液压挖掘机工作装置在ADAMS中的运动仿真解析
(完整版)Adams运动仿真例子--起重机的建模和仿真
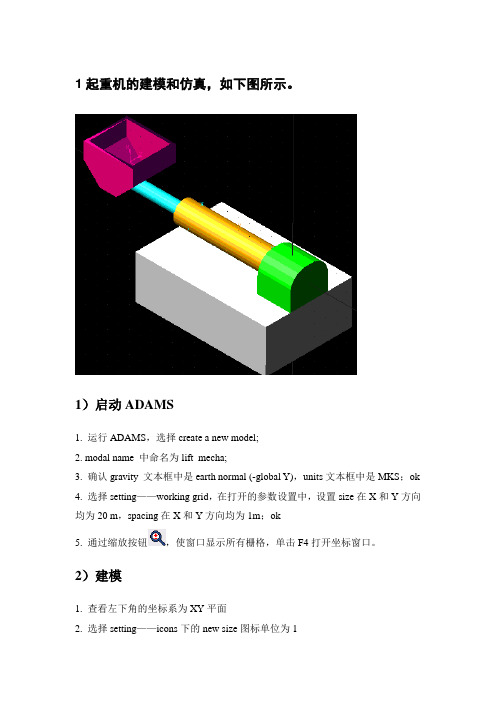
1起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4. 设置实体参数;On groundLength :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数2 bod ——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)测量和后处理①鼠标右键点击铲斗,打开右键快捷键,选择测量measure②系统打开参数设置对话框,将Characteristic设置为CM Point,Component 设置为Y,测量Y向位移。
210979654_基于ADAMS_的履带式挖掘机越障动力学建模与分析
基于ADAMS 的履带式挖掘机越障动力学建模与分析秦仙蓉1 冯亚磊1 沈健花2 张 氢1 孙远韬11同济大学机械与能源工程学院 上海 201804 2惠普信息技术研发有限公司 上海 200131摘 要:履带式挖掘机作业时需跨越各类障碍物,在履带式挖掘机跨越障碍物时会受到来自地面的冲击载荷而产生疲劳破环,故研究履带式挖掘机的整机越障动力学特性十分必要。
基于动力学仿真软件ADAMS,研究了履带式挖掘机的整机越障动力学特性。
以某中型履带式挖掘机为例,在Pro/E 中完成履带式挖掘机的三维建模,在ADAMS 中建立其简化虚拟样机,完成该履带式挖掘机越障的动力学仿真。
结果表明:越障过程中,挖掘机车体垂向最大位移与障碍物设置高度一致,整个越障过程较为平稳。
此外,车体的转动角速度在车体越过障碍边缘到引导轮触地时刻存在较明显的变化过程。
关键词:履带式挖掘机;越障;动力学仿真;虚拟样机中图分类号:U446 文献标识码:A 文章编号:1001-0785(2023)05-0018-05Abstract: In view of the fact that crawler excavators need to cross all kinds of obstacles during operation, and are easily subjected to impact load from the ground, resulting in fatigue damage, it is necessary to study the dynamic characteristics of the whole crawler excavator crossing obstacles. In this study, based on the dynamic simulation software Adams, the dynamic characteristics of the whole crawler excavator are studied. Taking a medium-sized crawler excavator as an example, the three-dimensional modeling of the crawler excavator is completed in ProE, and its simplified virtual prototype is established in Adams, and the dynamic simulation of the crawler excavator crossing obstacles is completed. The results show that the vertical maximum displacement of the excavator body is consistent with the height of the obstacle during the obstacle crossing, and the body is relatively stable during the whole obstacle crossing. In addition, the rotation angular velocity of the excavator changes obviously, which occurs during the period when the excavator travels to the edge of obstacle crossing and the guide wheel touches the ground.Keywords: crawler excavator; obstacle crossing; dynamic simulation; virtual prototype0 引言挖掘机被广泛用在各类土石方开挖工程现场,据不完全统计,土石方施工过程中约60%的土石方开挖都是靠挖掘机来完成的。
基于ADAMS的农用挖掘机工作装置的动力学仿真
基于ADAMS的农用挖掘机工作装置的动力学仿真郑东京;吕新民;秦贞沛;戚烈【摘要】为了进一步提高农用挖掘机性能,降低生产成本,以农用挖掘机工作装置为研究对象,在Pro/Engineer中建立了三维模型,将模型导入到ADAMS中建立了挖掘机工作装置的虚拟样机.对其进行了动力学仿真分析,得到了在动臂受力最大的工况下,挖掘机进行转斗挖掘时动臂上4个铰接点受力的变化规律曲线,分析结果为进行动臂的有限元分析提供了依据.【期刊名称】《农机化研究》【年(卷),期】2011(033)005【总页数】4页(P52-55)【关键词】农用挖掘机;虚拟样机;动力学仿真【作者】郑东京;吕新民;秦贞沛;戚烈【作者单位】西北农林科技大学,机械与电子工程学院,陕西,杨凌,712100;西北农林科技大学,机械与电子工程学院,陕西,杨凌,712100;西北农林科技大学,机械与电子工程学院,陕西,杨凌,712100;西北农林科技大学,机械与电子工程学院,陕西,杨凌,712100【正文语种】中文【中图分类】TP391.910 引言农用挖掘机是一种广泛使用的农田水利建设施工机械,在减轻繁重的体力劳动,保证工程质量,加快建设速度等方面起着十分重要的作用。
工作装置是挖掘机直接承受工作载荷的主要部件,由动臂机构、斗杆机构、铲斗机构3部分组成。
其结构强度直接影响到挖掘机的可靠性和工作性能。
工作装置在作业过程中经常启动、制动、换向,且外负载变化很大,工作条件恶劣,冲击和振动多,因此对工作装置提出了较高的设计要求。
但工作装置作为一个多体系统,按照传统方法进行动力学分析相当繁琐,且很难优化,采用基于ADAMS平台的虚拟样机技术为工作装置的动力学仿真分析提供了一个简洁、高效的解决方案。
本文首先在Pro/E中建立了农用挖掘机工作装置的三维模型,然后将其导入到ADAMS软件中建立工作装置的虚拟样机。
利用STEP函数驱动各油缸运动,模拟工作装置外载荷的加载、卸载过程,进行动力学仿真后,得到了动臂上4个铰接点的受力变化曲线。
基于ADAMS的压力机执行机构运动仿真分析

基于ADAMS的压力机执行机构运动仿真分析1. 研究背景与意义:介绍压力机执行机构的运动仿真分析的重要性和现实意义,阐明ADAMS在这个领域发挥的作用。
