(完整版)基于PLC的物流堆垛机控制系统设计毕业论文
基于PLC控制的货物运输系统毕业设计(论文)

基于PLC控制的货物运输系统毕业设计(论文)介绍本文档提供了基于PLC(可编程逻辑控制器)控制的货物运输系统的毕业设计论文。
该设计旨在通过PLC技术实现高效、可靠的货物运输和控制。
设计目标设计目标是开发一种能够自动化管理货物运输的系统。
通过PLC控制,系统将能够监测货物的位置、执行货物的运输,并在需要时进行紧急停止。
设计方案本设计采用以下关键组件和技术:- 可编程逻辑控制器(PLC):用于接收输入信号、执行逻辑控制并控制运动设备。
- 传感器:用于监测货物的位置、检测运输过程中的异常情况。
- 执行器:用于控制货物的运输和停止。
系统的工作流程如下:1. PLC接收传感器信号,确定货物的位置。
2. 根据货物位置的信息,PLC执行逻辑控制,调整运输设备的状态。
3. PLC控制执行器,实现货物的运输或停止。
4. 系统持续监测传感器信号,以确保货物的运输过程中无异常情况。
设计实施在实施这一设计时,需要进行以下步骤:1. 确定货物运输系统的需求和规格。
2. 选择适当的PLC和传感器。
3. 根据系统要求编写PLC的逻辑控制程序。
4. 连接PLC和传感器、执行器。
5. 进行测试和调试,确保系统能够按照设计要求正常工作。
结论通过基于PLC控制的货物运输系统的设计,我们能够实现高效、可靠的货物运输和控制。
该系统能够自动化管理货物运输过程,并通过监测传感器信号实时调整运输设备的状态。
希望本设计能对相关领域的研究和应用提供有价值的参考。
请注意:以上内容未引用无法确认的内容,并遵循简单、无法律复杂性的策略。
基于PLC的立体仓库堆垛机监控系统设计论文

基于PLC的立体仓库堆垛机监控系统设计论文摘要:立体仓库堆垛机是一种高效的货物存储和搬运设备,广泛应用于物流行业。
为了实现对立体仓库堆垛机的监控和控制,本论文基于PLC技术设计了一个立体仓库堆垛机监控系统。
该系统采用了PLC作为主控制器,通过传感器实时监测货物的位置和状态,并通过人机界面呈现给操作员,实现对立体仓库堆垛机的远程监控和控制。
经过实际应用验证,该系统具有高效、稳定和可靠的特点,可以实现对立体仓库堆垛机的自动化管理。
1. 引言立体仓库堆垛机是一种现代化的货物存储和搬运设备,具有高效、快捷和节省空间的特点,被广泛应用于物流行业。
传统的立体仓库堆垛机需要操作员进行人工控制和监控,效率低下且易出错。
为了提升立体仓库堆垛机的工作效率和安全性,本论文设计了一个基于PLC的立体仓库堆垛机监控系统。
2. 系统设计2.1 硬件设计本系统的硬件设计主要包括PLC、传感器和人机界面。
PLC作为主控制器,接收传感器信号并控制输出信号,完成对立体仓库堆垛机的监控和控制任务。
传感器主要用于监测货物的位置和状态,包括货物的高度、重量和是否有货物堵塞等。
人机界面通过显示屏实时显示货物的位置和状态,并提供操作界面给操作员。
2.2 软件设计本系统的软件设计主要包括PLC程序、数据库和人机界面程序。
PLC程序通过读取传感器信号和数据库的数据来实现对立体仓库堆垛机的监控和控制。
数据库存储着货物的位置和状态信息,实时更新并提供给人机界面显示。
人机界面程序通过与PLC进行通信,实现对立体仓库堆垛机的远程监控和控制。
3. 系统实现系统实现过程中,首先进行了硬件的搭建和连接,确保PLC、传感器和人机界面正常工作。
然后编写了PLC程序,对传感器信号进行处理,并根据货物位置和状态控制输出信号。
同时,设计了数据库结构,建立了与PLC程序的数据通信。
最后,开发了人机界面程序,实现了对货物位置和状态的实时监控和控制。
4. 系统评估经过实际应用验证,本系统具有高效、稳定和可靠的特点。
基于PLC的堆垛机控制系统设计
基于PLC的堆垛机控制系统设计基于PLC的堆垛机控制系统设计摘要:堆垛机是一种广泛应用于各个领域的自动化物流设备。
在堆垛机运行过程中,控制系统起着至关重要的作用。
本文基于PLC(可编程逻辑控制器)为堆垛机设计了一套控制系统,以提高堆垛机的自动化程度、工作效率和安全性。
关键词:PLC;堆垛机;控制系统;自动化;效率;安全性。
1. 引言堆垛机是一种高效、安全且环保的物流设备,被广泛应用于各个领域。
它可以自动执行货物的存储、取出和转运等操作,大大提升了生产效率和货物管理的精度。
堆垛机的控制系统是保证其正常运行和工作效率的关键因素之一。
在过去的几年中,人们已经在控制系统中应用了多种技术,其中最常见的是PLC技术。
基于PLC的堆垛机控制系统可以实现对堆垛机多种功能的控制和管理。
2. 堆垛机的工作原理堆垛机主要由机架、叉车、货叉和控制系统组成。
在工作过程中,堆垛机首先通过轨道移动到货架前面,然后将叉车铰链装配到货叉上。
加仑之后,货架被移动到指定的位置,叉车将货物从中取出或存放物品。
之后,堆垛机再将货架返回到指定位置,并完成一次工作流程。
3. PLC在堆垛机控制系统中的应用PLC是一种可编程逻辑控制器,被广泛应用于自动化控制领域。
它是一种计算机硬件,可以通过特殊的编程语言(如ladder diagram)实现对工业自动化系统的控制和管理。
在堆垛机控制系统中,PLC可以实现对以下几个方面的控制和管理:位置检测、堆垛高度的控制、货物的存储和取出、货架的旋转等。
4. 堆垛机控制系统的设计4.1系统硬件设计本文所设计的堆垛机控制系统由PLC、人机界面、伺服控制器、以及传感器等部分组成。
PLC通过人机界面与用户进行通信,同时获取传感器检测到的信号和工况数据,并将其转化为控制信号。
伺服控制器用来控制堆垛机电机的转速和扭矩。
最后,传感器是通过获取物体位置和变化等信息,向PLC发送控制信号。
4.2系统软件设计本文所设计的堆垛机控制系统使用了三层架构模式。
基于plc运输及控制系统的设计论文_本科论文

【摘要】 (2)【前言】 (3)【三菱可编程控制器介绍】 (5)1.1FX2N系列PLC的结构特点 (6)1.2FX2N系列PLC的基本组成 (7)【FX2N系列可编程控制器内部元件及功能】 (8)1.21输入继电器(X0) (8)1.22输出继电器(Y) (8)1.23辅助继电器(M) (8)1.24状态器(S) (9)1.25定时器(T) (9)1.26计数器(C) (10)1.27数据寄存器(D) (11)1设计目的 (13)2设计思路 (13)3设计过程 (13)3.1PLC输入/输出端子接线图 (13)3.2程序设计 (14)3.3皮带传输机控制原理 (17)4系统调试与结果…………………………………………………………………………..18/4.1系统调试 (18)4.2调试结果 (18)5主要元器件与设备 (19)6课程设计体会与建议 (20)7参考文献 (21)8附录 (22)8.1指令语句表 (22)8.2梯形图 (24)皮带运输机是当代最为得力的输送设备之一,在整个输送机范畴中,它是应用最为广泛的一种设备,它的产生已有上百年的历史了,现以成为冶金、矿山、水泥、码头、化工、粮食等行业最主要的运输工具。
早期皮带运输机由于其功率小、运距短、速度低,应用受到一定限制。
现针对皮带运输机控制系统中存在的问题,把可编程序控制器和变频器应用于皮带运输机控制系统上,利用可编程控制器取代继电器进行控制皮带运输机的起动和停止。
提高了系统的可靠性,系统的调速控制采用变频器进行变频调速,使调速性能更加稳定,保证了可靠。
输送机是在一定的线路上连续输送物料的物料搬运机械,又称连续输送机。
输送机可进行水平、倾斜和垂直输送,也可组成空间输送线路,输送线路一般是固定的。
输送机输送能力大,运距长,还可在输送过程中同时完成若干工艺操作,所以应用十分广泛。
可以单台输送,也可多台组成或与其他输送设备组成水平或倾斜的输送系统,以满足不同布置形式的作业线带式输送机是输送能力最大的连续输送机械之一。
