PLC控制下的电梯系统外文文献翻译、中英文翻译、外文翻译
PLC建筑电梯控制系统中英文对照外文翻译文献

(文档含英文原文和中文翻译)中英文对照外文翻译文献Application of PLC in the Elevator Control System ofIntelligence BuildingAbstract: The paper mainly discusses one subsystem of intelligence building system: the elevator control system. The PLC strong ability in interference and so on makes the elevator industry one after another to apply the PLC to the elevator control system in order to replace the relay being used in traditional elevator control system. The Application of PLC in the Elevator control system reduces the breakdown rate and efficiently improves the operating reliability of the elevator with safety .The structureof system is also simple and tightly packed.The working principle of the elevator control system is: The spot control information is send into the PLCfrom the customer input devices firstly, then the PLC control cabinet is required to send out the control signal to drive the equipments according to the system demands. The elevator can then proceed the homologous action according to the control request .The paper selectsOMRONcompany’s C200HE series PLC, introducing parts of signal hookup of the elevator control system and explaining the function of the control cabinet. Lastly the automation programming is introduced. Simulated experiments enunciates that the design method is viable. It can make the personnel of the industry management center to long-distance monitor and control the elevator in control center, to connect the elevator control system with intelligence building industry management system by Ethernet or special-purpose network such as Lon Works.The elevator working state can also be timely watched.These not only can realize scientific centralized management of the elevator, but also can lower the elevator maintenance cost etc. It is one of the developing direction of intelligence building elevator control system.Keywords: PLC; intelligence building; elevator control system; working principle; program designⅠ. IntroductionIn 1980s The first intelligence mansion had been completed in America, then intelligence building has been abroadly taken attentions by the whole world.The concept of intelligence building has been put different meanings along with the development of society. The early stage intelligence building had been thought that it is equal to the intelligent mansion, but now the intelligence building not only includes the intelligence mansions but also involves intelligence residential districts. This paper mainly discusses one subsystem of intelligence building system: the elevator control system.In intelligence residential districts the enterprise’s information managing system mainly takes charge of the things which related to the daily life, for examplesupervising the district equipments, managing vehicles, disposing critical situations and so on.The elevator supervising and control system is also necessary to the intelligence residential districts.How to make people feel safe ,stable and comfortable and how to save energy resources and protect environments and so on are the basic requirements to the elevator control system.PLC is a common industry control device.It is a special industry control computer which has the perfect function and simple frame. The PLC strong ability in interference and so on makes the elevator industry one after another to apply the PLC to the elevator control system, in order to replace the relay being used in traditional elevator control system. The Application of PLC in the elevator control system reduces the breakdown rate and efficiently improves the operating reliability of the elevator with safety. This paper mainly discusses the elevator control system’s working principles, the system’s software and hardware realization methods and so on.Ⅱ. The Working Principle of Elevator Control System In Fig. 1 the Hardware Structure Graph of Elevator Control System is presented.Fig. 1 The Hardware Structure Graph of Elevator Control SystemThe Working Principles of Elevator Control System are stated as follows: The spot control information is send into the PLC from the customer input devices firstly, then the PLC control cabinet is required to send out the control signal to drive the equipments according to the system demands. The elevator can then perform thehomologous action according to the control request. There are velocity feedback devices in system, which adopt measure velocity generators to provide the elevator velocities and generally are installed in the tail of tow motors .So this is a feedback control system, which can improve the system’s control precision.Ⅲ. The Hardware Configuration of Control System It is not necessary to do interface circuit in the elevator’s PLC control system.What we should do is to send the signals to PLC digital input terminals.The signals include inside and outside calling signals ,floor location inspecting signals , limiting location signals ,opening and shutdown the elevator door signals etc. The DC power which is provided to PLC can be used as indicator light power. The PLC output points can be directly used to control transduce rs for the purpose of electrical motor’s positive turn and reverse ,stop and control each segment velocity and so on .OMRONcompany’s C200HE series PLC has been selected as major control configuration according to the input/output points and the length of user’s program. On the other hand we also consider that the system’s function can be expanded in the future .C200HE series PLC ,whose perfect function and strong reliability, can meet these demands at present.Moreover, input and output devices are needed in elevator control system, besides the PLC, system’s major control device.Part of signal hookups of the elevator electric control system is shown in Fig.2.The control cabinet is the control center, from which we can send out various control commands. The control cabinet often was installed in the elevator room .The electric devices and signal systems, for example the contactors, relays, capacitances, resistors, rectifiers and transformers etc., are centralized in the control cabinet. The Power of the control cabinet was imported from the chief power of the elevator room. This power was also introduced into control panel by soft cables and was linked with each control buttons. The power lines which was derived from control cabinet was delivered to tow electric motors. Others control lines and signal lines were separately sent to each floor junctionⅣ. Program designThe design includes two parts: hardware and software.The hardware design is the base of software. Considering that the control demands are relatively complex, we design the programs separately according to the control function. Furthermore, we follow the principle as follows: When the elevator is ascending, the ascending demands are prior to other demands; When the elevator is descending, the descending demands are prior to other demands. The Sequential Function Chart (SFC) is adopted during the boxes to form elevator’s executive circuitry design. It is a method specially used in industrial sequential control. The SFC method can describe the system’s working procedure in great detail. For example there is a three layers intelligence building. A subprogram, the calling from the third floor as elevator in the first floor, is shown in Fig. 3 with SFC.When all SFC are drawn and I/O address lists are presented, we can convert the SFC to Ladder Diagram (LD).Considering the strict demands for time and for locked each other ,we introduce working bits to remember working steps. We should write out the working bits control program, which can link together each step and make the previous step as the next step restriction condition. Thus the actual outputs are the logic combination of these working steps.Ⅴ. ConclusionThe system program has been debugged completely at present. Simulated experiment enunciates that the design method is viable. Application of PLC in the elevator control system is an effective method. It can make the personnel of the industry management center to long-distance monitor and control the elevator in control center, to connect the elevator control system with intelligence building industry management system by Ethernet or special-purpose network such as Lon Works. The elevator working state can also be timely watched. These not only can realize scientific centralized management of the elevator, but also can lower the elevator maintenance costs etc. It is one of the developing direction of intelligence building elevator control system.References[1]Liang jianqi , Duan zhengang,and He wei .CommunicationImplementation of PLC-Based Elevator Remote Monitoring System (in Chinese)[J] Journal of Beijing Technology and Business University 2003,21(2):18-21[2]Ma Hongqian ,Zhang Xin .Application of PLC in Higher Building Elevator Control System (in Chinese)[J]Journal of Liaoning Higher V ocational Technical Institute 2002,4(5): 86-88.[3]Cui Guangyuan. The Application of PLC to Elevator Control. (in Chinese)[J]Journal of Dongbei Electrical Power Technology 2003,(7): 50-52.Author BiographiesThe first author is currently working as a teacher in Taiyuan University of Technology. Her current research interests include signal processing, intelligence control etc.The second author is currently working as a teacher in Taiyuan University of science and Technology. Her current research interests include telecommunication, intelligence control etc.附录B 外文翻译PLC在智能建筑电梯控制系统中的应用摘要:本文主要讨论了智能建筑系统的一个子系统:电梯控制系统。
基于PLC的电梯控制系统设计中英文翻译
Elevator System Based on PLCComposed by the order of relay control system is a realization of the first elevator control method. However, to enter the nineties, with the development of science and technology and the widespread application of computer technology, the safety of elevators, reliability of the increasingly high demand on the relay control weaknesses are becoming evident.Elevator control system relays the failure rate high, greatly reduces the reliability and safety of elevators, and escalators stopped often to take with the staff about the inconvenience and fear. And the event rather than taking the lift or squat at the end of the lift will not only cause damage to mechanical components, but also personal accident may occur.Programmable Logic Controller (PLC) is the first order logic control in accordance with the needs of developed specifically for industrial environment applications to operate the electronic digital computing device. Given its advantages, at present, the relay control the lift has been gradually replaced by PLC control. At the same time, AC variable frequency motor speed control technology, the way the lift drag speed has been a gradual transition form DC to AC frequency converter. Thus, PLC control technology increases VVVF Elevator modern technology has become a hot industry.1. PLC elevator control advantages:(1) Used in elevator control PLC, with so ware for automatic control of lift operation, reliability greatly increased.(2) Layer was removed and majority of the relay, the control system structure is simple, simplify the external circuit.(3) PLC can be a variety of complex control system, easy to add or change control functions.(4) PLC can be automated fault detection and alarm display to improve the operation of security and ease of maintenance.(5) For the group control the allocation and management, and improve the efficiency of elevator operation.(6)Do not need to change the control scheme changes when the hardware connection.2. VVVF elevator control characteristics.With the power electronics, microelectronics and computer technology to control the rapid development of technology, communication technology VVVF also a very rapid rate. AC variable frequency motor speed control technology is the power to improve the process in order to improve product quality and improving the environment and promoting technological progress as a primary means. Frequency of its excellent performance and the speed brake from a smooth performance, high efficiency, high power factor and power-saving of a broad scope of application and many other advantages of being at home and abroad recognized as the most promising approach speed.Exchange characteristics of VVVF Elevator:(1) low energy consumption.(2) low load circuit, the re emergency power supply device of small.In the acceleration stage, the required start-up current of less than 2.5 times the rated current. Peak starting current and time is short. Since the starting current is drastically reduced, so power consumption and power supply cable diameter can be reduced a lot. Required for emergency power supply devices are also relatively small size.(3) high reliability and long service life.(4) good comfort.Elevator operation is best to follow the speed curve of a given operation. Their characteristics can be adapted to human feelings, and to ensure that noise operation, smooth brake Ping layer and high precision.(5) stable noise-free.(6) In the car, the engine room and adjacent areas to ensure that noise. Because their systems use a high clock frequency. Always produce a true sine wave power supply current yet. Motor torque ripple does not appear. Therefore, to eliminate vibration and noise.3. Elevator control technology.The so-called elevator control technology refers to the elevator drive system and electrical control system of automatic control. 70 as the 20th century in China’s elevator were marked by the exchange of two-speed elevator. Its speed is used to change the elevator traction motor of the very few, two or mute-level approach to the number of windings, very few of them as high-speed winding of the winding, a very few number of windings as the low-speed winding. Windings for high-speed elevator-speed start-up and running, low-speed windings for braking and the maintenance of elevators.The early 80s, VVVF inverter controlled variable lift system available. It uses AC motor drivers, are able to reach the level of DC motor, control the speed of the current has reached 6 m/sec. Its small size, light weight, high efficiency, energy saving, inc1uding the past almost all the advantages of the lift. Is the latest elevator drive systemOperation in vertical lift, there is also the starting point of the terminus station. For more than three-story elevator buildings, the starting point of the terminal stations and stops between the had not, the starting point for these stations at the first floor of the terminal located at the highest floor. Starting point in the first floor of the station known as base stations, known as the starting point at both ends of the terminal stations and stations at both ends of intermediate stops between stations.Outside the station has a call box, box set are used by staff for elevator call button or touch the call button, the general ends of the lift stations in the call box on the Settings button or touch of a button. 1iddle layer of the station set up the call box button or touch button 2. No drivers for the control of elevators, at various stations are set up calls me on a button or touch button. Elevator car and the internal settings (except for debris elevator) to manipulate me. Control box switch on the handle or set up stations and the corresponding layer of buttons or touch-button control box on the touch-control button or command button or touch the city button. Outside the command button or touch-button issue as the signal outside the command signal, within the commandbutton or touch-button issue within the signal as a command signal. 80 In the mid-20th century, the touch button has been replaced by micro-button.As the elevator call box outside the base station, in addition to set up a call button or touch button, but a1so set a key switch in order to work the elevator clearance. Drivers or management staff to open the elevator to the base station can wriggle through a dedicated key to the key switch. Close the elevator in place to autocratically cut off the elevator control power supply or power supply.4. PLC Control Elevator Design.With the continuous development of urban construction, the increasing high-rise buildings, elevators and life in the national economy has a broad application. Elevator high-rise buildings as a means of transport in the vertical run of daily life have been inextricably linked with people. In fact the lift is based on external call control signals, as well as the laws of their own, such as running, and the cal1 is random, the lift is actually a man-machine interactive control system, simple to use control or logic control order can not meet the control requirement, and therefore, elevator control system uses a random control logic. Elevator control is current1y generally used in two ways, first, the use of computer as a signal control unit, the completion of the lift signal acquisition, operation and function of the se, to achieve the lift and set the autocratic scheduling function to run the election, drag the control from inverter to complete; the second control mode with programmable logic controller (PLC) to replace the computer control signal sets the election. From the control and performance, these two types of methods and there is no significant difference. Most of the domestic manufacturers to choose the second approach, because the smaller scale of production there design and manufacture of high cost of computer control devices; and PLC high reliabi1ity, convenient and flexible program design, anti-interference ability, stable and reliable operation of the characteristics of Therefore, the elevator control system is now widely used to realize programmable control.5. Lift control system.Lift control system is used to manipulate each control process by managing such commands as running direction, car call, landing call, load signal, landing indication, safety protection.Lifts in different applications have different load, speed and drive / control modes. Lifts in same application may also have different control mode. Whatever control mode is adopted, the objective is the same, to be specific, according to car call and landing call, lift control system will execute automatic logic judgment to determine which lift will receive signal, which direction lift will run towards and complete programmed control objective through electrical automatic system based on command.Types of lift control system.Control system development chronicle indicates that there has appeared many control modes, such as such as relay control, PLC, single computer control, multiple-computer control. Prevailing in different era, these control modes are still employed in lifts now due to massive integrated circuit and computer technology development.PLC control system.As abbreviation of programmable logic controller, PLC is an electronic system featuring digital computation. It adopts programmable EPROM to execute logic computation, order control, timing, number counting, arithmetic computation, besides, it can input and output through digital or analogy modes.The mechanism of PLC control is as follows: input of PLC includes such command signals, as power key to home landing, car call, landing call, various safety switches, position signal, while output of PLC includes contactor, relay, indicators of car / landings and communication unitary, indicators inside car and switch, position signal, are input to PC, while other executing com.Programming principle is determined by lift control mode. Programming can either be made according to relay logic control circuit or individually in different phases according to lift control functions after completely separating from relay control circuit. Based on the ready made control circuit, the formeris simple and easy to master, while the latter involves less programs by integrating programs of small function.Used in lift control system, PLC has such advantages, as high reliability, stability, easy programming, user-friendliness, convenient maintenance & inspection.Nowadays, there is a wide range and series of programmable logic controllers. Input / output points range from 30 to 8000 or above, so as to meet lift control requirements with different landing number.PLC 控制下的电梯系统由继电器组成的顺序控制系统是最早的一种实现电梯控制的方法。
基于plc电梯控制外文文献翻译、中英文翻译、外文翻译
In the article has analyzed the elevator loadcharacteristics, elaborated uses the trapezoid acceleration curve theelevator ideal velocity curve, unifies the frequency changer and thePLC performance, elaborated the elevator control system constitutionand the operational factor. Elaborated the elevator speed curveproduces the method, has induced the characteristic which designs byPLC constitution control system software.Key word: Load characteristics ideal velocity curve control systemsoftware design1. OutlineAlong with the urban construction unceasing development, thehigh-rise construction unceasingly increases, the elevator has thewidespread application in the national economy and the life. Theelevator took in the high-rise construction the vertical movementtransportation vehicle already and people's daily life is inseparable.In fact the elevator is according to exterior movement and so oncalling signal as well as own control rule, but calls is stochastic,the elevator is a person machine interactive control system in fact,purely is cannot satisfy the control request with the sequentialcontrol or the logical control, Therefore, the elevator control system uses the stochastic logical waycontrol. At present the elevator control generally has selected twomethods, one is uses the microcomputer to take the signal controlunit, completes the elevator signal gathering, the running status andthe function hypothesis, realizes the elevator automatic dispatch andthe collection chooses the movement function, drives the control tocomplete by the frequency changer; The second control mode (PLC)substitutes for the microcomputer realization signal collection withthe programmable controller to choose the control. Said from the control mode and the performance, these two methodscertainly not too big difference. The domestic factory mostly choosesthe second way, its reason lies in the production scale slightly, owndesign and the manufacture microcomputer control device cost ishigher; But PLC reliability high, programming convenience nimble, theantijamming ability strong, the movement stable is reliable and so onthe characteristic, therefore the present elevator control systemwidely uses the programmable controller to realize.2. Elevator ideal performance diagramIndicated according to the massive research and the experiment, theperson may accept the maximum acceleration is am <= 1.5m/s2,acceleration rate of change rho m <= the 3m/s3, elevator idealperformance diagram may divide according to the acceleration is thetriangle, the trapezoid and the sine profile, As a result of sine profile acceleration curve realization moredifficult, but the triangle curve maximum acceleration and is startingand applies the brake the section turning point acceleration rate ofchange to be bigger than the trapezoidal curve, namely + rho m jumpsto - rho m or jumps from - rho m to + rho the m acceleration rate ofchange, therefore very little uses, because the trapezoidal curve iseasy to realize and has the good acceleration rate of change frequenttarget, therefore is widely used, uses the trapezoidal accelerationcurve elevator ideal performance diagram like chart 1 to show: The intelligent frequency changer is for the elevator special-purposefrequency changer request and so on elevator nimble velocitymodulation, control and high accuracy even level which but speciallydesigns, may use for parts the general three-phase asynchronous motor,and has function and so on intellectualized software, standardconnection, menu prompt, input elevator curve and other essentialparameter. It has the debugging convenience quickly, moreover can automaticallyrealize the single multilayered function, and has the automaticoptimization deceleration curve the function, is composed the velocitymodulation system crawling time by it few, the even level distance isshort, no matter is the double winding electric motor, or electric motor suitable, its highest design speed may reach 4m/s, itsunique computer