机械原理第十一十二章
机械原理第十二章课后答案

第12章其他常用机构12-1棘轮机构除常用来实现间歇运动的功能外,还常用来实现什么功能?答:棘轮机构除了常用的间歇运动功能外,还能实现制动、进给、转位、分度、趙越运动等功能。
12-2某牛头刨床送进丝杠的导程为6mm,要求设计一棘轮机构,使每次送进呈可在0.2〜之间作有 级调整(共6级)。
设棘轮机构的棘爪由一曲柄摇杆机构的摇杆来推动,试绘出机构运动简图,并作必姜的计算 和说明。
解:牛头刨床送进机构的运动简图如图12-1所示,牛头刨床的横向进给是通过齿轮1、2,曲衲摇杆机构2、 3、4,練轮机构4、5、7来使与棘轮固连的丝杠6作间歇转动,从而使牛头刨床工作台实现横向间接进给。
通过 改变曲柄长度刃的大小可以改变进给的大小。
当棘爪7处于图示状态时,棘轮5沿逆时针方向作间歇进给运 动。
若将棘爪7拔出绕自身轴线转180°后再放下•由于棘爪工作面的改变.棘轮将改为沿顺时针方向间接进给。
G=^X360° = 12°O棘轮的齿数为360° 360° “0 12°设牛头刨床横向进给的初始位置如图12-1 (a)所示,则曲柄摇杆机构0。
2皿的极限位置为初始位置左右 转0/2,其中0为摇杆的摆角,极限位置如图12-1 (b)所示。
半-次进给量为0.2mm 时,帀为虽短,即得棘轮最小转角.2久 2穴 rac0 =〒仏二石".2 = 72。
每次送进量的调整方法:① 采用隐蔽棘轮罩来实现送进駅的调格:② 通过改变棘爪摆角來实现送进就的调整。
当一次进给虽为\.2tnm 时 即得棘轮最人转角当进给最为0.2/n/n 时,棘轮每次转过的角度为=—x0.2 = 6图(a)中所示,三个楝爪尖在練轮齿圈上的位置相互磅个齿風图(b)中所示,三个棘爪尖在練轮齿圈上的位買相互差I个齿距。
(a) (b)图12-212-4当电钟电压不足时,为什么步进式电钟的秒针只在原地震荡,而不能作整周回转?答:如图12-3所示为用于电钟的棘轮机构。
机械原理基础知识点总结,复习重点
机械原理知识点总结第一章平面机构的结构分析3一. 基本概念31. 机械: 机器与机构的总称。
32. 构件与零件33. 运动副34. 运动副的分类35. 运动链36. 机构3二. 基本知识和技能31. 机构运动简图的绘制与识别图32.平面机构的自由度的计算及机构运动确定性的判别33. 机构的结构分析4第二章平面机构的运动分析6一. 基本概念:6二. 基本知识和基本技能6第三章平面连杆机构7一. 基本概念7(一)平面四杆机构类型与演化7二)平面四杆机构的性质7二. 基本知识和基本技能8第四章凸轮机构8一.基本知识8(一)名词术语8(二)从动件常用运动规律的特性及选用原则8三)凸轮机构基本尺寸的确定8二. 基本技能9(一)根据反转原理作凸轮廓线的图解设计9(二)根据反转原理作凸轮廓线的解析设计10(三)其他10第五章齿轮机构10一. 基本知识10(一)啮合原理10(二)渐开线齿轮——直齿圆柱齿轮11(三)其它齿轮机构,应知道:12第六章轮系14一. 定轴轮系的传动比14二.基本周转(差动)轮系的传动比14三.复合轮系的传动比15第七章其它机构151.万向联轴节:152.螺旋机构163.棘轮机构164. 槽轮机构166. 不完全齿轮机构、凸轮式间歇运动机构177. 组合机构17第九章平面机构的力分析17一. 基本概念17(一)作用在机械上的力17(二)构件的惯性力17(三)运动副中的摩擦力(摩擦力矩)与总反力的作用线17二. 基本技能18第十章平面机构的平衡18一、基本概念18(一)刚性转子的静平衡条件18(二)刚性转子的动平衡条件18(三)许用不平衡量及平衡精度18(四)机构的平衡(机架上的平衡)18二. 基本技能18(一)刚性转子的静平衡计算18(二)刚性转子的动平衡计算18第十一章机器的机械效率18一、基本知识18(一)机械的效率18(二)机械的自锁19二. 基本技能20第十二章机械的运转及调速20一. 基本知识20(一)机器的等效动力学模型20(二)机器周期性速度波动的调节20(三)机器非周期性速度波动的调节20二. 基本技能20(一)等效量的计算20(二)飞轮转动惯量的计算20第一章平面机构的结构分析一. 基本概念1. 机械: 机器与机构的总称。
孙桓《机械原理》考研考点讲义

目 录考研分析1第一章 绪论7 第1讲 机械原理概述7第二章 机构的结构分析9 第1讲 运动副及自由度计算初步9 第2讲 计算平面机构自由度时应注意的事项13 第3讲 机构运动简图与平面机构组成17第三章 平面机构的运动分析21 第1讲 速度瞬心法21 第2讲 矢量方程图解法及综合法25 第3讲 矢量方程图解法中需说明的问题28第四章 平面机构的力分析33 第1讲 构件惯性力以及运动副中总反力33 第2讲 考虑摩擦时机构受力分析39第五章 机械的效率和自锁43第六章 机械的平衡48第七章 机械的运转及其速度波动的调节53第八章 平面连杆机构及其设计59 第1讲 平面连杆机构基础知识60 第2讲 平面连杆机构的设计(一)65 第3讲 平面连杆机构的设计(二)68第九章 凸轮机构及其设计73 第1讲 从动件运动规律及凸轮机构设计73 第2讲 凸轮机构设计中几个问题78第十章 齿轮机构及其设计84 第1讲 齿轮相关定理等理论知识点85 第2讲 齿轮相关定理等理论知识点习题专练89 第3讲 齿轮的切制与变位修正91 第4讲 齿轮参数计算95第十一章 齿轮系及其设计101第十二章 其他常用机构107考研分析教材说明 《机械原理》作 者:孙桓,陈作模,葛文杰出版社:高等教育出版社版 次:第七版其他参考书目:书名出版社作者机械原理教程清华大学出版社申永胜机械原理华中科技大学出版社杨家军主编机械原理高等教育出版社邹慧君张春林机械原理高等教育出版社王知行刘廷荣机械原理高等教育出版社郑文纬吴克坚机械原理国防工业出版社安子君机械设计基础高等教育出版社杨可桢试卷分析1.考试形式:①单考机械原理:以大题为主②机械原理+机械设计合考时:机械原理部分在填空题、选择题、计算题、作图题方面分值分布较为均匀。
