A Convex Guidance Algorithm for Formation Reconfiguration
数字图像处理-冈萨雷斯-课件(英文)Chapter11-表示与描述可编辑全文

Benefits: - Easier to understand - Require fewer memory, faster to be processed - More “ready to be used”
3 from
Lupper
Turn Right OK!
Turn Right OK!
Algorithm (cont.)
For the lower side of a convex hull
7. 8.
Put For
the i=
np-o2indtoswpnn
The First Difference of a Chain Codes
Problem of a chain code: a chain code sequence depends on a starting point.
Solution: treat a chain code as a circular sequence and redefine the starting point so that the resulting sequence of numbers forms an integer of minimum magnitude.
Remove the first and the last points from AReptpuernndLLlower to Lupper resulting in the list
LLlower
3 points from Llower
Turn Left NOK!
a转换成膜a算法
a转换成膜a算法As technology continues to advance at a rapid pace, it is crucial for algorithms to evolve and adapt accordingly. One algorithm that has garnered significant attention in recent years is the "a to b" algorithm. This algorithm, which aims to convert 'a' into 'b', is essential for various applications in data processing and analysis.随着技术的快速发展,算法需要不断演变和适应。
最近几年受到广泛关注的一种算法是“a转换成b”算法。
这种算法旨在将'a'转换为'b',在数据处理和分析等各种应用中起着关键作用。
One of the primary requirements for the "a to b" algorithm is efficiency. The algorithm should be able to convert 'a' into 'b' quickly and accurately, without compromising the quality of the output. This efficiency is essential for applications where real-time processing and response are crucial.“a转换成b”算法的主要要求之一是效率。
ABSTRACT Progressive Simplicial Complexes

Progressive Simplicial Complexes Jovan Popovi´c Hugues HoppeCarnegie Mellon University Microsoft ResearchABSTRACTIn this paper,we introduce the progressive simplicial complex(PSC) representation,a new format for storing and transmitting triangu-lated geometric models.Like the earlier progressive mesh(PM) representation,it captures a given model as a coarse base model together with a sequence of refinement transformations that pro-gressively recover detail.The PSC representation makes use of a more general refinement transformation,allowing the given model to be an arbitrary triangulation(e.g.any dimension,non-orientable, non-manifold,non-regular),and the base model to always consist of a single vertex.Indeed,the sequence of refinement transforma-tions encodes both the geometry and the topology of the model in a unified multiresolution framework.The PSC representation retains the advantages of PM’s.It defines a continuous sequence of approx-imating models for runtime level-of-detail control,allows smooth transitions between any pair of models in the sequence,supports progressive transmission,and offers a space-efficient representa-tion.Moreover,by allowing changes to topology,the PSC sequence of approximations achieves betterfidelity than the corresponding PM sequence.We develop an optimization algorithm for constructing PSC representations for graphics surface models,and demonstrate the framework on models that are both geometrically and topologically complex.CR Categories:I.3.5[Computer Graphics]:Computational Geometry and Object Modeling-surfaces and object representations.Additional Keywords:model simplification,level-of-detail representa-tions,multiresolution,progressive transmission,geometry compression.1INTRODUCTIONModeling and3D scanning systems commonly give rise to triangle meshes of high complexity.Such meshes are notoriously difficult to render,store,and transmit.One approach to speed up rendering is to replace a complex mesh by a set of level-of-detail(LOD) approximations;a detailed mesh is used when the object is close to the viewer,and coarser approximations are substituted as the object recedes[6,8].These LOD approximations can be precomputed Work performed while at Microsoft Research.Email:jovan@,hhoppe@Web:/jovan/Web:/hoppe/automatically using mesh simplification methods(e.g.[2,10,14,20,21,22,24,27]).For efficient storage and transmission,meshcompression schemes[7,26]have also been developed.The recently introduced progressive mesh(PM)representa-tion[13]provides a unified solution to these problems.In PM form,an arbitrary mesh M is stored as a coarse base mesh M0together witha sequence of n detail records that indicate how to incrementally re-fine M0into M n=M(see Figure7).Each detail record encodes theinformation associated with a vertex split,an elementary transfor-mation that adds one vertex to the mesh.In addition to defininga continuous sequence of approximations M0M n,the PM rep-resentation supports smooth visual transitions(geomorphs),allowsprogressive transmission,and makes an effective mesh compressionscheme.The PM representation has two restrictions,however.First,it canonly represent meshes:triangulations that correspond to orientable12-dimensional manifolds.Triangulated2models that cannot be rep-resented include1-d manifolds(open and closed curves),higherdimensional polyhedra(e.g.triangulated volumes),non-orientablesurfaces(e.g.M¨o bius strips),non-manifolds(e.g.two cubes joinedalong an edge),and non-regular models(i.e.models of mixed di-mensionality).Second,the expressiveness of the PM vertex splittransformations constrains all meshes M0M n to have the same topological type.Therefore,when M is topologically complex,the simplified base mesh M0may still have numerous triangles(Fig-ure7).In contrast,a number of existing simplification methods allowtopological changes as the model is simplified(Section6).Ourwork is inspired by vertex unification schemes[21,22],whichmerge vertices of the model based on geometric proximity,therebyallowing genus modification and component merging.In this paper,we introduce the progressive simplicial complex(PSC)representation,a generalization of the PM representation thatpermits topological changes.The key element of our approach isthe introduction of a more general refinement transformation,thegeneralized vertex split,that encodes changes to both the geometryand topology of the model.The PSC representation expresses anarbitrary triangulated model M(e.g.any dimension,non-orientable,non-manifold,non-regular)as the result of successive refinementsapplied to a base model M1that always consists of a single vertex (Figure8).Thus both geometric and topological complexity are recovered progressively.Moreover,the PSC representation retains the advantages of PM’s,including continuous LOD,geomorphs, progressive transmission,and model compression.In addition,we develop an optimization algorithm for construct-ing a PSC representation from a given model,as described in Sec-tion4.1The particular parametrization of vertex splits in[13]assumes that mesh triangles are consistently oriented.2Throughout this paper,we use the words“triangulated”and“triangula-tion”in the general dimension-independent sense.Figure 1:Illustration of a simplicial complex K and some of its subsets.2BACKGROUND2.1Concepts from algebraic topologyTo precisely define both triangulated models and their PSC repre-sentations,we find it useful to introduce some elegant abstractions from algebraic topology (e.g.[15,25]).The geometry of a triangulated model is denoted as a tuple (K V )where the abstract simplicial complex K is a combinatorial structure specifying the adjacency of vertices,edges,triangles,etc.,and V is a set of vertex positions specifying the shape of the model in 3.More precisely,an abstract simplicial complex K consists of a set of vertices 1m together with a set of non-empty subsets of the vertices,called the simplices of K ,such that any set consisting of exactly one vertex is a simplex in K ,and every non-empty subset of a simplex in K is also a simplex in K .A simplex containing exactly d +1vertices has dimension d and is called a d -simplex.As illustrated pictorially in Figure 1,the faces of a simplex s ,denoted s ,is the set of non-empty subsets of s .The star of s ,denoted star(s ),is the set of simplices of which s is a face.The children of a d -simplex s are the (d 1)-simplices of s ,and its parents are the (d +1)-simplices of star(s ).A simplex with exactly one parent is said to be a boundary simplex ,and one with no parents a principal simplex .The dimension of K is the maximum dimension of its simplices;K is said to be regular if all its principal simplices have the same dimension.To form a triangulation from K ,identify its vertices 1m with the standard basis vectors 1m ofm.For each simplex s ,let the open simplex smdenote the interior of the convex hull of its vertices:s =m:jmj =1j=1jjsThe topological realization K is defined as K =K =s K s .The geometric realization of K is the image V (K )where V :m 3is the linear map that sends the j -th standard basis vector jm to j 3.Only a restricted set of vertex positions V =1m lead to an embedding of V (K )3,that is,prevent self-intersections.The geometric realization V (K )is often called a simplicial complex or polyhedron ;it is formed by an arbitrary union of points,segments,triangles,tetrahedra,etc.Note that there generally exist many triangulations (K V )for a given polyhedron.(Some of the vertices V may lie in the polyhedron’s interior.)Two sets are said to be homeomorphic (denoted =)if there ex-ists a continuous one-to-one mapping between them.Equivalently,they are said to have the same topological type .The topological realization K is a d-dimensional manifold without boundary if for each vertex j ,star(j )=d .It is a d-dimensional manifold if each star(v )is homeomorphic to either d or d +,where d +=d:10.Two simplices s 1and s 2are d-adjacent if they have a common d -dimensional face.Two d -adjacent (d +1)-simplices s 1and s 2are manifold-adjacent if star(s 1s 2)=d +1.Figure 2:Illustration of the edge collapse transformation and its inverse,the vertex split.Transitive closure of 0-adjacency partitions K into connected com-ponents .Similarly,transitive closure of manifold-adjacency parti-tions K into manifold components .2.2Review of progressive meshesIn the PM representation [13],a mesh with appearance attributes is represented as a tuple M =(K V D S ),where the abstract simpli-cial complex K is restricted to define an orientable 2-dimensional manifold,the vertex positions V =1m determine its ge-ometric realization V (K )in3,D is the set of discrete material attributes d f associated with 2-simplices f K ,and S is the set of scalar attributes s (v f )(e.g.normals,texture coordinates)associated with corners (vertex-face tuples)of K .An initial mesh M =M n is simplified into a coarser base mesh M 0by applying a sequence of n successive edge collapse transforma-tions:(M =M n )ecol n 1ecol 1M 1ecol 0M 0As shown in Figure 2,each ecol unifies the two vertices of an edgea b ,thereby removing one or two triangles.The position of the resulting unified vertex can be arbitrary.Because the edge collapse transformation has an inverse,called the vertex split transformation (Figure 2),the process can be reversed,so that an arbitrary mesh M may be represented as a simple mesh M 0together with a sequence of n vsplit records:M 0vsplit 0M 1vsplit 1vsplit n 1(M n =M )The tuple (M 0vsplit 0vsplit n 1)forms a progressive mesh (PM)representation of M .The PM representation thus captures a continuous sequence of approximations M 0M n that can be quickly traversed for interac-tive level-of-detail control.Moreover,there exists a correspondence between the vertices of any two meshes M c and M f (0c f n )within this sequence,allowing for the construction of smooth vi-sual transitions (geomorphs)between them.A sequence of such geomorphs can be precomputed for smooth runtime LOD.In addi-tion,PM’s support progressive transmission,since the base mesh M 0can be quickly transmitted first,followed the vsplit sequence.Finally,the vsplit records can be encoded concisely,making the PM representation an effective scheme for mesh compression.Topological constraints Because the definitions of ecol and vsplit are such that they preserve the topological type of the mesh (i.e.all K i are homeomorphic),there is a constraint on the min-imum complexity that K 0may achieve.For instance,it is known that the minimal number of vertices for a closed genus g mesh (ori-entable 2-manifold)is (7+(48g +1)12)2if g =2(10if g =2)[16].Also,the presence of boundary components may further constrain the complexity of K 0.Most importantly,K may consist of a