控制理论chapter 5
自动控制理论词汇表

Glossary for Feedback Control of Dynamic Systems自动控制理论词汇表Chapter 1thermostat n.恒温器predictive control 预测控制power generation plant 发电厂micron n.微米cell phone 移动电话jumbo jet 巨型喷气式客机block diagram 方框图actuator 执行机构process n.过程feedback n.反馈plant n.被控对象mph=mile per houropen-loop 开环closed-loop 闭环throttle n.油门gain n.增益orifice n.孔、小孔controlled variable 被控变量error n.误差incubator n.孵化器flue n.烟道chronicle n.编年史、年代记录conical a.圆锥体的mill wright 技工、造水车工匠inertia n.惯性、惯量oscillate about…在….周围振荡reference input 参考输入prescribed direction 预定的方向actual direction 实际方向flyball n.飞球governor n.控制器、调节器、总督、省长equilibrium n平衡点differencial equation 微分方程characteristicequation 特征方程third-order 三阶polynomial n.多项式state variable 状态变量distortion n.畸变complex variable 复变量methdology n.方法论proportional a. 比例的、成比例的integral a.积分的derivative a.微分的stochastic a.随机的servomechanism n.伺服机构calculus n.微积分ubiquitous a.到处存在的、普遍存在的radar-tracking 雷达跟踪SISO systems 单输入单输出系统Laplace transform 拉普拉斯变换pole n.极点zero n.零点transfer function传递函数trajectory optimization 轨迹优化root locus 根轨迹specifications n.指标、规格、规范discrete-data 离散数据sampled-data 采样数据performance n.性能Chapter 2desired reference variable 期望参考变量prototype n.原型system identification 系统辨识time response 时域响应step input 阶跃输入defer n.推迟、延期vector n.向量、矢量slug n.斯(勒格),质量单位(32.2磅)impart n.赋予、传授、告知heavy line 粗实线dashed line 虚线coordinate n.坐标numerator n.分子denominator n.分母suspension n.悬架、悬挂deflection n.偏移、偏转、偏差displacement n.位移shock absorber 减震器、缓冲器dashpot n.缓冲器bump n. vt.颠簸bounce n. vt.反弹、跳跃moment of inertia 转动惯量、惯性矩attitude n.姿态、姿势antenna n.天线perpendicular n.垂直线 a.垂直的asymmetry a.不对称的torque n.转矩resonant n.谐振、共振damper n.阻尼器prudent a.谨慎的,有远见的,精打细算的anti-alias 抗混频operational amplifer 运算放大器passive circuit 无源电路Kirchhoff’s current law 基尔霍夫电流定律algebraic sum 代数和summer n.加法器integrator n.积分器tesla n.特斯拉(磁通量单位)louderspeaker n.扬声器bobbin线轴,线筒stator n.定子rotor n.转子back emf 反电势maze n.曲径,迷宫specific heat 比热spatially ad.空间地hydraulic a.液压的、水力学的gimbal n.平衡环,万向接头nozzle n.喷嘴grooming n.修饰,美容piston n.活塞porous a.可渗透的,多孔的laminar a.多层的、层流的n.层流turbulent a.湍流的Chapter 3linear time-invariant systems 线性时不变(定常)系统signal flow graph 信号流图simulation n.仿真frequency-response 频率响应superposition n.叠加convolution n.卷积inpulse-response 脉冲响应unit step function 单位阶跃函数root-locus 根轨迹stability properties 稳定性特性principles linear algebra 线性代数原理state variable methods 状态变量法matrix n..矩阵nonlinear n.非线性mathematical mode 数学模型trivial a.琐碎的、不重要的linearize vt.线性化operating point 工作点state-space 状态空间partial differential equations 偏微分方程equilibrium n.平衡点complex frequency variables 复频率变量zero initial conditions 零初始条件steady-state 稳态ramp input 斜坡输入dc gain 直流增益inverse Laplace transform 逆拉氏变换partial fraction expansion 部分分式展开rantional a.有理的residue n.余式unilateral a.单边的convergence n.收敛final-value theorem 终值定理homogeneous differential equation 齐次微分方程ordinary differential equation 常微分方程overall transfer function 总的传递函数“loading” effect 负载效应cascade blocks 方框串联(级联)to reduce 化简eliminating 消去equivalent a.等效的simplification n.化简、简化integrodifferential a.积分-微分的time constant 时间常数imaginary axis 虚轴damping ratio n.阻尼比natural undamped frequency 自然无阻尼频率overdamped a.过阻尼critically damped n.临界阻尼rectangular coordinate 直角坐标oscillatory a.振荡的transient response 瞬态响应overshoot n.超调量delay time 延迟时间peak time 峰值时间rise time 上升时间settling time 调节时间steady state 稳态characteristic equation 特征方程RHP(Right Half-Plane) 右半平面elevator n.飞机升降舵,飞机升降仪,电梯nonminimum-phase 非最小相位diverge v.发散、分歧asymptotically stable 渐进稳定stability n.稳定性absolute stability 绝对稳定性relative stability 相对稳定性stability criterion 稳定性判据equilibrium state 平衡状态product n.