2. 压力机执行机构运动仿真分析的数学模型:阐述压力机执行机构的数学模型,包括系统结构、系统的动力学模型、运动学约束等,并给出数学方程式。
3. 压力机执行机构运动仿真的模型建立:使用ADAMS软件建立仿真模型,详细介绍模型的建立过程和模型中的各项参数设置,并分析约束的正确性。
4. 压力机执行机构仿真实验结果分析:通过ADAMS仿真,得到模拟结果,并对模拟结果进行分析,包括执行机构的运动轨迹、速度变化、加速度变化等。
5. 压力机执行机构仿真实验结论:通过对仿真实验结果的分析,得出执行机构的动力学变化规律和各种参数的值,总结执行机构的优缺点,并给出改进方案和建议。
6. 参考文献:列出本篇论文参考文献和引用文献。
第1章:研究背景与意义压力机是一种用于连续压制金属、非金属等工件的机械设备,广泛应用于制造业中。
压力机的执行机构是其运动核心,对于压制工件的效率和质量具有重要影响。
为了提高压力机的加工效率和工件质量,必须对其执行机构的运动进行深入研究与优化。
运动仿真分析是一种快速、高精度的评估方法,可以在不消耗过多的实验时间和成本的情况下,研究执行机构的运动性能和各项参数的变化规律,对执行机构进行优化调整。
ADAMS(Automated Dynamic Analysis of Mechanical System)是一种广泛用于动力学仿真和分析、虚拟样机设计和测试等工程领域的软件工具。
它可以模拟机械系统的运动方式、自由度、滑动、碰撞、弹簧、阻尼作用等,进行动态评估和运动优化,为机械系统的设计与优化提供重要技术支持。
因此,本论文旨在使用ADAMS软件对压力机执行机构的运动进行仿真分析,研究执行机构的运动轨迹、速度和加速度等参数变化规律,为压力机的设计和优化提供参考和指导。
液压挖掘机工作装置的建模与仿真分析
。
纵观我国液压挖掘机 30 余年的发展历史,大致可以分成以下几个阶段: (1)开发阶段(1967 年—1977 年)。以测绘仿制为主的开发,通过多年坚持不懈的努力,克服一个一 个的困难, 有少量几种规格的液压挖掘机终于获得初步成功, 为我国挖掘机行业的形成和发展迈出了重 要的一步。 (2)液压挖掘机发展、提高并全面替代机械挖掘机阶段(1978~1986 年)。这个阶段通过各主机生产厂 引进技术(主要是德国挖掘机制造技术)的消化、吸收和移植,使我国液压挖掘机产品的性能指标全面提 高到国际 70 年代末 80 年代初期的水平。全国液压挖掘机平均年产量达到 1230 台。 (3)液压挖掘机生产企业数量增加,新加入挖掘机行业的国有大、中型企业以技贸结合,合作生产 方式联合引进日本挖掘机制造技术(1987 年~1993 年)。由于国内对挖掘机需求量的不断提高,新加入 挖掘机行业的企业通过开发和引进挖掘机制造技术, 其产品批量或小批量的投放国内市场或出口, 打破 了多年来主要由六大家挖掘机生产企业垄断国内挖掘机市场的局面, 引进了有益于提高产品质量、 性能 和产量的良性竞争。这个期间国内液压挖掘机的年均产量提高到 2000 余台。 (4)国内液压挖掘机供需矛盾日益扩大,广大用户为了提高施工质量和按期完成施工任务,对使用 高质量、高水平、高效率挖掘机的兴趣日趋浓厚。国外各著名挖掘机制造厂商纷纷前来中国创办合资、 独资挖掘机生产企业。从 1994 年开始,特别到 1995 年在我国挖掘机行业掀起了一股不小的合资浪潮. 其中美国卡特彼勒公司率先在徐州金山桥开发区建立了生产液压挖掘机的合资企业, 随后日本小松制作 所、日立建机株式会社、神户制钢所、韩国大宇重工业、现代重工业以及德国利勃海尔公司等都相继在 中国建立了合资、独资挖掘机生产企业,生产具有世界先进水平的多种型号和规格的液压挖掘机[7]。
液压挖掘机工作装置在ADAMS中的运动仿真解析

液压挖掘机工作装置在A D A M S中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。
文章基于动力学仿真软件ADAMS 建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。
液压缸顺序工作的运动仿真分析1.1.基于尺寸确定当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。
简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。
在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。
在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。
例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。
1.2.顺序工作运动仿真实现的路线仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。
可以在液压缸移动副约束处添加移动驱动,改变运动方式,将其更换成位移运动方式。
运动的函数输入时,需要注意相匹配的的STEP函数。
对液压缸进行STEP函数值设置时,应该满足运动函数需求。
当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。
1.3.仿真过程当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。
可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。
这个伸缩过程需要得到弧线支撑,基于保障弧线运动轨迹基础上做好控制工作。
液压挖掘机工作装置的动力学分析及仿真

26
机械传动
2 l2 H + l2 H] - L 3 2 l HlH] [ T] [ [ T2] : Tl] 等效力矩阵为
2005 年
等效有限元方法, 表示单元节点号与系统节点号之间 为 关系的关联阵 [ Nm ]
x3 :
[ F ]:[ Ml F cos "3
0
0
T 0]
M2
0
0
M3
F sin "
8
曲秀全 . 单自由度平面连杆机构等效转动惯量的计算公式 . 哈尔滨 工业大学学报,2004 . 5 610 ~ 612
图4
动臂的仿真曲线
9 车仁炜 . 一种自动仓储货运车工作装置的设计及动力分析 . 大连铁 道学院学报,2004 . 2 . 9 ~ 12 10 王国强, 张进平 . 虚拟样机技术及其在 ADAMS 上的实践 . 西安: 西 北工业大学出版社, 2002 收稿日期: 20041205 资助项目: 黑龙江省自然科学基金资助项目 (F01 - 23) 哈尔滨工业大学跨学科交叉基金资助项目 (HTT. MD 2000 . 17) 作者简介: 车仁炜 (1964 - ) , 女, 黑龙江哈尔滨人, 博士研究生
[6, 7] 本文采用等效元素法 对液压挖掘机工作装置
A l lI ! (! 2 2 (1)
进行动力分析, 并在 ADAMS 上进行动力学仿真, 改动 了模型后可以直接在仿真中把改动体现出来; 调整了 某设计参数或某关节的运动规律后无需改动程序就可 以直接进行运动学与动力学的重新计算。
(2)
1
!.!
