基于单片机的电加热炉温度控制系统设计
基于单片机的炉温温度控制系统设计
摘要在工业生产过程中,往往需要对各类加热炉、热处理炉、反应炉的温度进行检测和调节,因此需要一种合适的系统对其温度进行精确控制。
由于单片机具有低功耗、高性能、可靠性好、易于产品化等特点,因此采用单片机对温度进行控制不仅节约成本,控制方法灵活多样,并且可以达到较高的控制精度,从而能够大大提高产品的质量,因此单片机被广泛应用在中小型控制系统中。
自动控制技术尤其是温度控制技术在国内外得到广泛的应用和发展。
时滞效应始终困扰着其实际应用,为此人们发明了多种控制方法来解决时滞问题,例如比例控制方式、DDC控制方式。
本文将针对一种温度控制方式进行学习,并设计一个以AT89S52单片机为核心、利用新型集成化智能1-Wire总线数字温度传感器DS18B20实现的温度采集控制系统,同时还阐述了直接数字控制(DDC)控制算法。
本系统按照模块化程序设计思想,完成了对系统软件部分的设计,给出了各个功能模块的设计思想和流程图。
温度采集控制系统不但能够准确地进行温度数据的采样转换,稳定进行升温、恒温的控制过程,而且可以记录温度—时间对应关系,并以现今广泛使用的液晶显示器作为输出设备,使数据读取更加直观。
现场仿真表明,该系统在测试过程中工作稳定,满足设计要求。
本设计采用以8位AT89S52单片机作为系统的CPU。
使用电加热器升温,配合键盘输入,液晶显示器显示。
具有硬件结构简单、人机界面友善、管理功能健全、系统可靠性高、记录数据准确、使用维护方便等优点。
关键字:温度采集系统;单片机;DS18B20;温度控制The Design of Furnace Temperature Control System Based onSingle Chip MicrocomputerAbstractIn the industrial production process, often require various types of furnace, heat treatment furnace, reactor temperature detection and regulation, so it needs a proper system of precise control of its temperature. as low power consumption single chip, high performance, reliability, easy-to-market commodity and so on, so to control the temperature using SCM not only save on cost, control method of flexible and diverse, and can achieve higher precision, which can greatly enhance the quality of the product, so SCM is widely used in the Small control system.The automatic control technique is a temperature particularly controls technique at domestic and international get the extensive application with develop. Time postpone effect perplex always in fact on the occasion of applied, for this person invents various controls method to resolve the problem of Time postpone. This paper introduces a design of temperature data acquisition system based on single-chip AT89S52. The system collects temperature data through 1-Wire Digital Thermometer DS18B20, and the control algorithm of DDC parameters is presented.This system according to mold a design for turning procedure design toughing, completing to system software part of designs, giving each function mold piece thought with flow chart. A function temperature control system can proceed accurately the data adopts the kind converts, stabilizing the proceeding heat, the control process of the constant temperature, and can satisfy completely to the request of the system accuracy. and can show them to the operators by the way of the Liquid Crystal Display. This system used the present the usage the LCD and actions output equipments, make data kept the view more. The results of the simulation show that the system works stably and meets the expected design requirements.The temperature data acquisition and