monitoring software, may choose the serial interfacerealization input/output signal the non- electronic contact control. The frequency changer constitutes elevator system, when the frequencychanger receives the controller to send out shouts the ladderdirection signal, the frequency changer basis hypothesis speed and theacceleration value, the starting motor, after achieved the maximumspeed, the uniform speed moves, when arrives the goal leveldecelerates, the controller sends out shuts off the high velocitysignal, reduces the speed which the frequency changer establishes themaximum speed to reduce to the crawling speed, In decelerates in the movement process, the frequency changer can theautomatic computation decelerate to the even level spot betweendistance, and calculates the optimized curve, thus canaccording tothe optimized curve movement, cause the low speed crawling time toreduce to 0.3s, the frequency changer through adjusts leveling thespeed in the elevator even level process or applies the brake thepitch to adjust leveling the precision. Namely when the elevator stops too early, the frequency changerincreases the low speed value or the reduction applies the brake thepitch value, otherwise reduces the low speed value or increasesapplies the brake the pitch value, when the elevator to leaves evenlevel position 4 - 10cm, has the even level switch automaticseparation low speed signal, the system according to the optimizedcurve realization high accuracy even level, thus achieved the evenlevel accurate is reliable.3. Elevator speed curveElevator movement comfortableness is decided in its movementprocess acceleration a and the acceleration rate of change p size, theoversized acceleration or the acceleration rate of change can createpassenger's ill feeling. At the same time, for guaranteed the elevatorthe operating efficiency, a, the p value not suitable excessively issmall. Can guarantee a, the p best value elevator performance diagramis called the elevator the ideal performance diagram. The elevatormovement ideal curve should be the parabola - straight linecomprehensive velocity curve, namely elevator Canada, reduces theprocess constitutes by the parabola and the straight line. Theelevator assigns the curve is whether ideal, direct influence actualperformance diagram.3.1 velocity curves have the methodUses FX2-64MR PLC, and a consideration input output requestincreased FX-8EYT, FX-16EYR, the FX-8EYR three expansions modules andthe FX2-40AW twisted pair line correspondence adapter, FX2-40AW usesin the system serial communication. Using PLC the expansion functionmodule D/A module realization speed ideal curve output, whenbeforehand the digitized ideal velocity curve stores the PLC register,the procedure movement, through looks up the table way to read in D/A,transforms the simulation quantity after D/A the speed ideal curveoutput.3.2 Acceleration assign the curve the production8 D/A outputs 0 ~ 5V/0 ~ 10V, the corresponding numerical valueis 16 enters system several 00 ~ FF, altogether 255 levels. Ifelevator rise time between 2.5 ~ 3seconds. According to theconservative value computation, in the elevator acceleration processeach time Zha Biao time-gap not suitably surpasses 10ms.As a result of elevator logic control section procedure biggest, butthe PLC movement uses the cyclical scanning mechanism, thus usuallyuses looks up the table method, Zha Biao instruction time-gapexcessively is each time long, cannot satisfiedly assign the curve theprecision request. In the PLC movement process, its CPU with variousequipment between exchange of information, user program execution,signal gathering, control quantity operation and so on output all isdefers to the fixed order to circulate the scanning way to carry on,each circulation all must carry on the inquiry, the judgement and theoperation to all functions. This kind of order and the form capableperson are not the change. The usual scanning cycle, is basic mustcomplete six steps the work, including movement surveillance, andprogramming exchange information, and digital processor exchangeinformation, and communication processor exchange information,execution user program and input output connection service and so on.In a cycle, CPU only carries out to the entire user program. This kindof mechanism has its convenient one side, but timeliness is bad. Theexcessively long scanning time, directly affects the system to thesignal response effect, in under the guarantee control functionpremise, maximum limit reduces CPU the cyclical scanning time is avery complex question. Generally only can short adopt the method fromthe user program execution time. The elevator logic control sectionprocedure scanning time has surpassed 10ms, although has adopted somereduced procedure scanning time means, but still will be unable toscan the time to fall to 10ms below. At the same time, applies thebrake the section curve to use according to is away from theprinciple, each section of distances arrive the response time notsuitably surpasses 10ms. In order to satisfy the system the timelyrequest, in the velocity curve production way, uses the severancemethod, thus effectively has overcome the PLC scanning mechanismlimit.The starting acceleration movement by decides the cycle interruptservice isr to complete. This kind of severance cannot carry on theswitch by the procedure, once establishes, continuously presses thehypothesis time-gap circulation severance,therefore, the startingmovement condition must put in the interrupt service isr, when doesnot satisfy the movement condition, the severance namely returns.3.2 Decelerates applies the brake the curve productionIn order to guarantee applies the brake process completing,must carry on in the master routine applies the brake the condition tojudge and to decelerate a determination. In decelerates before adetermination, the elevator continuously is in the acceleration or thesteady fast movement process. The acceleration process completes bythe fixed cyclical severance, accelerates after the correspondingpattern maximum value, the acceleration procedure movement conditionno longer satisfies, after each time severs, no longer carries out theacceleration procedure, directly returns from the severance. Theelevator corresponds the pattern the maximum value movement,decelerates in this pattern to after, has the high-speed countingseverance, the execution decelerates the service routine. Revises thecounter in this interrupt service isr to suppose the definite valuethe condition, guaranteed the next time will sever the execution. In the PLC internal register, deceleration curve table value from big to small , each time severs all carries out time "theindicator needle to add 1" the operation, then the next severance willlook up the table number is smaller than this severance to look up the table numbers. Thegate area peaceful level area judgement produces by exterior signal,guarantees the moderating process the reliability.4. Elevator control system4.1 Elevators control system characteristicIs relates the elevator movement comfortable feeling target in theelevator performance diagram start section the key link, but thecomfortable feeling with the acceleration direct correlation,according to controls the theory, must cause some quantity accordingto prearrange the rule change to have to carry on the positivegoverning to it, said regarding the elevator control system, mustcause the acceleration to have to use the acceleration feedbackaccording to the ideal curve change, according to electric motormoment of force equation: M - MZ= Delta M=J (dn/dt), obviously theacceleration rate of change had reflected the system dynamic extensionis apart from the change, the control acceleration is apart from DeltaM=M - MZ on the control system dynamic extension. Therefore uses theacceleration in thissection the timing control principle, when thestart ascent portion speed achieved when stable state value 90%,systematically will cut the speed control from the accelerationcontrol, because in the steady fast section, the speed will besmaller for the permanent value control undulation, the accelerationchange will not be big, also will use the speed closed-loop controlto be allowed to cause the stable state speed hold certain precision,will be applies the brake the section precise even level to create thecondition. Uses the PI regulator control in the system speed ascentportion and steady fast Duan Suidu, but two section of PI parameter isdifferent, enhances the system the dynamic response target.Applies the brake the section in the system, namely must to reduce thespeed to carry on the essential control, guarantees the comfortablefeeling, also must strictly controls according to the elevatormovement speed and the distance relations, guarantees the even levelthe precision. In system’s rotational speed reduces to 120r/min in front of, in orderto enable two to obtain the proper attention to both, adopts by theacceleration to the timing control primarily, simultaneously actsaccording to on each as soon as the stopping distance the actualrotational speed and the theory rotational speed deviation revises theacceleration to assign the curve the method. For example in is awayfrom the even level spot some as soon as to be away from L place, thespeed should reduce to Vm/s, but the actual rotational speed is highis V ' m/s, then explained adds the system turns is apart frominsufficiently, after therefore calculates the here to assign reducesspeed value -ag, causes it to add on a negative deviation againepsilon, even if the here reduces the speed given value to revise for- (ag+ epsilon) causes to assign reduces the speed and the true speednegative deviation enlarges, thus enlarged the system to turn thedistance, caused the speed very quickly to fall to the standard value,when electric motor’s rotational speed reduces to 120r/min after, this time thetheater box above the level only had several centimeters, The elevatorrunning rate is very low, for did not prevent phenomenon appearancewhich stops to the even level area, enables the elevator comparativelyquickly to enter the even level area, uses the proportional control inthis section, and uses the time optimization control, guaranteed theelevator accurately promptly enters the even level area, achieves theaccurate reliable even level.4.2 elevators controls constitutionBecause the elevator movement is according to the floor and the theater box calling signal, the travelling schedule signalcarries on the control, but the floor and the theater box call isstochastic, therefore, the systems control uses the stochastic logicalcontrol. Namely in realizes in the elevator basic control requestfoundation by the smooth logic control, according to stochastic inputsignal, as well as elevator corresponding condition at the rightmoment control elevator movement. Moreover, the theater boxposition is determined by the pulse encoder pulse number that, anddelivers PLC the counter to carry on the control. At the same time,each building establishes to approach the switch to use in to examinethe system the floor signal. In order to be advantageous for the observation, is at the floor tothe elevator movement direction as well as the elevator to carry onthe demonstration, uses LED and the photo tube demonstrated, but tothe floor and the theater box calling signal to the indicating lampdemonstrated (on switch has indicating lamp).In order to enhance the elevator the operating efficiency peacefullevel precision, the system requests PLC to be able to theater boxCanada, to decelerate as well as to apply the brake to carry on theeffective control. Realizes according to the theater box physicallocation as well as the exchange velocity modulation system controlalgorithm. For the elevator movement security, the system shouldestablish the reliable fail safe and the corresponding es the PLC realization the elevator control system to constitute byfollowing several main parts.4.2.1 PLC control circuit; PLC receives shouts the ladder from thepanel board and each level to summon the signal, the theater boxand the gate system function signal as well as the well and thefrequency changer condition signal, realizes the elevator collectionafter the procedure judgement and the operation to choose the control.PLC during the output demonstration and supervisory signal, sends outthe movement direction, the start, Canada to the frequencychanger/decelerates moves and applies the brake to stop the ladderequisignal.4.2.2 electric currents, speed double closed loops electric circuit;Frequency changer itself is equipped with the electric currentdetector set, from this constitution electric current closed loop;Through revolves the encoder with the electricalmachinery coaxialjoint, produces a, the b two pulses enters the frequency changer,during confirmation direction, counts the constitution speed closedloop using the pulse.4.2.3 displacements control circuit; The elevator took one kindcarries the person tool, reigns under the potential state of loading,besides request safe reliable, but also requests the movement to besteady, rides comfortably, anchors accurately. Uses the frequencyconversion to modulate velocity Shuanghuan to control may basicallyanswer the purpose, the use existing revolves the encoder toconstitute the speed ring at the same time, moves the proportionthrough the frequency changer PG card output and the electricalmachinery speed and the elevator the pulse number, introduces it PLChigh-speed counting to input the port, through the accumulation pulsenumber, (1) calculates the pulse equivalent after the type, from thisdefinite elevator position. Elevator displacement H=SI In the formula I - accumulation pulse number; S - pulse equivalent; S = plD/(pr) (1) L – Proportion of decelerates ; D - tows the wheel diameter; P - revolves the encoder every time to transfer corresponding thepulse number; R - PG card frequency division ratio.4.2.4 ends stations protection; When in elevator direction detectionline, on the good directional relay, the express train assistancecontact device, the express train movement contact device, the doorlock relay, on the good contact device electricity attracts gathers, mechanical floodgate opens, on elevator line. When the theater box bumps intoforces speed changeing the switch, the PLC internal lock saves the relay toresult in the electricity to attract gathers, timer Tim10, Tim11 startfixed time, it fixed time time length visible end station leveldistance with ladder fast hypothesis. After on forces speed changing theswitch movement, the elevator transfers the slow train movement by theexpress train movement, in the normal condition, the previous line ofeven strata time elevator should stop. If the theater box has notstopped continues the line, when Tim10 supposes the definite value toreduce the zero hour, it the separation, the slow traincontact device and on the good contact device loses the electricity,the elevator stops moving. Bumps into after the arrogant theater boxon forces speed changing the switch, because certain reason elevators have notbeen able to transfer the slow train movement, and the express trainmovement contactdevice has not been able to release, when Tim11supposes the definite value to reduce the zero hour, it N.C. contactthe separation, the express train movement contact device and on thegood contact device loses the electricity, the elevator stops moving.Therefore, no matter is the slow train movement or the express trainmovement, so long as on forces speed changing the switch to send out thesignal, no matter the end stands other protection switches whetheract, can cause the elevator with the aid of Tim10 and Tim11 to stopmoving, thus causes the elevator end station protection to be morereliable.Under when the elevator needs the line, so long as had has chosen theladder instruction, got down the good directional relay to result inelectricity its Chang Kaidian closed, the lock saved the relay toreposition, Tim10 and Tim11 lost the electricity, it N.C. contactclosed for the elevator normal under line has prepared for. The lowerextremity stands the protection principle and the upper extremestation protection similar no longer duplicates.4.2.5 floors count; The floor counts uses relatively counts the way.Before the movement through from the study way, determines thecorresponding floor highly pulse number, corresponds 17 elevatorsseparately to store 16 memories units DM06 ~ DM21. The floor counter(CNT46) is a bidirectional counter, when arrives each level the floorcounts, according to moves the direction to carry on adds 1 or reduces1 to count. In the movement, the high speed counter tiredly estimates the valuereal-time counts the point correspondence pulse number with the floorto carry on the comparison, is equal when sends out the floor to countthe signal, the previous line of Canada 1, the next line reduces 1. Inorder to prevent the counter in counts the pulse high level periodrepetition to count, uses the floor to count on the signal along totrigger the floor counter.4.2.6 is fast speed changing; When the high speed counter value and the fastspeed changing point correspondence pulse number is equal, if the elevator isin the quick operating also this level has chooses the level signal,sends the fast speed changing signal. If the elevator medium speed movement oralthough the quick operating but this not chooses the level signal,then does not send speed changing the signal.4.2.7 areas signals; When high speed counter CNT47 value correspondsin the pulse number scope when the gate area, sends the gate areasignal.4.2.8 pulses signals failure detection; Pulse signal accurategathering and the transmission appears in the system especiallyimportantly, revolves the encoder for the examination and the pulsetransmission circuit breakdown, whether there is has designed thepulse signal and the errors and omissions pulse examination electriccircuit, guarantees the system normal operation through the real-timeexamination. In order to eliminate the pulse to count the accumulativeerror, in base station the establishment reset switch, turns on PLC highspeed counter CNT47 the replacement end.5. Software design characteristic5.1 uses the priority formationPosition and movement direction locates which according to theelevator, in the programming, has used four priorities formations,namely on good priority formation, on line of inferior priorityformation, under good priority formation, next line of inferiorpriority formation. When among them, on good priority formation forelevator upward movement, locates the upward movement calling signalin the elevator which above the position the floor sends out, thearray which should call which the signal cabin correspondence thefloor to have the pulse number depositing register constitutes. Whenprevious line of inferior priority formation for elevator upwardmovement, locates the upward movement calling signal in the elevatorwhich below the position the floor sends out, the formation whichshould call which the signal cabin correspondence the floor to havethe pulse number depositing register constitutes. Control system inelevator movement real-time arrangement four priorities exhibition,has provided the foundation for the realization stochastic logiccontrol.5.2 uses advanced first leaves the formationAccording to elevator movement direction, with to the priorityformation's in non-vanishing unit (has when call this unit is 70units, does not have when call then this unit for zero) (advancedsends in the register formation first to leave formation FIFO), theuse advanced first leaves the read-out instruction SFRDP instruction,sends in the FIFO first unit in data compares the register.5.3 uses the stochastic logical controlWhen the elevator approaches by some movement direction somefloor decelerates the position, distinguished whether this floor doeshave with to the calling signal (on a line of call symbolizedregister, next line of call symbolized when register, has callrequest, corresponding register is l, otherwise is 0), if has, thecorresponding register pulse number and the comparison register willcarry on the comparison, if will be same, then will decelerate in thisfloor stops: If is not same, then sends in this register data comparesthe register, and the original comparison register data preservation,carries out this floor to decelerate stops. After this movementfinished, the data which will preserve reis sent in compares theregister, will realize the stochastic logical control.5.4 uses the software demonstration The system use travelling schedule judgement floor, andtransforms the BCD code output, through hardware connection electriccircuit by LED demonstration.5.5 pair of frequency changers control PLC acts according to the stochastic logical control therequest, may send out to the frequency changer to the movement, thereverse movement, is decelerating as well as applies the brake thesignal, again controls the electrical machinery by the frequencychanger basis certain control rule and the control algorithm. At thesame time, when the system appears the breakdown, PLC to the frequencychanger sends out the signal.6. Concluding remark Uses elevator control system which the MIC340 elevatorspecial-purpose frequency changer constitutes, may realize theintellectualization which the elevator controls, but because theperiod of five days ladder and the elevator in person arrives eachlevel the population is the intelligent elevator is unable todetermine, even if uses the AITP artificial intelligence system, thetransmission transportation passenger flow information also is fuzzy,for solves the elevator this vertical transportation control systemtwo to be big cannot know the factor, will need us to go to theunceasing research and the exploration in the next work.译文:文中分析了电梯的负载特性,阐述了采用梯形加速曲线的电梯理想速度曲线,结合变频器和PLC的性能,论述了电梯控制系统的构成和工作特性。
PLC电梯控制英文文献(3600英词)
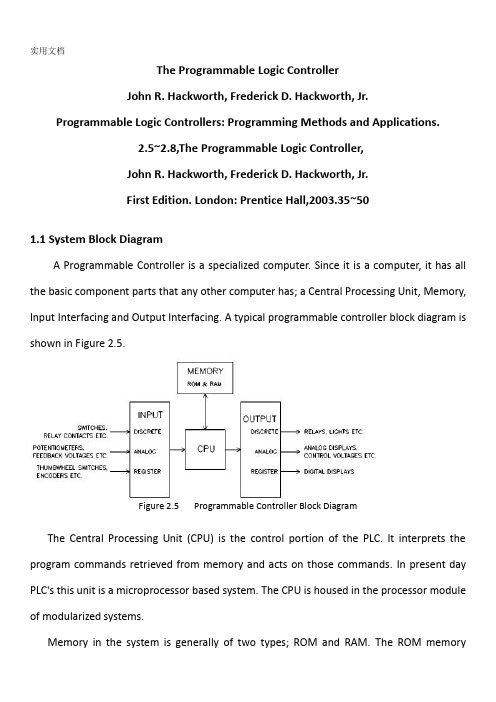