侧重于基础知识点及对知识点灵活运用的考核2.考试题型及分值分布:题型单考机械原理时分值分布机械原理+机械设计时机械原理部分分值分布选择题35分左右15~20分左右填空题判断题问答题20分左右10分左右计算题50分左右20分左右作图题30分左右20分左右设计综合分析题15分左右与机械设计结构分析交叉出题3.考试内容及分值分布:章节重点难点必考点考试题型分值1绪论填空选择2机构的结构分析√√√计算填空选择问答15~253平面机构的运动分析√√√作图填空10~204平面机构的力分析√√√作图填空10~205机械的效率和自锁√√计算填空10~156机械的平衡√计算选择10~157机械的运转及其速度波动的调节√计算填空选择问答10~208平面连杆机构及其设计√√√作图计算问答15~309凸轮机构及其设计√√作图填空10~1510齿轮机构及其设计√√计算填空选择15~2011齿轮系及其设计√√√计算15~2012其他常用机构√填空选择设计104.考试题型及题型考核点分析题型考核点涉及章节备注计算题自由度计算2-2,2-6注意与轮系等组合机构的自由度计算机械效率5-1,4-3,4-4机械自锁条件5-2注意与第四章联合出题刚性转子平衡条件6-2飞轮转动惯量计算7-4等效转动惯量计算7-2,2-3齿轮机构参数计算轮系传动比计算10-4,10-5,10-8,10-9,10-10,11-2,11-3,11-4,11-7与《机械设计》中齿轮受力分析联合出题作图题瞬心法作机构速度分析矢量方程图解法作机构速度和加速度分析3-2,3-2,3-4注意综合法的运用运动副中摩擦力和支反力的分析4-3,4-4平面四杆机构的作图法设计8-4直动从动件凸轮机构轮廓曲线的设计9-3,9-4齿轮机构啮合区域作图10-5设计分析综合题机构设计方案的合理性2-3,2-41.自由度是否为零2.虚约束设计是否合理机构级别的确定2-71.机构拆分2.机构综合续表题型考核点涉及章节备注设计分析综合题用间歇机构、常用机构组合进行方案设计8-1,8-2,8-3,12-1,12-2,12-3,12-5,12-8,12-9,12-101.熟练掌握各种机构运动特点,注意四杆机构各种变形。
机械原理第12章机械运动方案设计精品PPT课件

机械运动方案设计是对机械进行设计的最为重要的 环节。运动方案设计的优劣,决定了这部机械的性 能、造价、市场前景。所谓运动方案的设计,是设 计者从多种原动机、基本机构和组合机构中选择出 合适的组合成为一部完成指定工作任务的机械系统 的全面构思。在设计之初,这种构思往往是最为艰 难的。因为完成同一工作任务,可以有多种不同工 作原理,即使工作原理相同,而设计方案也可能迥 然不同。经过认真详细地分析比较,会发现各种不 同的方案各有利弊,然后根据主要的评价原则,舍 其余而选其一。这种淘汰过程往往也是非常艰苦的。 运动方案设计的结果常常是绘出一张由线条和符号 组成的机械运动简图。
从对牛头刨床的分析可以看出,不同执行构件的运动可由不同或相同的机构去分别完成,但由 于各机构间紧密的传动配合关系,使其运动必然相互协调一致或有序,这是因为所有的运动都 服务于工件表面刨削这同一任务。
图12.1 牛头刨床
对于一部机械或机器的设计,一般应遵循以下步骤: (1) 确定其所要完成的工作任务。如进行工件的切削加工、锻压钢坯、搬运工
第12章 机ቤተ መጻሕፍቲ ባይዱ运动方案设计
● 12.1 概 述 ● 12.2 组 合 机 构 ● 12.3 原动机类型与机构选型 ● 12.4 执行机构间运动的协调配合及运动循环图 ● 12.5 机械运动方案设计
第12章 机械运动方案设计
内容提要 :主要介绍机械系统运动方案设计的任务 及主要设计步骤;原动机的类型、执行构件的运动 类型、执行机构和传动机构类型和选择;执行构件 的协调配合关系和运动循环图及其绘制方法;机构 组合的基本知识及常用的拟订机械传动系统方案的 方法。
件等,不同的工作任务应设计不同的机械完成。 (2) 根据机器的工作任务要求进行功能分解。对需要采取的加工工艺方法或工
机械原理_课后习题答案免费(全面)高教版 西北工大
2) 求vC2
v C 2 = v B + v C 2 B = v C 3 + vC 2 C 3
方向: 大小: ⊥AB
√
⊥BC ?
0 0
∥BC ?
取
μv = 0.005
m/s mm
作速度图
b
题3-10 解(续2)
[解] (2)速度分析
v B → vC 2 → v D , v E → ω 2
1) 求vB 2) 求vC2 3) 求vD 和求vE 用速度影像法
C
E
vC = v B + vCB v D = v B + v DB
(2) 求vE
D p(a, f )
v E = vC + v EC = v D + v ED
b d e c
题3-5 解
b) 解: 顺序 (1) 求vC
v B → vC → v E → v F
D B vB A E G F C
vC = v B + vCB
√
0 0
∥CD ?
b2 (b1) (b3)
其中 a B3B2 = 2ω2 v B3B2 = 0(∵ v B3B2 = 0)
a B1 ⎛ m / s 2 ⎞ 取 μa = ⎜ ⎟ 作加速度图 p ' b '1 ⎝ mm ⎠
题3-8 c) 解(续2)
[解] (3)加速度分析 a B 2 ( = a B1 ) → a B 3 → a C 3 1) 求aB2 A 1 ω1 2) 求aB3
取
√ v ⎛m/s⎞ μ v = B1 ⎜ ⎟ 作速度图 pb1 ⎝ mm ⎠
3) 求vC3 : 用速度影像法
v C 3 = 0 同时可求得 ω3 =
机械原理总复习知识点及例题

在图示的凸轮机构中,凸轮为原动件,其形状为一偏心轮, (1)画出基圆,并在图上指出其基圆半径rb; ⑶ 画出机构在图示位置时推杆位移和压力角; ⑷ 画出凸轮由图示位置沿逆时针方向转90°后推杆位移和压力角.