control system adoption with 8 bit AT89S52 single a machine for system CPU. The usage electricity heating apparatus heats, matching with the keyboard importation, displays with the LCD. It has simple structure, high system reliability, and the data recorded are reliable and the operation and maintenance are convenient.Key words: temperature data acquisition system; single-chip; DS18B20; temperature control目录1 绪论 (1)1.1 课题背景 (1)1.2 选题的目的和意义 (2)1.3 炉温控制的国内外研究现状及发展趋势 (2)1.4 本系统的任务和本文的主要内容 (4)2 系统总体分析与设计 (5)2.1 系统方案选择 (5)2.1.1 主控芯片单片机的选型 (5)2.1.2 温度传感器的选择 (5)2.2 系统的组成和工作原理 (6)2.3 系统主要元件介绍 (7)2.3.1 AT89S52单片机简介 (7)2.3.2 1602液晶显示器 (10)2.3.3 DS18B20数字温度传感器 (14)2.3.4 固态继电器 (18)2.4 本章小结 (19)3 硬件系统设计 (20)3.1 单片机的最小应用系统 (20)3.2 温度采集转换系统 (21)3.3 升温驱动控制系统 (22)3.4 键盘显示系统 (23)3.5 报警系统 (25)3.6 系统电源模块 (26)3.7 本章小结 (27)4 软件系统设计 (28)4.1 软件总体设计 (28)4.2 系统初始化函数 (29)4.3 控制函数 (30)4.4 读温度子程序 (31)4.5 键盘显示函数 (32)4.6 时间函数 (33)4.7 本章小结 (34)5 系统的调试与仿真 (35)5.1 软件调试 (35)5.2 硬件调试 (36)5.3 本章小结 (37)6 结论 (38)致谢 (39)参考文献 (40)附录1 (1)附录2 (18)1 绪论1.1 课题背景及时准确地得到温度信息并对其进行适时的控制,在许多工业场合中都是重要的环节。
基于单片机PID算法的电加热炉温度控制系统设计
基于单片机 PID算法的电加热炉温度控制系统设计摘要:电加热炉的温度控制具有升温单向性,大惯性,时变性,纯滞后等特点,其控温过程存在非线性波动等问题。
本文采用AT89C51单片机基于PID算法设计了一种电加热温度控制系统。
仿真实验表明,本系统能够有效提高电加热炉温度控制的鲁棒性,符合新形势下对炉温调控的实际需求。
关键词:电加热炉;温度控制;单片机;PID算法1引言电加热炉在冶金、化工、机械等领域具备广泛的用途,但是它是一个多时变、存在物理耦合、本质非线性的复杂系统,传统的基于滞后反馈的控制律无法平衡炉温检测与炉温调控之间的时间同步关系,容易造成整个加热炉炉温调控系统的温度非线性波动、间歇性振荡,引起炉温调控器的参数变化。
因此提高电加热炉的温度控制水平,是当今工业控制技术的主要研究方向之一。
常规控制方法难以实现较高的控制精度和响应速度。
相比之下,经典的增量PID控制算法,无需针对控制对象建立数学模型,便可实现较发复杂系统的精确控制。
本文基于PID算法,提出设计了一套电加炉控制方法,核心控制芯片采用AT89C51系列单片机,具备数据采集、调控、显示、报警等多项功能,实现了对温控系统的设计和模拟仿真,能有效改善电加热炉温度控制系统的性能。
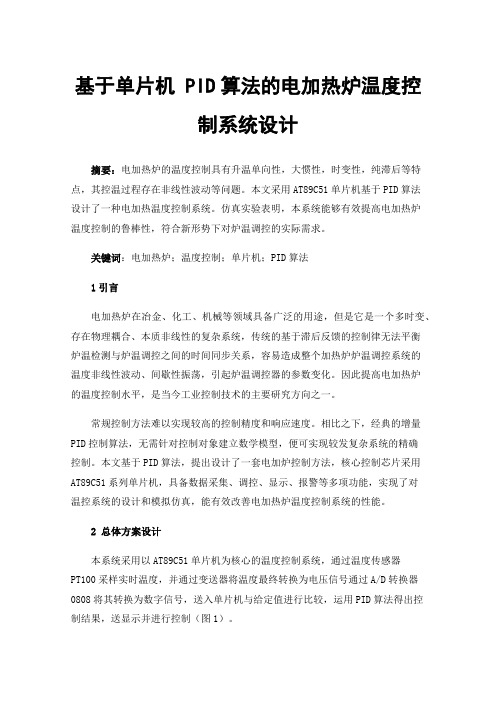
2总体方案设计本系统采用以AT89C51单片机为核心的温度控制系统,通过温度传感器PT100采样实时温度,并通过变送器将温度最终转换为电压信号通过A/D转换器0808将其转换为数字信号,送入单片机与给定值进行比较,运用PID算法得出控制结果,送显示并进行控制(图1)。
图1 系统总体设计方案图2.1系统硬件选择单片机是指将微处理器、存储器和输入/输出接口电路集成在一块集成电路芯版上的单片微型计算机。
单片机主要应用于工业控制领域,用来实现对信号的检测、数据的采集以及对应用对象的控制。
它具有体积小、重量轻、价格低、可靠性高、耗电少和灵活机动等许多优点。
单片机是微型计算机的一个重要分支,特别适合用于智能控制系统。
基于单片机的电加热炉温度控制系统的设计【开题报告】

开题报告电气工程及其自动化基于单片机的电加热炉温度控制系统的设计一、课题研究意义及现状在冶金、化工、建材、机械、食品、石油等各类工业中,广泛使用着加热炉、热处理炉、反应炉等,炉子温度控制是工业对象中一个主要的被控参数。
过去曾使用常规PID控制或继电-接触器控制,自动化程度低,动态控制精度差,满足不了日益发展的工艺技术要求。
由于电热锅炉控制存在较大难度,经研究和实验提出了电加热锅炉的循环投切和分段模糊控制的控制模式,较好地解决了电加热锅炉控制的理论和实际问题。
国内电加热炉控制有四个发展阶段:第一阶段:手动控制、温度仪表显示第二阶段:顺序控制器或PLC程控器,温度仪表参与控制第三阶段:全PLC控制第四阶段:专用电脑控制用电加热锅炉专用电脑取代通用的PLC,更取代温控表。
它具有全PLC控制的全部优点,并克服了全PLC控制的全部缺点,可产品化,成本低,易与各种电热锅炉配套,配备最先进和成熟的控制程序,现场参数可由一般操作人员在现场进行设置和解决。
因此电加热锅炉专用电脑控制器已被广泛采用。
电功率输出的元件分为有机械触点和无机械触点两大类。
前者是交流接触器,后者是可控硅,交流接触器只能用作有级功率调节,优点是主回路完全电气隔离,耐过流和过压能力较强、自身耗电小、发热量也小、价格较低,缺点是有机械动作噪声,触点寿命较短。
可控硅可以用作无级功率调节,也可用于有级功率调节,优点是无机械动作噪声,触点寿命较长,缺点是主回路不能完全关断,过电流和过电压能力差,自身耗电较大,需要强制散热,价格较高。