The Programmable Logic ControllerJohn R. Hackworth, Frederick D. Hackworth, Jr.Programmable Logic Controllers: Programming Methods and Applications.2.5~2.8,The Programmable Logic Controller,John R. Hackworth, Frederick D. Hackworth, Jr.First Edition. London: Prentice Hall,2003.35~501.1 System Block DiagramA Programmable Controller is a specialized computer. Since it is a computer, it has all the basic component parts that any other computer has; a Central Processing Unit, Memory, Input Interfacing and Output Interfacing. A typical programmable controller block diagram is shown in Figure 2.5.Figure 2.5 Programmable Controller Block DiagramThe Central Processing Unit (CPU) is the control portion of the PLC. It interprets the program commands retrieved from memory and acts on those commands. In present day PLC's this unit is a microprocessor based system. The CPU is housed in the processor module of modularized systems.Memory in the system is generally of two types; ROM and RAM. The ROM memorycontains the program information that allows the CPU to interpret and act on the Ladder Logic program stored in the RAM memory. RAM memory is generally kept alive with an on-board battery so that ladder programming is not lost when the system power is removed.This battery can be a standard dry cell or rechargeable nickel-cadmium type. Newer PLC units are now available with Electrically Erasable Programmable Read Only Memory (EEPROM) which does not require a battery. Memory is also housed in the processor module in modular systems.Input units can be any of several different types depending on input signals expected as described above. The input section can accept discrete or analog signals of various voltage and current levels. Present day controllers offer discrete signal inputs of both AC and DC voltages from TTL to 250 VDC and from 5 to 250 VAC. Analog input units can accept input levels such as ±10 VDC, ±5 VDC and 4-20 ma. current loop values. Discrete input units present each input to the CPU as a single 1 or 0 while analog input units contain analog to digital conversion circuitry and present the input voltage to the CPU as binary number normalized to the maximum count available from the unit. The number of bits representing the input voltage or current depends upon the resolution of the unit. This number generally contains a defined number of magnitude bits and a sign bit. Register input units present the word input to the CPU as it is received (Binaryor BCD).Output units operate much the same as the input units with the exception that the unit is either sinking (supplying a ground) or sourcing (providing a voltage) discrete voltages or sourcing analog voltage or current. These output signals are presented as directed by theCPU. The output circuit of discrete units can be transistors for TTL and higher DC voltage or Triacs for AC voltage outputs. For higher current applications and situations where a physical contact closure is required, mechanical relay contacts are available. These higher currents, however, are generally limited to about 2-3 amperes. The analog output units have internal circuitry which performs the digital to analog conversion and generates the variable voltage or current output.1.2 Update - Solve the Ladder - UpdateWhen power is applied to a programmable logic controller, the PLC’s operation consists of two steps: (1) update inputs and outputs and (2) solve the ladder. This may seem like a very simplistic approach to something that has to be more complicated but there truly are only these two steps.If these two steps are thoroughly understood, writing and modifying programs and getting the most from the device is much easier to accomplish. With this understanding, the things that can be undertaken are then up to the imagination of the programmer.You will notice that the “update - solve the ladder” sequence begins after startup. The actual startup sequence includes some operations transparent to the user or programmer that occur before actual PLC operation on the user program begins. During this startup there may be extensive diagnostic checks performed by the processor on things like memory, I/O devices, communication with other devices (if present) and program integrity. In sophisticated modular systems, the processor is able to identify the various module types, their location in the system and address. This type of system analysis and testing generally occurs during startup before actual program execution.1.3 UpdateThe first thing the PLC does when it begins to function is update I/O. This means that all discrete input states are recorded from the input unit and all discrete states to be output are transferred to the output unit. Register data generally has specific addresses associated with it for both input and output data referred to as input and output registers. These registers are available to the input and output modules requiring them and are updated with the discrete data. Since this is input/output updating, it is referred to as I/O Update. The updating of discrete input and output information is accomplished with the use of input and output image registers set aside in the PLC memory. Each discrete input point has associated with it one bit of an input image register. Likewise, each discrete output point has one bit of an output image register associated with it. When I/O updating occurs, each input point that is ON at that time will cause a 1 to be set at the bit address associated with that particular input. If the input is off, a 0 will be set into the bit address. Memory in today's PLC's is generally configured in 16 bit words. This means that one word of memory can store the states of 16 discrete input points.Therefore, there may be a number of words of memory set aside as the input and output image registers. At I/O update, the status of the input image register is set according to the state of all discrete inputs and the status of the output image register is transferred to the output unit.This transfer of information typically only occurs at I/O update. It may be forced to occur at other times in PLC's which have an Immediate I/O Update command. This command will force the PLC to update the I/O at other times although this would be a special case.One major item of concern about the first output update is the initial state of outputs.This is a concern because their may be outputs that if initially turned on could create a safety hazard, particularly in a system which is controlling heavy mechanical devices capable of causing bodily harm to operators. In some systems, all outputs may need to be initially set to their off state to insure the safety of the system. However, there may be systems that require outputs to initially be set up in a specific way, some on and some off. This could take the form of a predetermined setup or could be a requirement that the outputs remain in the state immediately before power-down. More recent systems have provisions for both setup options and even a combination of the two. This is a prime concern of the engineer and programmer and must be defined as the system is being developed to insure the safety of personnel that operate and maintain the equipment. Safety as related to system and program development will be discussed in a later chapter.1.4 Solve the LadderAfter the I/O update has been accomplished, the PLC begins executing the commands programmed into it. These commands are typically referred to as the ladder diagram. The ladder diagram is basically a representation of the program steps using relay contacts and coils. The ladder is drawn with contacts to the left side of the sheet and coils to the right.This is a holdover from the time when control systems were relay based.This type of diagram was used for the electrical schematic of those systems.A sample ladder diagram is shown in Figure 2-6.Figure 2-6 Sample Ladder DiagramThe symbols used in Figure 2.6 may be foreign at this point, so a short explana ---tion will be necessary. The symbols at the right of the ladder diagram labeled CR1, CR2, CR3 and CR4 and are circular in shape are the software coils of the relays. The symbols at the left which look like capacitors, some with diagonal lines through them , are the contacts associated with the coils. The symbols that look like capacitors with --out the diagonal lines through them are normally open contacts. These are analogous to a switch that is normally off. When the switch is turned on, the contact closes. The contact symbols at the left that look like capacitors with diagonal lines through them are normally closed contacts. A normally closed contact is equivalent to a switch that is normally turned on. It will turn off when the switch is actuated.As can be seen in Figure 2.6, contact and coil position is as described above. Also, one can see the reason for the term ladder diagram if the rungs of a stepladder are visualized. In fact, each complete line of the diagram is referred to as one rung of logic. The actual interpretation of the diagram will also be discussed later although some explanationis required here.The contact configuration on the left side of each rung can be visualized as switches and the coils on the right as lights.If the switches are turned on and off in the proper configuration, the light to the right will illuminate.The PLC executes this program from left to right and top to bottom, in that order.It first looks at the switch (contact) configuration to determine if current can be passed to the light (coil).The data for this decision comes from the output and input image registers.If current can be passed, the light (coil) will then be turned on.If not, the light (coil) will be turned off.This is recorded in the output image register Once the PLC has looked at the left side of therung it ignores the left side of the rung until the next time it solves that particular rung. Once the light (coil) has been either turned on or off it will remain in that state until the next time the PLC solves that particular rung.After solving a rung, the PLC moves on to solve the next rung in the same manner and so forth until the entire ladder has been executed and solved.One rule that is different from general electrical operation is the direction of current flow in the rung.In a ladder logic, rung current can only flow from left to right and up and down; never from right to left.As an example, in the ladder shown in Figure 2.7, coil CR1 will energize if any of thefollowing conditions exist:Figure 2.7 Illustration of allowed current flow in ladder rung1. CR7 is off, CR6 is on.2. CR7 is off, CR2 is on, CR5 is on.3. CR7 is off, CR2 is on, CR3 is on.4. CR1 is on, CR4 is on, CR3 is on.5. CR1 is on, CR4 is on, CR5 is on.You will notice that the current flow in the circuit in each of the cases listed above is from left to right and up and down. CR1 will not energize in the case listed below: CR1 is on, CR4 is on, CR2 is on, CR6 is on, CR5 is off, CR3 is off, CR7 is on.This is because current would have to flow from right to left through the CR2 contact. This is not allowed in ladder logic even though current could flow in this direction if we were to build it with real relays.Remember, we are working in the software world not the hardware world.To review, after the I/O update, the PLC moves to the first rung of ladder logic.It solves the contact configuration to determine if the coil is to be energized or de-energized.It then energizes or de-energizes the coil.After this is accomplished, it moves to the left side of the next rung and repeats the procedure.This continues until all rungs have been solved. When this procedure is complete with all rungs solved and all coils in the ladder set up according to the solution of each rung, the PLC proceeds to the next step of it's sequence, the I/O update.At I/O update, the states of all coils which are designated as outputs are transferred from the output image register to the output unit and the states of all inputs are transferred to the input image register.Note that any input changes that occur during the solution of the ladder are ignored because they are only recorded at I/O update time.The state of each coil is recorded to the output image register as each rung is solved. However, these states are not transferred to the output unit until I/O update time.Figure2.8 Scan CycleThis procedure of I/O update and solving the ladder diagram and I/O update is referred to as scanning and is represented in Figure 2.8. The period between one I/O update and the next is referred to as one Scan.The amount of time it takes the PLC to get from one I/O update to the next is referred to as Scan Time.Scan time is typically measured in milliseconds and is related to the speed of the CPU and the length of the ladder diagram that has to be solved .The slower the processor or the longer the ladder diagram, the longer the scan time of the system.The speed at which a PLC scans memory is referred to as Scan Rate.Scan rate units are usually listed in msec/K of memory being utilized for the program.As an example, if a particular PLC has a rated scan rate of 8 msec/K and the program occupies 6K of memory, it will take the PLC 48 msec to complete one scan of the program.1.5.MotivationProgrammable Logic Controllers (PLC), a computing device invented by Richard E. Morley in 1968, have been widely used in industry including manufacturing systems, transportation systems, chemical process facilities, and many others. At that time, the PLC replaced thehardwired logic with soft-wired logic or so-called relay ladder logic (RLL), aprogramming language visually resembling the hardwired logic, and reduced thereby the configuration time from 6 months down to 6 days [Moody and Morley, 1999 Although PC based control has started to come into place, PLC based control will remain the technique to which the majority of industrial applications will adhere due to its higher perfor- mance, lower price, and superior reliability in harsh environments. Moreover, according to a study on the PLC market of Frost and Sullivan [1995], an increase of the annual sales volume to 15 million PLCs per year with the hardware value of more than 8 billion US dollars has been predicted, though the prices of computing hardware is steadily dropping. The inventor of thePLC, Richard E Morley, fairly considers the PLC market as a5-billion industry at the present time.Though PLCs are widely used in industrial practice, the programming of PLC based control systems is still very much relying on trial-and-error. Alike software engineering, PLC software design is facing the software dilemma or crisis in a similar way. Morley himself emphasized this aspect most forcefully by indicating [Moody and Morley, 1999, p. 110“If houses were built like soft ware projects, a single woodpecker could destroy civilization.”Particularly, practical problems in PLC programming are to eliminate software bugs and to reduce the maintenance costs of old ladder logic programs. Though the hardware costs of PLCs are dropping continuously, reducing the scan time of the ladder logic is still an issue in industry so that low-cost PLCs can be used.In general, the productivity in generating PLC is far behind compared to other domains, for instance, VLSI design, where efficient computer aided design tools are in practice. Existent software engineering methodologies are not necessarily applicable to the PLC based software design because PLC-programming requires a simultaneous consideration ofhardware and software. The software design becomes, thereby, more and more the major cost driver. In many industrial design projects, more than SO0/a of the manpower allocated for the control system design and installation is scheduled for testing and debugging PLC programs [Rockwell, 1999].In addition, current PLC based control systems are not properly designed to support the growing demand for flexibility and reconfigurability of manufacturing systems. A further problem, impelling the need for a systematic design methodology, is the increasing software complexity in large-scale projects1.6.Objective and Significance of the ThesisThe objective of this thesis is to develop a systematic software design methodology for PLC operated automation systems. The design methodology involves high-level description based on state transition models that treat automation control systems as discrete event systems, a stepwise design process, and set of design rules providing guidance and measurements to achieve a successful design. The tangible outcome of this research is to find a way to reduce the uncertainty in managing the control software development process, hat is, reducing programming and debugging time and their variation, increasing flexibility of the automation systems, and enabling software reusability through modularity. The goal is to overcome shortcomings of current programming strategies that are based on the experience of the individual software developerDesign Theory DevelopmentToday, the primary focus of most design research is based on mechanical or electrical products. One of the by-products of this proposed research is to enhance our fundamental understanding of design theory and methodology by extending it to the field of engineeringsystems design. A system design theory for large-scale and complex system is not yet fully developed. Particularly, the question of how to simplify a complicated or complex design task has not been tackled in a scientific way. Furthermore, building a bridge between design theory and the latest epistemological outcomes of formal representations in computer sciences and operations research, such as discrete event system modeling, can advance future development in engineering designApplication in Logical Hardware DesignFrom a logical perspective, PLC software design is similar to the hardware design of integrated circuits. Modern VLSI designs are extremely complex with several million parts and a product development time of 3 years [Whitney, 1996]. The design process is normally separated into a component design and a system design stage. At component design stage, single functions are designed and verified. At system design stage, components are aggregated and the whole system behavior and functionality is tested through simulation. In general, a complete verification is impossible. Hence, a systematic approach as exemplified for the PLC program design may impact the logical hardware designPLCPLC (programmable logical controller )face ever more complex challenge these days. Where once they quietly relays and gave an occasional report to a corporate mainframe, they are now grounded into cells, give new jobs and new languages, and are forced to compete against a growing array of control products. For this year ’s annual PLC technology update, we queried PLC makers on these topics and moreProgramming languagesHigher level PLC programming languages have been around for some time, but latelytheir popularity has been mushrooming. As Raymond Lavelle, vice president and general manager, Siemens Energy and Automation. Inc, Programmable Controls Division, points out : ” As programmable controls are being used for more and more sophisticated operations, languages other than ladder logic become more practical, efficient, and powerful. For example, it's very difficult to write a trigonometric function using ladder logic. ” Languages gaining acceptance include Boolean, control system flowcharting, and such function chart languages as Graphtec and its variations. And these’s increasing interest in languages like C and BASIC.PLCs in process control Thus far, PLCs have not been used extensively for continuous process control. Will this continue? ”The feeling that I ’ve gotten, ” says Ken Jeannette, manager, product planning, Series One and Series Six products, at GE Frame North America, "is that PLCs will be used in the process industry but not necessarily for process control.”Several vendors-obviously betting that the opposite will happen-have introduced PLCs optimized for process applications. Rich Ryan ,manager, commercial marketing, Allen-Bradley Programmable Controls Div, cites PLCs ’ increasing use in such industries as food, chemicals,and petroleum. Ryan feel there are two types of applications in which they’re appropriate.”One,"he says, "is where the size of the process control system that's being automated doesn’t justify DCS[distributed control systems].With the starting price tags of those products being relatively high, a programmable controller makes sense for small, low loop count applications. The seconds where you have to integrate the loop closely with the sequential logic. Batch controller sere prime examples, where the sequence and maintaining the process variable are intertwined so closely that the benefits of having a programmable controller to do the sequential logic outweighs someof the disadvantages of not having a distributed control system.”Bill Barkovtz, president of Triconex, predicts that "all future controllers that come out in the process control system business will embrace a lot more PLC technology and a lot more PLC functionality than they ever did before.”中文翻译可编程逻辑控制器约翰R Hackworth,弗雷德里克 D Hackworth.可编程逻辑控制器:编程方法及应用.2.5~2.8,可编程逻辑控制器,约翰R Hackworth,弗雷德里克 D Hackworth第一版. 伦敦:普伦蒂斯霍尔出版社,2003,35~50一系统框图可编程控制器是一种专用的计算机。
(完整版)PLC毕业设计的外文文献(及翻译)
PLC technique discussion and future developmentT.J.byersElectronic Test Equipment-principles and ApplicationsPrinceton University .AmericaAlong with the development of the ages, the technique that is nowadays is also gradually perfect, the competition plays more strong; the operation that list depends the artificial has already can't satisfied with the current manufacturing industry foreground, also can't guarantee the request of the higher quantity and high new the image of the technique business enterprise.The people see in produce practice, automate brought the tremendous convenience and the product quantities for people up of assurance, also eased the personnel's labor strength, reduce the establishment on the personnel. The target control of the hard realization in many complicated production lines, whole and excellent turn, the best decision etc, well-trained operation work, technical personnel or expert, governor but can judge and operate easily, can acquire the satisfied result. The research target of the artificial intelligence makes use of the calculator exactly to carry out, imitate these intelligences behavior, moderating the work through person's brain and calculators, with the mode that person's machine combine, for resolve the very complicated problem to look for the best path.We come in sight of the control that links after the electric appliances in various situation, that is already the that time generation past, now of after use in the mold a perhaps simple equipments of grass-roots control that the electric appliances can do for the low level only; And the PLC emergence also became the epoch-making topic, adding the vivid software control through a very and stable hardware, making the automation head for the new high tide.The PLC biggest characteristics lie in: The electrical engineering teacher already no longer electric hardware up too many calculations of cost, as long as order the importation that the button switch or the importation of the sensors order to link the PLC up can solve problem, pass to output to order the conjunction contact machine or control the start equipments of the big power after the electric appliances, but the exportation equipmentsdirect conjunction of the small power can.PLC internal containment have the CPU of the CPU, and take to have an I/ O for expand of exterior to connect a people's address and saving machine three big pieces to constitute, CPU core is from an or many is tired to add the machine to constitute, mathematics that they have the logic operation ability, and can read the procedure save the contents of the machine to drive the homologous saving machine and I/ Os to connect after pass the calculation; The I/ O add inner part is tired the input and output system of the machine and exterior link, and deposit the related data into the procedure saving machine or data saving machine; The saving machine can deposit the data that the I/ O input in the saving machine, and in work adjusting to become tired to add the machine and I/ Os to connect, saving machine separately saving machine RAM of the procedure saving machine ROM and dates, the ROM can do deposit of the data permanence in the saving machine, but RAM only for the CPU computes the temporary calculation usage of hour of buffer space.The PLC anti- interference is very and excellent, our root need not concern its service life and the work situation bad, these all problems have already no longer become the topic that we fail, but stay to our is a concern to come to internal resources of make use of the PLC to strengthen the control ability of the equipments for us, make our equipments more gentle.PLC language is not we imagine of edit collected materials the language or language of Cs to carry on weaving the distance, but the trapezoid diagram that the adoption is original after the electric appliances to control, make the electrical engineering teacher while weaving to write the procedure very easy comprehended the PLC language, and a lot of non- electricity professional also very quickly know and go deep into to the PLC.Is PLC one of the advantage above and only, this is also one part that the people comprehend more and easily, in a lot of equipments, the people have already no longer hoped to see too many control buttons, they damage not only and easily and produce the artificial error easiest, small is not a main error perhaps you can still accept; But lead even is a fatal error greatly is what we can't is tolerant of. New technique always for bringing more safe and convenient operation for us, make we a lot of problems for face on sweep but light, do you understand the HMI? Says the HMI here you basically not clear what it is, also have no interest understanding, change one inside text explains it into the touch to hold orman-machine interface you knew, it combines with the PLC to our larger space.HMI the control not only is reduced the control press button, increase the vivid of the control, more main of it is can sequence of, and at can the change data input to output the feedback with data, control in the temperature curve of imitate but also can keep the manifestation of view to come out. And can write