第五章齿轮机构及其设计
一基本概念: 1 齿廓啮合基本定律; 2渐开线的特性; 3渐开线齿廓的啮合特点; 4渐开线齿轮的基本参数和几何尺寸; 5一对齿轮的正确啮合条件; 6斜齿轮当量齿轮的含义; 7什么叫齿轮传动的重合度?其意义何在? 8渐开线齿轮变位修正的目的。 二填空题: 1内啮合斜齿圆柱齿轮传动的正确啮合条件是( ),蜗轮蜗杆的正确啮合条件是 ( ); 2一对斜齿圆柱齿轮传动的重合度由( )两部分组成,斜齿轮的当量齿轮是指( )的 直齿轮; 3渐开线齿轮的齿廓形状取决于 半径的大小,其值越大齿廓形状越 。 4采用 法切制渐开线齿廓时发生根切的原因是 。 5斜齿轮的当量齿数ZV = ,圆锥齿轮的当量齿数ZV = 。 6一个采取负变位修正的直齿圆柱齿轮与同样基本参数的标准齿轮相比较,其( ) 圆及( )圆变小了;而( )圆及( )圆有大小则没有变。
第十二章机械的效率和自锁
一基本概念: 1机械效率的定义,机械效率的意义; 2什么叫机构的自锁; 3机械自锁的条件. 二填空题: 1设螺纹的升角为λ,接触面的当量摩擦系数为( ),则螺旋副自锁的条件为 ( )。 2移动副的自锁条件是 ,转动副的自锁条件是 ,从效率的观点来看,机构 的自锁条件是 。 三简答题: 1何谓摩擦圆?为何要引进摩擦圆的概念?摩擦圆的大小与哪些因素有关? 2何谓机构的自锁?举出两种工程中利用机械自锁完成工作要求的实例。
第二章机构的结构分析
一基本概念: 1机构的组成; 2运动副的概念; 3机构自由度的计算,注意复合铰链、局部自由度和虚约束的处理; 4机构具有确定运动的条件 5何谓机构运动简图;它与实际机构有何异同。 二填空题: 1 根据机构的组成原理,任何机构都可以看作是由 、 和 组成的。 2 两构件之间线接触所组成的平面运动副,称为 副,它产生 约束, 而保留 自由度。 3机构具有确定运动的条件 。 三计算分析题: 1 计算如图所示机构的自由度,并指出复合铰链、局部自由度和虚约束。
《机械原理》知识要点

1
A e
2 4
P24
P 13
B
C
3
第三章 平面连杆机构及其设计
重 点
平面四杆机构的基本类型 平面四杆机构的基本知识
第三章 平面连杆机构及其设计
一、平面四杆机构的主要类型
1、铰链四杆机构
2、曲柄滑块机构
3、导杆机构
第三章 平面连杆机构及其设计
二、铰链四杆机构的类型
速度瞬心法
图解法
◆两构件重合点间的运动关系
第二章 平面机构的运动分析
一、速度瞬心的概念
两个构件的瞬时等速重合点(同速点)
瞬心数
N K ( K 1) 2
构件数—K
二、瞬心位置的确定
1、直接观察法(两构件以运动副相联) 2、利用三心定理求(两构件间没有构成运动副)
三心定理:三个构件的三个瞬心必定在一条直线上
机构的组成原理——任何机构都是由若干个杆组依次联接到
原动件和机架上而构成的
第一章 平面机构的结构分析
3、机构的结构分析
机构的结构分析是指把机构分解为基本杆组、原动件和 机架,是机构组成的反过程,又称为拆杆组。
拆分原则
首先,从远离原动件的部分开始拆分; 试拆时,先试拆低级别杆组;
每拆完一个杆组,剩余的部分仍然是一个完整机构。
第六章 轮系及其设计
找基本周转轮系的一般方法
先找行星轮:
几何轴线绕另一个齿轮的几何轴线转动的齿轮
再找行星架
支持行星轮的构件
找中心轮
几何轴线与行星架的回转轴线重合 直接与行星轮相啮合的齿轮
一个基本周转轮系
行星轮、行星架、中心轮
机械原理第十一十二章

3.棘轮设计的要点
§12-2 槽轮机构
1.槽轮机构的组成及工作特点 (1)机构组成 槽轮机构是由主动拨盘、从动槽 轮和机架等组成。 (2)工作特点 槽轮机构可将主动拨盘的等速回 转运动转变为槽轮时动时停的间歇运 动,并具有结构简单、外形尺寸小、 机械效率高,以及能较平稳的、间歇 地进行转位等优点,但存在柔性冲击 的缺点,故常用于速度不太高的场合。
i
mH
= 1 imn
H
或
i
Hale Waihona Puke nH= 1 inmH
§11-4 复合轮系的传动比
对于复合轮系,既不能将其视为 单一的定轴轮系来计算其传动比,也 不能将其视为单一的周转轮系来计算 其传动比。而唯一正确的方法是将它 所包含的定轴轮系和周转轮系部分分 开,并分别列出其传动比的计算公式, 然后进行联立求解。 因此,复合轮系传动比的计算方 法及步骤可概括为: 1)正确划分轮系; 2)分别列出算式; 3)进行联立求解。
§12-3 擒纵轮机构
1.擒纵轮机构的组成及工作原理 (1)机构的组成 由擒纵轮、擒纵叉、游丝摆轮及机 架组成。 (2)工作原理 擒纵轮受发条驱动而转动,同时受 擒纵叉上的左右卡瓦阻挡而停止,并通 过游丝摆轮系统控制动停时间,从而实 现周期性单性间歇运动。 游丝摆动系统是由游丝、摆轮及圆 销、擒纵叉及叉头钉等组成。其能量的 补充是通过擒纵轮齿顶斜面与卡瓦的短 暂接触传动来实现的。
2.机构的类型及应用 (1)圆柱凸轮式间歇运动机构 常取凸轮槽数为1,柱销数一般取z2≥6,在轻载下间歇频率 为1500次/分。 (2)蜗杆凸轮式间歇运动机构 常取单头螺杆凸轮z2≥6,从动盘按正弦加速度规律设计, 可控制中心距消除间隙,承载能力高,间歇频率为1200次/分, 分度精度为30″。 (3)共轭凸轮式间歇机构 动力特性好,分度精度高,成本较低。
机械原理课后答案第11章
