CASIO第一缓和曲线道路中边桩编程和计算
CASIO任意曲线坐标计算程序及说明

个人测量资料汇集韦习耀2005年8月起缓和曲线(ZH到HY)中桩坐标CASIO4800/4850计算程序A"ZHX":B"ZHY":C"LS":Q:R:K:M"DK ZH"↙LB1 1:{L}:L"DK":X=A+((L-M)-(L-M)5÷(40R2C2))cosQ-((L-M)3÷(6RC))KsinQ◢Y=B+((L-M)-(L-M)5÷(40R2C2))sinQ+((L-M)3÷(6RC))KcosQ ◢Goto 1说明:(A,B)为ZH点坐标,LS为缓和曲线长,Q为ZH点放位角,R 为半径,左转K为-1,右转K为1,M为ZH点里程,L为所求点的里程。
缓和曲线(HY到HZ)中桩坐标CASIO4800/4850计算程序A"HZX":B"HZY":C"LS":Q:R:K:M"DK HZ"↙LB1 1:{L}:L"DK":X=A+((-(L-M))-(-(L-M))5÷(40R2C2))cosQ-((-(L-M))3÷(6RC))KsinQ◢Y=B+((-(L-M))-(-(L-M))5÷(40R2C2))sinQ+((-(L-M))3÷(6RC))KcosQ◢Goto 1说明:(A,B)为HZ点坐标,LS为缓和曲线长,Q为HZ点放位角,R 为半径,左转K为-1,右转K为1,M为HZ点里程,L为所求点的里程。
另外注意,这个程序是把HZ点当作ZH点,倒过来算,方位角Q 和K均应注意其值。
圆曲线(HY到YH)中桩坐标CASIO4800/4850计算程序A"HYX":B"HYY":C"LS":Q:R:K:M"DK HY"↙LB1 1:{L}:L"DK":X=A+2Rsin(90(L-M)÷(πR))cos(Q +90((L-M)+C)÷(πR)K)◢Y=B+2Rsin(90(L-M)÷(πR))sin(Q+90((L-M)+C)÷(πR)K)◢Goto 1说明:(A,B)为HY点坐标,LS为缓和曲线长,Q为ZH点放位角,R 为半径,左转K为-1,右转K为1,M为HY点里程,L为所求点的里程。
CASIO第一缓和曲线道路中边桩编程和计算

实验四 第一缓和曲线道路中边桩编程和计算一、实验目的1、掌握第一缓和曲线型道路的数学模型及其计算过程2、学习和掌握用CASIO Fx-4850计算器编写计算缓和曲线型道路中边桩的计算。
二、实验原理(一)、第一缓和曲线型道路数学模型 1、数学模型已知点1-i JD 和i JD 的测量坐标,转角i I ,设计半径R ,缓和曲线长S l ,以及点i JD 和P 的里程,要求的P 的测量坐标。
由两已知点可以算的直线的方位角i α,)(tan 111-----=i i i i i X X Y Y α (4—1)1+i1.4图示意图右偏曲线第一缓和曲线由切线长1T 和i JD 的坐标即可算出ZH 的坐标,)180sin()180cos(11++=++=i i ZY i i ZY T Y Y T X X αα (4—2)建立独立坐标系''ZHy x 。
我们已经知道,缓和曲线上任意相对原点ZH 曲线长为P l 一点P 在独立坐标系''ZHy x 中的坐标,-+-=-+-=55113373'449225'422403366345640SPS P S P P SPSPP Pl R l l R l Rl l Y l R l l R l l X (4—3)在由已求得的ZH 和i α,通过坐标平移旋转,即可求得P 的测量坐标,ZHi Pi P P ZHi P i P P Y Y X Y X Y X X ++=+-=ααααcos sin sin cos ''''(4—4)P I 我们也可求得, π1802⨯=S P P Rl l I 由P I 和i α求得曲线在点P 处的切线的方位角,再由切线的方位角,求得边桩的方位角,如已知边桩距,就可用式(4—2)求得边桩的坐标。
2、计算步骤(1)输入已知数据:i i i i i i i R I L Y X Y X ,,,,,,11--。
圆曲线缓和曲线线路中边桩放样卡西欧5800坐标计算程序

圆曲线缓和曲线线路中边桩放样卡西欧5800坐标计算程序程序名:FYXY"JD"?Q:"JDX"?W:"JDY"?K:R:"QDFWJ"?F:"A0"?N:"LS"?V:"-L,+R"?G:"DKQD"?C:"DK ZD" ?D:”ZJX"?A:”ZJY”?B8→DimzV÷2-V^(3)÷(240R2)→MV2÷(24R)-V^(4)÷(2688R^(3))→PpRN÷180+V→LM+(R+P)tan(N÷2)→TQ-T→Z[5]Z[5]+V→Z[6]Z[5]+L→Z[8]Z[8]-V→Z[7]Rec(T,F+180)W+I→Z[1]:K+J→Z[2]Rec(T,F+GN)W+I→Z[3]:K+J→Z[4]Lbl 0"DKI"?H:"BIAN JU"?S:"JIA JIAO"?EIf H<C:Then Goto 0:IfEndIf H>D:Then Goto 0:IfEndIf H<Z[5]:Then Goto 1:IfEnd:If H<Z[6]:Then Goto 2:IfEnd:If H<Z[7]:Then Goto 3:IfEnd:If H<Z[8]:Then Goto 4:Else Goto 5:IfEndLbl 1W+I→X: K+J→YRec(S,F+E)"X=":X+I→X◢"Y=":Y+J→Y◢Goto 7Lbl 2H-Z[5]→Z90Z2÷(pRV)→OZ-Z^(5)÷(40R2V2)+Z^(9)÷(3456R^(4)V^(4))→XZ^(3)÷(6RV)-Z^(7)÷(336R^(3)V^(3))+Z^(11)÷(42240R^(5)V^(5))→Y Rec(√(X2+Y2),F+Gtan-1(Y÷X))Z[1]+I→X:Z[2]+J→YRec(S,F+GO+E)"X=":X+I→X◢"Y=":Y+J→Y◢Goto 7Lbl 3H-(Q-T)-V÷2→Z180Z÷(Rp)→ORsin (O)+M→XR(1-cos(O))+P→ZRec(X,F)Z[1]+I→X:Z[2]+J→YX+I→X:Y+J→YRec(S,F+OG+E)"X=":X+I→X◢"Y=":Y+J→Y◢Goto 7Lbl 4Z[8]-H→Z90Z2÷(VRp)→OZ-Z^(5)÷(40R2V2)+Z^(9)÷(3456R^(4)V^(4))→XZ^(3)÷(6RV)-Z^(7)÷(336R^(3)V^(3))+Z^(11)÷(42240R^(5)V^(5))→Y Rec(√(X2+Y2),F+GN+180-Gtan-1(Y÷X))Z[3]+I→X:Z[4]+J→YRec(S,F+GN+180-OG-(180-E))"X=":X+I→X◢"Y=":Y+J→Y◢Goto 7Lbl 5Rec(H-Z[8]+T,F+GN)W+I→X:K+J→YRec(S,F+GN+E)"X=":X+I→X◢"Y=":Y+J→Y◢Goto 7Lbl 7Pol(X-A,Y-B)If J<0:Then J+360→J:IfEnd"FWJ=":J…DMS◢"CJ=":I◢Goto 0注:FYXY程序单代号Q"J D" 交点里程桩号W"JDX" 交点X坐标值K"JDY" 交点Y坐标值R 圆曲线半径F"QDFWJ" 第一直线段方位角N"A 0" 交点转向角V"LS" 缓和曲线长度G"-L,+R" 如果为左转角输入“-1”,如果为右转角输入“1”C"DKQD" 所求段起点里程桩号D"DKEZD" 所求段终点里程桩号ZJX 置镜点X坐标ZJY 置镜点Y坐标H"DKI" 所求点的里程桩号S"BIAN JU" 边桩至中桩的距离,求中桩时输入0 距离不为负E"JIA JIAO" 左边桩输入“-90”,右边桩输入“90”X Y 所求点的坐标值C J 置镜点至待求点的距离FWJ 置镜点至待求点的方位角。