34基于PLC的堆垛机控制系统设计

收稿日期:2004-06-07;修回日期:2004-07-10作者简介:徐菱(1965-),女,四川成都人,西南交通大学机械学院副教授,在读博士研究生,研究领域为物流装备设计及设备监控、物流信息系统,(E -mail )xl.xnjd @ 。
文章编号:1001-2265(2005)01-0072-02基于P LC 的堆垛机控制系统设计徐菱,劳扬健,王金诺(西南交通大学机械工程学院,成都 610031)摘要:面向现代物流技术的应用和发展要求,结合机电一体化技术,完成自动化立体仓库巷道堆垛机行走机构、升降机构、伸缩叉机构P LC 控制系统设计。
在研究全闭环控制方案的基础上,提出堆垛机运行半闭环控制方案,并给出堆垛机自动认址和调速控制方案及相应的梯形图。
实时性好,停准精度高,可用于高速自动化立体仓库中。
关键词:物流;自动化立体仓库(AS/RS );堆垛机;控制中图分类号:TH246 文献标识码:ADesign of Control System of Stacker Crane B ased on P LCX U Ling , LAO Y ang 2jian ,W ANGJing 2nuo(School of Mechanical Engineering ,School of S outhwest Jiaotong University Chuan chengdu 610031,China )Abstract :Oriented to application and development requirement of m odern logistics techniques ,a P LC control system for automated highrise warehouse is developed using the technology of mechatronics engineering.The system is used to control the stacker walking mechanism ,the elevator mechanism and the extensive mechanism of narrow 2aisle stacker crane.On the basis of research for closed loop system ,A kind of stacker control system that stacker con firms its S ite and adjustment velocity automatically was proposed and the ladder shaped graph are sub 2mitted.I t can be used for automated highrise warehouse with high velocity.K ey w ords :logistics ;automated highrise warehouse ;narrow 2aisle stacker crane ;control0 前言自动化立体仓库是自动化生产的重要组成部分,用于存储配件、半成品、产品、工具、夹具和模具等。
【毕业设计】基于PLC的立体仓库堆垛机控制系统设计
自动化专业毕业设计任务书一一一一、、、、设计题目设计题目设计题目设计题目::::基于基于基于基于PLC的立体仓库堆垛机控制系统设计的立体仓库堆垛机控制系统设计的立体仓库堆垛机控制系统设计的立体仓库堆垛机控制系统设计二、毕业设计的目的毕业设计的目的毕业设计的目的毕业设计的目的 1.设计一个立体仓库堆垛机控制系统; 2.水平移动、垂直移动及伸叉机机构分别由220W 的三相交流异步电动机、200W 的单相交流异步电动机和二相混合式步进电机驱动;3.上述电机由西门子S7-226型PLC控制,其中水平移动、垂直移动由PLC通过变频器控制,步进电机由步进驱动模块进行自动控制。
三、主要设计内容主要设计内容主要设计内容主要设计内容 1.变频调速系统设计;2.货叉伸缩控制;3.PLC控制程序编写与调试;四、重点研究问题重点研究问题重点研究问题重点研究问题 PLC控制,确定设计方案,完成各功能单元的结构设计,参数计算和元件选择。
五、主要技术指标或主要设计参数主要技术指标或主要设计参数主要技术指标或主要设计参数主要技术指标或主要设计参数堆垛机运行的速度范围:水平方向:2m/min-360m/min;垂直方向:2m/min-80m/min;货叉: 2m/min-60m/min 六、设计成果要求设计成果要求设计成果要求设计成果要求 1.毕业设计论文要求字数为10000-15000字,论文格式参照华北水利水电学院关于本科毕业设计论文格式要求;2.系统电气原理图,要求用0#图纸(按国标要求绘制);3.各部分环节的工作原理及调试故障分析及排除方法;4.毕业设计论文内插图必须用电脑制作;I华北水利水电学院毕业设计说明书I 基于基于基于基于PLC的立体仓库堆垛机控制系统设计的立体仓库堆垛机控制系统设计的立体仓库堆垛机控制系统设计的立体仓库堆垛机控制系统设计摘摘摘摘要要要要在现代的物流仓储系统中,自动化立体仓库应用日益广泛。
而堆垛机是立体仓库的关键组成部分,堆垛机性能的优劣对整个立体仓库的运行起到至关重要的作用,所以设计与开发自动化程度较高的堆垛机控制系统成为当前立体仓库的发展趋势,开展与此有关的研究具有重要的理论和应用价值。
毕业设计(论文-基于plc包装码垛生产线控制系统设计
毕业设计 - 基于 PLC 包装码垛生产线控制系统设计1. 引言1.1 研究背景在现代制造业中,包装码垛生产线起着关键的作用。
传统的包装码垛生产线通常由人工操作,存在人工操作不精确、效率低下、易出错等问题。
为了提高生产线的效率和质量,自动化控制系统成为一种必要的解决方案。
PLC(可编程逻辑控制器)作为工业控制系统的核心设备,被广泛应用于自动化生产线的控制系统。
1.2 研究目的本文旨在设计一个基于 PLC 的包装码垛生产线控制系统,通过自动化控制实现对生产线的高效、稳定的控制,提高生产线的生产效率和质量。
2. 研究方法本文采用如下研究方法进行研究:1.调研相关文献,了解包装码垛生产线的现状和发展趋势;2.分析生产线的工作流程和数据流,确定控制系统设计需求;3.设计 PLC 控制系统的硬件架构,选择合适的 PLC 设备;4.设计 PLC 控制系统的软件架构,包括编写逻辑控制程序和人机界面设计;5.实施控制系统的搭建和集成测试;6.对控制系统进行性能测试和稳定性测试;7.撰写毕业设计论文。
3. 研究内容3.1 包装码垛生产线工作流程分析通过调研和实地考察,对包装码垛生产线的工作流程进行详细分析。
包括原料供给、包装、码垛、包装检验等环节,找出可以实现自动化控制的关键环节。
3.2 PLC 控制系统硬件设计根据生产线工作流程和需求,设计 PLC 控制系统的硬件架构。
选择合适的 PLC 设备,包括主控模块、输入输出模块、通信模块等。
3.3 PLC 控制系统软件设计设计 PLC 控制系统的软件架构,包括编写逻辑控制程序和人机界面设计。
逻辑控制程序包括生产线的自动化控制逻辑和故障处理逻辑。
人机界面设计包括监控界面和操作界面。
3.4 控制系统搭建和集成测试根据软硬件设计,搭建 PLC 控制系统,进行集成测试。
验证控制系统的功能和性能是否满足设计要求。
3.5 控制系统性能测试和稳定性测试对搭建完成的控制系统进行性能测试和稳定性测试。
机械毕业设计877基于PLC的堆垛机自动控制系统毕业论文

第1章绪论随着科学技术和工业生产的飞速发展。
现代物流技术领域内出现了一种新型仓储方式——自动化立体仓库。