动力学建模
等效原则 等效元素法的基本思想是把有限元方法与等效的
式中
— —系统等效质量阵, 它由单元质量阵和表 M— 示系统可能位移与单元节点坐标之间关 系的关联阵 [ Nm ] 所决定。 — —雅可比阵, 它建立了广义坐标和为推导 T— 和建立有限元模型的方便而设定的系统 "Ri 。 运动自由度之间的关系 [ T] = "gS — —广义坐标阵 g—
基于ADAMS折叠式动臂工作装置动态特性仿真分析
作者简介:李兆安,男,硕士,研究方向:工程机械结构优化。
基于ADAMS 折叠式动臂工作装置动态特性仿真分析李兆安(遵义职业技术学院,贵州 遵义 563000)摘 要:为得到更为接近实际工况的仿真分析方法,文章对折叠式动臂挖掘机的工作装置进行动力学建模,在虚拟样机中建立刚性体模型和刚柔耦合模型进行仿真分析。
同时,利用ADAMS 多体动力学分析软件创建刚性体模型和刚柔耦合模型并对其进行动态强度分析,(着重对斗杆柔性体的受力情况进行分析)。
通过对比折叠动臂工作装置刚性体系统与刚柔耦合系统的受力变化曲线,发现刚柔耦合系统较刚性体系统仿真更为接近实际工况。
关键词:折叠动臂;工作装置;动态特性;刚柔耦合中图分类号:TU621 文献标志码:A 文章编号:2096-2789(2020)17-0004-04折叠式动臂挖掘机工作装置采用新型的折叠式动臂结构,由后动臂、前动臂、斗杆和铲斗组合而成。
将原先经典的整体式动臂拆分成由前动臂和后动臂两个结构件铰接而成的结构,前动臂由两个前动臂油缸进行调控,后动臂由后动臂油缸(调整油缸)进行调控。
在以往的轮式折叠动臂液压挖掘机设计中,对折叠动臂工作装置的设计多采用静力学分析计算来确定工作装置的受力情况,依靠安全系数的选取来代替工作装置的动态载荷、冲击与振动分析。
借鉴整体式动臂挖掘机的研究方法对轮式折叠动臂液压挖掘机的工作装置进行前动臂、后动臂、斗杆、铲斗四构件联动的方式来分析其运动特性,在理论建模和仿真分析上都较整体式动臂的三构件联动的分析更为复杂。
对折叠式动臂工作装置进行简化处理后建模,再对其进行仿真分析,以期得到更加接近实际挖掘作业工况下的动态特性仿真。
1 折叠式动臂工作装置运动学模型基于多体动力学建模方法—拉格朗日方程对折叠式动臂工作装置进行动力学建模,模型的建立基于上文得到的D-H 变换矩阵。
该模型有空间转换矩阵推导出,最终得到的是封闭式力矩函数表达式。
以后动臂与机架的链接铰点建立系统基坐标系,考虑到折叠式动臂工作装置的结构特征,将前动臂和后动臂简化为一体,得出三个自由度的折叠式动臂工作装置动力学方程如下。
液压挖掘机工作装置在ADAMS中的运动仿真解析

液压挖掘机工作装置在ADAMS中的运动仿真解析姓名:XXX部门:XXX日期:XXX液压挖掘机工作装置在ADAMS中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。
文章基于动力学仿真软件ADAMS建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。
液压缸顺序工作的运动仿真分析1.1.基于尺寸确定当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。
简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。
在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。
在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。
例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。
1.2.顺序工作运动仿真实现的路线仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。
可以在液压缸移动副约束处添加移动驱动,改变运动方式,第 2 页共 5 页将其更换成位移运动方式。
运动的函数输入时,需要注意相匹配的的STEP函数。
对液压缸进行STEP函数值设置时,应该满足运动函数需求。
当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。
1.3.仿真过程当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。
可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。
基于ADAMS的车辆起重机液压起竖回路仿真分析

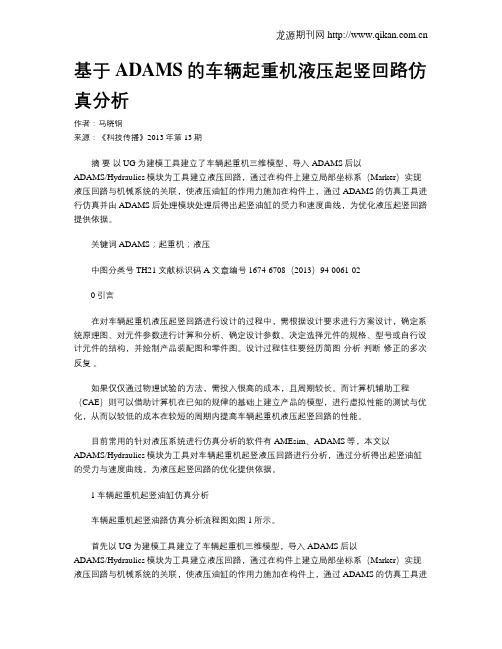
基于ADAMS的车辆起重机液压起竖回路仿真分析摘要以ug为建模工具建立了车辆起重机三维模型,导入adams 后以adams/hydraulics模块为工具建立液压回路,通过在构件上建立局部坐标系(marker)实现液压回路与机械系统的关联,使液压油缸的作用力施加在构件上,通过adams的仿真工具进行仿真并由adams后处理模块处理后得出起竖油缸的受力和速度曲线,为优化液压起竖回路提供依据。
关键词 adams;起重机;液压中图分类号th21 文献标识码a 文章编号 1674-6708(2013)94-0061-020引言在对车辆起重机液压起竖回路进行设计的过程中,需根据设计要求进行方案设计,确定系统原理图、对元件参数进行计算和分析、确定设计参数、决定选择元件的规格、型号或自行设计元件的结构,并绘制产品装配图和零件图。
设计过程往往要经历简图-分析-判断-修正的多次反复。
如果仅仅通过物理试验的方法,需投入很高的成本,且周期较长。
而计算机辅助工程(cae)则可以借助计算机在已知的规律的基础上建立产品的模型,进行虚拟性能的测试与优化,从而以较低的成本在较短的周期内提高车辆起重机液压起竖回路的性能。
目前常用的针对液压系统进行仿真分析的软件有amesim、adams 等,本文以adams/hydraulics模块为工具对车辆起重机起竖液压回路进行分析,通过分析得出起竖油缸的受力与速度曲线,为液压起竖回路的优化提供依据。
1车辆起重机起竖油缸仿真分析车辆起重机起竖油路仿真分析流程图如图1所示。
首先以ug为建模工具建立了车辆起重机三维模型,导入adams 后以adams/hydraulics模块为工具建立液压回路,通过在构件上建立局部坐标系(marker)实现液压回路与机械系统的关联,使液压油缸的作用力施加在构件上,通过adams的仿真工具进行仿真并由adams后处理模块处理后得出起竖油缸的受力和速度曲线,为优化液压起竖回路提供依据。
基于ADAMS的挖掘机工作装置的仿真与优化设计概要

第30卷第3期2009年3月煤矿机械CoalM ine MachineryVol.30No.3Mar.2009基于ADA MS的挖掘机工作装置的仿真与优化设计潘玉安1,程洪涛2,姜迪友2,梁刚3,聂陶荪1(1.景德镇陶瓷学院机电工程学院,江西景德镇333403;2.江西蓝天学院(瑶湖校区,南昌330098;3.景德镇高等专科学校,江西景德镇333000摘要:建立了该类反铲挖掘机工作装置虚拟样机的ADAMS仿真模型,基于虚拟样机技术和广义简约梯度法以铲斗、斗杆和动臂油缸的工作压力最小为目标,对铲斗机构、斗杆机构、动臂机构的构造点进行了仿真优化设计。
仿真结果表明,在规定的约束条件下,工作装置达到了优化设计的目的。