卡西欧5800P计算器-道路中桩及边桩计算程序
If K<3269.093(第三段终点桩号) :Then759.748(第二段终点桩号)→ O:35349.174(第三段起点 y 坐标)→V:9°36′35″(第三段起点方位角)→G:2509.345(第三段 的距离) →H:3000(第二段的曲线半径) →P:10^(45)(直线) →R:0(数字)
卡西欧 5800P 计算器-道路中桩及边桩计算程序 Lbl 4:“1:KD→ XY,2:XY→ KD” ?N:?K If k<270.348:(第一段的终点桩号)Then0(0 是零,起点桩号) → O(字母符):355933.039(起点 x 坐标)→ U:467305.867(起点 y 坐标)→ V:0°15′46″(第一段 的方位角)→ G:270.348(第一段的 距离) → H:10^(45) (直线) → P:3000(曲线半径)→ R:0(数字) → Q:Goto 0(数字):Ifend If k<759.748:(第二段的终点桩 号)Then270.348(第一段的终点桩 号)→O(字母) :3559603.384(第一 →U:467307.108 段终点 x 坐标) (第 一段终点 y 坐标)→V:0°15′46″ ( 第 二 段 起 点 方 位 角 ) → G:489.4(第二段距离)→H:3000(第 →P:3000(第二段曲线半径) →Q:Goto 二段曲线半径) → R:1(右转) 0IfEen
→Q:Goto 0(数字) :IfEnd Lbl 0(数字) :1÷P→C:(P-R)÷(2HPR)→D:180÷π→E N=1Goto 1:Goto 2 Lbl 1:?Z:K→S:Abs(S-O)→W:Prog“SUB1”:“X=”:X◢(s-o,o 是字母 符) “Y=”:Y◢ “FWJ=”:F-90→F◢ Goto4 Lbl 2:?X:?Y:X→I:Y→J:Prog“SUB2”:O+W→K:“K=”:K◢(o 是字母) Z→D:“D=”:D◢ Goto 4 注:线性是直线或圆曲线,缓和曲线不能用此程序。 “SUB1,SUB2” 是两个子程序。 “SUB1” 0.1739274226→ A:0.3260725774→ B:0.0694318442→ P:0.3300094782→ L:1-L→ F:1-P→ M:U+W(ACos (G+QEPW(C+PWD))+BCos(G+QELW(C+LWD))+BCos(G+QEFW(C+FWD))+AC os(G+QEMW(C+MWD)))→ X:V+W(ASin(G+QEPW(C+PWD))+BSin(G+QELW(C+LWD))+BSin(G+QEFW(C +FWD) )+ASin(G+QEMW(C+MWD)))→ Y:G+QEW(C+WD)+90→ F:X+ZCos(F) → X:Y+ZSin(F)→ Y “SUB2”程序
曲线任意里程中边桩坐标正反算(CASIO fx-4800P计算器)程序 文档

曲线任意里程中边桩坐标正反算(CASIO fx-4800P计算器)程序一、程序功能本程序由一个主程序(TYQXJS)和两个子程——正算子程序(SUB1)、反算子程序(SUB2)序构成,可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距或坐标,对该曲线段范围内任意里程中边桩坐标进行正反算。
另外也可以将本程序中核心算法部分的两个子程序移植到其它相关的程序中,用于对曲线任意里程中边桩坐标进行正反算。
本程序也可以在CASIO fx-4500P计算器及C ASIO fx-4850P计算器上运行。
特别申明:(1). 适用于弧长小于2倍半径的各种线元坐标正反算,精度优于1mm;(2). 在引用该核心计算部分时,请注明来源。
二、源程序1.主程序(TYQXJS)"1.SZ => XY":"2.XY => SZ":N:U"X0":V"Y0":O"S0":G"F0":H"LS":P" R0":R"RN":Q:C=1÷P:D=(P-R)÷(2HPR):E=180÷π:N=1=>Goto 1:≠>Goto 2Δ←┘Lbl 1:{SZ}:SZ:W=Abs(S-O):Prog "SUB1":X"XS"=X◢Y"YS"=Y◢F"FS"=F-90◢Goto 1←┘Lbl 2:{XY}:XY:I=X:J=Y:Prog "SUB2":S"S"=O+W◢Goto 22. 正算子程序(SUB1)A=0.1739274226:B=0.3260725774:K=0.0694318442:L=0.3300094782:F=1-L:M=1-K:X=U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+Q EFW(C+FWD))+Acos(G+QEMW(C+MWD))):Y=V+W(Asin(G+QEKW(C+KWD))+Bsin (G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD))+Asin(G+QEMW(C+MWD))):F=G+QE W(C+WD)+90:X=X+ZcosF:Y=Y+ZsinF3. 反算子程序(SUB2)T=G-90:W=Abs((Y-V)cosT-(X-U)sinT):Z=0:Lbl 0:Prog "SUB1":L=T+QEW(C +WD):Z=(J-Y)cosL-(I-X)sinL:AbsZ<1E-6=>Goto1:≠>W=W+Z:Goto 0Δ←┘Lbl 1:Z=0:Prog "SUB1":Z=(J-Y)÷sinF三、使用说明1、规定(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当线元往左偏时,Q=-1;当线元往右偏时,Q=1;当线元为直线时,Q=0。
道路直线段中边桩坐标放样计算CASIO fx-5800P程序090405
道路直线段中边桩坐标放样计算CASIO fx-5800P程序
王中伟发表于2009年04月05日 23:21 阅读(200) 评论(14) 分类:技术交流
举报
一、前言
应网友(西北狼232471254)的要求,以及忻阜高速测量工程师(狼行天下吃肉785731843)的实际需求,编写本道路直线段中边桩坐标放样计算程序。
.
