第3章3_多自由度体系的振动.
第六讲--多自由度系统振动-2
解: 1)求柔度系数
m
31
k/5
m
21
k/3
P=1
2m k
11
32 4
P=1
22 4 12
P=1
33 9
23 4 13
11 1/ k 21 31 11
22
1 k
1 k /3
4
22
1 k
1 k/3
1 9
k /5
3.3.1 柔度法
1 1 1
柔度矩阵: [ ] 1 4 4
1 4 9
2)求频率
2 0 0
质量矩阵: [M] m 0 1 0
0 0 1
由频率方程: M I 0
2 1 1 m 2 4 4 0 ,
2 4 9
展开式为: 3 15 2 42 30 0
1 m m2
方程三个根为: 1 11.601 2 2.246 3 1.151
三个频率为:
1 0.2936
k m
4Y
4 4
3.4.1 主振型矩阵与正则坐标
(2)正则坐标 任意一个质点的位移 y 都可按主振型来组合:
y1 1Y11 2Y12 3Y13 y2 1Y21 2Y22 3Y23
yi 1Yi1 2Yi2 3Yi3
yn 1Yn1 2Yn2 3Yn3
nY1n nY2n
y1
y2
Y1 Y121
Y YYY132111
Y2 1
Y2 2
Y32
Y3 1
Y3 2
Y33
Y14 Y4
2
Y34
Y41
Y2 4
Y3 4
Y44
主 振
型 矩 阵
第一振型
1
第3章 振动系统的运动微分方程题解
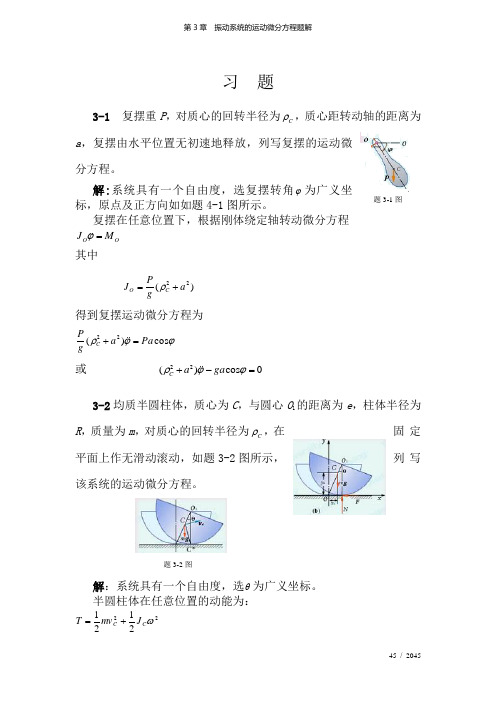
45 / 2045习 题3-1 复摆重P ,对质心的回转半径为C ρ,质心距转动轴的距离为a ,复摆由水平位置无初速地释放,列写复摆的运动微分方程。
解:系统具有一个自由度,选复摆转角ϕ为广义坐标,原点及正方向如如题4-1图所示。
复摆在任意位置下,根据刚体绕定轴转动微分方程O O M J =ϕ其中)(22a gP J C O +=ρ 得到复摆运动微分方程为ϕϕρcos )(22Pa a gP C =+ 或0cos )(22=-+ϕϕρga a C3-2均质半圆柱体,质心为C ,与圆心O 1的距离为e ,柱体半径为固定R ,质量为m ,对质心的回转半径为C ρ,在平面上作无滑动滚动,如题3-2图所示,列写该系统的运动微分方程。
解:系统具有一个自由度,选θ为广义坐标。
半圆柱体在任意位置的动能为:222121ωC C J mv T +=题3-1图题3-2图46 / 2046用瞬心法求C v :2222*2)cos 2()(θθθ Re R e CC v C -+== θω = 2CC m J ρ= 故2222221)cos 2(21θρθθ Cm Re R e m T +-+=系统具有理想约束,重力的元功为 θθδd mge W sin -=应用动能定理的微分形式W dT δ=θθθρθθd mge m Re R e m d C sin 21)cos 2(2122222-=⎥⎦⎤⎢⎣⎡+-+ θθθθθθθθθθρd mge d mRe d mRe d R e m C sin sin cos 2)(2222-=+-++ 等式两边同除dt ,θθθθθθθθθθρ sin sin cos 2)(2222mge mRe mRe R e m C -=+-++ 0≠θ ,等式两边同除θ故微分方程为0sin sin )cos 2(2222=+++-+θθθθρθmge mRe Re R e m C ① 若为小摆动θθ≈sin ,1cos ≈θ,并略去二阶以上微量,上述非线性微分方程可线性化,系统微摆动的微分方程为0])[(22=++-θθρge r R C要点及讨论(1)本题也可以用平面运动微分方程求解。
机械振动学(第三章)-多自由度振动系统

装备制造学院
College of Equipment Manufacture
利用直接法,对下图所示的三自由度振动系统建立微分方程。。