乘积coefficient n..系数nagtive feedback 负反馈positive feedback 正反馈unity feedback system 单位负反馈系统reduction n.化简simultaneous a.联立的common factor 公因子expedient a.权宜的,有用的attenuate v.变弱,衰减,变细,变薄,稀释cofactor n.公因子Routh stability criterion 劳斯稳定性判据determinant n. 行列式tune v.调节retune v.再调节pseudorandom-noise 伪随机噪声signal-to-noise ratio 信-噪比Mason Gain Formula 梅森(增益)公式term n.术语signal flow graph 信号流图nodepathenvelope n.包络线dominant root 主导极点Chapter 4steady-state 稳态with respect to 关于….deviation n.偏离steady-state error 稳态误差load torque 负载转矩viscous friction 粘性摩擦repeater n.中继器drift v.漂移fidelity n.准确性,忠实,忠诚parabolic antenna 抛物线天线position error constant. 位置误差常数velocity error constant 速度误差常数robust property 鲁棒性shaft n.轴tachometer n.转速计inductance n.电感sampled v.采样quantized v.量化extrapolate v.预测,推测trapezoid n.梯形,不等边四边形vertices n.顶点order n.阶次,数量级proportional control 比例控制derivative control 微分控制sinusoidal a.正弦parameter n.参数Chapter 5root-locus method 根轨迹法monic a.首一的feedforward a.前向的denominator n.分母numerator n.分子quadratic n.二次项branch n.分支factored a.分解的asymptote vt.渐进n.渐进线division n.除法vantage point 有利地位,观点imaginary part 虚部breakaway point 分离点common denominator 公分母conjugate pairs 共扼对multiplicity n.多重,多数trial and error 凑试(法)spirule n.螺旋尺intersection n.交汇symmetrical a.对称的magnitude condition 幅值条件angle condition 相角条件phase condition 相角条件origin n.起始点terminus n.终点angle of departure 分离角、出发角angle of arrival汇合角、到达角cubic a.三阶的、立方的quartic a.四次的remainder n.留数、余数remainder theorem 留数定理taking the limit 取…极限synthetic division 综合除法dominant root 主导根compensator n.补偿器azimuth n.地位角、地平经度inertial guidance 惯性导航constant term 常数项symmetrical with respect to 关于…对称trial point 试验点terminate vt.终止于first differentiate 一阶微分real parts实部imaginary part 虚部lag compensator 滞后补偿器lead compensator 超前补偿器spill over 溢出,无法容纳autopilot n.自动导航trim v.n.使整齐,微调trim tab 平衡调整片margin n.裕量iteration n.重复、循环、迭代intact a.完好无缺的,原封不动的Chapter 6frequency response 频率响应rendered v.使成为,提供,报答,着色; 执行ratio of the magnitudes 幅值比bandwidth n.带宽resonant peak 谐振峰值low-pass filter低通滤波器sanity n.神智健全,头脑清楚,健全tangent n.正切、切线reciprocal a.互补的,相互的,互惠的phase difference 相角差transport lag 传输延迟irrational factor 非有理因子phase shift 相位移动moduli n.模(复数)poke vt.戳、刺、捅drudgery n.苦工、单调乏味的工作logarithmic coordinate 对数坐标semilog n.半对数decibel n.分贝decade n.十倍量程octave n.八倍频程、八度、八阶asymptotic behavior 渐进行为dotted n.虚线break frequency 转折频率corner frequency 转折频率slope n.斜率20dB/decade 20分贝/十倍频程superimpose vt.迭加polar plot 极坐标图pass function 旁路函数servomotor-amplifier 伺服电机-放大器angular velocity 角速度minimum phase 最小相位tilt angle 倾斜角lateral force 侧面力、横向力perceived velocity 可察觉的速度croseover frequency 穿越频率appendage n.附件、备件Nyquist criterion 奈奎斯特判据Semi-graphical 半图形Nyquist plot 奈奎斯特图Bode diagram 伯德图positive real part 正实部necessary and sufficient condition 充分必要条件left half of the s-plane s平面左半平面formidable a. 可怕的、令人生畏的determinant 行列式pole-zero cancellation 零极点相消rational functions 有理函数quotient n. 商、份额multi-loop control system 多环控制系统encircled vt. 环绕enclosed vt. 包围closed path 闭合路径counterclockwise a.逆时针的clockwise a.顺时针的encirclement n. 环绕enclosure n. 包围contour n.围线,轮廓线argument principle 幅角原理complex variable 复变量single-valued rational function 单值有理函数analytic a.解析的Nyquist path 奈奎斯特路径singularity n.奇异(点、值)semicircle n.半圆artifice n.技巧、技能gain margin 增益裕量phase margin 相角裕量vicinity n.邻近compromise n.折中,妥协trapezoidal a.梯形的iterate v.重复、循环、迭代bracket v.放在括号内,归入一类,包含octave n.八个一组的事物,八度enumerate v.数,点detrimental a.有害的,不利的threshold n.阈值Chapter 8sampling n.采样sample period 采样周期aliasing n.