No-Jerk Skyhook Control Methods for Semiactive Suspensions
DL701火力发电厂热工自动化术语
☿থϹॖ⛁ᎹႮࡼ࣪ᴃ᪱DL/T701-1999থᜬᯊⒸ:2002-1-15Ё ढҎ ⇥ ݅ Ϲ ᜐ Ϯ ᷛ ޚথϹॖThermopower automation-vocabularyfor fossil fired power plant2000-02-24থᏗ2000-07-01ЁढҎ⇥݅ᆊথᏗࠡᣄϹᎹϮᾬ[1995]44ϹᜐϮᷛޚᩥՈᅝՈDŽˈ៥☿থϹॖՈৡDŽϵՈᆊˈּՈৡˈˈᕜDŽЎ┉ǃݙՈѸˈᔶՈᩨˊˈේᷛޚDŽᷛޚՈЁ“Ҿᜬ”ՈᾬGB/T13983-92GB/T13283-91ՈᴵDŽ ᷛޚՈ┈AՈ┈DŽᷛޚϵϹᎹϮᾬᷛޚ࣪DŽ ᷛޚ᰻˖ЁϹᴎЁᖗDŽ ҎDŽ ϹᎹϮᾬᷛޚ࣪DŽֲࠡ ᇇᓩϬᷛޚᴀᴃ☿থϬᴃ┈$˄ᦤ߾Ո┈˅ ᆵᴀᷛޚᢈথϬՈᴃˈৃᩥǃᅝǃˊᮍՈ᭛ӊϬ᪱DŽϟ߫ޚ᠔Ոᴵ᭛ˈỞᴀᷛޚЁϬ໐ᵘ៤ᴀᷛޚՈᴵ᭛DŽᴀޚߎČᯊˈ᠔߾ČᴀഛDŽ᠔ޚ῁ˈՓϬᴀᷛޚՈϬϟ߫ޚ᳔ᴀՈৃDŽ*ˋ7 ü Ꮉ⌟ₓࠊϬẔ⌟Ҿᜬᰒ߾Ҿᜬஂܲᑺ൫ *ˋ7 ü Ҿ఼Ҿᜬᴀᴃˊ Ⴎ D₋ϬẔ⌟ϢࠊிඣˈᇍϣˈҹҷՈᮑDŽᇍ☿থˈᰃϣথࠊՈᘏDŽϔѯĀҾᜬϢࠊā Lˈ , DŽˊ ˊ ⛁ D₋ϬẔ⌟Ϣࠊிඣᇍ☿থՈ⛁ϣˈҹҷՈᮑDŽˊ ˊ Ϲ H D₋ϬẔ⌟Ϣࠊிඣᇍ☿থՈথˈҹҷՈᮑѠ V GD DŽˊ ˊ ẋ S D₋ϬẔ⌟ϢࠊிඣᇍϣˈҹҷՈᮑDŽ ˊ ˊ ܼ Z S Dᭈਃࡼǃ᫇ǃذᴎϢˊঞՈₑਃࡼ᪡ˊ ˊ ֕ PᢆඣঞՈẔখ᭄ঞˈҹܲখ᭄źˈẔߎϡখ᭄źDŽЏ⌟ₓிඣՈϔϾবₓᑊᇚᝯ⌟ؐϢؐՈDŽˊ ˊ ֕ VᇍϣՈ֕ࠊDŽ◄ᯊˈẜࣙՈᅝᡸ᪡DŽ ˊ ˊ ▊ඣF G P V▊ඣϵ఼ǃবễ఼ঞᩥਜ਼ᴎϢՈඈ៤ˈᰃϔⒸᭈՈ᠔Ոখ᭄▊ࠊ֜ ৄ ϞՈҾᜬ& খᢅ ˊ ˊ ˊ Ϟ߾ˈҹ֓ؐʱˊᇍϣࠊDŽˊ ˊ ிඣᎹ HிඣᎹඣՈֲՈˈ໐ᇍிඣᇍᬥᵘ៤ǃඈᵘǃǃࠊᴎᵘẟ᪂ᩥՈDŽϔՈࠊᇍᬥඣˈϬᑊՈඈ៤ՈՈ᳝ᴎᭈDŽ໐ඣᴀẜᰃՈϔϾඣՈඈ៤DŽˊ ⌟ₓϢᜬ P D G Lˊ ˊ ⌟ₓ PҹܲₓؐЎՈՈ᪡DŽˊ ˊ >⌟Ո@ₓ >@TৃᅮₓܲՈϔᬥˈЎՈˊ ˊ >ₓ@ؐ Y > D @ϬϔϾ᭄ϔϾᔧՈ⌟ₓᜬ߾Ոₓˈབ Pǃ ǃϔ DŽ ˊ ˊ বₓ Y݊ؐৃব⌟ߎՈₓźDŽˊ ˊ বₓ L Y఼ҾᜬՈবₓDŽˊ ˊ ߎবₓ R Yϵ఼ҾᜬߎՈবₓDŽˊ ˊ ᝯ⌟বₓ P G Y⌟ₓՈবₓDŽᝯ⌟বₓỞ⏽ᑺǃǃₓǃᑺDŽ ˊ ˊ ᝯ⌟ؐ P G YᢈᴵӊՈⒸˈϵ⌟ₓញՈˈᑊҹ᭄ؐ⌟ₓᜬ߾Ոₓؐˊ ˊ >఼ҾᜬՈ@߾ؐ L GL> D P L@ Ҿ఼Ҿᜬ᠔Ոᝯ⌟ₓՈؐDŽˊ ˊ >ₓؐ@ףؐ W Y> D @ᜬ߾ℷₓᯊ᠔ᴵӊϟՈₓՈؐDŽ⊼˖ₓՈףؐᰃϔϾˊˈϔޚܲՈˈỞϬףؐᴹףؐDŽˊ ˊ >ₓՈ@൪ףؐ F W Y > D @ ЎϔᅮՈৃҹҷףؐՈₓؐDŽ⊼˖ ˊϔˈףؐᝯףؐՈˈᇍѢϔᅮՈϬˈؐৃᩥDŽˊϔϾₓՈĀףؐāˈϔϬՈஂܲᑺՈҾᜬᮍDŽˊ ˊ Hᝯ⌟বₓՈᝯ⌟ؐף᭄ؐDŽ⊼˖ ˊᔧ⌟ؐףؐᯊˈ˙⌟ؐϔףؐDŽˊᔧᜬញՈ᭄ߎᯊˈᖙᜬញՈޚDŽˊ ˊ ߾ؐ H R L GL ҾᜬՈ߾ؐ⌟ₓՈ ףؐDŽ ˊ ˊ ᓩϬ GX HҾᜬՈ߾ؐҹᢈؐˈᑊҹ᭄ᜬ߾DŽˊ ˊ ᇍ HҾᜬՈ߾ؐҹᝯ⌟ₓՈ ףؐˈᑊҹ᭄ᜬ߾DŽˊ ˊ ᴀ L Hখ↨ᴵӊϟҾᜬՈ߾ؐDŽˊ ˊ ޚ ஂ ܲᑺ DҾᜬ߾ؐϢ⌟ₓ ףؐՈϔᑺDŽˊ ˊ ޚ ஂ ܲᑺ൫ D FҾᜬޚ ஂ ܲᑺՈ൫DŽˊ ˊ VᢈՈᎹᴵӊϟˈҾᜬញᢈᯊⒸݙবՈ࿁DŽ ˊ ˊ Ẕ⌟Ҿᜬ P L⌟ₓՈҾᜬDŽҹᰃবễ఼ǃӴ఼Ⴎߎӊᰒ߾ញՈҾᜬDŽˊ ˊ Ẕߎӊ VˈGH GHߎ఼ˈ᳝ᯊӊDŽָ⌟বₓˈᑊᇚḰᤶ⌟ₓՈՈӊ఼ӊDŽবₓẔߎӊߎⒸՈ݇ՈˈϡবDŽ ˊ ˊ Ӵ఼ W GXᛳ⌟ₓˈᑊϔᅮᇚ݊ḰᤶՈߎₓՈҾᜬDŽ ᳝ՈӴ఼ˈˊɴᬥՈᗻՈˈབ˖⏽ᑺӴ఼ˈǃᑺǃᑺǃᑺӴ఼ˈₑₓǃǃ఼ˈ఼DŽˊ ˊ বễ఼ WߎᷛޚՈӴ఼DŽবễ఼ৃˈབ˖⏽ᑺবễ఼ǃবễ఼ǃবễ఼ǃₓবễ఼ǃবễ఼ǃবễ఼ǃবễ఼ǃḰợবễ఼ǃϹবễ఼ǃবễ఼DŽˊ ˊ বễ఼V Wញᖂˊ఼Ոবễ఼ˈৃᇍ⌟ₓؐẟ᭄ˊ ࣙ ˈߎޚᢳˋ᭄ˈႮՈবễ఼DŽ ˊ ˊ ᩥ ᜬ P⌟ₓ߾ᝯ⌟ؐՈញDŽϔϬ᭄߾খ᭄ؐՈࢴĀᜬāDŽ ᩥ ᜬ Ϭˈབ⌕ₓᩥǃ⏽ᑺᩥǃᜬDŽ ˊ ˊ ᰒ߾ҾᜬGL Lᰒ߾ ߾ǃ ᝯ⌟ₓؐՈҾᜬDŽˊ ˊ ߾Ҿᜬ L GLˈL GL L߾ᝯ⌟ₓؐ݊݇ؐՈᰒ߾ҾᜬDŽˊ ˊ ᜬ U GHˈU GL L⌟ₓؐ݊݇ؐՈᰒ߾ҾᜬDŽˊ ˊ ᜬ L LᯊⒸˈ῁߾ϔᢈᯊⒸࠄ᭄ᯊⒸՈᝯ⌟বₓᩥؐՈᰒ߾ҾᜬDŽˊ ࠊ FᇍϣՈ᪂ ǃǃϹᴎǃϹࠊӊ ẟՈ ᓔǃ݇ǃਃǃذ DŽˊ ˊ ႮࠊD FⒸࠊӊՈࠊDŽˊ ˊ ࠊ P Fϵᴎᴎᵘ݊ࠊӊՈࠊDŽ ˊ ˊ ᓔɳࠊ R O FߎবₓϡᴀࠊϬՈࠊDŽᢳᓔɳࠊˈẜ᳝ࠊ݊DŽˊ ˊ ࠊ ࠊ F G O FࠊϬবₓՈࠊDŽˊ ˊ ᅮؐࠊ F Z G VüSࠊDŽՓবₓֱᴀՈࠊDŽˊ ˊ বᅮؐࠊF Z Y VüSՓবₓՈᅮؐব࣪ՈࠊDŽˊ ˊ ࠡࠊ G G FᇚϔϾᇍᝯবₓՈźՈḰᤶҹՈ┈ϬՈࠊDŽ ࠊϬՓবₓϢؐՈDŽℸϬৃᮑᓔɳࠊϞDŽˊ ˊ ൫ࠊ F GH FЏࠊ఼ՈߎবₓᰃϔϾࠊ఼Ոখ↨বₓՈࠊDŽ ˊ ˊ ࠊ WüS FՈব࣪ˈߎᓔ݇ϸՈࠊDŽ ˊ ˊ எࠊ FᇚՈஂܲₓḰஎₓˈஎˊˈߎஂܲₓՈࠊDŽˊ ˊ Ⴎࠊ D GD F₋ϬႮՈᮍবࠊᢈ ᪂খ᭄ˈҹࠊிඣᗻՈࠊDŽˊ ˊ ᳔ࠊ R FᢈՈᑺϟˈՓՈࠊDŽˊ ˊ Ⴎࠊ VüW FᇍẋՈᔧՈ᳔ՈᗻˈႮࠊ఼ᭈখ᭄ՈࠊDŽˊ ˊ ࠊ O FỞᓔ݇ₓᓔ݇ₓߎՈࠊDŽˊ ˊ ࠊ V FϔϔிՈࠊDŽˊ ˊ ᭄ָࠊ GL GL F ''Ϭᩥਜ਼ᴎҷࠊ఼ঞࠊញˈָᇍϣՈࠊDŽ᭄ָࠊᰃᩥਜ਼ᴎࠊՈ ϔˈϔ൫ᩥਜ਼ᴎࠊிඣՈϔ൫ˈϬᖂൟᩥਜ਼ᴎᖂˊ఼ᴹ˗ᩥ ਜ਼ᴎᩥਜ਼᪂ඣՈؐDŽˊ ˊ Ⴎࠊிඣ D F Vϵᇍᬥࠊញᵘ៤Ոˈ࿁ᇍᝯᇍᬥՈᎹࠊՈிඣDŽࠊញᝯ ᇍᬥПⒸՈϬᵘ៤ࠊிඣՈẔDŽϔϬ᭄ े᭄ൟ ˈϬᩥਜ਼ᴎ ᭄ᴎঞᢳᴎ ẟ᭄ᢳˈᇚᩥਜ਼ᴎϢᢳDŽˊ ˊ ࠊிඣ F F VₓᰃₓǃߎₓгₓՈࠊிඣDŽඣЁˈϡӊˈඈ៤ӊ Ոߎₓ῁ₓՈ᭄DŽˊ ˊ ࠊிඣ GL F Vₓᰃₓₓˈ໐ߎₓᰃₓՈࠊிඣDŽிඣЁӊˈϔ ࠊிඣ ఼ࣙ ࠊிඣ ࣙӊ DŽˊ ˊ ᴎᵘ DˈD HᇚࠊবЎՈᴎᵘDŽָˈՈࡼ Ϲ⇨ᴎᵘDŽˊ ˊ ᫇ᴎᵘ U Hϵᴎᵘব᪡বₓՈᴎᵘˈབࠊǃDŽ ˊ ˊ ࠊ F YDŽ ϵࠊᴎᵘ᫇ՈˈҹবₓՈ᫇ᴎᵘDŽˊ ᩥਜ਼ᴎிඣF Vˊ ˊ ϔ J Yˊ ˊ ˊ Ϲᩥਜ਼ᴎ H F࿁ₓẔՈϹDŽᑓϬѢᩥਜ਼ǃ᭄ˊႮࠊᮍDŽỞ఼ǃࠊ఼ǃ఼ঞߎᰒ߾᪂ඈ៤DŽˊ ˊ ˊ ᭄ᩥਜ਼ᴎ GL F₋Ϭᜬ߾᭄ˈϬਜ਼ᇍ᭄ՈϹᩥᴎDŽỞ఼ǃࠊញǃݙᄬ఼ඈ៤DŽˊ ˊ ˊ ᖂˊ఼ P₋ϬࠊՈЁˊ & ˈᖂ>ൟ@ᩥਜ਼ᴎՈӊˈᅠࠊDŽˊ ˊ ˊ ᖂ>ൟ@ᩥਜ਼ᴎ PҹՈᩥਜ਼ᴎDŽҹᖂˊ఼ЎˈҹՈ఼ǃߎ݊ᵘ៤ՈDŽˊ ˊ ˊ ᖂ>ൟ@ᩥਜ਼ᴎ V G PᴎDŽϔࠊϹᖂ>ൟ@ᩥਜ਼ᴎӊՈᩥਜ਼ᴎDŽϔ֜ˈᑊ᭄߾఼ҹᰒ߾᭄࣏DŽˊ ˊ ˊ Ꮉࠊᴎ S FՈᢳ ᭄᭄Ո࿁ˈᑊ ᭄ࠊˈҹᅲࠊ ֕Ո᭄ᩥਜ਼ᴎDŽՈ˖ǃᡫᑆᡄᔎˈ࿁ˈᯊࠊՈᡅˈ᳝Ոẋབ˖ᢳₓǃᓔ݇ₓǃ᭄ₓǃₓǃ᭄ₓߎǃᓔ݇ₓߎঞüᴎỞDŽ ˊ ˊ ˊ ӊ P GXඈញՈӊӊˈϔҹඈՈᷛޚՈӊDŽ ˊ ˊ ˊ ᭄ GD᳝˖D Ϭᜬ߾ǃˈҹႮǃḰᤶ໘ˊDŽǃՈϔႮǃ໘ˊՈՈᜬ߾DŽˊ ˊ ˊ L᭄ˊЁˈҹϔᅮՈ᭄ՈDŽˊ ˊ ˊ LϵǃՈDŽᩥਜ਼ᴎЁˈՈӊ ࣙᩥਜ਼ᴎⒸǃᩥਜ਼ᴎᩥਜ਼ᴎⒸҹঞᩥਜ਼ᴎϢඣⒸՈ ˈՈᩥਜ਼ᴎ࣏Ո఼఼ՈϔᾬDŽˊ ˊ ˊ ᘏඃᡞ ࿁ₓ ՈഄՈỞDŽӊⒸՈඃˈᰃ᭄Ոϔ᭄ՈϔՈᘏDŽ ˊ ˊ ˊ ᭄ GD Kϔᴵ᭄ඃՈঝⒸӴՈᘏDŽˊ ˊ ˊ ᭄ GD QϔϾ᭄ϔϾ᭄ⒸӴՈDŽϔϾ᭄ҹϔϾ᭄ˈՈϡՈ៤DŽ᭄᭄Ոঝݙඈ៤DŽˊ ˊ ˊ O D Q $ϔϬˈ᳝ݙϬѢ᭄ঝⒸẟ᭄Ո᭄DŽˊ ˊ ˊ ᭄ GDᩥਜ਼ᴎˊՈ༘݇Ո᭄Ո▊DŽϔϾ᭄ՈϔᾬܼˈᑊϔϾඈ៤DŽˊ ˊ ˊ ҎᴎỞ PüP FᴎᇍDŽᰃᩥਜ਼ᴎ᭄˗ᩥਜ਼ᴎỞ߾ញᇚ໘ˊࠊ߾ߎᴹDŽЎᴎỞˈᑨࠊǃՈӊDŽˊ ˊ ˊ X Wࢴᴎ P L DŽỞϬϬᴹᩥਜ਼ᴎிඣẟՈǃߎ᪂DŽབ˖ᴎǃ֜Ոᰒ߾఼ǃՈ߾఼DŽˊ ˊ ˊ LˈV₋Ϭᖂˊ఼ˈϵݙࠊՈǃ᭄ϔᅮᩥਜ਼ՈDŽ ˊ ˊ ˊ ᓔඣ R Vޚẟˈ࿁ᩥਜ਼ᴎிඣՈϔᩥਜ਼ᴎிඣDŽ ˊ ˊ ˊ ӊ Vᩥਜ਼ᴎՈிඣ࣏ǃϬ࣏ǃ᪡ඣঞ᭄ˊࠊ᳝݇ՈᴀᘏDŽˊ ˊ ˊ ӊ V V࣏ࠊẋˈࣙᩥǃẔǃϬՈᎹDŽབࠊՈ᪡ඣ᪱ˊிඣDŽˊ ˊ ˊ ᑨϬӊ D VЎϬϬՈӊˈབ᭄ˊǃࠊᑨϬӊDŽ ˊ ˊ ˊ ӊ K GZᩥਜ਼ᴎிඣЁՈᘏDŽབǃӊǃߎỞǃ఼DŽ ˊ ˊ ˊ ӊᅠՈഫ఼ӊDŽ খᢅ ˊ ˊ ˊ ᴵˊ ˊ V D G GLˊ ˊ ˊ VϔϾখ᭄ᜬ߾ՈϔϾবₓՈՈˊবₓDŽখ᭄ࢴՈĀখ᭄āDŽˊ ˊ ˊ ᭄GL Vখ᭄ᜬɴϬ᭄ᜬ߾ՈϔඈؐЁՈDŽˊ ˊ ˊ ᢳ D Vখ᭄ᜬɴݙؐՈDŽˊ ˊ ˊ GLᩥਜ਼ᴎிඣЁˈЎᇍϣՈ֕᪡ˈ߾఼ খᢅ ˊ ˊ ˊ ϞՈ ߾DŽˊ ˊ ˊ ᘏ R GLᜬ߾ᝯᇍᬥ᪂ǃখ᭄ࠊிඣՈDŽ ˊ ˊ ˊ ẋ S GLᜬ߾ϔᝯᇍᬥՈϣǃ᪂খ᭄ՈDŽˊ ˊ ˊ ࠊ F G Lᜬ߾ẋবₓՈ⌟ؐǃ᪂ؐǃؐǃߎؐᭈখ᭄ҹঞՈϔDŽˊ ˊ ˊ ᨪϿ D GLࠊߎՈẋᨪՈˈҹϡՈϡՈ߾ᨪՈϔDŽỞ ˈ᪡ҹᮍϔϾϔᨪDŽˊ ˊ ˊ ᅲᯊ UüW W G GLϔᅮՈ₋ᯊⒸ བ ˈᇚϔᯊⒸⒸ བ ݙখ᭄Ո᭄ˈ఼Ёˈ ᑊҹඃ߾ՈϔDŽˊ ˊ ˊ K W G GLϔᅮՈ₋ᯊⒸ བ P ˈᇍϡՈখ᭄ẟᯊⒸ བ G ₋఼Ёˈ◄ ᡅᯊˈৃҹ᫇ߎᯊⒸݙՈ᭄ˈҹඃ߾ՈϔDŽˊ ˊ ˊ ႮᨪϿ V GL D GLᇍẋࠊঝǃ᪡ঝǃỞẟˈᔧᯊᰒ߾݊ՈϔDŽˊ ˊ ˊ F GLҹᜬ߾ϔඈখ᭄ བᴎ⏽ᑺ ՈDŽˊ ˊ ˊ ᓔ GL Z GRᇚՈϔ߾ˈҹ֓ՈDŽ ˊ ˊ ˋߎ LˋR ,ˋˊ ˊ ˊ ᭄ₓ GL L ',ϡՈ᭄ₓˈгᓔ݇ₓ RüR L DŽˊ ˊ ˊ ᢳₓ D L $,ব࣪ՈˊₓDŽˊ ˊ ˊ ᭄ₓߎ GL R 'ϡՈ᭄ₓՈߎˈгᓔ݇ₓߎ RüR R DŽˊ ˊ ˊ ᢳₓߎ D R $ব࣪ՈˊₓՈߎDŽˊ ˊ ˊ ₓ S L ,ϡՈₓՈDŽˊ ˊ ˊ ₓߎ S RϡՈₓՈߎDŽˊ ˊ ˊ GHˈL X᭄ˊிඣЁ᭄ℸඣՈϔDŽˊ ˊ ˊ ߎ᪂ R GHˈR X᭄ˊிඣЁඣễߎ᭄ՈϔDŽˊ ˊ ˊ ߎ᪂ LüR GHˈLüR X ᭄ˊிඣЁϬᴹᇚ᭄ඣˈඣ᭄ˈՈ᪂DŽˊ ˊ ˊ ẋߎỞ S LˋR FDŽָՈߎӊՈᘏDŽӊᇚᝯখ᭄ བ⏽ᑺǃǃₓˈ ǃǃ៤ˈˈ Ոᢳₓǃ᭄ₓǃᓔ݇ₓǃₓ ˈḰᤶࠊᩥਜ਼ᴎ᠔Ո᭄ₓˈᑊࠊᩥਜ਼ᴎߎՈ᭄ₓḰ ࠊ᠔ՈˊₓDŽˊ ˊ S Hᩥਜ਼ᴎிඣЁЏ఼ߚՈ݊ՈᘏDŽˊ ˊ ˊ ᴎ Sϔߎ᪂ˈᇚᩥਜ਼ᴎߎǃՈ᪂DŽˊ ˊ ˊ K G FD ᰒ߾ញՈDŽᩥਜ਼ᴎՈߎˈָՈ᭄ӊ ਞǃᜬ DŽˊ ˊ ˊ ˋ᭄ǃ᭄ˋḰᤶ఼ $ˋ'ǃ'ˋ$ FᇚՈᢳₓ བ˖ǃϹ ḰᤶՈ᭄ₓᑊḰᤶՈ᪂DŽˊ ˊ ˊ ֜ Gϔඈ᳝Ոᵘ៤Ոញˈ᭄݊Ոˈᑊᇚ݊ЏᴎDŽˊ ˊ ˊ֜ϞՈϔࠊˈҹ᪂ǃᅠϔϾՈDŽ ˊ ˊ ˊ ᭄֜ϞՈϔDŽᔧᅗϬᯊˈৃҹᅲ᭄ǃՈᅠDŽˊ ˊ ˊ ߾఼F GH U W &ࢴ߾఼ Y GR GL Xˈ'8 DŽᩥਜ਼ᴎߎՈᰒ߾఼ˈৃҹᰒ߾ǃᜬǃ᪱ˈỞϬඃ߾DŽᰒ߾఼ϟ┈ ᪂֜ǃ఼ˈϬᰒ߾఼ᴎᇍDŽˊ ˊ ˊ O SӊՈ⌟ញDŽϬѢ⌟ᰒ߾఼Ոˊˈᩥਜ਼ᴎᑊᇍՈ ǃDŽˊ ˊ ˊ Wࠊᰒ߾఼ϞՈϔDŽỞˈࠊՈᮍDŽˊ ˊ ˊ ఼ Pᩥਜ਼ᴎՈϔ఼ˈỞϔᜬ☦DŽ ˊ ˊ ˊ Ꮉঝ H VկࠊᎹϬՈˈᇍᩥਜ਼ᴎிඣẟඈᗕǃǃׂՈঝDŽ ˊ ˊ ˊ ᪡ঝ R VկϬՈϔࠊৄDŽᰃᩥਜ਼ᴎⒸՈҎᴎˈϔϾ߾఼ˈẜ ࣙϔϾˈབ⏲֜ǃDŽ ˊ ˊ ᩥਜ਼ᴎ֕ Vˊ ˊ ˊ ᩥਜ਼ᴎ֕ඣ F P Vᇍϣখ᭄᪂⌟ˈᑊˊৢ߾ǃǃᨪՈᩥਜ਼ᴎிඣDŽϬ ѢࠊிඣՈϔᾬᯊࢴĀ᭄ඣā GDˈ'$ DŽˊ ˊ ˊ ᩥਜ਼ᴎ֕ඣ F V VᇚϣՈখ᭄ǃᝯᇍᬥ⌟໘ˊˈᑊՈࠊᢈǃࠊ Ոᩥਜ਼ᴎிඣDŽˊ ˊ ˊ ᭄ GD Dᇚᩥਜ਼ˊẋҹঞࠊЁՈ᭄ҹ₋ˈḰᤶ᭄ᔧˊՈẋDŽˊ ˊ ˊ ᭄ˊ GD Sᇍ᭄ඣՈ᪡ˈབඃǃDŽˊ ˊ ˊ ᭄ GD U GˈGD Oᇚᩥਜ਼ᴎẔ⌟໘ˊẋՈ᭄ˈϔᴎߎᴹDŽ ˊ ˊ ˊ ᭄ K GD PᇚₑՈẔখ᭄ᅮ఼Ёˈᖙᯊˈৃҹᯊ᫇ߎᰒ߾ˈᯊⒸৃҹᰃϔϾǃϔ᭄DŽˊ ˊ ˊ ᅮᯊ S GL Oᇚᩥਜ਼ᴎẔ⌟໘ˊՈ᭄ՈᯊDŽˊ ˊ ˊ S OᴎඈߎɴᯊˈᇚǃৢϔᅮᯊⒸݙᣛՈখ᭄᭄ߎᴹDŽ ˊ ˊ ˊ ᴎ U W OਃࡼՈᮍ খ᭄ᨪǃ᪂ਃذ ਃࡼᴎˈঞᯊᇚ᳝݇খ᭄᪂Ոᓔ݇ߎᴹDŽˊ ˊ ˊ ӊ V R Hথᯊˈᓔ݇ՈˈᯊⒸߎᴹDŽˊ ˊ ˊ ߚ UϬᴹҹՈᴵՈ᳔ⒸˈᇍѢϔϾ⌟ₓிඣˈҹ⌟ₓՈ᳔᭄ₓ˗ᇍѢϔϾࠊிඣˈҹࠊՈ᳔ₓ˗ᇍϹˈᓔ݇Ո᳔ᯊⒸⒸˈϔ൫˗ᇍ&ˈǃᜬՈᑺDŽˊ ˊ ˊ V Uҹ᭄ᜬ߾ՈϔிՈDŽˊ ˊ ˊ ₋ V S GࠊிඣЁⒸՈᯊⒸⒸDŽˊ ˊ ˊ &߾ & GLᇚ᭄ඣЁՈẔ⌟໘ˊ&߾ߎᴹˈབඈখ᭄ᰒ߾ǃ߾ǃ߾ǃඃ߾ǃ߾DŽˊ ˊ ˊ ᗻᩥਜ਼ S Fᇚ᭄ඣЁ⌟໘ˊՈ᭄ˈՈᇍᴎඈẔᩥਜ਼ˈབϬϹˈǃᴎᬜǃᴎඈᬜǃ(ǃ⛁DŽ ˊ ˊ ˊ ᪡ R J GDᇍᴎඈਃǃذǃˊՈϬ᭛߾ˈгᨪߎˈؐʱҹDŽˊ ˊ ߚࠊிඣ GL G F V '₋Ϭᩥਜ਼ᴎǃỞ߾ˈᅲᇍϣՈ᭄ǃࠊᡸˈϬỞ᭄Ոᩥਜ਼ᴎ֕ඣˈ݊ˈ᭄ˈৃDŽԧгҹᰃӊՈߚDŽ ˊ ˊ ˊ ẋࠊ൫ S F OߚࠊிඣᵘЁՈϔ൫ˈ൫ϵՈẋঝǃࠊঝඈ៤ˈঝ⌟Ҿᜬᴎᵘˈᅠ᭄Ո₋໘ˊˈᑊᇍᎹࠊ֕DŽˊ ˊ ˊ ֕൫ V OߚࠊிඣᵘЁ൫ՈϞϔ൫DŽϵᴎ݇ඈ៤DŽ൫ЏࠊϢࠊҹঞˊDŽˊ ˊ ˊ ˊ൫ P OߚࠊிඣᵘЁՈϔ൫ˈϵˊҎᴎඈ៤DŽ൫ҹˊϢˊˈࣙᑺǃிඣǃₓࠊǃࠊᜬǃ᭄ẟǃᦤDŽˊ ˊ ˊ ࠊঝ F Vߚࠊிඣẋࠊ൫ЁՈϔঝˈϬҹᅲᇍᎹՈ᭄ָࠊDŽ ࠊঝҹˈг᭄ඈ៤൫֕ඣDŽ ˊ ˊ ˊ ᭄ঝGD D Vߚࠊிඣẋࠊ൫ЁՈϔঝˈϬѢₓՈẔখ᭄ᅲ᭄Ո₋ˈᇚ݊ᔧՈḰᤶ໘ˊDŽ ᭄ঝҹˈгҹϢ᭄ඈ៤൫֕ඣDŽˊ ˊ ˊ ࠊঝ V F Vϵࠊ఼ S O F ߚࠊிඣࠊঝඈ៤ˈϬҹᅲՈࠊDŽࠊঝҹˈг᭄ඈ៤൫֕ඣDŽˊ ˊ ˊ ẋঝ S Vᰃࠊঝ᭄ঝՈᘏDŽˊ ˊ ˊ ഫࠊ៤Ոǃ໘ˊǃ᫇ࠊǃǃᨪՈ࣏ഫDŽˊ ˊ ˊ ඈᗕǃ FߚࠊிඣЁˈϬඣᡅᇍϡՈഫᔧඈՈẋӊඈᗕDŽ ߚࠊிඣЁˈϬඣᡅˈᇚϡՈঝǃӊˊඈӊDŽˊ ˊ ˊඣ P L V ,ᰃϔϾᩥਜ਼ᴎՈҎᴎிඣDŽˊ᠔ҹϔϾՈϣDŽϔǃࠊˊˊᵘ៤DŽඣˈϣǃᩥǃǃǃǃҎǃඣDŽிඣҹ᭄ǃᜬՈᮍˊˈҹᇍՈˊ᳔ࠊDŽ ҹॖˈϵ൫ՈϣǃᩥǃǃǃǃҎǃඣඈ៤Ոˊඣˈࢴ൫ˊඣDŽˊ ˊ ॖ൫֕ඣ S V L V Ϭᇚᴎඈᩥਜ਼ᴎ֕ඣЁՈ᳝݇ᯊ᭄ؐ ᘏ Ո᪡ঝˈЎؐ ᘏ ֕ᴎඈᅝՈᅲᯊDŽᯊгᑺᇚᴎඈՈ'DŽ ˊ ৃ U᳝˖D ᢈᴵӊϟᢈՈᯊⒸݙᜬǃࠊញᩥਜ਼ᴎிඣᅠՈ࿁DŽՈᯊⒸՈՓϬ᭄ݙˈ᪂ ఼ࣙӊ ࿁ՈDŽϵඣᩥ⌟ₓ᳝ˈ᠔ҹϔϬⒸᯊⒸᜬ߾DŽ ˊ ˊ ৃ PᴵӊᇍՓϬՈҾᜬǃࠊញᩥਜ਼ᴎிඣˈẟՈᑺˈՈ࿁DŽˊ ˊ ৃϬᯊⒸ D WϬՈᢆߎথˈᴵӊབǃ⇨ℷՈϟˈிඣញϬՈᯊⒸDŽˊ ˊ ᯊⒸ P W Ҿᜬǃࠊញᩥਜ਼ᴎிඣՈᢈݙˈᢈᴵӊϟⒸՈᯊⒸؐDŽˊ ˊ ᯊⒸ P W W UҾᜬǃࠊញᩥਜ਼ᴎிඣᢈݙˈᢈՈᴵӊϟˈẟՈᯊⒸՈؐDŽˊ ˊD ᇍϡՈҾᜬǃࠊញˈՈᎹᯊⒸᬙՈᯊⒸˈҹ P W W ᜬ߾DŽᇍৃՈҾᜬǃࠊញˈⒸՈᎹᯊⒸˈᯊᯊⒸDŽˊ ˊ ᬙிඣிඣЁՈ Ҿᜬǃࠊញᩥਜ਼ᴎிඣ ϡՈDŽˊ ˊ ৃϬ DϔϾிඣℷՈᯊⒸᩥՈᘏᯊⒸˈϬ᭄ᴹᜬ߾ˈेˋ DŽˊ ˊ GX GD GHᇍிඣЁ݇⏲Ո໘ϬźՈ᪂DŽˊ ˊ ֵ F P GH VᯊѢ ߎ ⒸՈؐՈDŽ ˊ ˊ P GH YѢ ߎ ⒸՈǃؐՈϹDŽҹᰃᴎ⌟ₓDŽˊ ˊ ᑆᡄ F P GH LϵՈߎՈব࣪DŽˊ ˊ ࠊ F P GH UҾᜬǃࠊញᩥਜ਼ᴎிඣࠊṗᇍ݊ߎՈ࿁DŽ ˊ ˊ ࠊ↨ F P GH U UҾᜬǃࠊញᩥਜ਼ᴎிඣՈˈϢߎՈՈDŽ ࠊ↨Ϭ↨ؐؐՈ Ոߚ᭄ᜬ߾DŽˊ ˊ ֵ V P GH VҾᜬǃࠊញᩥਜ਼ᴎிඣϬՈDŽˊ ˊ V P GH Yᝯ⌟ϹϬՈDŽˊ ˊ ᑆᡄ V P GH Lϵ߾ؐߎՈব࣪DŽˊ ˊ ࠊ V P GH UҾᜬǃࠊញᩥਜ਼ᴎிඣࠊṗᇍ݊ߎՈ࿁DŽ ˊ ˊ ࠊ↨ V P GH U Uߎব࣪Ոֵؐᇍѻߎব࣪ₓDŽࠊ↨Ϭ↨ؐؐՈ Ոߚ᭄ᜬ߾DŽ ☿ˊ Ⴎ D OᰃᇍϔϾࠊ᠔Ո࣏ᑺDŽ݊খ᭄Ẕ⌟ǃ᭄ˊǃႮࠊǃࠊǃᨪᡸঞඣ᪂ᩥՈᅠᑺˈ᳔ؐʱՈ᭄ₓ᠔ՈDŽ☿থՈႮᴎࠊₓঞ˗ᜬঞࠊ᪂ₓ˗ඣ᪂ᩥՈᅠᑺ˗ᮑᎹₓ˗ᡸᯬՈDŽˊ ⛁ᩥ GH R S S D ᩥᇍᬥՈᴵӊᡅˈϔᇍখ᭄Ẕ⌟ P ǃᨪ D ǃࠊ F ᢳₓࠊǃࠊᓔϔ݇ࠊ ᡸ S ݙՈႮඣDŽेᇍǃᴎඈঞிඣǃ(୍ࠊඣˈǃǃǃկǃˊǃ⊍⊍ඣᡸ᠔ՈҾᜬࠊ᪂ඣϔՈிඣ᪂ᩥᅝᩥDŽ ˊ ˊ ࠊᮍ F P GHؐʱࠊᴎඈ݊᪂ՈẔՈˈЏݙࠊ֜ ৄ Ո᠔Ո֕DŽϔࠊ▊ࠊDŽˊ ˊ ࠊ O Fࠊ֜ ৄ Џ བǃᴎ ඣ བ┨ඣǃ⛁ඣ ┈ˈⒸ བˊḪⒸǃկ⊍⋉ ݙˈؐʱࠊ֜ϞˈߚᇍᝯᇍᬥՈẔࠊDŽ ˊ ˊ ▊ࠊ F G FᇚϣՈ᪂݇ඣՈࠊ֜ ৄ ▊ࠊݙˈؐʱᇍՈᴎඈẟՈ֕ࠊDŽˊ ˊ ᴎࠊ üW F G FᇚǃᴎՈࠊ֜ ৄ ▊ࠊݙDŽЏϬѢඣЎࠊՈᴎඈDŽˊ ˊ ࠊ X F G Fᇚᴎඈ ǃᴎঞᴎ Ոࠊ֜ ৄ %֜ ▊ࠊݙˈؐʱᴎඈϔϾࠊDŽϬѢϹඣഛࠊՈᴎඈDŽˊ ˊ ḪⒸؐʱࠊ QüR F GH ϡؐʱˈඣᇍϣࠊՈḪⒸˈℸିⒸՈᡸிඣᅠˈᬙᯊৃҹႮՈ᪂DŽ ˊ ᢳₓࠊிඣ P GX F Vᅲǃᴎঞඣখ᭄ႮࠊՈᘏDŽඣЁˈᐌখ᭄Ⴎࠊঞᨪˈᇍࠡˈ݊ߎₓЎₓՈ᭄DŽᇍӊЁгࠊிඣ&GOü W V DŽ ˊ ˊ ᴎඈࠊ X F GL G FᇚüᴎඈϔϾࠊˈỞࠊಲᴎඈႮՈᎹˈǃᴎՈႮඣথߎˈҹব࣪Ո◄ˈᴎඈ᫇ǃ᫇Ո࿁DŽϬՈ൫ᰃࠊிඣᴎࠊிඣDŽˊ ˊ ˊ P GH W % ᴎࠊ ᓔɳ ˈࠊ ˈՓՈ ᴎব࣪Ո◄DŽℸҹϬˈˈгᴎՈϔDŽˊ ˊ ˊ ᴎ W P GH 7 ࠊ ᓔɳ ˈᴎႮࠊ ˈՓᴎࠡDŽℸᴎඈᴎࠡˈˈгᯊϡՈϔDŽˊ ˊ ˊ F GL G P GHǃᴎᯊࠊՈࠊிඣˈℸՈϬˊ ˊ ࠊிඣ F VᅲࠊՈᘏDŽˊ ˊ ˊ ࠊ GüZ FࠊẟₓՈႮࠊிඣDŽᇍˈࠊிඣDŽˊ ˊ ˊ ࠊ F FࠊẟₓՈࠊிඣˈेࠊՈႮࠊிඣՈˈࣙǃₓࠊDŽˊ ˊ ˊ ࠊ S Fࠊ ℷ ՈႮࠊிඣDŽˊ ˊ ˊ ễࠊ D FࠊₓՈႮࠊிඣDŽˊ ˊ ˊ ࠊ FࠊẟՈₓ (ˈ⊍ˈϬ⇨བǃǃ ՈႮࠊிඣDŽˊ ˊ ˊ ẋ⏽ࠊ V V W F ࠊ⏽ᑺՈႮࠊிඣDŽˊ ˊ ˊ ⏽ࠊ U V W Fࠊ⏽ᑺՈႮࠊிඣDŽˊ ˊ (ᴎࠊிඣ S ˈP ᅲ(ᴎࠊՈᘏDŽˊ ˊ ˊ (୍⏽ᑺࠊ S W F(ˈࠊ(ᴎߎ(୍⏽ᑺՈࠊிඣDŽˊ ˊ ˊ (ᴎҎ ࠊ P L S F ᇍ(ᴎҎ ࠊՈࠊிඣDŽ(ᴎࠊඣՈϡˈࠊবₓᝯₓᰃՈDŽˊ ˊ ˊ (ᴎࠊ O G F R PࠊẟՈ(ₓˈՓ(ᴎ᳔ϟẔՈࠊிඣDŽ ˊ ˊ ᴎࠊிඣ W F VᅲᴎࠊՈᘏDŽेᴎḰợথᴎՈؐՈႮࠊிඣDŽˊ ˊ ˊ ᴎࠊிඣ P K GU F ϵᴎˊ᪂ᩥՈӊǃӊᴎᵘᵘ៤ՈᴎࠊிඣDŽඣDŽˊ ˊ ˊ Ϲࠊிඣ HüK GU F ϵˊ᪂ᩥՈӊǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽඣDŽˊ ˊ ˊ ᭄ࠊிඣ GL üK GU ' ϵˊ᪂ᩥՈӊǃ᭄ ᩥਜ਼ᴎ ǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽ᭄DŽˊ ˊ ˊ ᢳࠊிඣ D üK GU $ ϵˊ᪂ᩥՈӊǃᢳǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽᢳDŽˊ ˊ ˊ ᴎϹࠊிඣ PüHüK GUϬᖂൟᴎ ᩥਜ਼ᴎ ঞᴎᵘᅲᴎႮࠊՈࠊிඣDŽ ⊼˖г᭄ࠊிඣˈᴎՈĀ'āˈĀˊ ˊ ˊ ᴎႮਃذிඣ D GR $7ᴎՈ⛁݊খ᭄ˈᴎࠊிඣᅠᴎՈਃࡼǃᑊذՈႮࠊிඣDŽˊ ˊ ˊ ᴎ⛁֕ඣ W V V V ₋Ϭ᭄ൟˊൟՈᮍ⌟ḰᄤՈ⛁ˈᇚᴎࠊிඣˈϬҹࠊՈՈˈֱḰᄤݙՈႮඣDŽˊ ˊ ˊ ᴎඣ H W VᴎẔˈߎɴᯊ࿁ᮑẟˊˈᑊᯊˈ࿁ᮑˈذᴎẔՈֱᡸிඣDŽ ˊ ˊ ˊ Ḱợࠊ V G FᴎࠊிඣϔˈϬѢਃࡼǃᅮḰợࠊDŽ ˊ ˊ ˊ ࠊˋ O G JᴎࠊிඣϔˈϬѢᇍᴎඈࠊDŽˊ ˊ ˊ ࠊ O G OᴎࠊிඣЁՈࠊϔˈỞࠊᴎ᫇ՈᓔᑺᴹࠊᴎඈߎDŽˊ ˊ ˊ ᡸࠊ RüV G S F ᡸࠊᰃϔࠊՈࠊDŽ᳝ϬᑺࠊᮍՈˈгϬࠊᮍՈˈབᴎḰợḰợՈ ˁᯊˈ݇⒱ˈᔧḰợᯊᓔਃ᫇ˈབℸডˈָḰợࠊಲҹḰợ˗ᯊ₋ϬDŽˊ ˊ ˊ ᡸ RüV G S WᴎֱᡸிඣϔˈᔧᴎḰợϔؐᯊႮᴎ݇ЏDŽˊ ˊ ˊ ࠊ YüS Fᴎࠊிඣϔˈָࠊ᫇ᓔᑺՈࠊᮍDŽ ˊ ˊ ˊ Q JϬবՈᮍবẟₓՈ᫇DŽ$ S DŽˊ ˊ ˊ Ā JϬবẟᓔᑺՈᮍবẟₓՈ᫇DŽ$ DŽˊ ˊ ˊ U R O Gᴎࠊிඣϔˈᇚᴎℷϟ᠔ՈˈথՈⒸݙᾬDŽˊ ˊ ˊ ᫇ YᴎࠊிඣϔˈᔧⒸᬙᴎᑺᯊˈ݇⒱ˈᑊᓊảϔڱᯊⒸৢˈᓔਃ᫇ˈҹᴎϹՈˈிඣՈˈϡிඣሥDŽ ˊ ˊ ˊ ϹḰᤶ఼HüK GU FࠊிඣЁˈᇚϹࠊḰᤶࠊՈ᪂DŽˊ ˊ ˊ ⊍,ǃߕ S WϹḰᤶ఼Ёࠊ᫇⊍ₓᮍՈDŽˊ ˊ ˊ ⊍ᴎ VỞ⊍Ϲࠊࡼ⊍ˈՓЏՈᴎᵘDŽ ˊ ˊ ˊ ˊ Y Pᅮǃ ব࣪Ոᡅˈব᫇Ոᓔਃᮍˈᴎ ܼ ᾬ ՈϟẔDŽḰᤶ $ˋ$W DŽˊ ˊ ˊ Ḱợ ᑺবࡼ GU S V G Y ᴎࠊிඣඃՈDŽỞҹᇍᑨՈḰợؐϢḰợؐՈ᭄ᴹᜬ߾DŽˊ ˊ ˊ ả GH G GඃϟᜐᯊՈϡˈࢴảDŽảҹϔϟᜐඃᇍᑨՈḰợؐϢḰợؐՈ᭄ᜬ߾DŽ ˊ ˊ ݊ˊ ˊ ˊ ࠊிඣ F V %ᴎՈႮǃ⏽ᑺႮࠊிඣՈᘏDŽ ˊ ˊ ˊ Ⴎࠊ D J F $*ࠊথᴎՈႮࠊிඣDŽˊ ˊ ˊ Ⴎᑺிඣ D GL V $'ǃᝯᴎඈᖂඃˈᅲᑺ ՈႮࠊிඣDŽˊ ˊ ˊ Ⴎඣ D V G V $ᴎࠊிඣՈϟˈᅲᴎႮՈࠊிඣDŽ ˊ ᓔ݇ₓࠊிඣ üR Vᅲǃᴎঞਃǃذᓔǃ݇ՈᘏDŽˊ ˊ ࠊிඣ V F VᇍϔᎹඣЏᴎϔᅮࠊՈࠊிඣ ᓔɳࠊࠊ DŽˊ ˊ ˊ ඈ൫ࠊ J FᡞՈՈ᪂ϔϾՈࠊˈབࠊDŽˊ ˊ ˊ ඈ൫ࠊ V FᡞϔᴎঞϔඣϔϾՈࠊˈབᴎǃᓩᴎǃՈࠊǃ఼ࠊDŽˊ ˊ ˊ Ϭ᪂ࠊ D V Gü FҹϞՈ᪂ བ ˈẔذߎᯊˈϬ᪂ਃࡼՈࠊDŽˊ ˊ ˊ ఼ࠊிඣ F V %ব࣪Ոᡅ఼ˈႮ఼ՈࠊඣDŽЁⒸࠊඣЁ៤ᇍՈ఼˗ָࠊඣЁϔৄ(ᴎঞՈਃذࠊிඣˈгϔҹՈࠊிඣDŽˊ ˊ RüWüR Fࠊᓔ݇ ᇍᑨϔৄϹᴎՈ఼ ఼ ˈᑊᇍৄ఼ ఼ ẟ ᓔǃ݇ ᪡DŽˊ ˊ ඃ V FϬᇍϹᴎՈ఼ ఼ ẟˈ໐ϬՈ᪡ᓔ݇ ᇍϹᴎ఼ ఼ ẟ ᓔǃ݇ ᪡DŽˊ ˊ ᓔ݇ₓ᪡఼ üR VϬѢᇍᴎẟਃǃذᓔǃ݇Ո᪂DŽϔᓔ݇DŽˊ ᨪ Dˊ ˊ ᨪඣD Vߎˈҹᜬࠊிඣϡிඣখ᭄ؐՈႮඣDŽˊ ˊ ؐᨪ O DẔߎবₓϟՈᨪDŽˊ ˊ ᨪGH DẔߎবₓؐՈᨪDŽˊ ˊ ఼ Dᜬ݇খ᭄ՈDŽᇍҹᜬ߾ᨪݙՈ఼ࢴDŽˊ ˊ ߎ RֱᡸࡼˈỞˊញϬ߾ߎᓩᡸࡼՈϔDŽ ˊ ˊ ᨪᡥࠊ D F RᨪՈϔˊᮍˈབ བਃࡼ ϟˈখ᭄ؐᨪؐᡅˈᬥˈЎᨪՈᮑDŽˊ ֱᡸϢ S Lˊ ˊ ඣ G ᔧᯊˈֱᡸ ݙ ໐ࠊᮑՈႮඣDŽࣙඣ V V ఼ࠊிඣ % DŽˊ ˊ ˊ ᘏ P WϵֱᡸˈՈ᠔DŽ ˊ ˊ ˊ ⊍ R W݇⒱⊍ˈՈ᠔⊍ₓDŽˊ ˊ ˊ WϵẔ ϔ(୍ ႮDŽˊ ˊ ˊ ☿ḰবЎՈ࣪ᢅ݊ˊᜬDŽˊ ˊ ˊ ☿ HᇚḰবЎᢅϡᢅՈDŽˊ ˊ ˊ VՈ᳔ব࣪ϟˈՈ☿DŽ ˊ ˊ ˈ ☿⌟఼ GHẔ⌟☿ᔎߎৃϬՈϹՈ᪂DŽˊ ˊ ˊ ܼ O R Dᜬ߾Ոϔˈᵘˈ᳝ϟ߫DŽD ᇍ˖Ϭ఼☿⌟⌟ᮍˈᔧϔ⌟఼Ẕ⌟Ո ˋ ᯊ˗Ϭܼ⌟ᮍˈᔧ ˋ ҹϞՈ☿⌟఼Ẕ⌟ϡᯊˈᅮDŽᇍ:ൟ ⚻ᓣ♝ၟ˖ᔧẔ⌟ࠄ☿Ѣϔ᭄ₓᯊ ৃ ⚻᭄ₓঞ ˈᅮ♝ၟ☿DŽF ᇍᓣ ⚻♝ၟ˖ᔧϔ߫ ⚻☿Ẕ⌟఼Ẕ⌟ࠄՈ☿Ѣϔ᭄ₓᯊˈᅮ♝ၟ☿DŽˊ ˊ ˊ ⚻☿Ẕ⌟ L G ϔ ⚻ѢẔ⌟ ⚻☿Ẕ⌟ᮍᓣDŽ ˊ ˊ ˊ ☿Ẕ⌟ H Gᓣ♝ၟˈ ⚻☿Ẕ⌟఼ˈϬ ⚻ ⚻☿Ẕ⌟ᮍᓣDŽˊ ˊ ˊ ܼ♝ၟ☿Ẕ⌟ Gϔ ⚻☿Ẕ⌟఼ˈϬẔ⌟ܼ♝ၟ ⚻☿Ẕ⌟ᮍᓣDŽˊ ˊ ˊ ☿ FẔ ⚻ ˁ ˁ ⚻☿ˈϔᅮᯊⒸ བ V ݙּᯊՈ☿DŽˊ ˊ ˊ ☿ O R O W D Fᓣ ⚻♝ၟϔˈ᳝ ⚻ˈߎ ⚻ ᭄ₓৃ Ո☿DŽˊ ˊ ˊ ᾬ☿ S O R♝ၟϔϾ☿ ⚻☿DŽˊ ˊ ˊ ♝ၟ HϬₓϟˈễ♝ၟˈҹ┨ӏ ˈᑊ˖D ᯊⒸѢ P♝♝ၟݙ DŽˊ ˊ ˊ Āₓ S UϡѢܼₓՈ ˁˈᯊѢ ˁₓDŽ ˊ ˊ ˊ V ⚻☿఼ৢˈՓ ⚻ ᭭DŽˊ ˊ ˊ ⊍ V V R YˈV W Y ᭭ˈႮ ⚻ ᭭☿ DŽˊ ˊ W V L 7 ֕ ǃǃǃᴎ᭄ ՈDŽ ˊ ˊ ˊ Ḹ D PˈW S P ֕ḸDŽˊ ˊ ˊ W V P֕DŽˊ ˊ ˊ G H P֕DŽˊ ˊ ˊ D ҹˈ⌟ₓDŽˊ ˊ ˊ Ḹ Ḹ U H P֕ḸDŽˊ ˊ ˊ Ḹ Ḹ Vˋ Y P ֕ḸḸDŽˊ ˊ ˊ ] VᰃϔϾˈϬḸDŽˊ ˊ ˊ WϔˈDŽ⌟ₓḸ᭄ˈᑊ⌟ߎখDŽˊ ˊ ˊ Ϲ H F Sϔᓣˈҹˈ࿁⌟ₓ⌟ᜬѢᅝDŽˊ ˊ ˊ W⌟ₓḸDŽˊ ˊ ˊ ᬙ D U Hü P $'ᰃϔϾ Ḹ᭄ˈỞẔˈᇍǃ໘DŽẔ⌟ঞ᭄DŽ ˊ ˊ L᳝˖D བṗǃ♝ ⚻ ˈϔ᪂ᯊˈЎৢৢՈDŽ Ўߎϡ࣏ˈ໐ˈ₋࣏ˈҹˈབʌࡴDŽˊ ˊ ᴎ FথᯊˈՓ♝ϔˈৢˈৃᓣ˖D ˁ)ˈᰃᓣDŽˁ)ˈᰃ♝ᓣDŽˊ ˊ U 5ᰃDŽ བඝǃễǃᓩ থǃᴎᯊˈDŽ ˊ ˊ L Fϔখ᭄ࠄϔ᪂ᯊˈᯊϔ᪂DŽ ˊ ǃ F UˈF֜ ৄ ˈᇍĭDŽ ˊ ˊ X F U᳝ᯊࣙ֜ Ո֜ ৄ ˈᇍDŽˊ ˊ F U֜ ৄ ˈᇍDŽབൟ☿ǃ♝ǃ┨DŽˊ ˊ Џ H Fࣙǃবǃկ Ո֜ৄˈĭDŽˊ ˊ ϹϹ F UկDŽˊ ˊ O F Uˈᅝி֜ ৄ Ոˈབ♝ǃǃǃ┨ǃǃ ┨ᇬ DŽˊ ˊ ᴎ♝ üW F U♝ˈ♝ǃ֜ ৄ ՈDŽˊ ˊ HüQ F U֜ৄǃᇍDŽˊ ˊ Ϲ H Uᅝ ࣙ ᶰDŽˊ ˊ ؐ V H UϹՈˈݙDŽˊ ֜ ৄǃᶰˊ ˊ ֜ǃሣ SݙDŽ ϬѢᅝǃDŽˊ ˊ ᶰ Fˈੵ᳝ ݙǃDŽੵDŽˊ ˊ ֜ FǃՈ֜ ሣǃᶰ DŽ ˊ ˊ ৄ FਬৄDŽৄϞ֜ DŽˊ ˊ ᴎ֜ %֜ W J S♝ǃǃথ֜ ৄ DŽˊ ˊ ֜D S┨֜ˈ݊֜DŽˊ ˊ ֜ ሣ P S֜ ሣ Ϟ߾ˈҾǃ߾֜ ሣ DŽˊ ˊ ֜ ሣ VüP S֜ ሣ Ϟ߾֜ ሣˊ ˊ ֱੵ ᶰ Zü Fੵ ᶰ ݙࡴˈ࿁ݙੵ ᶰ DŽ֜ ሣ Ϟ߾DŽᇬ⓶ੵᶰDŽࡴˊ ˊ ⛁ᶰ ੵ üG Ўᶰ ੵ ˈᶰݙֱ݊DŽᶰᓣᓣᓣϸDŽˊ ˊ ੵ ᶰǃᶊ W FˈUկੵ ᶰǃᶊ ˈݙDŽˊ ˊ ᶰ U FញࡴᶰDŽˊ ˊ ൫ G R S൫ * ü ᬜ, ᷛẔˈᇍੵ ᶰ ˈĭ ࣙᇬ ẟDŽ, Lü W S ߾DŽ ˊ V DŽˊ ˊ ☿Ϲ S S Vᇍˈ࿁ˈЎDŽ ᭄݊Ո߾ǃǃ᪡ǃႮDŽˊ ˊ ܼǃ Ϣ֜ǃৄঞ݊ϞϔDŽẔ ᭄ՈϔˈᑊᯊՈˈDŽˊ ˊ ǃ U V K U᭄Ոϔˈ֜ǃৄњDŽ ǃˈ໐DŽˊ ˊ Ởൟ J Vϔˈ֜ ৄ ǃൟњˈ ᳝DŽˊ ˊᝯǃࡼDŽ ˊ ˊ ĭ Sĭ֜ǃৄDŽ ˊ ˊ ᝯ SϵDŽǃ᭄ൟ᭄ ՈDŽˊ ˊ ৄ ৄ L V֕ˈϔৄ&֜ˈ ࡴϔϾDŽˊ ˊ V VϬDŽ˖D Ϲൟ˗ৄ˗F ˗G ᩥிᅲDŽˊ ˊ V F ՈDŽϔ˖D Ꮉ ˗ᯊ˗F ᬙ┨˗G Ẕǃൟ˗H ₑ˗ᅲᯊǃ˗J ˗K ᭄໘˗L ˗DŽˊ ˊ R VᇍՈˈϔϔৄϔϾ֜ˈ֜DŽˊ ˊ ,ˋ2 ,ˋ2 L Hᇍ֜Ϟˈϔ$ˋ'ǃ'ˋ$ǃ',ǃ'2DŽˊ ˊ Ϲൟ S P VǃᅲᯊഄǃՈˈ݊ѢൟϬDŽˊ ˊ L V VЎDŽˊ ˊ ⌟᪙ G D W V ᇍ ࣙǃᜬ֜᪂,ˋ2 ẟ⌟᪙DŽᆵ᭛௦ᓩAabsolute expansion monitor of turbine ..............................................4.6.2.4 accuracy ...........................................................................3.2.17 accuracy class......................................................................3.2.18 actuator, actuating element ........................................................3.3.20 adaptive control ...................................................................3.3.11 air flow control ...................................................................4.3.2.4 alarm ..............................................................................4.5 arm cut out ........................................................................4.5.6 alarm display.......................................................................3.4.2.8 alarm system .......................................................................4.5.1 analog electro hydraulic control (AEH) .............................................4.3.4.4 analog input ˄AI ˅..................................................................3.4.3.2 analog output (AO) .................................................................3.4.3.4 analogue signal ................................................................... 3.4.2.3 annunciator ........................................................................4.5.4 application software .............................................................. 3.4.1.22 automated diagnostics for steam turbine [rotating equipment] (ADRE) ...............4.6.2.11 automation ........................................................................ 3.1 automatic control ................................................................. 