本系统使用可控硅为输出的元件。
二、课题研究的主要内容和预期目标采用自动控制原理和单片机技术,对PID算法和单片机控制功能进行研究和设计,由可控硅元件来实现温度控制电路。
了解当前国内外电加热炉的研究与其产品市场;熟悉单片机技术,PID算法,可控硅元件等,为将来从事电子产品控制研发、制造及经营等方面工作打下基础。
毕业设计的具体内容:(1)研究和设计使用MCS-51单片机控制功能。
毕业设计----单片机的电加热炉温度控制系统设计[管理资料]
![毕业设计----单片机的电加热炉温度控制系统设计[管理资料]](https://img.taocdn.com/s3/m/db54a234bb4cf7ec4bfed052.png)
毕业论文设计题目:单片机的电加热炉温度控制系统设计摘要随着计算机技术、控制理论和控制技术的发展,电加热炉的温度控制技术日趋成熟,已经成为工业生产中的一个重要部分。
本设计为基于单片机的电加热炉温度控制系统,通过控制电阻丝两端电压的工作时间,来控制电阻丝的输出平均功率,从而实现对电加热炉温度的自动控制。
系统分为温度测量、A/D转换、单片机系统、键盘操作系统、温度显示电路、报警电路、D/A转换等若干个功能模块。
该系统具有硬件成本低,控温精度较高,可靠性好,抗干扰能力强等特点。
关键词:电加热炉;单片机;温度控制;固态继电器目录摘要 (I)目录 (II)第1章控制系统设计 (1)系统基本结构 (1)预期达到的性能指标 (1)温度检测电路及元器件选择 (2)放大器AD522 (2)桥式测量电路设计 (3)单片机最小系统外围电路 (3)单片机8051 (3)电源电路设计 (4)看门狗电路设计 (5)系统时钟电路设计 (6)数据采集电路的设计 (7)模数转换器AD574 (7)多路转换开关CD4051 (8)键盘显示接口技术及报警电路 (10)8279的组成及工作原理 (10)管脚功能说明 (12)8279与键盘显示器的连接 (13)LED报警电路的设计 (14)温度控制电路设计 (15)温度控制系统总电路图 (15)第2章温控系统的软件设计 (16)主程序流程图 (17)键盘扫描和译码过程的流程图 (17)通道数据采集的流程图 (18)单片机主程序流程图 (19)结论 (21)参考文献 (22)致谢 (23)第1章控制系统设计系统基本结构,系统由8051单片机、温度检测电路、模数转换电路、温度控制电路、8279键盘显示器等组成。
炉内温度由热电阻测温元件和电阻元件构成的桥式电路测量并转换成电压信号送给放大器的输入端,使信号变成0-5V电压信号,再经多路转换开关CD4051将信号送入A/D转换器,将此数字量经过数字滤波,标度转换后,一方面通过LED将炉温显示出来;另一方面,将该温度值与被测温度值比较,根据其偏差值的大小,采用比例微分控制(PID控制),通过固态继电器控温电路控制电炉丝的加热功率大小,从而控制电炉的温度,使其逐渐趋于给定值且达到平衡。
基于单片机的电炉炉温控制器设计(毕业设计开题报告)

单片机温度控制系统是以MS-5l单片机为控制核心,辅以采样反馈电路,驱动电路,晶闸管主电路对电炉炉温进行控制的微机控制系统。其系统结构框图可表示为:系统采用单闭环形式,其基本控制原理为:将温度设定值(即输入控制量)和温度反馈值同时送入控制电路部分,然后经过调节器运算得到输出控制量,输出控制量控制驱动电路得到控制电压施加到被控对象上,电炉因此达到一定的温度。传统的炉温控制设备是依靠人工通过对照炉温指示仪表所示值与期望值,手动调节燃料的进料阀门以达到控制炉温的目的。对于对炉温要求精度较高的工厂,传统设备很难达到要求.因此,为实现炉温调控趋向智能化,本设计以单片机技术为核心,采用新型思路,控制电路以8031为核心,采用热电偶传感器将炉温转化成模拟电量,采用温度变送器、采样保持器、A/D转换器将模拟量装换成数字量输入到单片机,利用键盘实现设温,LED显示器显示炉温,当温度超过系统的危险温度时由声光报警器发出警报。
基于单片机的电炉炉温控制器设计(毕业设计开题报告)
设计题目
基于单片机的电炉炉温控制器设计
学生姓名
:
基于单片机的燃料炉炉温控制系统设计课题,结合生产实际,利用所学专业基础课的理论知识,使理论知识系统化、实用化,同时为工厂提供能源利用率高,自动化程度好设备提供可能能基本掌握炉温控制设备的设计能力和制图能力;综合利用文献发现问题的能力。电力资源的匮乏是制约我国经济快速健康发展的一个突出问题,电加热炉是工业生产中一种重要的必不可少的设备,由于技术落后,在利用电加热炉时,不仅不能精确地满足加热工艺曲线的要求,而且对电力资源造成了巨大的浪费。原因主要由以下两点:一基于PLC或计算机控制的电加热系统造价昂贵,很多小型企业不愿接受。二现行的炉温自动控制系统往往具有算法复杂,要求操作人员具有一定的自动控制技术。所以,要想改善这种状况,必须要设计一种操作简单,控制精确,造价便宜的炉温自动控制系统。
基于单片机的电热炉温度自动控制系统

基于单片机的电热炉温度自动控制系统发布时间:2022-07-24T09:12:18.535Z 来源:《工程管理前沿》2022年第3月5期作者:史丽珺[导读] 本文介绍了一种AT89C51的单片机和DS18B20的基础上来作为温度传感器的数字温度检测仪史丽珺泉州信息工程学院 362000摘要:本文介绍了一种AT89C51的单片机和DS18B20的基础上来作为温度传感器的数字温度检测仪,借助1602版本的输出装置来将检测的温度显示。
此次设计的电热炉温度控制系统具有很多的功能,例如,方便读取数据、温度测量的范围广泛、用数字的方式进行显示且在实际应用中的区域也大等特点。
对它可以进行手动操作,来对上下温度警报器的值进行设置一个界限,在测量的温度不在设定的范围中,就会触发蜂鸣器报警。
此次课题所研究的数字温度测控仪是采用的DS18B20数字传感器,和单片机一起来完成温度的检测,带有的功能可以实现简单的操作、占用面积不大等,可以使用一条总线来和两个以上的功能元件进行连接,来设计出一个节省电压、能源的数字检测系统,提供非常大的便利,即使在不好的环境下也可以对当前环境的温度检测,在未来的市场中一定会广泛使用。
