-三次元培训讲义
蔡司全自动三次元培训教材 共36页PPT资料

一、基本尺寸输出
基本输出
角度输出
距离输出
特性输出
二、形位公差输出
形状输出
位置输出
CNC 编 程
一、编程步骤
1. 建立工件坐标系 2. 建立安全平面 3. 采集测量元素 4. 元素策略及评定设置 5. 输出测量特性 6. 安全五项检查
a) 安全平面 b) 安全距离 c) 回退距离 d) 探针组的设定 e) 探针的设定
四、简单维护
每日酒精清理导轨 导轨上不能摆放物品 不要挤压导轨
Thanks!!!
Thank you
自动探针更换
备注:库位的定义添加需要 用主探针进行
探针系统
五、手动校动探针
主探针校准 工作探针校准 探针被动校准 探针几何再校准
备注:
校准判断 主探针 s<=0.0005mm 工作探针 s<=0.001mm
手动校准探针
探针系统
六、自动校准探针
新建程序 建立机器坐标系 增加“探针校准”特性 选择校准的探针 定义“缺省输出报告”
元素采集
二、构造元素
无法通过直接测量识别,需要用已测量的元素构造而成。
常见的构造元素
• 3D直线 • 相交 • 对称 • 最大最小结果
备注:常用的椭圆,圆槽,方槽,圆环最好不要自动识别, 当然有时也不能,测量时需要注意探测策略。
元素采集
从模型上采集元素 常用的:
1. 定义点 2. 在圆柱上定义圆
输出报告设置
1.报告格式修改
2.报告表头修改 3.报告保存路径修改
用户输出格式
紧凑报告格式
缺省报告格式
探针系统
探针校准目的 探头介绍 手动装卸探针 自动装卸探针 手动校准探针 自动校准探针
初级三次元培训教程

初级三次元培训教程在当今科技飞速发展的时代,三次元技术在众多领域都发挥着重要作用,如制造业、医疗、设计等等。
对于初学者来说,掌握三次元技术的基础知识和操作方法是踏入这个领域的第一步。
接下来,就让我们一起开启初级三次元培训的学习之旅。
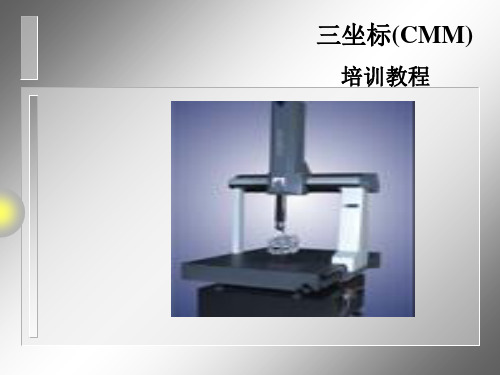
一、三次元的基本概念三次元,又称为三坐标测量机,是一种能够对物体的几何形状、尺寸和位置进行高精度测量的设备。
它通过三个相互垂直的坐标轴(X、Y、Z)来确定测量点的空间位置,并将测量数据进行处理和分析,以获得物体的各种参数。
三次元测量机的工作原理基于笛卡尔坐标系。
测量时,探头接触被测物体表面,获取测量点的坐标值。
这些坐标值经过计算机处理后,可以生成物体的三维模型、尺寸报告等。
二、三次元测量机的组成1、主机主机是三次元测量机的主体部分,包括框架、导轨、工作台等。
框架通常采用高精度的花岗岩或铝合金材料,以保证机器的稳定性和精度。
导轨则负责引导探头在三个坐标轴上的运动,确保测量的准确性。
2、探头系统探头是测量机与被测物体直接接触的部分,其类型有接触式探头和非接触式探头。
接触式探头通过与物体表面接触来获取测量点的坐标,常见的有触发式探头和扫描式探头。
非接触式探头则利用光学、激光等技术进行测量,如激光扫描探头。
3、控制系统控制系统负责控制测量机的运动、数据采集和处理等工作。
它通常由计算机、运动控制卡和相关软件组成。
4、测量软件测量软件是三次元测量机的核心部分,它不仅能够控制测量过程,还能对测量数据进行处理、分析和输出。
优秀的测量软件具有操作简单、功能强大、精度高等特点。
三、三次元测量机的操作步骤1、开机前的准备在开机前,需要确保测量机的工作环境符合要求,温度、湿度在规定范围内,并且周围没有振动和干扰源。