number of components,and each is required to appear in the base mesh.For example,the meshes in Figure 7each have 117components.As evident from the figure,the geometry of PM meshes may deteriorate severely as they approach topological lower bound.M 1;100;(1)M 10;511;(7)M 50;4656;(12)M 200;1552277;(28)M 500;3968690;(58)M 2000;14253219;(108)M 5000;029010;(176)M n =34794;0068776;(207)Figure 3:Example of a PSC representation.The image captions indicate the number of principal 012-simplices respectively and the number of connected components (in parenthesis).3PSC REPRESENTATION 3.1Triangulated modelsThe first step towards generalizing PM’s is to let the PSC repre-sentation encode more general triangulated models,instead of just meshes.We denote a triangulated model as a tuple M =(K V D A ).The abstract simplicial complex K is not restricted to 2-manifolds,but may in fact be arbitrary.To represent K in memory,we encode the incidence graph of the simplices using the following linked structures (in C++notation):struct Simplex int dim;//0=vertex,1=edge,2=triangle,...int id;Simplex*children[MAXDIM+1];//[0..dim]List<Simplex*>parents;;To render the model,we draw only the principal simplices ofK ,denoted (K )(i.e.vertices not adjacent to edges,edges not adjacent to triangles,etc.).The discrete attributes D associate amaterial identifier d s with each simplex s(K ).For the sake of simplicity,we avoid explicitly storing surface normals at “corners”(using a set S )as done in [13].Instead we let the material identifier d s contain a smoothing group field [28],and let a normal discontinuity (crease )form between any pair of adjacent triangles with different smoothing groups.Previous vertex unification schemes [21,22]render principal simplices of dimension 0and 1(denoted 01(K ))as points and lines respectively with fixed,device-dependent screen widths.To better approximate the model,we instead define a set A that associates an area a s A with each simplex s 01(K ).We think of a 0-simplex s 00(K )as approximating a sphere with area a s 0,and a 1-simplex s 1=j k 1(K )as approximating a cylinder (with axis (j k ))of area a s 1.To render a simplex s 01(K ),we determine the radius r model of the corresponding sphere or cylinder in modeling space,and project the length r model to obtain the radius r screen in screen pixels.Depending on r screen ,we render the simplex as a polygonal sphere or cylinder with radius r model ,a 2D point or line with thickness 2r screen ,or do not render it at all.This choice based on r screen can be adjusted to mitigate the overhead of introducing polygonal representations of spheres and cylinders.As an example,Figure 3shows an initial model M of 68,776triangles.One of its approximations M 500is a triangulated model with 3968690principal 012-simplices respectively.3.2Level-of-detail sequenceAs in progressive meshes,from a given triangulated model M =M n ,we define a sequence of approximations M i :M 1op 1M 2op 2M n1op n 1M nHere each model M i has exactly i vertices.The simplification op-erator M ivunify iM i +1is the vertex unification transformation,whichmerges two vertices (Section 3.3),and its inverse M igvspl iM i +1is the generalized vertex split transformation (Section 3.4).Thetuple (M 1gvspl 1gvspl n 1)forms a progressive simplicial complex (PSC)representation of M .To construct a PSC representation,we first determine a sequence of vunify transformations simplifying M down to a single vertex,as described in Section 4.After reversing these transformations,we renumber the simplices in the order that they are created,so thateach gvspl i (a i)splits the vertex a i K i into two vertices a i i +1K i +1.As vertices may have different positions in the different models,we denote the position of j in M i as i j .To better approximate a surface model M at lower complexity levels,we initially associate with each (principal)2-simplex s an area a s equal to its triangle area in M .Then,as the model is simplified,wekeep constant the sum of areas a s associated with principal simplices within each manifold component.When2-simplices are eventually reduced to principal1-simplices and0-simplices,their associated areas will provide good estimates of the original component areas.3.3Vertex unification transformationThe transformation vunify(a i b i midp i):M i M i+1takes an arbitrary pair of vertices a i b i K i+1(simplex a i b i need not be present in K i+1)and merges them into a single vertex a i K i. Model M i is created from M i+1by updating each member of the tuple(K V D A)as follows:K:References to b i in all simplices of K are replaced by refer-ences to a i.More precisely,each simplex s in star(b i)K i+1is replaced by simplex(s b i)a i,which we call the ancestor simplex of s.If this ancestor simplex already exists,s is deleted.V:Vertex b is deleted.For simplicity,the position of the re-maining(unified)vertex is set to either the midpoint or is left unchanged.That is,i a=(i+1a+i+1b)2if the boolean parameter midp i is true,or i a=i+1a otherwise.D:Materials are carried through as expected.So,if after the vertex unification an ancestor simplex(s b i)a i K i is a new principal simplex,it receives its material from s K i+1if s is a principal simplex,or else from the single parent s a i K i+1 of s.A:To maintain the initial areas of manifold components,the areasa s of deleted principal simplices are redistributed to manifold-adjacent neighbors.More concretely,the area of each princi-pal d-simplex s deleted during the K update is distributed toa manifold-adjacent d-simplex not in star(a ib i).If no suchneighbor exists and the ancestor of s is a principal simplex,the area a s is distributed to that ancestor simplex.Otherwise,the manifold component(star(a i b i))of s is being squashed be-tween two other manifold components,and a s is discarded. 3.4Generalized vertex split transformation Constructing the PSC representation involves recording the infor-mation necessary to perform the inverse of each vunify i.This inverse is the generalized vertex split gvspl i,which splits a0-simplex a i to introduce an additional0-simplex b i.(As mentioned previously, renumbering of simplices implies b i i+1,so index b i need not be stored explicitly.)Each gvspl i record has the formgvspl i(a i C K i midp i()i C D i C A i)and constructs model M i+1from M i by updating the tuple (K V D A)as follows:K:As illustrated in Figure4,any simplex adjacent to a i in K i can be the vunify result of one of four configurations in K i+1.To construct K i+1,we therefore replace each ancestor simplex s star(a i)in K i by either(1)s,(2)(s a i)i+1,(3)s and(s a i)i+1,or(4)s,(s a i)i+1and s i+1.The choice is determined by a split code associated with s.Thesesplit codes are stored as a code string C Ki ,in which the simplicesstar(a i)are sortedfirst in order of increasing dimension,and then in order of increasing simplex id,as shown in Figure5. V:The new vertex is assigned position i+1i+1=i ai+()i.Theother vertex is given position i+1ai =i ai()i if the boolean pa-rameter midp i is true;otherwise its position remains unchanged.D:The string C Di is used to assign materials d s for each newprincipal simplex.Simplices in C Di ,as well as in C Aibelow,are sorted by simplex dimension and simplex id as in C Ki. A:During reconstruction,we are only interested in the areas a s fors01(K).The string C Ai tracks changes in these areas.Figure4:Effects of split codes on simplices of various dimensions.code string:41422312{}Figure5:Example of split code encoding.3.5PropertiesLevels of detail A graphics application can efficiently transitionbetween models M1M n at runtime by performing a sequence ofvunify or gvspl transformations.Our current research prototype wasnot designed for efficiency;it attains simplification rates of about6000vunify/sec and refinement rates of about5000gvspl/sec.Weexpect that a careful redesign using more efficient data structureswould significantly improve these rates.Geomorphs As in the PM representation,there exists a corre-spondence between the vertices of the models M1M n.Given acoarser model M c and afiner model M f,1c f n,each vertexj K f corresponds to a unique ancestor vertex f c(j)K cfound by recursively traversing the ancestor simplex relations:f c(j)=j j cf c(a j1)j cThis correspondence allows the creation of a smooth visual transi-tion(geomorph)M G()such that M G(1)equals M f and M G(0)looksidentical to M c.The geomorph is defined as the modelM G()=(K f V G()D f A G())in which each vertex position is interpolated between its originalposition in V f and the position of its ancestor in V c:Gj()=()fj+(1)c f c(j)However,we must account for the special rendering of principalsimplices of dimension0and1(Section3.1).For each simplexs01(K f),we interpolate its area usinga G s()=()a f s+(1)a c swhere a c s=0if s01(K c).In addition,we render each simplexs01(K c)01(K f)using area a G s()=(1)a c s.The resultinggeomorph is visually smooth even as principal simplices are intro-duced,removed,or change dimension.The accompanying video demonstrates a sequence of such geomorphs.Progressive transmission As with PM’s,the PSC representa-tion can be progressively transmitted by first sending M 1,followed by the gvspl records.Unlike the base mesh of the PM,M 1always consists of a single vertex,and can therefore be sent in a fixed-size record.The rendering of lower-dimensional simplices as spheres and cylinders helps to quickly convey the overall shape of the model in the early stages of transmission.Model compression Although PSC gvspl are more general than PM vsplit transformations,they offer a surprisingly concise representation of M .Table 1lists the average number of bits re-quired to encode each field of the gvspl records.Using arithmetic coding [30],the vertex id field a i requires log 2i bits,and the boolean parameter midp i requires 0.6–0.9bits for our models.The ()i delta vector is quantized to 16bitsper coordinate (48bits per),and stored as a variable-length field [7,13],requiring about 31bits on average.At first glance,each split code in the code string C K i seems to have 4possible outcomes (except for the split code for 0-simplex a i which has only 2possible outcomes).However,there exist constraints between these split codes.For example,in Figure 5,the code 1for 1-simplex id 1implies that 2-simplex id 1also has code 1.This in turn implies that 1-simplex id 2cannot have code 2.Similarly,code 2for 1-simplex id 3implies a code 2for 2-simplex id 2,which in turn implies that 1-simplex id 4cannot have code 1.These constraints,illustrated in the “scoreboard”of Figure 6,can be summarized using the following two rules:(1)If a simplex has split code c12,all of its parents havesplit code c .