装备制造学院
College of Equipment Manufacture
解:1)受力分析 选取 m1, m2和m3离开平衡位置的坐标x1, x2和 x3 为3 个独立 坐标。受力分析如图所示 2)建立振动微分方程 (c c ) x c x ( k k ) x k x p (t ) x m1: m 2 2 2 2 2 ( c 2 c 3 ) x 2 c2 x 1 c 3 x 3 ( k 2 k 3 ) x 2 k 2 x1 k 3 x 3 p 2 ( t ) x m2: m 2 2 2 2 3 c 3 x 3 c3 x 2 k 3 x3 k 3 x 2 p 3 (t ) x m3: m 3
装备制造学院
College of Equipment Manufacture
本章结束
装备制造学院 College of Equipment Manufacture
3 )如果将应为能量耗散函数 D 引起的阻尼力也从其他的非势 力的广义力中分离出来,并使Qi仅代表外部作用的广义激振力, 则可将非保守系统的拉格朗日方程改为:
d dt ( T i q ) T i q U qi D i q Q i ( i 1, 2 , 3 ,...., n )
车 身 车 轮 二 自 由 度 振 动 问 题
装备制造学院
College of Equipment Manufacture
装备制造学院
College of Equipment Manufacture
第五六讲两自由度系统的振动

s in(02t
2
)
A(1) 1
,
A(2) 1
,
1,
2
由运动的初始条件确定。
3、系统对初始激励的响应
将(5)式写出以下形式:
x1(t) x2 (t)
C1 sin(01t C1r1 sin(01t
1) 1)
C2 sin(02t 2 ) C2r2 sin(02t 2
J1
0
0 J2
12
k1
k k 2
2
k 2
k 2 k
3
1
2
M1 (t ) M 2 (t)
多自由度系统的角振动与直线振动在数学描述上相同
如同在单自由度系统中做过的那样,在多自由度系统中 也将质量、刚度、位移、加速度及力都理解为广义的。
)
将 x10,x20,x10,x20 代入得:
其中C1、C2分别表 示A1(1)、A1(2)
C1
1 r2 r1
r2 x10 x20
2
r2 x10 x20
2 01
2
C2
1 r2 r1
x20 r1x10 2
x20 r1x10 2
量
量
若系统有 n 个自由度,则各项皆为 n 维
17
3.2 两自由度系统的自由振动
1、固有频率求解
有上一讲可知系统的
x1
k1
k2
m1
运动微分方程为::
x2
k3
m2
m1x1 (k1 m2x2 k2 x1
第3章 实验模态分析的基本理论

实验模态分析第三章:实验模态分析的基本理论振动系统的特性可以用模态来描述:固有频率、固有振型(主振型)、模态质量、模态刚度和模态阻尼等。
建立用模态参数表示的振动系统的运动方程并确定其模态参数的过程使称为模态分析。
—种理解可以认为,振动系统的物理模型、物理参数和以物理参数表示的运动方程都是已知的,引入模态参数、建立模态方程的目的是为了简化计算,解除方程耦合,缩减自由度。
另一种理解可以认为,通过对实际结构的振动测试,识别振动系统的模态参数,从而建立起系统的以模态参数表示的运动方程,供各种工程计算应用。
试验模态分析指的是后一种过程,即通过振动测试(称模态试验),识别模态参数,建立以模态参数表示的运动方程这样一个过程。