自动化立体仓库系统是一种用立体货架储存物资,由计算机控制管理和自动控制的堆垛机进行存取作业的仓库.它占地面积小、自动化程度高,因此被广泛运用在机场码头、造纸、食品服装,化工制药、啤酒厂和其他行业的物流系统中。
自动立体仓库作为物资存储和物流调节的重要手段及现代物流系统的重要组成部分,不但在现代经济中起着非常重要的作用,而且在一定程度上体现着一个国家的经济发展水平。
1.1 自动化立体仓库简介1.1.1 国外发展状况立体仓库是存储的机电一体化高科技集成系统,它集机械、电子计算机、通信、网络、传感器和自动控制等多种技术于一体,以搬运机械化、控制自动化、管理微机化、信息网络化为特征,成为现代化物流设计中产品生产与存储的枢纽。
自动化立体仓库系统主要由货物储存系统、货物存取系统、运输系统、控制和管理等系统所构成,它采用PLC控制、变频器调速、光电检测定位、步进驱动控制及计算机管理等一系列自动控制技术。
它已经在世界范围内的仓储领域得到广泛应用。
据不完全统计,美国拥有各种类型的自动化立体仓库2000多座,日本拥有38000多座,德国拥有1000多座,英国有400多座,前苏联有1500多座。
90年代后,堆垛机在使用范围和性能上有了很大的发展。
1.1.2 国内研究动态及发展水平我国自动化立体仓库的设施一向比较落后,上世纪60年代才出现机械化物料搬运,从70年代才开始自行设计仓库中的各种设备,80年代初引进国外先进技术设计生产,到90年代我国才进入自动化立体仓库的发展时期,设备的生产和使用才有了较大的发展,开始使用电子计算机管理,仓库实现了半自动化和自动化。
目前,我国已建成并投入使用的自动化立体仓库已有数百座,在堆垛机、输送机、分配机的设计制造及控制方面积累了丰富的经验,取得不少的进步;但与国外厂商相比,在自动化程度、信息处理,可靠性方面还存在很大的差距。
基于西门子PLC的自动化立体仓库堆垛机控制系统设计
设计应用》》基于西门子PLC的自动化立体仓库堆垛机控制系统设计宁夏职业技术学院 哈贵庭【摘要】自动化立体仓库是建立在计算机管理技术、自动化控制技术和机械制造设计技术三者的基础上,它具有独立完成仓库物流作业的能力,准确的将货物运送至存取地点,并科学管理仓储信息,因而它是促进现代物流进程的关键。
自动化立体仓库堆垛机控制系统主要由计算机管理系统、高层货架和堆垛机三部分组成,本文针对其结构和工作流程进行了简单的介绍,并着重讲述了各子系统的硬件、软件设计,以促进自动化立体仓库堆垛机控制系统在现代物流仓管中的运用。
【关键词】自动化立体仓库系统;西门子;PLC1.前言现代物流技术和自动化技术的不断发展衍生了各种物流产品,立体仓库就是针对物流仓储常用的一种,立体仓库作为自动化技术的产品,它综合了自动控制技术与计算机管理技术,借助堆垛机对货物实现存取操作,自动化立体仓库堆垛机不仅具有存取货物的功能,它还能对货物进行分类、分拣、计数和配送等操作。
自动化立体仓库主要由计算机控制系统、自动化堆垛机和高层货架三部分组成,多个功能子系统共同构成了物流仓储的信息系统。
随着客户对物流信息化要求增高,切实掌握仓储情况及时更新仓储信息成了现代物流信息化的重要因素,为了提高物流信息的可靠性和实时性,我们必须保证立体仓库系统具有正常作业和信息统计功能。
除此之外还需提高立体仓库系统的柔性化,在系统中融入条形码扫描技术和射频计数等采集货物信息的技术,以满足现代物流自动化需求。
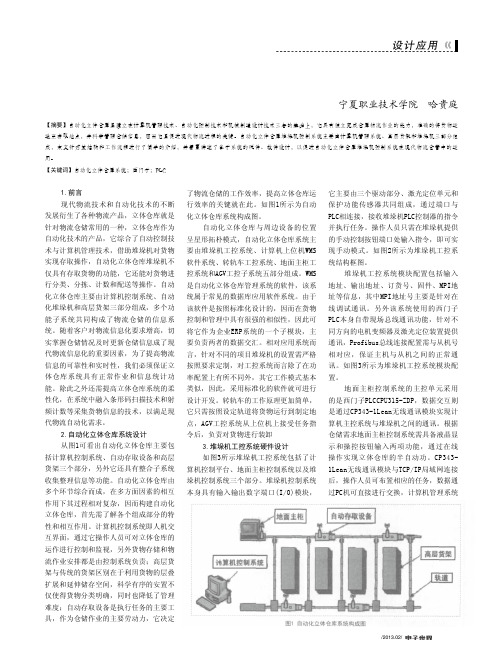
2.自动化立体仓库系统设计从图1可看出自动化立体仓库主要包括计算机控制系统、自动存取设备和高层货架三个部分,另外它还具有整合子系统收集整理信息等功能。
自动化立体仓库由多个环节综合而成,在多方面因素的相互作用下其过程相对复杂,因而构建自动化立体仓库,首先需了解各个组成部分的特性和相互作用。
计算机控制系统即人机交互界面,通过它操作人员可对立体仓库的运作进行控制和监视,另外货物存储和物流作业安排都是由控制系统负责;高层货架与传统的货架区别在于利用货物的层叠扩展和延伸储存空间,科学有序的安置不仅使得货物分类明确,同时也降低了管理难度;自动存取设备是执行任务的主要工具,作为仓储作业的主要劳动力,它决定了物流仓储的工作效率,提高立体仓库运行效率的关键就在此。
基于PLC的堆垛机控制系统设计

基于PLC的堆垛机控制系统设计摘要:随着时代的发展和科学技术的融合,物流技术日渐呈现出现代化发展趋势。
伴随物流现代化技术的应用和发展,做好仓库的立体化构建,并实现机电一体化的融合,才能够满足当前现代化物流的需要。
基于PLC控制系统所构建的堆垛机,则能够实现行走机构、伸缩叉机构、升降机构等多功能需要,并实现其精度的提升,在现代化仓库建设中发挥重要作用。
关键词:PLC控制系统;堆垛机控制系统;系统设计前言:现代化物流的建立离不开立体仓库的建设,立体仓库的建设和应用能够节省大面积土地的使用,并对空间予以高效利用,结合计算机技术控制,能够实现便捷、快速货物的存取。
堆垛机作为仓库建设的重要组成部分,更加需要高度重视和对待,结合PLC技术进行堆垛机控制系统的设计,则可以让其更具自动化,让其立体化仓库运行过程中发挥核心作用。
一、堆垛机系统组成及功能分析堆垛机一般由升降机构、运行机构、货叉、伸缩机构、机架以及电气部分等组成。
立体化仓库之中所运用的堆垛机,要求能够接受上位机指令,并作出适当判断,通过指令分析所要运行的方向,判断入库还是出库,判断依托于手动操作还是自动操作。
堆垛机还需要结合自身所在位置,以及指令完成需要进行比较判断,进而作出正确的运行。
一般来说,堆垛机有水平行走、垂直运行、货叉伸缩等三种基本操作。
融合PLC技术则可以让堆垛机完成以上功能,并进行精准运行。
二、堆垛机运行原理堆垛机所选用的运行方案为半闭环控制方案,结合实践需要来进行控制运行。
其运行原理主要通过主控机的指令发出,发送到变频器之后再将指令发送到电机,电机所发出的指令进入到运行机构,则实现堆垛机运行。
其中质量到电机之后一部分指令也进入传感器,传感器可以对速度进行反馈,进而调整堆垛机的运行速度。
堆垛机具有曲线式存储变频器,这样可以让堆垛机通过比较的方式来进行起止距离的分析,继而选择最佳路线。
在此原理支撑下结合PLC对堆垛机进行控制系统设计则能够达到更好的应用效能。
基于PLC的立体仓库堆垛机控制系统设计毕业论文
基于PLC的立体仓库堆垛机控制系统设计毕业论文目录1 绪论 (2)1.1 自动化立体仓库的概述 (2)1.2 堆垛机概述 (2)1.3 本设计主要研究容 (3)1.4 堆垛机技术的研究现状 (4)2 系统总体设计 (4)2.1 控制技术要求和系统总体设计 (4)2.2 位置定位 (5)2.3 堆垛机的控制方式 (7)3 硬件设计 (7)3.1 硬件设计控制原理分析 (7)3.2 硬件设计PLC选型及其资源配置 (8)3.3 元器件的选型 (9)4软件设计 (19)4.1控制系统PLC程序流程 (19)4.2 PLC的I/O资源配置 (20)4.3控制系统软件设计及其程序说明 (21)5 系统调试 (26)5.1 硬件部分的调试 (26)5.2 软件部分的调试 (26)6总结 (27)参考文献 (28)附录 (29)致谢 (33)1 绪论1.1 自动化立体仓库的概述在现代物流系统中,自动化立体仓库是一个重要的组成部分,它是一种新型的仓储技术。
自动化立体仓库又称为自动存储/检索系统(Automated Storage &Retrieval System,AS/RS)。
它是物料搬运和仓储科学中的一门综合科学技术工程。
它以高层货架为主要标志,配以成套的先进搬运设备,以先进的计算机控制技术为主要手段,由此组成高频率、大容量的科学存储,以适应现代化生产、物资交流和仓储的需求。