the function help procedure through a plait to provide the help of various what lies in one's power, the one who make operate reduces the otiose error. Currently the HMI factory is also more and more, the function is also more and more strong, the price is also more and more low, and the noodles of the usage are wide more and more. The HMI foreground can say that think to be good.At a lot of situations, the list is a smooth movement that can't guarantee the equipments by the control of the single machine, but pass the information exchanges of the equipments and equipments to attain the result that we want. For example fore pack and the examination of the empress work preface, we will arrive wrapping information feedback to examine the place, and examine the information of the place to also want the feedback to packing. Pass the information share thus to make both the chain connect, becoming a total body, the match of your that thus make is more close, at each other attain to reflect the result that mutually flick.The PLC correspondence has already come more body now its value, at the PLC and correspondence between Places, can pass the communication of the information and the share of the data’s to guarantee that of the equipments moderates mutually, the result that arrive already to repair with each other. Data conversion the adoption RS232 between PLC connect to come to the transmission data, but the RS232 pick up a people and can guarantee 10 meters only of deliver the distance, if in the distance of 1000 meters we can pass the RS485 to carry on the correspondence, the longer distance can pass the MODEL only to carry on deliver.The PLC data transmission is just to be called a form to it in a piece of and continuous address that the data of the inner part delivers the other party, we, the PLC of the other party passes to read data in the watch to carry on the operation. If the data that data in the watch is a to establish generally, that is just the general data transmission, for example today of oil price rise, I want to deliver the price of the oil price to lose the oil ally on board, that is the share of the data; But take data in the watch for an instruction procedure that controls the PLC, that had the difficulty very much, for example you have to control one pedestal robot to pressthe action work that you imagine, you will draw up for it the form that a procedure combine with the data sends out to pass by.The form that information transport contain single work, the half a work and the difference of a workers .The meaning of the single work also is to say both, a can send out only, but a can receive only, for example a spy he can receive the designation of the superior only, but can't give the superior reply; A work of half is also 2 and can send out similar to accept the data, but can't send out and accept at the same time, for example when you make a phone call is to can't answer the phone, the other party also; But whole pair works is both can send out and accept the data, and can send out and accept at the same time. Be like the Internet is a typical example.The process that information transport also has synchronous and different step cent: The data line and the clock lines are synchronous when synchronous meaning lie in sending out the data, is also the data signal and the clock signals to be carry on by the CPU to send out at the same time, this needs to all want the specialized clock signal each other to carry on the transmission and connect to send, and is constrained, the characteristics of this kind of method lies in its speed very quick, but correspond work time of take up the CPU and also want to be long oppositely, at the same time the technique difficulty also very big. Its request lies in canting have an error margins in a dates deliver, otherwise the whole piece according to compare the occurrence mistake, this on the hardware is a bigger difficulty. Applied more and more extensive in some appropriative equipments, be like the appropriative medical treatment equipments, the numerical signal equipments...etc., in compare the one data deliver, its result is very good.And the different step is an application the most extensive, this receive benefit in it of technique difficulty is opposite and want to be small, at the same time not need to prepare the specialized clock signal, its characteristics to lie in, its data is partition, the long-lost send out and accept, be the CPU is too busy of time can grind to a stop sex to work, also reduced the difficulty on the hardware, the data throw to lose at the same time opposite want to be little, we can pass the examination of the data to observe whether the data that we send out has the mistake or not, be like strange accidentally the method, tired addition and eight efficacies method etc, can use to helps whether the data that we examine to send out have or not themistake occurrence, pass the feedback to carry on the discriminator.A line of transmission of the information contains a string of and combines the cent of: The usual PLC is 8 machines, certainly also having 16 machines. We can be at the time of sending out the data a send out to the other party, also can be 88 send out the data to the other party, and 8 differentiations are also the as that we say to send out the data and combine sends out the data. A speed is more and slowly, but as long as 2 or three lines can solve problem, and can use the telephone line to carry on the long range control. But combine the ocular transmission speed is very quick of, it is a string of ocular of 25600%, occupy the advantage in the short distance, the in view of the fact TTL electricity is even, being limited by the scope of one meter generally, it combine unwell used for the data transmission of the long pull, thus the cost is too expensive.Under a lot of circumstances we are total to like to adopt the string to combine the conversion chip to carry on deliver, under this kind of circumstance not need us to carry on to deposited the machine to establish too and complicatedly, but carry on the data exchanges through the data transmission instruction directly, but is not a very viable way in the correspondence, because the PLC of the other party must has been wait for your data exportation at the time of sending out the data, it can't do other works.When you are reading the book, you hear someone knock on door, you stop to start up of affair, open the door and combine to continue with the one who knock on door a dialogue, the telephone of this time rang, you signal hint to connect a telephone, after connecting the telephone through, return overdo come together knock on door to have a conversation, after dialogue complete, you continue again to see your book, this kind of circumstance we are called the interruption to it, it has the authority, also having sex of have the initiative, the PLC had such function .Its characteristics lie in us and may meet the urgently abrupt affairs in the operation process of the equipments, we want to stop to start immediately up of work, the whereabouts manages the more important affair, this kind of circumstance is we usually meet of, PLC while carry out urgent mission, total will keep the current appearance first, for example the address of the procedure, CPU of tired add the machine data etc., be like to stick down which the book that we see is when we open the door the page or simply make a mark, because we treat and would still need to continue immediately after book of see the behind.The CPU always does the affair that should do according to our will, but your mistake of give it an affair, it also would be same to do, this we must notice.The interruption is not only a, sometimes existing jointly with the hour several inside break, break off to have the preferred Class, they will carry out the interruption of the higher Class according to person's request. This kind of breaks off the medium interruption to also became to break off the set. The Class that certainly breaks off is relevant according to various resources of CPU with internal PLC; also following a heap of capacity size of also relevant fasten.The contents that break off has a lot of kinds, for example the exterior break off, correspondence in of send out and accept the interruption and settle and the clock that count break off, still have the WDT to reset the interruption etc., they enriched the CPU to respond to the category while handle various business. Speak thus perhaps you can't comprehend the internal structure and operation orders of the interruption completely also, we do a very small example to explain.Each equipment always will not forget a button, it also is at we meet the urgent circumstance use of that is nasty to stop the button. When we meet the Human body trouble and surprised circumstances we as long as press it, the machine stops all operations immediately, and wait for processing the over surprised empress recover the operation again. Nasty stop the internal I/ O of the internal CPU of the button conjunction PLC to connect up, be to press button an exterior to trigger signal for CPU, the CPU carries on to the I/ O to examine again, being to confirm to have the exterior to trigger the signal, CPU protection the spot breaks off procedure counts the machine turn the homologous exterior I/ O automatically in the procedure to go to also, be exterior interruption procedure processing complete, the procedure counts the machine to return the main procedure to continue to work. Have 1:00 can what to explain is we generally would nasty stop the button of exterior break off to rise to the tallest Class, thus guarantee the safety.When we are work a work piece, giving the PLC a signal, counting PLC inner part the machine add 1 to compute us for a day of workload, a count the machine and can solve problem in brief, certainly they also can keep the data under the condition of dropping the electricity, urging the data not to throw to lose, this is also what we hope earnestly.The PLC still has the function that the high class counts the machine, being us while accept some dates of high speed, the high speed that here say is the data of the in all aspects tiny second class, for example the bar code scanner is scanning the data continuously, calculating high-speed signal of the data processor DSP etc., we will adopt the high class to count the machine to help we carry on count. It at the PLC carries out the procedure once discover that the high class counts the machine to should of interruption, will let go of the work on the hand immediately. The trapezoid diagram procedure that passes by to weave the distance again explains the high class for us to carry out procedure to count machine would automatic performance to should of work, thus rise the Class that the high class counts the machine to high one Class.You heard too many this phrases perhaps:" crash", the meaning that is mostly is a workload of CPU to lead greatly, the internal resources shortage etc. the circumstance can't result in procedure circulate. The PLC also has the similar circumstance, there is a watchdog WDT in the inner part of PLC, we can establish time that a procedure of WDT circulate, being to appear the procedure to jump to turn the mistake in the procedure movement process or the procedure is busy, movement time of the procedure exceeds WDT constitution time, the CPU turn but the WDT reset the appearance. The procedure restarts the movement, but will not carry on the breakage to the interruption.The PLC development has already entered for network ages of correspondence from the mode of the one, and together other works control the net plank and I/ O card planks to carry on the share easily. A state software can pass all se hardwires link, more animation picture of keep the view to carries on the control, and cans pass the Internet to carry on the control in the foreign land, the blast-off that is like the absolute being boat No.5 is to adopt this kind of way to make airship go up the sky.The development of the higher layer needs our continuous effort to obtain. The PLC emergence has already affected a few persons fully, we also obtained more knowledge and precepts from the top one experience of the generation, coming to the continuous development PLC technique, push it toward higher wave tide.可编程控制器技术讨论与未来发展T.J.拜尔斯(电子测试设备原理及应用普林斯顿大学)随着时代的发展,当今的技术也日趋完善、竞争愈演愈烈;单靠人工的操作已不能满足于目前的制造业前景,也无法保证更高质量的要求和高新技术企业的形象。
基于plc电梯控制外文文献翻译、中英文翻译、外文翻译
In the article has analyzed the elevator loadcharacteristics, elaborated uses the trapezoid acceleration curve theelevator ideal velocity curve, unifies the frequency changer and thePLC performance, elaborated the elevator control system constitutionand the operational factor. Elaborated the elevator speed curveproduces the method, has induced the characteristic which designs byPLC constitution control system software.Key word: Load characteristics ideal velocity curve control systemsoftware design1. OutlineAlong with the urban construction unceasing development, thehigh-rise construction unceasingly increases, the elevator has thewidespread application in the national economy and the life. Theelevator took in the high-rise construction the vertical movementtransportation vehicle already and people's daily life is inseparable.In fact the elevator is according to exterior movement and so oncalling signal as well as own control rule, but calls is stochastic,the elevator is a person machine interactive control system in fact,purely is cannot satisfy the control request with the sequentialcontrol or the logical control, Therefore, the elevator control system uses the stochastic logical waycontrol. At present the elevator control generally has selected twomethods, one is uses the microcomputer to take the signal controlunit, completes the elevator signal gathering, the running status andthe function hypothesis, realizes the elevator automatic dispatch andthe collection chooses the movement function, drives the control tocomplete by the frequency changer; The second control mode (PLC)substitutes for the microcomputer realization signal collection withthe programmable controller to choose the control. Said from the control mode and the performance, these two methodscertainly not too big difference. The domestic factory mostly choosesthe second way, its reason lies in the production scale slightly, owndesign and the manufacture microcomputer control device cost ishigher; But PLC reliability high, programming convenience nimble, theantijamming ability strong, the movement stable is reliable and so onthe characteristic, therefore the present elevator control systemwidely uses the programmable controller to realize.2. Elevator ideal performance diagramIndicated according to the massive research and the experiment, theperson may accept the maximum acceleration is am <= 1.5m/s2,acceleration rate of change rho m <= the 3m/s3, elevator idealperformance diagram may divide according to the acceleration is thetriangle, the trapezoid and the sine profile, As a result of sine profile acceleration curve realization moredifficult, but the triangle curve maximum acceleration and is startingand applies the brake the section turning point acceleration rate ofchange to be bigger than the trapezoidal curve, namely + rho m jumpsto - rho m or jumps from - rho m to + rho the m acceleration rate ofchange, therefore very little uses, because the trapezoidal curve iseasy to realize and has the good acceleration rate of change frequenttarget, therefore is widely used, uses the trapezoidal accelerationcurve elevator ideal performance diagram like chart 1 to show: The intelligent frequency changer is for the elevator special-purposefrequency changer request and so on elevator nimble velocitymodulation, control and high accuracy even level which but speciallydesigns, may use for parts the general three-phase asynchronous motor,and has function and so on intellectualized software, standardconnection, menu prompt, input elevator curve and other essentialparameter. It has the debugging convenience quickly, moreover can automaticallyrealize the single multilayered function, and has the automaticoptimization deceleration curve the function, is composed the velocitymodulation system crawling time by it few, the even level distance isshort, no matter is the double winding electric motor, or electric motor suitable, its highest design speed may reach 4m/s, itsunique computer monitoring software, may choose the serial interfacerealization input/output signal the non- electronic contact control. The frequency changer constitutes elevator system, when the frequencychanger receives the controller to send out shouts the ladderdirection signal, the frequency changer basis hypothesis speed and theacceleration value, the starting motor, after achieved the maximumspeed, the uniform speed moves, when arrives the goal leveldecelerates, the controller sends out shuts off the high velocitysignal, reduces the speed which the frequency changer establishes themaximum speed to reduce to the crawling speed, In decelerates in the movement process, the frequency changer can theautomatic computation decelerate to the even level spot betweendistance, and calculates the optimized curve, thus canaccording tothe optimized curve movement, cause the low speed crawling time toreduce to 0.3s, the frequency changer through adjusts leveling thespeed in the elevator even level process or applies the brake thepitch to adjust leveling the precision. Namely when the elevator stops too early, the frequency changerincreases the low speed value or the reduction applies the brake thepitch value, otherwise reduces the low speed value or increasesapplies the brake the pitch value, when the elevator to leaves evenlevel position 4 - 10cm, has the even level switch automaticseparation low speed signal, the system according to the optimizedcurve realization high accuracy even level, thus achieved the evenlevel accurate is reliable.3. Elevator speed curveElevator movement comfortableness is decided in its movementprocess acceleration a and the acceleration rate of change p size, theoversized acceleration or the acceleration rate of change can createpassenger's ill feeling. At the same time, for guaranteed the elevatorthe operating efficiency, a, the p value not suitable excessively issmall. Can guarantee a, the p best value elevator performance diagramis called the elevator the ideal performance diagram. The elevatormovement ideal curve should be the parabola - straight linecomprehensive velocity curve, namely elevator Canada, reduces theprocess constitutes by the parabola and the straight line. Theelevator assigns the curve is whether ideal, direct influence actualperformance diagram.3.1 velocity curves have the methodUses FX2-64MR PLC, and a consideration input output requestincreased FX-8EYT, FX-16EYR, the FX-8EYR three expansions modules andthe FX2-40AW twisted pair line correspondence adapter, FX2-40AW usesin the system serial communication. Using PLC the expansion functionmodule D/A module realization speed ideal curve output, whenbeforehand the digitized ideal velocity curve stores the PLC register,the procedure movement, through looks up the table way to read in D/A,transforms the simulation quantity after D/A the speed ideal curveoutput.3.2 Acceleration assign the curve the production8 D/A outputs 0 ~ 5V/0 ~ 10V, the corresponding numerical valueis 16 enters system several 00 ~ FF, altogether 255 levels. Ifelevator rise time between 2.5 ~ 3seconds. According to theconservative value computation, in the elevator acceleration processeach time Zha Biao time-gap not suitably surpasses 10ms.As a result of elevator logic control section procedure biggest, butthe PLC movement uses the cyclical scanning mechanism, thus usuallyuses looks up the table method, Zha Biao instruction time-gapexcessively is each time long, cannot satisfiedly assign the curve theprecision request. In the PLC movement process, its CPU with variousequipment between exchange of information, user program execution,signal gathering, control quantity operation and so on output all isdefers to the fixed order to circulate the scanning way to carry on,each circulation all must carry on the inquiry, the judgement and theoperation to all functions. This kind of order and the form capableperson are not the change. The usual scanning cycle, is basic mustcomplete six steps the work, including movement surveillance, andprogramming exchange information, and digital processor exchangeinformation, and communication processor exchange information,execution user program and input output connection service and so on.In a cycle, CPU only carries out to the entire user program. This kindof mechanism has its convenient one side, but timeliness is bad. Theexcessively long scanning time, directly affects the system to thesignal response effect, in under the guarantee control functionpremise, maximum limit reduces CPU the cyclical scanning time is avery complex question. Generally only can short adopt the method fromthe user program execution time. The elevator logic control sectionprocedure scanning time has surpassed 10ms, although has adopted somereduced procedure scanning time means, but still will be unable toscan the time to fall to 10ms below. At the same time, applies thebrake the section curve to use according to is away from theprinciple, each section of distances arrive the response time notsuitably surpasses 10ms. In order to satisfy the system the timelyrequest, in the velocity curve production way, uses the severancemethod, thus effectively has overcome the PLC scanning mechanismlimit.The starting acceleration movement by decides the cycle interruptservice isr to complete. This kind of severance cannot carry on theswitch by the procedure, once establishes, continuously presses thehypothesis time-gap circulation severance,therefore, the startingmovement condition must put in the interrupt service isr, when doesnot satisfy the movement condition, the severance namely returns.3.2 Decelerates applies the brake the curve productionIn order to guarantee applies the brake process completing,must carry on in the master routine applies the brake the condition tojudge and to decelerate a determination. In decelerates before adetermination, the elevator continuously is in the acceleration or thesteady fast movement process. The acceleration process completes bythe fixed cyclical severance, accelerates after the correspondingpattern maximum value, the acceleration procedure movement conditionno longer satisfies, after each time severs, no longer carries out theacceleration procedure, directly returns from the severance. Theelevator corresponds the pattern the maximum value movement,decelerates in this pattern to after, has the high-speed countingseverance, the execution decelerates the service routine. Revises thecounter in this interrupt service isr to suppose the definite valuethe condition, guaranteed the next time will sever the execution. In the PLC internal register, deceleration curve table value from big to small , each time severs all carries out time "theindicator needle to add 1" the operation, then the next severance willlook up the table number is smaller than this severance to look up the table numbers. Thegate area peaceful level area judgement produces by exterior signal,guarantees the moderating process the reliability.4. Elevator control system4.1 Elevators control system characteristicIs relates the elevator movement comfortable feeling target in theelevator performance diagram start section the key link, but thecomfortable feeling with the acceleration direct correlation,according to controls the theory, must cause some quantity accordingto prearrange the rule change to have to carry on the positivegoverning to it, said regarding the elevator control system, mustcause the acceleration to have to use the acceleration feedbackaccording to the ideal curve change, according to electric motormoment of force equation: M - MZ= Delta M=J (dn/dt), obviously theacceleration rate of change had reflected the system dynamic extensionis apart from the change, the control acceleration is apart from DeltaM=M - MZ on the control system dynamic extension. Therefore