势能可表示为mglcosp中国机械工程第16卷第8期2005月下半月系统耗散能量可表示为为车体平台与车轮轴之间的摩擦系数
平行双轮电动车的建模与控制仿真 — — — 韩建海 李 航 白玉川等
将式 ( 9) ~ 式 ( 11) 代入式 ( 12) 可得描述被 控系统动特性的二阶非线性微分方程组 。 考虑在 θ θ θ co s p = 0 处的线性化 , 即取 sin p ≈θ p 、 p ≈ 1 ,并 2 忽略高次项 ω p , 可得二阶线性微分方程组
基于PID与LQR的两轮平衡小车控制算法的仿真研究_李洋

第6期(总第169期)2011年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672-6413(2011)06-0007-02基于PID与LQR的两轮平衡小车控制算法的仿真研究李 洋,梁义维(太原理工大学机械工程学院,山西 太原 030024)摘要:两轮平衡小车是一种非线性、强耦合、多变量的系统,是检验各种控制方法处理能力的典型装置。
在ADAMS与MATLAB软件平台下,应用PID与LQR两种控制算法对两轮平衡小车的控制效果进行研究。
研究表明:LQR的控制效果较好,适应性更好。
关键词:两轮平衡小车;PID与LQR;控制算法;仿真中图分类号:TP24∶TP391.9 文献标识码:A收稿日期:2011-06-15;修回日期:2011-06-20作者简介:李洋(1985-),男,山西永济人,在读硕士研究生,主要研究方向:故障诊断。
0 引言两轮平衡小车是轮式移动机器人的一种,是一个具体的、复杂的类倒立摆系统。
本文在ADAMS中建立平衡小车的机械简化模型,实时接收由MATLAB传送给ADAMS的控制数据,形成控制系统与检测系统的控制回路,并应用PID与LQR两种控制算法对小车进行控制效果的研究。
1 平衡小车模型的建立ADAMS中有两种建模方式:一种是在Pro/E中建立模型,然后导入ADAMS中;一种是利用ADAMS中的工具箱进行建模。
本文利用ADAMS中的工具箱进行两轮平衡小车模型的搭建,搭建好的小车简化模型如图1所示。
2 PID与LQR控制模块的建立两轮自平衡小车的联合仿真系统包括两个部分:ADAMS/Control生成的小车机械模型部分和在MATLAB中建立的PID及LQR控制策略。
图2为平衡小车的PID控制结构图。
PID控制策略是工业控制中最为广泛的一种控制方法,PID控制策略中的Kp(比例系数)、Ti(积分时间常数)、Td(微分时间常数)是通过经验法来确定的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
mu l a .D y n a mi c a l s i mu l a t i o n c a n b e d o n e c o n v e n i e n t l y u n d e r d i f f e r e n t p a r a me t e r s u s i n g t h i s s o f t w a r e,i n c l u d i n g d y —
YUAN Ye. D0NG Yu n- z h a o
( S c h o o l o f B u s i n e s s I n f o r m a t i o n ma n a g e m e n t , S h a n g h a i I n s t i t u t e o f F o r e i g n T r a d e , S h a n g h a i 2 0 1 6 2 0 , C h i n a )
ABS TRACT: T h e o p t i mi z a t i o n p r o b l e ms o f t wo - wh e e l e d r o b o t v e h i c l e d y n a mi c p r o p e r t i e s we r e r e s e a r c h e d i n t h i s p a - p e r .F l e x i b i l i t y a n d i n t e r e s t i n g a r e d e ma n d e d,b e c a u s e o f h i 【 g h d y n a mi c a l a c c u r a c y r e q u i r e me n t s ,a n d a n e a s y - u s e d s o f t w a r e,w h i c h c a n p r e d i c t t h e d y n a mi c l a p r o p e r t i e s a n d t e s t c o n t r o l p a r a me t e r s ,i s n e e d e d i n t w o — w h e e l e d r o b o t v e — h i c l e d e s i n .F g u t r h e mo r r e,t h e r e a r e t h e p r o b l e ms t h a t t h e c a l c u l a t i o n s o f i n e r t i a p a r m e a t e r s v a i r a t i o n s a r e n o t a c c u —
r a t e i n d y n a mi c a l s i mu l a t i o n .I n o r d e r t o i mp r o v e t h e p e r f o r ma n c e s ,t wo - wh e e l e d r o b o t v e h i c l e d y n a mi c s a n d c o n t r o l
第3 0 卷 第9 期
文章 编号 : 1 0 0 6 — 9 3 4 8 ( 2 0 1 3 ) 0 9 — 0 3 2 2 — 0 5
计
算
机
仿
真
2 0 1 3 年9 月
双 轮 机 器 人 车 的仿 真 与控 制软 件 研 究
袁 野, 董云朝
( 上海对外 贸易学 院商务信 息学 院, 上海 2 0 1 6 2 0 ) 摘要 : 研究双轮机器人动态性能优化设计 问题 , 双轮机器人车要求 具有灵活性 和趣味性 , 由于 动态精度要求 较高 , 在双 轮机 器人车 的设计 中, 还缺少一个使用方便 、 计算准确 的计算和控制 参数试验 的软件工具 。另外 , 在 动力学仿真 中 , 还存 在对惯 性参数变化 的计算不够精确等 问题 。为提高性能 , 提 出在细致推导动力学模型 , 及惯性参数计算公式的基础上 , 开发了双轮 机器人 车的动力学仿真 与控制软件 , 软件可方便地进行不 同参数下 的动力学仿真计算等功能 , 包括可尝试不 同结 构参数 、 惯 性参数 、 初 始状态、 阻力、 控制参数 下的计算功 能。通 过实例对 软件进行 了检验 和尝试 , 并研究 了车轮大小 、 爬 坡等对 电机驱
动力矩的需求规律 , 结果表明 , 设计 的软件可方便 地为机器人车的研制 提供有 力的支持 。 关键词 : 双轮机器 人车 ; 仿真软件 ; 动力学模 型 ; 控制算法
中图分类号 : T P 2 4 2 . 3 文献标识码 : B
St ud y o n Two -whe e l e d Ro bo t Ve h i c l e Si mu l a t i o n a n d Co nt r o l So f t wa r e
s i mu l a t i o n s o f t w re a w e r e d e v e l o p e d b a s e d o n t h e d y n a mi c a l mo d e l d e iv r a t i o n a n d i n e r t i a p ra a me t e r c o mp u t a t i o n l a f o r -