同时,检查机器的外观是否有损伤,各部件是否连接正常。
2、开机与初始化打开测量机的电源,等待机器完成自检和初始化。
在初始化过程中,测量机会对坐标轴进行回零操作,以确定测量的基准点。
3、建立坐标系坐标系是测量的基础,根据被测物体的特点和测量要求,选择合适的坐标系建立方法,如3-2-1法、迭代法等。
三次元培训资料
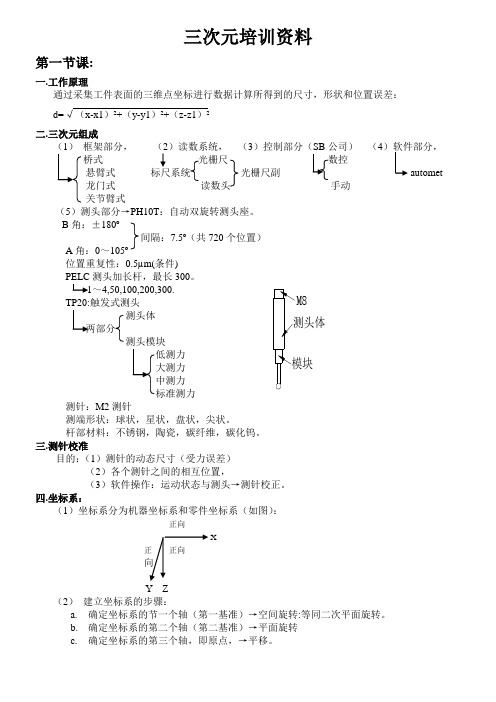
块头体M8三次元培训资料第一节课:一.工作原理通过采集工件表面的三维点坐标进行数据计算所得到的尺寸,形状和位置误差:d=√(x-x1)²+(y-y1)²+(z-z1)²二.三次元组成框架部分,(2)读数系统,(3)控制部分(SB 公司) (4桥式悬臂式 标尺系统 光栅尺副 automet 龙门式 读数头 手动 关节臂式(5)测头部分→PH10T :自动双旋转测头座。
B 角:±180º间隔:7.5º(共720个位置) A 角:0~105º 位置重复性:0.5µm(条件)测头加长杆,最长300。
~4,50,100,200,300.测头体两部分测针:M2测针测端形状:球状,星状,盘状,尖状。
杆部材料:不锈钢,陶瓷,碳纤维,碳化钨。
三.测针校准目的:(1)测针的动态尺寸(受力误差)(2)各个测针之间的相互位置,(3)软件操作:运动状态与测头→测针校正。
四.坐标系:(1)坐标系分为机器坐标系和零件坐标系(如图):正向X正 正向向Y Z(2) 建立坐标系的步骤:a. 确定坐标系的节一个轴(第一基准)→空间旋转:等同二次平面旋转。
b. 确定坐标系的第二个轴(第二基准)→平面旋转c. 确定坐标系的第三个轴,即原点,→平移。
第二节课:一.基本几何元素:1.点元素:点、圆、球、椭圆。
2.线元素:线、圆柱、圆锥(方向性元素)。
3.面元素:面(方向性元素)。
应用基本几何元素:组合元素(功能)组成8个基本几何元素注意:测点不可以组合基本几何元素,只能通过几何元素基本点。
第三节课:一.相关功能:距离、角度、相交、对称、镜像、垂足;点线线线线线→点1、距离点面2、角度线面3、相交线面→点线线面面面面→线线面点点→点点线→点线线→线线线→点点面→点4、对称点点→点5、垂直6、镜像线线→线面面→面点面→点线面→线二.投影功能:xy→z=0 →z=0xz→y=0 点xz→y=0 线x、y、z轴1、点投影到yz→x=0 2、线投影到yz→x=0 3、提取特殊几何元素任意面xy、xz、yz轴三.形状误差:1、母线采点→平面直线度→平行平面→操作 2、连直线3、选择投影面141、采若干个正截面作圆→空间直线度→圆柱→操作 2、每个圆转换成中心点3 42、平面度: 圆度 直接测量得出读数 3、圆柱度a) 采点至少8点,最多40点b) 作成圆柱 ←4点 c) 点圆柱度按健 ←4点第四节课:一、位置误差: 圆柱(线对线)∥ 线对线 1.首先检测基准要素 平行度 平行平面(线对线) 1、定向误差 ⊥ 线对面 操作 2.然后检测被测要素 ∠ 面对线 3.点击相应∥/⊥/∠按钮 垂直度面对面 线对面顷斜度 平行平面注:基准要素无要求,但被测要素却不能由组合功能得到的元素只能由测量点构成的元素 ◎ 2、定位误差同心度⊙基准被测点元素 a.同轴度◎ 轴线长短决定同轴度◎,基准是线元素,被测是圆柱 同心度操作步骤:①选择投影面②基准要素③被测要素④点击“⊙” 同轴度操作步骤:①基准要素②被测要素→圆柱③点击“◎”b.对称度:面对面→操作步骤:①基准要素②被测要素③另一个被测要素④点击“ ” 采点要对应。