1 多自由度系统振动基础回顾&&&++=M x C x K x f t []{}[]{}[]{}{()} 2实模态理论一个n 自由度线性定常振动系统,其运动方程可以如下表示:现对两端作付氏变换得:[]{}[]{}[]{}{()}M x C xK x f t ++=&&&2([][][]){()}{()}M j C K X F ωωωω−++=式中和分别是x(t)和F(t)的付氏变换,并有()X ω()F ω()()j t X x t e dt ωω+∞−−∞=∫()()j t F f t e dtωω+∞−−∞=∫(){()}{()}Z X F ωωω=111212122212()()()()()()()()()()n n n n nn Z Z Z Z Z Z Z Z Z Z ωωωωωωωωωω⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦L L L L L L L 1()[()]{()}{()}{()}X Z F H F ωωωωω−==2[][][]K M j C ωω=−+阻抗矩阵中各元素值无法在实际振动测试中获得,因为人们不可能在实际结构上固定其它坐标,令其不动,仪留下J坐标,待其作出响应;也不可能仅使某个坐标运动,在其余坐标上测量力。
建筑结构抗震设计课件第3章第4节

i2
m1
i振型上的惯性力在
j振型上作的虚功
X1i
m2
mn
X X
2i ni
i2
m
X
i
Wij m1i2 X1i X1j m2i2 X2i X2 j L
i2
X
T j
m
X
i
2.主振型的正交性
i振型上的惯性力在 j振型上作的虚功:
Wij
i2
X
2k m2 k12
0
k k m2
m2
EI1
k2 m1
EI1
k1
X
1
1 1.618
X 2
1 0.618
(2k 2m) k 2m k2 0
1.618
0.618
1 0.618 k / m 2 1.618 k / m
X11 1 ; X12 1 X 21 1.618 X 22 0.618
y1 y2
X1 sin(t ) X2 sin(t )
k11 X1 k21 X1
k12 X 2 k22 X 2
m12 X1 0 m22 X 2 0
(
k11 k21
k12
k22
m1 0 0 m2
2
)
X1 X2
=
0 0
(k2 m)X 0...366
k2 m 0...(3 69)
i) i)
质点上的惯性力为:
X 21
m2
X
2i
2 i
I1(t) I2 (t)
m1 y1 m2 y2
m1
X
1i
2 i
sin(
i
t
i
m2
振动力学(两自由度系统和多自由度系统)

2
振动理论及应用
第3章 多自由度系统的振动
3.1 两自由度系统的振动方程 ——刚度矩阵和质量矩阵
建立运动微分方程的方法和单自由度系统基本一样, 但难 度更大。
3.1.1 运动微分方程
标准的m-k-c系统,对每一质量利用牛顿定律得:
3
振动理论及应用
坐标原点仍取在静平衡位置
具体求解时,只假设j坐标处的位移为1,其它各坐标的位 移均为0。
7
振动理论及应用
5.2.3 惯性影响系数与质量矩阵
第3章 多自由度系统的振动
质量矩阵[M]中的元素称为惯性(质量)影响系数,其 mij的力学意义是:仅在j坐标处产生单位广义加速度,需在i坐 标处施加的广义力。
具体求解时,只假设j坐标处的加速度为1,其它各坐标的 加速度均为0。
2
x1 5 kx1 5 kx2
V x2
2 5
kx1
1 5
kx2
26
振动理论及应用
第3章 多自由度系统的振动
计算广义力,设只有x1处产生虚位移x1,则
Q1
cx1 x1 x1
cx1
同样设x2处产生虚位移x2,则
Q2
c 0
x2
0
代入拉格朗日方程即可。
27
振动理论及应用
第3章 多自由度系统的振动
5l 3
48EI
k12
l3 3EI
k22
1
求出各个刚度系数即组 成刚度矩阵[K]。
17
振动理论及应用
第3章 多自由度系统的振动
用拉格朗日方程 建立振动系统的运动微分方程
对于非标准的m-k-c多自由度振动系统,用传统的动力学 方法建立运动微分方程比较困难,更适合使用拉格郎日方程和 能量的方法。拉格郎日方程为:
同济 汽车振动 机械振动 PPT第三章+多自由度系..