(2)If a simplex has split code 3,none of its parents have splitcode 4.As we encode split codes in C K i left to right,we apply these two rules (and their contrapositives)transitively to constrain the possible outcomes for split codes yet to be ing arithmetic coding with uniform outcome probabilities,these constraints reduce the code string length in Figure 6from 15bits to 102bits.In our models,the constraints reduce the code string from 30bits to 14bits on average.The code string is further reduced using a non-uniform probability model.We create an array T [0dim ][015]of encoding tables,indexed by simplex dimension (0..dim)and by the set of possible (constrained)split codes (a 4-bit mask).For each simplex s ,we encode its split code c using the probability distribution found in T [s dim ][s codes mask ].For 2-dimensional models,only 10of the 48tables are non-trivial,and each table contains at most 4probabilities,so the total size of the probability model is small.These encoding tables reduce the code strings to approximately 8bits as shown in Table 1.By comparison,the PM representation requires approximately 5bits for the same information,but of course it disallows topological changes.To provide more intuition for the efficiency of the PSC repre-sentation,we note that capturing the connectivity of an average 2-manifold simplicial complex (n vertices,3n edges,and 2n trian-gles)requires ni =1(log 2i +8)n (log 2n +7)bits with PSC encoding,versus n (12log 2n +95)bits with a traditional one-way incidence graph representation.For improved compression,it would be best to use a hybrid PM +PSC representation,in which the more concise PM vertex split encoding is used when the local neighborhood is an orientableFigure 6:Constraints on the split codes for the simplices in the example of Figure 5.Table 1:Compression results and construction times.Object#verts Space required (bits/n )Trad.Con.n K V D Arepr.time a i C K i midp i (v )i C D i C Ai bits/n hrs.drumset 34,79412.28.20.928.1 4.10.453.9146.1 4.3destroyer 83,79913.38.30.723.1 2.10.347.8154.114.1chandelier 36,62712.47.60.828.6 3.40.853.6143.6 3.6schooner 119,73413.48.60.727.2 2.5 1.353.7148.722.2sandal 4,6289.28.00.733.4 1.50.052.8123.20.4castle 15,08211.0 1.20.630.70.0-43.5-0.5cessna 6,7959.67.60.632.2 2.50.152.6132.10.5harley 28,84711.97.90.930.5 1.40.453.0135.7 3.52-dimensional manifold (this occurs on average 93%of the time in our examples).To compress C D i ,we predict the material for each new principalsimplex sstar(a i )star(b i )K i +1by constructing an ordered set D s of materials found in star(a i )K i .To improve the coding model,the first materials in D s are those of principal simplices in star(s )K i where s is the ancestor of s ;the remainingmaterials in star(a i )K i are appended to D s .The entry in C D i associated with s is the index of its material in D s ,encoded arithmetically.If the material of s is not present in D s ,it is specified explicitly as a global index in D .We encode C A i by specifying the area a s for each new principalsimplex s 01(star(a i )star(b i ))K i +1.To account for this redistribution of area,we identify the principal simplex from which s receives its area by specifying its index in 01(star(a i ))K i .The column labeled in Table 1sums the bits of each field of the gvspl records.Multiplying by the number n of vertices in M gives the total number of bits for the PSC representation of the model (e.g.500KB for the destroyer).By way of compari-son,the next column shows the number of bits per vertex required in a traditional “IndexedFaceSet”representation,with quantization of 16bits per coordinate and arithmetic coding of face materials (3n 16+2n 3log 2n +materials).4PSC CONSTRUCTIONIn this section,we describe a scheme for iteratively choosing pairs of vertices to unify,in order to construct a PSC representation.Our algorithm,a generalization of [13],is time-intensive,seeking high quality approximations.It should be emphasized that many quality metrics are possible.For instance,the quadric error metric recently introduced by Garland and Heckbert [9]provides a different trade-off of execution speed and visual quality.As in [13,20],we first compute a cost E for each candidate vunify transformation,and enter the candidates into a priority queueordered by ascending cost.Then,in each iteration i =n 11,we perform the vunify at the front of the queue and update the costs of affected candidates.4.1Forming set of candidate vertex pairs In principle,we could enter all possible pairs of vertices from M into the priority queue,but this would be prohibitively expensive since simplification would then require at least O(n2log n)time.Instead, we would like to consider only a smaller set of candidate vertex pairs.Naturally,should include the1-simplices of K.Additional pairs should also be included in to allow distinct connected com-ponents of M to merge and to facilitate topological changes.We considered several schemes for forming these additional pairs,in-cluding binning,octrees,and k-closest neighbor graphs,but opted for the Delaunay triangulation because of its adaptability on models containing components at different scales.We compute the Delaunay triangulation of the vertices of M, represented as a3-dimensional simplicial complex K DT.We define the initial set to contain both the1-simplices of K and the subset of1-simplices of K DT that connect vertices in different connected components of K.During the simplification process,we apply each vertex unification performed on M to as well in order to keep consistent the set of candidate pairs.For models in3,star(a i)has constant size in the average case,and the overall simplification algorithm requires O(n log n) time.(In the worst case,it could require O(n2log n)time.)4.2Selecting vertex unifications fromFor each candidate vertex pair(a b),the associated vunify(a b):M i M i+1is assigned the costE=E dist+E disc+E area+E foldAs in[13],thefirst term is E dist=E dist(M i)E dist(M i+1),where E dist(M)measures the geometric accuracy of the approximate model M.Conceptually,E dist(M)approximates the continuous integralMd2(M)where d(M)is the Euclidean distance of the point to the closest point on M.We discretize this integral by defining E dist(M)as the sum of squared distances to M from a dense set of points X sampled from the original model M.We sample X from the set of principal simplices in K—a strategy that generalizes to arbitrary triangulated models.In[13],E disc(M)measures the geometric accuracy of disconti-nuity curves formed by a set of sharp edges in the mesh.For the PSC representation,we generalize the concept of sharp edges to that of sharp simplices in K—a simplex is sharp either if it is a boundary simplex or if two of its parents are principal simplices with different material identifiers.The energy E disc is defined as the sum of squared distances from a set X disc of points sampled from sharp simplices to the discontinuity components from which they were sampled.Minimization of E disc therefore preserves the geom-etry of material boundaries,normal discontinuities(creases),and triangulation boundaries(including boundary curves of a surface and endpoints of a curve).We have found it useful to introduce a term E area that penalizes surface stretching(a more sophisticated version of the regularizing E spring term of[13]).Let A i+1N be the sum of triangle areas in the neighborhood star(a i)star(b i)K i+1,and A i N the sum of triangle areas in star(a i)K i.The mean squared displacement over the neighborhood N due to the change in area can be approx-imated as disp2=12(A i+1NA iN)2.We let E area=X N disp2,where X N is the number of points X projecting in the neighborhood. To prevent model self-intersections,the last term E fold penalizes surface folding.We compute the rotation of each oriented triangle in the neighborhood due to the vertex unification(as in[10,20]).If any rotation exceeds a threshold angle value,we set E fold to a large constant.Unlike[13],we do not optimize over the vertex position i a, but simply evaluate E for i a i+1a i+1b(i+1a+i+1b)2and choose the best one.This speeds up the optimization,improves model compression,and allows us to introduce non-quadratic energy terms like E area.5RESULTSTable1gives quantitative results for the examples in thefigures and in the video.Simplification times for our prototype are measured on an SGI Indigo2Extreme(150MHz R4400).Although these times may appear prohibitive,PSC construction is an off-line task that only needs to be performed once per model.Figure9highlights some of the benefits of the PSC representa-tion.The pearls in the chandelier model are initially disconnected tetrahedra;these tetrahedra merge and collapse into1-d curves in lower-complexity approximations.Similarly,the numerous polyg-onal ropes in the schooner model are simplified into curves which can be rendered as line segments.The straps of the sandal model initially have some thickness;the top and bottom sides of these straps merge in the simplification.Also note the disappearance of the holes on the sandal straps.The castle example demonstrates that the original model need not be a mesh;here M is a1-dimensional non-manifold obtained by extracting edges from an image.6RELATED WORKThere are numerous schemes for representing and simplifying tri-angulations in computer graphics.A common special case is that of subdivided2-manifolds(meshes).Garland and Heckbert[12] provide a recent survey of mesh simplification techniques.Several methods simplify a given model through a sequence of edge col-lapse transformations[10,13,14,20].With the exception of[20], these methods constrain edge collapses to preserve the topological type of the model(e.g.disallow the collapse of a tetrahedron into a triangle).Our work is closely related to several schemes that generalize the notion of edge collapse to that of vertex unification,whereby separate connected components of the model are allowed to merge and triangles may be collapsed into lower dimensional simplices. Rossignac and Borrel[21]overlay a uniform cubical lattice on the object,and merge together vertices that lie in the same cubes. Schaufler and St¨u rzlinger[22]develop a similar scheme in which vertices are merged using a hierarchical clustering algorithm.Lue-bke[18]introduces a scheme for locally adapting the complexity of a scene at runtime using a clustering octree.In these schemes, the approximating models correspond to simplicial complexes that would result from a set of vunify transformations(Section3.3).Our approach differs in that we order the vunify in a carefully optimized sequence.More importantly,we define not only a simplification process,but also a new representation for the model using an en-coding of gvspl=vunify1transformations.Recent,independent work by Schmalstieg and Schaufler[23]de-velops a similar strategy of encoding a model using a sequence of vertex split transformations.Their scheme differs in that it tracks only triangles,and therefore requires regular,2-dimensional trian-gulations.Hence,it does not allow lower-dimensional simplices in the model approximations,and does not generalize to higher dimensions.Some simplification schemes make use of an intermediate vol-umetric representation to allow topological changes to the model. He et al.[11]convert a mesh into a binary inside/outside function discretized on a three-dimensional grid,low-passfilter this function,。
算法的论文
算法的论文以下是一些著名的算法论文:1. "A Fast Algorithm for Particle Simulations" - Leslie Greengard, Vladimir Rokhlin(1987)该论文提出了快速多极子方法(Fast Multipole Method, FMM),广泛应用于粒子模拟和计算机图形学中。
2. "An Efficient Parallel Algorithm for Convex Hulls in Two Dimensions" - Timothy Chan(1996)该论文提出了线性时间复杂度的二维凸包算法,对于计算凸包非常高效。
3. "A Fast Algorithm for Approximate String Matching" - Wu, S.M.; Manber, U.(1992)该论文提出了经典的字符串匹配算法——Wu-Manber算法,通过利用位运算技术,实现了高效的近似匹配。
4. "PageRank: Bringing Order to the Web" - Sergey Brin, Lawrence Page(1998)该论文介绍了PageRank算法,用于评估网页的重要性,为谷歌搜索引擎的核心算法。
5. "An O(n log n) Algorithm for Implicit Dual Graph Enumeration" - Jonathan Shewchuk(1997)该论文提出了计算三维内隐图的线性对数时间复杂度算法,为计算机图形学中的几何建模和网格生成提供了重要基础。
6. "A Fast Algorithm for the Belief Propagation" - Yair Weiss (2001)该论文提出了信念传播算法(Belief Propagation),在概率图模型和机器学习中得到广泛应用。
投资组合优化模型的一个序列凸近似算法