三次元培训教材

影视制作案例
影视制作案例
在影视制作中,三次元技术可以用于 特效制作、场景搭建、道具设计等方 面,提高电影或电视剧的视觉效果 模技术,将实物道具转化为数字模型, 进行特效制作和场景合成,打造出更 加震撼的视觉效果。
07
总结与展望
总结
教材内容丰富
本教材涵盖了三次元领域的多个 方面,包括基础知识、技能提升、 案例分析等,为学习者提供了全
面的学习资源。
实践性强
教材注重实践应用,通过丰富的 实例和案例分析,帮助学习者掌 握实际操作技能,提高解决实际
问题的能力。
结构清晰
教材结构清晰,层次分明,便于 学习者系统地掌握知识体系,提
高学习效率。
未来发展方向
更新内容
随着三次元技术的不断发展,教材内容需要不断更新和完善,以 反映最新的技术和趋势。
总结词
市面上有许多三次元软件可供选择,如Maya、3ds Max、Blender等。
详细描述
Maya是一款专业的三维动画软件,功能强大,广泛应用于电影、游戏和广告行业。3ds Max是一款面向建筑师 和设计师的三维渲染和建模软件,适用于创建室内设计和建筑可视化效果。Blender是一款开源的三次元软件, 适合初学者和小型制作团队使用。
渲染概念
渲染是利用计算机图形学和图 像处理技术,将三维模型转换 成二维图像的过程。
渲染流程
包括几何、光照、纹理、渲染 等步骤,其中光照是渲染中的 核心部分。
渲染器类型
分为扫描线渲染器、光线追踪 渲染器和全局光照渲染器等。
高级渲染技术
01
02
03
光线追踪
利用光的折射、反射和漫 反射等特性,模拟真实的 光照效果,提高图像质量。
三次元操作培训课件
Min/Max: 最小最大: 坐标系将尝试确 定零件的方位, 使所有输入特征处于 根据其关联尺寸确定的公差範围內, 此选项仅用于2D最佳擬合.
Rotate & Translate: 旋转和平移: 在 計算坐标系时将允許最大的自由度, 使其可以自由地旋转和平移.
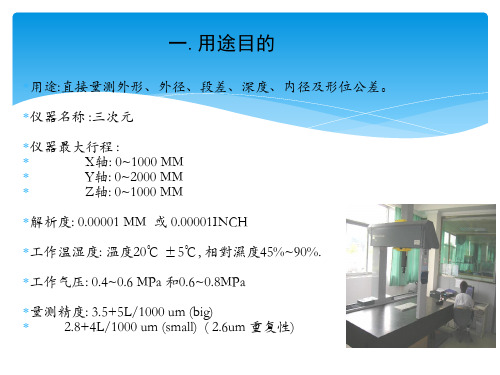
量测精度: 3.5+5L/1000 um (big) 2.8+4L/1000 um (small) ( 2.6um 重复性)
标准球
二.结构介绍
紧急停止 手/自动 总电源
按钮
切换开关 开关
气压表
二.控制合
手柄
速度控制 三轴锁定 紧急停止 连机加电
组合功能 完成 空点 测针补尝
删除点
三.步骤
一. 测头校验 测头对话框基本內容 测针定义 柱形针定义及校验 盘形测针定义及校验 星型测针定义及校验 五方向测针定义及校验
面转向下一个激活平面时要通过的
面. Axis------指通过平面的法向矢量. 在 使用时Plus与Minus对后面的Value 指定的值沒有正負影响. Value------通过平面相对坐标系的值. 当通过平面与激活平面选择同样的
矢量时, 此处的值无效, 而以激活
平面的值为准.
3. 安全面设定实例1
二. 坐标系建立 2. 迭代法坐标系建立原理及方法
无CAD模型时迭代法坐标系的建立
如果沒有CAD模型, 创建的元素必须正确输入其理论值, 其坐标系建立方法与有CAD模型的建 立方法一致!
二. 坐标系建立
3. 最佳擬合坐标系建立原理及方法
用途与原理:
此方法可提高坐标系精度, 特別是对于曲线曲面类零件, 通过理论曲线和实际曲线的匹配得 到更精确的坐标系. 常用于有CAD模型的情況. 如下图所示, 该零件沒有任何可用于测量的元 素, 只能用最佳擬合坐标系建立方法建立坐标系.