1 1 1 3 −1 0 1 1 1 6 0 0 KΦ = ΦT KΦ = 2 0 −1 k −1 2 −1 2 0 −1 = k 0 6 0 1 −1 1 0 −1 3 1 −1 1 0 0 12
变换后的方程为:
&& QN + KNQN = P N
&& qN1 +ω q = pN1 ( t ) && qN2 +ω q = pN2 ( t ) M 2 qNn +ωnnqNn = pNn ( t ) &&
注意:以上为广义的向量正交性的概念 注意:
当i = j时,A KA = ω A MA
2 ni
( i)T
( i)
( i)T
( i)
由于质量矩阵为正定矩阵,刚度矩阵为半正定 矩阵,因此有:
设 (i) MA(i) = m →第阶 量 质量) A i 主质 ( 模态 pi i ( i)T 设 KA( ) = kpi →第阶 i 主刚 ( 模态刚 ) 度 度 A 2 ωni = kpi mpi 第阶 i 固有 频率
( 4)
MA = 0
( i)
Qi ≠ j ⇒ω ≠ ω ⇒ A MA = 0
2 ni 2 nj
( j)T ( i)
代 (1) ⇒ A KA = 0 入
( j)T
当 ≠ j时 i , ( j )T A MA( i) = 0 主振型向量对质量矩阵的正交性 jT A( ) KA( i) = 0 主振型向量对刚度矩阵的正交性
( 2)
L 0 O M ( n)T ( n) L A KA L 0
土木工程抗震第3章教案工程结构地震反应分析与抗震验算

第3章 工程结构地震反应分析与抗震验算1、地震作用的计算方法:底部剪力法(不超过40m 的规则结构)、振型分解反应谱法、时程分析法(特别不规则、甲类和超过规定范围的高层建筑)、静力弹塑性方法。
一般的规则结构:两个主轴的振型分解反应谱法;质量和刚度分布明显不对称结构:考虑扭转或双向地震作用的振型分解反应谱法;8、9度时的大跨、长悬臂结构和9度的高层建筑:考虑竖向地震作用。
2、结构抗震理论的发展:静力法、定函数理论、反应谱法、时程分析法、非线性静力分析方法。
3、单自由度体系的运动方程:g xm kx x c x m -=++或m t F x x x e /)(22=++ωξω 。
杜哈美积分x(t)= ⎰----tt t e xd )(g dd )(sin )(1ττωτωτξω , ωξωm cm k 2,2== 单自由度体系自由振动:)sin cos ()(d d000t x xt x e t x d t ωωξωωξω++=- 。
4、最大反应之间的关系:d v a S S S 2ωω==5、地震反应谱:单自由度体系在给定的地震作用下某个最大反应与体系自振周期的关系曲线。
特点:⑴阻尼比对反应谱影响很大;⑵对于加速度反应谱,当结构周期小于某个值时幅值随周期急剧增大,大于某个值时,快速下降;⑶对于速度反应谱,当结构周期小于某个值时幅值随周期增大,随后趋于常数;⑷对于位移反应谱,幅值随周期增大。
地震反应谱是现阶段计算地震作用的基础,通过它把随时程变化的地震作用转化为最大等效侧向力。
6、单自由度体系的水平地震作用:F G k G gt x t xS mgg g a αβ===maxmax)()(β为动力系数,k 为地震系数,α=k β为水平地震影响系数。
7、抗震设计反应谱αmax 地震影响系数最大值,查表;T 为结构周期;T g 为特征周期,查表;例:单层单跨框架。
屋盖刚度为无穷大,质量集中于屋盖处。
结构动力学-多自由度系统振动
k 2k
y1 y2
0 0
m
M
0
0
k
m, K k
k
2k
解:①由频率方程求固有频率
K 2M 0 k m2
k 0
k 2k m2
展开上式得:(k m2 )(2k m2 ) k 2 0
2 1, 2
3k m
9k 2m2 4k 2m2 2m2
1 0.62
k, m
2 1.62
M20 0
M 21
y2 0
M1y1
M11
列力平衡方程为:M11 M1y1 0 M11 M1 M 21 0, M 31 0
同样的分析可以求得:M12 0, M 22 M 2 , M 23 0; M13 0, M 23 0, M 33 M 3;
所以,得到质量矩阵为: M1 0 0
k2
k3
P
p1 (t) p2 (t)
二、柔度矩阵法 用柔度矩阵法或者刚度矩阵建立方程本质上也是基于力的 动平衡来建立方程,关键在于求柔度系数或刚度系数。
例题 3-2 梁的跨长为 l ,梁上有两个集中质量 M1 和 M 2 ,分别受 到集中力 p1 (t) 和 p2 (t) 的作用。不计梁自身的质量和阻尼,建立 系统的垂向振动方程.
