三洋驱动器调试参数(PY)
三洋伺服增益调整
三洋伺服增益调整步骤几个基本参数介绍KP1:位置环比例增益(Group0 02)FFGN:前馈增益(Group0 05)KVP1:速度环比例增益(Group0 12)TVI1:速度环时间参数(Group0 13)JRAT1:负载惯量比(Group0 14)TRCVGN:高跟随速度控制补偿增益(Group0 15)TCFIL1:转矩指令滤波器(Group0 20)四个陷波滤波器(A,B,C,D)TCNFILA:指令陷波滤波器A(Group1 20)TCNFILB:指令陷波滤波器B(Group1 22)TCNFDB:指令陷波滤波器B深度选(Group1 23)TCNFILC:指令陷波滤波器C(Group1 24)TCNFDC:指令陷波滤波器C深度选(Group1 25)TCNFILD:指令陷波滤波器D(Group1 26)TCNFDD:指令陷波滤波器D深度选(Group1 27)作用:用于抑制伺服共振点例如:系统分析后得到伺服共振点为1000HZ,可以在A,B,C,D陷波滤波器任意一个写入1000,可以达到抑制共振点的目的。
在手动调整模式下,最好从陷波滤波器B开始使用,因为在自动模式下得到的共振点会默认填写在陷波滤波器A,防止被覆盖。
滤波深度:共振点100HZ以上建议使用00,,800HZ~1000HZ建议使用01,500~800HZ建议使用02 ,500HZ以下建议使用03。
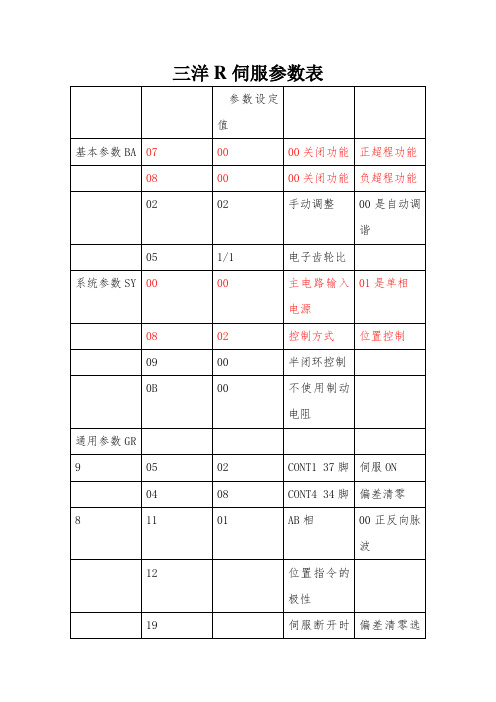
自动调整方式:1.设定相关参数在Group0选项内00设为Auto Tun02调整响应性(刚性)此功能在手动调整模式下无效03 设置为Auto Saving2.自动调整运行⑴点击菜单栏Auto Tuning,选择Auto Notch Filter Tuning⑵弹出窗口,设定Torque command 马达输出强度,开始设置为50%(后面慢慢往上加),然后按下图1,2,步骤操作⑶手动保存自动调整的结果选择Save Rseult of Auto Tuning 进入参数保存界面如下图1设定结束后是否提示报警。
三洋R伺服参数表及接线图
B
13
30
越小越好
14
越大越好
04
08
CONT4 34脚
偏差清零
8
11
01
AB相
00正反向脉波
12
位置指令的极性
19
伺服断开时清零
偏差清零选择
1
2
70
位置环
各轴设置一样
13
120
速度环
14
20.0
积分时间
15
惯量比
A
02
02运转Leabharlann 备结束时ON030A
42号脚接刹车 Z轴带刹车才设
C
00
01
增量式编码器
05
1/1
编码器分频比
06
1
三洋R伺服参数表
参数设定值
基本参数BA
07
00
00关闭功能
正超程功能
08
00
00关闭功能
负超程功能
02
02
手动调整
00是自动调谐
05
1/1
电子齿轮比
系统参数SY
00
00
主电路输入电源
01是单相
08
02
控制方式
位置控制
09
00
半闭环控制
0B
00
不使用制动电阻
通用参数GR
9
05
02
CONT1 37脚
伺服ON
山洋伺服马达参数设定
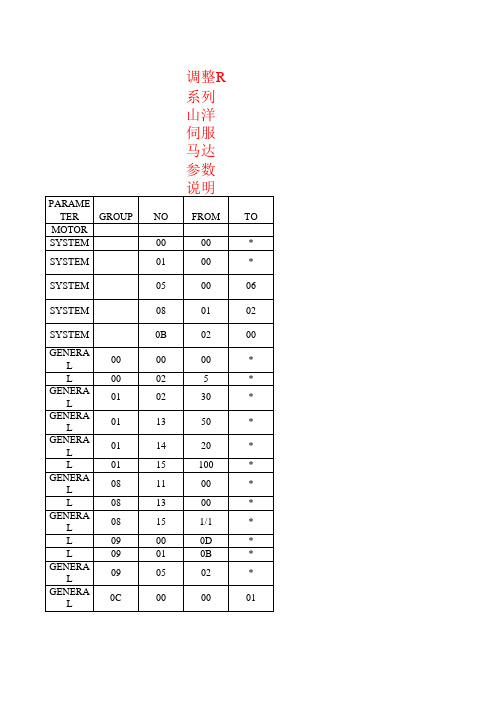
调整R 系列山洋伺服马达参数说明
注:“○”为必须设置项;“△”为根据实际需要选设项;“╳”为不适用
以上通常用到的伺服马达参数,若有不明白或者其它参数请参考使用说明书
编码器接线:粉红---1 紫色---2 棕色
蓝色---14 红色---19 黑色---20
是否有干扰判断:
观察Monitor display中OA,OC项数据是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变
要选设项;“╳”为不适用
不明白或者其它参数请参考使用说明书
棕色----13
黑色---20
是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变化,说明有外部干扰。
三洋RS1调试参数
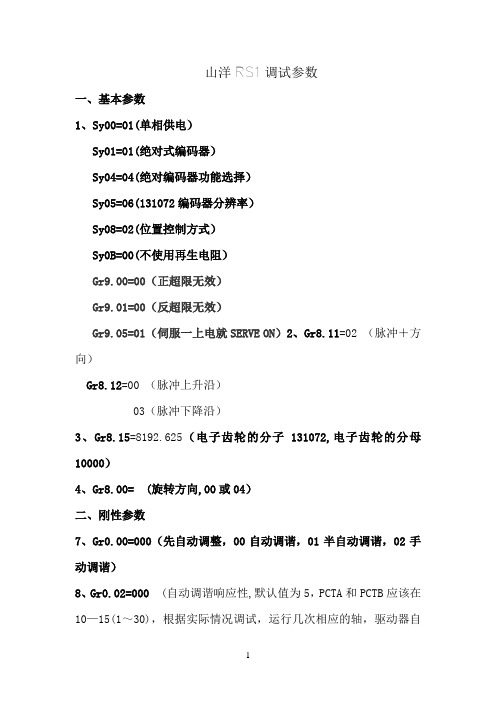