三次元培训资料

3. 三次元操作步骤:
一 二 三 四 五 建立三坐标(系统会默认一个三坐标) 用标准件对坐标进行校验(实际操作训练)。 在量测工件上选取几何元素(实际操作训练)。 对几何元素进行量测(实际操作训练)。 收集数据信息。
4. 操作注意事项: 一 以探针去碰触工件时应尽可能与工件的被测量面保持垂直的方向。
正确有效的使用探针来碰触量测工件,可以避免掉许多量测上不必要的误差的产 生。但是在实际碰触取点时,至少需保持与垂直面角度在±30°以内。以防止探 针打滑而造成量测的重复精度不佳的情况产生。再借助系统的探针补偿来实现数 据的准确性。
二 注意探针的有效长度,以避免因长度不够而造成测量上的很大的误差。
2.名词解析:
Байду номын сангаас
几何元素:绝大部分的工件都是加工后,由几个简单的几何元素所组成的。主要的元素(点,
线,圆孔,平面,圆柱,圆锥球等等)都被称为几何元素。
可量测的几何元素: 即可用接触探头直接碰触到这些几何元素的表面的为可量测的几何元素。 需建立的几何元素:即距离,对称线(点),交点,角度,投影面等这些几何元素就称之为需
Micro-Hite 3D 手动三次元培训资料
1. 三次元的原理:
三次元坐标系统就像一个立体的地图,地图的上缘由左到右标示着A B C D ….等区分, 地图的左缘由上到下标示着由1 2 3 4 ….等区分再加上海拔高度的标示,这字母/数字/ 高度的结合就称作三坐标,相对于此立体地图来说,此三坐标的结合就能清楚地在地 图上显示出所代表的位置点。其作业原理跟手指搜索地图坐标的原理很相似,由三个 轴向形成量床的坐标系统,由探头来量测工件的位置点,每个量测点在工件的坐标上 都是独一无二的位置。所以三次元量床就是结合这些量测的点来形成工件的几何元素, 且每一元素都代表着在工件上的每一个相关位置。
蔡司培训教材
探 针 系 统
四、自动更换探针
增加库位盒 定义主探针长度 定义库位盒位置 定义库位盒探针 定义接近参数 自动取放探针
自动探针更换
备注:库位的定义添加需要
用主探针进行
探 针 系 统
五、手动校动探针
备注:
校准判断 主探针 s<=0.0005mm 工作探针 s<=0.001mm
自动校准探针
数 据 备 份
一、数据的备份
程序文件的备份 Config文件夹的备份 配置文件的备份
要数据备份文件存放的路径
机 器 配 置
一、机器配置
设置路径
需要配置的有:
机器 探头 温度
管理员
控制
配置对话框
曲 线 知 识
一、曲线种类
2D曲线 3D曲线
二、曲线生成
名义值导入
公式生成
二、软件
Calypso软件 版本:4.10
硬 件 知 识
三、使用环境
温度:20℃±2℃ 湿度:50%±10% 气源:6磅 气压:4.8~5.2磅 电源:稳压、UPS
四、简单维护
每日酒精清理导轨 导轨上不能摆放物品 不要挤压导轨
Thanks!!!
a) 安全平面 b) 安全距离 c) 回退距离 d) 探针组的设定 e) 探针的设定
二、运行程序
1. 2. 设点 置击 运运 行行 程程 序序 参图 数标
CNC 编 程
运行程序图 标
1
2
3
4 5
6 7
8
CNC 编 程
三、导入CAD模型编程
导入模型的三种格式 从模型上采集元素 修改所采集元素的策略
ZEISSE三次元基本培训
探 针 系 统
四、自动更换探针
增加库位盒 定义主探针长度 定义库位盒位置 定义库位盒探针 定义接近参数 自动取放探针
自动探针更换
备注:库位的定义添加需要
用主探针进行
探 针 系 统
五、手动校动探针
备注:
校准判断 主探针 s<=0.001mm 工作探针 s<=0.002mm
探 针 系 统
一、目的
获取红宝石的直径 探针间的相互位置关系
二、探头介绍
探头类型 TL3允许最大承重15g
TL3允许最大接长150mm
RDS VAST/XXT
探 针 系 统
三、手动装卸探针
探针组装 探针安装 探针卸载 探针定义
1. 探针组定义、添加、删除 2. 测针定义
旋转探头 增加测针 增加测针 创建探针组 旋转探头
用户输出格式 紧凑报告格式 缺省报告格式
CNC 编 程
一、编程步骤
1. 建立工件坐标系 2. 建立安全平面 3. 采集测量元素 4. 元素策略及评定设置 5. 输出测量特性 6. 安全五项检查