3.3.1 automatic control system ...........................................................3.3.17 automatic dispatch system (ADS) ....................................................4.3.5.3 automatic generation control (AGC) .................................................4.3.5.2 automatic level ................................................................... 4.1 automatic synchronized system (ASS) ............................................... 4.3.5.4 automatic stand-by control ........................................................ 4.4.1.3 automatic turbine startup or shutdown control system (ATC) .........................4.3.4.6 auxiliary panel ................................................................... 4.8.6 available time .....................................................................3.5.2 availablity ....................................................................... 3.5.7 axial movement .................................................................... 4.6.2.1 Bbar chart display ................................................................. 3.4.2.12 (function) block .................................................................. 3.4.6.8 boiler control system ............................................................. 4.3.2boiler follow mode (turbine base) (BF) .............................................4.3.1.1 boiler-turbine centralized control................................................. 4.2.4 boiler-turbine control room ........................................................4.7.6 boiler turbine generator panel......................................................4.8.5 burner control system (BCS).........................................................4.4.1.4 bus ............................................................................... 3.4.1.11box ............................................................................ ...4.8.2bypass control system (BPC).........................................................4.3.5.1C cabinet.............................................................................4.8.2cable room..........................................................................4.7.4 cascade control ................................................................... 3.3.8 cathode ray tube (CRT) ............................................................ 3.4.4.7 centralized control ............................................................... 4.2.3 centralized monitoring system.......................................................3.1.7 combustion control..................................................................4.3.2.2 common mode interference .......................................................... 3.5.11 common mode rejection ............................................................. 3.5.12 common mode rejection ratio ....................................................... 3.5.13 common mode signal..................................................................3.5.9 common mode voltage ................................................................3.5.10 computer monitoring system..........................................................3.4.5.1 computer systems....................................................................3.4 computer supervisory................................................................3.4.5 computersupervisory system..........................................................3.4.5.2 configuration ..................................................................... 3.4.6.9 console.............................................................................4.8.4 continuous control system ......................................................... 3.3.18 control ........................................................................... 3.3control board.......................................................................4.8.3control building....................................................................4.7control display.....................................................................3.4.2.7 control mode........................................................................4.2.1control room....................................................................... 4.7.2control station.................................................................... 3.4.6.4 control valve.......................................................................3.3.22control with fixed set-point........................................................3.3.5 control with variable set-point.....................................................3.3.6 conventional true value[of a.quantity] .............................................3.2.11 A/D, D/A onverter...................................................................3.4.4.3 closed loop control.................................................................3.3.4critical flame......................................................................4.6.1.12D data................................................................................3.4.1.8data acquisition....................................................................3.4.5.3data acquisition station............................................................3.4.6.5 data base...........................................................................3.4.1.15data highway........................................................................3.4.1.12data processing.....................................................................3.4.5.4data record, data logging...........................................................3.4.5.5 dead band...........................................................................4.3.4.24 degree of protection................................................................4.8.13 design of thermal power plant automation........................................... 4.2 detecting device....................................................................3.2.21 deviation alarm.....................................................................4.5.3 diagnostic and test software........................................................4.9.15 differential expansion monitor......................................................4.6.2.3 digital electro-hydraulic control (DEH).............................................4.3.4.3 digital computer....................................................................3.4.1.2 digital input (DI)..................................................................3.4.3.1 digital output (DO).................................................................3.4.3.3 digital signal......................................................................3.4.2.2direct digital control (DDC)........................................................3.3.16 discontinuous control system........................................................3.3.19 display.............................................................................3.4.2.4display for window..................................................................3.4.2.13 display instrument..................................................................3.2.26CRT display.........................................................................3.4.5.14 distributed control system (DCS)....................................................3.4.6 droop...............................................................................4.3.4.23Eeddy current probe..................................................................4.6.2.9 electric automation.................................................................3.1.2 electric control building ..........................................................4.7.3 electric-net control room...........................................................4.7.7 electro-hydraulic control (EHC).....................................................4.3.4.2 electro-hydraulic converter........................................................ 4.3.4.19electronics room....................................................................4.7.8 elevation flame detection...........................................................4.6.1.10 emergency trip system (ETS).........................................................4.3.4.8 engineer station....................................................................3.4.4.11 error...............................................................................3.2.12error of indication.................................................................3.2.13Ffast cut back (FCB).................................................................4.6.4fast valving........................................................................4.3.4.18 fault...............................................................................3.5.6 feedforward control.................................................................3.3.7feed-water control..................................................................4.3.2.1 fiducial error..................................................................... 3.2.14 firmware............................................................................3.4.1.24first out...........................................................................4.5.5 flame...............................................................................4.6.1.4flame envelope......................................................................4.6.1.5flame detector......................................................................4.6.1.7fossil fired power plant simulator..................................................4.9.1 fuctional fidelity..................................................................4.9.5fuel control........................................................................4.3.2.5fuel trip...........................................................................4.6.1.3full furnace flame detection........................................................4.6.1.11full scope high realism simulator...................................................4.9.2 function group control..............................................................4.4.1.1 function key........................................................................3.4.4.5furnace pressure contro.............................................................4.3.2.3 furnace purge.......................................................................4.6.1.15 furnace safetyguard supervisory system (FSSS).......................................4.6.1 fuzzy control.......................................................................3.3.10Ggeneric simulator...................................................................4.9.4H hardware............................................................................3.4.1.23hard copy...........................................................................3.4.4.2historical trend display............................................................3.4.2.10Iindication [of a measuring instrument]..............................................3.2.9 indicator ˈindicating instrument ...................................................3.2.27 individual burner flame detection...................................................4.6.1.9 information.........................................................................3.4.1.9input device ˈinput unit............................................................3.4.3.7 input/output ˄I/O ˅.................................................................3.4.3input-output device, input-output unit..............................................3.4.3.9 input variable..................................................................... 3.2.5integrating instrument .............................................................3.2.29intelligent terminal................................................................3.4.1.18interface ......................................................................... 3.4.1.10interlock ......................................................................... 4.6.3interlock control ................................................................. 4.6.6intrinsic error ................................................................... 3.2.16instructor station................................................................. 4.9.8instructor station software ........................................................4.9.14 I/O interface eguipment ............................................................4.9.12 Kkeyboard............................................................................3.4.4.4keyphasor transducer .............................................................. 4.6.2.8Llocal areanetwork (LAN)............................................................ 3.4.1.14 life................................................................................3.5.5light pen...........................................................................4.4.8limit alarm.........................................................................4.5.2load control of ball mill ......................................................... 4.3.3.3 load governing......................................................................4.3.4.10load limit .........................................................................4.3.4.11local control...................................................................... 4.2.2local control room ................................................................ 4.7.5logic control ..................................................................... 3.3.14loss of all flame ................................................................. 4.6.1.8loss of flame to a corner ..........................................................6.1.13。