主要功能有:
1.输入起点坐标、桩号及直线方位角即可计算道路直线段的中边桩坐标;2.若输入测站点坐标,可计算输出中边桩的放样数据拨角及距离。
程序的特点:使用简单。
二、示例项目基本资料
(忻阜高速测量工程师(狼行天下吃肉785731843)提供)
某一直线段道路,中间有断链,具体参数如下:
起点里程:K2+793.878
坐标:X=4265666.762,Y=388264.136
终点里程:K3+441.16
坐标:X=4265542.507,Y=388913.680
直线段的方位角:100-49-46.82
断链长:K2+824.04=K2+810
坐标:X=4265661.095,Y=388293.762
本段逐桩坐标表如下:
.
三、数学模型
.
四、程序代码
.
五、程序变量清单
.
五、计算流程示例
需要对设计文件中的逐桩坐标进行验算,将断链前后两段路线分别进行计算。
1.计算断链前路段的中桩坐标
使用道路直线段中边桩坐标放样计算程序LINE的操作流程见下表。
.
2.计算断链后路段的中桩坐标
使用道路直线段中边桩坐标放样计算程序LINE的操作流程见下表。
CASIOfx-5800P计算器计算公路中边桩坐标程序
(一1 ) ( Q) ( L—O) 一W : E= 0= >G o t o 1 : U≠2=> 9 0
—
} G:
Ⅱ U =2: T h e n“ J J ” ? G: “KD”? H: Go t o 1 :E l s e“ S G” ?
一
: N+ J K+ 1 8 O
:
I f W ≥ V: T h e n N +K P- - * P: E l s e N +3 J K P: I En f d :P r o g
( 2 ) 子程序 1 S J ( 手动输入平 曲线数据 )
P r o g“ NE W OR OL D”: Y =1= >Go t o 1 :
曲线 的长度 、 弯道加宽值为 变量 , 解算 公路 基本 型 曲线 放样 所需部位 的中边桩坐 标。 曲线 加宽计 算公 式适合 设有 缓和 曲线 的加宽类型 。
2 . 2 程序 清 单
( 3 ) 子程序 2 S J ( 自动选择平 曲线数据 ) F r e q O n: I f L<L i s t F r e q [ 1 ] : T h e n“ E R R L<MI N ” : S t o p : E l s e I f L>L i s t F r e q [ 1 0 ] : T h e n“ E R R L>MA X” : S t o p : I f -
En d: Lbl 1
Ⅱz [ 1 ]= 0 : T h e n P r o g“ 2 Y S J S ” : E l s e P r o g “ 2 S J ” : / f E n d :
“ X 0—0: X Z 一1 : XY 一2 ”? E:
卡西欧计算器编程简单线路中边桩

串列设计简单线路中、边桩计算(直-圆-直)ZBZDeg“Clear List? Y(1),N(2)”?->KIf K=1=>ClrList“X0”->List 1[0]“Y0”->List 2[0]“KD0”->List 3[0]“par”->List 4[0]“KD1”->List 5[0]“NR”->List6[0]“WR”->List7[0]“XN”->List 8[0]“YN”-> List 9[0]“XM”->List 10[0]“YM”-> List 11[0]“XW”->List 12[0]“YW”-> List 13[0]“Input data?Y(1), N(2)”?->KIf K=1Then“GO to Menu 2”StopIfendDim List 2=NIf N=2ThenIf List 3[2]>list 3[1]ThenPol(List 1[2]-List1[1], List 2[2]-List 2[1])List Ans[2]->List 4[2]List 4[2]<0=>List 4[2]+360-> List 4[2]ElsePol(List 1[1]-List1[2], List 2[1]-List 2[2])List Ans[2]->List 4[2]List 4[2]<0=>List 4[2]+360-> List 4[2]IfEndIf End********************************** 求圆心坐标List 4[1]->RList 4[4]->KList 1[1]+ R*cos (List 4[2]+ K*90)->CList 2[1]+ R*sin (List 4[2]+ K*90)->D****************************************计算圆直点里程List 3[1]+R*List 4[3]*pi/180->L“YZ KD:”L⊿For 1->I To Dim List 5If List 5[I]>List 3[1] And List 5[I]<LThenList 4[2]+ K*90+180+(List 5[I]-List 3[1])/R*180/pi->TC+(R-List6[I])*cos T->List 8[I]D+(R-List6[I])*sin T->List 9[I]C+R*cos T->List 10[I]D+R*sin T->List 11[I]C+(R+List7[I])*cos T->List 12[I]D+(R+List7[I])*sin T->List 13[I]ElseIf List 5[I]< List 3[1]ThenList 1[1]+( List 3[1]-List 5[I])*cos (List 4[2]+180)->List 10[I]List 2[1]+ ( List 3[1]-List 5[I])*sin (List 4[2]+180)->List 11[I]List 10[I]+List 6[I]*cos(List 4[2]+K*90)->List 8[I]List 11[I] +List 6[I]*sin(List 4[2]+K*90)->List 9[I]List 10[I]+List 7[I]*cos(List 4[2]-K*90)->List 12[I]List 11[I] +List 7[I]*sin(List 4[2]-K*90)->List 13[I] ElseList 4[2]+ K*90+180+ List 4[3]->TC+R*cos T->UD+ R*sinT->VList 4[2]+K*List4[3]->TU+(List 5[I]-L)*cos T -> List 10[I]V+(List 5[I]-L)*sin T-> List 11[I]List 10[I]+List 6[I]*cos(T+K*90)-> List 8[I]List 11[I]+ List 6[I]*sin(T+K*90)->List 9[I]List 10[I]+List 7[I]*cos(T-K*90)-> List 12[I]List 11[I]+ List 7[I]*sin(T-K*90)->List 13[I] IfEndIfEndNext“KD XN YN XM YM XW YW”List->Mat(List 5,list 8, list 9, list 10, list 11, list 12, list 13)⊿“END”。