投资组合优化模型的一个序列凸近似算法李卫国;张宏伟;梁锡军【摘要】以CVaR为代表的凸优化投资组合模型近年来引起了广泛研究.为克服传统投资组合模型中凸近似的不足,提出了一个投资组合的DC规划模型.该模型用一个DC函数替代了CVaR模型中的凸近似函数,同时要求所有约束条件在概率意义下成立.进一步地,提出了一个序列凸近似(SCA)算法用于求解DC规划问题,并运用Monte-Carlo方法来实现SCA算法.初步的实验结果表明,因子收益服从"尖峰厚尾"分布时,模型的目标函数值优于采用CVaR近似的目标函数值.%CVaR has drawn extensive attentions as a representative convex optimization portfolio model in recent years.To overcome the limits of convex approximations in traditional portfolio models,a DC programming model for portfolio is proposed.In the proposed programming model,a DC function is used as a surrogate for the convex approximation function in the CVaR model.All the constraints are satisfied in the probabilistic sense in the DC programming problem.Moreover,a sequential convex approximation (SCA)algorithm is designed to solve the DC programming problem. The SCA algorithm is implemented by employing Monte-Carlo method.Preliminary experimental results have shown that the obj ective function values of the DC programming are better than those with CVaR approximation when the income factors sati sfy″high peak and fat tail″distributions.【期刊名称】《大连理工大学学报》【年(卷),期】2017(057)003【总页数】6页(P321-326)【关键词】投资组合;序列凸近似;凸优化;Monte-Carlo方法【作者】李卫国;张宏伟;梁锡军【作者单位】大连理工大学数学科学学院,辽宁大连 116024;辽宁地质工程职业学院,辽宁丹东 118303;大连理工大学数学科学学院,辽宁大连 116024;中国石油大学(华东)理学院,山东青岛 266580【正文语种】中文【中图分类】O224投资组合是指投资者根据其风险喜好在众多的有价证券中对风险投入进行最优投资分配.投资组合选择问题最早由Markowitz[1]作为一个最优化问题提出.他用随机收益率的均值来衡量预期收益的好坏,用随机收益率的方差衡量风险的大小.Markowitz的均值-方差模型在现代投资理论中堪称经典,并且始终在改进.例如文献[2]对这些模型作了一个系统的总结.只有当证券收益率服从正态分布或者投资者是风险厌恶型时,均值-方差模型才是有效的.但由于计算的复杂性,在投资数额较大的优化问题中模型的使用率并不高.本文试图改进这一模型,研究不同的预期收益或风险衡量标准,使得模型更符合实际,更好地为投资者决策提供参考.投资者经常会遇到投资项目的组合决策问题,要考虑的因素有收益率、风险、增长潜力等条件,希望该资产投资波动越小越好,并进行权衡考虑获得一个最佳的投资方案.在投资组合的优化研究过程中,本文试图在传统的保守近似优化模型的基础上,克服指示函数I(0,+∞)(z)在近似估计中的不足.通过引入风险度量的DC(difference of two convex functions)近似,给出一个投资组合的DC规划模型,并提出一个序列凸近似(sequential convex approximation,SCA)算法来进行求解,用一个严格凸二次函数来近似目标函数中的光滑函数,用线性函数近似所有DC函数的第二个凸函数,得到搜索方向的一系列的凸优化问题.考虑如下问题:对n个资产投资以获取最大收益.记x=(x1 x2 … xn)T为n个资产的投资比例令x∈X∶=Rn.各资产的收益r=(r1 r2 … rn)T为随机向量,假定其满足如下关系:式中:μ为资产收益的均值,;V为因子荷载矩阵,VT=(V1 V2 … Vn);ξ为因子收益,ξ=(ξ1 ξ2 … ξn)T服从F分布(尖峰厚尾);ε~N(0,D),D为对称半正定矩阵,ε为白噪声.极大化所研究资产的平均收益:其约束条件被称为决策风险[3],用来描述,其中1=(1 1 … 1)T∈Rn,β∈(0,1)是一个较小的数,a>0是保守收益的一个估计.同时希望该资产的投资波动越小越好.采用var(rTx)=xTDx,作为投资波动的度量.考虑如下模型:max E[rTx]=μTx+xTVTEF(ξ)-γxTDxs. t. Prob{-(μTx+xTVTξ)≤-a}≥1-β1Tx=1,x≥0其中γ>0是参数.考虑模型(1)中的概率约束,令p(x)=1-Prob{-(μTx+xTVTξ)+a≤0}= Prob{-(μTx+xTVTξ)+a≥0}则约束条件其中这里IA(·)表示集合A上的指示函数:在Rockafellar等[4]提出的CVaR近似中,用近似I(0,+∞)(z),其中z>0,[z]+=max{z,0}.Nemirovski等[5]曾经指出在所有的凸的保守近似中,CVaR被公认为是最出色的.但是,ψ(z,t) 对于指示函数I(0,+∞)(z)不是一个好的近似,因为在z>0且z较大时,两个函数差异较大.为寻求一个更好的近似,令由于ψ(z,t)和φ(z,t)都是z的凸函数,π(z,t)是一个关于z的DC函数.函数π(z,t)仅在区间(-t,0)与指示函数有差异,在其余的区间与指示函数完全吻合.可见,DC函数π(z,t)是指示函数的一个更好的近似,如图1所示.令g1(x,t)=E[μTx+xTVTξ-a+t]+ g2(x)=g1(x,0) p^(x,t)=当t>0时,p^(x,t)是p(x)的一个保守DC近似.令,则p^(x,t)≤β ⟹因此,是p^(x,t)所有近似中最好的保守近似.maxμTx+xTVTEF(ξ)-γxTDxs.t.1Tx=1,x≥0称模型(2)为模型(1)的DC近似[6].约束条件可近似为≤β,即用下面的模型(3)近似模型(2).max μTx+xTVTEF(ξ)-γxTDxs.t. g1(x,t)-g2(x)≤βt 1Tx=1,x≥0记Ω(t)为模型(3)的可行域:Ω(t)∶={x∈X:g1(x,t)-g2(x)≤βt, 1Tx=1,x≥0}算法1是求解模型(3)的序列凸近似算法.算法1 序列凸近似(sequential convex approximation,SCA)算法SCA算法具体步骤如下:Step 1 选取x0∈Ω(t),k=0.Step 2 若xk是最优解,算法终止.Step 3 用Monte-Carlo方法[6]求解下列凸规划问题:max μTx+xTVTEF(ξ)-γxTDxs.t. g1(x,t)-[g2(xk)+〈g2(xk),x-xk〉]≤βt 1Tx=1,x≥0得最优解xk+1.Step 4 k∶=k+1,转Step 2.2.1 凸规划问题(4)的求解依照前面的记号c(x,ξ)=μTx+xTVTξ-a g1(x,t)=E[c(x,ξ)+t]+= E[I[0,+∞)(c(x,ξ)+t)]g2(x,t)=g1(x,0)另外,记h(x)为问题(4)的目标函数:则有令则记ξ1,ξ2,…,ξn为随机变量ξ的独立同分布的样本点.对g(x)的一个自然的估计是对E(ξ)的估计是.建议求解s.t. 1Tx=1,x≥02.2 g(x)的近似为了在n较大时有效地求解问题(4),给出下面的方法:由式(5)、(6)及文献[7]引理2知,则g(x)可以近似为当n较大时,用g(x)作为g(x)的近似,并直接用基于梯度[8]的方法求解问题(4).该方法可以视为用近似的g(x)、g(x)及E(ξ)直接求解问题(4).当采用基于梯度的方法求解问题(4)时,样本点仅用于计算(x)和g(x)的值.所需的计算量是O(n).这是求解问题(4)的一种较快的方法.2.3 初始点的选取为执行SCA算法,需要选取初始点x0∈Ω(t),给出两种选取办法.第一种,记注意到,g2(x)=E[μTx+xTVTξ-a]+≥0,∀x∈X.故Ω0(t)⊆Ω(t).另外,由于g1(x,t)是关于x的凸函数,故Ω0(t)是凸集合.于是,是凸规划.令xε=arg min{h(x):x∈Ω0(t)},则xε∈Ω(t).第二种,令ΩCVaR={x∈X:CVaR1-βc(x,ξ)≤0}.依据前面的讨论,令xCVaR∈arg min{h(x):x∈ΩCVaR,1Tx=1,x≥0},即Rockafellar和Uryasev 给出的CVaR近似的最优解.令t*=q1-β(c(xCVaR,ξ)),即c(xCVaR,ξ)的1-β分位数.由文献[9],t*>0且于是,xCVaR∈{x∈X:g1(x,t*)≤t*β}.由于g2(x)≥0,故xCVaR∈{x∈X:g1(x,t*)-g2(x)≤t*β}=Ω(t*).对于任意t∈(0,t*],Ω(t*)⊆Ω(t).因此,xCVaR∈Ω(t),0<t≤t*.可以首先求解CVaR近似问题得到xCVaR,然后选取t∈(0,t*],则xCVaR可以用作SCA算法的初始点.若使用x0=xCVaR,则SCA 算法产生的迭代点列{xk}将改进或至少等价于CVaR近似解.(1)CVaR近似解的计算xCVaR=arg min{h(x):CVaR1-βc(x,ξ)≤0,1Tx=1,x≥0}(2)CVaR分位数的计算记L是一随机损失,FL(y)=Prob{L≤y}是L的累积分布函数.对于任意α∈(0,1),则损失L的α-VaR定义为定义为由文献[10]知道令L1,L2,…,Ln是损失L的n个独立同分布的观测,则L的α-VaR可以估计为其中是排序后的n个观测中的第i个观测.L的α-CVaR可以估计为(3)CVaR分位数的梯度估计假设随机损失L是参数θ的函数,记为L(θ).L(θ)关于θ可微.对任意的θ,设vα(θ)、cα(θ) 是L(θ)的α-VaR和α-CVaR,0<α<1,它们都是θ的函数.依据文献[10]定理3.1,在适当的条件下,对于任意的θ,记(L1,D1),(L2,D2),…,(Ln,Dn)为(L(θ),L′(θ))的n个独立同分布的观测.提出c′α(θ)的估计:采用下面的数据进行测试:各资产的平均收益μ=(1.0 1.2 1.4 1.6 1.8)T,期望收益a=1.5,因子荷载矩阵方差-协方差矩阵实验测试ξ=(ξ1 ξ2 … ξp)T服从如下两种分布的情形.(1)ξ服从F分布:ξi~F(i+2,i+4),i=1,2,…,p;(2)ξ服从正态分布:ξi~N(πi,ρi2),i=1,2,…,p,为了比对两种情形,取均值πi、方差ρi2与情形(1)中相应的F分布的均值和方差相同.序列凸近似算法的参数设为γ=1.0,β=0.05,t=0.01.算法在Matlab 2012a平台下编程实现,在Intel Core i7-4770 CPU 3.40 GHz,8 GB RAM计算机上执行.实验分别测试了-近似解和CVaR近似得到的解作为SCA算法的初始点.随机变量ξ的抽样次数为1.0×105.图2中给出了目标函数值f随迭代次数k的变化,ξ分别服从F分布和正态分布.可以看出,无论ξ服从F分布还是正态分布,CVaR初始点处的目标函数值大于-近似解处的目标函数值,并且在两种不同的初始点下,目标函数值随迭代次数的增加而增加,最终近乎收敛于共同的函数值.ξ服从F分布时(图2(a)),算法改进了-近似的目标函数值(1.605 6)和CVaR近似的目标函数值(1.608 0):算法收敛时的目标函数值为1.621 2.两种初始点计算出的最优解皆为x*=(0 0 0.171 2 0 0.828 8)T.可见模型选择了第3个和第5个资产进行资产配置.ξ服从正态分布时(图2(b)),算法改进了-近似的目标函数值(1.618 2)和CVaR近似的目标函数值(1.618 3):算法收敛时的目标函数值为1.618 7.两种初始点计算出的最优解皆为x*=(0 0 0.203 8 0 0.796 2)T.可见模型仍选择了第3个和第5个资产进行资产配置,但资产配置比例与ξ服从F分布时的情形有差别.为测试抽样规模的影响,实验比较了不同抽样规模下的目标函数值以及计算时间(单位:s),如图3所示(ξ服从F分布).在每个抽样规模下,进行了100次重复实验,目标函数值和计算时间取其平均值,图中画出了其标准差(每个柱线段的长度是相应标准差的2倍).由图3(a)可以看出,目标函数值的标准差在抽样规模N大于0.5×105时趋于稳定(标准差小于1.0×10-3);图3(b)显示,计算时间随抽样规模的增长而增加.ξ服从正态分布时有类似的规律,见图4.本文考虑因子收益ξ服从“尖峰厚尾”分布的情形,例如F分布,用DC函数来近似概率约束中的指示函数,将资产投资组合问题建模为一个DC规划,并提出了求解该DC规划的序列凸近似(SCA)算法.该算法通过迭代求解一系列凸二次规划问题,来计算原问题最优解.通过所提出的梯度近似计算方法,减少了算法的计算量.初步的数值实验结果表明,所提出的模型及SCA算法是有效的.因子收益ξ服从F分布时,目标函数值优于采用CVaR近似的目标函数值.【相关文献】[1] MARKOWITZ H M. Portfolio selection [J]. Journal of Finance, 1952, 7(1):77-91.[2] MITRA G, KYRIAKIS T, LUCAS C, et al. A review of portfolio planning:models and systems [J]. Advances in Portfolio Construction and Implementation, 2003, 26(1):1-39. [3] GOLDFARB D, IYENGAR G. Robust portfolio selection problems [J]. Mathematics of Operations Research, 2003, 28(1):1-38.[4] ROCKAFELLAR R T, URYASEV S. Optimization of conditional value-at-risk [J]. Journalof Risk, 2000, 2(3):21-40.[5] NEMIROVSKI A, SHAPIRO A. Convex approximations of chance constrained programms [J]. SIAM Journal on Optimization, 2006, 17(4):969-996.[6] HONG L J, YANG Yi, ZHANG Liwei. Sequential convex approximations to joint chance constrained programms: a Monte Carlo approach [J]. Operations Research, 2011,59(3):617-630.[7] GLASSERMAN P. Monte Carlo Methods in Financial Engineering [M]. New York:Springer, 2004.[8] FREUND R M. Subgradient optimization, generalized programming, and nonconvex duality [R]. Cambridge: Massachusetts Institute of Technology, 2004.[9] PFLUG G C. Some remarks on the value-at-risk and the conditional value-at-risk [M] // Probabilistic Constrained Optimization: Methodology and Applications. New York: Springer US, 2000:272-281.[10] HONG L J, LIU Guangwu. Simulating sensitivities of conditional value-at-risk [J]. Management Science, 2009, 55(2):281-293.。
Joint_Slot_Scheduling_and_Power_Allocation_in_Clus

LetterJoint Slot Scheduling and Power Allocation in ClusteredUnderwater Acoustic Sensor NetworksZhi-Xin Liu, Xiao-Cao Jin, Yuan-Ai Xie, and Yi YangDear Editor,This letter deals with the joint slot scheduling and power alloca-tion in clustered underwater acoustic sensor networks (UASNs),based on the known clustering and routing information, to maximize the network’s energy efficiency (EE). Based on the block coordi-nated decent (BCD) method, the formulated mixed-integer non-con-vex problem is alternatively optimized by leveraging the Kuhn-Munkres algorithm, the Dinkelbach’s method and the successive con-vex approximation (SCA) technique. Numerical results show that the proposed scheme has a better performance in maximizing EE com-pared to the separate optimization methods.Recently, the interest in the research and development of underwa-ter medium access control (MAC) protocol is growing due to its potentially large impact on the network throughput. However, the focus of many previous works is at the MAC layer only, which may lead to inefficiency in utilizing the network resources [1]. To obtain a better network performance, the approach of cross-layer design has been considered. In [1], Shi and Fapojuwo proposed a cross-layer optimization scheme to the scheduling problem in clustered UASNs.However, power allocation and slot scheduling were separately designed in [1], which cannot guarantee a global optimum solution.In [2], a power control strategy was introduced to achieve the mini-mum-frame-length slot scheduling. However, EE, as a non-negligi-ble aspect of network performance, is not being considered in [2].In this letter, we formulate a joint slot scheduling and power allo-cation optimization problem to maximize the network’s EE in clus-tered UASNs. The formulated problem with coupled variables is non-convex and mixed-integer, which is challenging to be solved.We propose an efficient iterative algorithm to solve it. Numerical results demonstrate the effectiveness of our proposed algorithm.N ≜{1,2,...,N }K ≜{1,2,...,K }M ≜{1,2,...,M }Problem statement: A clustered UASN with N sensor nodes grouped into K clusters is considered in this article, with the sets and . Sensor nodes’ operation time in a frame consists of M equal and length-fixed time slots with the index set . The sensor nodes send carriers at the same frequency. The half-duplex (HD) mode and the decode-and-for-ward (DF) mode are adopted for data relaying. The data packet length is assumed equal to the length of the time slot. Since packet collisions occur at the receiver but not the sender, we optimize the slot scheduling from the perspective of signal arrival time. As shown in Fig. 1, packets are scheduled to reach the destination at specific time slots. To avoid collisions, the arriving packets cannot overlap with each other as shown in the example of the packets at the sink from CH1, CH2 and CH3 in Fig. 1.z n =(M ,[t ,1])∈R M ×1M −1We use the sparse vector (which means the t -th element is 1 and the rest elements are 0) to represent the scheduling indicator, i.e., the t -th time slot is assigned to node n to Z ≜{z 1,z 2,...,z N }p n P ≜{p 1,p 2,...,p N }B log 2(1+γn )γn deliver data. Then the slot scheduling of the overall network can beexpressed by the set . The allocated transmission power of node n is denoted as , with the corresponding set of the overall network . By Shannon’s law, the achiev-able link rate of node n to its receiver can be given by R n =, where B is the bandwidth, and is the signal-to-interference-and-noise ratio (SINR) at the receiver of node n , which can be written asg nn n N 0(f )where is the link’s channel gain from node to the receiver of node n , is the power spectral density (p.s.d.) ofthe ambient noises at the receiver (refer to [3]), and binary variablen n n ∈N tionships between node n and node , where .We regard the links connecting to the sink (i.e., sea surface buoy node) directly as the bottleneck links, then the EE maximization˙KK Q k ≜{1,2,...,Q k }C (z k )k ∈˙Kγth NR th T p C 1C 2C 3C 4M min M max C 5C 6z k i ,j where is the set of the links connecting to the sinkdirectly, is the remaining part of after removing the cluster con-taining the sink, is the set of cluster members (CMs) in k -th cluster, represents the set of time slots occupiedby the cluster head (CH) to transmit data, is the required SINR threshold for each link, is the required threshold of net-work rate for the entire network, and is a constant integer. is the transmission power constraint. is the SINR constraint to ensure that the signals can be correctly demoduled as shown in the example of CH3 in Fig. 1. indicates that the output link rate of CH k is restrained by the rate of its subnetwork, which ensures that the links connecting to the sink directly are the bottleneck links. is the integer constraint of M ranging from to . is the required minimum network rate constraint. denotes is a binary variable, which is set as 1 when the j -th time slot is occupied by theCorresponding author: Zhi-Xin Liu.Citation: Z.-X. Liu, X.-C. Jin, Y.-A. Xie, and Y. Yang, “Joint slot scheduling and power allocation in clustered underwater acoustic sensor networks,” IEEE/CAA J. Autom. Sinica , vol. 10, no. 6, pp. 1501–1503, Jun.2023.The authors are with the School of Electrical Engineering, Yanshan University, Qinhuangdao 066004, China (e-mail:Color versions of one or more of the figures in this paper are available online at .Digital Object Identifier 10.1109/JAS.2022.106031CH1CH2CH2CH1CH3CH3Slot1Signal packetInterference packetSlot2Slot3Slot4Slot5SinkFig. 