1.2 堆垛机概述堆垛机是自动化立体仓库系统的重要组成部分,它是整个系统的执行部件,存货时将货物从出入货台准确的存放到货位里,取货时将货物从货位中取回到出入货台。
无论何种类型的堆垛机,一般都由水平行走机构、起升机构、载货台及货叉机构、机架和电气设备等基本部分组成。
它是在所谓高层、高速、高密度储藏的概念下的产物。
尽管各厂家各有独创,结构形式有些差异,但可以说小异,所有的堆垛机都不外乎由机架、载货台、伸缩货叉、轨道和控制系统等部分组成。
毕业设计论文--基于PLC的全自动包装码垛生产线控制系统设计

毕业设计论文--基于PLC的全自动包装码垛生产线控制系统设计。
摘要传统设备产为电气压动设备随着工业断发设备己动操为自动设备发为电的综编 PLC 是以微处为,综计术动术术发来工业动装经过30年的发编为工业动领要、应装跃居工业产自动可编数计辅设计的首位。
其应广为个国工业进动标论从编 PLC 基础个系统规设计PLC控制系统软开发,给详细设计该统包装码动产线统统编 PLC 为基础进动包装码产线要应粮食医药业中块状胶粮食动包装对包装过称装边号打检测、转编组码盘和盘的输业实现动PLC为基础动包装码产线统简单维护、适应性强动节约产PLC;控制系统包装码动产线AbstractThe traditional mechanical device and the product, many are by the machinery primarily, is electrical, the hydraulic pressure or the pneumatic control mechanical device. Along with the industry level's unceasing development, mechanical device oneself changes the automatic control gradually by the manual operation, the equipment itself also develops into the integration of machinery complex compound. Programmable controller PLC is take the microprocessor as a core, the comprehensive computer technology, the automated technology and the communication develop one new industry automatic control device. After more than 30 years development, at present, the programmable controller has become in the industrial automation domain to be most important, to apply most control devices, oneself leaps to the industrial production automation four big props programmable controller, numerically-controlled machine tool, robot, computer-aided design and manufacture the first place. Its application's depth and the breadth have become weigh a national industry to be advanced and automaticity height symbol.This thesis consists of four chapters, from the programmable logic controller PLC based planning and design of the entire system, and PLC control system hardware, software development, give full and detailed design ideas. The core of the system is Palletizing automatic production line control system, the control system is mainly based on programmablelogic controller PLC as the basis for integrated control.Automatic Palletizing production line is mainly used in chemical, food, food and pharmaceutical industries in the flour, grain, bulk materials such as plastics, fertilizers, synthetic rubber, food, etc. of the automatic packaging, ie packaging process weight for bags, bagging, folding, envelope, plastic bags down, batch printing, testing, transfer grouping, stacking, pallets, and stack operations such as disk full automated transmission. With PLC based fully automatic palletizing packaging production line, control system is simple, easy maintenance, strong adaptability, high automation, saving manpower, can greatly increase productivity. Key word:PLC;Control System;Palletizing automatic production line目录第1章绪论 11.1 PLC的产生和发展、优点、应用现状和发展趋势 11.2 包装码垛自动生产线的发展 41.3 课题主要研究内容5第2章包装码垛自动生产线机械系统的工作原理 62.1 概述 62.2 包装码珠自动生产线系统组成 6第3章包装码垛自动生产线PLC控制系统设计103.1 PLC的基本结构103.2 PLC的主要组成部分113.3 PLC的工作原理123.4 PLC控制系统设计 13第4章程序调试364.1 程序输入和编辑364.2 梯形图逻辑测试374.3 监控程序384.4 监控元件394.5 退出PLC仿真运行41结论42参考文献43致谢44第1章绪论可编计术术和继电术础发来编逻辑控Programmable Logic Controller),即PLC,现广泛应工业个领处为用编写不仅进逻辑控,还定时计数术运过数拟输/输来设备产过1.1 PLC的产生和发展、优点、应用现状和发展趋势1.1.1 PLC的产生和发展1968年美国车继电装1969年,美国数字设备编PDP-14,在美国车产在线试应电气这编称Programmable认PLC。
基于PLC的立体仓库堆垛机监控系统设计_毕业设计

安徽工业大学毕业设计(论文)说明书┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊基于PLC的立体仓库堆垛机监控系统设计摘要在现代的物流仓储系统中,自动化立体仓库应用日益广泛。