卡西欧5800缓和曲线坐标计算程序
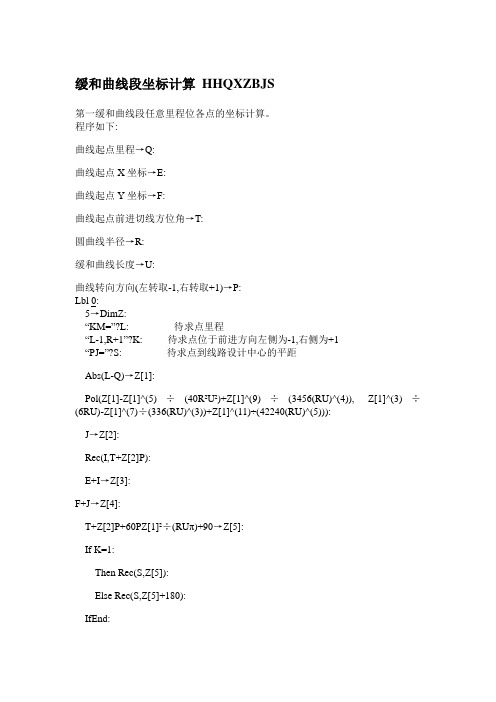
缓和曲线段坐标计算HHQXZBJS第一缓和曲线段任意里程位各点的坐标计算。
程序如下:曲线起点里程→Q:曲线起点X坐标→E:曲线起点Y坐标→F:曲线起点前进切线方位角→T:圆曲线半径→R:缓和曲线长度→U:曲线转向方向(左转取-1,右转取+1)→P:Lbl 0:5→DimZ:“KM=”?L: 待求点里程“L-1,R+1”?K: 待求点位于前进方向左侧为-1,右侧为+1“PJ=”?S: 待求点到线路设计中心的平距Abs(L-Q)→Z[1]:Pol(Z[1]-Z[1]^(5)÷(40R²U²)+Z[1]^(9)÷(3456(RU)^(4)), Z[1]^(3)÷(6RU)-Z[1]^(7)÷(336(RU)^(3))+Z[1]^(11)÷(42240(RU)^(5))):J→Z[2]:Rec(I,T+Z[2]P):E+I→Z[3]:F+J→Z[4]:T+Z[2]P+60PZ[1]²÷(RUπ)+90→Z[5]:If K=1:Then Rec(S,Z[5]):Else Rec(S,Z[5]+180):IfEnd:Z[3]+I→X:Z[4]+J→Y:Cls:Fix 3:“Xp=”: 计算的X坐标“Yp=”: 计算的Y坐标Locate 7,1,X: X坐标显示在第一行Locate 7,2,Y◢Y坐标显示在第二行Goto 0注解:如果本程序不需要反复计算其它里程位的坐标值,可以将Lbl 0和Goto 0删除掉。
这里是按第一缓和曲线编制的,在应用于第二缓和曲线时,起算点和转向方向都要改变,同时原路线方向上的左侧变成了右侧,原路线方向上的右侧变成了左侧,等等,这点要注意。
卡西欧Casiofx-4800P道路中边桩坐标计算程序

卡西欧Casiofx-4800P道路中边桩坐标计算程序程序清单如下:Casio fx-4800P道路中边桩坐标计算程序程序目的:依平曲线要素计算直线、圆曲线、缓和曲线的任意中桩、左、右桩坐标。
程序说明:K0:起始桩号X0:起始X坐标Y0:起始Y坐标ALF:起始方位角R:半径LS:缓和曲线长N:曲线左转N=1,右转N=2K:待求桩号LL、LR:左、右桩距离Q:左、右桩与中线斜交角求得XZ、YZ、XL、YL、XR、YR分别为中桩、左、右桩坐标。
一、直线段文件名:ZX (COMP)程式:L”K0”:O”X0”:P”Y0”:W”ALF”:Lbl 0:{K}:X”XZ”=O+(K-L)cosW◢Y”YZ”=P+(K-L)sinW◢{B}:S”XL”=X-B”LL”cos(W+Q) ◢T”YL”=Y-Bsin(W+Q) ◢{C}:U”XR”=X+C”LR”cos(W+Q) ◢V”YR”=Y+Csin(W+Q) ◢Goto 0注:在程序执行过程中,赋给的要素变数的值被固定不变,可对变数(K、LL、LR)赋予不同值,迅速求得所需坐标。
二、圆曲线段文件名:YQX (COMP)程式:L”K0”:O”X0”:P”Y0”:W”ALF”: Lbl 1:{K}:J=(-1)^N (K-L)÷R×180÷π:D=2Rsin((-1)^N J÷2):X”XZ”=O+Dcos(W+J÷2) ◢Y”YZ”=P+Dsin(W+J÷2) ◢{B}:S”XL”=X-B”LL”cos(W+J+Q) ◢T”YL”=Y-Bsin(W+J+Q) ◢{C}:U”XR”=X+C”LR”cos(W+J+Q) ◢V”YR”=Y+Csin(W+J+Q) ◢Goto 1注:若没有直接HY点方位角,则ALFHY=ALFZH±Ls/2/R×180/π,(左转-,右转+)。
三、缓和曲线文件名:HHQX (COMP)程式:L”K0”:O”X0”:P”Y0”:W”ALF”: M”LS”:Lbl 3:{K}:I=(-1)^N×(K-L)^2÷M÷R÷6×180÷π:D=(K-L)-(K-L)^5÷90÷(RM)^2:X”XZ”=O+Dcos(W+I)◢Y”YZ”=P+Dsin(W+I) ◢{B}:S”XL”=X-B”LL”cos(W+3I+Q) ◢T”YL”=Y-Bsin(W+3I+Q) ◢{C}:U”XR”=X+C”LR”cos(W+3I+Q) ◢V”YR”=Y+Csin(W+3I+Q) ◢Goto 3注:1、坐标计算方法是根据偏角法原理;2、缓和曲线(ZH~HY或YH~HZ)以ZH(或HZ)为起始点;3、平曲线左转(ZH~HY段N=1,YH~HZ段N=2),曲线右转(ZH~HY段N=2,YH~HZ段N=1)。
CASIO fx5800P单交点单圆曲线中边、桩坐标计算程序

单交点单圆曲线中边桩坐标计算程序(PM4-3)(2) 主程序——PM4-3,占用内存1070字节。
"SINGLE CIRCLE CURVE"显示程序标题1"METHOD OF COORDINATE PM4-3"显示坐标法标题2Deg:ClrStat:FreqOn:Fix 3基本设置14DimZ定义额外变量"JD MILEAGE PEG(m)="?Z输入以m为单位的交点桩号"JD X(m)="?U输入交点x坐标"JD Y(m)="?V输入交点y坐标"ZD X(m)="?M输入转点x坐标"ZD Y(m)="?N输入转点y坐标Pol(U-M,V-N):Cls计算ZD JD的边长与方位角If J<0:Then J+360A:Else J A:IfEnd判断ZD JD的方位角A"TURNING ANGLE -L,+R(Deg)="?Q输入交点路线转角,左偏为负,右偏为正If Q<0:Then -1Z[10]:Else 1Z[10]:IfEnd确定转角数值Q Z[4]:Abs(Q)D保存转角及符号"R(m)="?R输入圆曲线半径Rtan(0.5D)T计算切线长RDπ÷180L计算曲线长R(cos(0.5D)-1-1)E计算外距2T-L J计算切曲差"T(m)=":T显示切线长"L(m)=":L显示曲线长"E(m)=":E显示外距"J(m)=":J显示切曲差Z-T