uses theacceleration in thissection the timing control principle, when thestart ascent portion speed achieved when stable state value 90%,systematically will cut the speed control from the accelerationcontrol, because in the steady fast section, the speed will besmaller for the permanent value control undulation, the accelerationchange will not be big, also will use the speed closed-loop controlto be allowed to cause the stable state speed hold certain precision,will be applies the brake the section precise even level to create thecondition. Uses the PI regulator control in the system speed ascentportion and steady fast Duan Suidu, but two section of PI parameter isdifferent, enhances the system the dynamic response target.Applies the brake the section in the system, namely must to reduce thespeed to carry on the essential control, guarantees the comfortablefeeling, also must strictly controls according to the elevatormovement speed and the distance relations, guarantees the even levelthe precision. In system’s rotational speed reduces to 120r/min in front of, in orderto enable two to obtain the proper attention to both, adopts by theacceleration to the timing control primarily, simultaneously actsaccording to on each as soon as the stopping distance the actualrotational speed and the theory rotational speed deviation revises theacceleration to assign the curve the method. For example in is awayfrom the even level spot some as soon as to be away from L place, thespeed should reduce to Vm/s, but the actual rotational speed is highis V ' m/s, then explained adds the system turns is apart frominsufficiently, after therefore calculates the here to assign reducesspeed value -ag, causes it to add on a negative deviation againepsilon, even if the here reduces the speed given value to revise for- (ag+ epsilon) causes to assign reduces the speed and the true speednegative deviation enlarges, thus enlarged the system to turn thedistance, caused the speed very quickly to fall to the standard value,when electric motor’s rotational speed reduces to 120r/min after, this time thetheater box above the level only had several centimeters, The elevatorrunning rate is very low, for did not prevent phenomenon appearancewhich stops to the even level area, enables the elevator comparativelyquickly to enter the even level area, uses the proportional control inthis section, and uses the time optimization control, guaranteed theelevator accurately promptly enters the even level area, achieves theaccurate reliable even level.4.2 elevators controls constitutionBecause the elevator movement is according to the floor and the theater box calling signal, the travelling schedule signalcarries on the control, but the floor and the theater box call isstochastic, therefore, the systems control uses the stochastic logicalcontrol. Namely in realizes in the elevator basic control requestfoundation by the smooth logic control, according to stochastic inputsignal, as well as elevator corresponding condition at the rightmoment control elevator movement. Moreover, the theater boxposition is determined by the pulse encoder pulse number that, anddelivers PLC the counter to carry on the control. At the same time,each building establishes to approach the switch to use in to examinethe system the floor signal. In order to be advantageous for the observation, is at the floor tothe elevator movement direction as well as the elevator to carry onthe demonstration, uses LED and the photo tube demonstrated, but tothe floor and the theater box calling signal to the indicating lampdemonstrated (on switch has indicating lamp).In order to enhance the elevator the operating efficiency peacefullevel precision, the system requests PLC to be able to theater boxCanada, to decelerate as well as to apply the brake to carry on theeffective control. Realizes according to the theater box physicallocation as well as the exchange velocity modulation system controlalgorithm. For the elevator movement security, the system shouldestablish the reliable fail safe and the corresponding es the PLC realization the elevator control system to constitute byfollowing several main parts.4.2.1 PLC control circuit; PLC receives shouts the ladder from thepanel board and each level to summon the signal, the theater boxand the gate system function signal as well as the well and thefrequency changer condition signal, realizes the elevator collectionafter the procedure judgement and the operation to choose the control.PLC during the output demonstration and supervisory signal, sends outthe movement direction, the start, Canada to the frequencychanger/decelerates moves and applies the brake to stop the ladderequisignal.4.2.2 electric currents, speed double closed loops electric circuit;Frequency changer itself is equipped with the electric currentdetector set, from this constitution electric current closed loop;Through revolves the encoder with the electricalmachinery coaxialjoint, produces a, the b two pulses enters the frequency changer,during confirmation direction, counts the constitution speed closedloop using the pulse.4.2.3 displacements control circuit; The elevator took one kindcarries the person tool, reigns under the potential state of loading,besides request safe reliable, but also requests the movement to besteady, rides comfortably, anchors accurately. Uses the frequencyconversion to modulate velocity Shuanghuan to control may basicallyanswer the purpose, the use existing revolves the encoder toconstitute the speed ring at the same time, moves the proportionthrough the frequency changer PG card output and the electricalmachinery speed and the elevator the pulse number, introduces it PLChigh-speed counting to input the port, through the accumulation pulsenumber, (1) calculates the pulse equivalent after the type, from thisdefinite elevator position. Elevator displacement H=SI In the formula I - accumulation pulse number; S - pulse equivalent; S = plD/(pr) (1) L – Proportion of decelerates ; D - tows the wheel diameter; P - revolves the encoder every time to transfer corresponding thepulse number; R - PG card frequency division ratio.4.2.4 ends stations protection; When in elevator direction detectionline, on the good directional relay, the express train assistancecontact device, the express train movement contact device, the doorlock relay, on the good contact device electricity attracts gathers, mechanical floodgate opens, on elevator line. When the theater box bumps intoforces speed changeing the switch, the PLC internal lock saves the relay toresult in the electricity to attract gathers, timer Tim10, Tim11 startfixed time, it fixed time time length visible end station leveldistance with ladder fast hypothesis. After on forces speed changing theswitch movement, the elevator transfers the slow train movement by theexpress train movement, in the normal condition, the previous line ofeven strata time elevator should stop. If the theater box has notstopped continues the line, when Tim10 supposes the definite value toreduce the zero hour, it the separation, the slow traincontact device and on the good contact device loses the electricity,the elevator stops moving. Bumps into after the arrogant theater boxon forces speed changing the switch, because certain reason elevators have notbeen able to transfer the slow train movement, and the express trainmovement contactdevice has not been able to release, when Tim11supposes the definite value to reduce the zero hour, it N.C. contactthe separation, the express train movement contact device and on thegood contact device loses the electricity, the elevator stops moving.Therefore, no matter is the slow train movement or the express trainmovement, so long as on forces speed changing the switch to send out thesignal, no matter the end stands other protection switches whetheract, can cause the elevator with the aid of Tim10 and Tim11 to stopmoving, thus causes the elevator end station protection to be morereliable.Under when the elevator needs the line, so long as had has chosen theladder instruction, got down the good directional relay to result inelectricity its Chang Kaidian closed, the lock saved the relay toreposition, Tim10 and Tim11 lost the electricity, it N.C. contactclosed for the elevator normal under line has prepared for. The lowerextremity stands the protection principle and the upper extremestation protection similar no longer duplicates.4.2.5 floors count; The floor counts uses relatively counts the way.Before the movement through from the study way, determines thecorresponding floor highly pulse number, corresponds 17 elevatorsseparately to store 16 memories units DM06 ~ DM21. The floor counter(CNT46) is a bidirectional counter, when arrives each level the floorcounts, according to moves the direction to carry on adds 1 or reduces1 to count. In the movement, the high speed counter tiredly estimates the valuereal-time counts the point correspondence pulse number with the floorto carry on the comparison, is equal when sends out the floor to countthe signal, the previous line of Canada 1, the next line reduces 1. Inorder to prevent the counter in counts the pulse high level periodrepetition to count, uses the floor to count on the signal along totrigger the floor counter.4.2.6 is fast speed changing; When the high speed counter value and the fastspeed changing point correspondence pulse number is equal, if the elevator isin the quick operating also this level has chooses the level signal,sends the fast speed changing signal. If the elevator medium speed movement oralthough the quick operating but this not chooses the level signal,then does not send speed changing the signal.4.2.7 areas signals; When high speed counter CNT47 value correspondsin the pulse number scope when the gate area, sends the gate areasignal.4.2.8 pulses signals failure detection; Pulse signal accurategathering and the transmission appears in the system especiallyimportantly, revolves the encoder for the examination and the pulsetransmission circuit breakdown, whether there is has designed thepulse signal and the errors and omissions pulse examination electriccircuit, guarantees the system normal operation through the real-timeexamination. In order to eliminate the pulse to count the accumulativeerror, in base station the establishment reset switch, turns on PLC highspeed counter CNT47 the replacement end.5. Software design characteristic5.1 uses the priority formationPosition and movement direction locates which according to theelevator, in the programming, has used four priorities formations,namely on good priority formation, on line of inferior priorityformation, under good priority formation, next line of inferiorpriority formation. When among them, on good priority formation forelevator upward movement, locates the upward movement calling signalin the elevator which above the position the floor sends out, thearray which should call which the signal cabin correspondence thefloor to have the pulse number depositing register constitutes. Whenprevious line of inferior priority formation for elevator upwardmovement, locates the upward movement calling signal in the elevatorwhich below the position the floor sends out, the formation whichshould call which the signal cabin correspondence the floor to havethe pulse number depositing register constitutes. Control system inelevator movement real-time arrangement four priorities exhibition,has provided the foundation for the realization stochastic logiccontrol.5.2 uses advanced first leaves the formationAccording to elevator movement direction, with to the priorityformation's in non-vanishing unit (has when call this unit is 70units, does not have when call then this unit for zero) (advancedsends in the register formation first to leave formation FIFO), theuse advanced first leaves the read-out instruction SFRDP instruction,sends in the FIFO first unit in data compares the register.5.3 uses the stochastic logical controlWhen the elevator approaches by some movement direction somefloor decelerates the position, distinguished whether this floor doeshave with to the calling signal (on a line of call symbolizedregister, next line of call symbolized when register, has callrequest, corresponding register is l, otherwise is 0), if has, thecorresponding register pulse number and the comparison register willcarry on the comparison, if will be same, then will decelerate in thisfloor stops: If is not same, then sends in this register data comparesthe register, and the original comparison register data preservation,carries out this floor to decelerate stops. After this movementfinished, the data which will preserve reis sent in compares theregister, will realize the stochastic logical control.5.4 uses the software demonstration The system use travelling schedule judgement floor, andtransforms the BCD code output, through hardware connection electriccircuit by LED demonstration.5.5 pair of frequency changers control PLC acts according to the stochastic logical control therequest, may send out to the frequency changer to the movement, thereverse movement, is decelerating as well as applies the brake thesignal, again controls the electrical machinery by the frequencychanger basis certain control rule and the control algorithm. At thesame time, when the system appears the breakdown, PLC to the frequencychanger sends out the signal.6. Concluding remark Uses elevator control system which the MIC340 elevatorspecial-purpose frequency changer constitutes, may realize theintellectualization which the elevator controls, but because theperiod of five days ladder and the elevator in person arrives eachlevel the population is the intelligent elevator is unable todetermine, even if uses the AITP artificial intelligence system, thetransmission transportation passenger flow information also is fuzzy,for solves the elevator this vertical transportation control systemtwo to be big cannot know the factor, will need us to go to theunceasing research and the exploration in the next work.译文:文中分析了电梯的负载特性,阐述了采用梯形加速曲线的电梯理想速度曲线,结合变频器和PLC的性能,论述了电梯控制系统的构成和工作特性。
【机械类文献翻译】PLC控制下的电梯系统

机械专业中英文文献翻译Elevator System Based on PLCComposed by the order of relay control system is a realization of the first elevator control method. However, to enter the nineties, with the development of science and technology and the widespread application of computer technology, the safety of elevators, reliability of the increasingly high demand on the relay control weaknesses are becoming evident.Elevator control system relays the failure rate high, greatly reduces the reliability and safety of elevators, and escalators stopped often to take with the staff about the inconvenience and fear. And the event rather than taking the lift or squat at the end of the lift will not only cause damage to mechanical components, but also personal accident may occur.Programmable Logic Controller (PLC) is the first order logic control in accordance with the needs of developed specifically for industrial environment applications to operate the electronic digital computing device. Given its advantages, at present, the relay control the lift has been gradually replaced by PLC control. At the same time, AC variable frequency motor speed control technology, the way the lift drag speed has been a gradual transition from DC to AC frequency converter. Thus, PLC control technology increases VVVF Elevator modern technology has become a hot industry.1. PLC elevator control advantages(1) used in elevator control PLC, with software for automatic control of liftoperation, reliability greatly increased.(2) layer was removed and a majority of the relay, the control system structure issimple, to simplify the external circuit.(3) PLC can be a variety of complex control system, easy to add or changecontrol functions.(4) PLC can be automated fault detection and alarm display to improve theoperation of security and ease of maintenance.(5) for the group control the allocation and management, and improve theefficiency of elevator operation.(6) do not need to change the control scheme changes when the hardware connection.2. VVVF elevator control characteristicsWith the power electronics, microelectronics and computer technology to control the rapid development of technology, communication technology VVVF also a very rapid rate. AC variable frequency motor speed control technology is the power to improve the process in order to improve product quality and improving the environment and promoting technological progress as a primary means. Frequency of its excellent performance and the speed brake from a smooth performance, high efficiency, high power factor and power-saving effect of a broad scope of application and many other advantages of being at home and abroad recognized as the most promising approach speedExchange characteristics of VVVF Elevator(1)low energy consumption(2) low load circuit, the required emergency power supply device of smallIn the acceleration stage, the required start-up current of less than 2.5 times the rated current. Peak starting current and time is short. Since the starting current is drastically reduced, so power consumption and power supply cable diameter can be reduced a lot. Required for emergency power supply devices are also relatively small size.(3) high reliability and long service life.(4) good comfortElevator operation is best to follow the speed curve of a given operation. Their characteristics can be adapted to human feelings, and to ensure that noise operation, smooth brakePing layer and high precision(5) Stable noise-free(6) In the car, the engine room and adjacent areas to ensure that noise. Because their systems use a high clock frequency. Always produce a true sine wave power supply current yet. Motor torque ripple does not appear. Therefore, to eliminate vibration and noise.3. Elevator control technologyThe so-called elevator control technology refers to the elevator drive system and electrical control system of automatic control. 70 as the 20th century in China's elevator was marked by the exchange of two-speed elevator. Its speed is used to change the elevator traction motor of the very few, two or multi-level approach to the number of windings, very few of them as high-speed winding of the winding, a very few number of windings as the low-speed winding. Windings for high-speedelevator-speed start-up and running, low-speed windings for braking and the maintenance of elevators.The early 80s, VVVF inverter controlled variable lift system available. It uses AC motor drives, are able to reach the level of DC motor, control the speed of the current has reached 6 m / sec. Its small size, light weight, high efficiency, energy saving, including the past almost all the advantages of the lift. Is the latest elevator drive system.Operation in vertical lift, there is also the starting point of the terminus station. For more than three-story elevator buildings, the starting point of the terminal stations and stops between the had not, the starting point for these stations at the first floor of the terminal located at the highest floor. Starting point in the first floor of the station known as base stations, known as the starting point at both ends of the terminal stations and stations at both ends of intermediate stops between stations.Outside the station has a call box, box set are used by staff for elevator call button or touch the call button, the general ends of the lift stations in the call box on the Settings button or touch of a button. Middle layer of the station set up the call box button or touch button 2. No drivers for the control of elevators, at various stations are set up calls me on a button or touch button. Elevator car and the internal settings (except for debris elevator) to manipulate me. Control box switch on the handle or set up stations and the corresponding layer of buttons or touch-button control box on the touch-control button or command button or touch the city button. Outside the command button or touch-button issue as the signal outside the command signal, within the command button or touch-button issue within the signal as a command signal. 80 In the mid-20th century, the touch button has been replaced by micro-button.As the elevator call box outside the base station, in addition to set up a call button or touch button, but also set a key switch in order to work the elevator clearance. Drivers or management staff to open the elevator to the base station can wriggle through a dedicated key to the key switch. Close the elevator in place to automatically cut off the elevator control power supply or power supply.4. PLC Control Elevator DesignWith the continuous development of urban construction, the increasing high-rise buildings, elevators and life in the national economy has a broad application. Elevator high-rise buildings as a means of transport in the vertical run of daily life has beeninextricably linked with people. In fact the lift is based on external call control signals, as well as the laws of their own, such as running, and the call is random, the lift is actually a man-machine interactive control system, simple to use control or logic control order can not meet the control requirements, and therefore , elevator control system uses a random control logic. Elevator control is currently generally used in two ways, first, the use of computer as a signal control unit, the completion of the lift signal acquisition, operation and function of the set, to achieve the lift and set the automatic scheduling function to run the election, drag the control from inverter to complete; the second control mode with programmable logic controller (PLC) to replace the computer control signal sets the election. From the control and performance, these two types of methods and there is no significant difference. Most of the domestic manufacturers to choose the second approach, because the smaller scale of production, their design and manufacture of high cost of computer control devices; and PLC high reliability, convenient and flexible program design, anti-interference ability, stable and reliable operation of the characteristics of Therefore, the elevator control system is now widely used to realize programmable controller.5. Elevator control system characteristicsOperation of the lift curve is above the start to run comfort indicators lift the key features, and comfort are directly related with the acceleration, according to control theory, for a certain amount of change according to the law must be directly controlled, for elevator control system, according to the ideal acceleration curve acceleration feedback to be used, in accordance with the motor torque equation: M-MZ = ΔM = J (dn / dt), can be seen reflected in the rate of change of acceleration of the system of dynamic torque changes on the control system to control the acceleration of the dynamic torque ΔM = M-MZ. Therefore, during this time to control the use of the principle of acceleration, when the start rate of increase in steady-state value above 90%, the acceleration control system by the switch to speed control, as in paragraph steady speed, speed control for the constant fluctuations in the smaller, little change in acceleration, speed and the use of closed-loop control can maintain a steady-state speed accuracy and precision for the braking section to create the conditions ping layer. Is rising at a rate in the system, and although the above-speed PI regulator used to control, but two of the PI parameters are different in order to improve the system dynamic response indicators. The brake in the system,that is, to reduce the speed of control necessary to ensure the comfort, but also strictly in accordance with the operation of the lift of the relationship between speed and distance control to ensure the accuracy of flat layers. To the speed in the system before 120r/min, in order to take into account both be taken to control the acceleration of time-based and at the same time in each braking distance based on actual speed and speed deviations from the theory to fix the acceleration curve of a given method. For example, from a flat layer at the distance L, the speed should be reduced to Vm / s, while the actual high speed V'm / s, is illustrated by the increase in the braking torque is not enough here, therefore to calculate value determined by the speed-ag after it combined with a negative deviation of ε, even here the value given by the speed of amended - (ag + ε) so that a given rate of deceleration and the actual increase of negative bias, which increases braking torque big, so fast down to the standard value, when the motor speed 120r/min down after the car at this time only a dozen or so cm layer anomaly, low speed lift, in order to prevent yet floor parking area on the phenomenon in order to enable faster access to the lift to floor area ratio adjustment used in this paragraph and the use of optimal control of time in order to ensure accurate and timely access to elevator floor area, in order to achieve accurate and reliable level layer.PLC控制下的电梯系统由继电器组成的顺序控制系统是最早的一种实现电梯控制的方法。