上面的方程为惯性解耦,刚度耦合方程。
kij 的物理意义:j 坐标发生单位位移,其余坐标位移全部为
零时, i 坐标引起的恢复力。
mij 的物理意义:仅在 j 坐标发生单位加速度时,在第 i 坐标所产生 的惯性力.
用柔度矩阵法建立的一般方程:
Y (P MY)
两边同乘以 1
1Y 1(P MY)
例题:针对下图给出的系统,建立振动微分方程。
第三章 两自由度系统振动
d d( tq L j) q L jQ j - q D j (j 1 ,2 , ,n )
式D 中 1 2 C 1 x 1 2 1 2 C 2 (x 1-x 2)2 1 2 C 3 x 2 2
例题: 置于光滑平面的小车质量m1,车上质量为m2的圆柱体可作 无滑动的纯滚动。试建立该系统的运动微分方程。
两自由度与单自由度系统振动特性与分析方法的不同:
①两自由度振动系统具有两阶固有频率; ②两自由度振动系统引入主振型的概念,与系统的固
有频率一样,是系统本身的物理特性与固有特性, 与其初始条件无关。 ③一般情况下系统的振动是两种主振动的叠加,是一 种复杂的非周期运动。当满足一定条件时,系统才 作主振动。
(j1,2, ,n)
或
dd(tqLj)qLj 0 (j1,2, ,n)
(1)
其中,L=T-U称为拉格朗日函数。
2)当作用在系统上的主动力中,部分为有势力,部分 是非有势力,广义力Qj可分为两部分:
Qj Qj Q (j1,2,,n) 其中 Q是对应于非有 义势 力力 Q, j是 的对 广应于有势 广义力。 拉氏方程可写成
1
第三节 两自由度系统振动模型的建立
动力学系统振动模型的建立方法: 牛顿运动定律 定轴转动微分方程 能量法
一、拉氏方程的原理
在理想、完整约束条件下的n个自由度系统,选取广义坐 标为qj(j=1,2, ···,n),其运动可由如下拉格朗日方程来描述:
dT T d( tq j)qj Q j
取静x,平衡位置作为坐标原点,
进行受力分析,建立系统的运 动微分方程:
m1x K1(x r) I0 K1(xr)r K2r2
第三章 多自由度系统振动

U = U ( q1 , q2 ,..., qn )
通常将静平衡位置作为势能零点, 并且以静平衡 通常将静平衡位置作为势能零点, 位置为坐标原点。 位置为坐标原点。 我们研究的是在静平衡位置附 近的微振动, 近的微振动,则将 U 在静平衡位置作泰勒展开有
∂U U = U0 + ∑ i =1 ∂qi
0
q
对应的广义力,阻尼力,耗散力。 对应的广义力,阻尼力,耗散力。系统的第 k 个 质点受到的阻尼力
& Rk = − β k ⋅ rk
与势能形式上对应存在一个耗散函数
m n 1 ∂rk dqi n ∂rk dq j 1 & & Φ = ∑ β k ⋅ rk ⋅ rk = ∑ β k ⋅ ∑ ⋅ ⋅∑ ⋅ dt j =1 ∂q j dt k =1 2 k =1 2 i =1 ∂qi
kn 2 − mn 2ωi2 ) ⋅ ϕ 2i + ... + ( knn − mnnωi2 ) ⋅ ϕ ni = ( mn1ωi2 − kn1 ) ϕ1i (
n − 1 个方程,n − 1 未知数, 个方程, 未知数, 最终可求出 ϕ2i ,..., ϕni 用 ϕ1i
表示,其余都与其成一定比例。 表示,其余都与其成一定比例。 与其成一定比例
系统的能量等于各阶主振动的能量之和不同阶之间能量不发生变换每一阶主振动的动能和势能在内部交换总和保持常数34多自由度系统的受迫振动mxcxkx1特征值分析求出无阻尼的各阶固有频率和各阶主振型2模态叠加方法分解解耦期望阻尼阵也和mk一样具有正交性即如果这样就可以使用模态叠加法进行解耦分析求解
结 构 动 力 学
1 n n ∂ 2U U = ∑∑ 0 qi q j 2 i =1 j =1 ∂qi ∂q j , 令
3两自由度系统振动2
解方程,进一步可得如下的两个根:
ac ac c a b n 21,2 2 2
ac ac bc 2 2
2
