测量平差问题中必要观测数的确定
网平差中确定必要观测数的统一公式

从该网确定不了任何一待定点的绝对高程 , 只能确定点间
的高差 , 即点间相对关系 。此时假设其中一点为已知点 , 然后确定其它四点的高程 , 所以必要观测数为 4。
以上是直观的分析 , 下面总结了适用于水准网确定必
要观测数的式子 , 公式如下 :
t = 1 ×m - 1 - c
(1)
其中 , m 为网中所有点数 (包括已知点和待定点 ) 。
模大且复杂时略显繁琐 , 所以总结了适用于确定测角网必
要观测数的公式 , 式子如下 :
t = 2 ×m - 4 - c
(2)
根据式 (2) 求图 2中各网的必要观测数 。图 2a中 , m
= 6 , μ = 4 , 由于 4个起算数据全是必要的起算数据 , 所
以
μ 1
=4,
得
c
=μ
-
μ 1
=0,
所以该网必要观测数为
则
μ 1
<μ≤ b , c
=μ
-
μ 1
;
④网中总起算数据数大于必要起算数据数 , 即
μ
>
b, 若 μ个起算数据中包含了
b个必要起算数据 ,
则
μ 1
=
b
<μ,
c
=μ -
b
=μ
-
μ 1
;
⑤当 μ > b时 , 若 μ个起算
数据中没有完全包含
b个必要起算数据 ,
则
μ 1
< b <μ,
c
=μ
-
μ 1
。
尽管以上五类情况各不相同 , 其计算多余起算数据数
下必要观测数 t确定的一些公式 。本文则对几种常见控制 网 (水准网 、测角网 、测边网 /边角网和 GPS网 ) 中确定必 要观测数进行分析 , 针对每种网分别总结出一个公式 , 然 后将这四类网的公式进行概括 , 最后得到各类网平差中确 定必要观测数的统一公式 。
误差理论与测量平差四章
引用参数 X=H1
X%
h%1 h%4 h%5 0
h%1 h%2 h%6 0
h%3 h%4 h%6 0
h%1
1 0
1
1
0 0
1 0
X% HA
011 000 110 000
0
0
1
1
0
hh%%12
1
2
x
2 m in
1
nE(
1
2
)
2
n
得证
二、最小二乘原理 1.最小二乘法
例:匀速运动的质点在时刻的位置y表示为:
yˆ ˆ ˆ
实际上: y v ˆ ˆ
为了求ˆ 与
ˆ, 在
1, 2,L
测定其位置,
n
得y1, y2 L yn ,则:
vi ˆ ˆ yi , (i 1, 2L n)
W AL A0
二、附有参数的条件平差函数模型 例 引用参数 X=SAB 参数的个数 U=1 n=5, t=3
r=n-t=5-3=2 条件方程个数:
C=r+U=3 可以列出三个条件方程:
S%12 S%22 X%2 2S%2 X%cos L%1 0 S%12 S%22 X%2 2S%1X%cos L%2 0 S%12 S%22 X%2 2S%1 S%2 X%cos L%3 0
hh%%34
hh%%56
0
0
0 1
X%
0
0
0
H
A
测量平差中关于起算数据确定的一些见解
第 44卷 第 2018年
283期 月
山 西 建 筑
SHANXI ARCHITECTURE
AVuolg..4 42N0o1.823
文章编号:10096825(2018)23021003
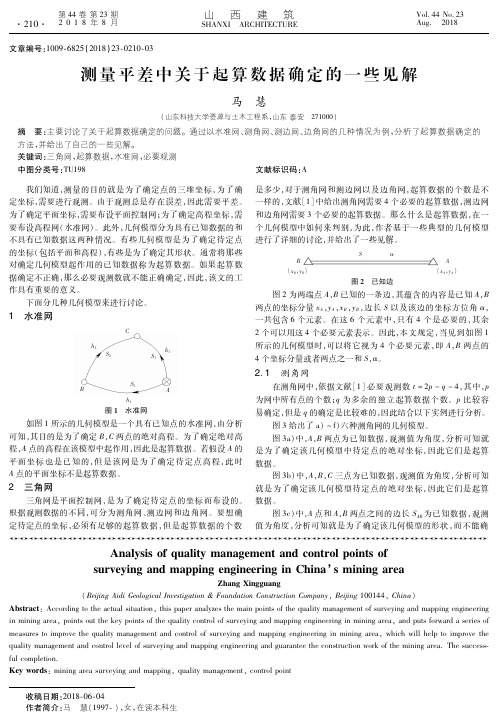
测量平差中关于起算数据确定的一些见解
马 慧
(山东科技大学资源与土木工程系,山东 泰安 271000)
2.1 测角网
在测角网中,依据文献[1]必要观测数 t=2p-q-4,其中,p 为网中所有点的 个 数;q为 多 余 的 独 立 起 算 数 据 个 数。 p比 较 容 易确定,但是 q的确定是比较难的,因此结合以下实例进行分析。
图 3给出了 a)~f)六种测角网的几何模型。 图 3a)中,A,B两点为已知数据,观测值为角度,分析可知就 是 为 了 确 定 该 几 何 模 型 中 待 定 点 的 绝 对 坐 标,因 此 它 们 是 起 算 数据。 图 3b)中,A,B,C三点为已知数据,观测值为角度,分析可知 就 是 为 了 确 定 该 几 何 模 型 待 定 点 的 绝 对 坐 标,因 此 它 们 是 起 算 数据。 图 3c)中,A点和 A,B两点之间的边长 SAB为已知数据,观测 值 为 角 度 ,分 析 可 知 就 是 为 了 确 定 该 几 何 模 型 的 形 状 ,而 不 能 确
摘 要:主要讨论了关于起算数据确定的问题。通过以水准网、测角网、测边网、边角网的几种情况为例,分析了起算数据确定的
方法,并给出了自己的一些见解。
关键词:三角网,起算数据,水准网,必要观测
中图分类号:TU198
文献标识码:A
我们知道,测量的目的就是为了确定点的三维坐标,为了确 是多少,对于测角网和测边网以及边角网,起算数据的个数是不