基于PLC的电梯控制系统的设计英文文献

Design and Practice of an Elevator Control System Based on PLC Xiaoling Yang1, 2, Qunxiong Zhu1, Hong Xu11College of Information Science &Technology,Beijing University of Chemical Technology, Beijing 100029, China2 Automation College of Beijing Union University,Beijing,100101, Chinayxl_lmy@ , zhuqx@,AbstractThis paper describes the development of 2 nine-storey elevators control system for a residential building. The control system adopts PLC as controller, and uses a parallel connection dispatching rule based on "minimum waiting time" to run 2 elevators in parallel mode. The paper gives the basic structure, control principle and realization method of the PLC control system in detail. It also presents the ladder diagram of the key aspects of the system. The system has simple peripheral circuit and the operation result showed that it enhanced the reliability and performance of the elevators.1. IntroductionWith the development of architecture technology, the building is taller and taller and elevators become important vertical transportation vehicles in high-rise buildings. They are responsible to transport passengers, living, working or visiting in the building, comfortable and efficiently to their destinations. So the elevator control system is essential in the smooth and safe operation of each elevator. It tells the elevator in what order to stop at floors, when to open or close the door and if there is a safety-critical issue.The traditional electrical control system of elevators is a relay-controlled system. It has the disadvantages such as complicated circuits, high fault ratio and poor dependability; and greatly affects the elevator’s running quality. Therefore, entrusted by an enterprise, we have improved electrical control system of a relay-controlled elevator in a residential building by using PLC. The result showed that the reformed system is reliable in operation and easy for maintenance.This paper introduces the basic structure, control principle and realization method of the elevator PLC control system in detail.2. System structureThe purpose of the elevator control system is to manage movement of an elevator in response to user’s requests. It is mainly composed of 2 parts:2.1. Electric power driving systemThe electric power driving system includes: the elevator car, the traction motor, door motor, brake mechanism and relevant switch circuits.Here we adopted a new type of LC series AC contactors to replace the old ones, and used PLC’s contacts to substitute the plenty of intermediate relays. The circuits of traction motor are reserved. Thus the original control cabinet’s disadvantages, such as big volume and high noise are overcome efficiently.2.2. Signal control systemThe elevator’s control signals are mostly realized by PLC. The input signals are: operation modes, operation control signals, car-calls, hall-calls, safety/protect signals, door open/close signal and leveling signal, etc. All control functions of the elevator system are realized by PLC program, such as registration, display and elimination of hall-calls or car-calls, position judgment of elevator car, choose layer and direction selection of the elevator, etc. The PLC signal control system diagram of elevator is showed in Figure 1.Figure 1 PLC signal control system diagram2.3. RequirementsThe goal of the development of the control system is to control 2 elevators in a 9-storey residential building.For each elevator, there is a sensor located at every floor. We can use these sensors to locate the current2008 Workshop on Power Electronics and Intelligent Transportation Systemposition of the elevator car. The elevator car door can be opened and closed by a door motor. There are 2 sensors on the door that can inform the control system about the door’s position. There is another sensor on the door can detect objects when the door is closing. The elevator car’s up or down movement is controlled by a traction motor.Every floor, except the first and the top floor, has a pair of direction lamps indicating that the elevator is moving up or down.Every floor, has a seven segment LED to display the current location of the elevator car.The first step for the development of the elevator control is to define the basic requirements. Informally, the elevators behavior is defined as follows.(1) Running with a single elevatorGenerally, an elevator has three operation states: normal mode, fire-protection mode and maintenance mode. The maintenance mode has the highest priority. Only the maintenance mode is canceled can the other operation modes be implemented. The next is fire-protection mode, the elevator must return to the bottom floor or base station immediately when the fire switch acts. The elevator should turn to normal operation mode when the fire switch is reset. Under normal operation mode, the control system’s basic task is to command each elevator to move up or down, to stop or start and to open and close the door. But is has some constraints as follows:Each elevator has a set of 9 buttons on the car control panel, one for each floor. These buttons illuminate when they are pressed and cause the elevator to visit the corresponding floor. The illumination is canceled when the corresponding floor is visited by the elevator.Each floor, except the first and the top floor, has two buttons on the floor control panel, one to request an up- elevator, one to request a down-elevator. These buttons illuminate when they are pressed. The illumination is canceled when an elevator visits the floor, then moves in the desired direction.The buttons on the car control panel or the floor control panel are used to control the elevator’s motion.The elevator cannot pass a floor if a passenger wants to get off there.The elevator cannot stop at a floor unless someone wants to get off there.The elevator cannot change direction until it has served all onboard passengers traveling in the current direction, and a hall call cannot be served by a car going in the reverse direction.If an elevator has no requests, it remains at its current floor with its doors closed.(2) Parallel running with two elevatorsIn this situation, there are two elevators to serve the building simultaneously. It runs at 7am to 9am and 5pm to 7pm every day.When an elevator reaches a level, it will test if the stopis required or not. It will stop at this level when the stop is required.At the same time, to balance the number of stops, theoperation of two elevators will follow a certain dispatching principle.An elevator doesn’t stop at a floor if another car isalready stopping, or has been stopped there.The normal operation of elevators is implemented by cooperation of its electric power driving system and logiccontrol system.3. Software designDue to the random nature of call time, call locationsand the destination of passengers, the elevator controlsystem is a typical real-time, random logic control system.Here we adopted collective selective control method withsiemens PLC S7-200 CPU226 and its extension modules.There are 46 input points and 46 output points in thesystem. The I/O points are showed in Table1 and Table 2.Table 1 Input pointsdescription address 1-8 floor up hall-call I0.0-I0.72-9 floor down hall-call I1.0-I1.71-9 floor car-call I2.0-I2.7, I3.01-9 arrival sensor I3.1-I3.7, I4.0-I4.1door open button I4.2door close button I4.3door close location switch I4.4door open location switch I4.5up leveling sensor I4.6down leveling sensor I4.7fire switch I5.0driver operation switch I5.1touch panel switch of car door I5.2overload I5.3Forced speed changing switch I5.4full load I5.5Table 2 Output pointsdescription address 1-8 floor up hall-call lamp Q0.0-Q0.72-9 floor down hall-call lamp Q1.0-Q1.71-9 floor car-call lamp Q2.0-Q2.7, Q3.0up moving lamp Q3.1down moving lamp Q3.2Seven segment LED display ofelevator’s positionQ3.3-Q3.7Q4.0-4.1door opening Q4.2door closing Q4.3up moving Q4.4down moving Q4.5full load lamp Q4.6high speed operation Q4.7low speed operation Q5.0acceleration of starting Q5.1deceleration of braking Q5.2-Q5.4alarm beeper Q5.5About software designing, we adopt the modularizedmethod to write ladder diagram programs.The information transmission between modules is achieved by intermediate register bit of PLC.The whole program is mainly composed of10 modules:hall-call registration and display module, car-callregistration and display module, the signal combinationmodule,the hall-call cancel module, the elevator-locationdisplay module, the floor selection module, the movingdirection control module, the door open/close module, themaintenance operation module and the dispatchingmodule under parallel running mode.The design of the typical modules is described as follows:3.1. Hall-call registration and displayThere are two kinds of calls in an elevator: hall-calland car-call. When someone presses a button on the floorcontrol panel, the signal will be registered and thecorresponding lamp will illuminate. This is calledhall-call registration.When a passenger presses a button in the elevator car,the signal will be registered and with the correspondinglamp illuminated. This is called car-call registration.Figure2 shows the ladder diagram of up hall-callsregistration and display. The self-lock principle is used toguarantee the calls’ continuous display.Figure 2 up hall-call registration and display3.2. The collective selection of the callsHere the collective selection control rules are used. Asshowed in Figure3, M5.1-M5.7, M6.0 and M6.1 areauxiliary relays in PLC. They denote the stopping requestsignal of 1st to 9th floor respectively. The auxiliary relayM6.2 denotes the elevator driver’s operation signal. Whenthere is a call in a certain floor, the stopping signal ofcorresponding floor will output. When the elevator isoperated by the driver, the hall-calls will not be served.And the elevator cannot pass a floor at which a passengerwishes to alight.3.3. The cancellation of the callsThe program of this module can make the elevatorresponse the hall-calls which have the same direction asthe car’s current direction, and when a hall-call is served,its registration will be canceled. The ladder diagram of uphall-calls’ cancellation is showed in Figure4.Figure 3 The combination of the callsFigure 4 The cancellation of up callsIn Figure4, the auxiliary relay M4.0 is the up movingflag of the elevator. When the current direction of theelevator is up, M4.0’s contacts are closed; on the contrary,when the current direction of the elevator is down, M4.0’scontacts are opened. M0.1 to M0.7 denotes the car-calls’stopping request signal of floor 2 to floor 8 respectively.This program has two functions:(1) Make the elevator response the normal downhall-calls when it is moving down, and when a downhall-call is served, its registration is canceled.(2) When the elevator is moving up, the correspondingfloor’s down hall-call it passing by is not served and theregistration is remained.The cancellation of down hall-calls is reversed with up hall-calls.3.4. Elevator’s directionThe elevator may be moving up or down, depending on the combination of hall-calls and car-calls. The following ladder diagram in Fig.5 illustrates that the elevator will move up.Figure 5 Up moving of the elevatorFigure5 shows that when the calls corresponding floor is higher than the elevator’s current location, the elevator will go up. Here the auxiliary relay M4.0 is used as the up-moving flag. When the elevator is moving up, the up-moving lamp is illuminated, so the M4.0 is connected on. When the elevator arrives the top floor, the up-moving lamp is off and the timer starts. After 0.2s, the M4.0 is disconnected, the up-moving display is off. Here we used M4.0 to replace Q3.1 which can ensure the cancellation’s reliability.3.5. Elevator’s floor-stoppingFigure6 shows the ladder diagram of the elevator’s floor-stopping function.As showed in Figure6, M6.4 is the flag of floor-stopping signal. M6.6 is the floor-stopping signal sent by the driver. M7.0 is the fire signal sent by the fire switch. And M6.7 is the forced speed changing signal. When either of these contacts act, the system should send out the floor-stopping signal.4. Minimum waiting time algorithmIn traffic of elevator systems, there are two types of control task usually. The one is the basic control function to command each elevator to move up or down, to stop or start and to open and close the door. The other is the control of a group of elevators.The main requirements of a group control system in serving both, car and hall calls, should be: to provide even service to every floor in a building; to minimize the time spent by passengers waiting for service; to minimize the time spent by passengers to move from one floor to another; to serve as many passengers as possible in a given time[1].Figure 6 The elevator’s floor-stoppingThere are many dispatching algorithms for elevator’s group control. Such as Nearest-neighbor Algorithm[2], which the elevator always serve the closet request next; Zoning Algorithm[3] which by analyzing the traffic of elevator system with unequal floor and population demand to dispatch the elevator; and Odd-even rule, which an elevator only serves the odd floor and the other only serves the even floor.The Nearest-neighbor Algorithm minimizes the length of the elevator’s empty move to the next request. it usually has very small average waiting times, but individual waiting times can become quite large[2]. The Zoning Algorithm usually used in buildings which has heavy traffic situations, such as the office building at lunch time.Compared to the office building and shopping mall, the traffic flow of residential buildings is relatively lowand even in every floor. Secondly, people usually think of elevators as purely functional objects and the experience of riding an elevator is time waited for most of them. Furthermore, there exist immense problems when attempting to satisfy all requirements.Considering all of the reasons above, we adopted the “minimum waiting time” algorithm to realize the 2 elevators’ parallel running[4].4.1. Evaluation functionThe goal of the “minimum waiting time” algorithm is to predict the each elevator’s response time according to all calls, and select the elevator which has the shortest response time to serve.When there is a call, the system calculates out the function values of each elevator according the evaluation function showed in (1) and (2):J(*)=Min[J(1),J(2),…,J(n)] (1)J(i)=T r(i)+KT d(i)+KT o(i) i=1,2,...,n(2)J(i) is the evaluation index of each elevator; T r(i) denotes the time of the elevator directly moving to the destination corresponding the latest call from its current floor; T o(i) denotes the additional acceleration and deceleration time of a floor-stop of the elevator; T d(i) denotes the average time of the passenger boarding and alighting the elevator; and K is the sum of hall-calls and car-calls. But when a hall-call and a car call corresponds the same floor, the K is only calculated one time.4.2. Calculation of minimum waiting timeIn equation (2), K is a certain value, T o and T d can be obtained by means of statistics. T r = T*L, where T denotes the average time of the elevator passing by one floor; L denotes the desired floors of the elevator from current floor to the hall-call floor.In order to calculate the L value, we defined the 2 elevators are A and B respectively; Y A,Y B denotes the current floor of elevator A and B respectively. H is the corresponding key value when a hall-call button is pressed, and H=floor number of the hall-call.We defined 4 tables for the PLC realization: up hall-call registration table, down hall-call registration table, car-call registration table of A and car-call registration table of B. When a certain call button is pressed, its floor value is recorded in corresponding table.Here we take elevator A as an example. First, define the variable M A, M B and M W. Where M A, M B denotes the extreme value of car-calls with same direction of A or B’s movement respectively.When elevator A is up-moving, set M A is equal to the maximum value in car-call registration table A; when elevator A is down-moving, set M A is equal to the minimum value in car-call registration table A.M W denotes the extreme value of hall-calls with same direction of A’s movement.When elevator A is up-moving and up-hall-call value≥Y A, set M W=0; otherwise, set M W is equal to the minimum value in up-hall-call registration table A. When elevator A is down-moving and up-hall-call value≤Y A, set M W=0; otherwise, set M W is equal to the maximum value in down-hall-call registration table A .Thus, we can determine the L value according to Y A, H, M A and M W. There are 3 situations:(1) When the hall-call’s direction is opposite to elevator A’s movement:L=|Y A-M A|+|M A-H| (3)(2) When the hall-call’s direction is same as elevator A’s movement and it is in the front of elevator A:L=|Y A-H| (4)(3) When the hall-call’s direction is same as the elevator A’s movement and it is in the back of elevator A: L=|Y A-M A |+|M A-M W|+|H-M W| (5)So the i-th floor’s minimum waiting time can be calculated by (6) as follows:Time(i)=TL(i)+KT d(i)+KT o(i) i=1,2,...,n(6)When the calls change during the operation of elevators, the system calculates the minimum waiting time of each elevator. Then it allocates the current call to the elevator which has small value. When the each elevator has the same value, then the current call is prior to elevator A.When an elevator is wrong or not in service, the system can exit the dispatching algorithm and turns to a single elevator running mode.4.3. Algorithm realizationCompared with single elevator running mode, the parallel running mode is mainly different at the processing method about hall-calls. The former uses collective selective control method, and the latter uses dispatch rule combined with collective selective control method.Here the system is to control a 9-storey building, so we choose two Siemens S7-200 PLCs(CPU226) and its Extensive Modules to control the single elevator respectively. And by using PPI Protocol to realize the communication between 2 PLCs.The PPI Protocol adopts master-slave communication mode, so we defined elevator A as the master and elevator B as the slave. By communication program, the 2 PLCs can exchange the massage such as the current position, hall-calls or car-calls and moving direction. Then by using “minimum waiting time” algorithm, the system realizes the optimal operation of 2 elevators.Figure7 shows the ladder program of the car-calls extreme value calculation of elevator A.In Figure7, VB121~VB130 is the register address of elevator A’s car-call corresponding to each floor, Q3.1 isthe up-moving lamp of elevator A , and the car-calls extreme value is saved in VB120.Figure 7 The car-calls extreme value calculationof elevator A5. ConclusionsIn this paper, we have improved an old elevator control system by using PLC, and realized the group control of 2 elevators. The new control system has been operated for 1 year, and its operation scenarios are as follows: (1) Down–PeakThis traffic condition concerns people out of the building in the morning between 7am to 9am. (2) Up–PeakThis condition concerns people entering the building between 5pm to 7pm. (3) OtherIt covers the day from 6:00 to 0:00 except the two situations above. And in this situation, there is only one elevator running.The results are expressed via an average waiting time and maximum waiting time(both given in seconds) are collected in Tables 3 and 4.Table 3Average and maximum waiting time(before reformed)Average Maximum Down–peak 63.20 240.33 Up–peak 52.78 235.26 Other 43.25 215.43Table 4Average and maximum waiting time(reformed)Average Maximum Down–peak 30.12 203.33 Up–peak 27.81 195.20 Other 37.32 186.43Due to the nonparallel running before the reform, so the average waiting time and maximum waiting time of down–peak and the up–peak are very longer than the reformed. The practice results have showed the better performance of the improved control system.References[1] Ricardo Gudwin, Fernando Gomide, Marcio (1998). “AFuzzy Elevator Group Controller With Linear Context Adaptation”. IEEE World Congress on Computational Intelligence . Vol. 12, No. 5, pp.481-486.[2] Philipp Friese, Jorg Rambau (2006). “Online-optimizationof multi-elevator transport systems with reoptimization algorithms based on set-partitioning models”. Discrete Applied Mathematics .No. 154, pp.1908-1931.[3] Zheng Yanjun, Zhang Huiqiao, Ye Qingtai, ZhuChangming. (2001). “The Research on Elevator Dynamic Zoning Algorithm and It's Genetic Evolution”. Computer Engineering and Applications , No. 22, pp.58-61.[4] Xiaodong Zhu, Qingshan Zeng (2006). “A Elevator GroupControl Algorithm for Minimum Waiting Time Based On PLC”. Journal of Hoisting and Conveying Machiner , No. 6, pp.38-40。
PLC控制系统外文翻译