n2
上式是决定系统频率的方程,并称为振动系统的特征 方程。
结论:两个自由度振动系统具有两个固有频率 ,这两个固有频率只与振动系统的质量和刚度 等参数有关,而与振动的初始条件无关。 n1 n2 将所求得的 和 代入(3.7)式中可得: 2 1 a n A 2 c 1 1 1 c n 21 b A1
上式就是机械振动系统在上述初始条件下的响应。
1x 10x 20 2 1 (2x10x20) ( 2 A(1) 1 2 1 n1 )
利用主坐标解耦的方法求解系统响应
的基本步骤为: (1)求出原振动方程的固有频率和振幅 比,得到振型矩阵;
(2)求出主坐标下的响应;
(3)利用反变换式得出原广义坐标下的 响应; (4)利用初始条件确定常系数。
上式为两自由度系统振动的微分方程。
图3.2,双质量-弹簧机械振动系统中,第一个方程中 包含 bx 2 项,第二个方程中则包含 cx 1 项,统称为 “耦合项”。
以上表明,质量 m1同不仅受到弹簧 k1的恢复力的作用,而 且受到弹簧k2 的恢复力的作用; m2只受一个弹簧 k2恢复力 的作用,还受到第一质点m1 位移的影响。位移之间有耦合 称为弹性耦合;加速度之间有耦合称为惯性耦合。
,
2
2
故机械振动系统的响应为:
x1 0.4cos x 0.4cos 2
(1)运动规律
k t 0.8cos1.581 m k t 0.4cos1.581 m
k t m k t m
力学中的弹簧振动与弹簧振子分析
弹簧振动在航空航天中的应用
01、
航空航天技术中的重要性
飞行器性能
安全性
02、 振动控制对飞行器性能的影响
振动优化 系统稳定性
03、
提高系统稳定性的方法
振动监测
技术创新
04、
弹簧振动的未来 发展趋势
弹簧振动理论在科技 发展中具有广阔前景, 未来的研究将聚焦于 创新和应用前景。弹 簧振动的持续发展将 为各行业带来更多机 遇和挑战。
02 生活质量
提高生产效率、改善环境舒适度
03 科技发展
推动科技创新、促进产业升级
弹簧振动的社会影响
01、
应用领域
汽车工程中的悬架系统优化 建筑设计中的结构抗震分析
航空航天中的振动控制技术
02、
生活质量
降低机械设备振动噪音,提高环境舒适度
提高生产效率,促进社会经济发展
03、
科技发展
引领智能制造和工业4.0发展
研究成果总结
01 理论探索
深入剖析弹簧振动规律
02 实验验证
通过实验数据验证理论模型
03 应用拓展
探索弹簧振动在工程领域中的应用
研究成果总结
01、
理论探索
从弹簧振动基本方程出发,推导出振动频 率和振幅的计算公式
探究材料特性对弹簧振动特性的影响
02、
实验验证
设计实验方案,测量不同弹簧参数下的振 动频率
第八章 参考文献
参考文献列表
弹簧振动理 论经典文献
探讨弹簧振动基 本原理
文献来源重 要性
引用文献的权威 性和可靠性
资料参考价 值
为进一步研究提 供参考
研究成果汇 总
总结弹簧振动领 域成果
两自由度系统的振动

振动理论与应用
Theory of Vibration with Applications Theory of Vibration with Applications
制作与设计 贾启芬
返回总目录
第3章 两自由度系统的振动
目录
3.1 两自由度系统的自由振动 3.2 拍振 3.3 坐标的耦联 3.4 两自由度系统的受迫振动
返回首页
3.1 两自由度系统的自由振动
例题
x m 0 &&1 2k 0 2m && + − k x2
m 0 质量矩阵 M = 0 2m
− k x1 0 x = 0 2k 2
自由振动微分方程
Theory of Vibration with Applications
返回首页
3.1 两自由度系统的自由振动
3.1.1 运动微分方程
m1 0
&& 0 x1 k 1 + k 2 x + − k m2 &&2 2
k 12 k 22
x1(2 ) = A1(2 ) sin( p2t + α 2 ) (2 ) (2 ) x2 = A2 sin( p2t + α 2 )