Z[1]:Z[1]+0.5L Z[2]:Z[2]+0.5L Z[3]计算ZY,QZ,YZ点桩号Z[1]List X[1]存储ZY点的桩号到统计串列U-Tcos(A)List Y[1]:V-Tsin(A)List Freq[1]计算并存储ZY点的测量坐标到统计串列"ZY PEG(m)=":List X[1]显示ZY点桩号及坐标"ZY-X(m)=":List Y[1]"ZY-Y(m)=":List Freq[1]"WL(m),0 NO="?B输入路面左半幅宽度If B>0:Then List Y[1]+Bcos(A-90)Z[11]计算并显示ZY点的左边桩坐标List Freq[1]+Bsin(A-90)Z[12]"XL(m)=":Z[11]"YL(m)=":Z[12]IfEnd"WR(m),0 NO="?C输入路面右半幅宽度If C>0:Then List Y[1]+Ccos(A+90)Z[13]计算并显示ZY点的右边桩坐标List Freq[1]+Csin(A+90)Z[14]"XR(m)=":Z[13]"YR(m)=":Z[14]IfEndZ[2]List X[2]:2K存储ZY点的桩号到统计串列Prog "SUB4-31"调子程序计算并显示QZ点坐标Z[3]List X[3]:3K存储YZ点桩号Prog "SUB4-31"调子程序计算并显示YZ点坐标If R<30:Then 5I:Else If R<60:Then 10I:Else 20I:IfEnd:IfEnd确定整桩间距"INT DIST(m)="?O输入整桩间距If O>0:Then O I:IfEnd输入的整桩间距大于零时,使用输入值"ONLY CALC +PEG(1)"?G输入1为只计算加桩点的坐标If G=1:Then Goto 1:IfEndK+1K计数变量计数Int(Z[1]÷I)I+I List X[K]计算并存储从ZY点开始的第一个整桩号Prog "SUB4-31"调子程序计算并显示坐标Do计算ZY点至YZ点K+1K计数变量计数List X[K-1]+I List X[K]计算并存储整桩号Prog "SUB4-31"调子程序计算并显示坐标LpWhile List X[K]+I<Z[3]没计算到YZ点时继续循环Lbl 1Do"+PEG(m)="?F输入加桩号If F List X[1]:Then Break:IfEnd加桩号小于ZH点桩号时结束程序运行If F List X[3]:Then Break:IfEnd加桩号大于HZ点桩号时结束程序运行K+1K计数变量计数F List X[K]存储加桩号到统计串列Prog "SUB4-31"调子程序计算并显示偏角弦长LpWhile F>0没有计算到YZ点时继续循环"PM4-3END"(3) 子程序——SUB4-31,占用内存498字节。
缓和曲线中边桩计算
340
2922069.813 527737.292 2922073.135 527725.760
0
2922064.985 527735.889 2922068.360 527724.373
5
2922060.162 527734.462 2922063.594 527722.964
10
2922055.344 527733.010 2922058.837 527721.530
c2 A2 β0 T2 直线方位角(度分秒) 直线方位角(度) 直线反向方位角(弧度)
HZ点坐标(N,E)
YH点坐标(X0,Y0)
67600 260
0.00106383 251.460 236° 13′ 18.0″
236.2216667 0.981253194 2921746.204 527474.950 143.4932615 -7.335840035
300
2922108.536 527747.869 2922111.583 527736.263
305
2922103.691 527746.593 2922106.758 527734.991
310
2922098.846 527745.307 2922101.937 527733.712
315
2922094.003 527744.010 2922097.121 527732.422
K10+793.594 2922023.848
K10+798.594 2922019.147
K10+803.594 2922014.460
K10+808.594 2922009.790
K10+813.594 2922005.136
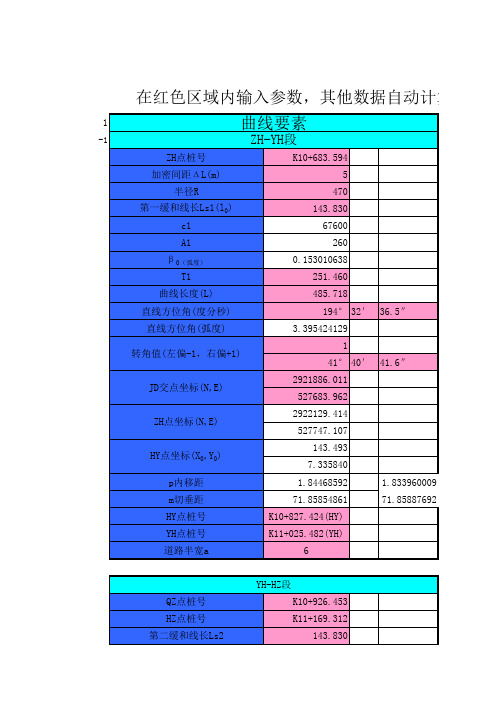
缓和曲线段任意中边桩计算说明
缓和曲线段(ZH-HY)任意中边桩计算说明
1.缓和线段:程序名:hhqx12, 起始1,计算2的解释:输入1为已知条件输入,有了已知条件后要计算的各桩号时就可以输入2,这样就不会重复显示已知的部分条件提问,可直接进入该段的各桩号计算、边距与线路前进方向的边距夹角。
正交时输入90,中心点输0,边距在左输入负数,边距在右侧输入整数,这里加了一个左偏与右偏,左偏时输入-1,右偏时输入+1,半径可直接输入,不用输负号。
2.。
最后显示的X,Y值是计算点的坐标,平距是“站点至计算点”之间平距离。
方位角是“站点至计算点”方向的方位角,
3.此程序可用于小半径计算。
4.本不想再拆解缓和曲线部分,但根据群中有几位要求才拆分此段落。
由于本人能力有限,肯定会有不足之处,如在使用此程序中发现问题或需要改进之处,恳请各位老师与同事多加以指点。
谢谢。
逍逸与2013.4.11上午。
圆曲线缓和曲线坐标计算CASIOP程序

圆曲线缓和曲线坐标计算CASIO5800P程序李强善2010-03-14 14:21:45 本站〝XY〞Lb1 1↙Cls:Fix4:10→DimZ↙〝K=〞?K↙If K≤本段终点里程 And K≥上段终点里程:Then 本段终点里程→Z[25]:本段曲线终点里程→Z[1]:上段终点里I(左负右正):曲线半径→R:第一缓和曲线→Z[6]:第二缓和曲线→Z[7]:第一切线→Z[12]:第二切线→Z[13]:交点方位角→E:交点向大里程方位角→F: Goto 2:IfEnd↙Lb1 