关键词:ADAMS;挖掘机;工作装置;仿真中图分类号:T D422.2文献标志码:A文章编号:1003-0794(200903-0015-03Based on ADA MS of W orki n g Equi p ment ofExcavator Devi ce Si m ul ati on and Desi gn Opti m i zati onPAN Y u-an1,CHENG Hong-t ao2,J I ANG D i-you2,L I ANG Gang3,N I E Tao-sun1(1.Mechatr onics College,J ingdezhen Cera m ic I nstitute,J ingdezhen333403,China;2.J iangxi B lue Sky University Yaohu B ranch,Nanchang330098,China;3.J ingdezhen Comp rehensive College,J ingdezhen333000,ChinaAbstract:Backhoe work device of the class virtual p r ot otype ADAMS si m ulati on mode has been estab2 lished.The m ini m u m target which bucket and ar m and boom oil cylinder of working p ressure based on virtual p r ot oyp ing technol ogy and generalizded reduced gradient method.Op ti m ized the bucket mecha2 nis m,ar m mechanis m and boom mechanis m of the constructi on point.Under the regulati ons of constraint conditi ons,the si m ulati on results show that it successfully.Key words:ADAMS;excavat or;working equi pment;si m ulati on0引言单斗挖掘机是一种应用广泛的工程机械。
基于ADAMS和MATLAB的挖掘机工作装置动力学仿真
基于ADAMS和MATLAB的挖掘机工作装置动力学仿真韩鹏太原重工股份有限公司技术中心摘要:根据我公司某机械式挖掘机的结构及运动特性,采用多体动力学仿真的方法,联合ADAMS与MA TLAB建立该挖掘机工作装置的虚拟样机,对其进行动力学仿真分析,得到挖掘过程中铲斗内物料重力,挖掘阻力以及提升、推压方向的位移、速度、作用力等关键参数的变化曲线。
结果表明,虚拟样机参数选择准确,仿真结果合理,可以快速地预测工作装置的性能,为工作装置的性能设计提供合理依据。
关键词:机械式挖掘机;工作装置;动力学仿真Dynamic simulation of working device of excavator based onADAMS and MATLABHan PengTechnical Center, Taiyuan Heavy Group Co., Ltd., Taiyuan 030024, Shanxi, China Abstract: According to the configuration and characteristics of a mechanical excavator, the virtual prototype of the working device was established with ADAMS and MATLAB based multi-body dynamics method. The dynamic simulation and analysis were conducted, and the variation curves of the gravity of material in bucket, the excavating resistance, the pushing force and the elevating force etc. during excavating process were obtained. The results showed that the selection of virtual prototype parameter was accurate, and the simulation results were reasonable. The simulation method can predict the performance of the working device quickly, and provide reasonable basis for the performance design of the working device.Key Words: mechanical excavator, working device, dynamic simulation大型机械式挖掘机是露天矿山开采的重要装备,直接关系着采矿工作的效率[1],因此对挖掘机工作装置的性能设计提出了非常高的要求。
利用ADAMS进行动态仿真分析的一般方法和过程111

基于ADAMS软件进行动态仿真分析的一般方法和过程摘要:本文通过对相关资料的总结归纳,介绍了虚拟样机的发展现况、ADAMS软件、特点以及利用其进行动态仿真的一般方法和过程。
并结合多功能开沟机液压系统进行了建模与仿真分析。
关键词:仿真 ADAMS 优化虚拟样机1、前言随着近代科学技术的发展,工程设计的理论、方法和手段都发生了很大的变化。
从计算机辅助工程(CAE)的广泛应用,到并行工程(CE)思想的提出与推行,从根本上改变了传统的设计方法,极大地促进了制造业的发展和革命。
但与此同时,人们已清楚地认识到:即使系统中的每个零部件都是经过优化的,也不能保证整个系统的性能是良好的,即系统级的优化绝不是系统中各部件优化的简单叠加。
于是,由CAX/DFX等技术发展而来,以系统建模、仿真技术为核心的虚拟样机技术(Virtual Prototyping)得到了迅速发展,并正成为各国纷纷研究的新的热点。
虚拟样机技术(Virtual Prototyping Technology)是当前设计制造领域的一项新技术,其应用涉及到汽车制造、工程机械、航空航天、造船、航海、机械电子、通用机械等众多领域。
它利用计算机软件建立机械系统的三维实体模型和运动学及动力学模型,分析和评估机械系统的性能,从而为机械产品的设计和制造提供依据。
虚拟样机技术可使产品设计人员在各种虚拟环境中真实地模拟产品整体的运动及受力情况,快速分析多种设计方案,进行物理样机而言难以进行或根本无法进行的试验,直到获得系统的最佳设计方案为止。
虚拟样机技术的应用贯穿着整个设计过程中,它可以用在概念设计和方案论证中,设计者可以把自己的经验与想象结合在虚拟样机里,让想象力和创造力得到充分地发挥。
用虚拟样机替代物理样机,不但可以缩短开发周期而且设计效率也得到了很大的提高。
本文以ADAMS为平台,简单说明一下进行虚拟样机的动态仿真分析的一般方法和过程。
2、ADAMS软件简介及特点ADAMS(Automatic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc,现已经并入美国MSC公司)开发的最优秀的机械系统动态仿真软件,是目前世界上最具权威性的,使用范围最广的机械系统动力学分析软件,在全球占有率最高。
Adams运动仿真例子起重机的建模和仿真

1起重机的建模和仿真,如下图所示。
1)启动ADAMS1。
运行ADAMS,选择create a new model;2。
modal name 中命名为lift_mecha;3。
确认gravity 文本框中是earth normal (—global Y),units文本框中是MKS;ok4. 选择setting-—working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口.2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4。
设置实体参数;On groundLength :12Height:4Depth:85。
鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7。
左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2。
25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting-working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount。
cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing-working grid ,设置spacing中X和Y均为0。