( A21) a − p12 c ν1 = (1) = = A1 b d − p12
第二主振动 the ratio of the amplitudes 振幅比
2 p1, 2
a+d a+d = m − (ad − bc) 2 2
2
a+d a−d = m + bc 2 2
多自由度(线性)阻尼系统振动讲义
第3章 多自由度线性系统的振动 3. 1 振动微分方程 3 多自由度线性系统的振动
例3.2 建立三自由度系统的振动微分方程
柔度系数:单位外力所引起的系统位移 ,定 义系统第j个坐标上作用的单位力在第i个广 义坐标上所引起的位移为柔度系数 h 。 ij
三自由度系统
在质量m 上施加单位力,质量m 、 m 和m 的位移: x =1/k , x =1/k , 1 1 2 3 1 1 2 1 x =1/k ,即h = h = k = 1/k ; 3 1 11 21 31 1 在质量m 上施加单位力,质量m 、 m 和m 的位移: x =1/k , 2 1 2 3 1 1 x =1/k +1/k , x = 1/k +1/k ,即柔度系数h = 1/k , h = k = 1/k +1/k ,; 2 1 2 3 1 2 12 1 22 32 1 2 在质量m 上施加单位力,质量m 、 m 和m 的位移: x =1/k , 3 1 2 3 1 1 x =1/k +1/k , x =1/k +1/k +1/k 。即柔度系数x =1/k , x =1/k +1/k , x = 2 1 2 3 1 2 3 1 1 2 1 2 3 1/k +1/k +1/k 。 1 2 é1 3 ù 1 1 振动 ê k m x ü k k ú é 1 0 0 ùì &&1 ü ì x ü ì 0 1 1 1 1 ï ê ú ê 0 m 0 ú ï && ï +ï x ï =ï0 1 1 + 1 x ý í 2 ý í ý 微分 ê 1 k 1 k + k 2 ú í 2 úê k k 1 1 2 1 2 ï ï ï ï ï ï 1 + 1 1 +1 + 1 ú ê 0 0 m ú î&&3 þ îx þ î0 3 û x 3 ë þ 方程 ê 1 ê k k k k k k ú 1 2 1 2 3 û ë 1
建筑结构抗震第3章-2

k21y1 + k22 y2 = m2 &&2 y
m m
2
y2 (t )
1
[m]{&&}+[k]{y} = {0} y
y = X1 sin( ωt +α) 设方程的特解为 1 y2 = X2 sin( ωt +α) k11X1 + k12 X2 mω2 X1 = 0 1
2.振型的正交性 振型的正交性 i振型上的惯性力在 振型上的惯性力在j 振型上的惯性力在 振型上作的虚功
W = ω {X} [m]{X}i ij
2 i T j
2 j
m m 1 2
X1i
mN
XNi
i振型 振型
X2i
m2ω2 X2 j j mω X1 j 1
mNω2 XNj j
j振型上的惯性力 振型上的惯性力 m m mN 1 2 在任一线性变形体系中, 在任一线性变形体系中,第一状态外力在第二状态 mωi2 X1i 1 2 X Nj X1 j 位移上所作的功等于第二状态外力在第一状态位移上所作 m ωi X2i 2 2 X2 j = ω j [m]{X}j 的功! 的功M ! j振型 振型
T T
( j =1 2,Ln) ,
3.求广义坐标; 3.求广义坐标; 求广义坐标
& & Dj (t) + ω Dj (t) =
2 j
P*(t) j M
* j
Pj* (t )
M* j
D j (t )
K* j
( j =1 2,Ln) ,
4.按下式求位移: 4.按下式求位移: 按下式求位移
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 0 2 n (km mn ) 11