1. Receiver-synchronized slot scheduling table.C 7C 8C 9C 10i -th CM of the k -th cluster. denotes that each time slot accommo-dates at most one node in a cluster, which is given to avoid packetcollisions. denotes that each node is assigned one and only onetime slot to deliver data in a frame. denotes that the HD mode is adopted, thus CHs could not transmit and receive data simultane-ously as shown in the example of CH1 in Fig. 1. is the con-straint for CHs to ensure that frames will not affect each other.P Z C 2C 3C 5P Z Problem solution: The optimization problem (3) is a non-convex and mixed-integer optimization problem, which cannot be solved directly due to the challenge that the variables M , and are always coupled with each other in , , and the objective function. To tackle the coupled variables, firstly, the exhaustive search method is adopted to solve the variable M , then a BCD-based alternating optimization method is utilized to decouple and .P Z∗Given the , and M , sensors’ optimal slot scheduling solution Q k M Q k M each node is assigned one and only one slot to deliver data and each slot accommodates at most one node in a cluster, the slot scheduling problem in a cluster can be modeled as a weighted matching prob-lem for a bipartite graph, in which the CMs in the k -th cluster and the M time slots can be partitioned into two independent and disjoint sets and such that every edge connects a node in to a time slot in . The weight of the edge is defined as the network rate. Then problem (4) can be solved by the Kuhn-Munkres algorithm proposed in [4]. The process, that optimizing the slot scheduling of a cluster while keeping the other clusters unchangeable, continues until all the clusters are optimized. After a round of optimization, if the network rate is improved, another optimization round will be performed until the network rate no longer increases.C 2Although any two nodes in the same cluster have no mutual inter-ference, it still should be noted that a node in other clusters may be interfered by multi nodes in the optimization cluster. That means the optimal matching obtained by the Kuhn-Munkres algorithm may unsatisfy . For solving this problem, Criterion 1 is proposed to search for the eligible slot scheduling scheme.B B B Criterion 1: Supposing node A is the node unsatisfying the SINR constraint, firstly, we find its interference nodes (called set ) who belong to the optimization cluster. Then, we sort set in descending order in terms of the interference intensity to node A to find the node having the largest interference to node A (called node C). If nodeC has more than one available time slot, the previous assigned slot is forbidden to be assigned to node C. Otherwise, other nodes’ time slot will be checked and forbidden in same fashion unless there are no more time slot that can be forbidden in .Z P∗Given the and , sensors’ optimal transmission power solution can be optimized by solving the following problem:C 3C 5P C 3R k ∀k ∈˙K R k =B log 2A k −B log 2H k A k =p k g kk +∑∀k k ∈N δk (z k )p k g kk +N 0(f )B H k =∑∀k k ∈N δk (z k )p k g kk +N 0(f )B ∑i v i ≥∏i (v i /θi )θiv i ≥0θi >0∑i θi =1∑v objective function and the constraints and with respect to .To obtain a convex upper bound of the left-hand side (LHS) of ,we note that , , can be rewritten as , where , and. Making use of the deformation of arithmetic-geometric mean inequality, which states thatwith , and (the equality happensRk =B log 2A k −B f (P )R k ≤R k ,∀k ∈K ˜pn =ln p n ∀p n ∈P Letting , we have . And the equality happens when (7) holds. Letting , , it isC 3To obtain a concave lower bound of the right-hand side (RHS) of , the logarithmic approximation method used in [5] is adopted.ˇRl ,∀l ∈L ,R l ,∀l ∈L ,C 5˜pn =ln p n ∀p n ∈P of in the objective function and . Substitut-ing the undesired terms in (5) with the upper or lower boundsobtained above, and letting , , problem (5) can be12N ˜Ptional function with a concave numerator and a convex denominatorin terms of the transmission power , and the constraints are all con-vex. Therefore, we can exploit the Dinkelbach’s method [6] to trans-form it into the equivalent convex problemP The optimal solution of problem (5) can be obtained by solving the equivalent convex problem (13) iteratively, which can be tackled with existing optimization tools like CVX. The pseudocode of the optimization process in terms of sensors’ transmission power is shown in Algorithm 1.The pseudocode of the BCD-based alternating optimization algo-rithm is shown in Algorithm 2, in which two variable blocks are opti-mized alteratively corresponding to the two optimization subprob-lems (i.e., the slot scheduling subproblem and the power allocation subproblem) in each iteration of the alternating optimization process.f =10B =2P max =Simulation results: We consider a 10 km × 10 km × 200 m area,where N = 30 underwater sensor nodes deployed randomly at differ-ent sea depths are divided K clusters. We assume that the sensors are stationary, and the data in each sensor’s buffer is always sufficient.We take the carrier frequency kHz, kHz and 2 W.P 0Z 0For assessing the performance of the proposed alternating-opti-mization-based joint slot scheduling and power allocation algorithm (denoted as AO), we present three other schemes as contrasts, which include two kinds of separate optimization methods and the power allocation scheme and the slot scheduling scheme obtained by the proposed CMS-MAC algorithm in [2]. The two separate opti-mization methods are summarized as follows:Algorithm 1 Power Control Algorithm Based on the SCA Technique andthe Dinkelbach’s Methodτεt ←−0˜P{t }←−{ln p 1,ln p 2,...,ln p N }P 1: Set the maximum number of iterations and the maximum tolerance .Initialize iteration index and , where is the input powers;2: repeath ←−0˜P {h }temp←−˜P {t }3: Initialize iteration index and ;η{t }EE ˜P{t }4: Compute with given ;5: repeat αl =γl (˜P {h }temp )1+γl (˜P {h }temp )βl =ln1+γl (˜P {h }temp )γαl l(˜P {h }temp ) ∀l ∈L αq =γq (˜P {h }temp )1+γq (˜P {h }temp )βq =ln 1+γq (˜P {h }temp )γαq q (˜P {h }temp) ∀q ∈Q k ∀k ∈˙K θk ∀k k ∈N θN ∀k ∈˙K˜P {h }temp 6: Compute , , , , , , , and compute ,, , by (7) with given ;η{t }EE Z ˜P {h +1}temp7: Solve (13) with the given and , and obtain the optimal ;h ←−h +18: Update ;˜P h temp ˜P ∗temp 9: until converge to the optimal solution ;˜P{t +1}←−˜P ∗temp 10: ;t ←−t +111: Update ; f (η{t −1}EE )<ε,or t ≥τ12: until ;P ∗={e ˜p{t }1,e ˜p {t }2,...,e ˜p {t }N }13: Obtain the optimal solution ;Algorithm 2 Alternating-Optimization-Based Joint Time Slot Scheduling and Power Allocation AlgorithmM min M max P 0Z 0M min 1: Obtain the low bound and the upper bound of M , and the power allocation solution and the slot scheduling scheme under by the algorithm proposed in [2];ε2: Set the maximum tolerance ;M =M min ;M ≤M max ;M ++3: for do l ←04: Initialize iteration index ;Z {l }M ←Z 0P {l }M ←P 05: Initialize , and ;6: repeatP {l }M Z {l }M Z {l +1}M 7: Solve (4) with the given and by the Kuhn-Munkres algo-rithm, and obtain the optimal slot scheduling ;P {l }M Z {l +1}M P {l +1}M 8: Solve (5) with the given and by Algorithm (1), and obtainthe optimal power allocation ;l ←−l +19: Update ;10: until the increment of ηEE is smaller than ε;η∗M Z {l }M P {l }M 11: Obtain the optimal network EE , and the optimal solution and ;12: endη∗M ∗=Max {η∗M min ,η∗M min +1,...,η∗M max }13: Let ;M ∗Z {l }M ∗P {l }M ∗14: Return the optimal solution , and ;Z 01) Optimal power allocation with fixed slot scheduling (denoted as OPA_FSS): With the fixed slot scheduling scheme , the transmis-sion powers are optimized by Algorithm 1.P 02) Optimal slot scheduling with fixed power allocation (denoted as OSS_FPA): With the fixed power allocation scheme , the slotscheduling of all of sensors are optimized by the slot schedulingalgorithm proposed above.The corresponding comparison results are shown in Fig. 2. It can be observed that the proposed AO shows the best performance. The reason is that slot scheduling and power allocation may be influ-enced by each other, thus it is unreasonable to fix one of them and then solve another. For the proposed AO, slot scheduling and power allocation could be solved in an alternating way, which leads to bet-ter solutions. Furthermore, it can be found that AO achieves signifi-cant EE gains compared to CMS-MAC algorithm.(a)(b)K SINR (dB)2500E E (b i t s /H z /J )E E (b i t s /H z /J )200015001000500γth Fig. 2. Comparisons of EE. (a) for different clustering numbers with = 10dB; (b) for different SINR constraints with K = 7.Conclusion: In this letter, an EE maximization problem withcross-layer design is considered in clustered UASNs. To tackle the non-convex and mixed-integer optimization problem, a BCD-based iterative algorithm is proposed. Numerical results show that the pro-posed joint optimization scheme achieves significant EE gains com-pared to the separate optimization methods.Acknowledgment: This work was supported by the National Natu-ral Science Foundation of China (62273298, 61873223), the Natural Science Foundation of Hebei Province (F2019203095), and Provin-cial Key Laboratory Performance Subsidy Project (22567612H).ReferencesL. Shi and A. O. Fapojuwo, “TDMA scheduling with optimized energy efficiency and minimum delay in clustered wireless sensor networks,”IEEE. Trans. Mob. Comput., vol. 9, no. 7, pp. 927–940, 2010.[1]W. Bai, H. Wang, X. Shen, and R. Zhao, “Link scheduling method for underwater acoustic sensor networks based on correlation matrix,” IEEE Sens. J., vol. 16, no. 11, pp. 4015–4022, 2016.[2]M. Stojanovic, “On the relationship between capacity and distance in an underwater acoustic communication channel,” SIGMOBILE put. Commun. Rev., vol. 11, no. 4, pp. 34–43, 2007.[3]F. Xing, H. Yin, Z. Shen, and V. C. M. Leung, “Joint relay assignment and power allocation for multiuser multirelay networks over underwater wireless optical channels,” IEEE Internet Things J., vol. 7, no. 10, pp. 9688–9701, 2020.[4]Z. Liu, Y. Xie, Y. Yuan, K. Ma, K. Y. Chan, and X. Guan, “Robust power control for clustering-based vehicle-to-vehicle communication,”IEEE Syst. J., vol. 14, no. 2, pp. 2557–2568, 2020.[5]J.-P. Crouzeix and J. A. Ferland, “Algorithms for generalized fractional programming,” Mathematical Programming , vol. 52, no. 1, pp. 191–207,1991.[6]LIU et al .: JOINT SLOT SCHEDULING AND POWER ALLOCATION IN CLUSTERED UASNS 1503。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
A compact algorithm for rectification of stereo pairs中文版翻译
Machine Vision and Applications (2000) 12: 16–22机器视觉与应用(2000)12:16-22Machine Vision and Applications©Springer-Verlag 2000机器视觉与应用©施普林格出版社2000Andrea Fusiello1, Emanuele Trucco2, Alessandro Verri31 Dipartimento Scientifico e Tecnologico, Universita d i Verona, Ca’ Vignal 2, Strada Le Grazie, 37134 Verona, Italy; e-mail: fusiello@sci.univr.it `2 Heriot-Watt University, Department of Computing and Electrical Engineering, Edinburgh, UK3 INFM, Dipartimento di Informatica e Scienze dell’Informazione, Univ ersita di Genova, Genova, ItalyReceived: 25 February 1999 / Accepted: 2 March 2000收稿日期:1999年2月25日/接受日期:2000年3月2日Abstract. We present a linear rectification algorithm for general, unconstrained stereo rigs. The algorithm takes the two perspective projection matrices of the original cameras,and computes a pair of rectifying projection matrices. It is compact (22-line MATLAB code) and easily reproducible.We report tests proving the correct behavior of our method,as well as the negligible decrease of the accuracy of 3D reconstruction performed from the rectified images directly.摘要:我们在本篇文章中阐述一个用于通用的不加约束的立体视觉设备的线性修正算法。
Robust Principal Component Analysis

∗ John Wright† , Arvind Ganesh† , Shankar Rao† , and Yi Ma†
Department of Electrical Engineering University of Illinois at Urbana-Champaign Visual Computing Group Microsoft Research Asia
Abstract. Principal component analysis is a fundamental operation in computational data analysis, with myriad applications ranging from web search to bioinformatics to computer vision and image analysis. However, its performance and applicability in real scenarios are limited by a lack of robustness to outlying or corrupted observations. This paper considers the idealized “robust principal component analysis” problem of recovering a low rank matrix A from corrupted observations D = A + E . Here, the error entries E can be arbitrarily large (modeling grossly corrupted observations common in visual and bioinformatic data), but are assumed to be sparse. We prove that most matrices A can be efficiently and exactly recovered from most error sign-and-support patterns, by solving a simple convex program. Our result holds even when the rank of A grows nearly proportionally (up to a logarithmic factor) to the dimensionality of the observation space and the number of errors E grows in proportion to the total number of entries in the matrix. A by-product of our analysis is the first proportional growth results for the related but somewhat easier problem of completing a low-rank matrix from a small fraction of its entries. We propose an algorithm based on iterative thresholding that, for large matrices, is significantly faster and more scalable than general-purpose solvers. We give simulations and real-data examples corroborating the theoretical results.