Native Instruments MASCHINE MK3 用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (25)1.1MASCHINE Documentation (26)1.2Document Conventions (27)1.3New Features in MASCHINE 2.8 (29)1.4New Features in MASCHINE 2.7.10 (31)1.5New Features in MASCHINE 2.7.8 (31)1.6New Features in MASCHINE 2.7.7 (32)1.7New Features in MASCHINE 2.7.4 (33)1.8New Features in MASCHINE 2.7.3 (36)2Quick Reference (38)2.1Using Your Controller (38)2.1.1Controller Modes and Mode Pinning (38)2.1.2Controlling the Software Views from Your Controller (40)2.2MASCHINE Project Overview (43)2.2.1Sound Content (44)2.2.2Arrangement (45)2.3MASCHINE Hardware Overview (48)2.3.1MASCHINE Hardware Overview (48)2.3.1.1Control Section (50)2.3.1.2Edit Section (53)2.3.1.3Performance Section (54)2.3.1.4Group Section (56)2.3.1.5Transport Section (56)2.3.1.6Pad Section (58)2.3.1.7Rear Panel (63)2.4MASCHINE Software Overview (65)2.4.1Header (66)2.4.2Browser (68)2.4.3Arranger (70)2.4.4Control Area (73)2.4.5Pattern Editor (74)3Basic Concepts (76)3.1Important Names and Concepts (76)3.2Adjusting the MASCHINE User Interface (79)3.2.1Adjusting the Size of the Interface (79)3.2.2Switching between Ideas View and Song View (80)3.2.3Showing/Hiding the Browser (81)3.2.4Showing/Hiding the Control Lane (81)3.3Common Operations (82)3.3.1Using the 4-Directional Push Encoder (82)3.3.2Pinning a Mode on the Controller (83)3.3.3Adjusting Volume, Swing, and Tempo (84)3.3.4Undo/Redo (87)3.3.5List Overlay for Selectors (89)3.3.6Zoom and Scroll Overlays (90)3.3.7Focusing on a Group or a Sound (91)3.3.8Switching Between the Master, Group, and Sound Level (96)3.3.9Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.973.3.9.1Extended Navigate Mode on Your Controller (102)3.3.10Navigating the Software Using the Controller (105)3.3.11Using Two or More Hardware Controllers (106)3.3.12Touch Auto-Write Option (108)3.4Native Kontrol Standard (110)3.5Stand-Alone and Plug-in Mode (111)3.5.1Differences between Stand-Alone and Plug-in Mode (112)3.5.2Switching Instances (113)3.5.3Controlling Various Instances with Different Controllers (114)3.6Host Integration (114)3.6.1Setting up Host Integration (115)3.6.1.1Setting up Ableton Live (macOS) (115)3.6.1.2Setting up Ableton Live (Windows) (116)3.6.1.3Setting up Apple Logic Pro X (116)3.6.2Integration with Ableton Live (117)3.6.3Integration with Apple Logic Pro X (119)3.7Preferences (120)3.7.1Preferences – General Page (121)3.7.2Preferences – Audio Page (126)3.7.3Preferences – MIDI Page (130)3.7.4Preferences – Default Page (133)3.7.5Preferences – Library Page (137)3.7.6Preferences – Plug-ins Page (145)3.7.7Preferences – Hardware Page (150)3.7.8Preferences – Colors Page (154)3.8Integrating MASCHINE into a MIDI Setup (156)3.8.1Connecting External MIDI Equipment (156)3.8.2Sync to External MIDI Clock (157)3.8.3Send MIDI Clock (158)3.9Syncing MASCHINE using Ableton Link (159)3.9.1Connecting to a Network (159)3.9.2Joining and Leaving a Link Session (159)3.10Using a Pedal with the MASCHINE Controller (160)3.11File Management on the MASCHINE Controller (161)4Browser (163)4.1Browser Basics (163)4.1.1The MASCHINE Library (163)4.1.2Browsing the Library vs. Browsing Your Hard Disks (164)4.2Searching and Loading Files from the Library (165)4.2.1Overview of the Library Pane (165)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (170)4.2.2.1[MK3] Browsing by Product Category Using the Controller (174)4.2.2.2[MK3] Browsing by Product Vendor Using the Controller (174)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (175)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (179)4.2.4Selecting a File Type (180)4.2.5Choosing Between Factory and User Content (181)4.2.6Selecting Type and Character Tags (182)4.2.7List and Tag Overlays in the Browser (186)4.2.8Performing a Text Search (188)4.2.9Loading a File from the Result List (188)4.3Additional Browsing Tools (193)4.3.1Loading the Selected Files Automatically (193)4.3.2Auditioning Instrument Presets (195)4.3.3Auditioning Samples (196)4.3.4Loading Groups with Patterns (197)4.3.5Loading Groups with Routing (198)4.3.6Displaying File Information (198)4.4Using Favorites in the Browser (199)4.5Editing the Files’ Tags and Properties (203)4.5.1Attribute Editor Basics (203)4.5.2The Bank Page (205)4.5.3The Types and Characters Pages (205)4.5.4The Properties Page (208)4.6Loading and Importing Files from Your File System (209)4.6.1Overview of the FILES Pane (209)4.6.2Using Favorites (211)4.6.3Using the Location Bar (212)4.6.4Navigating to Recent Locations (213)4.6.5Using the Result List (214)4.6.6Importing Files to the MASCHINE Library (217)4.7Locating Missing Samples (219)4.8Using Quick Browse (221)5Managing Sounds, Groups, and Your Project (225)5.1Overview of the Sounds, Groups, and Master (225)5.1.1The Sound, Group, and Master Channels (226)5.1.2Similarities and Differences in Handling Sounds and Groups (227)5.1.3Selecting Multiple Sounds or Groups (228)5.2Managing Sounds (233)5.2.1Loading Sounds (235)5.2.2Pre-listening to Sounds (236)5.2.3Renaming Sound Slots (237)5.2.4Changing the Sound’s Color (237)5.2.5Saving Sounds (239)5.2.6Copying and Pasting Sounds (241)5.2.7Moving Sounds (244)5.2.8Resetting Sound Slots (245)5.3Managing Groups (247)5.3.1Creating Groups (248)5.3.2Loading Groups (249)5.3.3Renaming Groups (251)5.3.4Changing the Group’s Color (251)5.3.5Saving Groups (253)5.3.6Copying and Pasting Groups (255)5.3.7Reordering Groups (258)5.3.8Deleting Groups (259)5.4Exporting MASCHINE Objects and Audio (260)5.4.1Saving a Group with its Samples (261)5.4.2Saving a Project with its Samples (262)5.4.3Exporting Audio (264)5.5Importing Third-Party File Formats (270)5.5.1Loading REX Files into Sound Slots (270)5.5.2Importing MPC Programs to Groups (271)6Playing on the Controller (275)6.1Adjusting the Pads (275)6.1.1The Pad View in the Software (275)6.1.2Choosing a Pad Input Mode (277)6.1.3Adjusting the Base Key (280)6.1.4Using Choke Groups (282)6.1.5Using Link Groups (284)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (286)6.3Playing Tools (287)6.3.1Mute and Solo (288)6.3.2Choke All Notes (292)6.3.3Groove (293)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (295)6.3.5Tap Tempo (299)6.4Performance Features (300)6.4.1Overview of the Perform Features (300)6.4.2Selecting a Scale and Creating Chords (303)6.4.3Scale and Chord Parameters (303)6.4.4Creating Arpeggios and Repeated Notes (316)6.4.5Swing on Note Repeat / Arp Output (321)6.5Using Lock Snapshots (322)6.5.1Creating a Lock Snapshot (322)6.5.2Using Extended Lock (323)6.5.3Updating a Lock Snapshot (323)6.5.4Recalling a Lock Snapshot (324)6.5.5Morphing Between Lock Snapshots (324)6.5.6Deleting a Lock Snapshot (325)6.5.7Triggering Lock Snapshots via MIDI (326)6.6Using the Smart Strip (327)6.6.1Pitch Mode (328)6.6.2Modulation Mode (328)6.6.3Perform Mode (328)6.6.4Notes Mode (329)7Working with Plug-ins (330)7.1Plug-in Overview (330)7.1.1Plug-in Basics (330)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (334)7.1.3Loading, Removing, and Replacing a Plug-in (335)7.1.3.1Browser Plug-in Slot Selection (341)7.1.4Adjusting the Plug-in Parameters (344)7.1.5Bypassing Plug-in Slots (344)7.1.6Using Side-Chain (346)7.1.7Moving Plug-ins (346)7.1.8Alternative: the Plug-in Strip (348)7.1.9Saving and Recalling Plug-in Presets (348)7.1.9.1Saving Plug-in Presets (349)7.1.9.2Recalling Plug-in Presets (350)7.1.9.3Removing a Default Plug-in Preset (351)7.2The Sampler Plug-in (352)7.2.1Page 1: Voice Settings / Engine (354)7.2.2Page 2: Pitch / Envelope (356)7.2.3Page 3: FX / Filter (359)7.2.4Page 4: Modulation (361)7.2.5Page 5: LFO (363)7.2.6Page 6: Velocity / Modwheel (365)7.3Using Native Instruments and External Plug-ins (367)7.3.1Opening/Closing Plug-in Windows (367)7.3.2Using the VST/AU Plug-in Parameters (370)7.3.3Setting Up Your Own Parameter Pages (371)7.3.4Using VST/AU Plug-in Presets (376)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (378)8Using the Audio Plug-in (380)8.1Loading a Loop into the Audio Plug-in (384)8.2Editing Audio in the Audio Plug-in (385)8.3Using Loop Mode (386)8.4Using Gate Mode (388)9Using the Drumsynths (390)9.1Drumsynths – General Handling (391)9.1.1Engines: Many Different Drums per Drumsynth (391)9.1.2Common Parameter Organization (391)9.1.3Shared Parameters (394)9.1.4Various Velocity Responses (394)9.1.5Pitch Range, Tuning, and MIDI Notes (394)9.2The Kicks (395)9.2.1Kick – Sub (397)9.2.2Kick – Tronic (399)9.2.3Kick – Dusty (402)9.2.4Kick – Grit (403)9.2.5Kick – Rasper (406)9.2.6Kick – Snappy (407)9.2.7Kick – Bold (409)9.2.8Kick – Maple (411)9.2.9Kick – Push (412)9.3The Snares (414)9.3.1Snare – Volt (416)9.3.2Snare – Bit (418)9.3.3Snare – Pow (420)9.3.4Snare – Sharp (421)9.3.5Snare – Airy (423)9.3.6Snare – Vintage (425)9.3.7Snare – Chrome (427)9.3.8Snare – Iron (429)9.3.9Snare – Clap (431)9.3.10Snare – Breaker (433)9.4The Hi-hats (435)9.4.1Hi-hat – Silver (436)9.4.2Hi-hat – Circuit (438)9.4.3Hi-hat – Memory (440)9.4.4Hi-hat – Hybrid (442)9.4.5Creating a Pattern with Closed and Open Hi-hats (444)9.5The Toms (445)9.5.1Tom – Tronic (447)9.5.2Tom – Fractal (449)9.5.3Tom – Floor (453)9.5.4Tom – High (455)9.6The Percussions (456)9.6.1Percussion – Fractal (458)9.6.2Percussion – Kettle (461)9.6.3Percussion – Shaker (463)9.7The Cymbals (467)9.7.1Cymbal – Crash (469)9.7.2Cymbal – Ride (471)10Using the Bass Synth (474)10.1Bass Synth – General Handling (475)10.1.1Parameter Organization (475)10.1.2Bass Synth Parameters (477)11Working with Patterns (479)11.1Pattern Basics (479)11.1.1Pattern Editor Overview (480)11.1.2Navigating the Event Area (486)11.1.3Following the Playback Position in the Pattern (488)11.1.4Jumping to Another Playback Position in the Pattern (489)11.1.5Group View and Keyboard View (491)11.1.6Adjusting the Arrange Grid and the Pattern Length (493)11.1.7Adjusting the Step Grid and the Nudge Grid (497)11.2Recording Patterns in Real Time (501)11.2.1Recording Your Patterns Live (501)11.2.2The Record Prepare Mode (504)11.2.3Using the Metronome (505)11.2.4Recording with Count-in (506)11.2.5Quantizing while Recording (508)11.3Recording Patterns with the Step Sequencer (508)11.3.1Step Mode Basics (508)11.3.2Editing Events in Step Mode (511)11.3.3Recording Modulation in Step Mode (513)11.4Editing Events (514)11.4.1Editing Events with the Mouse: an Overview (514)11.4.2Creating Events/Notes (517)11.4.3Selecting Events/Notes (518)11.4.4Editing Selected Events/Notes (526)11.4.5Deleting Events/Notes (532)11.4.6Cut, Copy, and Paste Events/Notes (535)11.4.7Quantizing Events/Notes (538)11.4.8Quantization While Playing (540)11.4.9Doubling a Pattern (541)11.4.10Adding Variation to Patterns (541)11.5Recording and Editing Modulation (546)11.5.1Which Parameters Are Modulatable? (547)11.5.2Recording Modulation (548)11.5.3Creating and Editing Modulation in the Control Lane (550)11.6Creating MIDI Tracks from Scratch in MASCHINE (555)11.7Managing Patterns (557)11.7.1The Pattern Manager and Pattern Mode (558)11.7.2Selecting Patterns and Pattern Banks (560)11.7.3Creating Patterns (563)11.7.4Deleting Patterns (565)11.7.5Creating and Deleting Pattern Banks (566)11.7.6Naming Patterns (568)11.7.7Changing the Pattern’s Color (570)11.7.8Duplicating, Copying, and Pasting Patterns (571)11.7.9Moving Patterns (574)11.7.10Adjusting Pattern Length in Fine Increments (575)11.8Importing/Exporting Audio and MIDI to/from Patterns (576)11.8.1Exporting Audio from Patterns (576)11.8.2Exporting MIDI from Patterns (577)11.8.3Importing MIDI to Patterns (580)12Audio Routing, Remote Control, and Macro Controls (589)12.1Audio Routing in MASCHINE (590)12.1.1Sending External Audio to Sounds (591)12.1.2Configuring the Main Output of Sounds and Groups (596)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (601)12.1.4Configuring the Master and Cue Outputs of MASCHINE (605)12.1.5Mono Audio Inputs (610)12.1.5.1Configuring External Inputs for Sounds in Mix View (611)12.2Using MIDI Control and Host Automation (614)12.2.1Triggering Sounds via MIDI Notes (615)12.2.2Triggering Scenes via MIDI (622)12.2.3Controlling Parameters via MIDI and Host Automation (623)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (631)12.2.5Sending MIDI from Sounds (632)12.3Creating Custom Sets of Parameters with the Macro Controls (636)12.3.1Macro Control Overview (637)12.3.2Assigning Macro Controls Using the Software (638)12.3.3Assigning Macro Controls Using the Controller (644)13Controlling Your Mix (646)13.1Mix View Basics (646)13.1.1Switching between Arrange View and Mix View (646)13.1.2Mix View Elements (647)13.2The Mixer (649)13.2.1Displaying Groups vs. Displaying Sounds (650)13.2.2Adjusting the Mixer Layout (652)13.2.3Selecting Channel Strips (653)13.2.4Managing Your Channels in the Mixer (654)13.2.5Adjusting Settings in the Channel Strips (656)13.2.6Using the Cue Bus (660)13.3The Plug-in Chain (662)13.4The Plug-in Strip (663)13.4.1The Plug-in Header (665)13.4.2Panels for Drumsynths and Internal Effects (667)13.4.3Panel for the Sampler (668)13.4.4Custom Panels for Native Instruments Plug-ins (671)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (675)13.5Controlling Your Mix from the Controller (677)13.5.1Navigating Your Channels in Mix Mode (678)13.5.2Adjusting the Level and Pan in Mix Mode (679)13.5.3Mute and Solo in Mix Mode (680)13.5.4Plug-in Icons in Mix Mode (680)14Using Effects (681)14.1Applying Effects to a Sound, a Group or the Master (681)14.1.1Adding an Effect (681)14.1.2Other Operations on Effects (690)14.1.3Using the Side-Chain Input (692)14.2Applying Effects to External Audio (695)14.2.1Step 1: Configure MASCHINE Audio Inputs (695)14.2.2Step 2: Set up a Sound to Receive the External Input (698)14.2.3Step 3: Load an Effect to Process an Input (700)14.3Creating a Send Effect (701)14.3.1Step 1: Set Up a Sound or Group as Send Effect (702)14.3.2Step 2: Route Audio to the Send Effect (706)14.3.3 A Few Notes on Send Effects (708)14.4Creating Multi-Effects (709)15Effect Reference (712)15.1Dynamics (713)15.1.1Compressor (713)15.1.2Gate (717)15.1.3Transient Master (721)15.1.4Limiter (723)15.1.5Maximizer (727)15.2Filtering Effects (730)15.2.1EQ (730)15.2.2Filter (733)15.2.3Cabinet (737)15.3Modulation Effects (738)15.3.1Chorus (738)15.3.2Flanger (740)15.3.3FM (742)15.3.4Freq Shifter (743)15.3.5Phaser (745)15.4Spatial and Reverb Effects (747)15.4.1Ice (747)15.4.2Metaverb (749)15.4.3Reflex (750)15.4.4Reverb (Legacy) (752)15.4.5Reverb (754)15.4.5.1Reverb Room (754)15.4.5.2Reverb Hall (757)15.4.5.3Plate Reverb (760)15.5Delays (762)15.5.1Beat Delay (762)15.5.2Grain Delay (765)15.5.3Grain Stretch (767)15.5.4Resochord (769)15.6Distortion Effects (771)15.6.1Distortion (771)15.6.2Lofi (774)15.6.3Saturator (775)15.7Perform FX (779)15.7.1Filter (780)15.7.2Flanger (782)15.7.3Burst Echo (785)15.7.4Reso Echo (787)15.7.5Ring (790)15.7.6Stutter (792)15.7.7Tremolo (795)15.7.8Scratcher (798)16Working with the Arranger (801)16.1Arranger Basics (801)16.1.1Navigating Song View (804)16.1.2Following the Playback Position in Your Project (806)16.1.3Performing with Scenes and Sections using the Pads (807)16.2Using Ideas View (811)16.2.1Scene Overview (811)16.2.2Creating Scenes (813)16.2.3Assigning and Removing Patterns (813)16.2.4Selecting Scenes (817)16.2.5Deleting Scenes (818)16.2.6Creating and Deleting Scene Banks (820)16.2.7Clearing Scenes (820)16.2.8Duplicating Scenes (821)16.2.9Reordering Scenes (822)16.2.10Making Scenes Unique (824)16.2.11Appending Scenes to Arrangement (825)16.2.12Naming Scenes (826)16.2.13Changing the Color of a Scene (827)16.3Using Song View (828)16.3.1Section Management Overview (828)16.3.2Creating Sections (833)16.3.3Assigning a Scene to a Section (834)16.3.4Selecting Sections and Section Banks (835)16.3.5Reorganizing Sections (839)16.3.6Adjusting the Length of a Section (840)16.3.6.1Adjusting the Length of a Section Using the Software (841)16.3.6.2Adjusting the Length of a Section Using the Controller (843)16.3.7Clearing a Pattern in Song View (843)16.3.8Duplicating Sections (844)16.3.8.1Making Sections Unique (845)16.3.9Removing Sections (846)16.3.10Renaming Scenes (848)16.3.11Clearing Sections (849)16.3.12Creating and Deleting Section Banks (850)16.3.13Working with Patterns in Song view (850)16.3.13.1Creating a Pattern in Song View (850)16.3.13.2Selecting a Pattern in Song View (850)16.3.13.3Clearing a Pattern in Song View (851)16.3.13.4Renaming a Pattern in Song View (851)16.3.13.5Coloring a Pattern in Song View (851)16.3.13.6Removing a Pattern in Song View (852)16.3.13.7Duplicating a Pattern in Song View (852)16.3.14Enabling Auto Length (852)16.3.15Looping (853)16.3.15.1Setting the Loop Range in the Software (854)16.4Playing with Sections (855)16.4.1Jumping to another Playback Position in Your Project (855)16.5Triggering Sections or Scenes via MIDI (856)16.6The Arrange Grid (858)16.7Quick Grid (860)17Sampling and Sample Mapping (862)17.1Opening the Sample Editor (862)17.2Recording Audio (863)17.2.1Opening the Record Page (863)17.2.2Selecting the Source and the Recording Mode (865)17.2.3Arming, Starting, and Stopping the Recording (868)17.2.5Using the Footswitch for Recording Audio (871)17.2.6Checking Your Recordings (872)17.2.7Location and Name of Your Recorded Samples (876)17.3Editing a Sample (876)17.3.1Using the Edit Page (877)17.3.2Audio Editing Functions (882)17.4Slicing a Sample (890)17.4.1Opening the Slice Page (891)17.4.2Adjusting the Slicing Settings (893)17.4.3Live Slicing (898)17.4.3.1Live Slicing Using the Controller (898)17.4.3.2Delete All Slices (899)17.4.4Manually Adjusting Your Slices (899)17.4.5Applying the Slicing (906)17.5Mapping Samples to Zones (912)17.5.1Opening the Zone Page (912)17.5.2Zone Page Overview (913)17.5.3Selecting and Managing Zones in the Zone List (915)17.5.4Selecting and Editing Zones in the Map View (920)17.5.5Editing Zones in the Sample View (924)17.5.6Adjusting the Zone Settings (927)17.5.7Adding Samples to the Sample Map (934)18Appendix: Tips for Playing Live (937)18.1Preparations (937)18.1.1Focus on the Hardware (937)18.1.2Customize the Pads of the Hardware (937)18.1.3Check Your CPU Power Before Playing (937)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (938)18.1.5Consider Using a Limiter on Your Master (938)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (938)18.1.7Improvise (938)18.2Basic Techniques (938)18.2.1Use Mute and Solo (938)18.2.2Use Scene Mode and Tweak the Loop Range (939)18.2.3Create Variations of Your Drum Patterns in the Step Sequencer (939)18.2.4Use Note Repeat (939)18.2.5Set Up Your Own Multi-effect Groups and Automate Them (939)18.3Special Tricks (940)18.3.1Changing Pattern Length for Variation (940)18.3.2Using Loops to Cycle Through Samples (940)18.3.3Using Loops to Cycle Through Samples (940)18.3.4Load Long Audio Files and Play with the Start Point (940)19Troubleshooting (941)19.1Knowledge Base (941)19.2Technical Support (941)19.3Registration Support (942)19.4User Forum (942)20Glossary (943)Index (951)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE Getting Started: This document provides a practical approach to MASCHINE viaa set of tutorials covering easy and more advanced tasks in order to help you familiarizeyourself with MASCHINE.2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:▪Controller Editor Manual: Besides using your MASCHINE hardware controller together withits dedicated MASCHINE software, you can also use it as a powerful and highly versatileMIDI controller to pilot any other MIDI-capable application or device. This is made possibleby the Controller Editor software, an application that allows you to precisely define all MIDIassignments for your MASCHINE controller. The Controller Editor was installed during theMASCHINE installation procedure. For more information on this, please refer to the Con-troller Editor Manual available as a PDF file via the Help menu of Controller Editor.▪Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues. The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information can be expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software and paths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in the software is printed in blue. Whenever you see this formatting applied, you will find the same text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you see this formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you see this formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.Unlabeled Buttons on the ControllerThe buttons and knobs above and below the displays on your MASCHINE controller do not have labels.。
占领空间和空置传感器技术数据手册说明书

Value PropositionOccupancy and vacancy sensors are one of the first lines of defense in eliminating energy waste and complying with energy and building code requirements. Sensors deliver one of the most simple lighting control strategies to implement with immediate returns. PIR sensors are a low cost solution for meeting the latest energy requirements, and great for new or retrofit applications.Smart Wallbox Sensors provide a simple sensing and dimming or switching control solution for easy energysavings, local control, and code compliance. Engineered for easy configuration with an out-of-the-box default mode, pushbutton configuration for common room settings, and aSmart Sensor App to enable and configure additionalcapabilities. Designed with the latest pyroelectric technology that accurately detects minor motion up to 400sq ft and major motion up to 1,100 sq ft.*Target Applications• Spaces less than 1,100 SF • Offices• Meeting rooms •LobbiesSmart Wallbox SensorsObjectionsNOT INTERESTED / DON’T NEED IT• I’m really not interested in installing sensors. Do I really need them?• Find out what solution they’re currently utilizing for energy savings, what they like and don’t like about it, and reinforce key selling points. TOO EXPENSIVE / NO BUDGET• I just want a simple, inexpensive sensor to meet the code requirements. I don’t need anything fancy.• Break down pricing so they understand the value of what they would be receiving. FEATURE SET / CODE COMPLIANCE• Will this sensor meet our local energy code requirements?• Smart Wallbox Sensors can be used to comply with IECC, ASHRAE 90.1, and 2019 Title 24, Part 6 occupancy/vacancy sensing, dimming, and manual-ON/auto-OFF requirements• I don’t want to have to pull out my phone to program every sensor I install.• Smart Wallbox Sensors can also be programmedusing the out-of-the box default setting or convenient pushbutton programming for eight common room settings.ResourcesAvailable at /smartsensors • Data Sheets • Solution Sheets • Flyer• Video: Introducing Smart Wallbox Sensors • Videos: Easy Programming and ConfigurationFeaturesINCREASED FUNCTIONALITY WITH LESS COMPLEXITY • Can be used to comply with IECC, ASHRAE 90.1, and 2019 Title 24, Part 6 occupancy/vacancy sensing, dimming, and manual-ON/auto-OFF requirements • Easy configuration• Out-of-the-box default operation:• Auto-ON/Auto-OFF • 10-minute timeout • Sensitivity set to 75%• Pushbutton configuration for eight common room settings• Smart Sensor App:• Select the operating mode for:• Occupancy (auto-ON/auto-OFF) • Vacancy (manual-ON/auto-OFF)• Adjust sensitivity and timeouts• Set up partial-ON and partial-OFF levels and partial-OFF timeouts (dimming models only)• Enable the integrated photocell for daylighting hold-OFF• Enable the nightlight and customize the nightlight color• Integrated photocell for daylighting hold-OFF• Add a Power Pack and Controlled Receptacles for plug load control• Use the Leviton Push to Pair (P2P) process to create a multi-way system for up to 5 devices• Antimicrobial treated plastic inhibits the growth of mold, mildew, fungus and odor-causing bacteria that cause discoloration, staining, deterioration or corrosion on the surface of the device in between normal cleanings• Latest PIR technology accurately detects minor motion up to 400sq ft and major motion up to 1,100 sq ft • Tamper resistant PIR lens • Non-neutral models availableCustomer Needs• Quick and simple solution for energy savings • Energy code compliance• Low cost wallbox sensor solution for automatic shut-off, manual space control and receptacle control • Flexible, touchless lighting controlCustomer BenefitsINCREASE ENERGY SAVINGS• Installing occupancy sensors typically result in 30 to 46% in energy savings; the combination of a photocell with ambient light hold-OFF capabilities, self-adjusting sensitivity and time delay features, and walk through features delivers 46% energy savings SIMPLIFY CODE COMPLIANCE• Can be used to comply with IECC, ASHRAE 90.1, and 2019 Title 24, Part 6 occupancy/vacancy sensing, dimming, and manual-ON/auto-OFF requirements OPTIMIZE SPACE FUNCTIONALITY AND IMPROVE THE COMFORT OF A SPACE FOR OCCUPANTS TO WORK OR LEARN• Add flexible touchless lighting control to automatically turn the lights on or off based on occupancy as well as dimming capabilities and additional strategies to save energy or take advantage of natural daylight—partial-ON, partial-OFF, daylighting hold-OFF, and more• Antimicrobial models to support cleaning protocols in commercial spacesQuestions to AskCOMMERCIAL DEVICES REQUIRED IN NON-RESIDENTIAL APPLICATIONS• Why do I need to install commercial sensors in commercial applications?• Ensure high quality installations and reduce callbacks by using the right sensors in the right applications. Install commercial grade sensors in commercial applications.• Meet non-residential energy code compliance for IECC, ASHRAE 90.1, and 2019 Title 24, Part 6• Occupancy (auto-ON/auto-OFF) and vacancy (manual-ON/auto-OFF) operation • Timeouts for auto-OFF requirements• Partial-ON, partial-OFF (dimming models only)• Daylighting hold-OFF • Receptacle control• Use higher input voltage and ratings to meet commercial requirements• Install antimicrobial devices to support cleaning protocols in commercial spaces SENSOR APPLICATIONS• What challenges are you having with (selling / installing / specifying) sensors for standalone applications?• What lighting control problem or challenge are you trying to solve? ENERGY SAVINGS• What pitch is your team using to sell energy saving controls to their customers?• What solution are you currently stocking / installing / specifying? What would make you switch to Leviton?FEATURES AND COMPLIANCE• What do you need (must have / nice to have) your lighting controls to do?• Would it be helpful if you could (stock / install / specify) asensor that met all requirements?ODD10-IDx/ODD24-IDW/ ODP10-I1xSmart Dimming Wallbox SensorsODS15-IDx/ODS15-GDx/ODS15-I1xSmart Wallbox SensorsLeviton Manufacturing Co., Inc. Global Headquarters201 North Service Road, Melville, NY 11747 tel 800-323-8920 tech line (8:30AM-7:30PM ET Mon-Fri) 800-824-3005Visit our website at: /smartsensors©2021 Leviton Manufacturing Co. Inc. All rights reserved. Subject to change without notice.LES-G-10587C/I21-cdsREV SEP 2021。
A New Approach for Filtering Nonlinear Systems

computational overhead as the number of calculations demanded for the generation of the Jacobian and the predictions of state estimate and covariance are large. In this paper we describe a new approach to generalising the Kalman filter to systems with nonlinear state transition and observation models. In Section 2 we describe the basic filtering problem and the notation used in this paper. In Section 3 we describe the new filter. The fourth section presents a summary of the theoretical analysis of the performance of the new filter against that of the EKF. In Section 5 we demonstrate the new filter in a highly nonlinear application and we conclude with a discussion of the implications of this new filter1
Tቤተ መጻሕፍቲ ባይዱ
= = =
δij Q(i), δij R(i), 0, ∀i, j.