第11章作业11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定?答:参考教材216~218页。
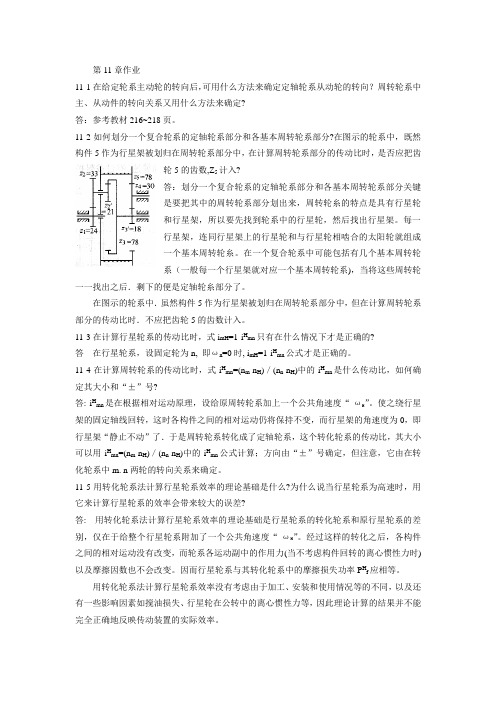
11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的传动比时,是否应把齿轮5的齿数,Z5计入?答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部分关键是要把其中的周转轮系部分划出来,周转轮糸的特点是具有行星轮和行星架,所以要先找到轮系中的行星轮,然后找出行星架。
每一行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成一个基本周转轮糸。
在一个复合轮系中可能包括有几个基本周转轮系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。
在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。
11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的?答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。
11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号?答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。
使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。
11-5用转化轮系法计算行星轮系效率的理论基础是什么?为什么说当行星轮系为高速时,用它来计算行星轮系的效率会带来较大的误差?答: 用转化轮系法计算行星轮系效率的理论基础是行星轮系的转化轮系和原行星轮系的差别,仅在于给整个行星轮系附加了一个公共角速度“-ωH”。
机械原理第十二章 机械的效率
§12-4摩擦在机械中的应 用 机械中的摩擦虽然对机械的工作有许多不利的影响,但在某些情况下也有其
有利的一面。工程实际中不少机械正是利用摩擦来工作的。
常见的应用摩擦的机构除了第七章介绍的外还有以下几种。
12.1.2 螺旋副中的摩擦
螺旋副为一种空间运动副,其接触面是螺旋面。当螺杆和螺母之间受 有轴向
载荷Q时,拧动螺杆或螺母,螺旋面之间将产生摩擦力。
Q
Q
2
2
2
1
F
Q
n R12
2
F αQ n
πd
v21 1
l
d1
(b)
d d2
(a)
螺旋线可以展成平面上的斜直线,如上图(b)所示,这样,就可以把空间问题 转化为平面问题来研究。
当机械出现自锁时,无论驱动力多大,都不能运动,从能量的观点来看,就 是驱动力所做的功永远≤由其引起的摩擦力所做的功。即:
η≤0
上式可以用于判断是否自锁及分析出现自锁条件,但这里η已失去一般效率 的意义。仅表明机械自锁的程度,且η越小表明自锁越可靠。
§12-3提高机械效率的途径
由前面的分析可知,机械运转过程中影响其效率的主要原因为机械中的损耗, 而损耗主要是由摩擦引起的。因此,为提高机械效率比采取措施减小机械中的摩 擦,一般从设计方面、制造方面和使用维护方面考虑。
跑合结束:正压力分布规律为, pρ=常数
由于
R
Q pds 2p(R r)
r
故
p
Q
2 (R r)
代入上面推出来的公式
M f
2fp
R
机械原理知到章节答案智慧树2023年内蒙古农业大学

机械原理知到章节测试答案智慧树2023年最新内蒙古农业大学第一章测试1.机械原理课程的研究对象是什么 ( ) 。
参考答案:机器和机构2.下列关于机器和机构的关系描述中,正确的是 ( ) 。
参考答案:机器包含机构3.脚踏自行车既属于机构的范畴,又属于机器的范畴。
()参考答案:错4.机械是机器和机构的总称。
()参考答案:对5.常见的机构有带传动机构、齿轮传动机构、凸轮机构和连杆机构等。
()参考答案:对6.机构是用来传递与变换运动和力的可动装置。
()参考答案:对7.脚踏缝纫机是一种机器。
()参考答案:错8.机器都是由各种机构组合而成的。
()参考答案:对9.能够用来变换或传递能量的装置是机构。
()参考答案:错10.机械原理课程的研究内容是有关机械的基本理论问题。
()参考答案:对第二章测试1.平面运动副按其接触特性,就可以分成为()。
参考答案:低副与高副2.由机械原理知识可知,电动自行车应属于 ( )参考答案:机器3.两构件通过点或线接触组成的运动副称为 ( )参考答案:高副4.将机构运动简图按实际长度放大一倍绘制,选用的长度比例尺应是 ( )参考答案:0.0005m/mm5.计算机构自由度时,如果没去除局部自由度,那么机构自由度的计算结果将会()参考答案:增大6.构件是机构或机器中独立运动的单元体,也是机械原理研究的对象。
()参考答案:对7.机构具有确定相对运动的条件为:机构自由度>0 ()参考答案:错8.在平面机构中一个低副引入二个约束。
()参考答案:对9.在平面机构中一个高副引入二个约束。
()参考答案:错10.机器中独立运动的单元体,称为零件。
()参考答案:错第三章测试1.一个平面机构,包含机架在内,一共有6个构件,则该机构一共有( )个速度瞬心。