测量平差问题中必要观测数的确定

n=15 t=3p-3=9
n=33 t=3p-3-3=15
1 3
2
P3
S0 为已知边, P1 , P2 ,P3 , P4 , P5 , P6 为待定点, ∠1~ ∠16 为观测角。 n=16 t = 2 p - 4 = 2 ×6 - 4 = 8
(2)当存在多余起算数据时
t=2p-4-q
A , B , C 为已知点, P1 ,P2 , P3 为 待定点, ∠1~ ∠12 为观测角。
n=12; t=2p-4-2=6。
~ 为已知方位角,P1 , P2 , P3 , P4 , P5 为待定点, ~ 2 1 ∠1~ ∠13 为观测角。
n=13; t=2p-4-1=5。
~ 为已知方位角, P1 , P2 , P3 , P4 , A , B 为已知点, 0 P5 , P6 为待定点, ∠1~∠21 为观测角。
n=5 t=2p-3-q=2×4-5=3
P1 , P2 , P3 , P4 , P5 , P6为待定点, S1~ S3 为观测边。
t = 2 p - 3= 2 ×6 - 3 = 9。
GPS网
a=3,b=3。
(1)当起算数据<=必要起算数据,且无多余起算 数据时 t=3p-3 (2)当存在多余起算数据时 t=3p-3-q
必要观测
为了确定观测对象的位置或形状、大小所必须的 最少观测数,称为必要观测。在测量中必要观测 是指为确定模型中所有待定点值(高程值或坐标 值)所需要的最少观测数。 必要观测数对参数个数的选择、多余观测数的确 定具有重要的意义。
必要观测数的确定
观测值个数:n; 必要观测数:t; 多余观测数:r; 所有点个数:p; 多余的起算数据:q; 确定每一个待定点值所需观测数:a; 必要起算数据个数(必要的起算基准):b。
测量平差问题中必要观测数的确定

A ,B 为已知点, 为已~知0 方位角, P1 , P2 为待定点, S1~ S5 为观测边。
n=5
t=2p-3-q=2×4-5=3
P1 , P2 , P3 , P4 , P5 , P6为待定点, S1~ S3 为观测边。 t = 2 p - 3= 2 ×6 - 3 = 9。
GPS网
a = 3, b = 3 。
必要观测
为了确定观测对象的位置或形状、大小所必须的最少观测数,称 为必要观测。在测量中必要观测是指为确定模型中所有待定点值 (高程值或坐标值)所需要的最少观测数。
必要观测数对参数个数的选择、多余观测数的确定具有重要的意义 。
必要观测数的确定
观测值个数:n; 必要观测数:t; 多余观测数:r; 所有点个数:p; 多余的起算数据:q; 确定每一个待定点值所需观测数:a; 必要起算数据个数(必要的起算基准):b。
A , B 为已知点, 为已~知0 方位角, P1 , P2 , P3 , P4 , P5 , P6 为待定点, ∠1~∠21 为观测角。
n=21
t = 2 p - 4-1 = 2 ×7 - 5 = 9
边角网/测边网
a=2;b=3
(1)当起算数据<=必要起算数据,且无多余起算数据时
t=2p-3
(2)当存在多余起算数据时 t=2p-3-q
测量平差问题中必要观测数的确定
基本概念
必要元素
起算数据 必要观测
必要元素
能够唯一确定一个几何模型所必要的元素
起算数据
必要的起算数据
பைடு நூலகம்
水准网
1
测角网
4
测边网/边角网
3
GPS网
3
说明
必要观测个数

由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
1.网中有2个或2个以上已知点的情况三角网中有2个或2 个以上已知三角点,就一定具备了4个必要起算数据。
无论是测角网、测边网还是边角同测网,如果有2个已知点相邻,要确定一个未知点的坐标,需要观测两个观测值(2个角,或者1条边和1个角,或者2条边)。
也就是说,确定1个未知点要有2个必要观测值;那么如果网中有p个未知点,必要观测数应等于未知点个数的两倍。
t = 2 ·p(3-4-1)(1) 测角网图3-9所示,三角网中有2个已知点,待定点个数为p =6。
如果三角网中观测量全部是角度时。
总观测值个数:n = 23必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 11(2) 测边网在图3-9中,如果三角网中观测量全部是边的长度时:总观测值个数:n = 14必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 2(3) 边角同测网在图3-9中,如果三角网中的所有的角度值和所有的边长值都进行观测时:总观测值个数:n = 37必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 252. 网中已知点少于2个的情况有些情况下,三角网中已知点可能少于2个,只有1个已知点、1个已知边和1个已知方位角,或者没有已知点和已知方位角只有1个已知边。