(3) (4) (5)
汽车配件说明书

Indicators................................ 131 Shift Lever Positions ................. 131 Shift Lock Release..................... 134
Robust Control
Robust ControlRobust control is a critical concept in the field of engineering and control systems. It refers to the ability of a control system to maintain stable and satisfactory performance in the presence of various kinds of uncertainties and disturbances. In other words, a robust control system should be able to adapt and respond effectively to changes and unexpected factors, ensuring reliable and consistent operation. This is particularly important in applications where the consequences of system failure can be severe, such as in aerospace, automotive,and industrial automation. One of the key challenges in robust control is dealing with uncertainties. These uncertainties can arise from various sources, including variations in system parameters, external disturbances, and measurement inaccuracies. Traditional control methods often rely on precise mathematical models of the system, which may not fully capture these uncertainties. As a result, the control system may become fragile and prone to instability when faced withreal-world conditions. Robust control techniques aim to address this issue by explicitly accounting for uncertainties and designing controllers that can accommodate them. One approach to robust control is the use of H-infinity control, which is based on the concept of optimal control with a performance criterion of minimizing the effect of disturbances on the system. H-infinity control has been widely studied and applied in various engineering fields due to its ability to provide robust performance guarantees. By formulating the control problem in the framework of H-infinity optimization, engineers can design controllers that are robust to uncertainties and disturbances, ensuring stable and reliable system operation. Another important aspect of robust control is the consideration of stability and performance trade-offs. In many practical applications, there is a trade-off between the robustness of the control system and its performance interms of speed, accuracy, and responsiveness. For example, increasing the robustness of a control system may require sacrificing some performance metrics, while improving performance may make the system more susceptible to uncertainties. Engineers must carefully balance these trade-offs to design control systems that meet the specific requirements of the application. In addition to H-infinity control, other robust control techniques include mu-synthesis, loop shaping, androbust model predictive control. These techniques provide different tools and methodologies for addressing robustness and performance trade-offs in control system design. For example, mu-synthesis is based on the idea of shaping the sensitivity functions of the system to achieve robust performance, while loop shaping focuses on designing the frequency response of the system to meet robustness and performance specifications. Furthermore, the increasing complexity of modern control systems, such as networked control systems and cyber-physical systems, poses new challenges for robust control. These systems often involve distributed and interconnected components, as well as communication andcomputation constraints, which can introduce additional uncertainties and dynamics. Addressing robustness in such systems requires interdisciplinary approaches that integrate control theory, communication theory, and computer science, among others. In conclusion, robust control is a crucial aspect of control system design, particularly in applications where uncertainties and disturbances are prevalent. Engineers must leverage various robust control techniques, such as H-infinity control, mu-synthesis, and loop shaping, to ensure stable and reliable system operation while balancing performance trade-offs. As technology continues to advance, the development of robust control methods for complex and interconnected systems will remain a key area of research and innovation in the field of control engineering.。
富士达电梯故障代码
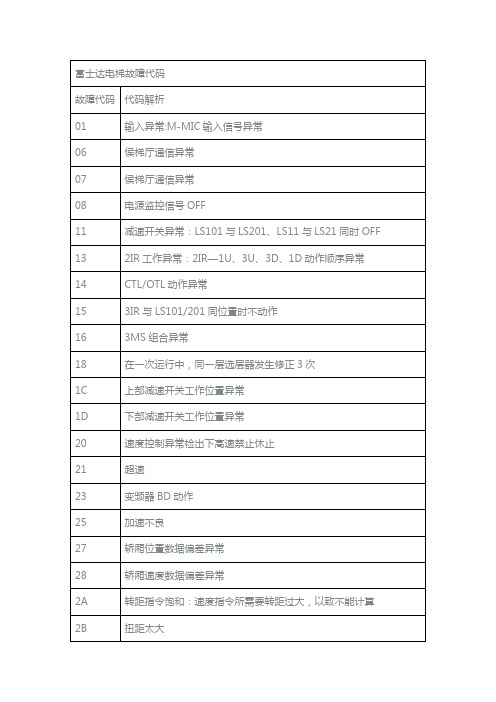
在安装富士达电梯时动慢车有时会发生故障造成电梯慢车不运行1、电机不得电——#36不吸合--#1E -—未吸合造成2、电机得电但不开闸-—抱闸检测回路断开-—故障6 系3、电机得电但开闸不走——抱闸检测回路不断开-- 故障6 系4、电梯在机房可以走慢车在轿顶不运行-—防撞头开工未封、轿顶通讯不良呼叫记录开始:按动上按钮,同时将EQDO 开关切到ON ,然后放开.实行:按动上按钮,上面的一层(按住2 秒以上,顶层)即被预约。
按动下按钮,下面的一层(按住2 秒以上,底层)即被预约。
按住中按钮,以上被预约的楼层即被记录下来。
保持按住中按钮,门将被关闭。
结束:将EQDO 开关切到OFF .安装运行开始:将轿顶、轿内的自动/ 手动开关均切换到自动位。
按住下按钮,同时将EQDO 开关切到ON ,然后放开按钮。
运转:按动上按钮,轿厢慢车向上。
按动下按钮,轿厢慢车向下。
结束:将EQDO 开关切到OFF 。
楼层选择器的错开开始:按住上按钮,同时将EQDO 开关切到ON ,然后放开按钮实行:按动上按钮,上面的一层(按住2 秒以上,顶层)即被预约。
按动下按钮,下面的一层(按住2 秒以上,底层)即被预约。
按住中按钮,以上被预约的楼层上的选择器即错开。
结束:将EQDO 开关切到OFF在“呼叫记录”,“楼层选择器的错开”的实行过程中,所记录的呼叫楼层和选择器错开的楼层将会在LED 的bit0~bit7 上以2 进制数显示出来.(操作开始之初显示的是当时轿厢所处的楼层)bit 7 □□□□□□□□□□□□bit 6 □□□□□□□□□□□□bit 5 □□□□□□□□□□□□bit 4 □□□□□□□□□□□□bit 3 □□□□□□□■■■■■bit 2 □□□■■■■□□□□■bit 1 □■■□□■■□□■■□bit 0 ■□■□■□■□■□■□表示-—1——2——3--4--5—-6--7—-8-—9-—10-11—12 ……平常表示【SEL=0 数据=0 】时LED 的显示灯亮高速闪动低速闪动熄灭Bit7有项目代码—-————无项目代码Bit6地震时管制运行火灾时,自备电,漏水时的管制停车运转平常Bit5与IF61 ,IF66 通信断开——-——-与IF61 ,IF66 通信正常Bit4与SV ,其它号机通信断开与SV ( MAIN )通信断开-—-与SV ,其它号机通信正常Bit3与COB/ 候梯厅电脑通信断开———*6与COB/ 候梯厅电脑通信正常Bit2启动禁止高速运转禁止高速运转可能Bit1门关闭完成位置门中间位置---门打开完成位置Bit0门区内——-—-—富士达电梯控制屏操作方法E411中文翻译( 故障灯)1.DZ或ADZ 与MCSS的命令状态不一致2。
JUMO温度控制器说明书
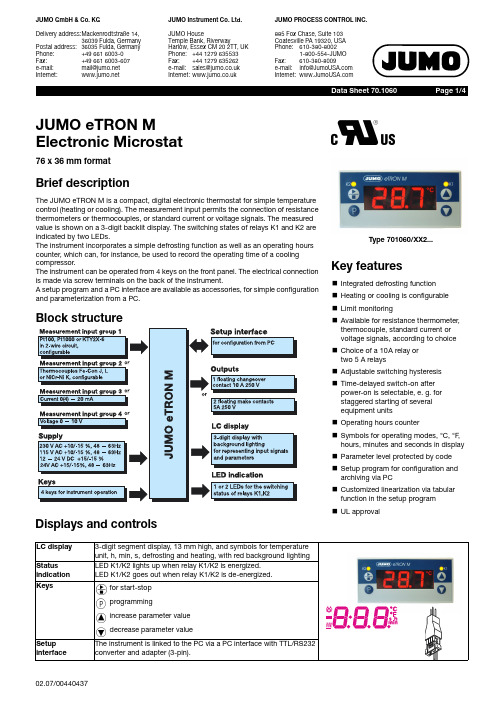
Page 1/4JUMO GmbH & Co. KGDelivery address:Mackenrodtstraße 14,36039 Fulda, GermanyPostal address:36035 Fulda, Germany Phone:+49 661 6003-0Fax:+49 661 6003-607e-mail:*************Internet:JUMO Instrument Co. Ltd.JUMO HouseTemple Bank, RiverwayHarlow, Essex CM 20 2TT, UK Phone:+44 1279 635533Fax:+44 1279 635262e-mail:*************.uk Internet:JUMO PROCESS CONTROL INC.885 Fox Chase, Suite 103Coatesville PA 19320, USA Phone:610-380-80021-800-554-JUMOFax:610-380-8009e-mail:****************Internet:Block structureKey featuresk Integrated defrosting function k Heating or cooling is configurable k Limit monitoringk Available for resistance thermometer, thermocouple, standard current or voltage signals, according to choice k Choice of a 10A relay or two 5 A relays k Adjustable switching hysteresis k Time-delayed switch-on after power-on is selectable, e. g. for staggered starting of several equipment units k Operating hours counterk Symbols for operating modes, °C, °F , hours, minutes and seconds in display k Parameter level protected by code k Setup program for configuration and archiving via PC k Customized linearization via tabular function in the setup program k UL approvalJUMO eTRON M Electronic Microstat76 x 36 mm formatBrief descriptionThe JUMO eTRON M is a compact, digital electronic thermostat for simple temperature control (heating or cooling). The measurement input permits the connection of resistance thermometers or thermocouples, or standard current or voltage signals. The measured value is shown on a 3-digit backlit display. The switching states of relays K1 and K2 are indicated by two LEDs.The instrument incorporates a simple defrosting function as well as an operating hours counter, which can, for instance, be used to record the operating time of a cooling compressor.The instrument can be operated from 4 keys on the front panel. The electrical connection is made via screw terminals on the back of the instrument.A setup program and a PC interface are available as accessories, for simple configurationand parameterization from a PC.Type 701060/XX2...Displays and controlsfor start-stop programmingincrease parameter value decrease parameter valueThe instrument is linked to the PC via a PC interface with TTL/RS232 converter and adapter (3-pin).Technical dataAdditional dataAmbient conditionsOutputSupplyHousingAmbient temperature range 0to +50°C, with side-by-side mounting: 0to +40°CStorage temperature range -40to +70°CClimatic conditions≤75% rel. humidity, no condensationCleaning and care of front panelThe front panel can be cleaned with all the usual cleaning and rinsing agents.Do not use solvents such as methylated spirit, white spirit, P1 or xylene!1 relay (changeover contact)for Type 701060/XX1-XX 150,000 operations at 10A 250V AC 50Hz resistive load2 relays (make contacts)for Type 701060/XX2-XX100,000 operations at 5A 250V AC, 50Hz resistive loadSupply voltage 230V AC +10/-15%, 48—63Hz or 115V AC +10/-15%, 48—63Hz (isolated from measurement input)12—24V DC +15/-15%, 24V AC +15/-15%, 48—63Hz (not isolated from measurement input)Power consumption<3VAMaterial polycarbonateMountingin panel cut-out with bezel sealOperating position unrestricted Weight approx. 160g Protectionfront IP65, rear IP20Flammability class UL 94 V0Electrical dataConnection diagramType 701060/XX1-31: Measurement input and supply voltage Type 701060/XX2-31: Measurement input and supply voltage are not isolated from eacht other!DimensionsType 701060/XX2-XXData backup EEPROMConnectionvia screw terminals for wire cross-section up to 4 mm 2 solid wireand 2.5 mm 2 stranded wire Electromagnetic compatibility interference emission immunity to interference product family standard: EN 61326Class Bto industrial requirementsOperating conditions The instrument is designed as a panel-mounting unit.Electrical safetyto EN 61010, Part 1overvoltage category III, pollution degree 2Timing functionsOrder details(1) Basic version 701060/JUMO eTRON M(2) Basic type extension Version8factory-set, configurable within the measurement input group9configured to customer specification Measurement input group 11Pt100 in 2-wire circuit Pt1000 in 2-wire circuit KTY2X-62Fe-Con J Fe-Con L NiCr-Ni K 30—20mA 4—20mA 40—10VNumber of relays1 1 changeover contact 10A 250V2 2 make contacts 5A 250V (3) Supply02230V AC +10/-15% 48—63Hz 05115V AC +10/-15% 48—63Hz 3112—24V DC +15/-15% /24V AC +15/-15%, 48—63Hz (4) Approvals 000none061Underwriters Laboratories Inc. (UL)(1)(2)(3)(4)Order code / - -Order example 701060/811-02-061factory-set1.) It is not possible to switch from one meas. input group to anotherSuitable transducers can be found in these data sheets:- 90.2005 Push-in resistance thermometers - 90.2105 Screw-in resistance thermometers- 90.1002 and subsequent ones for screw-in thermocouples - 90.1101 and subsequent ones for push-in thermocouples - 90.1221 Mineral-insulated thermocouplesAccessoriesSetup program, multilingualPC interface with TTL /RS232C converter and adapter (pins)。
大金 1.5匹 壁挂式空调 使用说明书

EspañolFrançaisEnglish AIR CONDITIONERWall Mounted TypeOPERATING MANUALBefore using this product, read these instructions thoroughly and keep this manual for future reference. Safety PrecautionsTo prevent personal injury to others, or property damage, read this section carefully before you use this product, and be sure to comply to thefollowing safety precautions.Incorrect operation due to failure to follow the instructions may cause harm or damage, the seriousness of which is classifi ed as follows:ContentsSafety Precautions ..........................................................En-1Indoor Unit Overview and Operations .............................En-2Remote Controller Overview and Operations ..................En-3Timer Operation...............................................................En-5General Informations on Operation .................................En-6Cleaning and Care...........................................................En-6Troubleshooting ...............................................................En-8shut completely. Incomplete closing might have an effect on theproper working or performance of the product.occurs.*:To stop forced cooling, press this button or START/STOP button onthe remote controller.Each time you press SET button on the remote controller, the angleof the vertical airfl ow direction louver moves as follows:1*: Default setting in each mode.• Do not adjust by hand.• At the beginning of AUTO or HEAT mode, they may stay position 1for a while for adjustment.• If you set the angle to position 4–7 for more than 30 minutes inCOOL or DRY mode, they automatically return to position 3.In COOL or DRY mode, if the angle is set to position 4–7 for many hours,condensation may be formed, and the drips may wet your property.fl ow direction louver,the angle of the power diffuser moves as follows:• In SWING operation, power diffuser does not move.Lights in TIMER operation, and blinks slowly when the timer settingerror is detected.As for the timer setting error, refer to “Auto-restart function” on page 6.operation.Adjust two knobs by hand.fi lters resist mildew growth.fl ow. Indoor Unit Overview and OperationsAIR CONDITIONER Wall Mounted Type Remote Controller Overview and OperationsYou can quickly start the operation with following 3 steps:Notes in HEAT mode:• At the beginning of the operation, the indoor unit operates at verylow fan speed for about 3–5 minutes for preparation, and thenswitches to the selected fan speed.• Automatic defrosting operation overrides the heating operation whenit is necessary.In COOL/DRY mode, the value needs to be set at lower temperaturethan current room temperature, and in HEAT mode, the value needsto be set at higher temperature than current room temperature.Otherwise, corresponding operation mode does not start to work.*:Temperature control is not available in FAN mode.In actual operation, the display is linked with the button operation, andonly shows the necessary indicators for each setting.(continued)when you want to quickly cool down or warm up the room.When you press the button to start the POWERFUL operation, the indoor unit emits 3 short beeps.POWERFUL operation is automatically turned off in the following situations:• Adjusted room temperature reached to the de fi ned temperature in temperature setting in COOL, DRY, or HEAT mode.• 20 minutes have passed after fi nishing the POWERFUL operation mode setting.It is not turned off automatically during setting of the POWERFUL operation.Notes:• The air fl ow direction and the fan speed are controlled automatically.• This operation cannot be performed simultaneously with ECONOMY operation.To return to normal operation, press the button again. Then the indoor unit emits 2 short beeps.50 °F (10 °C) so as to prevent the room temperature to drop too low.When you press the button to start the MIN. HEAT operation, the indoor unit emits 2 short beeps and the ECONOMY indicator (green) turns on.Notes:• In MIN. HEAT operation mode, only vertical air fl ow direction can beadjusted by usingbutton.• HEAT mode will not be performed if the room temperature is warm enough.• In multi-type air conditioning system, if other indoor unit is in HEAT mode, the temperature of the room where MIN. HEAT operation is performed will rise. When performing MIN. HEAT operation, all the indoor units should be run in MIN. HEAT operation mode.To return to normal operation, press the START/STOP button.The ECONOMY indicator turns off.• Signal transmit indicator on the remote controller display shows that signal from the remote controller is being transmitted.• Operating range is approximately 22 ft. (7 m).• You will hear a beep if the transmitted signal has been sent properly. If there is no beep, press the button on the remote controller again.• When AUTO is selected, the fan speed is automatically adjusted according to the operation mode.Starts or stops automatic swing of the vertical air fl ow direction louver.• Each time you press the button, the vertical air fl ow direction louver swings as follows:1Notes:• SWING operation may stop temporarily when the fan in the unit is rotating at very low speed or stopping.• In FAN mode, either of swing direction 1 ↔ 3 or 4 ↔ 7 is performed in accordance with the vertical air fl ow direction previously set before you start the SWING operation.Remote Controller Overview and Operationsfl ow direction.with gradual temperature control.a ballpoint pen or other small object in correct direction as shown in this fi gure.consumption than the other operations with a conservative adjustment of the room temperature.When you press the button, the ECONOMY indicator on the indoor unit turns on.• In COOL or DRY mode, the room temperature will be adjusted at a few degree higher than the de fi ned temperature.In HEAT mode, the room temperature will be adjusted at a few degree lower than the de fi ned temperature.• Especially in COOL or DRY mode, you can have improved dehumidi fi cation without signi fi cantly lowering the room temperature.Notes:• In COOL, HEAT, or DRY mode, the maximum output of thisoperation is approximately 70 % of usual air conditioning operation.• This operation cannot be performed during temperature monitoring by AUTO mode.• In multi-type air conditioning system, ECONOMY operation isperformed only on the indoor unit whose ECONOMY button on the corresponding remote controller is pressed.(Factory setting is °F.)AIR CONDITIONER Wall Mounted Type Remote Controller Overview and OperationsNote for timer settings:Any interruption of the power supply, such as a blackout or cutting off of a circuit breaker, makes the set internal clock go wrong.In such a case, the TIMER indicator on the indoor unit blinks, and you need to readjust the setting.O N timer or OFF timer1.Turn on the indoor unit by pressing the START/STOP button.OPERATION indicator on the indoor unit turns on.If the indoor unit is already operating, skip this step.2.Press the ON timer button or the OFF timer button.Clock indicator on the remote controller display starts blinking, andTIMER indicator on the indoor unit turns on.3.Adjust the time by pressing the SELECT button within about 5seconds, while the clock indicator is blinking.(About 5 seconds later, the remote controller display returns tostandby screen.)To cancel the timer and return to the normal operation, press theCANCEL button.To redo the timer setting, perform step 2 and 3.Program timer (combined use of the ON timer and the OFF timer)You can set an integrated ON–OFF or OFF–ON timer.Either of the timer whose confi gured starting time is closer to thecurrent time works fi rst, and the order of timer operation is displayedThe timer that is set later starts counting down after the countingdown of the preceding timer is fi nished.Notes:• If you change the setting value for the timer after the program timeris set, the counting down of the timer will be reset at that moment.• Time setting for each combination should be within a span of 24 hours.SLEEP timer1.Press the SLEEP timer button to activate the SLEEP timer.OPERATION indicator and TIMER indicator on the indoor unit turnson.2.Adjust the time by pressing the SELECT button within about 5seconds, while the clock indicator is blinking.(About 5 seconds later, the remote controller display returns tostandby screen.)Each time you press the button, the time changes as follows:To repeat the timer, press the SLEEP timer button whenindicator is not displayed on the remote controller display.To help you to fall asleep comfortably and prevent excessive warmingor cooling in sleep, the SLEEP timer controls the temperature settingautomatically in accordance with the set time shown as follows. Theair conditioner completely turns off after the set time has elapsed. Timer OperationRemote controller custom code settingUse the following steps to select the customcode of the remote controller.(Note that the air conditioner cannot receivea custom code if the air conditioner has notbeen set for the custom code.)1. P ress the START/STOP button untilonly the clock is displayed on the remotecontroller display.2. P ress the MODE button for at least fi veseconds to display the current custom code(initially set to ).3. P ress the SET TEMP. ( / ) button to change the custom codebetween →→→.Match the code on the display to the air conditioner custom code.4. P ress the MODE button again to return to the clock display. Thecustom code will be changed.If no buttons are pressed within 30 seconds after the custom codeis displayed, the system returns to the original clock display. In thiscase, start again from step 1.The air conditioner custom code is set to A prior to shipment.Contact your retailer to change the custom code.Wired Remote Controller (Option)The optional wired remote controller can be used.When you use remote controller, there are following different points ascompared with using wireless remote controller.[The additional functions for wired ones]• Weekly timer• Temperature set back timerAnd you can use both wired and wireless remote controller simultane-ously.(But function is limited)When the restricted functions on the remote controller are used, beep-ing sound will be heard, OPERATION, TIMER and the 3rd lamp of theindoor unit will fl ash.[The restricted functions for wireless ones]• SLEEP TIMER• TIMER• MIN. HEAT• POWERFUL OPERATIONDaily careWhen cleaning the indoor unit body, mind the following:• Do not use water hotter than 104 °F (40 °C).• Do not use scouring cleanser, volatile solvents such as benzene or thinner.• Wipe the unit gently by using soft cloth.C leaning the intake grille 1. Open the intake grille in direction of the arrow a . While gently pressing the left and right mounting shafts of the intake grille outward b , remove the intake grille in direction of the arrow c .2. Wash the intake grille gently with water or wipe it gently with a softcloth moisten with warm water.Then wipe it with a dry and soft cloth.3. While holding the grille horizontal, set the left and right mountingshafts into the pillow blocks at the top of the panel a . To latch each shaft properly, insert the shaft until it snaps.Then close the intake grille b .4. Press 4 places on the intake grille to close it completely.Cleaning and CareGeneral Informations on OperationMalfunctions caused by other electrical devices:Use of other electrical appliances such as an electric shaver ornearby use of a wireless radio transmitter may cause the malfunction of the air conditioner.If you encounter such a malfunction, turn off the circuit breaker once. Then turn it on again, and resume operation by using the remote controller.AIR CONDITIONER Wall Mounted Type3. Attach new or maintained air cleaning fi lter d to the fi lter holder.New air cleaning fi lter can be attached to either of the right holder orthe left holder.4. Latch 2 corners of the fi lter holder e to the air fi lter fi rmly.5. Reinstall the air fi lter. (Refer to step 6 in “Cleaning the air fi lter”.)6. Close the intake grille fi rmly.(Refer to step 4 in “Cleaning the intake grille”.)Following 2 types of air cleaning fi lters are used in this product.When you replace them, purchase dedicated air cleaning fi lters for this product.APPLE-CATECHIN FILTER: UTR-FA16(1 sheet)With using static electricity, puri fi es the air by removing fi ne particles or dust such as tabacco smoke or plant pollen.• This fi lter is disposable. Do not wash or reuse it.• O nce you open the package, use it as soon as possible. The cleaning effect is reduced if the fi lter is left the package opened.• Replace the fi lter once every 3 months under normal use.• With setting the fan speed high, the air cleaning effect increases.(Light blue, 1 sheet)Contained super micro-ceramic particles produce negative air ions,that is considered to have deodorizing effect, absorb and reduce room smell.• To maintain the deodorizing effect, clean the fi lter once every 3 months as follows:1. Remove the ion deodorization fi lter.2. F lush the fi lter with high-pressure hot water until the surface of the fi lter is covered with water.3. W ash the fi lter gently with diluted neutral detergent. Do not wash it by wringing or rubbing to prevent reducing the deodorizing effect by damage.4. Rinse the fi lter well with water fl ow.5. Dry the fi lter throughly in shaded place.6. Reinstall the ion deodorization fi lter to the indoor unit.• Replace the fi lter once every 3 years under normal use.After extended non-use of the unitIf you have shut down the indoor unit for 1 month or more, perform the FAN operation for half a day to dry the internal parts throughly before you perform normal operation.Additional inspectionAfter long period of use, accumulated dust inside the indoor unit may reduce the product performance even if you have maintained the unit with instructed daily care or cleaning procedures written in this manual.In such a case, the product inspection is recommended.For more information, consult authorized service personnel.C leaning the air fi ltersMind that you have a periodical cleaning of the air fi lters to prevent reducing the operation ef fi ciency of the product. Using of clogged air fi lter with dust will lower the product performance, and may cause air fl ow reduction or increase of operating noise. Clean the air fi lters once every 2 weeks under normal use.1. Open the intake grille.(Refer to a of step 1 in “Cleaning the intake grille”.)2. While holding the intake grille with your hand, pull up the handle aof the fi lter in direction of the arrow and release the 2 claws b .Then pull the fi lter out with gently sliding it downward c .3. Filter holder and air cleaning fi lter are attached on the rear sideof the air fi lter. Remove them from the air fi lter by unlatching each corner of the fi lter holder d .4.Remove dust by using a vacuum cleaner or by washing the fi lter.When you wash the fi lter, use neutral household detergent and warm water.After rinse the fi lter well, dry it throughly in a shaded place before you reinstall it.5. Attach the air cleaning fi lter and the fi lter holder to each air fi lter.6. Attach the air fi lter with aligning both side of the fi lter with the frontpanel, and push in the fi lter fully.Note:Make sure that 2 claws are fi rmly snapped to the guide holes on the panel.7. Close the intake grille fi rmly.(Refer to step 4 in “Cleaning the intake grille”.)Replacing the air cleaning fi lter1. Remove the air fi lter. (Refer to step 1 in “Replacing the air fi lter”.)2. Release 2 latches a of the fi lter holder, and turn over the holder indirection of arrow b .Remove the soiled air cleaning fi lter c .Note: Air cleaning fi lter is attached on each air fi lter.Cleaning and CareFollowing symptoms do not indicate the product malfunction, but they are normal functions or characteristics of this product.Immediately stop operation and turn off the electrical breaker in following cases. Then consult authorized service personnel.• The problem persists even if you perform these checks or diagnostics.• The OPERATION indicator and TIMER indicator blink while the ECONOMY indicator is blinking fast.Troubleshooting。