山洋RS1调试参数一、基本参数1、Sy00=01(单相供电)Sy01=01(绝对式编码器)Sy04=04(绝对编码器功能选择)Sy05=06(131072编码器分辨率)Sy08=02(位置控制方式)Sy0B=00(不使用再生电阻)Gr9.00=00(正超限无效)Gr9.01=00(反超限无效)Gr9.05=01(伺服一上电就SERVE ON)2、Gr8.11=02 (脉冲+方向)Gr8.12=00 (脉冲上升沿)03(脉冲下降沿)3、Gr8.15=8192.625(电子齿轮的分子131072,电子齿轮的分母10000)4、Gr8.00= (旋转方向,00或04)二、刚性参数7、Gr0.00=000(先自动调整,00自动调谐,01半自动调谐,02手动调谐)8、Gr0.02=000 (自动调谐响应性,默认值为5,PCTA和PCTB应该在10—15(1~30),根据实际情况调试,运行几次相应的轴,驱动器自动整定Gr1.15(转动惯量比JART1,默认值为100(0~15000)),Gr1.02(位置环增益KP1,默认值为30(1~3000)),Gr1.13(速度环增益KVP1,默认值为50(1~2000)),Gr1.14(速度环积分时常TV11,默认值为200(0.5~1000.0)),在运动过程中驱动器根据负载实时更改参数,所以在自动调整时相应的负载要装配完毕,否则自动整定后的参数不准确!9、Gr0.00=0002(对于PCTA和PCTB在联调出光完毕后,更改Gr0.00=0002(手动调整模式,固定转动惯量比),固化调谐参数。
二、刚性参数手动调节7、Gr0.00=002(先自动调整,00自动调谐,01半自动调谐,02手动调谐)Gr1.02=130(位置环增益KP1,默认值为30(1~3000))Gr1.13=110(速度环增益KVP1,默认值为50(1~2000)),Gr1.14=10(速度环积分时常TV11,默认值为200(0.5~1000.0)),Gr1.15=200(转动惯量比JART1,默认值为100(0~15000)),10、用手模联轴器就可以判断调整伺服刚性否合适!。
安川&山洋驱动器的调整
安川&山洋驱动器的调整1.伺服驱动概述2.常用参数的调整3.常见故障分析及解决一.伺服驱动概述伺服电机概述伺服系由三个反馈系构成( 位置环、速度环、电流环),越是内侧的环,越需要提高其响应性。
如果不遵守该原则,则会产生响应性变差或产生震动。
一般的说,不能使位置环的响应性高于速度环的响应性,不能使速度环的响应性高于电流环的响应性。
因此,当提高位置环增益时,首先需提高速度环增益。
如果只提高位置环增益,会引起速度指令震动,反而延长定位时间,电流环的增益一般不需要调整。
我们所用的HI800L系统都是模拟量控制的速度控制模式,安川电机和山洋电机都属于日系的伺服电机,电压等级都是三相220V或单相220V。
二.常用参数的调整参数号出厂设定功能描述备注Pn10040速度环增益Pn1012000速度环积分时间Pn1030惯性比单位:%Pn1100010调谐模式再次上电时有效设为:0012Pn20116384PG分频比再次上电时有效Pn300600速度指令输入增益单位:0.01V/额定转速设为:800Pn50A2100输入信号选择设为:8100 Pn50B6543输入信号选择设为:6548 Fn005参数初始化Fn009自动调整零漂Fn00A手动调整零漂安川SGDM(ΣⅡ系列)750W以上的电机常用参数如下表安川SGDM(ΣⅡ系列)面板操作器界面及按键说明安川SGDM(ΣⅡ系列)面板操作器模式调整方法注意事项:1.增益Pn100的调整,必须保证X轴与Y轴一致,否则切割出来的圆肯定不圆。
2.积分时间常数大致标准为Pn101≥2.3÷(2×π×Pn100)×100000,通常取Pn101=4÷(2×π×Pn100)×100000即可。
3.ΣⅡ系列惯性比Pn103的调整:先将Pn110改为0001,然后移动需要调整的轴,在移动过程中观察Fn007的值,按下DSPL/SET 键,显示闪烁一秒钟,惯性比的值得到保存,或者取中间值将此值写入Pn103中,恢复Pn110=0012即可。
利用PC读取sanyo(三洋) R系列伺服驱动器参数
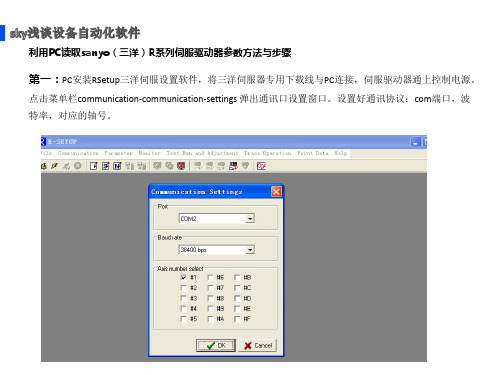
利用PC读取sanyo(三洋)R系列伺服驱动器参数方法与步骤
第一:PC安装RSetup三洋伺服设置软件,将三洋伺服器专用下载线与PC连接,伺服驱动器通上控制电源。
点击菜单栏communication-communication-settings 弹出通讯口设置窗口。设置好通讯协议:com端口,波 特率,对应的轴号。
parameter[amplifier->file],如左图,弹出parameter-transmit parameter窗口,点击browse将参数保存到一 个路径,点击execute,如右图
第四:将伺服驱动器参数上传至PC并保存为文件,点击R-setup软件菜单栏-parameter-transmit
parameter[amplifier->file],如左图,弹出parameter-transmit parameter窗口,点击browse将参数保存到一 个路径,点击execute,如右图