而堆垛机性能的优劣,对整个立体库的正常运行起着重要的作用。
在自动化立体仓库中设计出造价低廉、工作可靠的堆垛机替代原有仓库的控制和管理,能更加适应某些中小企业要求投资少见效快的目标。
本论文就实现这一目标的堆垛机控制系统进行了设计。
本文详细阐述了本控制系统的设计思想,以及整个系统的硬件实现和软件设计。
本文所述系统采用先进的PLC控制器控制,变频器驱动的闭环交流伺服系统。
采用光电传感器检测堆垛机位置,分析了堆垛机的工作过程,并研究了堆垛机运动制、认址检测方式,实现了堆垛机的定位方案。
采用S7-200 PLC对堆垛机系统进行控制,并给出关键部分的程序。
为了监控和管理立体仓库的运行状态,利用组态王软件对立体仓库的运行情况设计了一个实时监控系统。
该系统能对现场数据进行采集处理,管理人员只要通过运行监控系统就可以实时监控立体仓库的工作状态,保证了正常运作,对出现的问题作出及时的判断和处理。
关键字:自动化立体仓库;堆垛机;PLC ;组态安徽工业大学毕业设计(论文)说明书┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊AbstractIn modem logistics warehousing systems,automated storage is increasingly widespread.Performance of the stacker plays an important role.New stacker which is low cost and reliable replace the original control and management of the automated storage.The new stacker can be better adapted to the requirements of low investment and some small or medium-sized quick goals.This paper elaborated on the design of the system of control,as well as the implementation of the system,s hardware and the design of the software.In this paper it is used that the modem closed-loop AC servo-system controlled by PLC and transducer.Light-electricity sensors are used to measure displacement of the hay stacker.They are analyzed,which include work process,the way of recognizing the site and the running control in the hay stacker system.the S7-200 PLC is used to the micro-controller in the automated storage,and gives a key part of the program. In order to monitor and manage the operation of tridimensional warehouse status,with the input of configuration software for the operation of tridimensional warehouse has a real.time monitoring system.The system is capable of on-site data collection and processing,the operator could launch the monitoring system to get areal-time updates of the working status of the warehouse,to ensure a safe operation and immediate error shooting and correction treatment.Key Words:the automation stereoscopic warehouse; stacker; PLC; King view安徽工业大学毕业设计(论文)说明书┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录摘要 (I)第1章绪论 (1)1.1 研究背景 (1)1.2 国内外研究现状和发展趋势 (2)1.2.1 自动化立体仓库的发展 (2)1.2.2 堆垛机的发展 (2)1.3 课题研究的意义 (3)1.4 研究的主要内容 (3)第2章自动化立体仓库总体方案 (4)2.1 立体仓库的概况 (4)2.1.1 电控系统设计依据 (6)2.1.2 立体仓库的电控系统结构图 (7)2.2 系统结构形式的选择 (8)2.2.1 PLC的选择 (8)2.2.2 S7-200系列PLC概述 (9)2.2.3 CPU型号选择 (9)2.2.4 PLC模块选型 (11)2.2.5 通信方案的确立 (12)2.3 堆垛机的位置控制 (13)2.3.1 定位控制 (14)2.3.2 认址检测方式 (14)2.3.3 认址方式确认 (15)2.3.4 堆垛机速度曲线分析 (17)2.3.5 安全传感器的选用 (17)2.3.6 安全保护 (19)2.4 堆垛机闭环控制系统 (19)2.5 堆垛机变频调速系统 (20)2.5.1 变频器的概述 (20)2.5.2 变频调速技术的优点 (21)2.5.3 变频器的基本结构 (21)2.6 元器件的选型 (23)2.7 本章小结 (24)第3章仓库控制系统的软件设计 (25)3.1 可编程控制器PLC (25)3.1.1 PLC的定义 (25)3.1.2 PLC的发展 (25)3.1.3 PLC的编程语言 (26)3.2 PLC控制系统总体设计 (26)3.3 PLC 输入输出点分配 (26)3.4 堆垛机控制程序设计 (27)3.4.1 堆垛机运行控制 (29)3.4 本章小结 (38)第4章立体仓库组态监控系统设计 (39)4.1 组态王软件的设概述 (39)4.1.1 组态和组态软件 (39)4.1.2 组态王6.53软件 (39)安徽工业大学毕业设计(论文)说明书┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊4.1.3 组态王的主要功能与实现 (40)4.2 组态监控系统的设计 (40)4.2.1 定义设备 (41)4.2.2 建立工程 (41)4.2.3 画面设计 (43)4.2.4 构建数据库变量 (46)4.2.5 建立动画连接 (47)4.3 监控系统的完善 (49)4.4 本章小结 (49)结论 (51)致谢 (52)主要参考文献 (53)第1章绪论1.1 研究背景随着经济和现代科技的不断发展,物流已由最初概念的形成,发展和不断完善;在全球迅速成长为具有无限潜力和发展的新型服务行业。
基于PLC的物流堆垛机控制系统设计毕业论文
毕业论文基于PLC的物流堆垛机控制系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于PLC的自动化立体仓库控制系统设计..