参考答案:152.由N个构件(含机架)组成的机构,它的瞬心总数K的计算表达式是()。
参考答案:N*(N-1)/23.以下关于速度影像法的表述,正确的是()参考答案:速度影像法只适用于构件,不适用于机构。
《机械原理》课件 第12章 其它常用机构
为棘轮的单向间歇运动
当主动件作逆时针方向摆动时,驱动 棘爪便插入棘轮的齿槽中,使棘轮跟 着转过一定角度,此时,制动爪在棘 轮的齿背上滑动。当主动件顺时针方 向转动时,制动爪便阻止棘轮发生顺 时针方向转动,而驱动棘爪却能够在 棘轮齿背上滑过,当主动件作连续的 往复摆动时,棘轮便作单向的间歇运 动。
二、槽轮机构的类型(续) 球面槽轮机构
动画
特点: 主动轮1和拨销3的 轴线均通过球心。
当只有一个拨销时, 动停时间相等;
当对称布置两个拨 销时,可以实现连 续转动。
二、槽论机构应用
一般用于转速不很高的自动机械、轻工机 械或仪器仪表中。 电 影 放 映 机 的 送 片 机 构
动画
12-3 凸轮式间歇运动机构
12-2 槽轮机构
一、槽轮机构的组成及工作特点
动画演示
典型槽轮机构的组成:由主动 拨盘、从动槽轮和机架等组成。
槽轮机构的工作原理:主动拨 盘连续转动,当主动拨盘的圆 销A未进入槽轮径向槽时,槽 轮在锁,静止不动;当主动拨 盘的圆销A进入槽轮径向槽时, 槽轮受圆销A驱动而转动。从 而使槽轮做间歇运动。
一、 万向联轴节机构的组成和应用 万向联轴节
万向联轴节机构用于传递两相交轴间的运动和动力, 广泛用于汽车、机床等机械中;
二、万向联轴节机构的类型
传动过程中,两轴 夹角可以变动,为 变角传动机构。
动画
◆单万向联轴节机构
两轴瞬时角速 比随时变化,并 不恒等于1
单万向联轴节机构两特殊位置的机构运动简图
2' = 1 / cos
本章教学内容
12-1棘轮机构 12-2槽轮机构螺旋机构 12-3凸轮式间歇运动机构 12-4不完全齿轮机构 12-5万向联轴节机构 12-6组合机构
机械原理第11章
图11-4
基本周转轮系1:由轮1、2、4和系杆H组成; 基本周转轮系2:由轮3、2'、2、4和系杆H组成; 基本周转轮系3:由轮1、2、2'、3和系杆H组成。 但在这3个基本周转轮系中,只有2个独立。为求 解方便。应取含有固定轮4的基本周转轮系1和 2进行求解。
3',4,5——平面定轴轮系: ω3 z5 78 13 1 z5 z4 i3′5 = = (−1) =− =− =− ′ ′ ω5 z4 z3 z3 18 3 解得:i15=ω1/ω5=593/21=28.2381。
图11-8
上海海运大学专用
例2 c
例2 对图11-4所示的3K型 周转轮系,求传动比i13 。
上海海运大学专用
例1c
例1 对图11-8所示的电动卷扬机减速器,设已知 各轮齿数;求传动比i15。 解 区分基本轮系:区分成图(b)所示的一个基 本周转轮系和图(c)所示的一个定轴轮系。 1,2,2',3,5(H)——基本周转(差动)轮系:
5 i13 =
zz ω1 −ω5 78×33 143 =− 3 2 =− =− ω3 −ω5 z′ z1 21× 24 28 2
i1H = i
3 1H H 13 2
图11-6
z3 z2 99×101 = 1− i = 1− ((−1) ) = 1− = 10−4 ′ z2 z1 100×100
iH1=10000。
上海海运大学专用
例2 b
例 2 在例1中,若z1=99,其他齿数不变, 求iH1。 z3 z2 99×101 = −0.01 解 i1H = 1− ′ = 1− z2 z1 100×99 iH1= -100。 比较二例可知,轮系中各轮 的实际转向不仅与轮系的 组成有关,而且还与各轮 的齿数有关。应根据计算 结果确定,不能象定轴轮 系那样可以直接判断。
机械原理教程全套课件.pdf
教材与学时安排总学时:48时内容讲授:36时习题讲解:12时20032003第一章绪论第二章机构的组成及其自由度的计算第三章平面机构的速度分析第四章机械的摩擦及机械效率第五章机械的平衡第六章机械的运转及其速度波动的调节第七章平面连杆机构及其设计第八章凸轮机构及其设计第九章齿轮机构及其设计第十章轮系第十一章其他常用机构第十二章机构的选型与组合目录第一章绪论§1-1本课程研究的对象及内容§1-2学习本课程的目的§1-3本课程的特点及学习时注意的几个问题思考题20032003§1-1 本课程研究的对象及内容1.研究对象机构是指一种用来传递与变换运动和力的可动装置。
机器是指一种执行机械运动装置,可用来变换和传递能量、物料和信息。
机械是机构和机器的总称。
机械应用实例机械应用实例仿生机械机车飞机汽车船舶内燃机工件自动装卸装置六自由度关节式工业机器人2003内燃机2003工件自动装卸装置2003六自由度关节式工业机器人控制系统示教板操作机2003蒸汽机车内燃机车电力机车2003汽车是指能自带能源的机动轮式无轨车辆,它是使用最广泛的交通运输工具。
按运输对象汽车可分为客运汽车和货运汽车(简称货车)两大类2003船舶船舶是指能航行或停泊于水域进行运输或作业工具,按不同的使用要求而具有不同的技术性能、装备和结构型式。
船舶在国防、国民经济和海洋开发等方面都占有十分重要的地位。
船舶从史前刳木为舟起,经历了独木舟和木板船时代,1879年世界上第一艘钢船问世后,又开始了以钢船为主的时代。
船舶的推进也由19世纪的依靠人力、畜力和风力(即撑篙、划桨、摇橹、拉纤和风帆)发展到使用机器驱动。