第五:查看伺服驱动器报警履历,点击菜单栏-monitor-alarm history display 弹出报警履历窗口,current
第二:点击R-setup软件菜单栏-c窗口。点击check,state
显示connected,表示三洋伺服驱动器与PC连接成功。
第三:将伺服驱动器参数上传至PC并保存为文件,点击R-setup软件菜单栏-parameter-transmit
三洋伺PY系列服控制器中文手册第五章

• • • • •
5-5
5. 安装
• 不能把连接器朝上安装,只能朝下安装。连接器(引线出口)朝下安装时,请给电缆以 一定松驰度以防止水(油)的侵入。 • 齿轮箱的油面高度要比油封唇部低(该高度只允许油溅到油封唇部上) 。 • 设置通孔以防止齿轮箱内压力升高。
� 相关机械的配合 • 按图 5-8 对电机轴与相关机械进行精密的同心配合。 尤其是使用刚性联接器时,微小偏心也可能造成输出轴受损伤,故务必保证同心。
运转时 轴向负荷(N) F 方向 10 10 10 10 10 50 30 30 30 3 3 3 8 10 20 2 3 3 8 8 8 10 10 10 20 20 20 20 35 50 50 50 50 F1 方向 10 10 10 10 10 50 30 30 30 3 3 3 8 10 20 2 3 3 8 8 8 10 10 10 20 20 20 20 35 50 50 50 50
5-9
5-1
5. 安装
5.1 伺服驱动器安装
参考伺服驱动器安装场所和方法 5.1.1 安装场所 参照下列来安装伺服驱动器。 实 例 注 意 事 项 由于内部机器的电耗及箱体的尺寸因素的 影响,在箱内的温度会比外界的温度高很 多。注意考虑箱的大小、冷却系统及布置方 法,以确保伺服驱动器的周围温度在 55℃ (131℉)以下。 为保证伺服驱动器的寿命和高可靠性, 推荐 箱内温度在 40℃(104℉)以下使用。
图 5-4
5-4
5. 安装
� 防 潮 伺服电机作为一个独立单元,符合 IEC 标准(IEC34-5) 。然而,该标准需在过一段时 间后进行性能检查。下列防潮措施在实际应用中很有必要。小心处理该系统,否则连 接器外壳会受损,降低防水功能。 P8 系列电机和航空插头型的 P1、P2 和 P6 系列电机使用一个防水的连接器或在航空连 接器的另一侧接一个导管,就可等同于 IP67。 P3 系列电机和法兰为 30mm 和 40mm 的 P5 系列电机的防水性等同于 IP40,法兰为 50mm, 70mm 和 80mm 的 P5 系列电机防水性等同 IP55。 连接器(导线出口)向下的角度范围如下图。 防护罩要面向水(油)飞溅方向安装。 防护罩应倾斜,使水(油)不会积滞。 避免电缆浸入水(油)中。 为了不使水侵入电机,防护罩外的电缆要带有一定松弛度。
沈阳三洋调试资料

沈阳三洋电梯主板调试说明SM-01-E输入输出接口定义:★ JP1, JP2, JP3 为外部开关信号输入口,公共端为JP3-7、8JP1.01: 输入 X0,检修信号,断开为检修,闭合为自动JP1.02: 输入 X1,上行信号. 在检修时闭合为点动上行,在司机时闭合为上行换向JP1.03: 输入 X2,下行信号. 在检修时闭合为点动下行,在司机时闭合为下行换向JP1.04: 输入 X3,上行多层终端换速开关, 2 米/秒以上电梯要求使用,(低速电梯不用此信号时,请设置输入类型 X3 为常开)JP1.05: 输入 X4,下行多层终端换速开关, 2 米/秒以上电梯要求使用,(低速电梯不用此信号时,请设置输入类型 X4 为常开)JP1.06: 输入 X5,上行限位开关JP1.07: 输入 X6,上行限位开关JP1.08: 输入 X7,上行单层终端换速开关.JP3.09: 输入 X8,下行单层终端换速开关.JP1.10: 输入 X9,上平层干簧JP2.1: 输入 X10,下平层干簧JP2.2: 输入 X11,调速器故障输出信号JP2.3: 输入 X12,消防开关JP2.4: 输入 X13,安全回路继电器检测JP2.5: 输入 X14,门锁回路继电器检测JP2.6: 输入 X15,调速器进线接触器检测JP2.7: 输入 X16,调速器出线接触器检测JP2.8: 输入 X17,抱闸继电器检测JP2.9: 输入 X18,门区信号输入,用于开门再平层和提前开门,闭合有效JP2.10: 输入 X19,调速器运行信号检测,检测到此信号闭合则抱闸可以张开JP3.01: 输入 X20,提前开门继电器检测JP3.02: 输入 X21,备用JP3.03: 输入 X22,抱闸开关JP3.04: 输入 X23,备用JP3.05: 输入 X24,备用JP3.06: 输入 X25,备用JP3.07: X0-X25 输入信号公共端JP3.08: X0-X25 输入信号电源端JP3.09: X0-X25 输入信号公共端,0V.JP3.10: X0-X25 输入信号电源端,+24V.★输入信号常开点/常闭点设置的意义是:如果此信号没有动作,输出信号是导通的,则称此信号为常闭信号。