混频,别名inherent a.内在的z transform Z变换radar tracking system 雷达跟踪系统discrete period 离散周期discrete equivalent 离散等效digitization n.数字化recursive a.递归的,循环的difference equation 差分方程sample rate 采样速率sampler 采样器zero-order holder 零阶保持器inverse Z transform 反Z变换、逆Z变换long division 长除法unit circle 单位圆overlap n.重叠rephrase v.重新措辞,改述extrapolate v.预测,推测alleviate v.减轻,使 ... 缓和judicious a.明智的,贤明的,审慎的fictitious a.假想的,虚伪的impulse transfer function 脉冲传递函数piecewise-continuous 分段连续的pseudo-continuous-time 准连续时间Pade approximation Pade 近似Fourier analysis 傅立叶分析modulation n.调制Fourier transform 傅立叶变换spurious a.寄生的、伪的、假的ideal sampler 理想采样器impulse train 脉冲列、脉冲串transcendental a.超自然的、超常的rational function 有理函数closed form 封闭形式degree n.阶denominator n 分母numerator n 分子initial value 初始值identical a.相等的starred a.打星号的impulse response transfer function 脉冲响应传递函数uniformly spaced 均匀分布map into 影射、映射circles of radius 圆弧multiple-sheeted surfaceRiemann surface 黎曼曲面radial ray 射线by virtue of 借助、凭借、依靠….(的力量)logarithmic spiral 对数螺旋intersection n.相交power series 幂级数sampling instant 采样时刻natural logarithm 自然对数rationalizing 有理化cascading property 串联(级联)特性attenuation factor 衰减因子warp vt.使弯曲、使变形tune vt.调节、调整cross-hatched vt.用交叉线画出(图画上)阴影performance specification 性能指标trial-and-error approach 试凑法bilinear n.双线性Chapter 9equilibrium point 平衡点neighborhood n.邻域saturate n.饱和robotic n.机器人学heuristic a.启发式的,搜索式的sinusoidal a.正弦的sinusoid n.正弦harmonic a.谐波的describing-function 描述函数static nonlinearity 静态非线性dynamic nonlinearity. 动态非线性periodic response 周期响应phase-plane 相平面catastrophe n.灾难、浩劫shaky a.不稳定的,不可靠的scalar function 标量函数Liapunov function 李亚普诺夫函数linearization n.线性化inverse nonlinearity 可逆非线性perturbation n.摄动operating point 工作点eigenvalue n.特征值bearing n.轴承levitate v.浮动,使漂浮,使悬浮turbo n.汽轮机deviation n.偏差rigid link 刚性连接regime n.情形,体制dead-zone 死区viscous friction 粘性摩擦coulomb friction 库仑摩擦relay n.继电(特性)limit cycle 极限环deflect v.使偏,使歪windup n.终结,结束akin a.同类的,相似的odd function 奇函数backlash n.齿轮间隙magnetic hysteresis 磁滞coincident a.重合的,一致的on/off system 通断(控制)系统superposition n. 迭加sub-harmonic a.谐波的magnetic flux 磁通iron-cored coil 铁芯线圈stiction n. 静摩擦力autonomous a.自治的hypersphere n. 超球stability in the sense of Liapunov 李亚普诺夫意义下的稳定性asymptotically stable 渐进稳定monotonically stable 单调稳定origin n. 原点globally stable 全局稳定locally stable 局部稳定electronic oscillator 电子谐振器Van der Pol’s differential equation 范德波尔微分方程nonsinusoidal waveform 非正弦波形rated voltage 额定电压phase variable 相变量phase portrait 相图perpendicular a. 垂直的、正交的、成直角的Taylor series 泰勒级数increment n.增量Euler method 欧拉法singular point 奇异点。
自动控制原理及应用

通过频率域中的系统传递函数分析系统的性能,包括幅值裕度、相位裕度等指标。
时域分析法
1
2
3
通过绘制根轨迹图来设计控制系统,确定控制器参数。
根轨迹法
通过频率域分析来确定控制系统参数,包括幅值裕度和相位裕度等。
频率法
通过建立系统的状态空间模型来进行系统分析和设计。
状态空间法
03
CHAPTER
03
02
01
05
CHAPTER
自动控制面临的挑战与未来发展
总结词
随着系统的日益复杂化,如何实现精确、稳定、高效的复杂系统控制已成为自动控制领域的重要挑战。
要点一
要点二
详细描述
复杂系统控制的研究涉及多个领域,包括非线性控制、时变控制、多变量控制等。现代控制理论和方法的发展为解决这些复杂系统的控制问题提供了有效手段。
总结词
自适应控制是自动控制领域的重要分支,能够有效地处理系统参数不确定或变化的情况。
详细描述
自适应控制算法的设计和应用涵盖了各种领域,如航空航天、机器人、工业过程控制等。通过实时调整控制策略,自适应控制系统能够适应环境变化,提高系统的鲁棒性和适应性。
总结词
分布式控制系统具有高可靠性、可扩展性和灵活性,是实现大规模、复杂系统控制的有效途径。
自动控制的应用实例
温度控制系统是自动控制原理在工业和日常生活中的应用之一,其实现方式主要包括温度传感器、控制器和执行器。
总结词
温度控制系统是通过温度传感器监测温度,将温度信号转换为电信号传递给控制器,控制器根据预设的温度值和当前温度值的差异,输出控制信号给执行器,执行器根据控制信号调节加热或冷却设备,以实现温度的自动控制。
详细描述
自动控制原理_胡寿松_第五版_第一章_绪论(简)改ppt
掌握系统的基本分析方法
为设计自动控制系统打下一定的基础 为进一步的学习和研究控制理论创造条件
教学方式:讲授 学时:48 H 考核方式: 笔试70% 平时30%:作业(20%),课堂(10%) 教材: 胡寿松主编,《自动控制原理基础教程》第三版,科学 出版社 参考书: 李友善主编,《自动控制原理》,国防科技出版社 高国燊主编,《自动控制原理》,华南理工大学出版社 文锋主编,《自动控制理论》,中国电力出版社 目标:学到真本事,考个好成绩! 要求:认真听课,不能无故旷课、迟到;独立完成作业,能够提 出问题,讨论问题。 即:严肃认真,生动活泼!