微风龙头:极限飞行器手册说明书
BRITISH CLVIL AVIATION AUTHORITYDISCLAIMERPlease read Instructions and Disclaimer carefully before operation. This product is not suitable for people under the age of 14. By using this product you hereby agree to this disclaimer. You agree that you are responsible for your own conduct while using this product and agree to never use this product in a way that infringes personal privacy, local laws and regulations. Extreme Fliers shall not be held liable for any damage or legal responsibilities and/or accidents resulting from the use of this product. Full guidance is available on Left control stick Sideways bankingSideways TrimStandard & Stunt modePower switchMode 2 / Mode 4Speed settingPower indicatorAntennaInverted (fly upside down) Turning trim LCD screen Pitch Trim forwards/backwards Right control stick forwards/backwards, left/right Record Video, start/stop for each press Activate Smart Orientation (see guidelines)Return Home (see guidelines)MICRO DRONE 3.0: Flight in the Palm of Your HandHANDSET The M icro Drone 3.0 is your personal Drone, bringing together sophisticated technology in a small size Device. Whether you’re an expert pilot or first timer, it gives users a taste of features you would normally find in a larger system, which is safe, fun, easy to use, that anyone can fly.Inverted flying requires Inverted Blades. Be sure to install these before attempting to Invert.Always set the Home Point when activating Return Home and Smart Orientation.QUICK START GUIDE 1. DOWNLOAD THE APPWatch training videosBlades (default)3. SET UP TRANSMITTERPower on the handset(4 x AA Batteries required).Slow– ideal for beginnersFast– highly responsiveInsane – suitable for expert users5. POWER ON DRONEInsert the battery by sliding into position and attach the Camera with magnetic connection.Do not force the batteryPins may bend - carefully realign if necessary6. SYNC THE DRONEWait until the blinking LEDs turn solid, then push the throttle stick up and down once.Check blades spin freely by applying a little power.7. LAUNCH THE APPSearch and connect to Micro Drone 3.0 WiFiEnter the Fly ScreenSelect Handset or Phone in App SettingsPlace Smartphone into Flight Mode to prevent notifications and incoming calls causing disruptions8. SET GYRO HOME POINTPlace Drone in the direction you intend to fly.When Drone and Handset is Synced, hold both control sticks to the bottom right corner for 5 seconds.Essential for Smart Orientation and Return Home functionality.Shoot photos or videos using the Micro Drone App, or Handset Function button.Requires SD Card (Class 6 or above) to store footage on board the Drone.To use Handset for activating Camera, connect the camera module using Wired Connection Port.12. LANDINGTo land, hover over a level ground and gently lower the throttle to descend.After landing remove Camera and disconnect Battery.Never approach or touch the Drone while blades are spinning.Always cut the power using Controller/App first.NOTES ON CHARGINGConnect the USB charger to any USB plug such as a computer or wall charger.Disconnect the battery from Micro Drone then connect to the USB charger jack, the red light on the charger will flash to indicate charging.When charging is finished, the red light will turn solid green.Full charge takes about 60 mins.1.Batteries should be removed from the handset before storing.2.Always use new batteries in the handset to maintain a good connection.Functions may not work when less than 50% capacity.3.Never charge unattended.OPERATING TIPSTo ensure steady flight, set the 3 trimmers to fine tune the controls. The trim buttons are located aside to the left and right control sticks to set the turning, forward / backward pitch and side to side banking. Each time you click the trim button you will hear a beep, a long beep indicates that the trim is set to the centre.Note the trim buttons change depending on if it’s in mode 2 or mode 4.Push the throttle up to around quater or half way and Micro Drone will take off.We recommend removing the propeller guards when attaching the Camera or Camera/Gimbal.We do not recommend using the Inverted Blades with the Camera.Mode 2Mode 4MODE 2 AND MODE 4: ExplanationOnce you’ve learned to fly M icro Drone or any kind of Helicopter on a certain transmitter Mode, the chances are that you’ll stick with that same mode throughout your flying days. Re-learning to fly on a different mode is essentially the same as starting from sctatch, so we’ve made it with the two most common flight controls and outlined how these work for Micro Drone.The transmitter modes for Micro Drone echo the ones for R/C Airplanes (in terms of turning). With that in mind we have designed Micro Drone with Mode 2 and Mode 4 industry standards making it user friendly for first time users or for Radio Control pilots accustomed to professional flying. The handset allows you to switch between Mode 2and Mode 4. The slider is located at the bottom/left.FLIGHT OPERATIONSACCELEROMETERSwitch on to control the Drone by tilting your smartphone.Once activated, tap and hold the right touchpad then tilt.Release the touchpad to hover.HOME SCREENTraining VideosReview Footage SCREEN VIEWFull Screen or 3DSplit Screen for FPVSOCIAL INTEGRATIONComing in 2016TRIM BARSAdjust the Pitch, Roll and Yaw. Tap the centre point to reset.TOUCH PADControl the Drone via your Smartphone or Handset, touch anywhere on the screen.PHOTO – tap once to take a photoVIDEO – tap once to start recordingand again to stop recording.SMART ORIENTATIONAlign the Drone and Smartphonecontrols to fly on a locked headingMODESwitch the flight screen touchpadbetween Mode 2 and Mode 4BACK To the flight screen TRIM BAR Hide the Trim bar from the flight screen CONTROL Tap Phone to control the Drone via Smartphone WiFi or Handset (default) to control via the 2.4ghz Radio Handset SPEED SETTINGSlide the bar to adjust the speedsetting to your preference RESET To the Default settingsFULLY-FEATURED ACCOMPANYING APPMicro Drone 3.0 has a companion App that is feature rich and intuitively designed. It can be used for First Person View via the live streaming video as well as control of the Drone and collecting, managing and sharing your videos.iOS has some weird connection issue we couldn't figure out - when connecting iPhone to the Drone's WiFi, you might notice it connects, disconnects then reconnects again after 5 seconds (after that it's fine)Check periodically for new updates and features on the App Store and Google Play (iOS and Android)TRIMMER FUNCTIONS Forward and Backwards TrimTo activate inverted mode in the air, flick the top right corner switch. The Drone will flip over and the motors will immediately go into reverse, to provide opposite thrust.MOTOR DIAGRAMINVERTED FLYINGEnsure the Correct Blade is fitted to correct Clockwise or Counterclockwise motor arm.When fitting White and Grey Inverted blades: White A fits Arm A, White B fits Arm B, Greyto use inverted mode. Blade must be correctly installed (White A / B at the front, Grey A / B at the back).We recommend having adequate flying experience before using this feature.Activating inverted with regular blades can result in serious damage to the Motors, Structure and Flight Board.When the Drone is upside down, the controls will be reversed with the Blue LEDs becoming the Front.Take care to ensure blades do not hit the ground, always land the Drone in the correct non-inverted orientation.Activate inverted at least 3m from the ground with plenty of room.Using Inverted blades reduces lifting capacity and flight time, use regular blades for high performance.SMART ORIENTATIONThis feature unlocks the orientation so that the navigation is not determined by the direction which the Drone is facing.In standard mode with Smart Orientation off, the drone has a front and a back, determined by the Black / Red blades or White / Blue LEDs, so when you navigate forwards, it moves in the direction that the front is facing (ie if the black blades are facing you, it moves towards you). This can be difficult to make out when the Drone is a long distance away. Smart orientation helps with this.Setting up Smart OrientationWhen pairing the Drone, you must position the quadcopter such that its front points away from you. Once paired it’s forward position will be fixed, every direction Forward/Backward/Left/Right will be set from this. Activate by pressing the button once, the red light will indicate it is on.When you take off with the Drone facing forward from you, the micro-controller continuously adjusts the navigation so that even when you turn the Drone 90 degrees to the left/right, it will still go forward/backward on the fixed axis you set at the beginning.RETURN HOMEUsers are advised to familiarise themselves with this feature before use. Unlike a GPS return home system, this uses a programmed method that memorises it’s start heading and is designed to help pilots return the Drone on a straight axis when you have lost control.For this to work correctly, when pairing the Drone, you must position the Drone on the ground such that its front points away from you on the line you wish it to return.This function is based on the assumption that the user is flying the Drone in front of them. Hold down the Return home button and the Drone will fly back towards the pilot in a straight line on a fixed axis, let go of the button and the Drone will stop returning.When Drone is directly ahead of the pilot, will return in a straight line.When Drone is ahead but over to the right of the pilot, it will return in a straight line and end up to the right side(use the side-to-side control stick to move the Drone inline with the pilot).When Drone is behind the pilot, it will continue to fly in a straight line away from the pilot. Always fly ahead of you when using Return home.Use the roll stick depending on where the Drone is located in relation to you. The altitude stick must continue to be controlled while using return home.Select a faster Return speed by selecting one of the Speed Settings.MID AIR FLIPSM icro Drone can perform mid-air flips with a specially designed, preprogramned algorithm. To activate this, it must be switched into Stunt Mode, slide to the right. WARNING:in Stunt M ode, moving the control sticks will perform aggressive maneuvers and could cause Micro Drone to crash if not controlled carefully. If doing for the first time, we suggest familiarising yourself with the controls before attempting this. Hover Micro Drone at least 3 metres from the ground then push the control sticks in the direction you want to flip. Switch back in to Standard Mode for regular flying.Happy FlyingExtreme Toys Ltd12 Deer Park RoadLondon SW19 3FBwww.extremeflcustomerserivce@extremefl。
16位数智能温度控制器 E5CN 产品说明书

Digital Temperature ControllersE5CNCompact and Intelligent TemperatureControllersVarious temperature inputs: thermocouple, plati-num resistance thermometer, non-contact temper -ature sensor, and analog inputs.Auto-tuning and self-tuning available. Auto-tuning is possible even while self-tuning is being executed.Heating or heating/cooling control is available.Event input allows multiple SP selection and run/stop function.Water-resistant construction (NEMA4X: equivalent to IP66).Conforms to UL, CSA, and IEC safety standards aswell as CE marking.48(W) x 48(H) x 78(D) mm2.The heating and cooling function is available for models with two alarm points.3.Specify the power supply specifications when ordering.The E5CN provides communications or event input functionality when mounted with one of the following Option Units.NameModelFunctionCommunications Unit E53-CNH03 (For relay and voltage output)RS-485 communication and heater burnout alarmCo u ca o s U E53-CN03 (For current output)RS-485 communicationEvent Input Unit E53-CNHB (For relay and voltage output)Event input and heater burnout alarme u U E53-CNB (For current output)Event inputNote:The heater burnout alarm is available by mounting the E53-CNH03 or E53-CNHB Option Unit on the E5CN.Model E54-CT1E54-CT3Hole diameter5.8 dia.12.0 dia.Model E53-COV10Note:The Terminal Cover comes with the E5CN and does not have to be purchased separately .Platinum Resistance Thermometer Input/Thermocouple InputApplicable standards by input type are as follows:K, J, T, E, N, R, S, B: JIS C1602-1995L: Fe-CuNi, DIN 43710-1985U: Cu-CuNi, DIN 43710-1985JPt100: JIS C1604-1989, JIS C1606-1989Pt100: JIS C1604-1997, IEC751Shaded ranges indicate default settings.RatingsSupply voltage100 to 240 V AC, 50/60 Hz24 V AC, 50/60 Hz/24 VDCOperating voltage range85% to 110% of rated supply voltagePower consumption7 V A 4 V A/3 WSensor input Thermocouple: K, J, T, E, L, U, N, R, S, BPlatinum resistance thermometer:Pt100, JPt100Non-contact temperature sensor:10 to 70_C, 60 to 120_C, 115 to 165_C, 160 to 260_CV oltage input: 0 to 50 mVControl outputControl output Relay output SPST-NO, 250 V AC, 3 A (resistive load), electrical life: 100,000 operationsV oltage output12 VDC (PNP), max. load current: 21 mA, with short-circuit protection circuitCurrent output 4 to 20 mA DC, load: 600 Ω max., resolution: approx. 2,600Alarm output SPST-NO, 250 V AC, 1 A (resistive load), electrical life: 100,000 operationsControl method2-PID or ON/OFF controlSetting method Digital setting using front panel keysIndication method7-segment digital display and single-lighting indicatorCharacter height: PV: 9.9 mm; SV: 6.4 mmOther functions According to Controller modelAmbient temperature–10 to 55_C (with no condensation or icing)Ambient humidity25% to 85%Storage temperature–25 to 65_C (with no condensation or icing)CharacteristicsIndication accuracy Thermocouple:(±0.5% of indicated value or ±1_C, whichever greater) ±1 digit max. (see note )Platinum resistance thermometer:(±0.5% of indicated value or ±1_C, whichever greater) ±1 digit max.Analog input: ±0.5% FS±1 digit max.CT input: ±5% FS±1 digit max.Hysteresis0.1 to 999.9 EU (in units of 0.1 EU)Proportional band (P)0.1 to 999.9 EU (in units of 0.1 EU)Integral time (I)0 to 3999 s (in units of 1 s)Derivative time (D)0 to 3999 s (in units of 1 s)Control period 1 to 99 s (in units of 1 s)Manual reset value0.0% to 100.0% (in units of 0.1%)Alarm setting range-1999 to 9999 (decimal point position depends on input type)Sampling period500 msInsulation resistance20 MΩ min. (at 500 VDC)Dielectric strength2000 V AC, 50 or 60 Hz for 1min (between dif ferent charging terminals)V ibration resistance10 to 55 Hz, 10 m/s2 for 2 hours each in X, Y and Z directionsShock resistance300 m/s2, 3 times each in 3 axes, 6 directions (relay: 100 m/s2)Weight Approx. 150 g Mounting bracket: Approx. 10 gProtective structure Front panel: NEMA4X for indoor use (equivalent to IP66), rear case: IP20, terminals: IP00Memory protection EEPROM (non-volatile memory) (number of writes: 100,000)EMC Emission Enclosure:EN55011 Group 1 class AEmission AC Mains:EN55011 Group 1 class AImmunity ESD:EN61000-4-2: 4 kV contact discharge (level 2)8 kV air discharge (level 3)Immunity RF-interference:ENV50140:10 V/m (amplitude modulated,80 MHz to 1 GHz) (level 3)10 V/m (pulse modulated, 900 MHz)Immunity Conducted Disturbance:ENV50141:10 V (0.15 to 80 MHz) (level 3)Immunity Burst:EN61000-4-4: 2 kV power-line (level 3)2 kV I/O signal-line (level 4) Approved standards UL3121-1, CSA22.2 No. 14, E.B.1402CConforms to EN50081-2, EN50082-2, EN61010-1 (IEC61010-1)Conforms to VDE0106/part 100 (Finger Protection), when the terminal cover is mounted.Note:The indication of K thermocouples in the -200 to 1300°C range, and T and N thermocouples at a temperature of -100°C or less, and U and L thermocouples at any temperature is ±2°C±1 digit maximum. The indication of B thermocouples at a temperature of 400°C or less is unrestricted.The indication of R and S thermocouples at a temperature of 200°C or less is ±3°C±1 digit maximum.Note:The baud rate, data bit length, stop bit length, or vertical parity can be individually set using the communications setting level.Dielectricstrength 1,000 V AC (1 min)V ibration resistance 50 Hz 98 m/s 2WeightE54-CT1: Approx. 11.5 g E54-CT3: Approx. 50 g Accessories (E54-CT3 only)Armature (2)Plug (2)Max. heater currentSingle-phase AC: 50 A (see note 1)Input current readout accuracy ±5%FS ±1 digit max.Heater burnout alarm setting range 0.0 to 50.0 A (0.1 A units) (see note 2)Min. detection ON time 190 ms (see note 3)Note:1.When heater burnout is detected on a 3-phase heater , use the K2CU-F jj A-j GS (with gate input terminal).2.When the set value is “00 A,” the heater burnout alarm will always be OFF . When the set value is “50.0 A,” the heater burnout alarm will always be ON.3.When the control output ON time is less than 190 ms, heater burnout detection and heater current measurement will not be carried out.Level keyOperation indicatorsTemperature unitMode key Down keyNo.1 displayNo.2 displayUp key•Recommended panel thickness is 1 to 5 mm.•Group mounting is not possible in the vertical direction.(Maintain the specified mounting space between Controllers when they are group mounted.)•To mount the E5CN so that it is waterproof, apply the waterproof packing to the E5CN.•When two or more E5CNs are mounted, make sure that the surrounding temperature does not exceed the allowable operating temperature specified in the specifications.(48 number of units -2.5)60 min.60 min.+1.00454545+0.6+0.60+0.60Panel CutoutsGroup mounting does not allow waterproofing.Mounted SeparatelyGroup MountedNote :The suffix “500” is added to the model number of each Controller provided with a E53-COV10 Terminal Cover.48 x 4844.8 x 44.8Terminal CoverE53-COV10Current Transformer (Sold Separately)E54-CT1E54-CT35.8 dia.Two, 3.5 dia.12 dia.Two, M3 (depth: 4)40 x 402.36 dia.The voltage output (control output) is not electrically insulated from the internal circuits. When using a grounding thermocou-ple, do not connect the control output terminals to the ground. If the control output terminals are connected to the ground, errors will occur in the measured temperature values as a result of leakage current.Standard insulation is applied to the power supply I/O sections. If reinforced insulation is required, connect the input and output terminals to a device without any exposed current-carrying parts or to a device with standard insulation suitable for the maximum operating voltage of the power supply I/O section.Control output 1Analog inputInput power supplyAlarm outputALM1/Heater burnoutALM2/Control output 2Two input power supplies are available: 100 to 240 VAC or 24 VDC.Voltage OutputRelay Output12 VDC 21 mACurrent outputEvent Input/Heater Burnout DetectionE53-CNHB Event Input/Heater Burnout Alarm UnitContact inputNon-contact inputHeater burnout detection inputEvent InputE53-CNB Event InputContact inputNon-contact inputDo not connect anything.Do not connect anything.Communications Specification/Heater Burnout SpecificationE53-CNH03 Communications/Heater Burnout Alarm UnitDo not connect anything.H o s t c o m p u t e rCommunications SpecificationE53-CN03 Communications UnitDo not connect anything.H o s t c o m p u t e rDo not connect anything.Do not connect anything.ALL DIMENSIONS SHOWN ARE IN MILLIMETERS.To convert millimeters into inches, multiply by 0.03937. T o convert grams into ounces, multiply by 0.03527.。
机械限位的方式阻止浮球超出范围 英文
机械限位的方式阻止浮球超出范围英文In the realm of mechanical engineering, the concept of limiting the range of motion of a floating object, such as a float ball in a fluid system, is a critical aspect of design and safety. The float ball is an integral component in various applications, from simple household toilet tanks to complex industrial fluid control systems. Its primary function is to regulate the level of fluid within a container. However, without proper constraints, the float ball could exceed its intended range, leading to potential system failure or overflow.To prevent such occurrences, mechanical stops are employed. These are physical barriers designed to restrict the movement of the float ball to within a predetermined area. The design and implementation of these stops require careful consideration of the materials used, the environmental conditions, and the forces at play within the system.Material Selection。
美国EBC公司的气候控制系统产品说明书

312©2021Model Number:Used With:EBC Cooling Only (Electric Heat Optional)GBC Gas Heat UnitList of OptionsFactory Installed Options Field Installed Options10-year Limited Stainless Steel Heat Exchanger Warranty Barometric Relief DamperHigh Static Motor Kit (a)(a)Available on constant volume units only. See product catalog for moreinformation.CO 2 sensor - Demand Control Ventilation (DCV)Condensate Overflow Switch Economizer (Downflow)Electric Heaters Hail/Vandal Guards High Static Motor Kit (a)Low Ambient Cooling Low Leak Economizer Manual Outside Air Damper Motorized 2-Position Damper Powered Exhaust Remote PotentiometerTable 1.General data—heating performance – 7.5–12.5 tonsHeating Performance (a)7.5 - 8.5 Tons10 - 12.5 Tons Heating Models Low Medium HighLowMediumHighHeating Input (Btu/h)125,000180,000225,000180,000225,000250,0001st Stage (Btu)87,500126,000158,000126,000158,000175,000Heating Output (Btu/h)100,000144,000180,000144,000180,000200,0001st Stage (Btu)70,000100,000125,000100,000125,000140,000Steady State Efficiency %80%80%80%80%80%80%No. Burners 356566No. Stages222222Gas Supply Line Pressure (in. wc)Natural Gas (minimum/maximum) 4.5 / 14.0 in. wc. 4.5 / 14.0 in. wc. 4.5 / 14.0 in. wc. 4.5 / 14.0 in. wc. 4.5 / 14.0 in. wc. 4.5 / 14.0 in. wc.Gas Connection Pipe Size (in.)1/2”1/2”3/4”1/2”3/4”3/4”(a)Heating Performance limit settings and rating data were established andapproved under laboratory test conditions using American National Standards Institute standards (ANSI). Ratings shown are for elevations up to 2,000 feet. For elevations above 2,000 feet, ratings should be reduced at the rate of 4% for each 1,000 feet above sea level.Table 2.Unit wiring with cooling only (no electric heat) or gas heatTonsUnitModel NumberUnit Operating Voltage Range Standard Indoor Fan Motor Oversized Indoor FanMotorMinimum Circuit Ampacity (a)Maximum Fuse Size orMaximumCircuitBreaker Minimum Circuit Ampacity Maximum Fuse Sizeor Maximum Circuit Breaker 7.5E/GBC090A 208-230375042508.5E/GBC102A 208-2304050455010.0E/GBC120A 208-2305470597012.5E/GBC150A208-23062806780Table 1.General data—heating performance – 7.5–12.5 tonsHeating Performance (a)7.5 - 8.5 Tons10 - 12.5 Tons (a)For Standard and Oversized Indoor Fan Motor, values do not include powerexhaust accessory.Table 3.Electrical characteristics - evaporator fan motorTonsUnit Model NumberStandard Evaporator FanMotor Oversized Evaporator FanMotor No.Volts Phase Hp Amps No.Volts Phase Hp Amps FLA FLA 7.5E/GBC090A 1208-23032 5.81208-230337.58.5E/GBC102A1208-23032 5.81208-2303511.010.0E/GBC120A 1208-230337.51208-2303511.012.5E/GBC150A1208-230337.51208-2303511.0Table 4.Unit dimensional data (in inches)7.5 Ton8.5, 10, and 12.5 TonsUnit Length 88.2588.25Unit Width 58.7558.75Unit Height44.0049.063Clearance C160.0060.00Clearance C248.0048.00Clearance C348.0048.00Curb Length 84.8084.80Curb Width 54.5654.56Supply Length 32.25632.256Supply Width 15.5215.52Return Length 37.92137.921Return Width15.79915.799October 2021RT-PRC094B-ENQuick Reference GuideFoundation™7.5 to 12.5 Tons Packaged Rooftop Units Cooling and Gas/Electric5RWRLSWSLCWCLTable 5.Curb matrixType Trane Lennox CarrierBryant JCI/York ICP HeilDay and NighGoodman Daikin Older VoyagerGas/ElectricGBC036-060ZGB 036-06048DJ 004-00, 48GJ 00648HC 004-006, 48HE 004-00648HJ 004-006, 48KC 004-00648LJ 004-006, 48LC 004-00648TC 004-006, 48TF 004-00648TJ 004-006, 48TM 004-00648FC_A04-06, 48FC_B04-0648FC_M07, 48FC_N0748GC_M04-05, 48GC_N04-0648HC_G04-06, 48LC_A04-0648TC_D04-D07, 48KC_A04-06579A 036-060580C 036-060580D 036-060580F 036-060580J 04-06581C 036-060581J 04-06ZXG 04-06ZYG 04-06CPG (BA) 036-060DSG 036-060ULUWUH7Electric/ElectricEBC036-060ZCB 036-06050GJ 006, 50HC 004-00650HE 004-006, 50HJ 004-00650KC 004-006, 50LC 004-00650LJ 004-006, 50TC 004-00650TFF 004-006, 50TJ 004-00650TM 004-006, 50TC_B04-0750FC_A04-06, 50FC_B04-0650FC_M07, 50FC_N0750GC_M04-05, 50GC_N04-0650HC_G04-06, 50LC_A04-0650TC_D04-D07, 50KC_A04-06551B 036-060558C 036-060558D 036-060558F 036-060558J 04-06ZXE 04-06ZYE 04-06CPC (BA) 036-060DSC 036-060Gas/Electric GBC090-150ZGA092-15048DJ008 - 01448GJ008 - 01248HJ008 - 01448LJ008 - 01448QJ008 - 01448TC_08 - 1448TF008 - 01448TJ008 - 01448TM008 - 01448HC_G08-1248LC_A0748LC_B0748TC_E08-1448TC_M08-12581B090 - 150581C090 - 150580C090 - 150580D090 - 150580F090 - 150580J08 - 12581J_08 - 12581J_04 - 07PGE090 - 150PGH090 - 150RGS090 - 150CPG090 - 150**DCG090 - 150**Electric/ Electirc EBC090-150ZCA092 - 15050DJ008 - 014, 50GJ008 - 01250HJ008 - 014, 50HE004 - 00650LJ008 - 014, 50QJ008 - 01450TC_08 - 14, 50LC_04 - 0650TF008 - 014, 50TJ008 - 01450TM008 - 014, 50LC_A0750TC_E08-14, 50TC_M08-1250HC_G07-12551B090 - 150558C090 - 150558D090 - 150558F090 - 150558J08 - 12551J08 - 12PAE090 - 150PAH090 - 150RAS090 - 150CPC090 - 150**DCC090 - 150**Type Trane Lennox Carrier Bryant JCI/YorkICPHeilDay and NighGoodmanDaikinOlderVoyagerHeat Pump ZHA092 - 12050QJ008 - 012, 50HJQ008 - 01250LJQ008 - 012, 50TCQ_08 - 1250TFQ008 - 012, 50TJQ008 - 01250HCQD07-09, 50TCQD08-12549B_X090 - 120548B_X090 - 120548C_X090 - 120548D_X090 - 120548F_X090 - 120548J_08 - 12PHE090 - 120PHS090 - 120PHH090 - 120RHS090 - 120CPH090 - 120**DCH090 - 120**Gas/Electric GB*18048TJD016, 48TJE01648TJF016, 48HJD01748HJF017, 48TMD01648TMF016, 48DP01648DR016YCD180E YCD180F YSD180F YHD180F YCD181B YCD181C YCD181E YCD181FGB*21048TJD020, 48TJF02048TMD020, 48TMF02048DP020YCD210A YCD210B YCD210E YCD210F YSD210F YHD210F YCD211B YCD211C YCD211E YCD211FGB*24048HJD025, 48HJF02548TJD024, 48TJE02448TJF024, 48TMD025YCD240A YCD240B YCD240E YCD240F YSD240F YHD240F YCD241B YCD241C YCD241E YCD241FTable 5.Curb matrix (continued)Type Trane Lennox Carrier Bryant JCI/YorkICPHeilDay and NighGoodmanDaikinOlderVoyager©2021Trane and American Standard have a policy of continuous product and product data improvement and reserve the right to change design and specifications without notice. We are committed to using environmentally conscious print practices.Trane and American Standard create comfortable, energy efficient indoor environments for commercial and residential applications. For more information, please visit or .GB*30048TJD028, 48TJE02848TJF028, 48TMD02848TMF028YCD300B YCD300E YCD300F YSD300F YHD300F YCD301C YCD301E YCD301F Electric/ElectricGB*18050TJ016, 50TM01650DP016, 50HJ017TCD180E TCD180F TSD180F THD180F TCD181B TCD181C TCD181E TCD181F GB*21050DP02050TJ02050TM020TCD210A TCD210B TCD210E TCD210F TSD210F THD210F TCD211B TCD211C TCD211E GB*24050TJ02450TM02550HJ025TCD240A TCD240B TCD240E TCD240F TSD240F THD240F TCD241B TCD241C TCD241E TCD241F GB*30050TJ02850TM028TCD300B TCD300E TCD300F TSD300F THD300F TCD301C TCD301E TCD301FType Trane Lennox CarrierBryant JCI/YorkICP HeilDay and NighGoodman Daikin Older Voyager RT-PRC094B-EN 13 Oct 2021Supersedes RT-PRC094A-EN (Apr 2021)。