2↙Z[6]÷2-Z[6]^(3)÷(240×R2)+Z[6]^(5)÷(34560×R^(4)) →Z[8] ↙Z[7]÷2-Z[7]^(3)÷(240×R2)+Z[7]^(5)÷(34560×R^(4)) →Z[9] ↙切垂距mZ[6]2÷(24×R)-Z[6]^(4)÷(2688×R^(3)) →Z[10] ↙内移距PZ[7]2÷(24×R)-Z[7]^(4)÷(2688×R^(3)) →Z[11] ↙π×A×R÷180+0.5×(Z[6]+Z[7]) →S↙90×Z[6]÷(R×π) →Z[14] ↙缓和90×Z[7]÷(R×π) →Z[15] ↙B+Z[12]×cos(E+180) →Z[16] ↙C+Z[12]×sin(E+180) →Z[17] ↙B+Z[13]×cos(F) →Z[22] ↙C+Z[13]×sin(F) →Z[23] ↙Z[1]-S→Z[3] ↙程Z[1]-S+Z[6] →Z[4] ↙Z[1]-Z[7] →Z[5] ↙Goto 3↙Lb1 3↙If K≤Z[3] And K>Z[2]:Then Goto 4:IfEnd↙If K≤Z[4] And K>Z[3]:Then Goto 5:IfEnd↙If K≤Z[5] And K>Z[4]:Then Goto 6:IfEnd↙If K≤Z[1] And K>Z[5]:Then Goto 7:IfEnd↙If K≤Z[25] And K>Z[1]:Then Goto 8:IfEnd↙Lb1 4↙直线K-Z[3] →X:0→Y:E→T: Prog〝XY-1〞:Goto 1↙Lb1 5↙缓和曲线K-Z[3] →H↙H-H^(5)÷(40×R2×Z[6]2)+H^(9)÷(3456×R^(4)×Z[6]^(4)) →X↙H^(3)÷(6×R×Z[6])-H^(7)÷(336×R^(3)×Z[6]^(3))→Y↙90×H2÷(R×π×z[6])→T↙If I>0: Then T+E→T: Else: E-T→T: T<0 =>360+T→T: IfEnd↙Prog 〝XY-1〞:Goto 1↙Lb1 7↙缓和曲线Z[1]-K→H↙H-H^(5)÷(40×R2×Z)[7]2)+H^(9)÷(3456×R^(7)×Z[7]^(4))→U↙H^(3)÷(6×R×Z[7])-H^(7)÷(336×R^(3)×Z[7]^(3))→V↙90×H2÷(R×π×Z[7])→T↙Z[13]×cos(A)+Z[12]-U×cos(A)-V×sin(A)→X↙Z[13]×sin(A) -U×sin(A)+V×cos(A)→Y↙If I>0:Then F-T→T: T<0 =>360+T→T: Else F+T→T: IfEnd↙Prog 〝XY-1〞:Goto 1↙Lb1 8↙二直线K-Z[1]→X: 0→Y: Prog 〝XY-2〞: Goto 1↙程序说明:Z[25]为断链前里程,下一段的Z[2]为断后里程(长链相反),如果没有断链,Z[25]这一步可省略。
道路测量中缓和曲线中桩坐标计算方法
道路测量中缓和曲线中桩坐标计算方法的研究摘要:本文讲解了在利用全站仪进行缓和曲线中桩放样时,缓和曲线的基本形和卵形两种情况下中桩坐标计算的方法。
关键词:缓和曲线、基本形、卵形、中桩坐标计算。
随着全站仪在道路工程施工测量中的普及,传统的中线放样方法逐渐被淘汰。
目前道路工程中线放样时,只要能计算出中线上任意一点的坐标,用全站仪或者GPSRTK的坐标放样功能就可很方便、快捷地完成实地放样。
道路线形是由直线、圆曲线、缓和曲线三种线形组合而成的,而直线与圆曲线组合的线形(见图一)中桩坐标计算比较简单,在此不作阐述。
下面就缓和曲线与其它两种线形组合的线形中桩坐标计算予以分析。
缓和曲线与其它两种线形组合构成的线形主要有缓和曲线的完整形(即基本形)(见图二)和非完整形(即卵形)(见图三)二种。
一、基本形曲线中桩坐标计算:1、对于第一缓和曲线及圆曲线段(ZH~YH)(如图四),建立以ZH为坐标原点,切线方向为X′轴,半径方向为Y′轴的曲线坐标系(X′O′Y′)。
先计算曲线各点在曲线坐标系下的坐标。
⑴对于第一缓和曲线段(ZH~HY)内任一点i(此时L=Ki-KZH)若圆曲线半径R≥100m时,则Xi′=L-L5/(40R2Ls12) 公式①Yi′=L3/(6RLs1) 公式②若圆曲线半径R<100m时,则X′=L-L5÷[40(RLS)2] L9÷[3456(RLS)4]–L13÷[599040(RLS)6]L17÷[175472640(RLS)8]- L21÷[7.80337152×1010(RLS)10] (公式③)Y′=L3÷[6(RLS)] - L7÷[336(RLS)3] L11÷[42240(RLS)5] - L15÷[9676800(RLS)7] L19÷[3530096640(RLS)9] - L23÷[1.8802409472×1012(RLS)11] (公式④)⑵对于圆曲线段(HY~YH)上任一点iXi′=q Rsin cent;iYi′=R(1-cos cent;i) pL=Ki-KZH cent;i=(L- Ls1)*180/(Rπ) β0内移值P=Ls12/(24R)切线增值q= Ls1/2- Ls13/(240R2)综合⑴、⑵,根据不同坐标系的相互转换,可得ZH~YH上任一点i的中桩测量坐标为:Xi=XZH cosA×Xi′-sinA×f×Yi′(公式⑤)Yi= YZH sinA×Xi′ cosA×f×Yi′(公式⑥)角。
怎样用系列计算器测量线路中边桩

CASIO工程系列计算器在测量线路中边桩的应用一、直线段的程序编制1、直线段的计算模型X=x+DcosJ-MsinJY=y+DsinJ-McosJX、Y-所求点的坐标x、y-已知道点的坐标M-边桩到中桩的距离J-方位角2、程序的编制A"X":B"Y":J:M:KLbIO:﹛Z,M﹜:D=Abs(Z-K)X=A+DcosJ-MsinJ⍓Y=B+DsinJ-McosJ⍓Goto 0本程序符号说明如下:A、B-已知点的坐标K-已知点的里程J-已知点到所求点的方位角Z-所求点的里程M-边桩到中桩的距离D-所求点到已知点的距离X、Y-所求点的坐标二、圆曲线的段程序的编制曲线一般先是求点在局部坐标系下的坐标,然后在用坐标转化公式转化为线路控制坐标。
坐标转化公式如下:X=xcosJ-uysinJY=xsinJ+uycosJx、y- 局部坐标系下的坐标X、Y: -转化后的坐标J -局部坐标系的x轴坐标和线路控制坐标系y轴的夹角,即本文中的方位角。
在运用此公式时,当曲线左转角u取负值。
当曲线为右转角时u取正值。
1、圆曲线段的计算模型图(1)圆曲线在局部坐标系下的计算公式如下:x=Rsinφjy=R(1-cosφj)φj=180l i÷(πR)(所求点所对应的圆心角) 中桩和边桩计算公式X=XZY + xcosα-UySinα-Msin(α+Uφi)Y=YZY + xsinα+Uycosα+Mcos(α+Uφi)2、程序的编制U“Z-,Y+”:A“XZY”: B“YZY": K“KZY”J“FWJ”:RLb10←{Z,M}←C=Z﹣K:Q=180C÷(πR) ←W=RsinQ:V=R(1-cosQ)X=A+WcosJ-UVSinJ-Msin(J+UQ) ◢Y=B+WsinJ+UVcosJ+Mcos(J+UQ) ◢Goto 0本程序符号说明如下:U:判断符号左转时为负号,右转时为正A、B-直圆点的坐标K-直圆的里程J-方位角Z-所求点的里程M-边桩到中桩的距离C-所求点到直圆的距离Q-所求点所对应的圆心角X、Y-所求点的坐标三、缓和曲线段的程序编制缓和曲线有三部分组成,中间为圆曲线,两边分别插入回旋曲线。