三洋伺服R系列驱动器参数设定软件使用说明
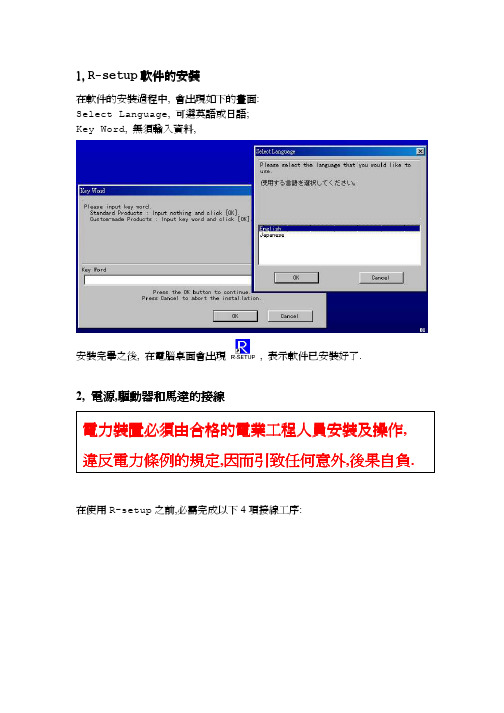
1, R-setup 軟件的安裝在軟件的安裝過程中, 會出現如下的畫面:Select Language , 可選英語或日語;Key Word , 無須輸入資料,安裝完畢之後, 在電腦桌面會出現, 表示軟件已安裝好了.2, 電源,驅動器和馬達的接線在使用R-setup 之前,必需完成以下4項接線工序:2.1, 馬達電源把馬達電源的四條電線接連到驅動器, 接線顏色是紅/白/黑分別接U/V/W,青黃線接外殼(下圖1), 電線接好後, 雖然未上電, 馬達轉子已被鎖定, 請勿以外力轉動馬達, 帶煞車的馬達要注意開放煞車.(在此順帶一提, 所謂煞車, 實際上是一個抱閘器, 它並無制動的功能, 在使用時是馬達先停定, 然後抱閘, 煞車的線圈通常是接DC24V, 不分極向, 線圈無電時抱閘; 通電時釋放.)2.2, 編碼器編碼器電線插頭必須自行銲接, 接觸電線及銲接時請消除人體靜電及烙鐵靜電, 否則靜電有可能擊毀編碼器內部的器件, 而不小心銲錯接線也會燒壞編碼器, 編碼器的屏蔽線要接在插頭的壓線眶即插頭外殼上, 編碼器插頭插在CN2(下圖2).2.3, 驅動器交流電源驅動器接交流電源, 有些大功率的驅動器必需接上三相電源(相電壓220V)才能運作, 三相電源接法如圖5加上S相; 單相電源(220V)接法如圖5, 相線與中線(L 與N)任意接R與T; 且必須接上地線(下圖5), 接地不良會做成極大干擾, 甚至失控. 電源總開關的安裝請參閱操作手冊.2.4, 電腦連線與電腦COM端口連線(如圖6), 此接線需另外購買, 如手提電腦無COM接口, 可使用USB-RS232轉換線, 也能連上.再次檢查所有接線無誤, 測量交流電源電壓是220V(三相相線也是220V), 就可以上電試機.驅動器首次上電, 通常會有報警信息顯示如AL xx,可不理會,3, R-setup 的使用的使用3.1, 連線及參數的備份連線及參數的備份R-SETUP 的主要功用是修改驅動器的三套參數, 即馬達參數, 系統參數及通用參數, 在使用桌面的 進入程式後, 首先可按照下面的畫面連上電腦及作驅動器參數的備份, 下圖右邊下半部分所勾選的小窗口, 表示三套參數都已選擇備份, 備份目的是為了保証萬一錯誤修改參數後可以重灌, 恢復原來的參數. 其文件類型副檔名為ap0.3.3.22, 馬達參數馬達參數的修改的修改的修改 修改馬達參數目的是讓驅動器知道所驅動的馬達型號, 從而與之匹配. . 請按照下面的畫面操作, 雖然馬達清單上有很多型號可供選擇, 用戶仍需按照其功率配套選用, 配套不當時, 驅動器將會報警, 嚴重失配會危害驅動器和馬達,另外, 馬達清單並非包羅萬有, 個別特別型號或需要另外從製造商傳來ap0文件調用(備份的文件就是ap0文件), 或傳來mp0文件, 而只要把mp0文件放在如下指定的文件夾內, 該馬達就會在馬達清單上出現.馬達參數修改之後, 請按下列離線及斷電關機步驟操作, 使其參數生效.3.3, 離線及斷離線及斷電關機電關機電關機每次斷電關機之前, , 都必須離線, 離線的方法如圖, 在關斷驅動器交流電源之後, 必須等候十秒鐘, 才可以重新上電.3.4, 系統參數系統參數的修改的修改的修改 系統參數包括電源, 再生電阻等參數,3.4.1, 交流電源的參數 交流電源的參數屬於系統參數的00頁, 請按下圖進行設定.3.4.2, 控制方式驅動器對馬達的控制方式屬於系統參數的08頁, 請按下圖進行設定3.4.3, 再生電阻的設定再生電阻的安裝與否, 請按下圖進行設定, 外置再生電阻的阻值, 功耗與安裝方法可參閱中文操作/使用說明書末章的資料10至資料17或英文Instruction Manual末章的Materials-Selection Details-External regenerative resistor / Dimension.然後請按本文3.3章所示, 進行離線及斷電關機步驟操作, 使其參數生效.通用參數的修改的修改3.5, 通用參數的修改請注意通用參數修改并确認之後, 無須斷電關機, 新參數會立即生效.3.5.1,修改畫面的顯示,以顯示更多的參數.