附录Abstract: Programmable controller in the field of industrial control applications, and PLC in the application process, to ensure normal operation should be noted that a series of questions, and give some reasonable suggestions.Key words: PLC Industrial Control Interference Wiring Ground Proposal DescriptionOver the years, programmable logic controller (hereinafter referred to as PLC) from its production to the present, to achieve a connection to the storage logical leap of logic; its function from weak to strong, to achieve a logic control to digital control of progress; its applications from small to large, simple controls to achieve a single device to qualified motion control, process control and distributed control across the various tasks. PLC today in dealing with analog, digital computing, human-machine interface and the network have been a substantial increase in the capacity to become the mainstream of the field of control of industrial control equipment, in all walks of life playing an increasingly important role.ⅡPLC application areasCurrently, PLC has been widely used in domestic and foreign steel, petroleum, chemical, power, building materials, machinery manufacturing, automobile, textile, transportation, environmental and cultural entertainment and other industries, the use of mainly divided into the following categories:1. Binary logic controlReplace traditional relay circuit, logic control, sequential control, can be used to control a single device can also be used for multi-cluster control and automation lines. Such as injection molding machine, printing machine, stapler machine, lathe, grinding machines, packaging lines, plating lines and so on.2. Industrial Process ControlIn the industrial production process, there are some, such as temperature, pressure, flow, level and speed, the amount of continuous change (ie, analog), PLC using the appropriate A / D and D / A converter module, and a variety of control algorithm program to handle analog, complete closed-loop control. PID closed loop control system adjustment is generally used as a conditioning method was more. Process control in metallurgy, chemical industry, heat treatment, boiler control and so forth have a very wide range of applications3. Motion ControlPLC can be used in a circular motion or linear motion control. Generally use a dedicated motion control module, for example a stepper motor or servo motor driven single-axis or multi-axis position control module, used in a variety of machinery, machine tools, robots, elevators and other occasions.4. Data ProcessingPLC with mathematics (including matrix operations, functions, operation, logic operation), data transfer, data conversion, sorting, look-up table, bit manipulation functions, you can complete the data collection, analysis and processing. Dataprocessing is generally used, such as paper making, metallurgy, food industry, some of the major control system5. Communications and networkingPLC communication with the communication between PLC and the PLC and other communications between intelligent devices. Along with the development of factory automation network, the PLC now has communication interface, communication is very convenient.ⅢApplication features of PLC1. High reliability, strong anti-interferenceHigh reliability is the key to performance of electrical control equipment. PLC as the use of modern large scale integrated circuit technology, using the strict production process, the internal circuits to the advanced anti-jamming technology, with high reliability. Constitute a control system using PLC, and the same size compared to relay contactor system, electrical wiring and switch contacts have been reduced to hundreds or even thousands of times, fault also greatly reduced. In addition, PLC hardware failure with self-detection, failure alarm timely information. In the application software, application are also incorporated into the peripheral device fault diagnosis procedure, the system is in addition to PLC circuits and devices other than the access protection fault diagnosis. In this way, the whole system extremely high reliability.2. Fully furnished, fully functional, applicabilityPLC to today, has formed a series products of various sizes, can be used for occasions of all sizes of industrial control. In addition to processing other than logic, PLC data, most of computing power has improved, can be used for a variety of digital control in the field. A wide variety of functional units in large numbers, so that penetration to the position of PLC control, temperature control, CNC and other industrial control. Enhanced communication capabilities with PLC and human-machine interface technology, using the PLC control system composed of a variety of very easily.3. Easy to learn, well engineering and technical personnel welcomePLC is facing the industrial and mining enterprises in the industrial equipment. It interfaces easily, programming language easily acceptable for engineering and technical personnel. Ladder language, graphic symbols and expressions and relay circuit very close to are not familiar with electronic circuits, computer principles and assembly language do not understand people who engage in industrial control to open the door.4. System design, the workload is small, easy maintenance, easy to transformPLC logic with memory logic instead of wiring, greatly reducing the control equipment external wiring, make the control system design and construction of the much shorter period, while routine maintenance is also easier up, even more important is to change the procedures of the same equipment has been changed production process possible. This is particularly suitable for many varieties, small batch production situations.(1)Installation and wiring●Power lines, control lines and power lines and PLC I / O lines should be split wiring, isolation transformer and PLC and I / O should be used between the cable connection Shuangjiao. The PLC's IO lines and power lines go separate lines, such as to be in the same groove, the separation of bundled communication lines, DC lines, if conditions allow, the best sub-groove alignment, not only will it have the greatest possible distance and can reduce the noise to a minimum.●PLC should stay away from strong interference sources such as welding, high-power silicon rectifier devices and large power equipment, not with the high-voltage electrical switch installed in the same cabinet. PLC in the cabinet should stay away from power lines (the distance between the two should be more than 200mm). And PLC cabinets installed within the same inductive load, such as large power relay, contactor coil, arc should be parallel RC circuit.●PLC input and output separately from the best alignment, switch and analog should be laid separately. The transmission of analog signals should be shielded cable, one end or both ends of the shield should be grounding resistance should be less than the shielding layer 1 / 10.●AC output line and DC output lines do not use the same cable, the output line should be far from power lines and power lines, to avoid parallel.(2)I / O wiring terminalInput Connection●Input wiring generally not too long. But if the environment interfere with small, small voltage drop, the input terminal can be properly longer.●Input / output lines can not be used with a cable, input / output lines should be separated.●The extent possible, normally open contact form to connect to the input in the establishment of the ladder and relay the same schematic, easy to read。
PLC控制系统外文文献翻译、中英文翻译、外文翻译
PLC控制系统一、PLC概述可编程控制器是60年代末在美国首先出现的,当时叫可编程逻辑控制器PLC (Programmable Logic Controller),目的是用来取代继电器。
以执行逻辑判断、计时、计数等顺序控制功能。
提出PLC概念的是美国通用汽车公司。
PLC的基本设计思想是把计算机功能完善、灵活、通用等优点和继电器控制系统的简单易懂、操作方便、价格便宜等优点结合起来,控制器的硬件是标准的、通用的。
根据实际应用对象,将控制内容编成软件写入控制器的用户程序存储器内,使控制器和被控对象连接方便。
70年代中期以后,PLC已广泛地使用微处理器作为中央处理器,输入输出模块和外围电路也都采用了中、大规模甚至超大规模的集成电路,这时的PLC已不再是仅有逻辑(Logic)判断功能,还同时具有数据处理、PID调节和数据通信功能。
国际电工委员会(IEC)颁布的可编程控制器标准草案中对可编程控制器作了如下的定义:可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用了可编程序的存储器,用来在其内部存储执行逻辑运算,顺序控制、定时、计数和算术运算等操作的指令,并通过数字式和模拟式的输入和输出,控制各种类型的机械或生产过程。
可编程控制器及其有关外围设备,易于与工业控制系统联成一个整体,易于扩充其功能的设计。
可编程控制器对用户来说,是一种无触点设备,改变程序即可改变生产工艺。
目前,可编程控制器已成为工厂自动化的强有力工具,得到了广泛的普及推广应用。
可编程控制器是面向用户的专用工业控制计算机,具有许多明显的特点。
①可靠性高,抗干扰能力强;②编程直观、简单;③适应性好;④功能完善,接口功能强二、PLC的历史1968年,Richard E. Morley创造出了新一代工业控制装置可编程逻辑控制器(PLC),现在,PLC已经被广泛应用于工业领域,包括机械制造也、运输系统、化学过程设备、等许多其他领域。
PLC控制系统外文翻译
附录Abstract: Programmable controller in the field of industrial control applications, and PLC in the application process, to ensure normal operation should be noted that a series of questions, and give some reasonable suggestions.Key words: PLC Industrial Control Interference Wiring Ground Proposal DescriptionOver the years, programmable logic controller (hereinafter referred to as PLC) from its production to the present, to achieve a connection to the storage logical leap of logic; its function from weak to strong, to achieve a logic control to digital control of progress; its applications from small to large, simple controls to achieve a single device to qualified motion control, process control and distributed control across the various tasks. PLC today in dealing with analog, digital computing, human-machine interface and the network have been a substantial increase in the capacity to become the mainstream of the field of control of industrial control equipment, in all walks of life playing an increasingly important role.ⅡPLC application areasCurrently, PLC has been widely used in domestic and foreign steel, petroleum, chemical, power, building materials, machinery manufacturing, automobile, textile, transportation, environmental and cultural entertainment and other industries, the use of mainly divided into the following categories:1. Binary logic controlReplace traditional relay circuit, logic control, sequential control, can be used to control a single device can also be used for multi-cluster control and automation lines. Such as injection molding machine, printing machine, stapler machine, lathe, grinding machines, packaging lines, plating lines and so on.2. Industrial Process ControlIn the industrial production process, there are some, such as temperature, pressure, flow, level and speed, the amount of continuous change (ie, analog), PLC using the appropriate A / D and D / A converter module, and a variety of control algorithm program to handle analog, complete closed-loop control. PID closed loop control system adjustment is generally used as a conditioning method was more. Process control in metallurgy, chemical industry, heat treatment, boiler control and so forth have a very wide range of applications3. Motion ControlPLC can be used in a circular motion or linear motion control. Generally use a dedicated motion control module, for example a stepper motor or servo motor driven single-axis or multi-axis position control module, used in a variety of machinery, machine tools, robots, elevators and other occasions.4. Data ProcessingPLC with mathematics (including matrix operations, functions, operation, logic operation), data transfer, data conversion, sorting, look-up table, bit manipulation functions, you can complete the data collection, analysis and processing. Dataprocessing is generally used, such as paper making, metallurgy, food industry, some of the major control system5. Communications and networkingPLC communication with the communication between PLC and the PLC and other communications between intelligent devices. Along with the development of factory automation network, the PLC now has communication interface, communication is very convenient.ⅢApplication features of PLC1. High reliability, strong anti-interferenceHigh reliability is the key to performance of electrical control equipment. PLC as the use of modern large scale integrated circuit technology, using the strict production process, the internal circuits to the advanced anti-jamming technology, with high reliability. Constitute a control system using PLC, and the same size compared to relay contactor system, electrical wiring and switch contacts have been reduced to hundreds or even thousands of times, fault also greatly reduced. In addition, PLC hardware failure with self-detection, failure alarm timely information. In the application software, application are also incorporated into the peripheral device fault diagnosis procedure, the system is in addition to PLC circuits and devices other than the access protection fault diagnosis. In this way, the whole system extremely high reliability.2. Fully furnished, fully functional, applicabilityPLC to today, has formed a series products of various sizes, can be used for occasions of all sizes of industrial control. In addition to processing other than logic, PLC data, most of computing power has improved, can be used for a variety of digital control in the field. A wide variety of functional units in large numbers, so that penetration to the position of PLC control, temperature control, CNC and other industrial control. Enhanced communication capabilities with PLC and human-machine interface technology, using the PLC control system composed of a variety of very easily.3. Easy to learn, well engineering and technical personnel welcomePLC is facing the industrial and mining enterprises in the industrial equipment. It interfaces easily, programming language easily acceptable for engineering and technical personnel. Ladder language, graphic symbols and expressions and relay circuit very close to are not familiar with electronic circuits, computer principles and assembly language do not understand people who engage in industrial control to open the door.4. System design, the workload is small, easy maintenance, easy to transformPLC logic with memory logic instead of wiring, greatly reducing the control equipment external wiring, make the control system design and construction of the much shorter period, while routine maintenance is also easier up, even more important is to change the procedures of the same equipment has been changed production process possible. This is particularly suitable for many varieties, small batch production situations.(1)Installation and wiring●Power lines, control lines and power lines and PLC I / O lines should be split wiring, isolation transformer and PLC and I / O should be used between the cable connection Shuangjiao. The PLC's IO lines and power lines go separate lines, such as to be in the same groove, the separation of bundled communication lines, DC lines, if conditions allow, the best sub-groove alignment, not only will it have the greatest possible distance and can reduce the noise to a minimum.●PLC should stay away from strong interference sources such as welding, high-power silicon rectifier devices and large power equipment, not with the high-voltage electrical switch installed in the same cabinet. PLC in the cabinet should stay away from power lines (the distance between the two should be more than 200mm). And PLC cabinets installed within the same inductive load, such as large power relay, contactor coil, arc should be parallel RC circuit.●PLC input and output separately from the best alignment, switch and analog should be laid separately. The transmission of analog signals should be shielded cable, one end or both ends of the shield should be grounding resistance should be less than the shielding layer 1 / 10.●AC output line and DC output lines do not use the same cable, the output line should be far from power lines and power lines, to avoid parallel.(2)I / O wiring terminalInput Connection●Input wiring generally not too long. But if the environment interfere with small, small voltage drop, the input terminal can be properly longer.●Input / output lines can not be used with a cable, input / output lines should be separated.●The extent possible, normally open contact form to connect to the input in the establishment of the ladder and relay the same schematic, easy to read。
基于PLC的电梯控制系统设计中英文翻译

Elevator System Based on PLCComposed by the order of relay control system is a realization of the first elevator control method。
However, to enter the nineties,with the development of science and technology and the widespread application of computer technology, the safety of elevators,reliability of the increasingly high demand on the relay control weaknesses are becoming evident.Elevator control system relays the failure rate high, greatly reduces the reliability and safety of elevators, and escalators stopped often to take with the staff about the inconvenience and fear。
And the event rather than taking the lift or squat at the end of the lift will not only cause damage to mechanical components, but also personal accident may occur。
Programmable Logic Controller (PLC)is the first order logic control in accordance with the needs of developed specifically for industrial environment applications to operate the electronic digital computing device。
PLC控制系统英文文献+翻译

PLC控制系统英文文献+翻译PLC控制系统英文文献+翻译Beer filling, Gland machine PLC control system 1.Intorduction Malt beer production process is divided into manufacturing, manufacturing wort, before fermentation, after fermentation, filtration sterilization, packaging, and so few procedures. Beer filling, Gland part of a packaging machine processes. The membrane filtration of beer after the pipeline into the rotary Jiugang, then the valve into the bottle of wine, Gland, was bottled beer. Beer filling, Gland machine's efficiency and degree of automation direct impact on the level of beer production.China's beer industry to meet the increasing scale of production and the demand for beer modern high-speed filling machinery filling the requirements of domestic beer manufacturers are actively seeking to transform the unit or the filling of beer production equipment, making it a good use Performance, advanced technology and high production efficiency and operating a safe and secure, low maintenance costs of the modernization of beer filling machine. 2. Filling beer, Gland principle and control aircraft partsLiquid filling machine by filling principle can be divided into atmospheric filler,filling machines and vacuum pressure on the filling machine. Beer filling,Gland-filling method used pressure is higher than the atmospheric pressure under the filling, storage of the cylinder pressure than the pressure of the bottle, beer bottle into the liquid on pressure.Technology at home and abroad to achieve the filling line is basically: The Rotary Jiugang the rotating movement, placed in Jiugang slots on the empty bottles through the machinery will befixed at the upper Jiugang vacuum valve to open, closed Vacuum bottles for good treatment, Bozhuan stem from operating, open the valve of the bottle filling CO2 gases, vacuum convex .Round to open the vacuum valve, the bottle will air mixed with CO2 out of gas, open the valve again, the CO2 gas bottle filling, the filling valve on the pressure valve in the bottle close to back-pressure gas pressure at the open-Jiuye Pingbi into the bottle, through pneumatic or electrical control filling valve to achieve the filling of beer.Today's advanced international beer filling, Gland machine control system mainly by the photoelectric switch position detection part and take the bottles with, Jiugang speed part, dominated by the PLC, touch screen and other components. Filling, Gland of the mechanical structure and PLC programmable control devices, frequency stepless speed regulation, human-computer interface, and other modern means of complete automatic control technology, the combination of a mechanical and electrical integration.3. Controlled part of the programmeMany domestic beer manufacturers are now using the filling, Gland of the control system of uneven degree of automation; button and all the manual switch technology have set up operations in a box on the panel, PLC controller for the majority of Japanese companies or OMRON Mitsubishi's early products, equipment chain of control, less protection settings, plus the beer filling the scene poor environment, humidity, such as contact with the switch contacts serious corrosion, the system's signal detection of the high failure rate, resulting in equipment control system Operation of low reliability, the normal operation of equipment, such as short-cycle phenomenon.To the actual transformation of the Dandong Yalu River Brewery Co., Ltd. of filling, Gland machine control system as an example, the transformation of methods to clarify the control of such equipment thinking and ideas, according to the scene of the actual process conditions, to prepare the operation of the PLC Procedures. For beer filling, Gland control system of the actual situation and in accordance with the actual process conditions at the scene, re-design of the equipment of the PLC control system. This transformation of the same methods and ideas can be applied to other liquids and the transformation of filling equipment. 3.1 system hardware configurationJapan's Mitsubishi Corporation to use the FX2N128MRPLC use the system to replace the original 2-OMRON's C60P PLC, the original system of the PLC is due to old models, and computer on-line communications need to configure special converters, the system need to increase the external I / O input points , The extension of spare parts more difficult to find. FX2N128MRPLC is an integrated 128-point I / O controller of the box, a computing speed, command rich, high-cost performance, on-line programming simple and easy extension of the advantages of the Mitsubishi FX series, features the strongest small controller .(1) by the Mitsubishi 900 series of 970 GOT human-computer touch screen system to replace the original use of the button panel display equipment and monitor the operation of operating parameters. 970GOT HMI for the 16-color high-brightness significantly, through the convergence of connectivity and FX2N128MRPLC directly connected to the CPU, achieving rapid response. Has many maintenance features, such as the list-editing features, ladder monitoring (troubleshooting) function, the system monitoring functions to find fault and maintenanceof PLC Systems.(2) filling, Gland of the frequency converter in the transformation of no replacement, on-site detection signal means-testing is still used switch, switch for detecting long-term work in the humidity of the great occasions, the choice of capacitive proximity switches, according to PLC I / O terminal of the connection mode, select the type of close PNP switch, the control system of Figure 1. 3.2 Systems Programming PLC controller programming focus and the core is around Jiugang the rotation speed control and Jiugang on 60 bottles of detecting the location of the displaced, broken bottles, empty bottles at the location of testing and related displacement filling Such as control valves. The bottles displacement of testing procedures, using a Mitsubishi PLC in the left command.Figure 1 control system structure diagram .Bottles displacement of detection, using the left-PLC command, which commands the whole of one of the core control procedures, the main electrical switch detection and bottles at the bottle simultaneously detect mobile, the main motor to every week, just to the corresponding Jiugang Have a bottle of, PLC unit within the internal correspondence that 60 bottles of the unit for the M500 ~ M559, the number of units by the first letter K is set to K60, with each change in a second letter K is set to K1, M50 Reaction of the empty bottles in the short position, and detect the location of the motor speed to go on the frequency shift in the corresponding unit within the built-in "1" or "0", control valves and the corresponding mixing caps The motor stopped and opened. Continuous detection system in place after the 90 empty bottles, stop stirring caps the motor running, testing the number of bottles in accordance with the user's requirements canbe arbitrary.A bottle of detection. Rotary Jiugang through pressure to back pressure with the bottle of liquor in the process of empty bottles in the back-pressure, because the bottle itself may crack and other reasons leading to a sudden burst bottles, which need to detect the location of unexploded bottle bottle, in this bottle - The position opened purge solenoid valves, compressed air out, broken bottles at the bottle-blowing from the position in a row after the purge and several bottles of the electromagnetic valve open jet, a high-pressure spray Shuizhu, in the break Bottle position around a few bottles of spray bottles in a row.Detection of broken bottles and bottle-detection switch simultaneously detect movement of breaking bottles, to the main motor of each week, precisely corresponding Jiugang passed a bottle of, PLC unit within the internal correspondence that 20 broken bottles at the unit for the M600 ~ M619, unit With the number of the first letter K is set to K20, with each change in a second letter K is set to K1, M52 response to the location of the broken bottles and detected the location of the motor speed to the frequency shift continue, In the corresponding unit within the built-in "1" or "0", control and the corresponding jet purge solenoid valve opened and stopped. Continuous Spray and purge solenoid valve open to listen, time stopped in accordance with technological requirements can be arbitrary.System security is to control access to the caps simultaneously tracking, not only accurately detect the electrical switching speed detection, the broken bottles into the bottle and detection switch detection switch three conditions.970GOT human-computer touch-screen terminals operated by the software company's Mitsubishi GT WORKS package, whichis a GT Designer with the entire GOT9000 series of graphics software packages. The package is simple, prior to a personal computer simulation on the configuration and debug, after the man-machine operators to download terminals. At the same time, because the man-machine interface and a touch-screen role, will set common switch on the screen to facilitate the operation. And also to increase the number of features, such as setting alarm information. 4.After transformation control systemSystem at the normal operation of the machine for automatic control, in accordance with bottles into and out of the bottle for lack or slow pace set by running into the bottle stall bottles, no less than a bottle cap, automatic washing bottles burst, filling automatic back-pressure position , Covered under the system automatically lose covered a stop and safety protection, such as the coordination of action interlock. All the original button after the operation of the touch screen on. 5.Detection of the state control system monitoringDetection switch into the bottle and break bottles detection switch bottles of pressure by testing each part of the small metal plates above the location of a photoelectric pulse output, a further PLC acquisition, as each bottle of the pressure above the small metal plates is the location of activities , In the machine running after some time, some pressure above the small bottles of iron tablets and detection switch in the location of displacement, resulting in detection switch mistaken judgement, if not for the judgement of bottles of bottles, bottle explosion Lou Jian, misuse, such as the seizure of output errors So that the PLC have mistaken action, such as a back-pressure, unexploded bottle blowing, washing, stirring cap control system malfunction, such as failure phenomenon.Before the transformation of the daily production process, encountered this phenomenon, the operatives could only switch to the various functional or manual control buttons reach the stall so that the equipment work in the absence of monitoring state, the machine lost control function. Caused a lot of production of raw materials such as gas, water, wine waste. Only in the production of intermittent, can be fitter and maintenance electrician in accordance with the detection of small switch on the light-emitting diodes and anti-displacement by adjusting the distance only 5 ~ 8 mm detection switch installation location, and switch to fix detection of small metal plates Gap. This means of detection is very backward, after adjustment reaction to the results, timely response can not be adjusted results.In view of this testing situation, after the transformation of the filling, Gland control system configuration, this part of a new detection and integration in human-computer touch screen, complete bottle of detection.In human-computer touch screen interface on the page display, respectively, at customs, such as electromagnetic motor mixing valve switch state are in different colors to show, very intuitive.Increase the system's functions is to ensure the irrigation of the machine-Gland normal operation of automated control system specifically designed to. 6 Concluding remarks After the transformation of the control system will greatly simplify the complicated mechanical structure, the running and control of inspection, the degree of automation systems meet the design requirements, greatly reducing the operational strength of the labor so that the shrub-like beer output than in the past Raising more than 30 percent, greatly reduce the failure rate.Embodies the modern equipment of automatic control technology. In the digestion and absorption of today's industrial control on the basis of advanced technology innovation, development of domestic technology from the most advanced filling control system.啤酒灌装、压盖机PLC控制系统1、引言啤酒生产过程分为麦芽制造、麦芽汁制造、前发酵、后发酵、过滤灭菌、包装等几道工序。