坐标边桩中桩计算程序casio计算器

计算示例已知:JD1 X:38327 Y:949876.806JD2 X:38957.002 Y:95298.524曲线半径R:70m曲线偏角PJ:偏左96°44'49.91"缓和曲线长度LS:40mZH桩号:K1+617.416 HY桩号:K1+657.416YH桩号:K1+735.613 HZ桩号:K1+775.613求算:JD1交点曲线HZ点K1+210.040至JD2交点曲线HZ点K1+775.613段内公路中线任意桩号的中桩坐标和任意宽度边桩坐标。
启动主程序,程序运行过程如下:7.源程序清单主程序文件名CENTERLINE COMP) Defm4Prog ”SUB1” H ”L -1 OR R 1” O ”PJ ” S ”LS ” R ”R ”L=RO π÷180+S P=S²÷24÷R -S 4÷2384÷R 3 Q=S ÷2-S 3÷240÷R² T=(R +P )tan(O ÷2)+Q V ”(X0,Y0)=>]ZH ” G ”ZH ” Lb1 {E}E ”K ”:E ≤G=>Prog ”SUB5”N=E-G:N>L+0.001”ERROR ” N ≤S=>Prog ”SUB2”: ≠=> N ≤L-S=>Prog ”SUB3”:≠=>Prog SUB4E-G ≤L-S=>U=tan -1(Z ÷W):≠=>U= tan -1 (Z ÷W)+I= (W²+Z²):Z÷J=F +HUE-G ≤L-S=>C”ZHX ”=A+VcosF◢ ZHY ”=B+VsinF ◢ X=Int((C+IcosJ)×1000+0.5)÷1000◢ Y=Int((D+IsinJ)×1000+0.5)÷1000◢ Lb12:{M}M ”SIDELINE ”M ≠0 =>Prog ”SIDELINE Goto1子程序文件名 SUB1 (COMP) {AB} {CD} A ”X0” B ”Y0 C ”X1” D ”Y1” X=C-A Y=D-BK= (X ²+Y ²)◢X>0=>F=tan -1(Y ÷X): ≠ =>X<0 =>F=tan -1(Y ÷X)+180: ≠=>Y<0 =>F=270:≠=>F=90F ”AZIMUTH ” ◢子程序文件名 SUB2 (COMP)W=N-N 5÷40÷R ²÷S ²Z=N 3÷(6RS)-N 7÷(336R 3S 3) 子程序文件名 SUB3 (COMP) Z[1]=180(N-S ÷2)÷R ÷л W=Q+RsinZ[1]Z=P+R(1-cosZ[1])子程序文件名(COMP)N=L-NProg ”SUB2” W=T -WC ”JDX ”=A+(V+T)cosF ◢D ”JDY ”=B+(V+T)sinF ◢子程序文件名(COMP)I=V -G+EX=Int((A+IcosF)×1000+0.5)÷1000◢ Y=Int((B+IsinF)×1000+0.5)÷1000◢子程序文件名(COMP) W=0Z=0{W} {Z}W ”L(-1) OR R(1) Z ”—I —”E ≤G=>E ≤G+S => Z[2]=F+90HN ²÷R ÷S ÷л:≠=> E ≤G+L -S => Z[2]=F+90H(2N -S)÷R ÷л: ≠=> Z[2]=F+H(O -90N ²÷R ÷S ÷л) Lb1 0Z[3]=Int((X+Zcos(Z[2]+90W))×1000+0.5)÷1000◢ Z[4]=Int((Y+Zsin(Z[2]+90W))×1000+0.5)÷1000◢。
带缓和曲线的圆曲线中桩计算公式

研究了好几天,查了很多资料,终于把这个难搞的东西搞定了,赶快把它记录下来,以免下次又忘了。
(公式直接输入excel就可以计算坐标)关于公式中的一些符号的意思:R :圆曲线半径L1 :缓和曲线上任一点到ZH或HZ点的距离L2 :圆曲线上任一点到YH点的距离X、Y :表示坐标Ls :缓和曲线长度а :方位角首先:是ZH点到HY点的坐标计算:X=X zh+(L1-L s5/(40R2L s2))cosа+(L13/(6RL))cos(а+90) 路线向左转,前面括号里带下划线的+270Y=Y zh+(L1- L s5/(40R2L s2))sinа+(L13/(6RL))sin(а+90) 路线向左转,前面括号里带下划线的+270HY点~YH点:X=X zh+(Rsin((2L2+L s)/(2R)+Ls/2-L s3/(240R2))cosа+(R(1-cos((2L2+L s s)/(2R))+ L s2/(24R))cos(а+90) 路线向左转,前面括号里带下划线的+270Y=Y zh+(Rsin((2L2+L s)/(2R)+Ls/2-L s3/(240R2))sinа+(R(1-cos((2L2+Ls)/(2R))+ L s2/(24R))sin(а+90) 路线向左转,前面括号里带下划线的+270YH点~HZ点:(是以缓直点坐标起算的)X=X hz+(L1-L15/(40R2Ls2))cos(а-180)+(L13/(6RL s))cos(а-270)路线向左转时,括号里带下划线的-90Y=Y hz+(L1-L15/(40R2Ls2))sin(а-180)+(L13/(6RL s))sin(а-270)路线向左转时,括号里带下划线的-90另:在YH~HZ点计算中,方位角а是下一条直线的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四 第一缓和曲线道路中边桩编程和计算
一、实验目的
1、掌握第一缓和曲线型道路的数学模型及其计算过程
2、学习和掌握用CASIO Fx-4850计算器编写计算缓和曲线型道路中边桩的计算。
二、实验原理
(一)、第一缓和曲线型道路数学模型 1、数学模型
已知点1-i JD 和i JD 的测量坐标,转角i I ,设计半径R ,缓和曲线长S l ,以及点i JD 和P 的里程,要求的P 的测量坐标。
由两已知点可以算的直线的方位角i α,
)(
tan 1
1
1-----=i i i i i X X Y Y α (4—1)
1
+i
1.4图示意图
右偏曲线第一缓和曲线
由切线长1T 和i JD 的坐标即可算出ZH 的坐标,