驅動器的通用輸入端CONT1-CONT6通常與上位裝置連接, 接受上位的控制, 通用輸入端的功能可被設定或更改, 下面給出用例及接線圖.3.5.2,修改伺服ON的控制方式驅動器上電之後, 必須要進入伺服ON狀態, 才可以接受指令, 馬達才能運轉, 請按照下圖選擇01:一上電就伺服ON.下圖為CONT與CN1的接腳對照及上位信號的邏輯接法.3.5.3,修改限位開關的控制方式不使用限位開關的用戶, 必須把它設為無效, 否則驅動器面板會顯示一閃亮的斗字(正向到位)或卜字(反向到位)字形.在進行了以上的設定及接線無誤的情況之下, 一上電, 驅動器應可立即進入伺服ON狀態, 此時驅動器面板會顯示一旋轉的8字字形.3.6, 試車 Jogging operation.運用試車可以驗證系統是否正常, 如果在試車當中發生報警, 可參閱操作/使用說明書第8章--保養的說明. 查找報警密碼的內容, 要消除驅動器報警, 請按本文3.3章所示, 進行離線及斷電關機步驟操作, 使其恢復. 另外應檢查所有接線, 交流電源電壓, 編碼器選擇(系統參數), 煞車(如有), 接線過長等等, 如果都不能解決, 可能是系統損壞了.3.6.1, 試車方法如下圖:能夠順利完成上述的試車實驗, 又沒有發生停車報警(退出時AL dF報警是正常)的話, 就說明機件正常及接線無誤.3.7, 脈沖輸入方式設定脈沖輸入方式設定如果在本文第3.4.2章-控制方式中選擇了02:位置控制, 則可按照下圖設定脈沖的三種輸入方式以下是兩種上位裝置至驅動器的脈沖輸入線路圖, 上位為集電極開路式的接法較為簡單, 但接線過長則易受干擾.齒輪比設定3.8, 齒輪比設定如果在本文第3.4.2章-控制方式中選擇了02:位置控制, 則可按下圖設定齒輪比脈沖倍頻3.9, 脈沖倍頻在使用R系列標準ABS編碼器馬達的場合(131072脈沖/轉), 在齒輪比1/1時, 要達到最高轉速6000rpm, 脈沖的頻率將要超過13MHz, 那已超出R驅動器的回路最大頻率響應值(5MHz), 在此情況下, 可使用脈沖倍頻(上圖第8組第14頁PCPMUL), 例如設定該值為16, 要達到6000rpm, 脈沖頻率為819.2KHz.驅動器信號輸出3.3.101010, , 驅動器信號輸出驅動器有8個通用輸出端口(OUT1-OUT8), 用戶可選任一端口作任意信號輸出, 舉例如下圖:下圖為OUT與CN1的接腳對照及邏輯接法:請注意通用輸出端只作信號輸出, 其負載功率非常有限, 用戶如果把繼電器直接接上輸出端, 需清楚計算其功率, 及加上反壓吸收二極管, 否則有可能燒毀通用輸出端的元件.伺服系統除了定位控制之外, 還有扭矩(力)控制和速度控制, 可按照本文第3.4.2章--“控制方式”所述, 選擇00:扭矩控制, 或01:速度控制, 驅動器伺服ON之後, 可按照下圖進入補償調整程式,以消除驅動器的靜態漂移,之後馬達應靜止不動.在扭矩控制和速度控制時, 上位的模擬信號接法如下圖, REF端正電位高則正轉速/扭矩高, 負電位高則反轉速/扭矩高.3.11自動調諧自動調諧將上圖的00頁TUNMODE設為00, 02頁ATRES設為10, 其餘參數不管, 繼續加大02頁ATRES的數值, 直至感覺到軸心出現振動或運轉時出現噪音, 就表示到了調諧的極限,.附錄4, 附錄馬達的設定4.4.11, R2馬達的設定使用R2馬達(第3頁,圖05), 除了一般的設定之外, 還需要按下圖Group C的Page00設為Incremental, 甚至驅動器也可放入電池以保存編碼器的數據.但是在使用其他馬達時, 則無需作此設定, 否則驅動器會顯示多一橫如下圖。
三洋伺服驱动第八章-新
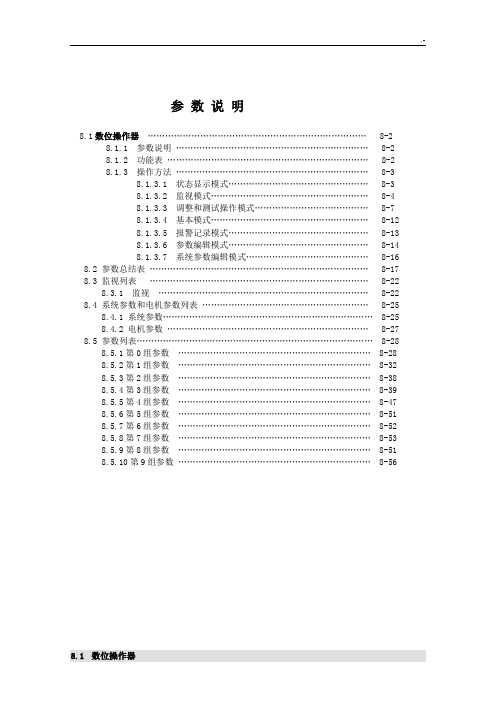
参数说明8.1数位操作器………………………………………………………………… 8-2 8.1.1 参数说明………………………………………………………… 8-2 8.1.2 功能表…………………………………………………………… 8-2 8.1.3 操作方法………………………………………………………… 8-3 8.1.3.1 状态显示模式………………………………………… 8-3 8.1.3.2 监视模式……………………………………………… 8-4 8.1.3.3 调整和测试操作模式………………………………… 8-7 8.1.3.4 基本模式……………………………………………… 8-12 8.1.3.5 报警记录模式………………………………………… 8-13 8.1.3.6 参数编辑模式………………………………………… 8-14 8.1.3.7 系统参数编辑模式…………………………………… 8-168.2 参数总结表………………………………………………………………… 8-178.3 监视列表………………………………………………………………… 