液压挖掘机工作装置建模分析与仿真
液压挖掘机工作装置建模分析与仿真钟星;邵辉;胡伟石【摘要】针对液压挖掘机运动学和动力学建模复杂过程,以某型6t挖掘机工作装置为研究对象,利用Sim-Mechanics对机械结构进行快速建模,从而代替运动学模型获得挖掘机机构模型.采用Pro/E软件对液压挖掘机工作装置建立三维模型,将其导入ADAMS环境中,并对比验证作业结果.在ADAMS软件中,对挖掘机工作装置进行动力学仿真,得到液压挖掘机的工作特性曲线.仿真结果表明:理论上添加的载荷能够体现在各个驱动关节处受力变化中,相比其他阶段,在挖掘阶段关节受力矩变化影响较为复杂.%Motivated by complicated kinematics and dynamics modeling processes for hydraulic excavator,the presented paper aims to analyze mechanism modeling in 6 t hydraulic excavator.By usingMATLAB/SimMechanics,the mechanical structure of the excavator was modeled rapidly instead of kinematics model.Its 3D model was constructed by using Pro/E and it was imported to ADAMS for remodeling.The reachable working area was compared with the result given by SimMechanics model.Furthermore,dynamics simulation of excavator working device were carried out with ADAMS software,and the working characteristic curves of the hydraulic excavator were obtained.The results of the simulation show that in theory added load on excavator bucket can be reflected in the torque change at each pared with other stages,the torque change is more complicated in the excavation stage.【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2017(038)005【总页数】6页(P602-607)【关键词】液压挖掘机;机构模型;动力学分析;ADAMS软件【作者】钟星;邵辉;胡伟石【作者单位】华侨大学信息科学与工程学院,福建厦门361021;华侨大学信息科学与工程学院,福建厦门361021;华侨大学实验室与设备管理处,福建厦门361021【正文语种】中文【中图分类】TU621Abstract: Motivated by complicated kinematics and dynamics modeling processes for hydraulic excavator, the presented paper aims to analyze mechanism modeling in 6 t hydraulic excavator. By usingMATLAB/SimMechanics, the mechanical structure of the excavator was modeled rapidly instead of kinematics model. Its 3D model was constructed by using Pro/E and it was imported to ADAMS for remodeling. The reachable working area was compared with the result given by SimMechanics model. Furthermore, dynamics simulation of excavator working device were carried out with ADAMS software, and the working characteristic curves of the hydraulic excavator were obtained. The results of the simulation show that in theory added load on excavator bucket can be reflected in the torque change at each joint. Compared with otherstages, the torque change is more complicated in the excavation stage. Keywords: hydraulic excavator; mechanical structure model; dynamics analysis; ADAMS software挖掘机是执行各项工业工程任务的重要设备,在工业、交通、运输、建筑、水利、矿山开采等各个领域中已被广泛使用[1].在某些复杂、危险及特殊的工作场合,冲击和振动多,不适合人工操控,自主挖掘成为不可或缺的得力助手,这也促使挖掘机向智能化、自动化方向发展.对液压挖掘机的工作装置进行建模分析是实现自动挖掘的重要研究基础.卡内基梅隆大学设计出能够按照一定的策略自主挖掘装载的机器人[2-3].Hall等[4]将迭代算法运用于对挖掘机的铲斗运动轨迹的控制,并将该算法应用于其他多杆机构.Tomi等[5]讨论了用全球定位系统(GPS)及CAD模型精确定位挖掘机的移动位置的方法,并采用ADAMS与MATLAB/Simulink进行了联合仿真验证.目前,大多采用类比法、查阅表格法、相关理论计算等对挖掘机工作装置进行作业可达范围研究[6].这些方法计算量大、精度低且耗时.以往的动力学分析主要集中在强度、刚度、结构优化等方面[7-8],对动态过程的动力学分析较少[9].为此,文中对液压挖掘机工作装置进行建模分析与仿真[10].以某型6 t液压挖掘机为研究对象,在MATLAB工具箱中的SimMechanics基础上,建立挖掘机机械结构模型,只需根据动臂、斗杆和铲斗的绝对转角变化信息,即可获得挖掘机作业轨迹和可达范围.该方法简化了计算和分析过程,简单快捷.同时,采用Pro/E软件建立挖掘机工作装置的三维模型,并将其导入ADAMS软件中,添加相应的运动副、约束和驱动函数,进行仿真、对比、分析,验证其可行性.1.1 基于MATLAB/SimMechanics建立机构模型液压挖掘机结构示意图[11-13],如图1所示.图1中:A~D分别为动臂下铰点、动臂与斗杆的铰点、斗杆与铲斗的铰点、斗齿尖.利用MATLAB/SimMechanics建立挖掘机仿真模型的步骤,如图2所示.基于MATLAB/SimMechanics的工作装置模型,如图3所示.图3中:工作装置模型是由1个机械环境模块、1个地模块、3个刚体模块、3个关节转动副模块和3个铰接点运动激励模块等组成.文中刚体质量、转动惯量和质心均不予以考虑,并根据6 t挖掘机的实际参数对应于各个模块进行赋值.1.2 基于Pro/E与ADAMS建立机构模型运用Pro/E对液压挖掘机工作装置建立三维模型,如图4所示.利用PARASOLID格式将挖掘机几何模型导入ADAMS中,并添加相应的运动副和约束,为挖掘机工作装置分配时间,添加驱动函数.1.3 仿真与分析基于SimMechanics建立的机构模型,在其可达范围仿真过程中,时间设为无限长,初始状态为各关节最大伸展状态.挖掘机模型在t=7.2 s时的状态图,如图5所示.t=9 605 s时,铲尖运动轨迹的输出情况,如图6所示.图6中:LX,LY分别表示X,Y方向上的位移.由图6可知:最大挖掘深度h1=4.531 1 m,最大抬升高度h2=5.497 1 m,最大水平挖掘范围h3=5.562 8 m.