a) 安全平面 b) 安全距离 c) 回退距离 d) 探针组的设定 e) 探针的设定
二、运行程序
1. 2. 设点 置击 运运 行行 程程 序序 参图 数标
培训
一、系统介绍
(一)基本知识
CMM使用环境及温湿度 CMM精度指标及影响条件 CMM分类及结构分析 机器坐标系原点,方向 三坐标测量机开关机顺序和方法 操作手柄及使用控制面板介绍 探头传感器介绍
使用环境
温度:20℃±2℃ 湿度:45%±15% 气源:6磅 气压:5.5磅 电源:稳压、UPS
2024年三次元培训教程
三次元培训教程引言:随着科技的不断发展,三次元技术已经逐渐成为各个领域的重要组成部分。
为了帮助大家更好地了解和应用三次元技术,我们特此推出本教程,通过系统的培训,让您掌握三次元技术的核心知识和应用技巧。
第一章:三次元技术概述1.1三次元技术的定义三次元技术,又称三维技术,是指通过计算机技术对三维空间进行建模、渲染、动画等处理,从而实现虚拟现实、增强现实、三维打印等功能的技术。
1.2三次元技术的应用领域三次元技术广泛应用于工业设计、建筑设计、影视动画、游戏开发、虚拟现实、医疗仿真、教育等领域。
1.3三次元技术的发展趋势随着科技的不断进步,三次元技术将更加智能化、自动化、普及化,其应用领域也将进一步扩大。
第二章:三次元建模技术2.1三次元建模的概念三次元建模是指通过计算机软件创建三维模型的过程,包括几何建模、纹理映射、光照渲染等步骤。
2.2常用的三次元建模软件常用的三次元建模软件有AutodeskMaya、3dsMax、Blender、ZBrush等。
2.3三次元建模的基本流程(1)确定建模目标(2)收集参考资料(3)创建基础模型(4)细化模型(5)纹理映射(6)光照渲染第三章:三次元渲染技术3.1三次元渲染的概念三次元渲染是指将三维模型转换为二维图像的过程,包括光线追踪、阴影、反射折射等效果。
3.2常用的三次元渲染软件常用的三次元渲染软件有V-Ray、Arnold、Corona、mentalray 等。
3.3三次元渲染的基本流程(1)设置渲染器(2)调整材质和灯光(3)设置渲染参数(4)渲染输出第四章:三次元动画技术4.1三次元动画的概念三次元动画是指通过计算机软件创建三维动画的过程,包括角色动画、场景动画、特效动画等。
4.2常用的三次元动画软件常用的三次元动画软件有AutodeskMaya、3dsMax、Blender 等。
4.3三次元动画的基本流程(1)确定动画目标(2)创建动画模型(3)设置关键帧(4)调整动画曲线(5)渲染输出第五章:三次元技术的应用实例5.1工业设计领域通过三次元技术,设计师可以快速创建和修改产品模型,提高设计效率。
三次元培训

椭圆 圆柱 连接 要素 坐标 系统 探针
PN AN TO LP
投影 面
DI
计算 距离 记忆 呼出 点的 距离 程序 输入 复制 元素
IN ED DE PP
相交 程序 结束 图像 放大 补偿 点 时间 显示
角度 MR 公差 计算 探针 数据 坐标 转换
SD LM
CR 圆
CO
圆锥
DP SY
CM CP
KI
TI RS
SP 球
分中
转换 RM 测头
调出 程序
清除 荧屏
六、三次元基准建立及简单测量
1பைடு நூலகம்探针直径校正
①输入DP 2 ②对标准球测量五点(顶点一点、截面大圆测量四点) ③屏幕显示探针直径(标准探针直径相差太大则需要重新校准
2.坐标建立
①将工件擦拭干净于花岗岩平台上固定 ②选一个面为坐标基准面(投影面)
三、三次元的基础知识(开、关机)
1开启程序 ①接通气源将气压调至适当压力(3~4kg f/cm平方) ②按下POWER开关,接通三座标电源 ③打开电脑电源开关及屏幕显示开关 ④输入GEOPAK调出测量软件 ⑤进入测量系统 ⑥调出探针数据或重新校正 ⑦进行测量
三、三次元的基础知识(开、关机)
2.退出程序 ①退出GEOPAK测量软件 ②输入RS清除荧屏 ③输入EX退出软件 ④可关机
六、三次元基准建立及简单测量
6.坐标系 CS CS3 轴设置 CS4 轴补偿设置 CS5 面补偿设置 CS6 旋转坐标系 CS7 提取坐标系 CS8 保存坐标系 CS9 退出
谢 谢!