8-228.3.1 监视……………………………………………………………… 8-228.4 系统参数和电机参数列表………………………………………………… 8-258.4.1 系统参数……………………………………………………………… 8-258.4.2 电机参数…………………………………………………………… 8-278.5 参数列表……………………………………………………………………… 8-288.5.1第0组参数………………………………………………………… 8-288.5.2第1组参数………………………………………………………… 8-328.5.3第2组参数………………………………………………………… 8-388.5.4第3组参数………………………………………………………… 8-398.5.5第4组参数………………………………………………………… 8-478.5.6第5组参数………………………………………………………… 8-518.5.7第6组参数………………………………………………………… 8-528.5.8第7组参数………………………………………………………… 8-538.5.9第8组参数………………………………………………………… 8-518.5.10第9组参数………………………………………………………… 8-56 8.1数位操作器该节要说明基本的数位操作器的操作。
山洋RS1伺服调试快速入门手册

点击“Close” 点击“Close”键
马达运行
点击“Exit” 点击“Exit”键,完成操作
自动调节响应设定
选择“ 0” 选择“Group 0”
点击“ 选择General 点击“Parameter ”选择General Parameter Setting 双击此行
更改响应值 设定值越大, 设定值越大,应答性就越高
00增量式编码器01绝对式编码器07半双工名称00电机编码器类型01主电源输入类型详细00推荐设置04推荐设置系统参数设置4系统参数页码00转矩控制模式0505控制模式设定选择控制模式0320bit21bit18bit19bit分辨率设置选择绝对式编码器的分辨率17bit名称详细绝对式编码器08位置环编码器设置选择位置环控制编码器方法00电机编码器cn2输入01速度控制模式02位置控制模式03速度转矩开关模式04位置转矩开关模式05位置速度开关模式外部编码器分辨率设置设置外部编码器的分辨率使用内置再生电阻02使用外置再生电阻再生电阻设置设定再生电阻的连接
编码线长度决定了编码器电源端口数量 --- 如下. . 10m / 32.8FT max. 编码器电缆长度 +5v DC 电缆 0v DC 电缆 连接 19pin 连接 20pin
25m / 82.0FT max. 连接 17 ,19pin 连接18 ,20pin
40m / 131.2FT max. 连接 12 ,17 ,19pin 连接 11 ,18 ,20pin
点击保存图标
点击“ Execute” 点击““ Execute”
点击”OK”完成操 点击”OK”完成操 ”OK” 作
速度点动 - 2
1. 选择此 项 点击“Exit” 2. 点击“Exit”更改运行速度
山洋驱动器说明
维护8.1故障检修(有报警时)-----------------------------------------8-2 8.2故障检修(无报警时)-----------------------------------------8-21 8.3用旋转开关进行速度环比例增益切换----------------------8-238.3.1概述------------------------------------------------------8-238.3.2设置过程------------------------------------------------8-23 8.4维护----------------------------------------------------------------8-24 8.5零部件检修-------------------------------------------------------8-258.1故障检修在以下的内容中, 将着力于解释每一个故障和报警的可能原因、检查方法以及检修措施。
为了避免事故发生, 在一个报警或者故障发生时, 一定要确保故障被去除并且确保系统安全后才可以重新操作。
在没有确保伺服驱动器、电机、机械装置和四周环境安全的情况下就去展开故障原因的调查是非常危险的。
详细了解故障发生时的情况将有助于缩小故障的可能范围、缩短故障检修过程。
在重现已确认的故障时务必确保这样做是安全的,并且要高度注意重现故障时的运行环境。