但是,不管怎样说,1条已知边是必须已知的,或者需要进行观测的。
如果没有已知点,可以假定网中的1个未知点;如果没有已知方位角,可以取网中的1个方向的方位角为某一假定值。
这样也就间接地等价于网中有2个相邻点的坐标是已知的。
(1) 测角网三角网中共有p个三角点、1个已知方位角(也可以没有)、1个已知点(也可以没有已知点)和1个已知边长S(或者也是观测得到的),并观测了所有的角度。
测量平差资料

测量平差资料第⼀章绪论⼀、观测误差1、为什么要进⾏观测必要观测、多余观测2、误差存在的现象3、误差产⽣的原因观测条件:观测仪器、观测者、外界条件4、误差的分类粗差、系统误差、偶然误差5、误差的处理办法⼆、测量平差的简史和发展三、测量平差的两⼤任务及本课程的主要内容第⼆章误差分布与精度指标⼀、偶然误差的规律性1、随机变量2、偶然误差的分布正态分布3、偶然误差的统计特性由统计分析可以看出,偶然误差具有下列特性:1、在⼀定的观测条件下,偶然误差的绝对值有⼀定的限值,即超过⼀定限值的偶然误差出现的概率为零;2、绝对值较⼩的偶然误差⽐绝对值较⼤的偶然误差出现的概率⼤;3、绝对值相等的正负偶然误差出现的概率相同;4、偶然误差的理论平均值为零⼆、随机变量的数字特征(1)反映随机变量集中位置的数字特征---数学期望(2)反映随机变量偏离集中位置的离散程度----⽅差(3)映两两随机变量x、y相关程度的数字特征---协⽅差3、协⽅差(a) 定义相关系数三、衡量精度的指标1、⽅差和中误差2、平均误差3、或然误差4、极限误差5、相对(中、真、极限)误差四、随机向量的数字特征1、随机向量2、随机向量的数学期望3、随机向量的⽅差-协⽅差阵协⽅差阵的定义协⽅差阵的特点4、互协⽅差阵协⽅差阵的定义协⽅差阵的特点五、精度准确度精确度观测值的质量取决于观测误差(偶然误差、系统误差、粗差)的⼤⼩。
1、精度:描述偶然误差,可从分布曲线的陡峭程度看出精度的⾼低。
2、准确度:描述系统误差和粗差,可⽤观测值的真值与观测值的数学期望之差来描述,即:3、精确度:描述偶然误差、系统误差和粗差的集成,精确度可⽤观测值的均⽅误差来描述,即:即观测值中只存在偶然误差时,均⽅误差就等于⽅差,此时精确度就是精度。
七、⼩结第三章协⽅差传播律⼏个概念1、直接观测量2、⾮直接观测量---观测值的函数⽔准测量导线测量三⾓形内⾓平差值3、独⽴观测值4、⾮独⽴观测值----相关观测值独⽴观测值各个函数之间不⼀定独⽴5、误差传播律6、协⽅差传播律⼀、观测值线性函数的⽅差设观测向量L及其期望和⽅差为:若观测向量的多个线性函数为三、两个函数的互协⽅差阵四、⾮线性函数的情况五、多个观测向量⾮线性函数的⽅差—协⽅差矩阵设观测向量的t个⾮线性函数为:对上式求全微分,得六、协⽅差传播律的应⽤1、⽔准测量的精度2、距离丈量的精度3、同精度独⽴观测值算术平均值的精度七、应⽤协⽅差传播律时应注意的问题(1)根据测量实际,正确地列出函数式;(2)全微分所列函数式,并⽤观测值计算偏导数值;(3)计算时注意各项的单位要统⼀;(4)将微分关系写成矩阵形式;(5)直接应⽤协⽅差传播律,得出所求问题的⽅差-协⽅差矩阵。
测量平差备考复习资料

一、 正误判断(正确“T ”,错误“F ”每题1分,共10 分)。
1.已知两段距离的长度及中误差分别为128.286m ±4.5cm 与218.268m ±4.5cm ,则其真误差与精度均相同( )。
2.如果X 与Y 的协方差0xy σ=,则其不相关( )。
3.水准测量中,按公式i icp s =(i s 为水准路线长)来定权,要求每公里高差精度相同( )。
4.可用误差椭圆来确定待定点与待定点之间的某些精度指标( )。
5.在某一平差问题中,观测数为n ,必要观测数为t ,参数个数u <t 且不独立,则该平差问题可采用附有参数的条件平差的函数模型。
( )。
6.由于同一平差问题采用不同的平差方法得到的结果不同,因此为了得到最佳平差结果,必须谨慎选择平差方法( )。
7.根据公式()222220cos sin 0360E F θσθθθ=+≤≤得到的曲线就是误差椭圆( )。
8.对于特定的平面控制网,如果按间接平差法解算,则误差方程的个数是一定的( )。
9.对于同一个观测值来说,若选定一定权常数0σ,则权愈小,其方差愈小,其精度愈高( )。
10.设观测值向量,1n L 彼此不独立,其权为()1,2,,i P i n =,12(,,,)n Z f L L L =,则有22211221111Z n nf f f P L P L P L P ⎛⎫⎛⎫⎛⎫∂∂∂=+++ ⎪ ⎪ ⎪∂∂∂⎝⎭⎝⎭⎝⎭( )。