2003飞机2003焊接机器人主要研究:焊接机器人(把弧焊与点焊机器人作为负载不同的一个系列机器人,可兼作弧焊、点焊、搬运、装配、切割作业)产品的标准化、通用化、模块化、系列化设计。
弧焊机器人用激光视觉焊缝跟踪装置的开发:激光发射器的选用,CCD成象系统,视觉图象处理技术,视觉跟踪与机器人协调控制。
机械原理第十二章 滑动轴承
d D
整体轴套
轴瓦(衬 背) 轴承衬
卷制轴套
剖分式轴瓦有厚壁和薄壁轴瓦之分。 厚壁轴瓦是将轴承合金浇注在青铜或钢制瓦背上。
薄壁轴瓦用双金属板连续轧制而成。
为提高轴承合金与轴瓦背的结合强度,防止脱落,常在轴瓦背 表面制出螺纹、凹槽及榫头结构。
厚壁轴瓦
薄壁轴瓦
为防止轴瓦在轴承座中转动,轴瓦端部设置凸缘作轴向定位, 也可用紧定螺钉或销钉将其固定在轴承座上。
二、常用滑动轴承材料 (一)金属材料
(1)轴承合金(巴氏合金或白合金): 嵌入性、顺应和磨合性好,不易胶合。但轴承合金的强度很
低,只能做轴承衬。适用于重载、中高速场合。
青铜: 锡青铜、铅青铜、铝青铜 (2) 铜合金
黄铜
较高的强度、较好的减摩性和耐磨性。应用广泛
锡青铜减摩性和耐磨性最好,用于中速、重载场合;铅青铜抗 粘附能力强,用于高速、重载场合;铝青铜的强度与硬度较高,抗 粘附能力差,用于低速、重载场合。 (3)铝基轴承合金 耐腐蚀性好和疲劳强度较高,减摩性也较好,适用于高速、重载 的场合 (4) 铸铁
第四节 非液体润滑滑动轴承设计
工程上应用较多且较容易实现的是非液体润滑滑动轴承。非 液体润滑滑动轴承的工作能力和使用寿命取决于轴承的减摩性能、 机械强度和边界膜的强度。实践表明,磨损和胶合是滑动轴承的 主要失效形式。
这类滑动轴承可靠的工作条件是:边界膜不破裂,维持粗糙 表面微腔内有液体润滑存在。由于边界膜破裂的因素很复杂,因 此,仍采用简化的条件性计算 。
(三)圆周速度v值验算
v dn [v]
60 1000
式中 n——轴颈的转速(r/min); [v]——轴颈圆周速度的许用值,m/s。
二、推力轴承的计算
机械原理考试知识点

《机械原理》考试知识点第一篇基本机构及常用机构的运动学设计第一章绪论1.了解机械原理的研究对象及主要内容;2.了解机械原理的地位和作用;3.了解机械原理的学习目的和方法。
第二章机构的结构分析与综合1.掌握有关机构的概念,如构件、运动副、运动链、杆组等;2.掌握平面机构运动简图的绘制方法和步骤,能根据实际机械正确绘制机构运动简图;3.掌握机构具有确定运动的条件及平面机构自由度的计算,并注意复合铰链、局部自由度和虚约束等情况;4.掌握平面机构中高副低代的方法,要求代替前后,机构的自由度和机构的瞬时运动不变;5.掌握平面低副机构的结构分析和组成原理,能根据给定的机构运动简图进行拆杆组,进行机构的结构分析,并确定机构的级别。
第三章平面连杆机构及其设计1.了解平面连杆机构的类型、应用及其主要特点;2.掌握平面连杆机构特别是它的基本形式——平面铰链四杆机构的一些基本概念和基本知识及其演化方法和应用;3.掌握平面连杆机构的运动特性和传力特性:如有曲柄的条件、急回特性和行程速度变化系数、压力角与传动角、死点位置、运动连续性等;4.掌握等视角定理及几何法刚体导引机构的设计;5.掌握机构的刚化反转法及几何法函数生成机构的设计;6.掌握急回机构的设计;7.掌握用速度瞬心法作平面机构的速度分析方法;8.掌握用相对运动图解法进行机构的运动分析方法;9.掌握用复数矢量法进行机构的运动分析的方法。
第四章凸轮机构及其设计1.掌握凸轮机构的基本概念、凸轮机构的分类及应用;2.掌握从动件常用的运动规律及从动件运动规律的设计原则;3.掌握凸轮机构的反转法原理;4.掌握图解法设计平面凸轮轮廓曲线的设计方法;5.掌握解析法设计平面凸轮轮廓曲线的设计方法;6.掌握凸轮机构的压力角及基本尺寸的设计。
第五章齿轮机构及其设计1.了解齿轮机构的类型和应用;2.掌握齿廓啮合基本定律;3.掌握渐开线的形成及其性质;4.掌握渐开线标准直齿圆柱齿轮的基本参数和几何尺寸计算;5.掌握渐开线直齿圆柱齿轮的啮合传动特点,包括:1)定传动比;2)啮合线与啮合角;3)中心距的可分性;3)正确啮合条件;4)连续传动条件;5)标准中心距和安装中心距;6)无侧隙啮合条件等。
机械原理 第十一章

z3 z2 z2 z1
z3 z2 z2 z1 48
齿轮 1—2—2‘—3、组成周转轮系
H i13
z z n1 nH 48 48 3 2 n3 nH z1 z 2 20 20 n1 nH n 48 48 1 1 0 nH nH 20 20
齿轮 1—2 与齿轮 1‘—4‘、组成定轴轮系,
i12 n1 z 1 n2 z2
i1 4
n1 z 1 n 4 z 4
n2 n1 (
n4 n1 (
z2 40 ) n1 ( ) 2n1 z1 20
z4 20 ) n1 ( ) n1 / 2 z1 40