在更换伺服驱动器和伺服电机时,要确保没有其他的外部引起故障的因素以防止双重损坏。
在按照该手册推荐的方法进行故障检修以后若故障仍然存在,请咨询您的Sanyo Denki的经销商当报警状态显示为“8”、“F”或者“P”时,报警不能够复位。
在这种情况下应该先纠正该故障然后才能打开控制电源。
当一个报警出现时, 安放在伺服驱动器前面板上的七段LED状态显示屏就会开始闪烁, 并且报警从CN1输出。
三洋PY系列伺服控制器中文手册第九章3
0.2
重量(包括节线 INC)
WE
0.24
kg
0.24
重量(包括 ABS-RⅡ)
WE
0.31
kg
0.31
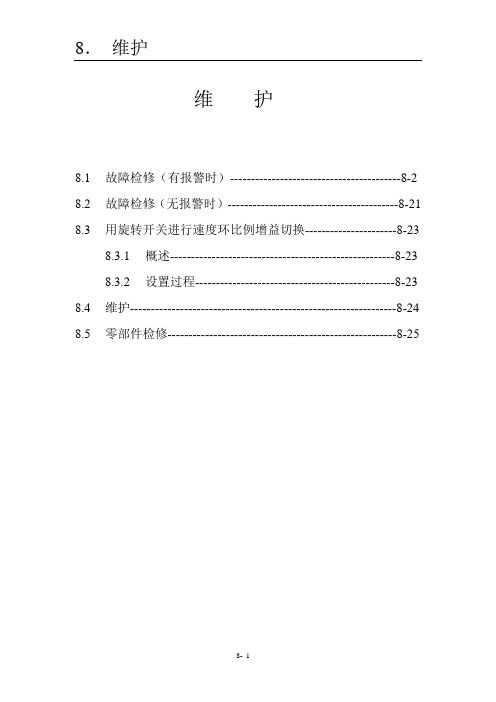
● 符号*表示该值是升温以后的值,其它的是在 68°F 时的值,每一个值都是典型的。
● 每一个值和特性都是用安装一个相当于厚度为 20、边长为 305mm 正方形的辐射状铝板而测得的。
W rpm rpm kg·cm kg·cm kg·cm Arms Arms Arms kg·cm/Arms V/krpm Ω msec msec g·cm·s2 g·cm·s2 g·cm·s2 kg kg
kg
1.15
重量(包括 ABS-RⅡ)
WE
1.35
kg
1.35
● 符号*表示该值是升温以后的值,其它的是在 68°F 时的值,每一个值都是典型的。
● 每一个值和特性都是用安装一个相当于厚度为 20、边长为 305mm 正方形的辐射状铝板而测得的。
W rpm rpm kg·cm kg·cm kg·cm Arms Arms Arms kg·cm/Arms V/krpm Ω msec msec g·cm·s2 g·cm·s2 g·cm·s2 kg kg
P50B04006P
名称
代码
数据
单位
数据
单位
* 额定输出
PR
50
W
50
额定转速
NR
3000
min-1
3000
最大转速
Nmax
4500
min-1
4500
* 额定转矩
TR
0.191
N·m
1.95
* 连续失速转矩
三洋PY系列伺服控制器中文手册第九章2
12.70
P50B03003D
170.00
PY2A015
P50D04006D
43.90
P50B04010D
27.00
P50B05005D
59.20
P50B05010D
23.00
P50B05020D
7.98
P50B07020D
13.00
P50B07030D
7.27
P10B10030H
4.29
P10B10075H
α 159.18 117.73 49.27 210.53 63.32 40.15 86.16 39.20 39.68 22.20 30.48 24.25
β 0.39×10-7 0.26×10-7 7.63×10-7 7.50×10-7 5.55×10-7 3.42×10-7 0.16×10-7 5.45×10-7 5.45×10-7 1.67×10-7 2.57×10-7 10.9×10-7
9. 技术说明
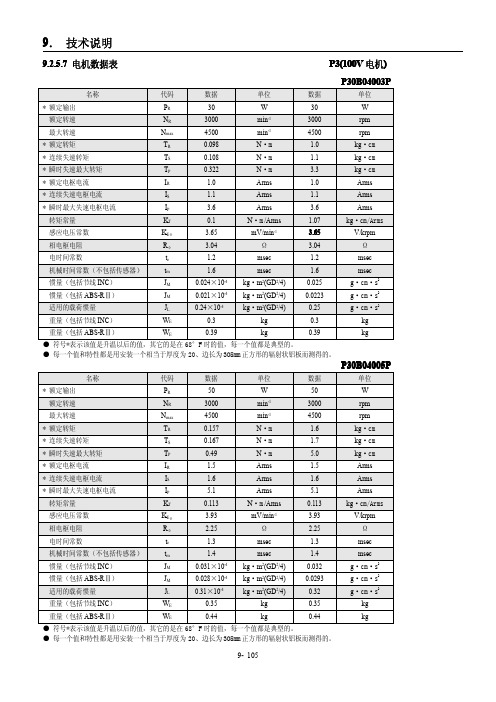
9.1.15 动态制动
(1)动态制动的减速转角
N:电机转速(min-1) I1: 驱动器内部处理时间 tD 引起的减速旋
转角度。 I2:动态制动操作引起的减速旋转角度。 TD:从信号发生到动作开始的滞后时间(sec)
(基于驱动器的容量。参看下表。)
【标准式】假设负载转矩(TL)为零
I=I1+I2= 2πN • tD 60
1.28
P50B08075D
4.61
P50B08100D
2.99
P60B13100H
1.57
P60B13150H
1.08
P80B18120H
1.63
β
60.5×10-7 37.3×10-7 12.2×10-7 17.2×10-7 9.20×10-7 8.00×10-7 5.01×10-7 22.8×10-7 9.29×10-7 3.86×10-7 6.14×10-7 4.41×10-7 3.08×10-7 0.75×10-7 1.65×10-7 2.41×10-7 1.06×10-7 3.59×10-7 6.80×10-7 3.68×10-7 2.08×10-7 2.95×10-7 1.44×10-7 0.88×10-7 0.62×10-7 4.74×10-7 3.39×10-7 0.46×10-7 0.27×10-7 0.61×10-7 0.48×10-7 1.81×10-7 1.05×10-7 1.59×10-7 0.93×10-7 0.49×10-7 0.30×10-7 1.19×10-7 0.60×10-7 2.06×10-7