二、填空题(每空2分,共24分)。
1、设对某三角网进行同精度观测,得三角形角度闭合差分别为:3秒,-3秒,2秒,4秒,-2秒,-1秒,0秒,-4秒,3秒,-2秒,则测角中误差为 秒。
2、某平差问题函数模型)(I Q =为⎪⎪⎩⎪⎪⎨⎧=-=--=+-+=--0ˆ03060515443121x v v v v v v v v ,则该函数模型为 平差方法的模型;=n ,=t ,=r ,=c ,=u 。
《测量平差基础理论》
间接平差函数模型
在实际计算中可以把观测量或待定量设为参数X 选定t个相互独立参数
L ~ F(X ~)
n1
t1
n L ~ 1n B t tX ~ 1d3
设 : X ~ X ~ 参 1X ~ 2X ~ 3 T 数 H ~ B H ~ C H ~ D T
h ~ 1 X ~ 1
H A
h ~ 2 X ~ 2 H A
h ~ 3 X ~ 2 X ~ 3
h ~ 4
X ~ 3 H A
h ~ 5 X ~ 1 X ~ 2
h ~ 6 X ~ 1 X ~ 3
间接平差函数模型
方程个数n<n+t未知数个数
(观测值改正数n;参数改正数t)
L ~ B X ~
必要观测数:确定某个模型所必需的最少的 观测值的个数,称为必要观测数。
必要观测数用符号t表示。
必要观测数的性质
必要元素 外部配置
必要观测
平差问题存在的条件
总观测数用n表示: 当n<t时:
模型不能确定 当n=t时:
模型能唯一确定 当n>t时:
可以确定多个模型 平差问题存在的条件是:n>t
n1 nt t1
d0
n1
Ln 1n B t(Xot~ x 1 )d n 0 1 B~xl
n1 nt t1 n1
lBX od0L
谢谢大家!
2007-5-8
12
必要元素数的性质
必要元素的个数T只取决于模型本身 所有的必要元素都是彼此函数独立的量 模型中所有的量都是必要元素的函数 一个模型中函数独立的量最多只有T个 模型中作为必要元素的“量”不是唯一
的
必要观测数的定义
外部配置:用于推算其它元素的平差前后不 发生改变的元素。
测量平差

条件方程(一)、水准网1、水准网的分类及水准网的基准分为有已知点和无已知点两类。
要确定各点的高程,需要1个高程基准。
2.水准网中必要观测数t的确定有已知点:t等于待定点个数无已知点:t等于总点数减一3、水准网中条件方程的列立方法列条件方程的原则:1、足数; 2、独立;3、最简(1)、先列附合条件,再列闭合条件(2)、附合条件按测段少的路线列立,附合条件的个数等于已知点的个数减一(3)、闭合条件按小环列立(保证最简),一个水准网中有多少个小环,就列多少个闭合条件在水准网条件平差中,按以上方法列条件方程,一定能满足所列条件方程足数、独立、最简原则。
边角网条件方程单一附合导线的条件方程一个方位角条件两个坐标条件纵坐标条件为所以纵坐标条件方程为:纵坐标条件方程的最终形式为:GPS基线向量网三维无约束条件平差1.GPS基线向量网的观测值2、GPS基线向量网三维无约束平差的基准及必要观测数t3、GPS基线向量网三维无约束平差的条件方程的列立GIS数字化数据采集中,折角均为90°的N边形的条件方程直角条件:小结:一、条件平差及其目的二、条件平差的原理三、总结了条件平差的步骤(1)根据具体问题列条件方程式;(2)组成法方程式,(3)解法方程;(4)计算改正数V,(5)求观测值的平差值(6)检核(7)精度评定附有参数的条件平差小结1、为了某种需要,选择参数;2、每选一个参数,就增加一个条件方程,选择u 个参数,就增加u 个条件方程;3、条件方程的总数c=r+u ;4、单位权中误差的计算公式不变;5、求平差值函数的中误差时,应将平差值函数分别对观测值的平差值和参数求偏导数。
间接平差三、选取参数的个数和原则1、所选取t个待估参数必须相互独立;2、所选取t个待估参数与观测值的函数关系容易写出来。
四、不同情况下的误差方程1、水准网误差方程2、方位角误差方程测方位坐标平差函数模型测角网函数模型3、测边网误差方程4、GPS网误差方程。
测量平差中条件方程类型确定的分析

测量平差中条件方程类型确定的分析作者:泥立丽王永来源:《商情》2020年第33期【摘要】给出了测量平差问题中各类条件方程的确定方法。
在测角三角网的平差中,正确无误地确定各类条件方程是一个难点问题。
文中通过精选的四个测角三角网,从如何确定几何模型的类型、如何确定布网的目的、如何确定起算数据以及如何确定必要观测数等几个方面,分步骤地进行了详细的分析,并给出了思路。
文中给出的方法,简单易行,不容易出错,适合于大多数的初学者和普通测量工作者。
【关键词】几何模型;起算数据;必要观测数;条件方程在测量平差的教学工作中,对于一个几何模型,当确定了必要观测数后,就可以确定多余观测数并依此列出各种条件方程了。