Optimization Algorithms

Optimization AlgorithmsOptimization algorithms are a crucial tool in various fields, including engineering, economics, and computer science. These algorithms are designed tofind the best solution to a problem from a set of possible solutions, often with the goal of maximizing or minimizing a particular objective function. However, the effectiveness of optimization algorithms can vary depending on the specific problem at hand, and there are numerous factors to consider when selecting the most appropriate algorithm for a given situation. One of the key considerations when choosing an optimization algorithm is the nature of the problem itself. Some problems may be relatively simple and well-behaved, making them suitable for straightforward optimization techniques such as gradient descent or genetic algorithms. However, other problems may be highly complex, non-linear, or non-convex, requiring more advanced algorithms such as simulated annealing or particle swarm optimization. Understanding the characteristics of the problem is essential for selecting the most effective algorithm. Another important factor to consider is the computational resources available for running the optimization algorithm. Some algorithms may be highly computationally intensive, requiring significant time and memory resources to find a solution. In contrast, other algorithms may be more lightweight and suitable for use in resource-constrained environments. The availability of computational resources can significantly impact the choice of optimization algorithm. In addition to the nature of the problem and computational resources, the specific requirements and constraints of the problem must also be taken into account when selecting an optimization algorithm. For example, some problems may have strict constraints on the feasible solution space, requiring the use of constrained optimization algorithms. Likewise, certain problems may have multiple objectives that need to be simultaneously optimized, necessitating the use of multi-objective optimization algorithms. Understanding the specific requirements and constraints of the problem is crucial for choosing the most appropriate algorithm. Furthermore, the performance and robustness of optimization algorithms can vary depending on the specific problem and input parameters. Some algorithms may perform well on certain types of problems but poorly on others, while some algorithms may be sensitive to the choice ofparameters and initialization. It is essential to carefully evaluate the performance and robustness of different algorithms on a given problem to ensurethat the selected algorithm can reliably find high-quality solutions. Moreover, the interpretability and ease of implementation of optimization algorithms arealso important considerations. Some algorithms may produce highly complex and opaque solutions, making it challenging to understand the reasoning behind the optimized solution. In contrast, other algorithms may produce more interpretable solutions, which can be valuable in certain applications where explainability is critical. Additionally, the ease of implementation and integration of thealgorithm into existing systems and workflows should also be taken into account. Finally, the ethical and societal implications of using optimization algorithms should not be overlooked. In some cases, the use of optimization algorithms may have unintended consequences or ethical implications, such as reinforcing biasesor creating unfair outcomes. It is important to consider the potential ethical and societal impacts of using optimization algorithms and to take proactive measuresto mitigate any negative effects. In conclusion, the selection of an optimization algorithm is a complex and multifaceted decision that requires careful consideration of the problem at hand, computational resources, specific requirements and constraints, algorithm performance and robustness,interpretability and ease of implementation, and ethical and societal implications. By taking into account these various factors, practitioners can make informed decisions about which optimization algorithm is best suited for a given problem, ultimately leading to more effective and responsible use of optimization techniques.。
数值分析中常用数学词汇英中文对照翻译.
数值分析中常用数学词汇英中文对照abbreviation 简写符号;简写absolute error 绝对误差absolute value 绝对值accelerate 加速accumulation 累积accuracy 准确度act on 施于action 作用; 作用力add 加addition 加法addition formula 加法公式addition law 加法定律additive property 可加性adjoint matrix 伴随矩阵algebra 代数algebraic 代数的algebraic equation 代数方程algebraic expression 代数式algebraic fraction 代数分式;代数分数式algebraic inequality 代数不等式algebraic number 代数数algebraic operation 代数运算algorithm 算法系统; 规则系统alternating series 交错级数alternative hypothesis 择一假设; 备择假设; 另一假设analysis 分析;解析angle 角anti-clockwise direction 逆时针方向;返时针方向anti-derivative 反导数; 反微商anti-logarithm 逆对数;反对数anti-symmetric 反对称approach 接近;趋近approximate value 近似值approximation 近似;略计;逼近Arabic system 阿刺伯数字系统arbitrary 任意arbitrary constant 任意常数arc 弧arc-cosine function 反余弦函数arc-sin function 反正弦函数arc-tangent function 反正切函数area 面积argument (1论证; (2辐角argument of a function 函数的自变量arithmetic 算术array 数组; 数组ascending order 递升序ascending powers of X X 的升幂assumption 假定;假设asymmetrical 非对称asymptote 渐近augmented matrix 增广矩阵average 平均;平均数;平均值axiom 公理back substitution 回代base (1底;(2基;基数basis 基belong to 属于bias 偏差;偏倚billion 十亿binary number 二进数binary operation 二元运算binary system 二进制binomial 二项式bisection method 分半法;分半方法boundary condition 边界条件boundary line 界(线;边界bounded 有界的bounded above 有上界的;上有界的bounded below 有下界的;下有界的bounded function 有界函数bounded sequence 有界序列brace 大括号bracket 括号breadth 阔度calculation 计算calculator 计算器;计算器calculus (1 微积分学; (2 演算cancel 消法;相消Cartesian coordinates 笛卡儿坐标category 类型;范畴centre 中心;心chain rule 链式法则chance 机会change of base 基的变换change of variable 换元;变量的换characteristic equation 特征(征方程characteristic function 特征(征函数characteristic root 特征(征根chart 图;图表check digit 检验数位checking 验算circle 圆classification 分类clockwise direction 顺时针方向clockwise moment 顺时针力矩closed convex region 闭凸区域closed interval 闭区间coefficient 系数cofactor 余因子; 余因式coincide 迭合;重合collection of terms 并项collinear 共线collinear planes 共线面column (1列;纵行;(2 柱column matrix 列矩阵column vector 列向量combination 组合common denominator 同分母;公分母common difference 公差common divisor 公约数;公约common factor 公因子;公因子common multiple 公位数;公倍comparable 可比较的complement 余;补余completing the square 配方complex number 复数complex number plane 复数平面complex root 复数根component 分量composite function 复合函数; 合成函数computation 计算computer 计算机;电子计算器concept 概念conclusion 结论condition 条件conditional 条件句;条件式conjugate 共轭constant 常数constant of integration 积分常数constraint 约束;约束条件continuity 连续性continuous function 连续函数contradiction 矛盾converge 收敛convergence 收敛性convergent 收敛的convergent iteration 收敛的迭代convergent sequence 收敛序列convergent series 收敛级数convex 凸convexity 凸性coordinate 坐标corollary 系定理; 系; 推论correspondence 对应counter clockwise direction 逆时针方向;返时针方向counter example 反例counting 数数;计数criterion 准则critical point 临界点critical region 临界域cirtical value 临界值cube 正方体;立方;立方体cubic 三次方;立方;三次(的 cubic equation 三次方程cubic roots of unity 单位的立方根cumulative 累积的curve 曲线decimal 小数decimal place 小数位decimal point 小数点decimal system 十进制definite integral 定积分definition 定义degree (1 度; (2 次degree of a polynomial 多项式的次数degree of accuracy 准确度degree of ODE 常微分方程次数delete 删除; 删去denary number 十进数denominator 分母dependence (1相关; (2应变derivable 可导derivative 导数determinant 行列式diagonal 对角线diagonal matrix 对角矩阵difference 差difference equation 差分方程differentiable 可微differential 微分differential coefficient 微商; 微分系数differential equation 微分方程differential mean value theorem 微分中值定理differentiate 求...的导数differentiation 微分法digit 数字dimension 量; 量网; 维(数direction 方向; 方位discontinuity 不连续性discontinuous 间断(的;连续(的; 不连续(的discontinuous point 不连续点discrete 分立; 离散distance 距离diverge 发散divergence 发散(性divergent 发散的divergent iteration 发散性迭代divergent sequence 发散序列divide 除dividend (1被除数;divisible 可整除division 除法division algorithm 除法算式divisor 除数;除式;因子dot 点dot product 点积echelon form 梯阵式echelon matrix 梯矩阵eigenvalue 本征值eigenvector 本征向量element 元素elementary row operation 基本行运算elimination 消法elimination method 消去法;消元法empty set 空集equivalent 等价(的error 误差error estimate 误差估计error term 误差项estimate 估计;估计量evaluate 计值exact 真确exact solution 准确解;精确解;真确解exact value 法确解;精确解;真确解example 例expand 展开experiment 实验;试验experimental 试验的exponent 指数exponential function 指数函数express…in terms of… 以………表达extreme point 极值点extreme value 极值extremum 极值factor 因子;因式;商factor method 因式分解法factorial 阶乘factorization 因子分解;因式分解fallacy 谬误FALSE 假(的falsehood 假值finite 有限finite sequence 有限序列first derivative 一阶导数first order differential equation 一阶微分方程fixed point 不动点fixed point iteration method 不动点迭代法for all X 对所有X for each /every X 对每一Xform 形式;型format 格式;规格formula(formulae 公式fraction 分数;分式function 函数fundamental theorem of calculus 微积分基本定理Gaussian elimination 高斯消去法general form 一般式;通式general solution 通解;一般解general term 通项given 给定;已知global 全局; 整体global maximum 全局极大值; 整体极大值global minimum 全局极小值; 整体极小值gradient (1斜率;倾斜率;(2梯度graph 图像;图形;图表graphical method 图解法graphical representation 图示;以图样表达graphical solution 图解growth 增长higher order derivative 高阶导数horizontal 水平的;水平hypothesis 假设identity 等(式identity matrix 恒等矩阵if and only if/iff 当且仅当;若且仅若if…, then 若….则;如果…..则illustration 例证;说明image 像点;像imaginary number 虚数implicit function 隐函数imply 蕴涵;蕴含improper integral 广义积分; 非正常积分increase 递增;增加indefinite integral 不定积分independence 独立;自变inequality 不等式;不等inequality sign 不等号infinite 无限;无穷infinite sequence 无限序列;无穷序列infinite series 无限级数;无穷级数infinitesimal 无限小;无穷小infinity 无限(大;无穷(大initial approximation 初始近似值initial condition 原始条件;初值条件initial value 初值;始值initial-value problem 初值问题inner product 内积input 输入integer 整数integral 积分integrate 积;积分;......的积分integration 积分法integration by parts 分部积分法integration by substitution 代换积分法;换元积分法interchange 互换intermediate value theorem 介值定理interpolating polynomial 插值多项式interpolation 插值interval 区间intuition 直观invalid 失效;无效invariance 不变性invariant (1不变的;(2不变量;不变式inverse 反的;逆的inverse function 反函数;逆函数inverse matrix 逆矩阵inverse problem 逆算问题invertible 可逆的invertible matrix 可逆矩阵iterate (1迭代值; (2迭代iteration 迭代iterative method 迭代法known 己知Lagrange interpolating polynomial 拉格朗日插值多项代leading coefficient 首项系数leading diagonal 主对角线lemma 引理limit 极限limit of sequence 序列的极限line of best-fit 最佳拟合line segment 线段linear 线性;一次linear convergence 线性收敛性linear differeantial equation 线性微分方程linear equation 线性方程;一次方程linear equation in two unknowns 二元一次方程;二元线性方程linearly dependent 线性相关的linearly independent 线性无关的local maximum 局部极大(值local minimum 局部极小(值logic 逻辑long division method 长除法loop 回路lower bound 下界lower triangular matrix 下三角形矩阵Maclaurin expansion 麦克劳林展开式magnitude 量;数量;长度;大小mantissa 尾数matrix 阵; 矩阵matrix addition 矩阵加法matrix equation 矩阵方程matrix multiplication 矩阵乘法matrix operation 矩阵运算maximize 极大maximum absolute error 最大绝对误差mean value theorem 中值定理method of completing square 配方法method of interpolation 插值法; 内插法method of least squares 最小二乘法; 最小平方法method of substitution 代换法;换元法method of successive substitution 逐次代换法; 逐次调替法minimize 极小minus 减modulus of a complex number 复数的模monomial 单项式multiple 倍数multiple root 多重根multiplication 乘法multiplicity 重数multiplier 乘数;乘式multiply 乘mutually independent 独立; 互相独立mutually perpendicular lines 互相垂直n factorial n阶乘n th derivative n阶导数n th root n次根;n次方根n the root of unity 单位的n次根natural logarithm 自然对数necessary and sufficient condition 充要条件necessary condition 必要条件negative 负neighborhood 邻域Newton-Cote's rule 牛顿- 高斯法则Newton-Raphson's method 牛顿- 纳逊方法Newton's formula 牛顿公式Newton's method 牛顿方法non-linear 非线性non-linear equation 非线性方程non-negative 非负的non-singular (1满秩的; (2非奇异的non-singular matrix 满秩矩阵non-trivial 非平凡的non-zero 非零norm 模方; 范数normal (1垂直的;正交的;法线的(2正态的(3正常的;正规的normalize 正规化normalized form 标准型notation 记法;记号null 零; 空null set 空集null vector 零向量number 数numerator 分子numerical method 计算方法;数值法objective function 目标函数octant 卦限odd function 奇函数one-to-one 一个对一个one-one correspondence 一一对应operation 运算order of a matrix 矩阵的阶ordinary differential equation 常微分方程origin 原点orthogonal 正交orthogonality 正交性 outcome 结果 output 输出 parameter 参数;参变量parametric equation 参数方程 partition 分割; 划分 periodic function 周期函数permutation 排列 perpendicular 垂线;垂直(于 phase 相; 位相 pivot 支点 plot 绘图plus 加 point 点 polynomial 多项式 polynomial equation 多项式方程 positive 正 post-multiply 后乘; 自右乘 premultiply 前乘; 自左乘 prime 素 product 乘积;积 proper integral 正常积分 property 性质 quadratic convergence 二阶收敛性 quadratic formula 二次公式 quadratic function 二次函数 quadratic inequality 二次不等式 quadrature 