)
180sin()180cos(11++=++=i i ZY i i ZY T Y Y T X X αα (4—2)
建立独立坐标系''ZHy x 。
我们已经知道,缓和曲线上任意相对原点ZH 曲线长为P l 一点P 在独立坐标系''ZHy x 中的坐标,
-+-=
-+
-
=5
511
337
3
'449
225
'422403366345640S
P
S P S P P S
P
S
P
P P
l R l l R l Rl l Y l R l l R l l X (4—3)
在由已求得的ZH 和i α,通过坐标平移旋转,即可求得P 的测量坐标,
ZH
i P
i P P ZH
i P i P P Y Y X Y X Y X X ++=+-=ααααcos sin sin cos ''
''
(4—4)
P I 我们也可求得, π
180
2⨯=
S P P Rl l I 由P I 和i α求得曲线在点P 处的切线的方位角,再由切线的方位角,求得边桩的方位角,如已知边桩距,就可用式(4—2)求得边桩的坐标。
2、计算步骤
(1)输入已知数据:i i i i i i i R I L Y X Y X ,,,,,,11--。
(2)坐标反算i α:J Y Y X X Pol i i i i i =----α),,(11 (3)坐标正算ZH ZH Y X ,:
①计算整个缓和曲线长902÷=÷=πR I R A L i S (在独立坐标系y x ZH ''-中) ②利用整个缓和曲线长计算HY 点坐标
563424
523422403366345640R
L R L R L Y R L R L L X S S S HY S S S HY ÷÷+÷÷-÷÷='÷÷+÷÷-='
③利用HY 点坐标计算缓和曲线切线长
i HY
i HY HY
I Y T I Y X T sin tan 21÷'=÷'-'=
④利用切线长计算ZH 点里程和坐标
i i ZH T L L -= (为下一步计算P 在独立坐标系中的坐标做准备)
)
180sin()180cos(11++=++=i i ZH i i ZH T Y Y T X X αα
(4)输入任意曲线点P 里程P L
①计算P 点相对于ZH 点的弧度长度:ZH P P L L l -=
②计算P 点距ZH 点弧线长度所对的圆心角 :π÷÷÷=S p P L R l I 2
90
③计算P 点在独立坐标系中的坐标:
55
1133
73
4
49225422403366345640S
P
S P
S P P S
p S P p P L R l L R l L R l Y L R l L R l l X ÷÷÷+÷÷÷-÷÷÷='÷÷÷+÷÷÷-='
(5)坐标变换计算
i
P i P ZH P i P i P
ZH P Y X Y Y Y X X X ααααcos sin sin cos '+'+='-'+=
(6)中边桩坐标计算
方位角 右边桩 90++=P I αβ
左边桩 90-+=P I αβ
左边桩坐标的计算:⎩⎨⎧+=+=ββ
sin D cos L 11P L L P L Y Y D X X
右边桩坐标的计算:⎩⎨⎧+=+=ββ
sin D cos R 11P R R P R Y Y D X X
3、编写程序的流程图
4、变量对照表
表4.1 参数与变量名之间的对应关系
(二)、第一缓和曲线型道路中边桩计算程序编写,用表格形式表4.2 第一缓和曲线子程序及主控程序(中桩部分)
三、范例 1、范例题目
如图 4.2所示,已知0JD 的坐标为)66865.968,68662.586(,1JD 的坐标为
)66876.038,68480.843(,转角为I 为:'''01354o +,半径300m =R
,缓和曲线长48m =S L ,1JD 的桩号182.022m 0+=K L ,边桩距为D 为:10m 。
求曲线上里程
为180m =P L 的任意点P 的测量坐标()P P Y X ,及其边桩点的测量坐标。
2
2.4图示意图
右偏曲线第一缓和曲线
2、范例手动计算过程
(1)坐标反算i α:9.4294176),,(11'''=---- i i i i i Y Y X X Pol α (2)坐标正算ZH ZH Y X ,:
①计算整个缓和曲线长902÷=÷=πR I R A L i S =48m ②利用整个缓和曲线长计算HY 点坐标
279.1422403366969
.473456405
63
42
4
523=÷÷+÷÷-÷÷='=÷÷+÷÷-='R L R L R L Y R L R L L X S
S
S HY
S S S HY
③利用HY 点坐标计算缓和曲线切线长
005.16sin 015.32tan 21=÷'==÷'-'=i HY
i HY HY
I Y T I Y X T
④利用切线长计算ZH 点里程和坐标
i i ZH T L L -==150.007
267
.66874)180sin(809.68512)180cos(11++==++=i i ZH i i ZH T Y Y T X X αα
(3)输入任意曲线点P 里程P L
①计算P 点相对于ZH 点的弧度长度:993.29=-=ZH P P L L l ②计算
P
点距
ZH
点弧线长度所对的圆心角 :
77.22741902
'''=÷÷÷= πS p P L R l I
③计算P 点在独立坐标系中的坐标:
312.0422403366990
.2934564055
1133
73
449225=÷÷÷+÷÷÷-÷÷÷='=÷÷÷+÷÷÷-='S
P
S P
S P P S p S P p P L R l L R l L R l Y L R l L R l l X
(4)坐标变换计算
614.66875cos sin 848.68482sin cos ='+'+=='-'+=i P i P
ZH P i P i P
ZH P Y X Y Y Y X X X αααα
(5)中边桩坐标计算
方位角 右边桩76.57328690'''=++= P I αβ
左边桩76.5738890'''=-+= P I αβ
左边桩坐标的计算:⎩⎨⎧=+==+=611.66885sin D 089
.68483cos L 11ββP L L P L Y Y D X X
右边桩坐标的计算:⎩⎨⎧=+==+=617.66865sin D 607
.68482cos R 11ββP R R P R Y Y D X X
3、范例程序计算结果:
LP=180
XZ=68482.848 YZ=66875.614 D=10 XB=68483.089 YB=66885.611。