条件方程的类型非常多,包括图形条件、圆周条件、极条件以及坐标方位角条件等。
如何正确地列出相应的条件方程是学生学习的一个难点,本文中,作者结合教学的实际精选了四个测角三角网,并给出了一些分析思路。
1 算例如图1至图4所示,为四个测角三角网,求下列各测角三角网按条件平差时条件方程的总数及各类条件的个数,其中Pi为待定点,i为已知边,i为已知方位角,i取非负整数。
2 分析思路2.1大体分析思路(1)确定几何模型的类型即根据三角网的观测值来确定它是测角三角网、测边三角网还是边角网。
如图1至图4均为测角三角网。
(2)确定布设三角网的目的即布设三角网是为了确定网的形状还是待定点的坐标。
如图1中,其已知数据包括两个已知点坐标、一个已知方位角,可知该网是为了确定待定点的坐标;图2中,没有已知点,但包括两条已知边长,因此该网是为了确定形状和大小,由于大小固定的网是形状不变时的一种特例,因此该网的最终目的是为了确定形状。
图3中,没有已知点,仅包括一条已知边长和两个坐标方位角,因此该网是为了确定形状。
图4中,包括3个已知点,因此该网最终目的是为了确定待定点的坐标。
(3)判断已知数据是否为起算数据已知数据未必是起算数据。
在观测网中,为了实现布网的最终目的,已知数据是否起作用需要进行判断。
论测量平差中必要观测数的确定

控 制 测 量 的 目 的 ,就 是 要 确 定 控 制 网 中 未 知 点的坐标或(和)高 程 。为 此 ,控制网必须具有一 定 种 类 及 数 量 的 起 算 数 据 ,以 便 确 定 控 制 点 在 坐 标系统或高程系统中的位置。各种控制网的必 要起算数据如表1。
表 1 控制网必要起算数据的个数和种类
第一种情况:起 算 数 据 只 含 点 位 起 算 数 据 ,
不 含 非 点 位 起 算 数 据 。 由 前 述 讨 论 可 知 ,此时的
必要 观 测 数 〖 完全由未知点个数确定。显 然 ,于
水 准 网 的 必 要 观 测 数 〖 就 是 未 知 点 (高 程 )的个
数 ;而平面控制网的必要观测数就是未知点坐标
和 控 制 网中 未知 点数 有关 外 ,还 与 起 算 数 据 及 其 种 类 有 关 。本 文 通 过 分 析 必 要 观 测 与 各 类 起 算 数 据 之 间 的 内
在 联 系 ,给出了确定必要观测数的一种新方法,并 列 举 了 不 同 种 类 的 控制网实例验证了该方法的正确性。与已有 方法相比,新方法推导思路简洁,容 易理解,且计算公式简单、便于记忆和使用,对测量平差教学有一定的帮助。
第 32卷 第 1 期
付 新 启 :论 测 量 平 差 中 必 要 观 测 数 的 确 定
41
据 。满足要求后的起算数据可分为两类:一类是
点位起算数据,如坐标、高 程 等 ;另一类是非点位
起算数据,常 见 为 方 位 角 、边 长 等 ,也可以是高
差 。下面就起算数据的这两种情况来分别讨论
必要观测数〖 的计算方法。
[ 关 键 词 ] 控 制 网 ;测 量 平 差 ;必 要 观 测 ;必要起算数据
确定观测次数的方法

确定观测次数的方法
确定观测次数的方法有以下几种:
1. d2值法:通过计算d2值来确定观测次数,d2值是指观测数据与预测数据之间的差异的平方和与观测次数的比值,当d2值小于某个阈值时,可以认为观测数据与预测数据之间差异较小,观测次数可以减少。
2. 秒表计时法:通过使用秒表或其他计时工具,记录完成某项任务所需的时间,然后根据任务的重要性和紧急性来确定观测次数。
3. 通过作业周期确定观测次数法:根据作业的周期来确定观测次数,例如,如果作业周期为2小时,则每小时观测一次。
4. 误差界限法:根据误差界限来确定观测次数,误差界限是指观测数据与预测数据之间的最大允许误差范围,当观测数据与预测数据之间的差异超过误差界限时,需要增加观测次数。
这些方法可以帮助您确定合适的观测次数,以获得准确的结果。
测量平差中必要观测数的确立

测量平差中必要观测数的确立摘要:测量平差中,为确定必要观测数,针对常见的四类控制网分别列出公式,最后作了归纳。
关键词:平差;必要观测;控制网Abstract:surveying adjustment, in order to determine the necessary number of observations, formulas for four kinds of common control networks are listed and summarized.Adjustment:necessary observation; control network.1引言测量平差是依据某种最优化准则,由一系列带有观测误差的测量数据,求定未知量的最佳估值及精度的理论和方法。