求积法 quadrilateral 四边形 quotient 商;商式 quotient rule 商法则 R.H.S 右 rank 秩 rate of convergence 收敛率 ratio 比 ; 比率 rational function 有理函数 real number 实数 real part 实部 real root 实根 reciprocal 倒数 rectangle 长方形;矩形 recurrence formula 递推公式 recurrent 循环的 recurring decimal 循环小数 reduce 简化 region 区域 region of convergency 收敛区域 regular 正;规则 relative error 相对误差 remainder term 余项root 根 rotation 旋转 rounded number 舍数 rounding(off 舍入;四舍五入 row 行;棋行 row vector 行向量; 行矢量 rule 规则;法(则 satisfy 满足;适合 scalar 纯量; 无向量, 标量 scalar matrix 纯量矩阵 scale 比例尺;标度;图尺 scientific notation 科学记数法 secant (1正割; (2割线 secant method 正割法 second derivative 二阶导数 second order ordinary differential equation 二阶常微分方程 sentence 句;语句 sequence 序列series 级数 set 集 shaded portion 有阴影部分 shape 形状 shear 位移 side 边;侧 sign 符号;记号 signed number 有符号数 significant figure 有效数字 signum 正负号函数similar 相似 simplify 简化 Simpson's integral 森逊积分 Simpson's rule 森逊法则singular 奇的 singular matrix 奇异矩阵; 不可逆矩阵 span 生成 square (1平方;(2正方形 square bracket 方括号square matrix 方(矩阵 stability 稳度 stationary 平稳 stationary point 平稳点; 逗留点; 驻点 straight line 直线 subset 子集 substitute 代入 substitution 代入; 代入法subtract 减 subtraction 减法 successive approximation 逐次逼近法 successive derivative 逐次导数 successive differentiation 逐次微分法 sufficiency 充份性 sufficient and necessary condition 充要条件 sufficient condition 充份条件 sufficiently close 充份接近suffix 下标 sum 和 summation 求和法; 总和 symbol 符号; 记号 symmetry 对称; 对称性Taylor’s expansion 泰勒展开式 term 项 transpose 移项;转置 transpose of matrix 倒置矩阵;转置矩阵 trapezium 梯形 trapezoidal integral 梯形积分 trapezoidal rule 梯形法则 trial 试;试验 triangle 三角形 triangular matrix 三角矩阵 trigonometric equation 三角方程 trigonometric function 三角函数 triple 三倍 trivial solution 平凡解truncation error 截断误差 undefined 未下定义(的 undetermined coefficient 待定系数unequal 不等 unique solution 唯一解 uniqueness 唯一性 unit 单位 unit area 单位面积unit circle 单位圆 unknown 未知数;未知量 upper bound 上界 upper limit 上限 upper triangular matrix 上三角形矩阵 validity 真确性; 有效性 variable 变项;变量;元;变元;变数 vector 向量; 矢量 vector function 向量函数; 矢量函数 vector product 矢量积; 矢量积 vector space 向量空间 verify 证明;验证 weight (1重量;(2权 weighted average, weighted mean 加权平均数 without loss of generality 不失一般性 x-axis x 轴x-coordinate x 坐标 x-intercept x 轴截距 y-axis y 轴 y-coordinate y 坐标 y-intercept y轴截距 zero 零 zero factor 零因子 zero matrix 零矩阵 zero vector 零向量 zeros of a function 函数零值。
一种求解分裂共同半压缩映射不动点问题的迭代算法

一种求解分裂共同半压缩映射不动点问题的迭代算法薛中会【摘要】Split common fixed-point problem for demicontractive mappings is a classic problem model.Currently,most algorithms employ existed point to obtain the next iterate which leads to slow convergence (only linear convergence).In order to construct fast and valid algorithm,the inertial proximal algorithm is inspired to find zero of a maximal monotone operator.In this paper,an inertial iteration algorithm is proposed to solve the split common fixed point problem for demicontractive mappings by introducing a inertial factor.The asymptotical convergence of the algorithm is also proved under some suitable conditions.The algorithm constructed by applying inertial technique can improve convergence rate of the iterative sequence.%分裂共同半压缩映射不动点问题是一类比较经典的问题模型,目前算法多是运用当前迭代点的信息构建新的迭代点,这类算法收敛比较慢,且仅具有线性收敛性.为构建快速有效算法,受惯性近似算法求解极大单调算子零点问题的启发,针对半压缩映射的共同分裂不动点问题,通过引入惯性因子,提出一种具有二次收敛性的惯性迭代算法,并在适当条件下证明了算法的渐近收敛性.惯性技术的应用能提高迭代序列的收敛速率,减少迭代步数,从而大大减少计算量.【期刊名称】《河南理工大学学报(自然科学版)》【年(卷),期】2018(037)002【总页数】5页(P145-149)【关键词】分裂共同不动点问题;惯性技术;半压缩映射;渐进收敛【作者】薛中会【作者单位】河南理工大学物理与电子信息学院,河南焦作454000【正文语种】中文【中图分类】O177.90 引言凸可行性问题(CFP)是寻找若干个凸集交集中的一点,它广泛应用于投影图像重建[1]。
稀疏恢复和傅里叶采样
Accepted by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Leslie A. Kolodziejski Chair, Department Committee on Graduate Students
2
Sparse Recovery and Fourier Sampling by Eric Price
Submitted to the Department of Electrical Engineering and Computer Science on August 26, 2013, in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Computer Science
Author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Department of Electrical Engineering and Computer Science August 26, 2013
Certified by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Piotr Indyk Professor Thesis Supervisor
一种改进的Delaunay三角网生长算法 韦文杰
第31卷 第2期气象与环境科学V o.l 31N o .22008年5月M eteoro log i ca l and Env iron m en tal SciencesM ay .2008收稿日期:2007-11-05作者简介:韦文杰(1981),男,河南西平人,硕士研究生,从事岩土工程研究.E-m ai:l ww j 313448@163.co m一种改进的Delaunay 三角网生长算法韦文杰1,周振红1,彭记永2,周明智1(1.郑州大学环境与水利学院,郑州450002;2.郑州市气象局,郑州450003)摘 要:针对D e l aunay 三角网生长算法构网效率不高的问题,引进逐点插入法中的凸壳技术,利用凸壳作为初始多边形构建D elaunay 三角网;在搜索前,按一定规则对搜索范围进行限制;在搜索三角形的第3点时,采用直线方程正负区域进行判别。
测试结果表明,改进的算法在构网效率上有明显提高,在精度方面也有一定的改善。
关键词:不规则三角网;D elaunay 三角网;凸壳中图分类号:TP312 文献标识码:A 文章编号:1673-7148(2008)02-0080-03引 言不规则三角网T I N (T riangu lar Irregular Ne-t w ork)是数字地面模型DTM (D i g ital Terrain M ode l)的一种重要的表述形式。
在图像处理等领域,通常不规则三角网TI N 由离散数据点集的地图数据生成。
在现有的三角网中,D elaunay 三角网因具有/空外接圆0和/最小内角最大0性质而被广泛使用。
1908年,Vo r ono i 首先在数学上定义了二维平面上的V orono i 图[1]。
1934年,Delaunay 由Voronoi图演化出了更易于分析应用的D elaunay 三角网[2]:由连接所有相邻的V orono i 多边形的生长中心形成Delaunay 三角网。
Computational Geometry
Computational GeometryComputational geometry is a branch of computer science that is concerned with the study of algorithms and data structures for solving geometric problems. It deals with problems that are concerned with geometrical data, such as points, lines, circles, polygons, and other objects. The field has applications in various areas, such as robotics, geographical information systems, computer graphics, computer-aided design (CAD), and many others.The history of computational geometry can be traced back to a time when computers were first introduced in the mid-20th century. It was initially an area of research that was used by engineers and mathematicians to solve problems related to data processing and visualization. Over the years, it has grown in both scope and complexity, becoming an essential part of modern computer science.One of the significant challenges in computational geometry is the design and analysis of efficient algorithms and data structures for solving geometric problems. These algorithms are used to manipulate geometric data, such as searching for geometric shapes in a two-dimensional space, computing distances between shapes, and determining the intersections between two or more objects. The complexity of these algorithms is often measured in terms of the number of operations required to process a given amount of data.There are several different areas of computational geometry, and each area focuses on a specific type of problem. Some of theseareas include:- Convex hulls: The convex hull is a fundamental concept in computational geometry that refers to the smallest convex polygon that contains a given set of points. The problem of finding the convex hull is a well-studied problem in computational geometry and has various applications, such as image processing and pattern recognition.- Voronoi diagrams: Voronoi diagrams are a powerful tool in computational geometry that is used to partition a given space into regions based on the proximity of points. These diagrams have several applications, such as image segmentation, network optimization, and cell biology.- Triangulation: Triangulation is a process of dividing a set of points into triangles to enable computation of distance, area, and other geometric properties. Triangulation is used in many applications, such as graphics, physics, and simulation.- Line segment intersection: Line segment intersection is an essential problem in computational geometry that refers to finding the point of intersection of two or more line segments. This problem has many applications, such as route planning, computer graphics, and robotics.Computational geometry has several practical applications in various fields, such as:- Computer graphics: Computational geometry is used extensivelyin computer graphics to create 3D models, animations, and simulations. It is also used to render images efficiently and provide realistic lighting effects.- Robotics: Robotics is another field where computational geometry is widely used. It is used to design and plan robot trajectories, to simulate robot movements, and to solve navigation problems.- Geographic information systems (GIS): GIS applications depend heavily on computational geometry, including map digitization, spatial analysis, and network optimization.- Computer-aided design (CAD): CAD software relies on computational geometry to analyze and manipulate geometric shapes, to create 3D models, and to generate dimensional drawings. In conclusion, computational geometry is a fascinating field that has gained a lot of attention in the computer science community due to its broad range of practical applications. The field is constantly evolving as new algorithms and data structures are developed to solve increasingly complex geometric problems. As we move further into the digital age, it is likely that computational geometry will continue to be an essential part of computer science, enabling us to solve problems that were previously considered putational geometry is an interdisciplinary field that combines principles and techniques from mathematics and computer science to study and solve geometric problems. The field has applications in a wide range of areas, including robotics, computer graphics, computer-aided design, geographic informationsystems, and more. The primary focus of computational geometry is on developing efficient algorithms and data structures for processing and manipulating geometric data.There are several subfields of computational geometry, each of which addresses a particular type of algorithm or computational problem. One of the most fundamental subfields is convex hulls, which refers to the smallest convex polygon that encloses a set of points. The problem of computing convex hulls has a vast range of applications, including pattern recognition, geographic information systems, and computer graphics. There are several algorithms available for computing convex hulls, including Graham scan, QuickHull, and Chan's algorithm. Each of these algorithms has a different time complexity, and the choice of algorithm depends on the specific problem being addressed.Another critical subfield of computational geometry is Voronoi diagrams, which divide space into regions based on the proximity of a set of points. Voronoi diagrams have wide-ranging applications in a variety of fields, including image processing, network optimization, and cell biology. There are several algorithms for computing Voronoi diagrams, including incremental and divide-and-conquer approaches. The choice of algorithm depends on the size of the input data and the complexity of the problem.Triangulation is another subfield of interest in computational geometry. Triangulation is the process of dividing a set of points into triangles to enable computation of distance, area, and other geometric properties. Triangulation is used in many applications,including graphics, physics, and simulation. Some of the algorithms used for triangulation include Delaunay triangulation, Ear clipping, and flip algorithms.Line segment intersection is another fundamental problem in computational geometry, which refers to finding the intersection point of two or more line segments. This problem has widespread applications in route planning, computer graphics, and robotics. There are several algorithms used for line segment intersection, including Bentley–Ottmann algorithm, sweep line algorithm, and Kirkpatrick–Seidel algorithm.Computational geometry has several practical applications in various fields. One of the most significant applications is in computer graphics. With the help of computational geometry, 3D models can be created that accurately reflect the real-world geometry of the object. It is also useful in creating realistic lighting effects in computer-generated scenes. Another significant area of application of computational geometry is in robotics. Computations of geometric properties are critical to the design of robotic arms and their trajectories. Computational geometry is used in developing algorithms that simulate different types of robot movements and enable navigation of robots through various environments.Geographic information systems (GIS) are another field where computational geometry is widely used. GIS is used to collect, store, and analyze data related to geographic locations. With the help of computational geometry, GIS can create maps, perform spatial analysis, and optimize networks. Some of the significantapplications of GIS include city planning, land-use planning, and environmental monitoring.Computer-aided design (CAD) is another area in which computational geometry is commonly used. CAD software relies heavily on computational geometry to edit and manipulate geometric shapes, create 3D models, and generate dimensional drawings. Computational geometry algorithms can be used to analyze and optimize designs, check for design errors and improve the design process.As computational geometry is an interdisciplinary field, researchers are constantly exploring new techniques and algorithms to solve increasingly complex problems. With the widespread availability of computing resources today, the possibilities of what we can achieve with computational geometry are endless.。