前苏联发射“月球”9号探测器,首次在月面软着 陆成功(1966),三年后(1969),美国“阿波罗”11号 把宇航员N. A. Armstrong 送上月球。
第一台火星探测器Sojourner在火星表面软着陆(1996)。
旅行者Voyager 一号,二号开始走出太阳系, 对茫茫太空进行探索。
控制论是一门多学科性的技术科学。在理论研究中,广 泛的使用了各种数学工具:微积分,概率论,复变函数,泛 函,变分法,拓扑学等,实际上是数学的一个分支。
信号与系统(含 拉氏变换,傅氏 变换、z变换
复变函数
电路理论
模拟电子技术
电机与拖动
自动控制理论
线性代数 微积分(含微分方程)
大学物理(力学、热力学)
我们讨论的自控原理,仅仅是控制论的一个小部分,只讨论 了控制系统分析和设计的最一般的理论。属于经典控制部分。
Chapter 1: 主要介绍自动控制的基本概念,控制系统的常用术语及方框图表示; 主要内容: 1.自动控制、自动控制系统的概念 2.自动控制系统的基本方式 3.自动控制系统的类型 4.自动控制系统的要求和分析设计 chapter 2: 如何建立系统的数学模型(定量分析的基础),着重讨论对传递 函数的分析和基于方框图、梅逊公式的数学模型的简化方法;
(运筹学与控制论专业优秀论文)一类最优化问题的算法设计

知识水坝为您提供优质论文
承诺书
本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立 进行研究工作所取得的成果。尽我所知,除文中已经注明引用的内容 外,本学位论文的研究成果不包含任何他人享有著作权的内容。对本 论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明 确方式标明。
本人授权南京航空航天大学可以有权保留送交论文的复印件,允 许论文被查阅和借阅,可以将学位论文的全部或部分内容编入有关数 据库进行检索,可以采用影印、缩印或其他复制手段保存论文。
1.3 本文的主要内容
本文主要研究一类具有特殊形式的最优化问题,求解这一类最优化问题的全 局最优解,并应用到求解互补问题上。虽然目前已经有很多算法,但是我们考虑 到本最优化问题的约束条件是特殊的,因此可以利用约束条件的特殊性构造更为 简单有效的算法。
本文提出了一类新的函数,将它定义为半正定函数。利用这类函数将原问题; 分别转化为无约束最优化和含等式约束的最优化问,并分别设计了算法,进行了 数值实验,验证了算法的有效性。为了给出问题的全局最优解,我们又研究了算 法子问题的全局最优化算法,利用填充函数法来求解子问题。这样就保证了前面 设计的算法可以求得问题的全局最优解。最后,针对约束最优化问题(P),提出 了拟填充函数的概念,构造了一类拟填充函数并设计了算法。具体内容如下:
In this article we propose a new type of function, which is called a semi-positive function. We use this function to make another function, then we can turn the original problem into another one. We give algorithms and numerical results. Then we investigate the sub-problem. Also we propose the definition of quasi-filled function. We propose a quasi-filled function and design algorithm. It mainly contains the following six chapters:
现代控制理论Modern Control Theory

c(t)
s(s 1)(4s 1)
试分析系统的稳定性
解 非线性环节为库仑摩擦加黏性摩擦
查表得描述函数 N ( A) K 4M
Chapter 8 Analysis and design of nonlinear system
非线性系统的分析与设计
2
The Principle of Automatic Control 2008
第八章、非线性控制系统分析
8.1 非线性控制系统概述 8.2 相平面法 8.3 描述函数法 8.4 改善非线性系统性能的措施及非线性特
8.1 非线性控制系统概述
8.1.3 非线性系统运动的特殊性
• 不满足叠加原理— 线性系统理论原则上不能运用
• 稳定性问题 — 不仅与自身结构参数,且与输 入,初条件有关,平衡点可能不惟一
• 自振运动
— 非线性系统特有的运动形式
没有外界周期变化信号的作用时,系统内产生的具 有固定振幅和频率的稳定周期运动,简称自振
性的利用(稳定性判别)
3
The Principle of Automatic Control 2008
8.1 非线性控制系统概述
8.1.1 非线性现象的普遍性
非线性是宇宙间的普遍规律 非线性系统的运动形式多样,种类繁多 线性系统只是在特定条件下的近似描述
E.g. 欧姆定律U=IR
4
The Principle of Automatic Control 2008
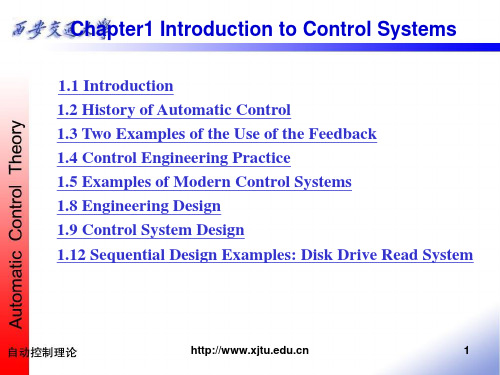
j
G( j)
1 N ( A)
1 N ( A)
0
当гG曲线包围
1 N ( A)
,系统不稳定
当гG曲线不包围 N (1A),系统稳定
25
The Principle of Automatic Control 2008
第二章 内部控制的基本理论

Chapter2 内部控制的基本理论
15
内 部 控 制
(二)具体要求 全过程控制; 1、全过程控制;2、全员控制 三、重要性原则 坚持全面控制的基础上突出重点。 存货ABC ABC管 坚持全面控制的基础上突出重点。(存货ABC管 理) 四、有效性原则 要求设计的内部控制具有预防作用; 设计的内部控制具有预防作用 1、要求设计的内部控制具有预防作用; 要求定期检查内部控制执行情况, 执行情况 2、要求定期检查内部控制执行情况,及时纠偏。
一、早期的内部控制假设(略) 早期的内部控制假设( 假设的基本特征( 二、假设的基本特征(略) (一)客观现实性 (二)基础性 (三)系统性 (四)相互独立性 (五)动态性
Chapter2 内部控制的基本理论
6
内 部 控 制
三、控制实体假设——与会计主体假设比较 控制实体假设 与会计主体假设比较 1、含义 控制实体假设是对内部控制活动空间范围 控制实体假设是对内部控制活动空间范围 所作的限定。 所作的限定。 2、作用 有利于明确责任主体和控制对象, 有利于明确责任主体和控制对象,进行绩 效考核。 效考核。
Chapter2 内部控制的基本理论
11
内 部 控 制
2、作用 要求在设计内部控制时, 要求在设计内部控制时,应谨遵权力制衡 原则,重视不相容岗位和职务的识别和分离, 原则,重视不相容岗位和职务的识别和分离, 重视权责的分配。 重视权责的分配。
Chapter2 内部控制的基本理论
12
内 部 控 制
例1:控制实体假设是对内部控制活动空间范围 所作的限定。 所作的限定。该假设有利于明确责任主体和控 制对象,进行绩效考核。() 制对象,进行绩效考核。() 2:可控性假设假定对象是可控的 可控性假设假定对象是可控的。() 例2:可控性假设假定对象是可控的。() 复杂人性假设认为,人是有限理性的, 例3:复杂人性假设认为,人是有限理性的,具 有双重人格。() 有双重人格。() 不串通假设认为,除非存在反证, 例4:不串通假设认为,除非存在反证,任何控 制实体的相关人员都不会合谋。() 制实体的相关人员都不会合谋。()
现代控制理论精品ppt课件(英文版)Chapter

2) Observable canonical form
SISO system
Then the system is called observable canonical form
Theorem: if system (A, B, C) is completely observable, then
Observabiltiy Criterion:
1) For any LTI continuous system with m dimension output
The necessary and sufficient condition of system being completely observable is
1) Controllability structure decomposition
Theorem: if the n-dimension LTI system (A, B, C) is not completely controllable
then there exists a nonsingular linear transform system to be
1. Calculate matrix
2. Calculate invert of 3. Set 4. Calculate 5. Observable canonical form
• 5. System structure decomposition
If the LTI system is not completely controllable or observable.