平差的函数模型有四类:条件平差模型、附有参数的条件平差函数模型、间接平差和附有限制条件的间接平差。
其中,除条件平差没设定参数外,其它模型均设定了参数,参数的个数与必要观测具有特定的关系,本文针对不同观测条件、不同图形条件下必要观测数的确定讨论一些公式。
2多余观测数的计算及必要观测数下面是对涉及的几个相关概念、文中的一些符号规定以及多余起算数据的计算问题做的说明和简析[1-5]。
必要观测元素和必要观测数:能够唯一确定一个几何模型所必要的元素,称为必要元素。
必要元素的个数称为必要观测个数或必要观测数,用t表示。
多余观测元素和多余观测数:从总观测元素中去掉必要观测元素后,剩下的观测元素称为多余观测元素或多余观测数据。
多余观测元素的个数,称为多余观测数,用r表示,且r=n-t。
N:为待定点个数。
n:所有测点观测数据的总数,包括已知点和待定点。
图中未知点符号:用圆圈o表示。
图中已知点符号:用⊕或△表示。
位置基准:包含任意一点的坐标x0,y0。
方位基准:包含任意一条边的方位角α0。
长度基准:包含任意一条边的变长s0。
3 必要观测数的确定3.1 水准网中必要观测数的确立水准网分为有已知点和无已知点两类,要确定各点的高程,需要1个高程基准。
测量平差问题中必要观测数的确定

图 9 图 10
要额外假定 3 个起算数据 (1 个点的坐标和 1 个方 位角) ,属表中的 B 21 情形 ,必要观测数为 t = 2 p - 3 = 2 ×6 - 3 = 9 。
从以上示例分析可知 ,本文根据实际教学的经 验 ,总结出测量平差问题中不同观测条件 、不同图形 条件下的必要观测数确定的通用公式具有普遍适用 性 ,图表简洁清晰 。这对于更好地掌握测量平差的 基本理论和方法 ,正确应用平差模型具有很好的价 值 ,可以推广应用 。
推算定位 ,可以确保运动轨迹的完整性 。 5. GPSΠINS 惯性组合导航系统虽然精度高 ,但
由于价格昂贵而难以普及 ,而 GPSΠDR 组合系统中 可采用低成本的陀螺仪 ,一个在 1 000 元左右 ,里程 计可采用车辆自带车速传感器 ,所以 GPSΠDR 组合 系统具有成本低 、体积小的特点[1] , 容易大批量装 备。
参考文献 :
[1 ] 董绪荣. 一种低成本 GPS 组合导航定位系统 [J ] . 指挥 技术学院学报 ,2000 , (10) :728.
[2 ] 张相芬 ,袁 信. 自适应卡尔曼滤波在组合导航中的应 用[J ] . 舰船导航 ,2003 , (3) :34235.
(上接第 15 页) 已知方位角 , P1 , P2 为待定点 , S1 ~ S5 为观测边 。
必要观测数确定(平差讲课用)

测量平差中必要观测数的确定方法一、控制网必要起算数据概述1.控制网必要起算数据的要求:见下表。
控制网种类必要起算数据个数必要起算数据种类水准网测角网测边网/边角网/导线网143一点高程两点坐标或一点坐标、一边长和一边方位角一点坐标和一边方位角2.平差计算时控制网的起算数据必须满足要求也就是说,确定必要观测数t时,控制网的起算数据一定已经满足了要求。
满足要求的起算数据不仅种类满足要求,且其个数一定等于或大于其必要起算数据的个数。
起算数据满足要求有两种情况:一是控制网的起算数据本身就满足要求;另一是控制网的起算数据本身不满足要求,经假定或实测补足后满足要求。
补充的起算数据也视为已知。
二、控制网必要观测数的计算方法起算数据可分为两类:一类是点位起算数据,如坐标、高程等;另一类是非点位起算数据,常见为平面控制网中的方位角、边长等。
水准网中无此类起算数据。
下面分别就这两种情况来讨论必要观测数t的确定。
1.起算数据只含点位起算数据,不含非点位起算数据。
显然,水准网的必要观测数t就是此类未知点(高程)的个数;而平面控制网的必要观测数就是此类未知点坐标的个数,也即为点数的2倍。
若以P表示控制网中未知点的个数,则此种情况下必要观测数t的计算方法为水准网:t=P平面控制网:t=2P2.起算数据既含有点位起算数据,又包含非点位起算数据。
包含非点位起算数据只有平面控制网。
这类数据都对应着一条边——有两个端点。
根据该边与控制网的连接情况,非点位起算数据又分为两类:一类是两端点都包含在控制网内部,如图5中的S0、α1、α2,图7中的α0,图9中的α1等,称为第一类非点位起算数据。
另一类是一端与控制网相连,一端自由,该边好像悬挂于控制网上,一般为已知方位角,如图6中的α0,图9中的αA、αB、αC等,称为第二类非点位起算数据或悬挂边。
如果假设非点位起算数据未知,也即网中只有点位起算数据。
则可看出:第一类非点位起算数据与确定未知点坐标有关:确定未知点坐标需要测定方位角、距离。
测量平差的数学模型