关键词:单片机;数字控制;温度控制;DS18B20随着电子技术的发展,特别是随着大规模集成电路的产生,给人们的生活带来了根本性的变化,如果说微型计算机的出现使现代的科学研究得到了质的飞跃,那么可编程控制器的出现则是给现代工业控制测控领域带来了一次新的革命。
在现代社会中,水位和温度控制不仅应用在工厂生产方面,其作用也体现到了各个方面。
众所周知,电热锅炉的应用范围是十分广泛的,其性能的好坏可以直接看出产品的质量,这种将机电结合在一起的产品能够把电能转化为热能,而且有很高的效率、体积小、不会污染环境和空气、运行稳定、还可以提供稳定的热能,能够自动化操作。
由于社会不断地发展,不同领域针对温度控制系统的精准度、稳定性提出了更高的要求。
基于单片机的炉温控制

北京信息科技大学自动化学院基于单片机的电热炉温度控制系统专业: 自动化班级: 自控1102 学号: 2011011024 2011010794 姓名: 王广富吴启婷摘要在生活中,从小型的空调,冰箱,到大型的工厂设备,人们对温度的控制越来越频繁,也越来越精确。
电热炉温度控制系统以C51单片机为基础,利用ADC0808对传感器进行采样,通过与设定值进行比较,对输出加以控制。
从而使得系统能够稳定在设定的范围内。
1.1硬件系统框图以下是硬件系统框图1.2各部分硬件的设计(1)采样电路设计因为ADC0809无法在protues中仿真,所以我选用的器件是ADC0808,功能和ADC0809一样。
但在管脚上有一点区别。
out8为最低位out1为最高位。
而ADC0809则不同。
在这里我用了一个OVEN器件,这个器件两端通电便会自动加热,在T输出端会输出温度相对应的电压,而且其对应的电压值就等于温度值。
因为温度的变化范围是0到100,而ADC0808的基准电压是5V,所以我用了两个电阻进行分压。
是采样信号在0—5V的范围内。
ADDA ADDB ADDC三个端口接地,选通IN0口。
(2)按键输入在这个实验中,我只用了一个按键,对设定温度进行设定,因为按键数目不多,所以系统直接采用非编码方式,直接连接单片机I/O口。
(3)显示部分系统采用LED七段数码动态显示电路来显示温度值,显示范围在0-99之间,该电路由显示、片选、译码三部分组成。
显示部分:由两个两位的LED七段共阴数码管构成,P1口接两个数码管的abcdefg和dp端,P3.4,P3.5是设定值的位选,P3.6,P3.7是当前温度的位选。
(4)输出控制控制部分采用了一个继电器,当P3.0口高电平时,继电器闭合,电热炉进行加热,当P3.0为低电平时,继电器断开,电热炉停止加热。
(5)系统硬件总设计图1.3.1 系统程序总流程图1.3.2 AD转换程序设计int AD() //AD转换{unsigned char Val_AD=0; //用于储存AD值START=0;_nop_();_nop_();_nop_();START=1;_nop_();_nop_();_nop_();START=0; //给START一个脉冲,启动AD转换while(EOC==0); //等待AD转换结束OE=1; //准备读取AD数据Val_AD=P0; //读取P0口的值,即为AD值Val_AD=Val_AD*0.3906;return (Val_AD);}(1) 进行A/D转换之前,要启动转换的方法:ABC=000选择第一通道。
基于单片机的电加热炉温度控制系统设计

基于单片机的电加热炉温度控制系统设计
电加热炉随着科学技术的进展和工业生产水平的提高,已经在冶金、化工、机械等各类工业控制中得到了广泛应用,并且在国民经济中占有举足轻重的地位。
对于这样一个具有非线性、大滞后、大惯性、时变性、升温单向性等特点的控制对象,很难用数学办法建立精确的数学模型,因此用传统的控制理论和办法很难达到好的控制效果。
以其高牢靠性、高性能价格比、控制便利容易和灵便性大等优点,在工业控制系统、智能化仪器仪表等诸多领域得到广泛应用。
采纳单片机举行炉温控制,可以提高控制质量和水平。
2 单片机炉温控制系统结构
本系统的单片机炉温控制系统结构主要由单片机控制器、输出部分、热电偶、温度变送器以及被控对象组成。
1所示。
炉温信号T通过温度检测及变送,变成电信号,与温度设定值举行比较,计算温度偏差e和温度的变幻率de/dt,再由智能控制算法举行推理,并得控制量u,可控硅输出部分按照调整电加热炉的输出功率,即转变可控硅管的接通时光,使电加热炉输出温度达到
抱负的设定值。
3 系统硬件设计
3.1 系统硬件结构
以AT89C为该控制系统的核心,实现对温度的采集、检测和控制。
该系统的工作流程2所示。
系统由变送器经A/D转换器构成输入通道,用于采集炉内的温度信号。
变送器可以选用DBW,型号,它将热电偶信号(温度信号)变为0~5 V 信号,以供A/D转换用。
转换后的数字量与炉温数字化后的给定值举行比较,即可得到实际炉温柔给定炉温的偏差及温度的变幻率。
炉温的设定值由BCD 拨码盘输入。
由AT89C51构成的核心控制器按智能控
第1页共4页。
基于单片机的加热炉炉温控制系统设计
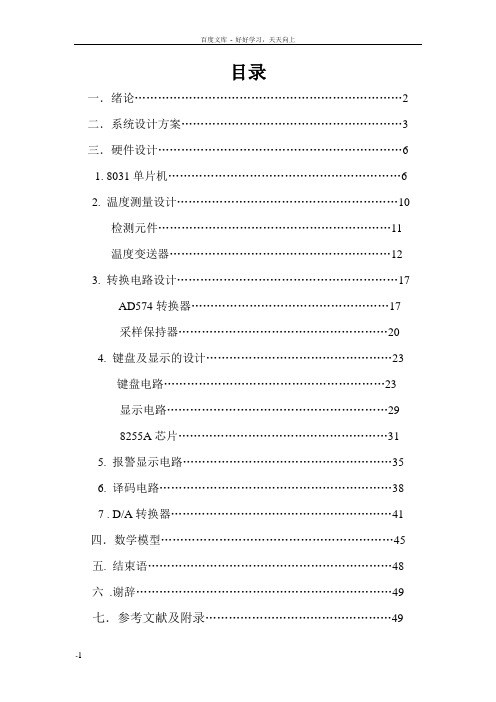
目录一.绪论 (2)二.系统设计方案 (3)三.硬件设计 (6)1. 8031单片机 (6)2. 温度测量设计 (10)检测元件 (11)温度变送器 (12)3. 转换电路设计 (17)AD574转换器 (17)采样保持器 (20)4. 键盘及显示的设计 (23)键盘电路 (23)显示电路 (29)8255A芯片 (31)5. 报警显示电路 (35)6. 译码电路 (38)7 . D/A转换器 (41)四.数学模型 (45)五. 结束语 (48)六.谢辞 (49)七.参考文献及附录 (49)基于单片机的加热炉炉温控制系统设计(侧重硬件设计)一.绪言温度是工业对象中最主要的被控参数之一,特别是在冶金,化工,机械各类工业中,广泛使用各种加热炉,热处理炉,反应炉等。
由于炉子的种类不同,因此所采用的加热方法及燃料也不同,如煤气,天然气,油,电,等等。
但是就其控制系统的本身的动态特性来说,基本上都属于一阶纯滞后环节,因而在控制算法上基本相同。
随着电子技术和微型计算机的迅速发展,特别是单片机的发展,微机测量和控制技术得到了迅速的发展和广泛的应用。