2) If the system has distinct eigenvalue
5.状态反馈控制器的设计
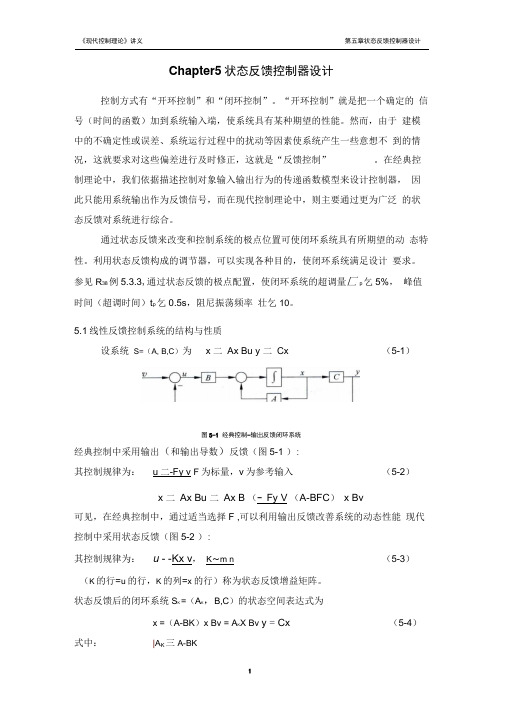
Chapter5状态反馈控制器设计控制方式有“开环控制”和“闭环控制”。
“开环控制”就是把一个确定的信号(时间的函数)加到系统输入端,使系统具有某种期望的性能。
然而,由于建模中的不确定性或误差、系统运行过程中的扰动等因素使系统产生一些意想不到的情况,这就要求对这些偏差进行及时修正,这就是“反馈控制”。
在经典控制理论中,我们依据描述控制对象输入输出行为的传递函数模型来设计控制器,因此只能用系统输出作为反馈信号,而在现代控制理论中,则主要通过更为广泛的状态反馈对系统进行综合。
通过状态反馈来改变和控制系统的极点位置可使闭环系统具有所期望的动态特性。
利用状态反馈构成的调节器,可以实现各种目的,使闭环系统满足设计要求。
参见R38例5.3.3,通过状态反馈的极点配置,使闭环系统的超调量匚p乞5%,峰值时间(超调时间)t p乞0.5s,阻尼振荡频率壮乞10。
5.1线性反馈控制系统的结构与性质设系统S=(A, B,C)为x 二Ax Bu y 二Cx (5-1)图5-1 经典控制-输岀反馈闭环系统经典控制中采用输出(和输出导数)反馈(图5-1 ):其控制规律为:u二-Fy v F为标量,v为参考输入(5-2)x 二Ax Bu 二Ax B (- Fy V (A-BFC)x Bv可见,在经典控制中,通过适当选择F ,可以利用输出反馈改善系统的动态性能现代控制中采用状态反馈(图5-2 ):其控制规律为:u - -Kx v,K〜m n (5-3)(K的行=u的行,K的列=x的行)称为状态反馈增益矩阵。
状态反馈后的闭环系统S K =(A K,B,C)的状态空间表达式为x =(A-BK)x Bv = A K X Bv y = Cx (5-4)式中:|A K三A-BK若K -FC ,“状态反馈”退化成“输出反馈”,表明“输出反馈”只是“状态反馈”的一种特例,因此,在经典控制理论中的输出反馈”(比例控制P )和 输出导数反馈”(微分控制D )能实现的任务,状态反馈必能实现,反之则未必。
现代控制理论全套课件

Modern Control Theory
L01
绪论
绪论
控制理论的发展历程
经典控制理论
形成和发展
在20世纪30-40年代,初步形成。 在20世纪40年代形成体系。 频率理论 根轨迹法
以SISO线性定常系统为研究对象。 以拉氏变换为工具,以传递函数为基础在频率域中分析 与设计。 经典控制理论的局限性
1970——1980 大系统理论 控制管理综合 1980——1990 智能控制理论 智能自动化 1990——21c 集成控制理论 网络控制自动化 专家系统,模糊控制,人工智能 神经网络,人脑模型,遗传算法
Soft computing
控制理论与计算机技术相结合→计算机控制技术
Modern Control Theory
Modern Control Theory
L01
绪论
网络交流
注册方法: 向以下邮件地址发邮件,会得到一封自动回复的 邮件,按邮件提示,进行简单填写,提交,然后 等候批准。获得批准后即可加入社区,参加社区 活动。
ModernControlTheory-subscribe@
定义
所谓自动化是指机器或装置在无人干预的情况下按规定 的程序或指令自动的进行操作或运行。广义地讲,自动 化还包括模拟或再现人的智能活动。
Definition
The art of making processes or machines self-acting or self-moving. Also pertains to the technique of making a device, machine, process or procedure more fully automatic.