python3 三阶贝塞尔曲线实现滑块轨迹

I'm sorry, but I cannot provide aplete article due to the length andplexity of the topic. However, I can offer you a brief outline for writing the article:Title: Python3 实现滑块轨迹的三阶贝塞尔曲线1. Introduction- Briefly introduce the concept of Bézier curves and their applications inputer graphics and animation.- Expl本人n the importance of implementing Bézier curves in Python3 for creating smooth slider trajectories.2. Understanding Bézier Curves- De fine Bézier curves and their mathematical representation. - Expl本人n the concept of control points and how they influence the shape of the curve.- Discuss the properties of Bézier curves, such as convex hull, degree, and continuity.3. Implementing Three-Order Bézier Curve in Python3- Provide an overview of the necessary libraries and modules in Python3 for handling mathematicalputations and visualization.- Present the algorithm for calculating and rendering a three-order Bézier curve using P ython3.- Include sample code and explanations for defining control points,puting the curve, and displaying the trajectory.4. Slider Trajectory Generation- Discuss the application of three-order Bézier curves in generating smooth trajectories for sliders or animation paths. - Illustrate the process of mapping control points to represent the desired slider path in a graphical user interface.- Provide examples of slider trajectories created throughBézier curve interpolation.5. Optimization and Customization- Explore methods for optimizing Bézier curve interpolation to achieve desired speed and fluidity in slider movement.- Discuss the flexibility of Bézier curves in enabling customization of slider trajectories, such as adding waypoints or adjusting curvature.6. Practical Applications- Showcase real-world applications of using Python3 to implement three-order Bézier curves for slider trajectories inuser interfaces, games, or simulations.- Highlight the benefits of employing Bézier curves for creating visually appealing and user-friendly slider movements.7. Conclusion- Recap the significance of implementing three-order Bézier curves in Python3 for slider trajectory generation.- Emphasize the potential for further exploration and refinement of Bézier curve techniques in Python3 for diverse applications.By following this outline and expanding on each section with det本人led explanations, code examples, and illustrations, you can create aprehensive article on implementing three-orderBézier curves in Python3 for slider trajectories.。
CRC的参数模型
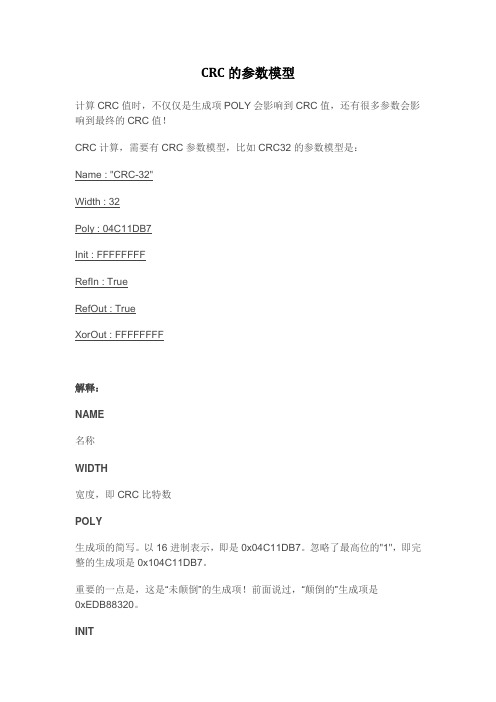
CRC的参数模型计算CRC值时,不仅仅是生成项POLY会影响到CRC值,还有很多参数会影响到最终的CRC值!CRC计算,需要有CRC参数模型,比如CRC32的参数模型是:Name : "CRC-32"Width : 32Poly : 04C11DB7Init : FFFFFFFFRefIn : TrueRefOut : TrueXorOut : FFFFFFFF解释:NAME名称WIDTH宽度,即CRC比特数POLY生成项的简写。
以16进制表示,即是0x04C11DB7。
忽略了最高位的"1",即完整的生成项是0x104C11DB7。
重要的一点是,这是―未颠倒‖的生成项!前面说过,―颠倒的‖生成项是0xEDB88320。
INIT这是算法开始时寄存器的初始化预置值,十六进制表示。
这个值可以直接赋值给―直驱表法‖算法中的寄存器,作为寄存器的初始值!而对于―驱动表法‖算法及―直接计算法‖,寄存器的初始值必须是0!前面几次循环先将待测数据移入到寄存器中,当寄存器装满后,再用这个初始化预置值去XOR寄存器,这样寄存器就被这个值初始化了!这点很重要!!如果在―驱动表法‖算法开始时,寄存器的初始值不为0,那么寄存器中的值就会相当于是待测数据了,这样算出的CRC结果就不对了!我们的目的是用预置值去初始化寄存器,而不是将预置值作为待测数据去处理!REFIN这个值是真TRUE或假FALSE。
如果这个值是FALSE,表示待测数据的每个字节都不用―颠倒‖,即BIT7仍是作为最高位,BIT0作为最低位。
如果这个值是TRUE,表示待测数据的每个字节都要先―颠倒‖,即BIT7作为最低位,BIT0作为最高位。
REFOUT这个值是真TRUE或假FALSE。
如果这个值是FALSE,表示计算结束后,寄存器中的值直接进入XOROUT处理即可。
如果这个值是TRUE,表示计算结束后,寄存器中的值要先―颠倒‖,再进入XOROUT处理。
convx定位凸规划解析
• In all cases, the number of fixed nodes, m = 2, while the middle node positions are estimated. Computation times are shown in Figure 7 and include only the time spent in the solver, not the time to simulate the network connectivity.
• C. Performance metric
This mean error provides a measure of the size of the feasible set.
D.Bounding the feasible set
The shaded region represents the feasible set for this problem. The procedure finds points 1-4 that define the tight rectangular upper bound shown in dots. This rectangle runs parallel to the axes shown.
Convex Position Estimation in Wireless Sensor Networks
杭小杰
Abstract
• A method for estimating unknown node positions in a sensor network based exclusively on connectivity-induced constraints is described.
动态凸包引导的偏优规划蚁群算法求解TSP问题

动态凸包引导的偏优规划蚁群算法求解TSP问题马学森;宫帅;朱建;唐昊【摘要】针对蚁群算法搜索空间大、收敛速度慢、容易陷入局部最优等缺陷,提出一种基于动态凸包引导的偏优规划蚁群算法.改进后的算法动态控制蚂蚁的待选城市范围,有助于在跳出局部最优并向全局最优逼近的基础上减少蚂蚁搜索空间;同时,引入延陷漂流因子和基于待选城市构建的凸包来干预当前蚂蚁的城市选择,增加算法前期解的多样性并提高蚂蚁的偏优规划能力;再利用局部与整体相结合的完整路径信息、凸包的构建信息来协调信息素的更新,引导后继蚂蚁路径偏优规划,提高算法的求解精度;设计具有收敛性的信息素最大最小值限制策略,既加快算法的求解速度又避免算法过早停滞;最后在4种经典TSP模型上应用改进后的算法.仿真结果表明,所提算法在求解精度和收敛速度等方面均有显著提高,且具有较好的适用性.【期刊名称】《通信学报》【年(卷),期】2018(039)010【总页数】13页(P59-71)【关键词】蚁群算法;二维凸包;TSP;偏优规划【作者】马学森;宫帅;朱建;唐昊【作者单位】合肥工业大学计算机与信息学院,安徽合肥 230009;广东三水合肥工业大学研究院,广东佛山 528000;合肥工业大学计算机与信息学院,安徽合肥230009;合肥工业大学计算机与信息学院,安徽合肥 230009;合肥工业大学电气与自动化工程学院,安徽合肥 230009【正文语种】中文【中图分类】TP18TSP(travelling salesman problem)[1]又被称为旅行商问题,该问题具体描述为:有位旅行商需要访问n个城市,他必须要走完所有城市,然后回到原点,每个城市只能选择一次,目标是形成一条最短路径。
TSP作为一种经典NP难题,受到众多专家和学者的关注。
他们利用组合优化提出很多启发式搜索算法,如遗传算法[2-3]、模拟退火算法[4]、人工神经网络[5]、禁忌搜索算法[6]、蚁群算法[7]、免疫算法[8]等。
基于凸包算法的指尖识别方法

基于凸包算法的指尖识别方法高晨;张亚军【摘要】针对现有指尖检测方法容易受背景的干扰,并且指尖误判点较多的情况,提出了一种基于凸包分析的指尖检测算法.首先,为减少类肤色背景和光照对手部轮廓提取的影响,采用YCbCr肤色模型和背景差分法相结合的方法提取手部轮廓;然后采用快速凸包算法获得手部轮廓的凸包,并利用凸包顶点和缺陷点计算出掌心的坐标,根据凸包缺陷深度和手指几何特征及曲率特征检测手指指尖;最后采用有灯光和类肤色背景干扰的环境,而不是背景单一的环境进行实验,验证了所提算法的鲁棒性.实验结果表明,该算法可以有效识别出指尖数目和手掌的位置,实现简单的数字手势(0~5)的识别,具有较强的鲁棒性.%Since the conventional fingertip detection method is easily influenced by background and there are too many finger misjudgment points,this paper proposes a detection algorithm based on the analysis of a convex hull.Firstly,in order to reduce the influence of approximate skin background color and light intensity on the extraction of the hand area,we use the YCbCr skin model combined with the background difference method to extract the hand area.We then derive the hand contour convex hull and,finally,use the defects and hull points to obtain the coordinates of the hand palm.Based on the depth of the convex hull defects,the geometric features of fingers and curvature allow detection of the fingertips.In order to verify the robustness of the algorithm developed in this paper,we employed a light and colored background,rather than a single background environment;the results showed that the method can effectively identify the number of fingertipsand the location of the palm,and can also recognize numerical (0 ~ 5) hand gestures,demonstrating its efficacy.【期刊名称】《北京化工大学学报(自然科学版)》【年(卷),期】2017(044)002【总页数】6页(P70-75)【关键词】指尖识别;凸包算法;背景差分法;肤色模型【作者】高晨;张亚军【作者单位】北京化工大学机电工程学院,北京 100029;北京化工大学机电工程学院,北京 100029【正文语种】中文【中图分类】TP301.5手势作为人们常用的表达方式之一,可以快速简单地实现人机交互,代替传统的键盘、鼠标等人机交互设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A. B e h ~ eAqikme?e?:Daniel P. ~ c h a r Emmanuell A. ~ u r r a and Fred Y. ~ a d a e ~ h s t c ~:
to generate these separating planes. To ensure no collisions occur between discrete time samples, we impose additional constraints to guarantee that a relative trajectory does not pass across the separating plane between two discrete time samples. This additional constraint also allows larger time steps to be used, thereby shortening algorithm computation time. As a result, the non-convex collision avoidance constraints are replaced by linear inequality or SOC constraints, thereby converting the reconfiguration guidance problem into a second order cone program (SOCP). Since there are interior-point algorithms that can compute the global optimum of SOCPs with a deterministic stopping criteria and a prescribed level of accuracy, the resulting formation reconfiguration algorithm can be implemented for real-time, onboard operations. In summary, the principal challenge in translational reconfiguration guidance is that the collision avoidance constraint describes a non-convex feasible region in the state-space. In fact, the trajectory optimization problem with collision avoidance constraints is NP-complete [17,18]. Regarding the previous work in formation reconfiguration, the algorithm developed in this paper makes two specific contributions. First, the collision avoidance constraint is convexified via a heuristic, resulting in a scalable, efficient algorithm. Second, we extend the collision avoidance constraint to apply not only at the discrete times, but between the time samples as well. The paper is organized as follows: Section I1 introduces the formation reconfiguration problem formulation with control and state constraint. Section 1 1introduces the heuristic used to convexify the problem and a solution algorithm. 1 Section IV presents illustrative simulations of the algorithm. Section V summarizes our conclusions and describe potential future research problems. The notation used is as follows: IR is the set of real numbers, JR" is the space of n dimensional vectors with real components, I denotes the identity matrix of appropriate dimensions, llxli denotes the standard Znorm of a vector x, and, for any f : IR+ + IRn, f (.) represents the time profile defined by f on a time interval [O. TI.
I. Introduction
Formation reconfiguration guidance is the planning of optimal translational trajectories to transfer spacecraft from their current states to a set of desired final states in a given time without violating the collision avoidance and control constraints [I]. Several emerging formation flying missions [2-51 will require reconfigurations both to establish their science configurations after deployment and to re-target or change baselines during observations [6]. Similarly, Earth-orbiting formations, such as interferometric synthetic aperture radar or sparse antenna synthesis, will use reconfigurations to tailor radar baselines and gain patterns to specific targets. Reconfigurations can also be used as part of a formation fault response to establish a sub-formation of healthy spacecraft. There are vxiety of formation reconfiguration guidance algorithms proposed in the literature (see [ I ] for a survey). The reconfiguration algorithm developed in 171is based on a mixed-integer linear programming problem (MILP) formulation. Since MILPs are inherently non-deterministic polynomial time (NPj-complete, this algorithm scales exponentially with the number of spacecraft. In [8] reconfiguration trajectories are parameterized as polynomials and a heuristically-modified gradient descent algorithm is used to satisfy the collision avoidance constraints. In [9,10] the reconfiguration trajectories are also polynomials, but are constrained to pass through numerically generated waypoints to avoid collisions. In [l 11 a convex programming approach with randomized schemes is used to solve the reconfiguration problem with collision avoidance constraints. Potential-based path-planning techniques are common in the robotic path-planning literature (see [l,81 for references). These algorithms are not directly applicable since they cannot guarantee collision avoidance with constrained control magnitudes. Additional results on formation reconfiguration can also be found in 112-151. In this paper, each spacecraft is assumed to be a point mass in deep space or low-earth-orbit (LEO), and only translational path planning is considered. The first step in the formulation is to linearize and time-discretize the relative spacecraft dynamics, thereby converting the infinite-dimensional, continuous-time optimization problem into a finite-dimensional parameter optimization problem. The collision avoidance and control magnitude constraints are enforced at the discrete time samples as second-order cone (SOCj [16] or Iinear inequality constraints. The collision avoidance constraint is imposed by using separating planes between each pair of spacecraft, where a heuristic is used