三次元培训
课程结构
一、三次元的定义、优点 二、三次元的保养 三、三次元的基础知识(开、关机) 四、三次元操作注意事项 五、三次元指令代号表 六、三次元基准建立及简单测量
三次元基础培训

PT 點
EL
橢圓 PN
投影 面
DI
計算 IN
距離
相交
LN 線 CY 圓柱 AN 角度 MR 記憶 ED 程式
呼出
結束
PL 面 CE 連接 TO 公差 SD 點的 DE 圖像
要素
計算
距離
放大
CR 圓 CS 坐標 LP 探針 LM 程式 PP 補償
系統
數據
輸入
點
CO 圓錐 DP 探針 CM 座標 KI 複製 TI 時間
1)輸入一個面 PL 2)參照工件及圖紙,在適當面上找定4點 3)輸入CS 1、3確定基準面
六、三次元基準建立及簡單測量
3.建立X、Y軸
①輸入線元素 LN 或用兩個元素連接成一條線 ②輸入 CS 3(X軸建立) ③依據圖紙選定一個元素輸入CS2、4原點確定
六、三次元基準建立及簡單測量
4.簡單測量
轉換
元素
顯示
SP 球 SY 分中 CP 轉換 RM 調出 RS 清除
測頭
程式
螢屏
六、三次元基準建立及簡單測量
1.探針直徑校正
①輸入DP 2 ②對標準球測量五點(頂點一點、截面大圓測量四點) ③螢幕顯示探針直徑(標準探針直徑相差太大則需要重新校準
2.座標建立 ①將工件擦拭乾淨於花崗岩平臺上固定 ②選一個面為座標基準面(投影面)
三、三次元的基礎知識(開、關機)
1開啟程式 ①接通氣源將氣壓調至適當壓力(3~4kg f/cm平方) ②按下POWER開關,接通三座標電源 ③打開電腦電源開關及螢幕顯示開關 ④輸入GEOPAK調出測量軟體 ⑤進入測量系統 ⑥調出探針數據或重新校正 ⑦進行測量
三、三次元的基礎知識(開、關機)
三坐标 培训教程
直角坐标系
实例 1
Z
测量点的坐标分
别是:
10
X = 10 Y=5 Z=5
Y
5 10
5
0 | | | | 5 | | | | 10 X
直角坐标系
实例 2
Z
测量点的坐标分
别是:
10
X=0 Y=0 Z=5
Y
5 10
5
X
0 | | | | 5 | | | | 10
直角坐标系
实例 3
Z
测量点的坐标分
别是:
典型的几种测头(手动)
MH20i(可重复分度紧凑形测座): MH20i具有良好的分度定位重复性,从而有效 的提高了多方向测头/测杆配置和测座位置情况下 的理想选择,使得复杂的测量任务在一次就能完成 。 特点: 1. 可重复分度定位,加少持续重新校正的需 要 2. 168个可重复定位,以15度进位,在进行 重复测头定位的情况下提供了最大的灵活性 3. 锁定/解开特性,便于实现定位并解除了不 必要的磨损 4. 便于读取的刻度显示,可快速重定位到校 正过的位置 5. 最大加载:EM2 TP20加长75mm(MIP 60mm) 6. 自重:210g(不包括shank)
4. 常见测量机主机结构形式
2.固定桥式
特点:由于桥架固定,刚性好, 动台中心驱动,中心光栅阿贝误差小, 以上特点使这种结构的测量机精度 非常高,是高精度和超高精度的 测量机首选结构
4. 常见测量机主机结构形式
3.高架桥式
特点:高架桥式测量机适合于大型和 超大型测量机,适合于航空,航天,造船行业, 的大型零件或大型模具的测量,一般采用 双光栅,和双驱动,等技术,提高精度.
典型的几种测头(扫描测头)
德国WOLF&BECK公司的光学扫 描测头,是扫描自由形状曲面和复杂 轮廓的理想选择。与 BROWN&SHARPE的测量机和软件 相配合,提供了功能先进的特定测量 解决方案。具体体现:
海克斯康三次元培训资料

三次元操作手册目录简介1.PC-DMIS 3.7MR2 ------------------------22.创建一个新的测量程序--------------------------3测头校正方法及步骤3.-----------------------------44.添加测头--------------------------------------------5--------------------------------------5.配置校验参数66.坐标系建立方法-----------------------------------77.测量注意事项97----------------------------------8.基本图标的测量方法-------------------------119.坐标系建立方法12 9-------------------------------10.最优拟合状态----------------------------------1711.移动设备位置测量方法--------------------18 11“移动设备位置”测量方法PC-DMIS37MR2PC-DMIS 3.7MR2 简介PC-DMIS3.7MR2作为PC-DMIS3.5的升级版本,在加强了PC-DMIS3.5版本的功能的基础上,从用户的使用角度出发,添加了系列实用的新功能。