前言随着企业的持续稳定发展,经济全球化步伐也迅速加快,我国的工业也出现了翻天覆地的变化,一方面高科技的加工工艺越来越得到推广,加工效率也得到了大大的提高。
与此同时原有的物流和仓储系统已不能满足新形势的要求,建立一个集物流、信息流和资金流于一身的自动化物流管理中心,从而降低企业综合物流成本,提高企业综合效益便成为目前亟待解决的问题。
自动化立体仓库是指在不直接进行人工处理的情况下, 自动地完成物品仓储和取出的系统,它以高层立体货架为主体, 以成套搬运设备为基础, 是集自动控制技术、通信技术、机电技术于一体的高效率、大容量存储机构。
PLC 作为一种工业控制计算机, 具有模块化结构、配置灵活、高速的处理速度、精确的数据处理能力、多种控制功能、网络技术和优越的性价比等性能, 是目前广泛应用的控制装置之一。
自动化立体仓库的出现, 实现了仓库功能从单纯保管型向综合流通型的转变,而且自动化立体仓库是现代物流与仓储系统的重要组成部分,具有货物存取效率高和自动化程度高、很强的入出库能力等优点。
而PLC功能强大,可靠性高,抗干扰能力强,维修方便,易于实现机电一体化。
完全满足立体仓库工作环境和控制系统的要求。
但是由于立体仓库前期投入大,需要专业人才从事维护,维持费用高,只有资本雄厚的企业才会重视立体仓库,成本成为立体仓库发展的限制因素,因此如何降低立体仓库的成本或者设计中小型立体仓库自然成为重中之重更利于推广与普及。
本设计就是针对那些中小型企业而设计的采用三菱FX1N系列PLC作为核心控制元件的中小型字体仓库,而且结构可以灵活调整,它既可以是单排或者双排货架的自动化立体仓库,也可以是自动化立体车库,可以根据需求调整。
采用专用键盘作为人机接口部件,具有手动和自动操作,可根据用户需求人机之间进行信息交换,作控制步进电机来驱动一个有三自由度的小车在高强度导轨上做三维运动来完成一系列动。
1 绪论1.1 自动化立体仓库的发展情况及发展趋势随着现代工业生产的发展,柔性制造系统(FlexibleManufacturing System)、计算机集成制造系统(Computer Integrated Manufacturing System)和工厂自动化(Factory Automation)对自动化仓库提出更高的要求。
基于plc的运输设计-毕业设计(论文)

哈尔滨华德学院毕业设计(论文)摘要本文介绍了利用可编程控制器PLC对传送带、机械手进行的控制,可以很容易地完成自动和手动切换。
机械手是机械化、自动化生产过程中发展起来的一种新型装置。
因为它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐,在生产过程中,经常要对流水线上的物体进行分拣,本毕业设计机械手传送带控制系统的PLC设计,采用的西门子PLC,对机械手的上下、左右和抓取运动进行控制,用于检测物体是否合格并且进行分类的机械装置。
设计主要是机械手与传送带的原理介绍、软件仿真两部分,以组态软件仿真为核心,采用可编程控制器PLC作为控制器,设计了基于plc的运输设计,上位机采用mcgs昆仑通态软件完成工业控制计算机与PLC之间的数据通讯,并且分为自动和手动,来实现运输的存货和取货。
不仅可以提高产品的质量,而且对于人身安全的保障,提高劳动生产率,节约原材料消耗和降低成本。
与此同时我利用MCGS组态昆仑通态软件对整个系统进行仿真设计监控。
关键词:PLC;机械手;MCGS组态-I-哈尔滨华德学院毕业设计(论文)AbstractThis paper introduces the use of programmable controller PLC of conveyor belt, manipulator control, can easily complete the automatic and manual switch.Manipulator is developed in the process of mechanization, automation production, a new type of device. Because it can greatly improve the working conditions of workers, accelerate the pace of industrial production mechanization and automation, in the process of production, often want to sorting objects on the assembly line, this graduation design manipulator conveyor design of PLC control system, adopting Siemens PLC, up and down, left and right sides and fetching movement of manipulator control, used to test whether qualified object and classification of machinery. Design is primarily a manipulator with two parts, the principle of conveyor is introduced, the software simulation based on configuration software simulation, using programmable controller PLC as controller, designed the transportation design based on PLC, PC using kunlun pass the MCGS configuration software to complete the data communication between industrial control computer and PLC, and divided into automatic and manual, to achieve the inventory and transportation. Not only can improve the quality of the products, and for the protection of the personal safety, improve labor productivity, save raw materials consumption and reduce costs.At the same time I kunlun state using the MCGS configuration software monitoring the simulation to the whole system design.Keywords:PLC;Mechanical arm; MCGS configuration-II-哈尔滨华德学院毕业设计(论文)目录摘要 (I)Abstract ............................................................. I I 第1章绪论. (1)1.1 课题背景 (1)1.2 研究意义 (1)1.3 本文结构 (1)第2章系统设计 (2)2.1 总体要求 (2)2.2 控制要求 (2)2.3 方案分析与设计 (2)2.4 本章小结 (4)第三章传送带传送系统的设计 (5)3.1 传送带传输系统的设计方案 (5)3.2 接触器的介绍及选用 (6)3.2.1 接触器的介绍及分类 (6)3.2.2 接触器的选用依据 (7)3.3 传送带电动机的介绍及选用 (7)3.3.1 电动机的介绍及分类 (7)3.3.2 电动机的型号及选用依据 (8)3.4 行程开关的介绍及选用 (8)3.4.1 行程开关的介绍及分类 (8)3.4.2 行程开关的选用及型号依据 (9)3.5 光电传感器的介绍及选用 (9)3.5.1 光电传感器的介绍及分类 (9)3.5.2 传感器的选用及型号依据 (10)3.6二维码扫描器的选用 (10)3.7按钮的介绍及选用 (11)3.7.1按钮的介绍及分类 (11)3.7.2按钮的选用以及依据 (11)3.8 本章小结 (11)第四章机械手控制系统的设计 (12)4.1 机械手控制系统的设计方案 (12)4.2 电磁阀的介绍及选用 (13)4.2.1 电磁阀的介绍及分类 (13)4.2.2 电磁阀的选用以及依据 (13)-II-哈尔滨华德学院毕业设计(论文)4.3 限位开关的选用以及依据 (14)4.4 本章小结 (14)第五章PLC程序的设计 (15)5.1 PLC的介绍及选用 (15)5.1.1 PLC的介绍及分类 (15)5.1.2 PLC的特点 (15)5.1.3 PLC结构 (15)5.1.4 PLC性能指标和应用领域 (17)5.1.5 PLC的选用以及依据 (17)5.2 I/O地址分配 (18)5.3 梯形图 (3)5.4本章小结 (20)第六章组态仿真的设计 (21)6.1 组态软件的介绍及选用 (21)6.1.1 组态软件的介绍 (21)6.1.2 组态软件的选用 (21)6.2 MCGS简介 (21)6.3 MCGS组态监控画面 (22)6.3.1 通讯设定: (22)6.3.2画面: (24)6.4 组态语言 (25)6.5 组态调试 (30)6.6 本章小结 (35)结论 (36)致谢 (37)参考文献 (38)附录1 译文 (39)附录2 英文参考资料 (40)-III-哈尔滨华德学院毕业设计(论文)第1章绪论1.1 课题背景由于经济全球化的大潮,世界各国之间贸易频繁,对仓储条件的要求越来越高,传统的仓库运输已不能满足要求,传统仓储运输技术效率低下,空间利用率低,并且需要较多的人员维持仓库的运输,自动化程度很低,同时也存在着安全隐患,所以随着国内经济的飞速发展,已经严重不适应国内各行各业的发展需求,所以市场前景很大。
毕业设计(论文)-基于plc的仓储动态管理控制系统设计[管理资料]
![毕业设计(论文)-基于plc的仓储动态管理控制系统设计[管理资料]](https://img.taocdn.com/s3/m/6d59907271fe910ef02df827.png)
专科毕业设计(论文)设计题目:基于PLC的仓储动态管理控制系统设计系部:电气工程系专业:电气自动化班级:工企091301姓名:学号:093905130114指导教师:职称副教授2012年6月南京摘要现今社会发展十分迅速,在过去,一个工厂的仓库存货的清点、即时添加货物、添加货物数量的多少及货物到时的所卸位置都需要人为管理,这样一个工厂就需要大量的人力。
可是即使使用如此多的人力,也不能很好的完成所需做的任务,因为人总会犯错,在工作过程中难免对数量的计算错误,也难免会对货物停放位置的指挥发生失误。
但是随着社会的进步与发展,也随着PLC的出现与广泛的应用,上面的问题已经有了很好的解决。
对于计数我们可以用PLC来解决,而对于小车运料,传统的运料小车大都是继电器控制,而继电器接线繁多,故障率高的缺点,且维修不易等缺点。
作为目前国内控制市场上的主流控制器,PLC 在市场、技术、行业等方面有重要作用,利用PLC控制代替继电器控制是大势所趋。
本文是通过对工厂仓库所需布料的匹数的控制及使用小车来运料进货这一过程进行PLC设计来使大家对PLC有更深的认识,从而更加贴近于社会的发展,更了解科技的进步。
也是通过过去与今天的对比更加体现社会进步之迅速。