Yokogawa电子有限公司UT35A、UT32A数字显示控制器说明书
GeneralUT35A, UT32ADigital Indicating Controller(Panel Mounting Type)GS 05P01D31-01ENOverviewThe UT35A and UT32A digital indicating control-lers employ an easy-to-read, 14-segment large colorLCD display, along with navigation keys, thus greatly increasing the monitoring and operating capabilities. A ladder sequence function is included as standard. The short depth of the controller helps save instrument panel space. The UT35A and UT32A also support open networks such as Ethernet communication.The UT35A and UT32A have a DIN rail mounting type (with option code /MDL). For more details, please seeFeatures• A 14-segment, active (PV display color changing function) color LCD display is employed.manner. The guide display shows parameter names.• Easy to operateNavigation keys (SET/ENTER and Up/Down/Left/Right arrow keys) are employed to facilitate making settings.• 65 mm depthsmall instrumented panel.• Ladder sequence function is included as standard. This function allows for creating a simple sequence control. Dedicated LL50A Parameter Setting Software (sold separatly) allows for performing programming using a ladder language.-(UT32A support CC-Link and RS485 communicationonly.)• Quick setting functionSetting only the minimum necessary parameters for.• Equipped with a multitude of functionsUniversal I/O and retransmission output are included as standard. PID control, heating/cooling control, etc. • LL50A Parameter Setting Software (sold separately) The parameters and ladder programs of UTAdvanced using this software. It makes data management even easier.• Dust-proof and drip-proof close mounting.)NEMA4 (Hose-down test only)(1) Control Mode Single-loop control (2) Control period 200 msTable of Number of Inputs and Outputs*2: In the case cooling control output is analog output, it *3:Excluding control output relaysUT35A UT32AControl Computation Function(1) Types of control • PID control• ON/OFF control (*4)• Two-position two-level control (*5)• Heating and cooling control (*5)(2) Control Computation Function-eter groupsRespectively, four sets of target setpoints, alarm• Measured input zone PID • Target setpoint zone PID• Reached target setpoint zone PID(c) Auto-tuningheating/cooling control.)(d) “Super” function: Overshoot-suppressing function (e) “Super 2” function: Hunting-suppressing function (f) STOP preset output function(g) Input ERROR preset output function (h) MANUAL preset output functionAlarm FunctionsContact I/O FunctionThis function allows for allocating the input errorcondition, operation condition, alarm condition or otherconditions to the contact input and contact output.Ladder Sequence Functionpoints. (See the model code.)Physical InterfaceEthernet Standard : IEEE802.3 (10BASE-T, 100BASE-TX)Max segment length : 100mRS-485 Standard : EIA RS-485Communication method : Two-wire harf-duplex or four-wire harf-duplex, start-stop synchoronization,and non-proceduralMaximum communication distance : 1200mCorresponding version : DP V0Baud rate : 9.6k, 19.2k, 45.45k, 93.75k, 187.5k, 0.5M, 1.5M, 3M, 6M, 12M, AUTO (*3)Communication distance : 1200m (9.6k to 93.75k) 1000m (187.5k)400m (0.5M) 200m (1.5M)100m (3M to 12M)CC-Link Supported version : Remote device (Ver.1.10, Ver.2.00)When using optical repeater : 7.6 km (156k) to 4.3 km (10M)Control output (heating-side output): 1 point(standard), which is shared with transmissionoutputCooling-side output: 1 point, which isshared with transmission output• Output functionsCurrent output or voltage pulse output• Current output4 to 20 mA DC or 0 to 20 mA DC/load resistance• Current output accuracy±0.1% of span (however, ±5% of span for 1 mAor less)The accuracy is that in the standard operatingconditions: 23 ±2°C, 55 ±10%RH, and powerfrequency at 50/60 Hz• Voltage pulse outputApplication: time proportional outputON voltage: 12 V or more/load resistance of 600OFF voltage: 0.1 V DC or lessTime resolution: 10 ms or 0.1% of output value,whichever is largerwith 15 V DC loop power supplyAdditional 1 points when analog control output arenot used• Output function: current output4 to 20 mA DC or 0 to 20 mA DC/load• Current output accuracy (conversion accuracy from PV display on the set scale): ±0.1% of span (how-ever, ±5% of span for 1 mA or less)conditions: 23 ±2°C, 55 ±10%RH, and powerfrequency at 50/60 HzThis is not conversion accuracy through inputoutput itself.with retransmission output• Supply voltage: 14.5 to 18.0 V DCcircuit current limiting circuit)Within 1 s(Response time at 63% of transmission output when a 90% of input span)Control relay output: one 1c-contact pointControl output of heating and cooling control:2 1a-contact pointsAlarm output: 3 1a-contact points (Common isseparated)• Contact rating1c-contact: 3 A at 250 V AC or 3 A at 30 V DC (resistance load)1a-contact:For alarm output: 1 A at 240 V AC or 1 A at30 V DC (resistance load)For output of heating and cooling controlrelay output: 3 A at240 V AC or 3 A at 30 V DC (resistance load)of 10 mA or more.of 1 mA or more.• Application: time proportional output, alarm output, FAIL output, etc.• Time resolution for control output: 10 ms or 0.1% of output value, whichever is larger• Output form: open collector (sink current)• Output contact capacity: Up to 24 V DC, 50 mA• Output time resolution: min 200 ms• Application: alarm output, FAIL output, etc.• Position signal inputof total resistance100% side and slide line: with disconnectiondetection0% side: without disconnection detection Current input: 4 to 20 mA DC (with disconnectiondetection)• Sampling period: 50 ms• Measurement resolution: 0.1% of input span• Position proportional relay outputUT35A: Two 1a-contact points , 3 A at 250 VAC or 3A at 30 V DC (resistance load) UT32A: Two 1a-contact points , 3 A at 240 VAC or 3A at 30 V DC (resistance load) *:• Function: Measures the heater current using an external current transformer (CT) and generates a than the disconnection detection value.output)• CT input range: 0.0 to 0.1 Arms (0.12 Arms or more• Heater current alarm setting range: OFF, 0.1 to 300.0 ArmsHeater current measured value display range: 0.0 to 360.0 Arms• Recommended CT: CT from URD Co. Ltd.range: 0.1 to 80.0 Armsrange: 0.1 to 180.0 Arms• Heater current measurement period: 200 ms• Heater current measurement accuracy: ±5% of CT input range span ±1 digit (CT error is not included)• Heater current detection resolution: Within 1/250 of CT input range span• Disconnection detection ON time: Minimum 200 ms. (for time proportional output)(for /LP Option)• Application: Power is supplied to the 2-wire transmitter.• Supply voltage: 21.6 to 28.0 V DC• Rated current: 4 to 20 mA DCcircuit current limiting circuit)Safety and EMC Standards• Safety:Compliant with IEC/EN 61010-1 (CE), IEC/EN 61010-61010-1.Installation category: IIPollution degree: 2Measurement category: I (CAT I) (UL, CSA)O (Other) (CE)Rated measurement input voltage: Max. 10 V DCRated transient overvoltage: 1500 V (*)*: This is a reference safety standard value for measure-ment category I of CSA/UL 61010-1, and for measure-ment category O of IEC/EN 61010-2-030. This value isnot necessarily a guarantee of instrument performance.• EMC standards:Compliant withCE markinglocations),EN 61326-2-3*: The instrument continues to operate at a measurement accuracy of within ±20% of the range during testing.EN 55011 Class A, Group 1EN 61000-3-2 Class AEN 61000-3-3EMC Regulatory Arrangement in Australia and New ZealandEN 55011 Class A, Group 1• KC marking: Electromagnetic wave interference prevention standard, electromagnetic wave protection standard compliance• Power supplyRated voltage: 100 to 240 V AC (+10%/-15%), 50/60 Hz24 V AC/DC (+10%/-15%) (When the • Power consumption: UT35A: 18 VA (For the /DCoption. DC: 9 VA, AC: 14 VA)UT32A: 15 VA (For the /DCoption. DC: 7 VA, AC: 11 VA)• Storage: Nonvolatile memory•• Withstanding voltagesecondary terminals (UL, CSA)secondary terminals (CE)terminals(Primary terminals = Power (*) and relay outputterminals, Secondary terminals = Analog I/O signal terminals, contact input terminals, communication terminals, and functional grounding terminals.)*: Power terminals for 24 V AC/DC models are thesecondary terminals.• Insulation resistanceBetween power supply terminals and a grounding The circuits divided by lines are insulated mutually.Control and transmission (analog) output terminal(not isolated between the analog output terminals)Valve position (feedback) input terminalPV (universal) input terminalControl relay (c-contact or 2 a-contact) output terminalAlarm-1 relay (a-contact) output terminalAlarm-2 relay (a-contact) output terminalAlarm-3 relay (a-contact) output terminalPosition proportional relay output terminalInternalcircuitsPowersupplyContact input terminal (All)RS485 communication terminal (2 ports)24 V DC loop power supply terminalEthernet/PROFIBUS-DP/CC-Link/DeviceNetcommunication terminalCurrent transformer input terminalContact output (transistor) terminalEnvironmental ConditionsNormal operating conditionsmounting: -10 to 40 °C)UT35A; 0 to 40 °C for UT32A.UT32A with CC-Link option)1.5 mm or less(at 9 to 150 Hz) 4.9 m/s2 or less, 1 oct/min for 90 min-utes each in the three axis directions2, 15 s or less• Impact: 98 m/s2 or less, 11 msec.• Warm-up time: 30 minutes or more after the power is turned on• Start-up time within 10 sTransportation and Storage Conditions• Temperature: -25 to 70°C• Temperature change rate: 20°C per hour or less• Humidity: 5 to 95%RH (no condensation)Effects of Operating ConditionsFor voltage or TC input:range)/°C, whichever is greaterFor RTD input:For current input:±0.01% of F.S. (instrument range)/°CFor analog output:±0.02% of F.S./°C or lessFor analog input: ±0.05% of F.S. (instrument range) or lessFor analog output: ±0.05% of F.S. or less(Each within rated voltage range)Block DiagramSingle Loop Control(Current when retransmission output)PV inputContact inputsEquipped as standardEquipped as standard.UT35AUnit: mm[(N-1)×96+92]+0.80+.892“N” stands for the number of controllers to beinstalled.• General mounting• Side-by-side close mountingNormal tolerance:±(value of JIS B 0401-1998 tolerance class IT18)/2UT32AUnit: mm[(N-1)×48+45]+0.60+.892• General mounting• Side-by-side close mounting“N” stands for the number of controllers to beinstalled.However, the measured value applies if N5.Normal tolerance:±(value of JIS B 0401-1998 tolerance class IT18)/2Construction, Mounting, and Wiring• Dust-proof and drip-proof: IP66 (Front panel) (Not*: Hose-down test only•• Case color: White (Light gray) or Black (Light Char-coal gray)• Weight: 0.5 kg or less• External dimensions (mm):UT35A: 96 (width) x 96 (height) x 65 (depth from thepanel surface)UT32A: 48 (width) x 96 (height) x 65 (depth from thepanel surface)one each for upper and lower mounting• Panel cutout dimensions (mm):UT35A: 92+0.8/0 (width) x 92+0.8/0 (height)UT32A: 45+0.6/0 (width) x 92+0.8/0 (height)-zontal. No downward titling allowed.• Wiring: M3 screw terminal with square washer (signalwiring and power)Standard accessoriesUser’s ManualURL: /ns/ut/im/。
captainhook方法
captainhook方法一、什么是CaptainHook方法CaptainHook方法是一种软件开发中的版本控制和代码审查工具,它能够帮助开发者在代码提交时进行自动化的静态代码分析和检查。
二、CaptainHook的优势1.提高代码质量:CaptainHook能够在代码提交前对代码进行自动化检查,发现潜在的问题和错误,帮助开发者及时修复和优化代码,提高代码质量。
2.降低风险:通过CaptainHook的静态代码分析,可以避免一些常见的编程错误和安全漏洞,减少系统出现故障和漏洞的风险。
3.统一编码规范:CaptainHook可以根据项目的编码规范进行代码审查,确保开发人员的编码风格一致,提高代码的可读性和可维护性。
4.自动化集成:CaptainHook可以与版本控制工具(如Git)进行集成,对每次提交的代码自动进行检查,减少手动操作的工作量。
5.灵活易用:CaptainHook支持自定义规则,开发人员可以根据项目的特殊需求进行配置,灵活应对不同的开发场景和要求。
三、CaptainHook的工作原理CaptainHook的工作原理可以简单描述为以下几个步骤:1.配置规则:开发人员在项目中配置代码审查的规则,包括代码风格、命名规范、代码复杂度等方面的要求。
2.提交代码:开发人员通过版本控制工具将代码提交到代码库中。
3.触发CaptainHook:每次代码提交后,CaptainHook会自动触发,对提交的代码进行静态代码分析和检查。
4.检查代码:CaptainHook根据配置的规则,对提交的代码进行检查,发现潜在的问题和错误。
5.反馈结果:CaptainHook将检查结果展示给开发人员,包括错误信息、警告信息、建议等。
6.处理检查结果:开发人员根据CaptainHook提供的结果,进行代码修改和优化。
7.重新提交代码:开发人员根据修改后的代码重新提交,再次触发CaptainHook进行检查。
以上过程可以循环进行,帮助开发人员不断改进代码质量和开发效率。
灯塔 github cron表达式
灯塔 github cron表达式1.概述灯塔(Lighthouse)是一个自动化的持续集成和持续部署工具,它可以帮助开发人员更轻松地管理和部署他们的代码。
在灯塔中,cron表达式被广泛应用于计划任务和定时触发。
在github上,cron表达式是一个非常重要的概念,它可以帮助开发人员更好地控制和管理他们的代码仓库。
本文将介绍灯塔中github cron表达式的相关知识,帮助读者更好地理解和应用它。
2.什么是灯塔 github cron表达式cron表达式是一种跟时间相关的字符串,它可以表示一个时间点、一个时间段或者一个时间间隔。
在github中,cron表达式被用来设置定时触发任务。
灯塔可以根据cron表达式执行以下任务:定时构建、定时部署和定时触发其他自定义操作。
通过使用cron表达式,开发人员可以很方便地在github上管理和控制他们的代码仓库。
3.灯塔 github cron表达式的语法在灯塔中,github cron表达式的语法是受限的,它只能表示一个时间点或一个时间间隔。
github cron表达式的语法非常简洁明了,它由5个字段组成,分别表示分钟、小时、日期、月份和星期几。
每个字段都可以使用数字、星号(*)、逗号(,)、连字符(-)和斜杠(/)表示。
下面是github cron表达式的语法:- 分钟(0-59)- 小时(0-23)- 日期(1-31)- 月份(1-12)- 星期几(0-6)示例:`30 2 * * 1`表示每周一的凌晨2点30分触发任务4.如何在灯塔中使用github cron表达式在灯塔中,使用github cron表达式非常简单。
在代码仓库的设置页面,可以找到“定时触发任务”或“定时构建”等选项,点击进入设置页面,就可以看到cron表达式的输入框。
在输入框中输入合法的cron表达式,点击保存即可。
灯塔会根据cron表达式在指定的时间触发任务,从而执行定时构建、定时部署等操作。
iohook 用法 -回复

iohook 用法-回复如何使用iohookiohook是一个用于监听和发送键盘和鼠标事件的开源库。
它可以被广泛应用于自动化工具、游戏开发、系统监控等领域。
在本篇文章中,我将一步一步地介绍如何使用iohook。
第一步:安装iohook首先,我们需要安装iohook。
在终端或命令提示符中,输入以下命令来安装iohook:npm install iohook这会将iohook模块安装到您的项目中。
第二步:导入iohook模块要使用iohook,我们需要在我们的代码中导入它。
在您的JavaScript文件的开头添加以下代码:const ioHook = require('iohook');这将使iohook模块在我们的代码中可用。
第三步:监听键盘事件接下来,我们将使用iohook来监听键盘事件。
可以通过注册回调函数来处理接收到的事件。
以下是一个简单的示例,演示了如何监听按键事件:ioHook.on('keydown', event => {console.log(event);});此示例将在控制台中打印出按键事件的详细信息。
第四步:监听鼠标事件除了监听键盘事件之外,iohook还可以监听鼠标事件。
以下是一个示例,演示了如何监听鼠标左键按下事件:ioHook.on('mousedown', event => {if (event.button === 1) {console.log('Left mouse button pressed');}});这个示例将在左键按下时打印出一条消息。
第五步:启动事件监听在您的代码中,添加以下命令来启动iohook的事件监听:ioHook.start();这将启动iohook并开始监听键盘和鼠标事件。
第六步:添加事件处理逻辑在您的代码中,您可以根据需要添加事件处理逻辑。
例如,您可以根据接收到的事件来执行不同的操作,或者记录事件信息以备日后使用。
汽车加热器故障代码说明书

— — —Diagnosis not possible• Adapter cable not connected properly.• Diagnostic connection damaged.•Test ECU. Replace if necessary.000 No faults — —005 Warning• Check connection and / or lead for continuity, short circuit and Short circuit in "Burglar Alarm" output damage.009 ADR / ADR99 shutdown • Switch the heater off and then on again.010 Overvoltage cutoff Overvoltage applied to control box for at least 6 seconds.• Disconnect heater / cable harness plug-in connector, startthe vehicle engine, measure the voltage. Connector B2, PINA2 and A3:– If the voltage is >15 volt or >30 volt, check the generatorregulator and / or the battery.011 Undervoltage cutoff Undervoltage applied to control box for at least 20 secondswithout interruption.• Disconnect heater / cable harness plug-in connector, start thevehicle engine, measure the voltage. Connector B2, PINA2 and A3:– If the voltage is <10 volt or <20 volt, then check the fuses,the supply cables, the negative connections and the positivesupport point at the battery for voltage drop (corrosion).012 Overheating Overheating sensor signals temperature greater than 120°C.• Measure the resistive value of the overheating sensor,connector B1, PIN 2 and 4, for measured values.See page 44.– If overheating sensor ok, check connection leads for conti-nuity, short circuit and damage. Vent air from system.014 Possible overheating dettected Difference between measured value in overheating sensor and (Temperature difference evaluation)temperature sensor is too great.• Measure the resistive value of the temperature sensor,connector B1, PIN 2 and 4 and connector B1 PIN 1 and 2; formeasured values. See page 44.– If temperature sensor ok, check connection leads forcontinuity, short circuit and damage.Vent air from system.015 Too many overheats,Control box locked due to too frequent overheating (fault code Control box is locked012 or 014) in succession.• Unlock the control box by deleting the fault memory, seepages 16 and 25.017 Overheating,Max. temperature exceeded at the overheating sensor (180°C).Sensor threshold exceeded• Check overheating sensor —> fault code 012.• Check control box.019 Glow plug 1,Glow plug 1 energy input is too low (< 2000 Ws)Ignition energy too low• Check glow plug for continuity, short circuit and damage—> Fault code 020.• Check control box.020Glow plug 1, interruption• Measure cold resistance of the glow plug at approx. 20°Cambient temperature – connector B1, PIN 7 and 10.021Glow plug 1, overload / short circuit If the values are as follows the glow plug is ok, if the values downstream of (–)differ – replace the glow plug.022Glow plug 1, short circuit downstream Measured value:of (+)• 12 volt – glow plug = 0.42 – 0.6 ohm• 24 volt – glow plug = 1.2 – 1.9 ohm– If the glow plug is ok, check the lead harness of the glow plugfor continuity, short circuit and damage.023Glow plug 2, interruption• Measure cold resistance of the glow plug at approx. 20°Cambient temperature – connector B1, PIN 11 and 14.024Glow plug 2, overload / short circuit If the values are as follows the glow plug is ok, if the values downstream of ground differ – replace the glow plug.Measured value:• 12 volt – glow plug = 0.42 – 0.6 ohm• 24 volt – glow plug = 1.2 – 1.9 ohm– If the glow plug is ok, check the lead harness of the glow plugfor continuity, short circuit and damage.025Diagnostic line fault• Check diagnostics cable for continuity, short circuit and Heater remains ready for operation damage – connector B2, PIN B4.– if ok, check control box.026 Glow plug 2, short circuit downstream see fault code 023 / 024of (+)029 Glow plug 2, Ignition energy too low Glow plug 2 energy input is too low (< 2000 W)• Check glow plug for continuity, short circuit and damage.—> Fault code 023.• Check control box.031 Burner motor, interruption • Check the burner motor's connection leads for continuity, shortcircuit and damage – connector B1, PIN 3, 6 and 9. 032 Burner motor, overload• Check burner motor for easy movement by manually rotatingthe impeller.– if not smooth running, remove the blockage.033 Burner motor, speed error / blocked– if ok, check control box / blower unit.034 Burner motor short circuitdownstream of (+) or (–)037 Water pump not working • Check water pump.Apply voltage to the water pump – connector B1, PIN 12 and 13(power input = max. 4 A or 2 A)– If water pump does not rotate, replace water pump.– If water pump is ok –> check control box / blower unit.041 Water pump, interruption • Check the water pump's connection and lead harness for con-tinuity, short circuit and damage – connector B1, PIN 12 and 13.– If ok, check water pump —> fault code 037.042 Water pumpOverload short circuit Water pump running dry.043 Water pump• Vent heater (water shortage), check water flow rate.Overload downstream of +047 Metering pump• Check the metering pump's connection and lead harness for Overload short circuit continuity, short circuit and damage – connector B2, PIN A1.– If ok, check the resistance of metering pump– setpoint valueapprox. 20 ohm.048 Metering pump interruption049 Metering pumpOverload downstream of +Ub050 Too many attempted starts Control box locked due to repeated switching on in succession Control box is locked without flame detection (fault code 052).• Check fuel supply, exhaust and combustion air system.• Check glow plug –> see fault code 019 to 024 / 026 / 029.• Check flame sensor –> fault code 064 / 065.• Unlock the control box by deleting the fault memory.052 Exceeding of safety time No flame detected within the start phase. Flame sensor value <80°C, therefore automatic shutdown because safety time exceeded.• Check fuel supply, exhaust and combustion air system.• Check glow plug –> see fault code 019 to 024 / 026 / 029.• Check flame sensor –> fault code 064 / 065.053 Flame cutout in Heater ignited (flame detected) and signals flame cutout during a "POWER" control stage power stage.• Check fuel quantity, blower speed, fuel supply, exhaust and com-bustion air system.054 Flame cutout in "HIGH" control stage• Check flame sensor –> fault code 064 / 065.055 Flame cutout in "Medium" control stage(D 8 W / D 10 W) "Medium1" control stage(D 12 W)056 Flame cutout in"Medium 2" control stage (D 12 W)057 Flame cutout in"Medium 3" control stage (D 12 W)058 Flame cutout in "LOW" control stage059 Too rapid rise in water temperature • Vent air from system, check water flow rate.• Check temperature sensor –> fault code 060 / 061060Temperature sensor interruption Temperature sensor signals temperature value outside themeasuring range.061Temperature sensor short circuit•Measure the resistive value of the temperature sensor,Connector B1, PIN 1 and 2; for measured values. See page 44.– If temperature sensor ok, check connection leads forcontinuity, short circuit and damage.064Flame sensor interruption Flame sensor signals temperature value outside the measuringrange.065Flame sensor short circuit• Measure the resistive value of the flame sensor – connector B1,PIN 5 and 8; for measured values. See page 45.– If flame sensor ok, check connection leads for continuity, shortcircuit and damage.071Overheating sensor interruption Overheating sensor signals temperature value outside the mea-suring range.• Check overheating sensor –> fault code 012.072Overheating sensor short circuit074 Overheating detection hardware is• Control box is defective.defective, operating lock-out Replace control box / blower unit.090 External reset •Control box reset by external interference voltage.Check voltage supply, e.g. battery, leads, generator, fuses.091 Internal reset •Internal control box fault, replace control box / blower unit. 092 ROM error093 RAM error, at least one RAM cell isnot working094 EEPROM error, checksum error withinthe area of the operating data, diagnosticparameters or calibration values095 Invalid data record, checksum error096 Internal temperature sensor is defective/ ECU too hot097 Internal device error098 Main relay is faulty099 Too many resets, operating lock-out。
Emission Control
Emission Control
SOURCES OF VEHICLE EMISSONS
•Engine Crankcase Blow-by Fumes (20%)– heating oil and burning of fuel that blows past piston rings and into the crankcase.
•Fuel Vapour (20%) – chemicals that enter the air as fuel evaporate.
•Engine Exhaust (60%)- blown out the tailpipe when engine burns a hydrocarbon based fuel.
Emission Control
Oxides of Nitrogen (NOx)
•Produced by extremely high temperatures during combustion.
•Air consist of about 79% nitrogen and 21% oxygen.
Carbon Monoxide (CO)
•Extremely toxic emission resulting from the release of partially burned fuel (incomplete combustion of petroleum-based fuel). •CO prevents human blood cells from carrying oxygen to body tissue. •Symptoms are headaches, nausea, blurred vision, and fatigue. •A rich air-fuel would increase CO; lean air-fuel mixture would lower CO emissions.