1 什么是惰轮? 2 惰轮在轮系中起什么作用? 3 在定轴轮系中,如何来确定首、末两轮转向间的关系? 4 什么叫周转轮系的"转化机构"? 5 周转轮系的"转化机构"在计算周转轮系传动比中起什么作用? 6 在差动轮系中,若已知两个基本构件的转向,如何确定第三个基本 构件的转向? 7 周转轮系中两轮传动比的正负号与该周转轮系转化机构中两轮传动 比的正负号相同吗?为什么? 8 如何从复杂的混合轮系中划分出各个基本轮系? 9 计算混合轮系传动比的基本思路是什么?能否通过给整个轮系加 上一个公共的角速度(–ω)的方法来计算整个轮系的传动比? 10 周转轮系中各轮齿数的确定需要满足哪些条件? 11 在图示轮系中, 单头右旋蜗杆 1 的回 转方向如图,各轮齿数分别为 Z2=37, Z2′=15,Z3=25, Z3′=20,Z4=60, 蜗杆 1 的转速 n1=1450r/min, 方向如图。 试求轴 B 的转速 nH 的大小和方向。 解(1)蜗杆 1 与蜗轮 2 组成定轴轮系, i12=Z2 n1 /Z1=1×1500/37=39.189 n2 方向关系如图尖头所示。 设 n2 为 正 (2)其余部分组成以 2‘和 4 为中心轮, 3—3‘为行星轮,2 为系杆的行星轮系。 对整个行星轮系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
周转轮系的传动比(2/2)
ω ω i =ω =ω ω ω
H m H n H m系中由m至n各从动轮齿数的乘积 在转化轮系中由m至n各主动轮齿数的乘积
式中“±”号应根据其转化轮系中m、n两轮的转向关系来确定。 而ωm、ωn、ωH均为代数值,在使用时要带有相应的“±”号。 而差动轮系的传动比就可根据已确定出的ωm、ωn、ωH大小直 接求得。 3.行星轮系的传动比 由于具有固定太阳轮的周转轮系必定为行星轮系,故行星轮 系传动比的一般表达式为
第十一章
§11-1 §11-2 §11-3 §11-4 §11-5 §11-6 §11-7 *§11-8
齿轮系及其设计
齿轮系及其分类 定轴轮系的传动比 周转轮系的传动比 复合轮系的传动比 轮系的功用 行星轮系的效率 行星轮系的类型选择及设计的基本知识 其他新型行星齿轮传动简介 返回
§11-1 齿轮系及其分类
§12-4 凸轮式间歇运动机构
1.机构的工作原理及特点 (1)工作原理 由主动轮和从动盘组成,主动凸轮作连续转动,通过其凸轮 廓线推动从动盘作预期的间歇分度运动。 (2)工作特点 动载荷小,无刚性和柔性冲击,适合高速运转,无需定位装 置,定位精度高,结构紧凑; 但加工成本高,装配与调整的要求。
凸轮式间歇运动机构(2/2)
§12-3 擒纵轮机构
1.擒纵轮机构的组成及工作原理 (1)机构的组成 由擒纵轮、擒纵叉、游丝摆轮及机 架组成。 (2)工作原理 擒纵轮受发条驱动而转动,同时受 擒纵叉上的左右卡瓦阻挡而停止,并通 过游丝摆轮系统控制动停时间,从而实 现周期性单性间歇运动。 游丝摆动系统是由游丝、摆轮及圆 销、擒纵叉及叉头钉等组成。其能量的 补充是通过擒纵轮齿顶斜面与卡瓦的短 暂接触传动来实现的。
3.棘轮设计的要点
§12-2 槽轮机构
1.槽轮机构的组成及工作特点 (1)机构组成 槽轮机构是由主动拨盘、从动槽 轮和机架等组成。 (2)工作特点 槽轮机构可将主动拨盘的等速回 转运动转变为槽轮时动时停的间歇运 动,并具有结构简单、外形尺寸小、 机械效率高,以及能较平稳的、间歇 地进行转位等优点,但存在柔性冲击 的缺点,故常用于速度不太高的场合。
槽轮机构(5/5)
(2)普通槽轮机构的运动特性 槽轮机构的角速度及角加速度的最大值随槽轮数 z 的增多 而减少; 当圆销开始进入和离开径向槽时,此两瞬时有柔性冲击, 且随槽数 z 的减少而增大; 在机构运转速度较高时,或槽轮轴承惯性较大的情况下, 就显得更为突出。 内槽轮机构与外槽轮机构一样,有加速度突变,且其值与 外槽轮者相等,但当|α|→0 时,角加速度值迅速下降并趋于 零。
2.机构的类型及应用 (1)圆柱凸轮式间歇运动机构 常取凸轮槽数为1,柱销数一般取z2≥6,在轻载下间歇频率 为1500次/分。 (2)蜗杆凸轮式间歇运动机构 常取单头螺杆凸轮z2≥6,从动盘按正弦加速度规律设计, 可控制中心距消除间隙,承载能力高,间歇频率为1200次/分, 分度精度为30″。 (3)共轭凸轮式间歇机构 动力特性好,分度精度高,成本较低。
棘轮机构(2/3)
2.棘轮机构的类型及应用 (1)棘轮机构的类型 外接式 普遍棘轮机构 内接式 棘条 钩头式 直推式 翻转式 提转式
1)齿啮式棘轮机构
双动式棘轮机构 可变向棘轮机构 外接摩擦式 内接摩擦式 滚子内接摩擦式
2)摩擦式棘轮机构
棘轮机构(3/3)
(2)棘轮机构的应用 例 牛头刨床工作台的进给机构
汽车后轮中的传动机构
第十二章
其他常用机构
§12-1 棘轮机构 §12-2 槽轮机构 §12-3 擒纵轮机构 §12-4 凸轮式间歇运动机构 §12-5 不完全齿轮机构 *§12-6 非圆柱齿轮机构 §12-7 螺旋机构 §12-8 万向铰链机构 §12-9 组合机构 §12-10 含有某些特殊元器件的机构 返回
行星轮系的类型选择及设计的基本知识(2/2)
2.行星轮系各轮齿数的确定 (1)单排行星轮系的配齿调节 ① 满足传动比要求 ② 满足同心条件
z3/z1=i1H-1 z3=z1+2z2 (z1+z2)sin(180 /k)>z2+2hm*
③ 满足均布安装条件 (z1+z3)/k=N ④ 满足邻接条件
(2)双排行星轮系的配齿条件 3.行星轮系的均 装置
H
设轮1为主动轮,其转矩为M1, 则轮1所传递的功率为 P1=M1ω1 而在转化轮系所传递的功率为 P =M1(ω1-ωH)=P1(1-iH1) (d)
H 1
2 H
(c)
1 3
行星轮系的效率(3/4)