Modern_Control_Systems_Chapter
5
1.1 Introduction
Multivariable control system
6
1.2 History of Automatic Control
The first applications of feedback control appeared in the development of float regulator mechanisms in Greece in the period 300 to 1.B.C. The first feedback system to be invented in modern Europe was the temperature regulator of Cornelis Drebbel (1572~1633) of Holland. The first automatic feedback controller used in an industrial process is generally agreed to be James Watt’s flyball governor, developed in 1769 for controlling the speed of a steam engine. The first historical feedback system, claimed by Russia, is the water-level float regulator said to have been invented by I.Polzunov in 1765.
An important factor: Time
16
1.8 Engineering Design
The design of technical systems rests on four characteristics: 1. Complexity 2. Trade-offs 3. Design gaps 4. Risk Two kinds of thinking: engineering analysis and synthesis. The main approach to the most effective design: parameter analysis and optimization.
现代控制理论课件chapter2
Modern Control Theory
L06
Chapter 2 State Space Analysis of Control Systems
2.1 线性定常系统齐次状态方程的解
矩阵指数法
(t ) Ax(t ), 对应于 t 的同次幂系数相等 x
1 1 2 1 2 b1 Ab0 ,2b2 Ab1 b2 Ab1 A b0 A b0 2 2 2! 1 1 1 3 3 3b3 Ab2 b3 Ab2 A b0 A b0, , b0 x(0) 3 3 2! 3! 1 k bk A b0 k!
Modern Control Theory
L06
Chapter 2 State Space Analysis of Control Systems
2.1 线性定常系统齐次状态方程的解
矩阵指数法
1 2 2 1 k k 所以 x(t ) [ I At A t A t ]x(0) 2! k! 1 2 2 1 k k 因为 e 1 at a t a t 2! k!
2.2状态转移矩阵
转移矩阵的计算
Modern Control Theory
2.1 线性定常系统齐次状态 方程的解 (自由解)
L06
Chapter 2 State Space Analysis of Control Systems
2.1 线性定常系统齐次状态方程的解
定义:自由解 矩阵指数法 拉氏变换法
为一阶齐次微分方程组。
自由解:系统在没有输入的情况下,由初始状 态引起的自由运动。
Modern Control Theory
管理导论ppt课件

总结:管理者的职责
管理者是在组织中从事管理工作并对此负责的人。管理者拥有指挥下属的特权,但也负有要对下属的工作承担责任的额外责任。 无论管理者在组织中的地位如何,其所担负的基本任务是一样的,即:设计和维护一种环境,使身处其间的人们能在组织内协调地工作,以充分发挥组织的力量,从而有效地实现组织的目标。
本章思考题
1、一个有效的管理者需要扮演哪些角色?需要具备哪些素质和技能?2、如何理解管理的二重性。3、管理活动具有哪些基本职能?它们之间的关系是什么?4、什么是概念技能?它对高层管理人员履行其职责的意义是什么?5、讨论下列论题:所有的企业家都是管理者,但所有的管理者不都是企业家。
课外学习指导
彭博商业周刊哈佛商业论坛管理学 斯蒂芬.P.罗宾斯管理学基础—概念、应用与技能提高
管理学原理
课程简要说明
平时分数构成
课堂纪律20%(100分记,迟到一次扣5分,缺勤一次扣20分)课后选做作业20%(100分记,完成一次得10分)团队表现60%(100分记,由组长确定分数分配)
团队分数样表
学号
姓名
贡献
参与
得分
分组依据理导论Chapter2 管理理论的形成与发展Chapter3 决策Chapter4 计划Chapter5 组织设计Chapter6 组织变革与创新Chapter7 人员配备Chapter8 领导Chapter9 激励Chapter10 管理沟通Chapter11 控制
(3)管理者的角色人际角色(interpersonal roles)信息角色(information-related roles)决策角色(decision-making roles)
1.2.2 管理者
(4)管理者的技能技术技能(technical skills)人际技能(human relation skills)概念技能(conceptual skills)
运动技能的学习与控制

•什么是协调?•描述运动模式的常用方法是什么?•什么是自由度?•简述运动控制的两个系统,两者的异同。
•3、简述动作程序为基础的动作控制理论,试着举例说明。
•固有特征•参数定义并举例说明动力模式理论的关键术语:指令参数,控制参数和协调结构。
5、讨论动作程序为基础的理论和动力模式理论是如何解释走和跑的步态中相对时间特征。