完成包络线的运动过程中,各曲线段运动过程中动臂、斗杆和铲斗的动作情况,如表1所示.基于ADAMS建立的机构模型,在其可达范围仿真过程中,采用ADAMS函数库中的STEP函数控制液压油缸的伸缩行程,设置各个液压油缸STEP函数,如表2所示.在铲尖处创建Marker测量点,方便对铲尖位置的测量.选取初始状态为各液压缸全缩状态,仿真时间设置为16 s,步长为500,仿真计算并显示结果.通过运动仿真绘制的挖掘机工作装置作业范围,如图7所示.为了验证仿真模型的可靠性,将图6,7所示的结果进行比较.由图6,7可知:运用SimMechanics获得挖掘机工作过程中,最大挖掘高度、挖掘半径、卸载高度与ADAMS软件仿真模拟实际作业结果基本吻合,从而验证了方法的正确性.2.1 挖掘载荷的计算液压挖掘机在进行挖掘任务时,可采用斗杆挖掘、铲斗挖掘和混合挖掘等多种作业方式,工作装置所承受的挖掘阻力因采取的挖掘方式不同而不同[14-15].一般情况下,挖掘过程是以各液压油缸同时伸缩的混合挖掘方式进行的[16-17].挖掘阻力可按照挖掘轨迹的切线方向和法线方向分解为WQ和Wf[18],有式(1)中:K0为挖掘比阻力系数;b为铲斗平均宽度或挖掘宽度;h为挖掘深度;μ挖掘阻力系数.对液压挖掘机完成一个挖掘工作周期进行研究.其中,工作周期包括到达挖掘起始点位置、挖掘、提升和卸料4个环节.故采用混合挖掘机阻力进行计算,挖掘土壤类型选取Ⅲ级,挖掘比阻力系数K0取19.5 N·cm-2,斗宽b取90 cm,挖掘深度h取27.9 cm,挖掘阻力系数μ取0.42.计算得WQ=48.96 kN,Wf=20.57 kN.挖掘土壤产生的重力为式(2)中:ρ为土壤的密度,取1.8×10-6 kg·m-3;g为重力加速度,取9.8 m·s-2;V为铲斗容量,取0.25 m3.经过计算,可得G=4.4 kN.2.2 仿真与分析在进行动力学仿真前,利用ADAMS建立的挖掘机工作装置模型,在一个基本的工作周期内,对各个阶段进行时间分配、驱动函数添加与载荷的添加.液压挖掘机的工作循环图,如图8所示.选取动臂油缸、斗杆油缸和铲斗油缸均全缩的状态为初始状态,仿真时间设为20 s,步长为500,通过后处理模块得到的特性曲线,如图9~12所示.由图9可知:土壤重力是从2 s初铲斗开始执行挖掘任务时,由零逐渐增大,在7 s 末挖掘任务结束时,重力增加至最大值4.40 kN,此时,铲斗处于满载状态;之后,在动臂提升阶段至卸载前均保持不变,到11 s初铲斗开始卸载,重力不断减小,直到16 s末土壤完全卸空,重力降为零;挖掘法向和切向阻力在2 s初铲斗进行挖掘时,由零逐渐增大,在4.5 s末分别达到最大值48.96,20.57 kN;然后,随着铲斗开始收斗后逐渐减小,直至完成挖掘任务后降为零.由此可知,载荷和重力可以合理地体现在挖掘的过程中.按时间顺序对图10~12进行如下分析.1) 0~2 s是到达初始挖掘点(最大挖掘半径点)阶段.该阶段是由动臂油缸完成,动臂油缸伸长至2 s末,到达最大位置0.35 m,油缸速度先增后减,斗杆油缸与铲斗油缸位移(L)和速度(v)均保持不变.由于自重与惯性力的影响,动臂的驱动关节力矩(T)有一个较大的突变,在短时间内减小至零,然后增大,另外2个驱动关节力矩较小,且变化幅度也不大.2) 2~7 s是挖掘阶段.此阶段由斗杆油缸与铲斗油缸共同配合完成,斗杆油缸在2 s初开始伸长,6 s末到达最大位置0.55 m,随后保持不变.铲斗油缸从3 s初伸长至7 s末,到达最大位置0.565 m.斗杆油箱和铲斗油缸速度均呈现先增后减的状态,而动臂油缸位移与速度则保持不变.3个驱动关节力矩均经历了先增后减的过程.在4.3 s时,斗杆的驱动关节力矩达到最大值,铲斗的驱动关节力矩达到最大值,动臂的驱动关节所受力矩达到最大值.之后,3个驱动关节力矩除了在6.8 s左右至挖掘任务即将结束时,动臂的驱动关节力矩有小幅度增加,其余总体趋势大致都在减小,由此可知,液压油缸的减速伸长对挖掘机工作装置系统造成了一定的冲击影响.3) 7~11 s是满铲提升阶段.在此阶段中,斗杆油缸与铲斗油缸均不动作,动臂油缸由原来的0.35 m收缩至0.10 m.其中,3组油缸速度均经历了先增后减的过程,3个驱动关节力矩基本稳定.4) 11~16 s是卸载阶段.此阶段中,动臂油缸不参与运动,故动臂油缸不动作,速度为零.斗杆油缸在11 s初收缩,14 s收缩至最短,油缸速度也在同时刻先增后减,铲斗油缸在14 s开始收缩直至卸载结束,油缸速度在11~14 s,以及14~16 s均经历了先增后减的过程.由于自重和惯性力的作用,3个驱动关节力矩都有所增加,卸载过程所受外载荷越来越小,所以驱动关节受力矩有些许的突变.5) 16~20 s是返回初始状态阶段.该阶段动臂油缸收缩至最短,速度先增后减.斗杆油缸与铲斗油缸位移和速度均保持不变.3个驱动关节力矩基本都是平稳下降的,仅在动臂开始和制动时有小幅度的突变.纵观挖掘机的整个运动过程可知:3个驱动关节力矩总体变化趋势基本相似,但由于挖掘机工作姿态的变化对动臂的驱动关节力矩产生一定的冲击影响,突变明显.工作装置惯性载荷与挖掘机液压系统对其存在密不可分的影响.在自动挖掘过程中,通过实时分析获得各个驱动关节力矩、液压缸位移和速度变化曲线,为更好地实现平滑挖掘,高效挖掘奠定基础.对挖掘机工作装置机械结构与动力学问题进行理论建模,利用SimMechanics快速建模绘制机械结构运动的包络图,获得挖掘机可达工作范围,进一步运用Pro/E 对挖掘机工作装置建立三维模型,将模型导入ADAMS软件,对挖掘机工作装置的作业范围进行对比,验证方法的正确性.采用ADAMS软件,对挖掘机工作装置进行动力学仿真,得到挖掘机油缸位移、速度和各个驱动关节力矩与时间的特性曲线,对实现自主挖掘具有重要意义.仿真结果表明:理论上添加的载荷能够体现在各个驱动关节处受力变化中,相比其他阶段,受力矩变化较为复杂的是在挖掘阶段,该研究为今后挖掘机实现自动挖掘提供理论依据,为进一步研究挖掘机自主平滑避障轨迹规划和有限元分析力的加载奠定基础,也为实际的挖掘作业提供指导.【相关文献】[1] 吕鹏伟.液压挖掘机工作装置动力学特性的研究[D].太原:太原科技大学,2013.[2] PEYRET F,JURASZ J.The computer integrated road construction project[J].Automation in Construction,2000(9):447-461.[3] SINGH S,CANNON H.Muti-resolution planning for earth moving[C]∥Proceedings International Conference on Robotics and Automation.Leuven:[s.n.],1998:121-126.[4] HALL A S,MCAREE P R.Robust bucket position tracking for a large hydraulic excavator[J].Mechanism and Machine Theory,2005,40(1):1-16.[5] TOMI M,KELERVO N,RAUNO H.Automation of an excavator based on a 3D CAD model and GPS measurement[J].Automation in Costruction,2006,15(5):571-577.[6] 李杨民,谢存禧,王骥湘.液压挖掘机工作装置动臂、斗杆机构的多体系统运动学分析[J].建筑机械,1994(11):22-25.[7] LEE M C,CHUNG S H,CHO J H,et al.Three-dimensional finite element analysis of powder compaction process for forming cylinder block of hydraulic pump[J].Powder Metallurgy,2008,51(1):89-94.[8] SUI Tianzhong,WANG Lei,TAN Zhen,et al.Structural parameters optimization of excavator working device based on mining process[J].Advanced MaterialsResearch,2012,421:759-763.