由此可以求出n个自由振动频率。按其数值由小到大排列为 ω1ω2…ωn。其中最小频率称为基本频率。
二、柔度法
柔度法:由各质点运动的位移协调条件建立微分方程; 按照力法的概念求解: n 1 3 2 a. 确定体系的振动自 由度; b. 依次给予质点施加 f n1 f 11 f 31 f 21 一单位力。在此力 1 作用下,各质点产 生的位移。 f n2 f 12 f 32 f 22 如质点受力: i y 惯性力: mi 1
一、刚度法
同理,体系中的每一个质点都可以列出相应的动力平衡方程 式,即用刚度法推导的多自由度体系自由振动时的运动微分 方程式。 m k y k y k y 0 y
2 k21 y1 k22 y2 k2n yn 0 m2 y n kn1 y1 kn2 y2 knn yn 0 mn y
1 f12 m2 2 f1n mn n y1 0 f11 m1 y y y 1 f 22 m2 2 f 2 n mn n y 2 0 f 21 m1 y y y 1 f n 2 m2 2 f nn mn n y n 0 f n1 m1 y y y
第三节 多自由度体系的振动
1. 2.
运动微分方程式的建立及求解 振型向量的概念 ;
3.
自由振动频率和振型计算示例 ;
3.1 运动微分方程式的建立及求解 一、刚度法
刚度法:由各质点力的平衡条件建立运动微分方程;
按照位移法的概念求解:
a. 对体系所有的独立位
1
2
3
n
移都施加相应的约束;
1
K21 K31 Kn1 K11
KY 0 MY
方程特解:
KY 0 将Y 代入方程 : MY 即: 2MX sin( t ) KX sin( t ) 0 则: (K 2M )X 0
这是一组X的线性齐次方程式组。欲使振幅向量X存在非零 解,即体系发生振动,则必须有: K 2M 0 这个方程称为频率方程,未知量为频率ω。将上式展开为: 2 ( k ) k m1 0 k1n k11n 11 m 12 k11 k12 2 2 k 21 ( k mm k k21 k22 k 21 11 2 )2 21
b. 依次给予约束一单位位 移。在此位移影响下, 其它约束均产生反力。
如质点1受力: 惯性力: m1 1 y
1
K12 K22 K32 Kn2
(
各约束的反力: k1i yi
约束是虚设的,这些反力之和应为零。质点1的平衡方程式为:
1 k11 y1 k12 y2 k1n yn 0 m1 y
写成矩阵形式为:
f11 f 21 f n1 f12 f1n f 22 f1n f n 2 f nn 1 1 0 y 0 y1 m1 1 y 2 m2 y 2 0 0 m y 0 1 n yn n
也可以写成:
KY 0 MY
一、刚度法
设微分方程式的特解为:
y1 X (1) y X (2) 2 t ) sin( X (n) yn
各质点按同一频率同一位相 作简谐振动。可写成 :
1 1 11 1 12 2 1n n
写成矩阵形式为:
m1 0 m2 0 mn 1 k11 y k y 2 21 y n k n1 k12 k 22 kn2 k1n k 2n k nn y1 y 2 0 yn
ห้องสมุดไป่ตู้
1 fi2m2 2 finmn n y y i点位移: yi fi1m 1y 1 fi2m2 2 finmn n yi 0 y y y 即: fi1m1
二、柔度法
同理,体系中的每一个质点都可以列出相应的动力位移方程 式,即用柔度法多自由度体系自由振动时的运动微分方程式。
Y X sin( t )
X 称为体系的振幅向量:
ω—体系自由振动时的圆频率,简称为频率或自振频率。
m1 0 m2 0 mn 1 k11 y k y 2 21 y n k n1 k12 k 22 kn2 k1n k 2n k nn y1 y 2 0 yn
y1 X (1) y X (2) 2 t ) sin( X (n) yn
t ) 即 :Y X sin(
knn 0 kn1 kn2 k k n1 n2