本节重点:(1)测量平差的函数模型定义,类型;测量平差的数学模型包括:条件平差法模型、间接平差法模型、附有参数的条件平差法模型、附有限制条件的间接平差法模型、综合平差模型;(2)测量平差的随机模型。
本节教学思路:首先说明平差的数学模型分两类:函数模型与随机模型,进而分别阐述其定义、分类及建立的方法和模型的具体形态。
教学内容:一、平差模型的定义与分类1 •从模型的性质分:函数模型、随机模型,函数模型连同随机模型称平差的数学模型;2 •函数模型又分为:条件平差法模型、间接平差法模型、附有参数的条件平差法模型、附有限制条件的间接平差法模型、综合平差模型;二、各类函数模型的建立(一)概述1 •函数模型定义:在科学技术领域,通常对研究对象进行抽象概括,用数学关系式来描述它的某种特征或内在的联系,这种数学关系式就称为函数模型。
2.函数模型的意义与特点函数模型是描述观测量与待求量之间的数学函数关系的模型。
对于一个平差问题,建立函数模型是测量平差中最基本、最重要的问题,模型的建立方法不同,与之相应就产生了不同的平差方法。
函数模型有线性与非线性之分,测量平差通常是基于线性函数模型,当函数模型为非线性时(如(2-1-4 )式),总是要将其线性化。
(二)各种经典平差方法及其线性函数模型的建立方法。
1.条件平差法及其函数模型首先通过两个例子,来说明条件平差函数模型的建立方法。
A图2-2在图2-1中,观测了三个内角,n=3, t=2,贝U r=n-1=1,存在一个函数关系式(条件方程),可以表示为:L i L2 L3 -180 = 0令A13=[1 1 1]3 1 =[ L1 L2 L3 ] TA O=[-18O]则上式为AL A0 ~ 0(2-2-1 )再如图2-2水准网,D为已知高程水准点,A、B、C均为待定点,观测值向量的真值为〜〜[h i6 1 1〜〜〜〜〜h2 h3 h4 h5 h6 ]其中n=6,t=3,则r=n-t=3,应列出3个线性无关的条件方程,它们可以是:F i(~) * -h2 -~4 =0F2(~)-~3 E = 0F3(~)=~ _忘 _~6 =0AL =0(2-2-2 )般而言,如果有 n 个观测值Ll ,必要观测个数为t ,则应列出r=n-t 个条件方程,(2-2-3)如果条件方程为线性形式,则可以直接写为A ~ A 0 = 0r ::n n 1 r 1 r 〉」1将[二L •厶代入(2-2-4 )式,并令(2-2-4)则(2-2-4 )式为W - -(AL A o )(2-2-5)(2-2-6)(2-2-4 )或(2-2-6 )式即为条件平差的函数模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
YAO Yi2bin , QIU Wei2ning
摘要 :根据课堂教学的经验 ,总结出测量平差问题中不同观测条件 、不同图形条件下的必要观测值数量确定的通用公式 。 关键词 :测量平差 ;必要观测 ;多余观测
图 3 图 4
图 7 图 8
示例 9 如图 9 所示 , A , B 为已知点 , α~ 0 为
(下转第 18 页)
1 8 测 绘 通 报 2007 年 第 3 期
1. 当测量型 GPS 接收机无法接收信号而导航 GPS 能够工作时 , GPSΠDR 导航比单独 GPS 导航精度 明显提高 。本工程中 ,每天都有几条道路需要用导 航数据补充差分数据 ,因此采用 GPSΠDR 组合导航 系统对提高成果整体精度有重要意义 。
示例 4 如图 4 所示 , A 为已知点 , P1 , P2 , P3 , P4 为待定点 , ∠1~ ∠12 为观测角 。
分析 :示例 4 为一测角网 ,包含 2 个起算数据 ( A 的坐标) ,起算数据不够 ,属表中的 J 21 情形 ,必 要观测数 t = 2 p - 4 = 2 ×5 - 4 = 6。
分析 :示例 5 为一测角网 ,包含 6 个起算数据 (A , B , C 的坐标) ,有多余起算数据 ,属表中的 J 22 情形 ,必要观测数 t = 2 p - Q = 2 ×6 - 6 = 6 。
示例 6 如图 6 所示 , α~ 1 , α~ 2 为已知方位角 , P1 , P2 , P3 , P4 , P5 为待定点 , ∠1~ ∠13 为观测角 。
分析 :示例 6 为一测角网 ,包含 2 个起算数据 ( α~ 1 , α~ 2 ) ,虽然起算数据个数不够 ,但仍然有多余 起算数据 ( α~ 1 , α~ 2 中只有 1 个是必要起算数据) , 属表中的 J 22 情形 ,此时需要额外假定 3 个起算数 据 (1 个点的坐标和 1 条边长) ,这样 ,全部起算数据 数 Q = 5 ,必要观测数为 t = 2 p - Q = 2 ×5 - 5 = 5 。
表 3 中 , p 为总点数 , q 为多余起算数据数 , Q 为全部起算数据数 。