三洋PY系列伺服控制器中文手册第九章4

3. 注意: 1) 该功能只输出警告,并不执行处理步骤,如报警出现时的伺服 OFF 或者动态制动。在过载警告出 现时,通过检查系统的运转等来防止过载报警出现。 2) 当估计的电机温度比设置的警告值低时,警告输出就会自动恢复(对于过载报警,不执行报警复 位操作,过载报警就不会复位)。甚至在伺服 OFF 状态时如果估计电机温度比设置值还高,警告 也会输出。 3) 当该功能有效时,估计电机温度变为“冷启动”(当控制电源打开时估计电机温度是过载报警级别 的 0%)。不要因为过载报警而在电源打开及关掉后的瞬间就重启系统,因为电机还没有充分冷却。 否则会导致电机烧毁或者损坏或者导致一场事故。在重启系统之前要留有充分的时间。 4) 当过载警告和超程警告同时出现时,在 7 段 LED 优先显示超程警告。
148
9. 技术说明
表 9-26-2 过载警告无效时(如 OLWL=100%)的输出
( 报警输出=BIT *1)
估计的电机
报警输出的 CN1 管脚号
温升
7 段 LED 显示
46
45
44
43
缩写
报警/警告
名称
(ALM8) (ALM4) (ALM2) (ALM1)
小于过载报
警的 80%
- 过载报警的
无报警
0
0
1
0
OLW
过载警告
100%
*3
过载报警的 100%或以
上
1
1
1
1
OL
过载报警
注意 1. 在模式 2 的第 3 页的 Func2 Bit6 设置报警输出方式。 当 Func2 Bit6=”0”时,输出报警代码(CODE);当 Func2 Bit6=”1”,输出报警位(BIT)。
山洋伺服R系列伺服驱动器报警处理
报警号:E6—参数异常
一. 可能的原因 驱动器中写入了异常参数 二. 现象
(PY驱动器:P号报警)
驱动器中写入错误的参数后重新上电,显示 E6报警。
特别是PY驱动器,用手操器选择马达型号后,由于马达型号与驱动器不匹配, 产生报警 三. 解决方法 写入正确的参数。 正确的参数请向代理店咨询。
PY驱动器在E6报警后,用手操器不能恢复,必须用PYIF软件写入正确的参数。
四. 说明
马达型号与驱动器的型号有特定的组合,错误地组合后会报警E6
例如:马达·P60B13150B与 30A驱动器和50A驱动器都可以组合,但参数不同。 混淆了以后会产生E6报警。
四.
说明
R马达的编码器是省配线绝对值编码器。 编码器与驱动器之间的反馈形式是 采用通信 方式,反馈位置数据。 若编码器的反馈信号受到干扰,容易造成 数据丢失,编码器报错
报警号:d2—位置脉冲频率异常
一. 可能的原因 位置指令脉冲数字滤波器的设置值不合理 二. 现象
采用R系列电机,采用默认设置的情况下,马达转速高于1200rpm左右时,可能产生
报警号:94—编码器CRC异常
一. 可能的原因 编码器的多转数据被清零,造成编码器上电自检错误 二. 现象 使用R2AA*******H00电机(增量式系统用绝对值编码器)时,若对编码器进行 了清零处理,可能产生此报警。 解决方法 将驱动器参数Gr C.08的值设定为01,则不会产生此报警 (默认设定值为00) 四. 说明 对于R2AA*******H00电机,并不存在多圈数据,清零时可能造成94报警 对于R2AA*******P00电机,存在着多圈数据,可根据需要选择是否清零
三.
报警号:E2—EPPROM内部参数异常
东莞三洋电梯调试参数表

0~65535
F173~F174备用
F175
启动时蠕动速度(参见F186)
6
0~65535
mm/s
0.006m/s
F176~F179备用
F180
速度增益
1000
0~65535
‰
1000.0‰
F181
并联中的电梯编号(只有在参数F23=3时先级越高。并且自动升级为并联主梯
3
0~65535
0.1s
0.3s
F123
召唤分类
0
0~65535
0:只有前门召唤
1:有前门召唤和后门召唤
2:有前门召唤和残疾人召唤
3:有前门召唤、后门召唤及残疾人用召唤
F124~F127备用
F128
区分前后门控制模式
0
0~65535
0:前后门分开控制
1:前后门一起控制
F129
开通提前开门和开门再平层功能
F193
底楼空载补偿
0
0~65535
‰
0.0‰3.0
F194
底楼满载补偿
0
0~65535
‰
0.0‰7.8
F195
顶楼空载补偿
0
0~65535
‰
0.0‰2.2
F196
并联时第二基站
0
0~64
F197
并联时第三基站
0
0~64
F198-F199备用
F200
DSP版本号(取消限流保护)
43033------------百位加1
F201
F202
静态自整定
设1整定,整定完毕后自动变为3,整定完毕须修改成0
F203