PLC控制系统外文翻译
PLC控制系统外文翻译附录Abstract: Programmable controller in the field of industrial control applications, and PLC in the application process, to ensure normal operation should be noted that a series of questions, and give some reasonable suggestions.Key words: PLC Industrial Control Interference Wiring Ground Proposal DescriptionOver the years, programmable logic controller (hereinafter referred to as PLC) from its production to the present, to achieve a connection to the storage logical leap of logic; its function from weak to strong, to achieve a logic control to digital control of progress; its applications from small to large, simple controls to achieve a single device to qualified motion control, process control and distributed control across the various tasks. PLC today in dealing with analog, digital computing, human-machine interface and the network have been a substantial increase in the capacity to become the mainstream of the field of control of industrial control equipment, in all walks of life playing an increasingly important role.ⅡPLC application areasCurrently, PLC has been widely used in domestic and foreign steel, petroleum, chemical, power, building materials, machinery manufacturing, automobile, textile, transportation, environmental and cultural entertainment and other industries, the use of mainly divided into the following categories:1. Binary logic controlReplace traditional relay circuit, logic control, sequential control, can be used to control a single device can also be usedfor multi-cluster control and automation lines. Such as injection molding machine, printing machine, stapler machine, lathe, grinding machines, packaging lines, plating lines and so on.2. Industrial Process ControlIn the industrial production process, there are some, such as temperature, pressure, flow, level and speed, the amount of continuous change (ie, analog), PLC using the appropriate A / D and D / A converter module, and a variety of control algorithm program to handle analog, complete closed-loop control. PID closed loop control system adjustment is generally used as a conditioning method was more. Process control in metallurgy, chemical industry, heat treatment, boiler control and so forth have a very wide range of applications3. Motion ControlPLC can be used in a circular motion or linear motion control. Generally use a dedicated motion control module, for example a stepper motor or servo motor driven single-axis or multi-axis position control module, used in a variety of machinery, machine tools, robots, elevators and other occasions.4. Data ProcessingPLC with mathematics (including matrix operations, functions, operation, logic operation), data transfer, data conversion, sorting, look-up table, bit manipulation functions, you can complete the data collection, analysis and processing.Dataprocessing is generally used, such as paper making, metallurgy, food industry, some of the major control system5. Communications and networkingPLC communication with the communication between PLC and the PLC and other communications between intelligentdevices. Along with the development of factory automation network, the PLC now has communication interface, communication is very convenient.ⅢApplication features of PLC1. High reliability, strong anti-interferenceHigh reliability is the key to performance of electrical control equipment. PLC as the use of modern large scale integrated circuit technology, using the strict production process, the internal circuits to the advanced anti-jamming technology, with high reliability. Constitute a control system using PLC, and the same size compared to relay contactor system, electrical wiring and switch contacts have been reduced to hundreds or even thousands of times, fault also greatly reduced. In addition, PLC hardware failure with self-detection, failure alarm timely information. In the application software, application are also incorporated into the peripheral device fault diagnosis procedure, the system is in addition to PLC circuits and devices other than the access protection fault diagnosis. In this way, the whole system extremely high reliability.2. Fully furnished, fully functional, applicabilityPLC to today, has formed a series products of various sizes, can be used for occasions of all sizes of industrial control. In addition to processing other than logic, PLC data, most of computing power has improved, can be used for a variety of digital control in the field. A wide variety of functional units in large numbers, so that penetration to the position of PLC control, temperature control, CNC and other industrial control. Enhanced communication capabilities with PLC and human-machine interface technology, using the PLC control system composed of a variety of very easily.3. Easy to learn, well engineering and technical personnel welcomePLC is facing the industrial and mining enterprises in the industrial equipment. It interfaces easily, programming language easily acceptable for engineering and technical personnel. Ladder language, graphic symbols and expressions and relay circuit very close to are not familiar with electronic circuits, computer principles and assembly language do not understand people who engage in industrial control to open the door.4. System design, the workload is small, easy maintenance, easy to transformPLC logic with memory logic instead of wiring, greatly reducing the control equipment external wiring, make the control system design and construction of the much shorter period, while routine maintenance is also easier up, even more important is to change the procedures of the same equipment has been changed production process possible. This is particularly suitable for many varieties, small batch production situations.(1)Installation and wiring● Power lines, control lines and power lines and PLC I / O lines should be split wiring, isolation transformer and PLC and I / O should be used between the cable connection Shuangjiao. The PLC's IO lines and power lines go separate lines, such as to be in the same groove, the separation of bundled communication lines, DC lines, if conditions allow, the best sub-groove alignment, not only will it have the greatest possible distance and can reduce the noise to a minimum.● PLC should stay away from strong interference sources such as welding, high-power silicon rectifier devices and large power equipment, not with the high-voltage electrical switchinstalled in the same cabinet. PLC in the cabinet should stay away from power lines (the distance between the two should be more than 200mm). And PLC cabinets installed within the same inductive load, such as large power relay, contactor coil, arc should be parallel RC circuit.● PLC input and output separately from the best alignment, switch and analog should be laid separately. The transmission of analog signals should be shielded cable, one end or both ends of the shield should be grounding resistance should be less than the shielding layer 1 / 10.● AC output line and DC output lines do n ot use the same cable, the output line should be far from power lines and power lines, to avoid parallel.(2)I / O wiring terminalInput Connection● Input wiring generally not too long. But if the environment interfere with small, small voltage drop, the input terminal can be properly longer.●Input / output lines can not be used with a cable, input / output lines should be separated.● The extent possible, normally open contact form to connect to the input in the establishment of the ladder and relay the same schematic, easy to read。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC控制下的电梯系统由继电器组成的顺序控制系统是最早的一种实现电梯控制的方法。
但是,进入九十年代,随着科学技术的发展和计算机技术的广泛应用,人们对电梯的安全性、可靠性的要求越来越高,继电器控制的弱点就越来越明显。
电梯继电器控制系统故障率高,大大降低了电梯的可靠性和安全性,经常造成停梯,给乘用人员带来不便和惊忧。
且电梯一旦发生冲顶或蹲底,不但会造成电梯机械部件损坏,还可能出现人身事故。
可编程序控制器(PLC)最早是根据顺序逻辑控制的需要而发展起来的,是专门为工业环境应用而设计的数字运算操作的电子装置。
鉴于其种种优点,目前,电梯的继电器控制方式己逐渐被PLC控制所代替。
同时,由于电机交流变频调速技术的发展,电梯的拖动方式己由原来直流调速逐渐过渡到了交流变频调速。
因此,PLC控制技术加变频调速技术己成为现代电梯行业的一个热点。
1. PLC控制电梯的优点(1)在电梯控制中采用了PLC,用软件实现对电梯运行的自动控制,可靠性大大提高。
(2)去掉了选层器及大部分继电器,控制系统结构简单,外部线路简化。
(3)PLC可实现各种复杂的控制系统,方便地增加或改变控制功能。
(4) PLC可进行故障自动检测与报警显示,提高运行安全性,并便于检修。
(5)用于群控调配和管理,并提高电梯运行效率。
(6)更改控制方案时不需改动硬件接线。
2.电梯变频调速控制的特点随着电力电子技术、微电子技术和计算机控制技术的飞速发展,交流变频调速技术的发展也十分迅速。
电动机交流变频调速技术是当今节电、改善工艺流程以提高产品质量和改善环境、推动技术进步的一种主要手段。
变频调速以其优异的调速性能和起制动平稳性能、高效率、高功率因数和节电效果,广泛的适用范围及其它许多优点而被国内外公认为最有发展前途的调速方式交流变频调速电梯的特点⑴能源消耗低⑵电路负载低,所需紧急供电装置小在加速阶段,所需起动电流小于2.5倍的额定电流。
且起动电流峰值时间短。
由于起动电流大幅度减小,故功耗和供电缆线直径可减小很多。
所需的紧急供电装置的尺寸也比较小。
⑶可靠性高,使用寿命长。
⑷舒适感好电梯运行是跟随最佳给定的速度曲线运行的。
其特性可适应人体感受,并保证运行噪声小,制动平稳⑸平层精度高⑹运行平稳无噪声在轿厢内,机房内及邻近区域确保噪声小。
因为其系统中采用了高时钟频率。
始终产生一个不失真的正弦波供电电流。
电动机不会出现转距脉动。
因此,消除了振动和噪声。
3.电梯控制技术所谓电梯控制技术是指电梯的传动系统及操纵系统的电气自动控制。
作为我国20世纪70年代电梯的主要标志是交流双速电梯。
其调速方法是采用改变电梯牵引电动机的极对数,两种或两种不同级对数的绕组,其中极数少的绕组称为高速绕组,极数多的绕组称为低速绕组。
高速绕组用于电梯的起动及稳速运行,低速绕组用于制动及电梯的维修。
80年代初,VVVF变频变压系统控制的电梯问世。
它采用交流电动机驱动,却可以达到直流电动机的水平,目前控制速度已达6米/秒。
它的体积小,重量轻,效率高,节省能源等几乎包括了以往电梯的所有优点。
是目前最新的电梯拖动系统。
电梯在垂直运行过程中,有起点站也有终点站。
对于三层楼以上的建筑物的电梯,起点站和终点站之间还没有停靠站,起点站设在一楼,终点站设在最高楼。
设在一楼的起点站称为基站,起点站和终点站称为两端站,两端站之间称为中间站。
各站厅外设有召唤箱,箱上设置有供乘用人员召唤电梯用的召唤按钮或触钮,一般电梯在两端站的召唤箱上各设置一只按钮或触钮。
中间层站的召唤箱各设置两只按钮或触钮。
对于无司机控制的电梯,在各层站的召唤箱上均设置一只按钮或触钮。
而电梯的轿厢内部设置有(杂物电梯除外)操纵箱。
操纵箱上设置有手柄开关或与层站对应的按钮或触钮,操纵箱上的按钮或触钮城内指令按钮或触钮。
外指令按钮或触钮发出的电信号称为外指令信号,内指令按钮或触钮发出的电信号成为内指令信号。
20世纪80年代中期后,触钮已被微动按钮所取代。
作为电梯基站的厅外召唤箱,除设置一只召唤按钮或触钮外,还设置一只钥匙开关,以便下班关电梯时。
司机或管理人员把电梯开到基站后,可以通过专用钥匙扭动该钥匙开关。
把电梯的厅门关闭妥当后,自动切断电梯控制电源或动力电源。
4. PLC控制电梯的设计随着城市建设的不断发展,高层建筑不断增多,电梯在国民经济和生活中有着广泛的应用。
电梯作为高层建筑中垂直运行的交通工具已与人们的日常生活密不可分。
实际上电梯是根据外部呼叫信号以及自身控制规律等运行的,而呼叫是随机的,电梯实际上是一个人机交互式的控制系统,单纯用顺序控制或逻辑控制是不能满足控制要求的,因此,电梯控制系统采用随机逻辑方式控制。
目前电梯的控制普遍采用了两种方式,一是采用微机作为信号控制单元,完成电梯信号的采集、运行状态和功能的设定,实现电梯的自动调度和集选运行功能,拖动控制则由变频器来完成;第二种控制方式用可编程控制器(PLC)取代微机实现信号集选控制。
从控制方式和性能上来说,这两种方法并没有太大的区别。
国内厂家大多选择第二种方式,其原因在于生产规模较小,自己设计和制造微机控制装置成本较高;而PLC可靠性高,程序设计方便灵活,抗干扰能力强、运行稳定可靠等特点,所以现在的电梯控制系统广泛采用可编程控制器来实现。
5.电梯控制系统特性在电梯运行曲线中的启动段是关系到电梯运行舒适感指标的主要环节,而舒适感又与加速度直接相关,根据控制理论,要使某个量按预定规律变化必须对其进行直接控制,对于电梯控制系统来说,要使加速度按理想曲线变化就必须采用加速度反馈,根据电动机的力矩方程式:M—MZ=ΔM=J(dn/dt),可见加速度的变化率反映了系统动态转距的变化,控制加速度就控制系统的动态转距ΔM=M—MZ。
故在此段采用加速度的时间控制原则,当启动上升段速度达到稳态值的90%时,将系统由加速度控制切换到速度控制,因为在稳速段,速度为恒值控制波动较小,加速度变化不大,且采用速度闭环控制可以使稳态速度保持一定的精度,为制动段的精确平层创造条件。
在系统的速度上升段和稳速段虽都采用PI调节器控制,但两段的PI参数是不同的,以提高系统的动态响应指标。
在系统的制动段,即要对减速度进行必要的控制,以保证舒适感,又要严格地按电梯运行的速度和距离的关系来控制,以保证平层的精度。
在系统的转速降至120r/min之前,为了使两者得到兼顾,采取以加速度对时间控制为主,同时根据在每一制动距离上实际转速与理论转速的偏差来修正加速度给定曲线的方法。
例如在距离平层点的某一距离L处,速度应降为Vm/s,而实际转速高为V′m/s,则说明所加的制动转距不够,因此计算出此处的给定减速度值-ag后,使其再加上一个负偏差ε,即使此处的减速度给定值修正为-(ag+ε)使给定减速度与实际速度负偏差加大,从而加大了制动转距,使速度很快降到标准值,当电动机的转速降到120r/min 以后,此时轿厢距平层只有十几厘米,电梯的运行速度很低,为防止未到平层区就停车的现象出现,以使电梯能较快地进入平层区,在此段采用比例调节,并采用时间优化控制,以保证电梯准确及时地进入平层区,以达到准确可靠平层。
Elevator System Based on PLC Composed by the order of relay control system is a realization of the first elevator control method. However, to enter the nineties, with the development of science and technology and the widespread application of computer technology, the safety of elevators, reliability of the increasingly high demand on the relay control weaknesses are becoming evident.Elevator control system relays the failure rate high, greatly reduces the reliability and safety of elevators, and escalators stopped often to take with the staff about the inconvenience and fear. And the event rather than taking the lift or squat at the end of the lift will not only cause damage to mechanical components, but also personal accident may occur.Programmable Logic Controller (PLC) is the first order logic control in accordance with the needs of developed specifically for industrial environment applications to operate the electronic digital computing device. Given its advantages, at present, the relay control the lift has been gradually replaced by PLC control. At the same time, AC variable frequency motor speed control technology, the way the lift drag speed has been a gradual transition from DC to AC frequency converter. Thus, PLC control technology increases VVVF Elevator modern technology has become a hot industry.1. PLC elevator control advantages(1) used in elevator control PLC, with software for automatic control of liftoperation, reliability greatly increased.(2) layer was removed and a majority of the relay, the control system structure issimple, to simplify the external circuit.(3) PLC can be a variety of complex control system, easy to add or changecontrol functions.(4) PLC can be automated fault detection and alarm display to improve theoperation of security and ease of maintenance.(5) for the group control the allocation and management, and improve theefficiency of elevator operation.(6) do not need to change the control scheme changes when the hardware connection.2. VVVF elevator control characteristicsWith the power electronics, microelectronics and computer technology to control the rapid development of technology, communication technology VVVF also a veryrapid rate. AC variable frequency motor speed control technology is the power to improve the process in order to improve product quality and improving the environment and promoting technological progress as a primary means. Frequency of its excellent performance and the speed brake from a smooth performance, high efficiency, high power factor and power-saving effect of a broad scope of application and many other advantages of being at home and abroad recognized as the most promising approach speedExchange characteristics of VVVF Elevator(1)low energy consumption(2) low load circuit, the required emergency power supply device of smallIn the acceleration stage, the required start-up current of less than 2.5 times the rated current. Peak starting current and time is short. Since the starting current is drastically reduced, so power consumption and power supply cable diameter can be reduced a lot. Required for emergency power supply devices are also relatively small size.(3) high reliability and long service life.(4) good comfortElevator operation is best to follow the speed curve of a given operation. Their characteristics can be adapted to human feelings, and to ensure that noise operation, smooth brakePing layer and high precision(5) Stable noise-free(6) In the car, the engine room and adjacent areas to ensure that noise. Because their systems use a high clock frequency. Always produce a true sine wave power supply current yet. Motor torque ripple does not appear. Therefore, to eliminate vibration and noise.3. Elevator control technologyThe so-called elevator control technology refers to the elevator drive system and electrical control system of automatic control. 70 as the 20th century in China's elevator was marked by the exchange of two-speed elevator. Its speed is used to change the elevator traction motor of the very few, two or multi-level approach to the number of windings, very few of them as high-speed winding of the winding, a very few number of windings as the low-speed winding. Windings for high-speedelevator-speed start-up and running, low-speed windings for braking and the maintenance of elevators.The early 80s, VVVF inverter controlled variable lift system available. It uses AC motor drives, are able to reach the level of DC motor, control the speed of the current has reached 6 m / sec. Its small size, light weight, high efficiency, energy saving, including the past almost all the advantages of the lift. Is the latest elevator drive system.Operation in vertical lift, there is also the starting point of the terminus station. For more than three-story elevator buildings, the starting point of the terminal stations and stops between the had not, the starting point for these stations at the first floor of the terminal located at the highest floor. Starting point in the first floor of the station known as base stations, known as the starting point at both ends of the terminal stations and stations at both ends of intermediate stops between stations.Outside the station has a call box, box set are used by staff for elevator call button or touch the call button, the general ends of the lift stations in the call box on the Settings button or touch of a button. Middle layer of the station set up the call box button or touch button 2. No drivers for the control of elevators, at various stations are set up calls me on a button or touch button. Elevator car and the internal settings (except for debris elevator) to manipulate me. Control box switch on the handle or set up stations and the corresponding layer of buttons or touch-button control box on the touch-control button or command button or touch the city button. Outside the command button or touch-button issue as the signal outside the command signal, within the command button or touch-button issue within the signal as a command signal. 80 In the mid-20th century, the touch button has been replaced by micro-button.As the elevator call box outside the base station, in addition to set up a call button or touch button, but also set a key switch in order to work the elevator clearance. Drivers or management staff to open the elevator to the base station can wriggle through a dedicated key to the key switch. Close the elevator in place to automatically cut off the elevator control power supply or power supply.4. PLC Control Elevator DesignWith the continuous development of urban construction, the increasing high-rise buildings, elevators and life in the national economy has a broad application. Elevator high-rise buildings as a means of transport in the vertical run of daily life has beeninextricably linked with people. In fact the lift is based on external call control signals, as well as the laws of their own, such as running, and the call is random, the lift is actually a man-machine interactive control system, simple to use control or logic control order can not meet the control requirements, and therefore , elevator control system uses a random control logic. Elevator control is currently generally used in two ways, first, the use of computer as a signal control unit, the completion of the lift signal acquisition, operation and function of the set, to achieve the lift and set the automatic scheduling function to run the election, drag the control from inverter to complete; the second control mode with programmable logic controller (PLC) to replace the computer control signal sets the election. From the control and performance, these two types of methods and there is no significant difference. Most of the domestic manufacturers to choose the second approach, because the smaller scale of production, their design and manufacture of high cost of computer control devices; and PLC high reliability, convenient and flexible program design, anti-interference ability, stable and reliable operation of the characteristics of Therefore, the elevator control system is now widely used to realize programmable controller.5. Elevator control system characteristicsOperation of the lift curve is above the start to run comfort indicators lift the key features, and comfort are directly related with the acceleration, according to control theory, for a certain amount of change according to the law must be directly controlled, for elevator control system, according to the ideal acceleration curve acceleration feedback to be used, in accordance with the motor torque equation: M-MZ = ΔM = J (dn / dt), can be seen reflected in the rate of change of acceleration of the system of dynamic torque changes on the control system to control the acceleration of the dynamic torque ΔM = M-MZ. Therefore, during this time to control the use of the principle of acceleration, when the start rate of increase in steady-state value above 90%, the acceleration control system by the switch to speed control, as in paragraph steady speed, speed control for the constant fluctuations in the smaller, little change in acceleration, speed and the use of closed-loop control can maintain a steady-state speed accuracy and precision for the braking section to create the conditions ping layer. Is rising at a rate in the system, and although the above-speed PI regulator used to control, but two of the PI parameters are different in order to improve the system dynamic response indicators. The brake in the system,that is, to reduce the speed of control necessary to ensure the comfort, but also strictly in accordance with the operation of the lift of the relationship between speed and distance control to ensure the accuracy of flat layers. To the speed in the system before 120r/min, in order to take into account both be taken to control the acceleration of time-based and at the same time in each braking distance based on actual speed and speed deviations from the theory to fix the acceleration curve of a given method. For example, from a flat layer at the distance L, the speed should be reduced to Vm / s, while the actual high speed V'm / s, is illustrated by the increase in the braking torque is not enough here, therefore to calculate value determined by the speed-ag after it combined with a negative deviation of ε, even here the value given by the spe ed of amended - (ag + ε) so that a given rate of deceleration and the actual increase of negative bias, which increases braking torque big, so fast down to the standard value, when the motor speed 120r/min down after the car at this time only a dozen or so cm layer anomaly, low speed lift, in order to prevent yet floor parking area on the phenomenon in order to enable faster access to the lift to floor area ratio adjustment used in this paragraph and the use of optimal control of time in order to ensure accurate and timely access to elevator floor area, in order to achieve accurate and reliable level layer.。