[9] 张树忠,邓斌,柯坚.基于液压变压器的挖掘机动臂势能再生系统[J].中国机械工程,2010,21(10):1160-1166.[10] 吕广明,刘明思,杨扬,等.基于Pro/E ADAMS的液压挖掘机工作装置的动力学仿真分析[J].建筑机械,2013(17):86-90.[11] 林慕义,史青录.单斗液压挖掘机[M].北京:冶金工业出版社,2011:35-57.[12] 刘韬.液压挖掘机工作装置结构特性分析与仿真[D].长沙:中南大学,2010.[13] 郑东京.挖掘机工作装置的有限元分析及其仿真[D].杨凌:西北农林科技大学,2011.[14] 王敏.液压挖掘机工作装置的动态仿真及有限元分析[D].西安:长安大学,2015.[15] 王在昌.液压挖掘机工作装置动力学分析及有限元优化分析[D].济南:山东科技大学,2011.[16] 张桂菊,肖才远,谭青,等.基于虚拟样机技术挖掘机工作装置动力学分析及仿真[J].中南大学学报(自然科学版),2014(6):1827-1833.[17] 郭银赛,张毅,程明科.基于虚拟样机技术的挖掘机工作装置运动仿真与优化设计[J].机床与液压,2015,43(15):169-172.[18] 李渊博,何清华,张大庆.液压挖掘机工作装置动力学分析与仿真研究[J].机床与液压,2006(10):170-171.。
基于AMESim与Adams联合仿真的挖掘机铲斗特性研究

基于AMESim与Adams联合仿真的挖掘机铲斗特性研究应用大型系统仿真软件AMESim7.0和Adams2010建立了正流量挖掘机液压系统与工作装置动力学模型,建立联合仿真平台分析了挖掘机的铲斗联的压力特性和位移特性等,研究结果表明:仿真结果和真实结果相似,且相比AMESim 单平台仿真更准确。
标签:AMESim与Adams联合仿真软件;挖掘机铲斗;特性研究引言作为挖掘机直接完成工况要求的工作装置,铲斗性能的稳定发挥尤为重要。
本研究以某中型挖掘机为对象,根据挖掘机的铲斗联回路建立AMESim模型图,使用ADAMS软件建立整机动力学模型,然后对铲斗的操作进行精确控制。
1 模型建立1.1 挖掘机铲斗联液压系统的AMESim建模1.主控阀2.铲斗合流阀3.防反转阀4.铲斗液压缸图1 铲斗动作液压回路如图1所示,所研究的液压挖掘机的铲斗联的液压回路,回路包括有双联泵、主控阀1、铲斗合流阀2、防铲斗反转阀3和铲斗油缸4。
控制铲斗油缸的主控阀只有1根阀芯,控制铲斗的两个动作。
主控阀处于左位时,铲斗外摆动作,此动作负载较小,只需克服铲斗的重力,铲斗合流阀不工作,达到节能的效果;主控阀处于右位时,铲斗内收动作,由于铲斗在挖掘机时受到的负载力很大,所以这个动作需要铲斗合流阀的合作,从而完成铲斗合流动作,提高挖掘机作业效率。
为了防止铲斗在挖掘时负载过大而可能引起铲斗液压缸活塞杆反向运动,在回路中装有单向阀,起到保护作用。
利用AMESim软件依照原理图对挖掘机铲斗联回路进行建模。
由液压原理图可知系统采用双联泵,液压挖掘机多路阀实质是三位六通阀的组合,为了满足挖掘机的各类工况,在多路阀的阀芯上会开有各式各样的节流槽,本研究选用HCD库中的BAO22模型来搭建,然后只需在模型中设置相应的参数即可完成仿真动作。
最终建立模型如图2所示。
1.2 挖掘机工作装置ADAMS建模由于ADAMS本身建模的复杂性,首先采用三维软件PROE进行挖掘机整机的建模,然后导入ADAMS中进行动力学分析。
adams_挖掘机建模过程及运动仿真

图 1- 2 完成车架模型
1.3 建立动臂模型
使用工具 Extrusion 建立动臂模型,选择由点创建,各点坐标如图 1-3 所示, length=500mm,并倒角,在动臂左端建立 marker48,右侧建立 marker18,移动使 marker18 与车架上的 marker14 重合;
图 1- 3 动臂拉伸建模坐标点 2
斗杆 铲斗液压缸 铲斗液压杆 摆杆上连杆(左) 摆杆上连杆(右) 摆杆上连杆(左) 摆杆上连杆(右) 摆杆下连杆(左) 摆杆下连杆(右) 摆杆下连杆(左) 摆杆下连杆(右)
铲斗 液压杆(四处)
Revolute Spherical Cylinder Cylinder Cylinder Spherical
斗杆完成如图 1-7 所示。
图 1- 6 斗杆拉伸坐标点
4
1.6 建立铲斗模型
图 1- 7 完成斗杆模型
使用工具 Extrusion 建立铲斗外形模型,选择由点创建,各点坐标如图 1-8 所示,
length=900mm
使用工具 Extrusion 建立铲斗内腔模型,选择由点创建,各点坐标如图 1-9 所示,
6-8 s 底盘转 过 90 度
8-10 s 收铲斗
10-12 s 底盘反 向转过 90 度 收斗杆 伸铲斗
12-14 s 收动臂 伸斗杆 伸铲斗
动臂液压缸动作函数:STEP ( time , 0 , 0 , 2 , -200 )+
STEP ( time , 2 , 0 , 4 , 200 )+
STEP ( time , 4 , 0 , 6 , -500 )+
铲斗液压缸动作函数:STEP ( time , 0 , 0 , 2 , -300)+ STEP ( time , 2 , 0 , 4 , 400 )+ STEP ( time , 4 , 0 , 8 , 0 )+ STEP ( time , 8 , 0 , 10 , -400 )+ STEP (time, 10, 0, 14, 300)
基于ADAMS的液压支架运动学分析

基于ADAMS 的液压支架运动学分析王立新1,李 震2,王锁吉2(1.安阳工学院,河南安阳455000; 2.河南安彩集团,河南安阳455000)摘要:介绍一种模型数据流畅交换的联合仿真分析方法,通过对液压支架可视化动态模拟、干涉检查和运动学分析,验证所建立的数字化样机正确合理,分析结果对液压支架的设计分析和性能评估具有参考价值。
关键词:液压支架;运动学分析;三维模型中图分类号:T D355 文献标志码:A 文章编号:100320794(2008)1220082203K inem atics Analysis of H ydraulic Support B ased on ADAMSWANG Li -xin 1,LI Zhen 2,WANG Suo -ji2(1.Anyang Institute of T echnology ,Anyang 455000,China ;2.Henan Ancai G roup ,Anyang 455000,China )Abstract :A unity simulation analysis method that it can fluent exchange m odel data was introduced ,in the base of hydraulic support visualization development imitate ,intervene examination and kinematics analysis ,verify correct and reas onableness of hydraulic support virtual digitized prototype ,the result has reference value to hydraulic support design and property appraised.K ey w ords :hydraulic support ;kinematics analysis ;3-D m odel0 前言本文以ZY 8700Π17Π32型液压支架为例,通过理论计算分析与运动学分析,得出液压支架基本概况,为进一步改善液压支架的受力情况、改进结构提供依据。
挖掘机液压元件的建模及仿真
数 字 计 算 机 仿 真 是 以计 算 机 为 工 具 , 实 际 系 由 统 建 立 仿真 模 型 , 在 计 算 机 上 运 行 和 实 验 , 主 要 并 其 过 程 是 将 各 个 液 压 元 件 的物 理 系 统 通 过 理 论 推 导 和 系统 辨 识 建 立 其 数 学 模 型 的 子 模 块 , 后 由子 模 块 然 再构成仿真模型 。 利 用 仿 真 技 术 建 立 液 压 系 统 及 元 件 的 仿 真 模
中图分类号 : TH1 7 5 3 .