单片机具有处理能力强,运行速度快,功耗低等优点,应用在温度测量和控制方面,控制简单方便,测量范围广,精度较高。
实践证明,控制方法的优劣,运行效果的好坏,直接影响到产品的质量,能源的消耗,设备的生产效率。
而用微型计算机对炉窑进行控制,无论在提高产品质量和数量,节约能源,还是在改善劳动条件等方面都显示出无比的优越性。
特别是单片机对被控对象采样功能强,体积小,价格低的智能温度控制装置进行控制已成为现实。
本文将设计一种基于8031单片机的加热炉炉温控制的控制系统。
本文选择的控制对象是用天然气加热的退火炉,天然气烧嘴为自带空气式。
退火炉主要用于钢材的热处理,以改变钢材的物理性能。
被测参数主要是温度,测量范围为0~1000℃。
针对加热炉的上述特点,采用8031单片机作为主机,对其进行智能控制的控温系统。
基于80C51的电炉温度控制系统设计
基于80C51的电炉温度控制系统设计一.绪论电炉在化工、冶金等行业应用广泛,因此温度控制在工业生产和科学研究中具有重要意义。
采用单片机进行炉温控制,具有电路设计简单、精度高、控制效果好等优点,对提高生产效率、促进科技进步等方面具有重要的现实意义。
本设计利用单片机的I/O接口,以查询、中断的方式实现温度的实时采集与控制,充分利用CPU的资源空间,简化了测量电路以及程序调试的复杂过程,方便了技术人员在实际中的开发和应用。
二.系统工作原理本系统由单片机80C51、温度采集电路、温度设定键、2位LED 温度显示电路、主电路及其驱动电路等部分组成,采用bang-bang控制策略进行温度控制。
由于系统中采用了新型元件,因此具有功能强、精度高、功耗低、硬件电路简单等特点。
其硬件原理图如图1所示:书上在系统中,利用热敏电阻测得电炉实际温度并转换成电阻值,然后经过温度采集电路转化为电压信号。
该电压信号经过ADC0809转换成与炉温相对应的数字信号进入单片机,单片机进行数据处理后,通过液晶显示器显示温度,同时将温度与设定温度比较,根据设定计算出控制量,根据控制量通过控制继电器的导通和关闭从而控制电阻丝的导通时间,以实现对炉温的控制。
三.系统硬件电路设计(1)80C51单片机80C51引脚封装图如下:后页80C51单片机具有高密度、高速度、低功耗的特点,电平既与TTL电平兼容又与CMOS电平兼容。
基本组成:8位CPU,含布尔处理器时钟电路、总线控制4k字节的程序存储器128字节的数据存储器特殊功能寄存器SFR4个并行I/O口2个16位定时/计数器1个双全工异步串行口中断系统(5个中断源、2个优先级)(2)主电路及其驱动电路电路图如下:后页MOC3061为光电双向可控硅驱动器,由美国摩托罗拉公司推出,该器件大大加强了静态能力保证了电感负载的稳定的开关性能,由于输入输出采用光电隔离,绝缘电压高达7500v表一moc3061极限参数参数数值单位红外发光二极管反向电压 6 V正向连续电流60 mA总功耗120 mW输出驱动截止状态端电压600 V峰值重复浪涌电流 1 A总功耗150 mW整个器件绝缘电压7500 V总功耗250 mW结温范围-40—+100工作环境温度范围-40—+85贮存温度-40—+150焊接温度260MOC3061的端口1与单片机P2.0口连接,以实现电炉的加热或保温(3)温度采集电路:电路图如下:最后页恒流源LM317,热敏电阻PT100,运算放大器 ADC0809ADC0809数模转换器结构图:书上ADC0809具有三态锁存器,数据总线直接与单片机数据总线连接。
基于89C51单片机的电阻加热炉温度控制系统设计

基于89C51单片机的电阻加热炉温度控制系统设计电阻加热炉是一种常见的加热设备,广泛应用于工业生产中的温度控制领域。
为了更好地控制电阻加热炉的温度,提高工业生产效率和产品质量,设计一个基于89C51单片机的温度控制系统具有重要的意义。
随着科技的不断发展和进步,单片机技术在控制系统中得到了广泛的应用。
89C51单片机是一种常见的单片机,具有稳定性高、成本低等优点,适合用于温度控制系统的设计。
本文将基于89C51单片机,设计一个电阻加热炉温度控制系统,探讨系统的原理、设计方法和实现过程,为工业生产提供一种高效可靠的温度控制方案。
首先,本文将对电阻加热炉的工作原理进行简要介绍。
电阻加热炉是利用电阻发热的原理来提高物体的温度的一种加热设备,具有快速升温、温度均匀等优点,广泛应用于金属加热、玻璃淬火等工业生产领域。
然后,本文将阐述温度控制系统的设计思路和需求分析。
在工业生产中,对电阻加热炉的温度要求非常严格,需要一个能够实时监测和调节温度的控制系统来确保产品质量和生产效率。
接着,本文将详细介绍基于89C51单片机的电阻加热炉温度控制系统的设计方案。
设计过程中,将充分考虑系统的稳定性、精确性和实用性,利用89C51单片机的强大功能和灵活性,实现对电阻加热炉温度的准确控制。
同时,本文将分析控制系统的硬件电路设计和软件程序编写过程,确保系统的可靠性和稳定性。
最后,本文将对设计的温度控制系统进行实际测试和性能评估。
通过实验数据的采集和分析,验证系统的温度控制能力和响应速度,评估系统在实际工业生产中的应用效果。
同时,本文将探讨系统存在的问题和改进方向,为日后的研究提供参考和借鉴。
梳理一下本文的重点,我们可以发现,是一个具有实际意义和研究价值的课题。
通过本文的研究,不仅可以提高电阻加热炉的温度控制精度和稳定性,还可以为工业生产提供一个高效可靠的温度控制方案,推动工业生产的数字化转型和智能化发展。
希望本文的研究成果能够为相关领域的科研工作者和工程技术人员提供一定的参考和借鉴,共同推动温度控制技术的发展和应用。
基于单片机的电加热炉温度控制系统的设计
基于单片机的电加热炉温度控制系统的设计周晓飞,于平中国矿业大学信息与电气工程学院,江苏徐州(221008)E-mail:xf163z@163.om摘要:热处理是提高金属材料及其制品质量的重要手段。
近年来随着工业的发展,对金属材料的性能提出了更多更高的要求,因而热处理技术也向着优质、高效、节能、无公害方向发展。
电加热炉是热处理生产中应用最广的加热设备。
本文以AT89C52单片机为核心,采用功率控制电路,避开控制过程中的不确定性、不精确性、噪音以及非线性、时变形和时滞性等影响,实现了炉温的精确控制。