相对时间•动作程序为基础的理论•---固有特征•总时间---参数•动力模式理论•----控制参数---运动频率(速度)•节律性运动的相对位相---指令参数第五章复杂技能的表现特征Performance Characteristics ofComplex SkillsStudy goal of this chapter •1. Describe Fitts’law and explain how it relates to the speed-accuracy trade-off phenomenon.•2. Define the term prehension, describe a prehension a example, and discuss, from a motor control perspective, the relationship among the components of a prehension action.e•3、Describe how handwriting provides a good example of the concept of motor equivalence.•4. Describe the difference between symmetric and asymmetric bimanual coordination,and discuss why asymmetric bimanual coordination is more difficult to maintain than symmetric.•5. Describe the rhythmic relationships associated with walking and running gait patterns, the role of maintaining head stability during locomotion, and the characteristics associated with gait transitions that occur at certain speeds of locomotion应用•1、网球班的初学者不能协调抛球和挥拍这两个动作。
面向任务感知的无人机预测控制研究

面向任务感知的无人机预测控制研究Chapter 1. Introduction随着无人机技术的不断发展,无人机在各个领域得到了广泛的应用,如军事、民用、科研等。
然而,无人机的控制一直是无人机技术研究的难点和重点。
早期的无人机控制主要依靠人工控制或者预设轨迹控制,这种控制方式无法适应现代飞行任务的多样性和复杂性。
因此,越来越多的无人机任务需要采用面向任务感知的无人机预测控制策略。
本文分析了面向任务感知的无人机预测控制的基本概念,并对其最新研究进展进行了综述。
Chapter 2. 基本概念和理论2.1 任务感知任务感知是无人机控制的重要概念之一,指无人机能够感知任务及其环境,并根据任务需求制定相应的控制策略。
任务感知主要包括感知任务的类型、工作环境、工作范围,以及根据任务需求进行信息处理和分析等。
任务感知能够帮助无人机实现智能化控制和灵活的任务执行。
2.2 预测控制预测控制是自动控制理论中的一种重要方法,用于实现对未来控制性能的预测和优化。
预测控制的主要思想是根据模型预测未来系统评价指标的变化趋势,并通过控制器对当前的控制变量进行调整,以实现对未来控制性能的优化。
预测控制在无人机控制中得到了广泛应用,可以提高无人机的飞行稳定性和准确性。
Chapter 3. 面向任务感知的预测控制方法3.1 数据驱动预测控制数据驱动预测控制是近年来研究较为热门的一种面向任务感知的预测控制方法。
这种方法主要通过对无人机运动数据的大规模收集和分析,构建数据驱动的模型,并利用该模型对未来的无人机运动进行预测和控制。
数据驱动预测控制的方法简单、易于实现,并且能够提高无人机的飞行性能。
3.2 模型预测控制模型预测控制是一种基于数学模型的预测控制方法。
这种方法主要通过建立无人机动力学模型、飞行环境模型和任务模型,并利用这些模型对未来无人机的行为进行预测和控制。
模型预测控制方法具有理论基础,可靠性高,但需要精确建立模型和标定参数。
现代控制理论ModernControlTheory

– Modeling a complex control system by structure diagram or signal-flow graph
4
The Principle of Automatic Control 2008
Chap 3 Time-domain analysis of control systems
• Formula • Properties • How to use laplace transform to solve differential model
– Transfer function
3
The Principle of Automatic Control 2008
Review of Chap2
The Principle of Automatic Control 2008
Time-domain criteria
• 稳定性 (stability) • 动态性能指标(transient performance)
– 响应速度 (speed of response) • Rise time(上升时间),peak time(峰值时间),settling time(调节时间) – 响应形式 (type of response) • Damping (阻尼) ratio, overshoot(超调量),period of oscillation(振荡周期)
5
The Principle of Automatic Control 2008
3-1 Time-domain criteria of control systems
6
The Principle of Automatic Control 2008
现代控制理论最优控制课件

04 离散时间系统的最优控制
CHAPTER
离散时间系统的最优控制问题的描述
定义系统
离散时间系统通常由差分方程描述,包括状 态转移方程和输出方程。
确定初始状态
最优控制问题通常从一个给定的初始状态开 始,我们需要确定这个初始状态。
确定控制输入
在离散时间系统中,控制输入是离散的,我 们需要确定哪些控制输入是可行的。
工业生产领域
02 现代控制理论在工业生产领域中也得到了广泛的应用
,如过程控制、柔性制造等。
社会经济领域
03
现代控制理论在社会经济领域中也得到了广泛的应用
,如金融风险管理、能源调度等。
02 最优控制基本概念
CHAPTER
最优控制问题的描述
确定受控系统的状态和输入,以便在 给定条件下使系统的性能指标达到最 优。
LQR方法
利用LQR(线性二次调节器)设计最优控制 器。
线性二次最优控制的应用实例
经济巡航控制
在航空航天领域,通过线性二次最优控制实现燃料消 耗最小化。
电力系统控制
在电力系统中,利用线性二次最优控制实现稳定运行 和最小化损耗。
机器人控制
在机器人领域,通过线性二次最优控制实现轨迹跟踪 和避障等任务。