l
刖 舌
通 用 液 压 系 统 和专 用 液 压 系 统 仿 真 计 算 的 前 提
是 液压 容 腔 、 压 泵 、 压 缸 、 液 液 平衡 阀 、 流 阀 等基 本 溢 液 压 子 系 统 模 型 的 建 立 , 在 挖 掘 机 液 压 系 统 的 仿 这 真 计 算 中也 是 十分 重 要 的 。本 文 将 对 挖 掘 机 液 压 系
[ 要 ] 文提 出 了在 ADAMS中建 立 虚 拟 样 机 环 境 , 过 AD 摘 本 通 AMS Co to 接 口与 Smuik中 建 立 液 压 容 / nrl i l n
腔 、 压 泵 、 压 缸 、 衡 阀 、 流 阀 等 液 压 子 系统模 型 , 实现 挖 掘 机 虚 拟 样 机 环 境 的 机 电 液 一 体 化 联 合 仿 液 液 平 溢 为
易 于 参 数修 改 的 子 模块 , 模 型 的 最 上 层 , 各 处模 在 对
块 进 行连 接 即 可建 立 系统 的 仿 真 模 型 。 利 用 Smu , i —
和液 压 系 统综 合评 价 方 面 。在 通 用 液 压 系 统 方 面 , 已开 发 了较 多 的通 用 仿 真 软件 。如 德 国 亚琛 大 学 研 制 的 液 压 系统 一数 字 仿 真 软 件 一DS 英 国 B H; ATH 大 学 开 发 的 HAS P液 压 仿 真 程 序 包 ; 兰 华 沙 大 学 波
基于ADAMS的车辆起重机液压起竖回路仿真分析
基于ADAMS的车辆起重机液压起竖回路仿真分析作者:马晓钢来源:《科技传播》2013年第13期摘要以UG为建模工具建立了车辆起重机三维模型,导入ADAMS后以ADAMS/Hydraulics模块为工具建立液压回路,通过在构件上建立局部坐标系(Marker)实现液压回路与机械系统的关联,使液压油缸的作用力施加在构件上,通过ADAMS的仿真工具进行仿真并由ADAMS后处理模块处理后得出起竖油缸的受力和速度曲线,为优化液压起竖回路提供依据。
关键词 ADAMS;起重机;液压中图分类号TH21 文献标识码A 文章编号 1674-6708(2013)94-0061-020引言在对车辆起重机液压起竖回路进行设计的过程中,需根据设计要求进行方案设计,确定系统原理图、对元件参数进行计算和分析、确定设计参数、决定选择元件的规格、型号或自行设计元件的结构,并绘制产品装配图和零件图。
设计过程往往要经历简图-分析-判断-修正的多次反复。
如果仅仅通过物理试验的方法,需投入很高的成本,且周期较长。
而计算机辅助工程(CAE)则可以借助计算机在已知的规律的基础上建立产品的模型,进行虚拟性能的测试与优化,从而以较低的成本在较短的周期内提高车辆起重机液压起竖回路的性能。
目前常用的针对液压系统进行仿真分析的软件有AMEsim、ADAMS等,本文以ADAMS/Hydraulics模块为工具对车辆起重机起竖液压回路进行分析,通过分析得出起竖油缸的受力与速度曲线,为液压起竖回路的优化提供依据。
1车辆起重机起竖油缸仿真分析车辆起重机起竖油路仿真分析流程图如图1所示。
首先以UG为建模工具建立了车辆起重机三维模型,导入ADAMS后以ADAMS/Hydraulics模块为工具建立液压回路,通过在构件上建立局部坐标系(Marker)实现液压回路与机械系统的关联,使液压油缸的作用力施加在构件上,通过ADAMS的仿真工具进行仿真并由ADAMS后处理模块处理后得出起竖油缸的受力和速度曲线,为优化液压起竖回路提供依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压挖掘机工作装置在ADAMS中的运动
仿真解析
姓名:XXX
部门:XXX
日期:XXX
液压挖掘机工作装置在ADAMS中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法
和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。
文章基于动力学仿真软件ADAMS建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。
液压缸顺序工作的运动仿真分析
1.1.基于尺寸确定
当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。
简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。
在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。
在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。
例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。
1.2.顺序工作运动仿真实现的路线
仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。
可以在液压缸移动副约束处添加移动驱动,改变运动方式,
第 2 页共 5 页
将其更换成位移运动方式。
运动的函数输入时,需要注意相匹配的的STEP函数。
对液压缸进行STEP函数值设置时,应该满足运动函数需求。
当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。
1.3.仿真过程
当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。
可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。
这个伸缩过程需要得到弧线支撑,基于保障弧线运动轨迹基础上做好控制工作。
其中在进行一次姿态调整之后,作业范围会缩小,而且包络图中的各个点会逐渐深入挖掘机的底部,在这个范围上可以实现挖掘,但是可能出现塌陷实现,导致机械无法正常施工。
因此,一般除了有条件的挖沟作业之外进行使用,其他施工一般都不会使用。
可以在模型中建立起一个处于回转中心轴的三维坐标,将坐标点确定为(608,.0,0.0,1254.3306),这样就可以测量出方向移动值,可以得出这个位置的位移,这样便可以达到最大高度值,其实这个测量方法比较简单,也比较容易掌握。
根据曲线变化得出,从得到的曲线中得出最终的数值,可以查看到最大值,平均值以及最小值等。
工作装置模型的运动学仿真分析
2.1.参数范围
运动学仿真中的参数范围确定一般都包含速度、位移以及加速度,这些参数会有一个变化范围。
在进行运动学仿真分析中,需要基于ADAMS/Solver求解,就可以得出代数方程。
因此,在进行仿真系统自由度确认时,一般自由度的必须为零。
如果这个时候会考虑到物体的惯性
第 3 页共 5 页
以及运动质量,那么运动仿真还需要计算出运动需要的力矩以及需要的力度。
除了这些,影响运动仿真的因素还比较多,需要在检验中得出,因此需要在运动力学仿真运行之前,需要做好仿真分析工作。
虚拟装置上样机,模拟出运动态势,这样就可以充分的掌握了运动学仿真规律。
为了更加精确的描述出驱动运件的运动规律,应该将影响因素摒弃。
例如:当挖掘机动臂液压缸不断收缩中,当其收缩到一定位置上便不运动时,这个运动并不是简单的运动,它包含的运动规律比较多。
这是因为斗杆液压缸和铲斗液压缸伸缩到相应位置上时,这两个物体作用力相互进行挖掘,当力度不一致时便出现不运动现象。
这些一般都是自由度问题,在处理问题时,可以将运动分为几个过程,每个过程都有一个自由度进行支配。
当运动持续时,当达到一定状态下时,它会回到一个初始位置。
在进行分割处理时,可以清晰的看到问题所在,从而更加明确的研究出运动规律和运动过程。
对挖掘机进行动力学研究,分别从仿真角度深入解析,从而确定出液压缸运动顺序,提升仿真分析效果。
在这过程中,还得出了相应的参数尺寸。
对应的工作曲线图也得出,在实际生产中提供了可靠的数据,保障数据效益和质量。
第 4 页共 5 页
感谢您的浏览!整理范文,仅供参考。
第5 页共5 页。