关键词:电加热炉;热电偶;控温;人机界面中图分类号:TM924.11.引言本系统是为热处理用电加热炉设计的一套的控制系统,利用单片机、温度传感器、加热丝和A/D转换芯片来实现的控制系统,其中主要的特点就是升温均匀、精确,升温曲线具有线性等。
本系统与传统的控温方法相比更具有精度高、功能多、造价低、结构简单和使用方便等优点。
其人机界面友好,操作简单,使用方便,具有较高的性能价格比。
为了降低成本和保证较高的控温精度,采用普通的ADC0809芯片和具有零点迁移、冷端补偿功能的温度变送器桥路,使实际测温范围缩小。
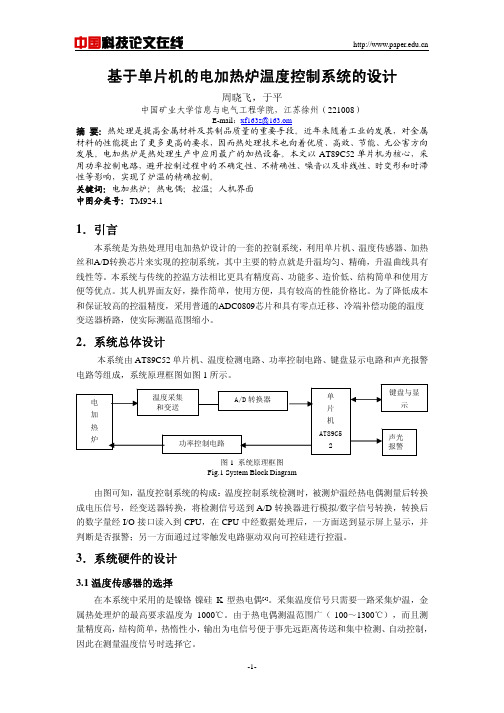
2.系统总体设计本系统由AT89C52单片机、温度检测电路、功率控制电路、键盘显示电路和声光报警电路等组成,系统原理框图如图1所示。
图1 系统原理框图Fig.1 System Block Diagram由图可知,温度控制系统的构成:温度控制系统检测时,被测炉温经热电偶测量后转换成电压信号,经变送器转换,将检测信号送到A/D转换器进行模拟/数字信号转换,转换后的数字量经I/O接口读入到CPU,在CPU中经数据处理后,一方面送到显示屏上显示,并判断是否报警;另一方面通过过零触发电路驱动双向可控硅进行控温。
3.系统硬件的设计3.1温度传感器的选择在本系统中采用的是镍铬-镍硅K型热电偶[1]。
采集温度信号只需要一路采集炉温,金属热处理炉的最高要求温度为1000℃。
基于单片机控制的电热炉温控系统

总643期第六期2018年6月河南科技Henan Science and Technology 基于单片机控制的电热炉温控系统张少杰(广东新功电器有限公司,广东饶平515700)摘要:本文主要利用基于单片机的电热炉温控系统,对其总电路和触发线路进行重新架构,该系统主要包括REGHC51单片机、热敏电阻、温度检测仪、电路转换器、双向晶闸管触发及开关电路。
与传统电热炉温控系统相比,具有操作方便、耐久度高、更易检修、可靠性高和数据误差小等优势。
关键词:单片机;电热炉;温控系统中图分类号:TP273文献标识码:A 文章编号:1003-5168(2018)17-0073-02Temperature Control System of Electric Heating Furnace based onSingle Chip Microcomputer ControlZHANG Shaojie (Guangdong Xingong Electrical Appliance Co.,Ltd.,Raoping Guangdong 515700)Abstract:This paper mainly used the temperature control system of electric heating furnace based on single chip mi⁃crocomputer,and restructured its total circuit and trigger circuit.The system mainly included REGHC51single chip,thermistor,temperature detector,circuit converter,bidirectional thyristor trigger and switch pared with the traditional electric stove temperature control system,the system has the advantages of convenient operation,high durability,easier maintenance,high reliability and small data error.Keywords:single chip microcomputer ;electric heating furnace ;temperature control system1整体电路的系统架构整体电路系统架构由REGHC51单片机温度控制系统、温度控制器、温度传感器、电路转换器、温度显示器、声光变阻器和晶闸管电路启停装置组成。
基于单片机的对加热炉温度控制系统设计

MCS-51单片机有4个I/O端口,共32根I/O线,4个端口都是准双向口。每个口都包含一个锁存器,即专用寄存器P0-P3,一个输出驱动器和输入缓冲器。为方便起见,我们把4个端口和其中的锁存器都统称P0-P3。
在访问片外扩展存储器时,低8位地址和数据由P0口分时传送,高8位地址由P2口传送。在无片外扩展存储器的系统中,这4个口的每一位均可作为双向的I/O口使用。
This design uses non-ROM 8031 totakethe master control chip. 8031 connection electric circuits have 8155、2764.8155 uses in the keyboard /LEDmonitorconnection, 2764 may take 8031 exterior ROMmemories,onetemperature-control circuit is adjusts the merit realizationthrough the silicon-controlled rectifier. The bidirectional silicon-controlled rectifier tube and the heater series connection in exchange 220V,50HZ exchange city electricity return route, in assigns in the cycle, 8031 so long as the change silicon-controlled rectifier tube puts through the time then to be possible to change the heater power, achieves the attemperation the goal.