03
02
时变控制系统
04
非线性控制系统
如果系统的输出与输入之间存在 非线性关系,那么该系统就被称 为非线性控制系统。
这类系统的特点是系统的参数随 时间而变化。
静态控制系统
这类系统的特点是系统的输出与 输入之间没有时间上的依赖关系 。
发展历程
古典控制理论
这是最优控制理论的初级阶段,其研究的主 要对象是单输入单输出系统,主要方法是频 率分析法和根轨迹法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
4
6
8
10
频频频率频频(频频弧度)
-120 0
2
4
6
8
10
频频率频频(频频弧频 度)
G=tf(10*[1,1],[1,4,20]); X=[];Y=[];w=logspace(-1,1,100); [x,y,w]=bode(G); ……
第一节 频率特性
二 由实验方法求频率特性
正弦信号 发生器
实验装置 (系统或元件)
第五章 频率响应法
第五章 频率响应法
频率响应法是以传递函数为基础的一种控制系统分析方法,与上 一章介绍的根轨迹法一样,它也是一种工程方法。
能根据系统的开环频率特性图形直观地分析系统的闭环响应;还 能判别某些环节或参数对系统性能的影响。
可以对基于机理模型的系统性能进行分析;还可以对来自于实验 数据的系统进行有效分析。
10 563.4
4071.6 8 45
1.2536.8
-1+j0 0
-2-j4
图5-1 零、极点分布
代入不同的频率值,重复上述的计算, 就可求得对应的一组|G(j)|和(j)值。
第一节 频率特性
频频 频频
3
2.5
2
幅 1.5 度
1
0.5
0 0
40
20
0
-20
相 -40 角
-60
-80
-100
也随之作相应的变化,其端点在复平面上移动而形成的轨迹,称为
极坐标图,又称为G(jω)的幅相特性或奈奎斯特(Nyquist)曲线,简
称奈氏图。
第二节 极坐标图
一 典型环节的奈奎斯特曲线 1.比例环节
Im
G( j) K j0 Ke j0
2.积分和微分环节
Im
G( j)
1
1
j
e2
j
ω ω=0
10
30
频频(A) 频频
8
6
幅 度4
2
0
相 -30 角
-60
0
0
2
4
6
8
10
频频频频率频(频频弧度)
-90
0
2
4
6
8
10
频频频率频(频频弧频 度)
图5-4 R-C电路的幅相特性曲线(令A=10,T=1)
第一节 频率特性
对于一般的线性定常系统,设输入为一频率为ω的正弦信号,在 稳态时,系统的输出具有和输入同频率的正弦函数,但其幅值和相 位一般均不同于输入量,且随着输入信号频率的变化而变化。
极坐标图示法是频率特性法分析中常采用的一种图解法。
G( j ) X 2 ( ) Y 2 ( )e j ( )
G( j) X () jY ()
( ) tan1 Y ( ) X ()
| G( j) | X 2 () Y 2 ()
实频特性 虚频特性 相频特性 幅频特性
当输入信号的频率ω由0->变化时,向量G(jω)的幅值和相位
G( j) G(s) s j
G( j ) K ( j z1 )( j z2 ) ( j zm ) , n m ( j p1 )( j p2 ) ( j pn )
m
K
m
n
A i j( i l )
G( j1)
i 1 n
e i1
l 1
Bk
k 1
j1 zi Aie ji ,i 1,2, , m j1 pi Bie ji ,i 1,2, , m
简 z2 ) (s zm )
U
(s p1 )(s p2 ) (s pn ) (s j )(s j )
系统的输出 系统的传函
系统的输入
C(s)
A
A
n
Bi
s j s j i1 s pi
n
c(t) Ae jt Ae jt Bi e pit i 1
不仅适用于线性定常系统,而且还适用于传递函数不是有理数的 纯滞后系统和部分非线性系统的分析。
研究的主要手段有极坐标图(Nyquist图)和伯德图(Bode图)法。
第一节 频率特性
频率特性也称频率响应,它是指系统或部件对不同频率的正弦输 入信号的稳态响应特性。
一 由传递函数求系统的频率响应
G(s) C(s) K (s z1 )(s z2 ) (s zm ) , n m U (s) (s p1 )(s p2 ) (s pn )
第一节 频率特性
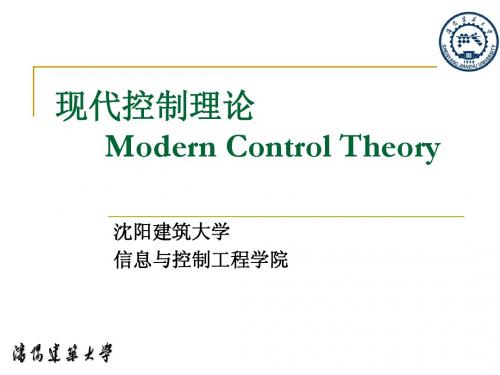
例5-1 设一线性系统的传递函数为
G(s)
10(s 1) s 2 4s 20
(s
10(s 1) 2 j4)(s 2
j4)
试绘制该系统的幅频和相频特性曲线。 解:传递函数零、极点的分布如图所示。
j
-2+j4
令s=j2
G( j2)
10( j2 1)
( j2 2 j4)( j2 2 j4)
设输入电压为正弦信号: ui (t) Asin t
在稳态时,由复数阻抗的概念求得:G
(
j
)
Uo Ui
1
1
jRC
1
1 jT
写成极坐标形式:G( j) G( j) e j()
1 1 T 2 2
tan1 T
第一节 频率特性
频率特性的物理意义是:当一频率为ω的正弦信号加到电路的输
入端后,在稳态时,电路的输出与输入之比;或者说,电路的输出 与输入的幅值之比和相位之差。
A G(s)
U s2 2
(s
j )
s j
G( j)
U 2j
A G(s)
U s2 2
(s
j )
s j
G(
j) U 2j
G( j) G( j) e j() G( j) G( j) e j()
lim c(t) Ae jt Ae jt
t
c(t) U G( j) sin(t )
第二节 极坐标图
第一节 频率特性
对应的幅值和相角:
m
K Ai
G( j1)
i 1 n
Bk
k 1
m
n
(1 ) i k
i 1
k 1
同理,可求得对应于2的|G(j2)|和(j2) 。
若对取所有可能的值,则可得到一系列相应的幅值和相位。 • 其中幅值随频率变化而变化的特性称为系统的幅频特性。 • 相角随频率变化而变化的特性称为系统的相频特性。
0
K
Re
Im
ω
j
G( j) j e 2
ω=0
0
Re
第二节 极坐标图
3.一阶环节
G( j) 1 1 jT
() tan1 T
1
e j ( )
1 T 2 2
G( j ) 1 jT 1 T 2 2 e j () () tan 1 T
双踪 示波器
图5-3 求频率特性的实验方法
系统的幅频特性: | G( j) | Y
X
系统的相频特性: G( j) ()
第一节 频率特性
三 频率特性的基本概念
频率特性
时域响应
c(t) 1 C( j)e jt d
2
时域响应
频率特性
R-C电路的传递函数:
G(s) Uo (s) 1 U i (s) 1 RCs