当M1与(ω1-ωH)同号时,则P1H>0,表明轮1在转化轮系中为 主动; 反之,则为从动。 在这两种情况下,Pf值相差不大, 故 可简化为均按主动计算,并去Pf的绝对值, PfH=|P1H|(1-η1nH)=|P1(1-iH1)|(1-η1n)H
4.实现换向传动 例 车床走刀丝杆的三星轮换向机构 5.实现运动合成与分解 6.实现大功率传动
§11-6 行星轮系的效率
行星轮系主要应用于动力传动,需进行效率分析。 1.机械效率的一般计算式 设一机械的输入功率为Pd、输出功率为Pr和摩擦功率为Pf, 则机械的效率的计算式为:
或
= Pr /(Pr + Pf ) = 1 /(1 + P f / P r ) = (Pd Pf ) / Pd = 1 Pf / Pd
§11-7 行星轮系的类型选择及设计的基本知识
1.行星轮系的类型选择 行星轮系的类型很多,在相同的条件下,采用不同的类型, 可以使轮系的外廓尺寸、重量和效率相差很多。因此,在设计 行星轮系时,应重视轮系类型的选择。其选择原则为: 首先,应满足传动的范围; 例 2K-H型行星轮系的传动比范围 其次,应考虑传动效率的高低。 动力传动应采用负号机构; 当要求有较大传动比时,可采用几个负号机构或与定轴轮系的复 合或3K型轮系。 第三,应该注意轮系中的功率流动问题。 此外,还应考虑轮系的外廓尺寸、重量等要求。
槽轮机构(4/5)
因k≤1,则有 n≤2z/(z-2) 由此可知,槽数与圆销数间的关系 z=3,n=1~6; z=4,n=1~4; z=5、6,n=1~3; Z≥7 n 1 2 Z≥7,n=1~2。 2)内擦轮机构 其单销内槽轮机构的运动系数为 k= 2α1/(2π)=(π+2φ2)/(2π) =(π+2π/z)/(2π) =1/2+1/z 故k>0.5。
η1H=|P1|/(|P1|+Pf)=1/[1+|1-iH1|(1-η1n)H]
行星轮系的效率(4/4)
结论
当η1nH一定时,行星轮系的效率就是其传动比的函数。
例 行星轮系的效率曲线 上面对轮系效率的计算问题进行 初步的讨论,由于 、 安装和使用情况等的不同,以及还有一 影响效率的因素(如搅 油损失、行星轮在公转中的离心惯 力等)没有考虑,致使理论 计算的结果并不能 正确 反映传动装置的实 效率。所以, 如有必要应在行星轮系 成之后,用实验的方法进行效率的测定。
定轴轮系的传动比(2/2)
2.首、末轮转向关系的确定 定轴轮系的首、末两轮的转向关系,一般用标注箭头的方法 来确定。 过轮或中介轮 轮系中不影响轮系的传动比的大小,而仅起中 间过渡改变从动轮转向作用的齿轮。
§11-3 周转轮系的传动比
先来观察和比较一下周转轮系和定轴轮系。 因此,周转轮系的传动比就不能直接按定轴轮系传动比的求法来 计算。 1.周转轮系的转化轮系 根据相对运动原理,若给定某个周转轮系一个-ωH的反转运 动之后,所转化得到的定轴轮系,就称为原周转轮系的转化轮系 或转化机构。因此,周转轮系的传动比就可以通过对其转化轮系 传动比的计算来进行求解的。 2.差动轮系的传动比 设差动轮系中的两个太阳轮分别为m和n,行星轮架H,则其 转化轮系的传动比为:
§11-2 定轴轮系的传动比
所谓定轴轮系的传动比,是指轮系中首、末两构件的角速度 之比。 轮系的传动比包括传动比的大小和首末两构件的转向关系两 方面内容。 1.传动比大小的计算 定轴轮系的传动比等于组成该轮系的各对啮合齿轮传动比的 连乘积;也等于各对啮合齿轮中所有从动轮齿数的连乘积与所有 主动轮齿数的连乘积之比,即 定轴轮系的传动比 = 所有从动轮齿数的连乘积 所有主动轮齿数的连乘积
擒纵轮机构(2/3)
2.擒纵轮机构的类型及应用 擒纵轮机构有以下两大类: (1)有固有振动系统型擒纵轮机构 如机械手表中的擒纵轮机构。因游丝摆轮系统振动频率固定, 故可用于计量时间,常用于钟表中。 (2)无固有振动系统型擒纵轮机构 此种擒纵轮仅由擒纵轮和擒纵叉组成。
擒纵轮机构(3/3)
擒纵叉往复振动的周期与擒纵叉转动惯量(为常数)的平 方成正比。与擒纵轮给擒纵叉的转矩大小(基本稳定)的平方 根成反比。故此机构能使擒纵轮作平均转速基本恒定的间歇运 动。 这种机构结构简单,便于制造,价格低,但振动周期不很 稳定,故主要用于计时精度要求不高、工作时间较短的场合。
(a) (b)
对于一个具体机械,因Pd、Pr一般为已知,故计算的关键是 要求出Pf值。
行星轮系的效率(2/4)
2.轮系中的摩擦损失功率Pf的确定 各运动副中的作用力 Pf主要取决于轮系中 运动副元素间的摩擦系数 相对运动速度的大小 因行星轮系与其转化轮系中上述各因素均不改变,故他们的 摩擦损失功率应相等,即Pf=PfH
§12-1 棘轮机构
1.棘轮机构的组成及工作特点 (1)机构组成 棘轮机构 是由摇杆、棘爪、棘轮、 止动爪等组成。 (2)工作特点 可实现单向间歇运动、机构简单、 制造方便、运动可靠、棘轮转角可调; 但冲击和噪声大、运动精度低,适用 于低速轻载的场合。 棘轮转角大小的调节方法: 改变主动摇杆摆角的大小 加装一棘轮罩以遮盖部分棘齿
槽轮机构(2/5)
2.槽轮机构的类型及应用 (1)槽轮机构的类型 外槽轮机构 普通型 内槽轮机构 槽条机构 不等臂多销槽轮机构 球面槽轮机构 偏置外槽轮机构 特殊型 偏置式槽轮机构 偏置内槽轮机构 曲线外槽轮机构 曲线式槽轮机构 曲线内槽轮机构 (2)槽轮机构的应用 例1 蜂窝煤制机模盘转位机构 例2 电影胶片抓片机构