基于80C52单片机的电加热数字恒温控制系统设计
1 控制方案设计温度场是一个梯度场,温度的上升或下降随时间缓慢变化。
电加热炉温度控制过程可以用自然降温、程序升温和恒温保持3个分过程来描述。
自然降温:停止加热,环境温度在整个过程中保持不变,受控温度场最终稳定为环境温度。
程序升温过程:给定电压值为一变化值,由程序控制逐渐变化,最终使炉温的稳定在给定值上。
恒温保持:给定炉温为一定值,使炉温稳定在给定值上,这时受控场温度恰好抵消散热因素的影响而能够维持在所设定的温度。
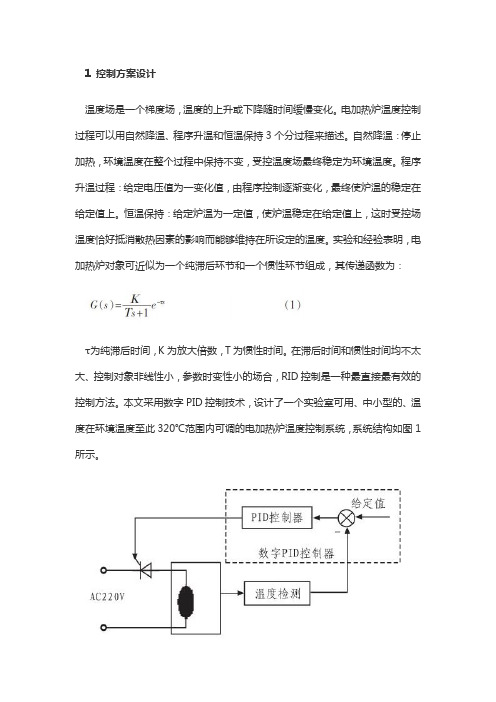
实验和经验表明,电加热炉对象可近似为一个纯滞后环节和一个惯性环节组成,其传递函数为:τ为纯滞后时间,K为放大倍数,T为惯性时间。
在滞后时间和惯性时间均不太大、控制对象非线性小,参数时变性小的场合,RID控制是一种最直接最有效的控制方法。
本文采用数字PID控制技术,设计了一个实验室可用、中小型的、温度在环境温度至此320℃范围内可调的电加热炉温度控制系统,系统结构如图1所示。
图1 炉温度控制系统结构系统采用温度传感器对炉膛内的实时温度进行检测、转换、采样,所得的检测信号经A/D转换器转换成数字信号进入单片机,并与单片机内预先设定的温度给定值加于比较得出偏差,偏差送入控制器,单片机执行偏差的PID数字运算得到可控硅的触发脉冲,并由这个触发脉冲调节可控硅的导通时间,从而调节电炉丝与风扇的两端电压形成控制作用,使炉温保持恒定。
2 软、硬件设计2.1 硬件系统设计控制器的核心是80C52单片机,其硬件框图如图2所示。
系统采用AD590温度传感器电路把温度转换成0~5V的电压信号,再由转换器A/D 8080转换成数字信号送入单片机80C52.单片机根据系统的给定温度和实际测量值比较得出偏差,再利用PID算法求出控制量U(kT)。
通过U(kT)来决定输出触发脉冲的宽度。
从而控制可控硅的导通时间,最终达到控制温度的目的。
图2 系统硬件框图微机系统主要由CPU80C52,并行接口8255A,地址锁存器74LS373构成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的电加热炉温度控制系统设计
2010-07-28 12:56:38 作者:王丽华郑树展来源:高等职业教育:天津职业大学学报
关键字:电加热炉控温固态继电器飞升曲线
引言
电加热炉随着科学技术的发展和工业生产水平的提高,已经在冶金、化工、机械等各类工业控制中得到了广泛应用,并且在国民经济中占有举足轻重的地位。
对于这样一个具有非线性、大滞后、大惯性、时变性、升温单向性等特点的控制对象,很难用数学方法建立精确的数学模型,因此用传统的控制理论和方法很难达到好的控制效果。
单片机以其高可靠性、高性能价格比、控制方便简单和灵活性大等优点,在工业控制系统、智能化仪器仪表等诸多领域得到广泛应用。
采用单片机进行炉温控制,可以提高控制质量和自动化水平。
1 单片机炉温控制系统结构
本系统的单片机炉温控制系统结构主要由单片机控制器、可控硅输出部分、热电偶传感器、温度变送器以及被控对象组成。
如图1所示。
炉温信号T通过温度检测及变送,变成电信号,与温度设定值进行比较,计算温度偏差e和温度的变化率de/dt,再由智能控制算法进行推理,并得控制量u,可控硅输出部分根据调节电加热炉的输出功率,即改变可控硅管的接通时间,使电加热炉输出温度达到
理想的设定值。
2 系统硬件设计
2.1 系统硬件结构
以AT89C51单片机为该控制系统的核心,实现对温度的采集、检测和控制。
该系统的工作流程如图2所示。
系统由变送器经A/D转换器构成输入通道,用于采集炉内的温度信号。
变送器可以选用DBW,型号,它将热电偶信号(温度信号)变为0~5 V电压信号,以供A/D转换用。
转换后的数字量与炉温数字化后的给定值进行比较,即可得到实际炉温和给定炉温的偏差及温度的变化率。
炉温的设定值由BCD 拨码盘输入。
由AT89C51构成的核心控制器按智能控制算法进行推算,得出所需要的控制量。
由单片机的输出通过调节可控硅管的接通时间,改变电炉的输出功率,起到调温的作用。
2.2 系统硬件的选择
a)微型计算机的选择:选择AT89C51单片机构成炉温控制系统。
它具有8位CPU,3 2根I/O线,4 kB片内ROM存储器,128 kB的RAM存储器。
AT89C51对温度是通过可控硅调功器实现的。
在系统开发过程中修改程序容易,可以大大缩短开发周期。
同时,系统工作过程中能有效地保存一些数据信息,不受系统掉电或断电等突发情况的影响。