关键词PLC 运料小车设计外围接线图梯形图程序设计AbstractToday's social development is very rapid in the past, a factory warehouse stock inventory, add the goods, immediately add the quantity of goods and cargo to the unloading position need human management, such a plant requires a lot of manpower. But even with so many human, can not be very good to do the task, because to err is human, inevitably the number of calculation errors in the course of their work will inevitably have the command of the cargo parking location mistakes.Along with social progress and development With PLC emergence of a wide range of applications, the above problem has been a very good solution. Count we can use the PLC to solve the car haul haul car are relay control and relay wiring numerous shortcomings of the high failure rate and maintenance is not easy shortcomings. As the mainstream controller in the domestic market, the PLC has an important role in the market, technology, industry, PLC control instead of the relay control is a general trend.This is the number of horses required for factories, warehouses fabric control and use the car to transport materials to purchase this process PLC design to have a better understanding of the PLC, which is closer to the development of society, a better understanding of science and technology progress. Also through the comparison of past and present reflect the more rapid social progress.Keywords PLC operational expected car design the external wiring diagram ladder programming目录1 绪论 (1)2 PLC的概述 (1)3 仓储管理 (1)4 仓储管理控制系统设计 (1) (1) (1) (2) (2) (2) (4) (4) (5) (5)结论 (7)致谢 (7)参考文献 (9)1 绪论传统的社会中,技术的局限性使得工厂在仓库存储方面有着些问题,为了生产的需要,工厂需要在仓库中储存一定的原料,但这原料数量是根据生产的需要来确定的,所以这是固定的,太少不能满足于生产,而太多又浪费。
基于plc控制的面粉码垛机设计大学毕设论文

基于plc控制的⾯粉码垛机设计⼤学毕设论⽂毕业设计说明书设计题⽬: 基于PLC控制的⾯粉码垛机设计学⽣姓名学号专业班级指导教师⽬录摘要 (4)第1章绪论 (5)1.1课题的意义 (5)1.2课题的主要内容 (5)1.3任务分析及其要求: (6)1.4设计进度安排: (6)1.5设计⽅案的确定: (7)1.6本设计主要研究的内容: (9)第2章⾯粉码垛机的总体设计 (11)2.1码垛机器⼈的组成及各部分关系概述: (11)2.2码垛机械⼿的设计分析: (11)第3章码垛机抓取结构的设计分析 (15)3.1末端操作器的设计分析: (15)3.2码垛机⼿腕的设计分析: (15)3.3⼿臂的设计分析: (16)3.4机⾝和机座的设计分析: (18)第4章机械⼿各部件的载荷计算 (19)4.1 设计要求分析: (19)4.2 ⼿指夹紧机构的设计: (19)4.3 ⼿臂伸缩机构载荷的计算: (20)4.4 ⼿臂俯仰机构载荷的计算: (22)4.5 机⾝摆动机构载荷⼒矩的计算: (22)4.6 初选系统⼯作压⼒: (23)第5章机械⼿各部件结构尺⼨计算及校核 (25)5.1 ⼿腕油缸尺⼨的确定: (25)5.2 ⼿臂伸缩机构结构尺⼨的确定: (28)5.3 ⼿臂俯仰机构结构尺⼨的确定: (28)5.4 机⾝摆动机构的确定: (28)5.5 强度校核: (28)5.6 弯曲稳定性校核 (29)第6章液压系统的设计 (31)6.1 制定基本⽅案: (31)6.2 液压元件的选择: (32)第7章控制系统的设计 (38)7.1 控制系统⽅式选择 (38)7.2 PLC概述 (38)7.3 PLC选型及硬件配备 (39)7.4 输⼊输出地址分配 (39)可编程控制器的输⼊、输出接线图如图 (40)7.5电⽓控制系统线路设计 (40)结论 (42)参考⽂献 (43)致谢 (45)摘要随着现代科学技术的发展,机器⼈技术越来越受到⼴泛关注,在⼯业⽣产⽇益现代化的今天,机器⼈的使⽤变得越来越普及。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文基于PLC的物流堆垛机控制系统设计学生姓名:XXX专业班级:自动化2011级2班指导教师:XXX学院:机电工程学院2015年5月基于PLC的物流堆垛机控制系统设计摘要随着近年来物流产业的快速发展,自动化立体仓库应运而生,而堆垛机系统是整个立体仓库系统的核心,与之相关的技术逐渐成为研究的重点。
设计一种能够有效、快速、实时、稳定自动化立体仓库的堆垛机控制系统成为工业控制领域中一项重要课题。
本文给出了轨道堆垛机基于PLC控制系统的总体设计方案,并给出了具体的硬件搭建流程和软件设计方法。
本文对堆垛机的国内外发展状况以及发展趋势进行了研究。
设计了一种单位立柱巷道堆垛机控制系统。
本文采用西门子公司s7-200PLC,了解了轨道堆垛机的特点后,认为其技术指标以及控制方式进行设计非常重要。
为了研究堆垛机的定位技术对现有定位技术以及认址方式进行比较,最后决定选用激光测距传感器与绝对认址方式相结合的方案对轨道堆垛机进行实时位置控制,U型传感器的原理和测距方法,参数以及安放方式。
给出了单位立柱巷道堆垛机的流程图及程序。
实验结果表明本文设计的堆垛机控制系统整体效果良好,满足学校对堆垛机的性能要求。
设计的控制系统定位误差明显降低,堆垛机的运行速度也有一定的提高,一方面能够保证货物进仓的精准性,另一方面实现了系统运行的快速性,同时保证了系统的稳定性。
关键词自动化立体仓库堆垛机PLC 传感器The design of logistics stacker control system based on thePLCAbstractWith the rapid development of logistics industry in recent years, automated stereoscopic warehouse arose at the historic moment. Recently, the stacker system became the core of stereoscopic warehouse system, and related technology has gradually became the focus of research. To design a kind of effective, rapid, real-time, stable and automated stereoscopic storehouse stacker control system has became an important topic in an industrial control field. Track piling machine based on PLC control system was given in the overall design of this paper, and the paper also gave the specific procurement processes of hardware and the design method of the software .This paper studied the development situation and trend of the stacker at home and abroad, and designed a pillar stacker machine control system. This paper adopted Siemens s7-200 PLC, after understood the characteristics of the track stacker, realized that its technical indicators and the control method to carry on the design is very important. In order to study the stacker positioning technology, the paper made a comparison between existed positioning technologies and methods to recognize address ,finally decided to use the way of combining laser range sensor with absolute recognition of position to make real-time position control on track stacker, u-shaped sensor principle and ranging method, parameters and placed. It also gave flow chart of the mast stacker machine unit and program.The experimental results show that the effect of the design of stacker control system in this article is good. The design also met the stacker performance requirements of the school. The positioning error of designing control system is decreased obviously, and the running speed of stacker increased to a certain extent. On the one hand, it can ensure the precision