上,从用户的使用角度出发,添加了一系列实用的新功能。
1 、校验测头增加半自动和自动测量;2、测量特征的图示化路径显示;3、图形窗口可直接删除测点;图形窗口可直接删除测点;4、提供一个工具箱可调整CAD照明方向及CAD模型所需的剖面视图;5、在CAD模型上快速进行零件装夹在模拟。
创建一个新的测量程序创建个新的测量程序步骤:(1)、双击PC-DMIS 桌面快捷键打开PC-DMIS 程序。
还可以选择“开始”按钮打开PC-DMIS,然后依此选择程序| PC-DMIS For Windows | online。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7、3-2-1法建立坐标系
平面、平面、平面:按照步骤进行
1、找正,确定第一轴向 2、旋转到轴线,确定第二轴向 3、平移,确定三个轴向的零点。 粗建坐标系 验证坐标系CTRL+W 精建坐标系 验证坐标系 注意选择工作平面 平面、圆、圆
平面、直线、点
30
9、自动测量没有CAD模型的特征元素
建立坐标系前的准备:
对照工件,分析图纸,明确以下要求: 一、明确工件的设计基准、工艺基准、检测基准,确定建立 零件坐标系时,应测量哪些元素来建立基准,并采用何种建 立坐标系方法。 二、确定需要检测的项目,应该测量哪些元素,以及测量这 些元素时,大致的先后顺序。 三、根据要测量的特征元素,确定工件合理的摆放方位,采 用合适的夹具,并保证尽可能一次装夹,完成所有元素的测 量,避免二次装夹。 四、根据工件的摆放方位及检测元素,选择合适的测头组件 ,并确定需要的测头角度。 工件图纸的分析过程,是工件检测的基础。分析完图纸后,应出 据一份详细的检测要求。
2、测点分布原则: 测量时,最大包容被测元素的有效范围。
3、测量二维元素时,需要选择工作平面。例Z正
在 PC-DMIS中, 当在测量二维元素、计算2D距离时,工作平面的 选择非常重要。定义有效的工作平面是非常重要的。
直线
圆
24
6、手动测量特征元素
元素类型 点 直线 至少测量点数及注意事项 P48 1 确认采点方向基本与工件表面垂直 2 注意工作平面的选择,直线将投影到工作平面方向,测量时的顺序非常
PRINT :编程时加 MOVE 点按键。
PROBE ENABLE(1) 当此按键灯灭时,测头保护的 功能有效,但不记录测需要正常测点时,将灯按亮点 需要正常测点时,灯亮(2)测头平衡,模拟测头
RUN/HODE :灯灭时,程序暂 停( HOLD 状态);灯亮,程序 继续运行(RUN 状态)。
紧急停止,保护
理论数据
A、第1、2、3点的法矢方 向尽量一致 B、第4、5点的法矢方向尽 量一致,且与前三点矢量方向垂直。
C、第6点法矢方向与前5点 法矢方向尽量垂直。
(3)全部执行程序:CTRL+Q,手 动在工件上采点. (4)插入”---“坐标系”---“新建 坐标系”---进入“迭代法
(5)找正、旋转、原点 (6)两种方法:将选择框打勾,点 击确定,机器开始采点,将理论数 据和实测数据拟合. (7)点击确定,完成坐标系
7、3-2-1法建立坐标系
1、为什么要建立零件坐标系PCS: 2、建立零件坐标系的原则: Z
Y
X
一般有三种方式:(1)平面、直线、点 (2)平面、平面、平面 (3)平面、圆、圆
3、建立坐标系有三步: 1、找正,确定第一轴向 2、旋转到轴线,确定第二轴向 3、平移,确定三个轴向的零点。
28
7、3-2-1法建立坐标系
重要,矢量从第一个点指向第二个点 平面 圆 不在同一直线的三点 最大范围的分布 不在同一直线的三点
(法矢:定义为当前工作平面的法矢,注意工作平面的选择) 圆柱
圆锥 球
6点分两层(法矢:由起始层指向终止层)
6点分两层(法矢:由小圆指向大圆) 4点 三点一层;一点一层(法矢:定义为当前工作平面的法矢,注意工作平面的选 择)
与X轴夹角的余弦值称之为I;
与Y轴夹角的余弦值称之为J; 与Z轴夹角的余弦值称之为K.
测量机的X,Y,Z轴
22
6、手动测量特征元素
逼近方向
实际接触点 期望接触点
法向矢量
法向矢量
逼近方向
期望接触点
正确的逼近方向, 和法向矢量一致
不正确正确的逼近方向, 和法向矢量不一致
23
6、手动测量特征元素
1、手动模式、DCC模式(自动模式)。
测量机系统关闭
1、关闭系统时,首先将Z 轴运动到安全的位置和高 度,避免造成意外碰撞;
2、退出PC-DMIS 软件,关闭控制系统电源和测座 控制器电源; 3、关闭计算机电源,UPS、除水机电源,关闭气源 开关。
4
2.操纵盒使用
P25
运行速度调整
ENABLE : 用 手 操 杆 测 量 时 , 需同时按住此键,操纵杆有效, 测量机才能移动。
2、设置F5参数:自动保存,显示绝对速度相对速度,显示小数点位数