创意计算软件 Sol-20 CS-8001 空气交通控制员说明书

CreativeComputingSoftwareSOL-20 CS-8001AIR TRAFFIC CONTROLLERby David ManneringMade in U.S.A.CREATIVE COMPUTING SOFTWARE.Morristown, NJ 07960ATCAIR TRAFFIC CONTROLCOMPUTER GAMEFOR SOL-20 COMPUTERAir Traffic Controller (ATC) is a machine language simulation for the Sol-20 of the situation faced by an air traffic controller. The program is loaded from the monitor. When you turn the Sol-20 on, you will see the > prompt. Type XEQ and press RETURN to begin loading the tape. If you receive a "Load Error," try adjusting the volume and/or tone controls on the tape recorder.After the program loads properly, you will see the radar display. To begin the game, select the number of minutes you wish to play (between 16 and 99). This is the amount of time you have to process all twenty-six aircraft. After typing the number of minutes, press RETURN. The simulation will then begin.The record time for successfully completing this simulation stands at 21, which is truly outstanding. Novice Air Traffic Controllers should try a time of 65 or higher to start.The SituationYou are an air traffic controller with the responsibility for the flow of air traffic within an area of 15 x 25 miles, from ground level to 5,000 feet altitude. Within this area are two airports, two navigational aids, and ten entry/exit fixes (see attached diagram). During the course of the game 26 aircraft will become active inside this area. Your specific responsibility is to guide each of these aircraft to its predetermined destination within certain time and safety restrictions.The ScreenThink of the screen as a computer-assisted radar scope. The dots are mile markers, and the distance between two adjacent dots, either vertically, horizontally, or diagonally, is one mile. The airports, navaids, and entry/exit fixes are depicted on the screen in their proper locations. An aircraft will appear on the screen-as a capital letter, which is the aircraft's call-sign, followed by a single decimal digit, which is the aircraft's altitude in thousands of feet. The call-sign will always be centered on a mile marker.In the lower left corner of the screen, below the radar area, is the instruction display area. When you enter an instruction on the keyboard it will appear here. To the right of this area is the status display area. This area will display responses to instructions and game status information. The game clock is in this area. To the right of the radar area, stretching from the top to the bottom of the screen, is the aircraft information area. This area will display aircraft speed, destination, fuel supply, and other timely information.AircraftSpeed: An aircraft is either a jet, which flies 4 miles per minute, or a propeller craft which flies 2 miles per minute. The radar display is updated every 15 seconds. Each jet, then, will move one mile per update, and propeller craft will move one mile every second update.Altitude: Aircraft remain in level flight unless you instruct them to climb or descend. In level flight they are always at multiples of 1,000 feet. They climb or descend at the rate of 1,000 feet per mile. The altitude readout (the digit next to the call sign) gives an accurate indication of the aircraft's altitude up to 9,000 feet (Aircraft above that altitude are extremely rare). Aircraft flying at 0 altitude are in landing configuration; i.e., they will accept no further altitude or heading instructions.Heading: Aircraft may fly vertically, horizontally, or diagonally on the screen. Aircraft flying toward the top of the screen are considered to be heading north. Turn instructions are issued in multiples of 45 degrees. Aircraft will fly in a straight line unless instructed otherwise. Aircraft may turn at the rate of 45 degrees per mile except when making an instrument approach to an airport, at which time they make a turn of up to 180 degrees while over a navaid.Active/Inactive: An inactive aircraft is one that has not yet entered or has already left your control area. The computer randomly determines at what time during the game each aircraft becomes active. You may display certain information on inactive aircraft, but you may not issue them instructions.Fuel: Jets have enough fuel to last 15 minutes after they become active, while propeller craft have enough for 21 minutes. Active departures waiting on the ground for take-off instructions use fuel at the same rate as if they were airborne.Arrivals/ Departures: Aircraft can enter your area in one of two ways: They can fly in from one of the entry/ exit fixes, or they can begin on the ground at one of the airports. Conversely, aircraft can leave your control area by flying out via an entry/exit fix or by landing at one of the airports. Aircraft which enter via an entry/exit fix are called arrivals, and they will initially fly directly toward the opposite fix on the screen (opposite fixes are nine's complements, i.e., they add up to 9). This flight path will take it directly over a navaid. If its destination is the opposite fix it will continue straight ahead. If its destination is an airport it will hold (circle) at the navaid (this assumes that you have not instructed it to do otherwise). Departures become active on the ground at an airport, but will not become airborne until you give the instruction to do so. After it is instructed,-to take off it will appear airborne one mile from the airport flying on the approach heading for that airport. It will be at 1,000 feet at climbing toward its assigned altitude.General: Aircraft are updated in alphabetical order. When two or more aircraft occupy the same position on the screen, the last one updated will be displayed regardless of altitude.RequirementsAll aircraft with destinations of entry/exit fixes must exit via their proper fix (it must be the last position occupied before they leave the screen) and they must be level at 5,000 feet at that fix. Failure to meet these conditions results in a boundary error.All active aircraft must be separated by at least 3 miles or at least 1,000 feet of altitude at all times. Failure to adhere to this separation results in a conflict error. Aircraft that are climbing or descending are considered to be at both their old and new altitude for conflict purposes. Departures assigned take-off instructions but not yet airborne are at 0 altitude. Updates occur in alphabetical order with each aircraft checked against all other aircraft which are assumed to be stationary in position and altitude.An aircraft must reach its destination before it runs out of fuel.All aircraft must reach their destinations before the game clock reaches 0 .A landing aircraft must be landing at its destination airport, level at 0 altitude, and flying the approach heading for the airport (see approach headings). Failure to meet these conditions will cause a "go around" when the aircraft reaches an airport. A "go around" results in the aircraftclimbing or descending to 1,000 feet and continuing on its last issued heading. Aircraft are assumed to be landing at the first airport encountered after an "A0" instruction (see instructions). This is the only error that will not end the game.InstructionsTo issue an instruction to a specific aircraft, first enter the aircraft's call sign (a capital letter), then enter the letter signifying the type of instruction (A for altitude, L for left turn, R for right turn), then enter a digit to indicate the magnitude of the instruction (0-5).After being given an "A" instruction, the aircraft will climb or descend at the rate of 1,000 feet per mile until reaching the assigned altitude. The top of your area is 5,000 feet, and you will be unable to climb an aircraft higher than that; however, all arrivals will enter your area above 5,000 feet and you may leave them at their initial altitude as long as you want. When you descend them they cannot be stopped before reaching 5,000 feet (most arrivals will be at 6,000', but to avoid conflicts the computer assigns aircraft due to become active within two minutes of another at the same fix different altitudes). "A0" causes the aircraft to descend to 0 altitude, but it also causes the aircraft to ignore all further instructions. It should only be issued when the aircraft is about to land.To instruct an aircraft to take-off, you merely assign it an altitude (do not assign it 0). It will become airborne on the next appropriate update and climb to the assigned altitude on the approach heading for the airport. After being issued an "L1-L4" instruction the aircraft will continue straight ahead for one mile, then turn left at the rate of 45 degrees per mile until the assigned turn is completed. The "L0" instruction causes the aircraft to fly straight ahead until encountering a navaid, at which time it begins to make continuous left 45 degree turns, which results in it flying in a circle which intersects the navaid (see diagram). This is known as holding. It will continue to hold until instructed to do otherwise. The "L5" instruction causes the aircraft to fly straight ahead until encountering a navaid, at which time it assumes the approach heading for X airport. It assumes this heading immediately, not at the rate of 45 degrees per mile.The "R1-R4" instruction works just like "L1-L4" except the turns are toward the right. The "R0," instruction causes the aircraft to fly straight ahead. This is useful for allowing an aircraft to fly over a navaid it was previously assigned to hold at, and to stop turns before they are completed. The "R5" instruction works just like "L5" except the heading assumed is the approach heading for X airport.Here is a chart of aircraft instructionsA L R0Descend to 0'Hold at ContinueCleared to land Navaid Straight ahead1Climb/Descend Turn left Turn rightto 1,000'45 degrees45 degrees2Climb/Descend Turn left Turn rightto 2,000'90 degrees90 degrees3Climb/Descend Turn left Turn rightto 3,000'135 degrees135 degrees4Climb/Descend Turn left Turn rightto 4,000'180 degrees180 degrees5Climb/Descend Cleared for Cleared forto 5,000'X Approach X ApproachApproach headings: The approach heading for X airport is due west, toward fix 9; for the X airport it is northwest, toward fix 2. All landings must be made on these headings and all departures will be made on these headings. You may assign a turn to a departure after it is cleared for take-off, but not before.If an aircraft is already holding, "L0" has no effect, "L5" and "R5" cause the appropriate heading to be assumed when the aircraft next reaches the navaid in its holding circle. All other instructions operate as normal. All inbounds have been initially assigned to hold.Information RequestsTo request information on a specific aircraft, enter the aircraft's call sign, then press "RETURN." The information will appear at the bottom of the information area on the screen, to the right of the clock, in the following formatCall sign, speed, altitude,(space), initial airport or fix,(arrow), destination, (space),heading, (space), fuelThe speed will either be "j" for jet or "p" for prop. Altitude is in thousands of feet. Airports and fixes are as displayed on the map (If the aircraft is active, its current position, which may be a dot, will be displayed instead of its initial position). Heading is displayed as one or two lowercase letters (n is north, ne is northeast, etc.). Fuel is displayed in minutes remaining, and will be a plus if it's 10 or more.Here is an example: Bj67 --> X sw 9This request may be made of active or inactive aircraft.One minute before inbounds and overflights become active, they will appear in the aircraft information area in the above format. You will then have one minute to prepare for their arrival on the screen. Departures will appear in the information area as they become active. You may then clear them for take-off if you wish, or you can leave them on the ground. They will stay in the information area until cleared. Arrivals and overflights disappear from the information area as soon as they appear in your control area. You must then do a specific information request if you have forgotten where they were going or if you want a fuel check. ResponsesAfter entering an instruction or information request, press the RETURN key. If your entry has been processed it will be acknowledged with "ROGER" in the status area. If you attempt to issue an instruction to an inactive aircraft, to an aircraft after it has been given an "A0" instruction (unless it has performed a "go around"), or a turn to a non-cleared-takeoff departure, <--unable- will appear in the status area. No further entries will be processed until the status area is cleared, which you can do by pressing any key, or by letting it cIear automatically in a few seconds.You will be unable to enter any character which is not part of an instruction or request. To delete an entry before RETURN has been pressed, press any key that will not make a legal command.No entries may be made during an update, which lasts less than a second. Once you begin an entry you will have only a few seconds to complete it before the computer clears it from the instruction area. If you do not receive a "ROGER," your entry was not processed.ClockAt the beginning of the game you are asked to enter a clock setting. This must be a decimal number between 16 and 99. After entering the setting, press the return key and the game begins. You will be unable to enter an illegal setting, and pressing any key but RETURN will delete your entry. The first clock advance comes in about 15 seconds. After that they are (approximately) one minute apart.No aircraft becomes active until the clock has advanced once. This gives you enough time to study the arrivals due in one minute. No aircraft becomes active during the last 15 minutes of the game. This is to give you time to handle all aircraft before the time runs out.Entries made during a minute will affect clock speed. In no case may more than 16 entries be .made in a single minute. To speed up the clock during periods when nothing is happening, tap the space bar until the clock advances.Since 26 aircraft become active regardless of game length, it follows that the smaller the initial clock setting, the more difficult the game. In practice, settings above 60 or so tend to produce a dull game, whereas settings below about 20 are nearly impossible to win. 99 is good only for getting the feel of an aircraft without worrying about conflicts. Of course, the pseudo-random number generator sometimes produces extremely unusual and challenging games at any setting.End of GameThe game ends with one of the following indications:BOUNDARY ERRORX CONFLICT XFUEL EXHAUSTED= =TIME=LIMIT= =* * *SUCCESS* * *The first three will be followed by the call sign of the aircraft involved. In the case of conflict both aircraft involved will be displayed, and the position in your control area where the conflict occurred will be occupied by the conflict marks Z7Z7. The conflicting aircraft will remain in its old position next to the marks to show you the move that caused the conflict.Following the above will be the number of aircraft, both active and' inactive, that you failed to get to their destinations.Pressing any key will exit the program and return control to SOLOS. To play another game you must EX 0 . To end the game at any time enter a dollar sign ($).Map Area. . . . . 1 . . . . 2 . . . . . . . 3 . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .4 . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . X. . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .0 . . . . O . . . . X . . . . . . . O . . . . . 9. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 8 . . . . . 5 . . . . . . 6 . . . . . 7. Mile Marker0-9Entry/Exit firesX X AirportsO Navaid id- - -Typical Holding Pattern (not depicted on screen)CREATIVE COMPUTINGSOFTWAREMany other software cassettes and floppy discs are available from Creative Computing Software. If your dealer does not carry the full line, send a selfaddressed stamped envelope for the latest software releases flyer.CREATIVE COMPUTINGMAGAZINECreative Computing is the Number 1 magazine of software and applications bringing you over 144 pages of new material every month. Subscriptions in the USA cost $15 for 1 year, $28 for 2 years or $40 for 3 years. Add $9 per year to these rates for foreign surface postage or $24 per year for airmail. Send payment with order to:Creative ComputingP.O. Box 789-MMorristown, NJ 07960。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
No-Jerk Skyhook Control Methods for Semiactive SuspensionsMehdi AhmadianProfessor,Fellow ASME,Center for Vehicle Systems and Safety,Department of Mechanical Engineering,Virginia Tech,Blacksburg,V A24061Xubin SongMem.ASME,Visteon Corporation,6100Mercury Dr.,Dearborn,MI48126Steve C.SouthwardMem.ASME,Lord Corporation,100Lord Drive,Cary,NCThis paper presents two alternative implementations of skyhook control,named‘‘skyhook function’’and‘‘no-jerk skyhook,’’for reducing the dynamic jerk that is often experienced with conven-tional skyhook control in semiactive suspension systems.An analysis of the relationship between the absolute velocity of the sprung mass and the relative velocity across the suspension are used to show the damping-force discontinuities that result from the conventional implementation of skyhook control.This analysis shows that at zero crossings of the relative velocity,conventional skyhook introduces a sharp increase(jump)in damping force, which,in turn,causes a jump in sprung-mass acceleration.This acceleration jump,or jerk,causes a significant reduction in iso-lation benefits that can be offered by skyhook suspensions.The alternative implementations of skyhook control included in this study offer modifications to the formulation of conventional sky-hook control such that the damping force jumps are eliminated. The alternative policies are compared to the conventional skyhook control in the laboratory,using a base-excited semiactive system that includes a heavy-truck seat suspension.An evaluation of the damping force,seat acceleration,and the electrical currents sup-plied to a magnetorheological damper,which is used for this study,shows that the alternative implementations of skyhook con-trol can entirely eliminate the damping-force discontinuities and the resulting dynamic jerks caused by conventional skyhook con-trol.͓DOI:10.1115/1.1805001͔IntroductionThe idea of skyhook control has been in existence for more than three decades.Introduced by Crosby and Karnopp͓1,2͔,sky-hook control has been studied most often for vehicle-suspension applications.Suspension systems with skyhook control draw a small amount of energy to operate a valve that adjusts the damp-ing force;therefore,they are referred to‘‘semiactive’’suspensions or dampers.The damper valve can be a mechanical element͑as is the case for mechanically adjustable dampers͒or afluid valve that takes advantage of the rheological changes of the damperfluid, such as a magnetorheological͑MR͒damper͓3,4͔.The virtues of semiactive suspensions versus conventional,pas-sive suspensions have been addressed in several past studies ͓5–11͔.Using various analytical methods,these studies have con-cluded that in nearly all cases of semiactive suspensions can more effectively reduce vibration transmission across the suspension and control the suspended body͑or sprung mass͒,as compared to passive suspensions.Some of these studies have led to different control methods for semiactive suspensions,including several variations to skyhook control,which have been reviewed by Ivers and Miller͓12͔.Although there exists a large number of studies that provide a comprehensive analysis of the skyhook control method and its variations,very few studies have provided an analysis of the dy-namic jerk that is caused by the change in damping force in sky-hook systems.This study will provide a comprehensive analysis of the dynamic jerk that is induced by skyhook control.After a brief overview of skyhook control,we will provide two alternative formulations of skyhook control for eliminating dynamic jerk.Ad-ditionally,we will provide the results of a series of dynamic tests that compare the alternative methods to conventional skyhook control for a test setup that includes a single-degree-of-freedom ͑dof͒base-excited system with a magnetorheological damper. BackgroundFor a semiactive suspension,the equations governing skyhook control can be described byͭV1V12Ͼ0F saϭG s V1V1V12Ͻ0F saϭ0(1)whereV1ϭabsolute velocity of the sprung massV12ϭrelative velocity across the suspensionF saϭskyhook damping forceG sϭa gain factor that is commonly used such that the full damping range of the skyhook damper can be usedSkyhook control,which is illustrated in Fig.1,indicates that when the absolute velocity of the sprung mass and the relative velocity across the suspension have the same sign,the damper is resisting the motion of the sprung mass and a damping force pro-portional to the sprung mass velocity is desired.Otherwise,the damping force does not resist the motion of the sprung mass and must be minimized.This logic emulates the ideal configuration of a passive damper‘‘hooked’’between the sprung mass and an imaginary‘‘sky,’’hence,the name‘‘skyhook.’’Problem StatementIn order to better highlight the dynamic jerk problem due to the skyhook control,we will evaluate a three-dimensional surface plot of Eq.͑1͒,as is shown in Fig.2.Thefigure clearly indicates that in the second and fourth quardrants,when the relative and abso-lute velocities have opposite signs,the damper force is zero.Oth-erwise it is proportional to the absolute velocity.Figure2also shows that the damping force jumps sharply at the transitions between the quardrants corresponding to the relative velocity zero crossings,which is further depicted in Fig.3.This force disconti-nuity causes acceleration jumps or jerks in various physical sys-tems,such as the single degree-of-freedom system shown in Fig. 4,which reptresents a heavy-truck seat suspension.Skyhook Function.The continuous equationC saϭI sϩe fϪeϪfI on e fϩI o f f eϪf(2)is proposed to represent the damping coefficient of the semiative suspension,which can be adjusted in real time.The constants I s and I on are such that they are small as compared to I o f f,i.e.,I sӶI o f fandI onӶI o f fContributed by the Technical Committee on Vibration and Sound for publicationin the J OURNAL OF V IBRATION AND A COUSTICS.Manuscript received November2003;final revision,February2004.Associate Editor:Lawrence A.Bergman.580ÕVol.126,OCTOBER2004Copyright©2004by ASME Transactions of the ASMEThe exponential power f represents the switching function of the semiactive suspension.In the case of skyhook control,it is a func-tion of relative and absolute velocity,i.e.,f ϭK v 1v 12(3)where K is a positive constant.In practice,the selection of the constants in Eqs.͑2͒and ͑3͒would be according to the force capabilities of the adjustible damper that is used for the semiactive suspension.Such selections,which must be done on a case-by-case basis,will have little effect on the comparison of the damper forces that will be dicussed later and,as such,will not be further elaborated on here.Figure 5shows a surface plot of the damping force with respect to the absolute and relative velocity.In Fig.5,it can be observed that smooth transition of the damping force from one quardrant to another is achieved,as compared to Fig.2.A similar difference can be observed between Figs.6and 3.Both Figs.5and 6indi-cate that the skyhook function control would cause substantially lower dynamic jerk.Based on Figs.2and 3,the approaches for reducing or elimi-nating the dynamic jerks could include:ing an analytic continuous function instead of the sky-hook control,shown in Eq.͑1͒,in order to avoid the damp-ing force discontinuity2.Modifing the skyhook control policy to enable smooth tran-sition of damper current,even when the damper is not at its true relative velocity zero crossing No-Jerk Skyhook.An alternative formulation to Eq.͑1͒for reducing dynamic jerk isC sa ϭͭK ͉V 1V 12͉V 1V 12у00V 1V 12Ͻ0(4)where K is a constant gain.This formulation is quite similar to the skyhook control shown in Eq.͑1͒,except that the dampingcoef-Fig.1Skyhook damping forceillustrationFig.2Surface plot of damper force for conventional imple-mentation of skyhook control using a ratefilterFig.3Damping force discontinuities resulting from conven-tional implementation of skyhook control using a ratefilterFig.4A single-dof base-excited system:…a …schematic model,…b …physical system in the form of a heavy-truck seat suspen-sionJournal of Vibration and Acoustics OCTOBER 2004,Vol.126Õ581ficient is a function of both absolute and relative velocity.As is shown in Figs.7and 8,including the relative velocity in skyhook control formulation eliminates damping force discontinuity and dynamic pared with Fig.2,Fig.7shows that the damp-ing force has a smooth transition between the four quadrants.The same phenomenon is observed in comparing Figs.3and 8.Of course,reducing the force discontinuity reduces dynamic jerks,as will be shown in our laboratory test results,which are included in the next sections.Test SetupThe truck-seat suspension with a magnetorheological damper,shown in Fig.4,is used for laboratory evaluation of the methods that were suggested earlier for reducing jerk.The test setup that was used for this study is shown schematically in Fig.9,and further documented by Song ͓13͔and Reichert ͓14͔.The seat is excited at the base by a hydraulic actuator with a force capacity of 2000lb.The sprung mass is supported on a suspension that con-sists of an airspring and an adjustable magnetorheological ͑MR ͒damper.The airspring has a linear spring constant within the range of the relative displacement that was used in our tests.The MR damper force is directly proportional to the current supplied to the damper.An MR damper was used instead of amechanically adjustable damper because of its availability,ease of use,and the growing trend of using such dampers for suspension applications.A standard input profile known as ISO Class 2Excitation ͑also known as ‘‘ISO2Excitation’’͒,documented in ͓15͔,was used for exciting the system.The absolute velocity needed for skyhook control was derived from an accelerometer on the sprung mass.The relative velocity across the suspension was estimated from the relative displacements across the suspension,which was mea-sured by a rotary sensor that was mounted at the cross-pivot of the scissor suspension,for the truck-seat suspension in Fig.3.Test ResultsThe test results are shown in Figs.10–13.These figures show the results of three different implementation of the skyhook con-trol that are described below,using the terminology that we have selected for this study:1.‘‘Rate Skyhook,’’is the implementation of the skyhook con-trol in Eq.͑1͒,using a rate filter that is able to estimate velocity across the suspension from relativedisplacementFig.5Surface plot of damper force for implementation of sky-hook control using skyhookfunctionFig.6Elimination of damping force discontinuties due to us-ing skyhookfunction Fig.7Surface plot of no-jerk skyhook control damperforceFig.8Elimination of damping-force discontinuities due to us-ing no-jerk skyhook formulation582ÕVol.126,OCTOBER 2004Transactions of the ASMEmeasurement,as described earlier.This is the implementa-tion of skyhook control frequently adopted for vehicle sus-pensions and similar systems.2.‘‘Skyhook Function,’’described by Eqs.͑2͒and ͑3͒,is one of the two alternative implementations of skyhook control suggested in this study.3.‘‘No-jerk Skyhook,’’is the other suggested alternative implementation of skyhook control,described by Eq.͑4͒.First,we investigate the currents to the MR damper as shown in Figs.11–13.It is of no surprise that the skyhook function is quite similar to the no-jerk skyhook.Both control policies have a smooth transition of the current to the MR damper from the off to the on states because the new modified skyhook control policies take advantage of the fact that at least one velocity changes smoothly from the on to the off state ͑or vice versa ͒.They gener-ate a smooth dynamic response,as shown in Figs.10and 12.These figures show that both the no-jerk skyhook and skyhook function-control policies cause a relatively smooth dynamic re-sponse because they eliminate the damping-force discontinuity.ConclusionsTwo different implementations of skyhook control,named ‘‘skyhook function’’and ‘‘no-jerk skyhook,’’were suggested for reducing the dynamic jerk that is often experienced with conven-tional skyhook control in suspension systems.Through an analysis of the relationship between the absolute velocity of the sprung mass and the relative velocity across the suspension,we showed the source of force discontinuity in conventional implementation of skyhook control,called ‘‘rate skyhook,’’for the purpose of this study.This analysis showed that at the zero crossings of the rela-tive velocity,rate skyhook introduces a jump in the damping force that causes a jump in sprung mass acceleration.This acceleration jump,or dynamic jerk,causes a significant reduction in isolation benefits that can be offered by skyhook suspensions.Two alterna-tive implementations of skyhook control included in the study offer modifications to the formulation of conventional skyhook control such that the damping-force jumps are eliminated.One alternative policy introduced a continuous function that can be used in place of the conventional formulation of skyhook control,which is described as a bistate function in terms of the products of the absolute velocity of the sprung mass and the suspensionrela-Fig.9Implementation of skyhook control on a physical sys-tem representing a single-dof base-excited system with a semi-activesuspensionFig.10Sprung mass accelerations caused by different sky-hook control formulations in response to a 1.45Hz pure-tone baseexcitation Fig.11Comparison of electrical currents supplied to a mag-netorheological damper in a semiactive suspension in re-sponse to a 1.45Hz pure-tone baseexcitationFig.12Sprung mass accelerations caused by different sky-hook control formulations in response to a broadband …ISO2…base excitationJournal of Vibration and Acoustics OCTOBER 2004,Vol.126Õ583tive velocity.Another alternative policy maintains the bistate for-mulation of the conventional skyhook control,but introduces the relative velocity of the suspension in the force-switching formu-lation such that the force discontinuities are eliminated.The two alternative methods were compared with rate skyhook control,in terms of the relationship between the damper force and the relative and absolute velocities of the system in order to show the elimination of the force discontinuity at the zero crossings of the relative velocity across the suspension.Additionally,the alter-native policies were compared with conventional skyhook control using a laboratory setup that included a heavy-truck seat suspen-sion representing a base-excited single-dof system.An evaluation of the seat acceleration,as well as the electrical current supplied to the magnetorheological damper that was used for this study,clearly showed the elimination of jerk with the alternative sky-hook controls.References͓1͔Karnopp,D.C.,and Cosby,M.J.,1974,‘‘System for Controlling the Trans-mission of Energy Between Spaced Members,’’U.S.Patent 3,807,678.͓2͔Crosby,M.J.,and Karnopp,D.C.,1973,‘‘The Active Damper,’’Shock Vib.Bull.,43.͓3͔Carlson,J.D.,Catanzarite,D.M.,and Clair,K.A.St.,1995,‘‘CommercialMagneto Rheological Fluid Devices,’’International Conference On Electro-Rheological,Magneto rheological Suspensions and Associated Technology ,Sheffield.͓4͔Carlson,J.D.,and Chrzan,M.J.,1994,‘‘Magneto Rheological Fluid Damp-ers,’’Patent No.5,277,281.͓5͔Ahmadian,M.,and Marjoram,R.H.,1989,‘‘Effects of Passive and Semi-active Suspensions on Body and Wheelhop Control,’’mercial Veh.,98,pp.596–604.͓6͔Ahmadian,M.,and Marjoram,R.H.,1989,‘‘On the Development of a Simu-lation Model for Tractor Semitrailer Systems With Semiactive Suspensions,’’Proc.of the Special Joint Symposium on Advanced Technologies ,1989ASME Winter Annual Meeting,San Francisco,DSC13,ASME,New York.͓7͔Chalasani,R.M.,1986,‘‘Ride Performance Potential of Active SuspensionSystems—Part II:Comprehensive Analysis Based on a Full-Car Model,’’Pro-ceedings of the 1986ASME Winter Annual Meeting ,Los Angeles,ASME,New York.͓8͔Chalasani,R.M.,1986,‘‘Ride Performance Potential of Active SuspensionSystems—Part I:Simplified Analysis Based on a Quarter-Car Model,’’Pro-ceedings of the 1986ASME Winter Annual Meeting ,Los Angeles,ASME,New York.͓9͔Ahmadian,M.,1999,‘‘On the Isolation Properties of Semiactive Dampers,’’J.Vib.Control,5͑2͒,pp.217–232.͓10͔Krasnicki,E.J.,1980,‘‘Comparison of Analytical and Experimental Resultsfor a Semiactive Vibration Isolator,’’Shock Vib.Bull.,50.͓11͔Miller,L.R.,1988,‘‘An approach to Semiactive Control of Multiple-Degree-of-Freedom Systems,’’Ph.D.thesis,North Carolina State University,Raleigh,NC.͓12͔Ivers,D.E.,and Miller,L.R.,1991,‘‘Semiactive Suspension Technology:AnEvolutionary View,’’ASME Advanced Automotive Technologies ,DE-40,Book No.H00719-1991,ASME,New York,pp.327–346.͓13͔Song,X.,1999,‘‘Design of Adaptive Vibration Control Systems With Appli-cation to Magneto-Rheological Dampers,’’Ph.D.Dissertation,Virginia Poly-technic Institute and State University,Blacksburg,V A.͓14͔Reichert,B.A.,1997,‘‘Application of Magneto Rheological Dampers forVehicle Seat Suspensions,’’M.S.thesis,Virginia Polytechnic Institute and State University,Blacksburg,V A.͓15͔International Standards Organization,1994,‘‘Earth-Moving Machinery—Laboratory Evaluation of Operator Seat Vibration,’’Standard 7096,ISO.Fig.13Comparison of electrical currents supplied to a mag-netorheological damper in a semiactive suspension in re-sponse to a broadband …ISO2…base excitation584ÕVol.126,OCTOBER 2004Transactions of the ASME。