AT89C51单片机内部有128 B的RAM存储器,不够本系统使用,因此,采用6264(8 kB)的RAM作为外部数据存储器。
b)热电偶的选择:本设计采用DBW型热电偶--镍络-镍硅(线性度较好,热电势较大,灵敏度较高,稳定性和复现性较好,抗氧化性强,价格便宜)对温度进行检测。
由于温度是非线性输出的,而与输入的mV信号成线性关系,所以在软件上将此非线性关系加以修正,以便正确反映输入mV信号与温度之间的关系。
ADC0809把检测到的连续变化的温度模拟量转换成离散的数字量,输人到单片机中进行处理。
c)键盘输入的选择:采用4片BCD拨码盘作为温度设定的输入单元,输入范围为0~9999,可满足本系统的要求。
每位BCD码盘占4条线,通过上拉电阻接入8255可编程并行I/O扩展口。
4片BCD码盘占8255的A、B两口,8255工作方式设为"0 模式",A、B 两口均为输入方式。
开机后,CPU读8255口操作,即可将BCD码盘的设定温度读入并存人相应的存储单元。
d) 显示器的选择:采用字符型LCD(液晶显示器)模块TC1602A,并且它把LCD控制器、ROM和LCD显示器用PCB(印制板)连接到一起,只要向LCD送人相应的命令和数据便可实现所需要的显示,使用特别方便灵活。
第1行显示设定温度,第2行显示实际温度,这样,温差一目了然,方便控制。
3 系统软件设计
本系统的应用程序主要由主程序、中断服务程序和子程序组成。
主程序的任务是对系统进行初始化,实现参数输入,并控制电加热炉的正常运行。
主程序主要由系统初始化、数据采集及处理、智能推理等部分组成。
系统初始化包括设置栈底、工作寄存器组、控制量的初始值、采样周期、中断方式和状态、定时器的工作方式以及8255的初始化、TC1602A的初始化等。
数据采集及处理主要包括实时采集电加热炉的炉温信号,计算出实际炉温与理想值的差值以及温差的变化率,并对炉温信号进行滤波和限幅处理。
主程序如图3所示。
中断服务程序实现定时采样和输出控制。
AT89C51共有6个中断源:2个外部中断、2个定时器溢出中断及2个串行中断。
子程序主要有采样子程序、数字滤波子程序、控制算法子程序、数字转换子程序、显示子程序等。
在采样程序中包括对A/D启动、读结果及把A/D结果转换成为实际温度值。
由于热电偶本身的非线性及模拟输人通道存在的非线性,需要将A/D值与温度值之间对应关系以表格形式存于EPROM中。
数字滤波子程序是将A/D转换成的数字量提取有用的量,一方面通过TC1602ALCD模块显示出来;另一方面将该温度值与被控温度值进行比较,根据其偏差值的大小及温度的变化率,通过智能控制器来改变可控硅管的接通时间,从而达到改变电加热炉的输出功率,即控制算法子程序是控制器中最重要的一部分,它的原理将在第4节介绍。
4 智能控制算法
考虑到电加热炉是一个非线性、时变和分布参数系统,所以本文采用一种新型的智能控制算法。
它充分吸取数学和自动控制理论成果,与定性知识相结合,做到取长补短,在实时控制中取得较好的成果。
本系统的智能控制器由数据库、知识库、推理机、学习环节、修正环节和黑板组成。
数据库中存放各个时刻的采样值y(k)、偏差e(k)、控制量u(k)和生成控制量u(k),所用的控制规则序号、每条控制规则的加权系数a都是以数组的形式存放。
知识库中知识由产生式规则生成,其规则集都是按顺序排列的。
当求得偏差e(k)和被调整量y(k)后,借助黑板进行正向推理,从上到下顺序地搜索知识库中的匹配模式,一旦找到匹配规则,即可求出控制量u(k)。
学习过程是通过修正规则加权系数a,使各种控制规则产生的控制量随环境和控制量效果变化进行修正,从而实现自学习的功能。
由于被控制对象具有d步时延,因此,y(k)是由(k-d)时刻及其以前所有控制量作用的结果,则应修正控制量u(k-d)的控制规则所对应的控制规则加权系数a[num(k- d)]。
系统炉温控制过程是一个慢过程,一般采样间隔长,在此间隔时间内,被控对象可能受内部参数变化或随机干扰影响,因而町能导致(k+1)时刻发出的控制量使控制效果变差,影
响系统的控制性能。
为补充这一不足,这里引入动态修正环节为:
式中:0 < r < 1。
最后由修正量和黑板给出的u(k)叠加,得到总输出控制量为:
式中:β取0.8~0.9。
5 结束语
本系统以单片机AT89C51为核心,它具有高可靠性、高性能价格比、控制方便简单和灵活性大等优点。
控制器采用新型的智能控制算法,冈而系统升温快,控温精度高,稳态误差可达±5℃以内,满足系统要求。
整个系统操作简便,抗干扰能力强、运行可靠。