3 、设置参数编辑 - 参数设 置-参数(F10):
移动参数,尺寸顺序,安全平面
3、设置温度传感器P33
14
新建程序,保存程序
新建程序-默认目录-公制\英制 保存程序 关闭程序 退出程序
5、定义、校验、调用测头
校验测头的目的 P40 1、理论测针半径与实际测针半径之间的误差;
SLOW:灯亮时慢速触测状态, 灯灭时快速运动状态。触测零件 时应保持慢速触测状态
JOGMODE:操纵杆工作模式
A:PROBE:此按键灯亮,测量机按测头方向移动。 B:PART:此键灯亮,测量机按工件坐标系移动。 C: MACH:此键灯亮,测量机按机器坐标系移动。 X、Y、Z:X、Y、Z 轴指示灯,灯灭,轴锁定。
2、形状偏差要越小越好,一般几个 微米
直径
形状 偏差
20
周一内容回顾
操纵盒的使用方法 校验测头
标准球定义
21
6、手动测量特征元素
1、特征元素:点、直线、平面、圆、圆柱、圆锥、球、圆槽等这些都称之为特征元素。
2、元素测量应遵循的原则: ①矢量方向触测原则: 测量时,尽量按着测点的矢量方向进行测量。 矢量方向:在测量机中被用来确定按什么方向驱动才能垂直于表面或被测元 素。 单位矢量在三维坐标系中 P22
25
6、手动测量特征元素
智能判别模式 替代推测 P52 选择模式:选择测定特征
快捷键使用:
删除点: 手操盒上的DEL PNT 键(或键盘上ALT+“-“键 采集完成后:手操盒上的Done或 键盘上的End
加移动点:
手操盒上的Print或 键盘上的Ctrl+M
26
图形显示窗口的操作
Ctrl+Z :将窗口恢复到最佳视图大小 按住鼠标中键:旋转视图 鼠标滚轮:缩放 按住鼠标右键:平移
机器坐标系:
工件坐标系:
数模坐标系:
唯一的坐标系
一般以工件图纸为基准建立
三维建模的基准
3.测量零件的过程
分析图纸 基准,元素特征
测头测杆配置
测量
建立坐标系:粗建,精建 测量元素
评价
评价形位公差:位置度, 同轴度,对称度
输出报告
12
4.新建程序及屏幕界面
打开PC-DMIS,新建程序。P30
13
4.新建程序及各种参数设置 1、设置各种参数:P238改变屏幕颜色, 窗口布局,概要、命令模式
实测数据
薄壁件圆、槽和柱体至少需要三个 样例测点
全部测量一次:手动移动到安全点 按done,机器自动测量
始终测量全部特征: 机器自动测 量,注意程序中加移动点
9
坐标系和工作平面
三个工作平面:XY YZ Z正或Z负 X正或X负
Y正或Y负 XZ 测量圆和直线要选择正确的工作平面作为 投影平面 元素在坐标系的位置和方向:
元素的位置:(X,Y,Z)坐标值
元素的矢量方向:(i,j,k)和坐标轴夹角的余弦值
测头方向触测方向 曲面点的矢量方向
点的矢量方向
坐标系和工作平面
P84 插入-----特征-----自动--
矢量点 曲面点(样例点)
直线
31
9、自动测量没有CAD模型的特征元素
柱体 内柱 正值
外柱
负值
32
自动测量圆锥
(曲面)
33
34
4.完成的程序
F1
中点
套用点:圆心,球心,圆柱,圆锥轴线
原点:当前坐标系原点
35
投影点
构造线
36
最佳拟和是把两个或两个以上元素的实际测定值拟合 成一条直线,最佳拟合重新补偿是先把两个或两个以 上元素测量时测针的中心值拟合成一条直线,然后再 补偿。(用两个圆构造直线用最佳拟合,用点构造直 线用最佳拟合重新补偿)
的坐标系。旋转角度正负的确定:由右手螺旋法则判定 右手螺旋法则:拇指指向绕着的轴的正方向, 顺着四指旋转的方向角度为正,反之为负。 操作步骤: A:选择旋转的坐标轴: B:输入旋转的角度: C:点击旋转:
41
迭代法建立坐标系步骤
(1)导入数模,观察方向
(2)手动模式:在数模上取得基 准的理论值或输入理论值(曲面模 式)
2D 3D
37
先选直线后选圆
38
构造圆39Fra bibliotek尺寸评价
8、坐标系的平移与旋转
1、坐标系的平移:即坐标系的方向不变,坐标原点移动到一个新的位置。
操作步骤: A:选择平移的坐标轴 如:
B:在偏置距离方框里输入偏移的距离 C:点击原点:
2、坐标系的旋转:即围绕着某个坐标轴旋转一定的角度,从而得到一个新
补偿半径
2、测头旋转角度之误差,及建立个角度之间的关系。 参考角度
16
5、定义、校验、调用测头
定义测头:插入—硬件定义—测头
*
将各部 分拧紧
17
5、定义、校验、调用测头
1、首次校验:选择“是”
2、第二次校验,标准球动过,选择是。 3、第二次校验,标准球未动过,选择否。
校验结果
1、各个角度的红宝石直径差别不大
DEL PNT : 删 除 DONE 之前的测点 MACH START:测量机驱动加电按键。 灯亮时测量机才能运动。出现任何保护时, 灯灭。
8
2.操纵盒使用重点
SLOW:手动触测 零件时应保持慢速 触测状态,灯亮。 自动运行不起作用
进行其他操作时, 养成将运行速度调 慢的习惯 PROBE ENABLE 需要正常测点时, 灯亮