of the warehouse entry, on the other hand, it realized the rapidity of the system operation, and ensure the stability of the system.Keywords automated stereoscopic storehouse; stacker; PLC; sensor目录摘要Abstract目录 (5)1.1 课题研究的背景 .............................................................................................................. - 1 - 1.1.1 自动化立体仓库的简介............................................................................................... - 1 - 1.1.2 自动化立体仓库的国内外发展状况........................................................................... - 1 - 1.1.3 自动化立体仓库的优越性........................................................................................... - 2 - 1.2 堆垛机的简介 .................................................................................................................. - 3 - 1.3 堆垛机的发展 .................................................................................................................. - 4 -1.4 课题研究的目的和意义 .................................................................................................. - 5 -2 堆垛机的机械结构 ............................................................................................................. - 7 - 2.1 堆垛机的结构设计方案 .................................................................................................. - 7 - 2.2 水平行走机构 .................................................................................................................. - 7 - 2.3 货叉部分 .......................................................................................................................... - 8 - 2.4 载货台 .............................................................................................................................. - 8 - 2.5 提升机构 .......................................................................................................................... - 9 - 2.6 安全保护部分 .................................................................................................................. - 9 -2.7 本章小结 ........................................................................................................................ - 10 -3 控制方案设计.................................................................................................................... - 11 - 3.1 堆垛机整体控制方案设计 ............................................................................................ - 11 - 3.1.1 堆垛机的控制方式..................................................................................................... - 11 - 3.1.2 控制功能分析............................................................................................................. - 12 - 3.2 控制系统关键技术及硬件选型 .................................................................................... - 12 - 3.2.1 PLC技术与选型......................................................................................................... - 12 - 3.2.2 交流伺服控制技术及伺服放大器的选型................................................................. - 13 - 3.2.3 交流变频调速技术及变频器选型............................................................................. - 14 - 3.3 堆垛机位置控制方案 .................................................................................................... - 14 - 3.3.1 货位编码..................................................................................................................... - 14 -3.3.2 认址方式..................................................................................................................... - 15 - 3.3.3 位置控制方案............................................................................................................. - 15 -3.4 本章小结 ........................................................................................................................ - 16 -4 控制系统的实现 ............................................................................................................... - 18 - 4.1 控制要求及系统设计 .................................................................................................... - 18 - 4.2 I/O口分配方案 .............................................................................................................. - 19 - 4.3 堆垛机系统的工作流程 ................................................................................................ - 21 - 4.4 软件编程及实现 ............................................................................................................ - 22 - 4.5 本章小结 ........................................................................................................................ - 27 - 结论........................................................................................................................................ - 28 - 参考文献................................................................................................................................ - 29 - 致谢........................................................................................................................................ - 31 -1绪论1.1 课题研究的背景1.1.1 自动化立体仓库的简介自动化立体仓库库的产生和发展是第二次世界大战之后生产和技术发展的结果,是一个典型的高技术密集型机电一体化产品,用一流的集成化物流理念,采用先进的控制、总线、通讯和信息技术,通过以上设备的协调动作进行出入库作业。