下面通过几个示例对上述通用公式进行说明 。 示例 1 如图 1 所示 , P1 , P2 , P3 , P4 为待定点 , h1 ~ h6 为观测高差 。 分析 :示例 1 为一水准网 ,没有起算数据 ,需假 定某点的高程为已知 ,属表中的 S21 情形 ,必要观测 数为 t = p - 1 = 4 - 1 = 3 。 示例 2 如图 2 所示 , A , B , C 为已知水准点 , P1 , P2 , P3 为待定点 , h1 ~ h6 为观测高差 。 分析 :示例 2 为一水准网 ,包含 3 个起算数据 , 属表中的 S22 情形 ,必要观测数应该等于待定点数 ,
表3
水准网
起算数据情况
没有 已 知 水 准 点 或 只 有 1 个已知水准点 多于 1 个已知水准点
必要观测数 t 情形 t= p- 1 S- 1
t= p- 1- q 或 t= p- Q
测角网
测边网 Π边角网
没有 起 算 数 据 或 必 要 起算 数 据 不 够 或 起 算 数据刚好足够 多于必要起算数据
收稿日期 : 2006204211 作者简介 : 姚宜斌 (19762) ,湖北宜都人 ,博士 ,副教授 ,主要从事高精度 GPS 数据分析理论和方法研究 。
2007 年 第 3 期 测 绘 通 报 1 5
即 t = p - Q =6 - 3 =3。
推算定位 ,可以确保运动轨迹的完整性 。 5. GPSΠINS 惯性组合导航系统虽然精度高 ,但
由于价格昂贵而难以普及 ,而 GPSΠDR 组合系统中 可采用低成本的陀螺仪 ,一个在 1 000 元左右 ,里程 计可采用车辆自带车速传感器 ,所以 GPSΠDR 组合 系统具有成本低 、体积小的特点[1] , 容易大批量装 备。
图 1 图 2
示例 3 如图 3 所示 , A , B 为已知点 , P1 , P2 , P3 为待定点 , ∠1~ ∠13 为观测角 。
分析 :示例 3 为一测角网 ,包含 4 个起算数据 ( A , B 的坐标) ,属表中的 J 21 情形 ,必要观测数为 t = 2 p - 4 = 2 ×5 - 4 = 6。
示例 8 如图 8 所示 , A , B 为已知点 , α~ 0 为已 知方位角 , P1 , P2 , P3 , P4 , P5 , P6 为待定点 , ∠1~ ∠21 为观测角 。
分析 :示例 8 为一测角网 ,包含 5 个起算数据 ( A , B 的坐标和α~ 0 ) ,有多余起算数据 ,属表中的J 22 情形 ,必要观测数为 t = 2 p - Q = 2 ×7 - 5 = 9 。
参考文献 :
[1 ] 董绪荣. 一种低成本 GPS 组合导航定位系统 [J ] . 指挥 技术学院学报 ,2000 , (10) :728.
[2 ] 张相芬 ,袁 信. 自适应卡尔曼滤波在组合导航中的应 用[J ] . 舰船导航 ,2003 , (3) :34235.
(上接第 15 页) 已知方位角 , P1 , P2 为待定点 , S1 ~ S5 为观测边 。
2. 对于大型桥梁 、堤坝等附属物位置的记录 , 在工程实施中主要依靠导航时间来决定 ,通过记录 的时间在差分数据中寻找匹配的位置 ,并计算其长 度 ,实际上大型桥梁 、堤坝等附属物的长度计算精度 很差 ,例如对于 30 多米的桥梁 ,长度计算成果与用 皮尺丈量相比可相差 5 m 左右 ,精度相当差 ,实践中 需要人工用测距仪或皮尺测量 。所以对于桥梁等相 对位置要求精确的附属物 , GPSΠDR 组合系统可以发 挥 DR 系统相对位置精度高的优势 ,可大大加快工 作速度 。
参考文献 :
[1 ] 武汉大学测绘学院测量平差学科组. 误差理论与测量 平差基础[M] . 武汉 :武汉大学出版社 ,2003.
表1
附有参数 条件平差 的条件 间接平差平差附有限制 条源自的间 接平差观测数n
必要观测数 t
多余观测数 r = n - t
所设参数数 0
方程数 待求量数
方程形式
r n
AΔ+ W =0
n t r= n- t 0< u< t 且独立 r+ u n+ u
n
n
t
t
r= n- t
u= t 且独立
r= n- t u > t 且包含 t 个独立数
1 4 测 绘 通 报 2007 年 第 3 期
文章编号 :049420911 (2007) 0320014202
中图分类号 :P207. 2 文献标识码 :B
测量平差问题中必要观测数的确定
姚宜斌 , 邱卫宁
(武汉大学 测绘学院 卫星应用工程研究所 ,湖北 武汉 430079)
图 9 图 10
要额外假定 3 个起算数据 (1 个点的坐标和 1 个方 位角) ,属表中的 B 21 情形 ,必要观测数为 t = 2 p - 3 = 2 ×6 - 3 = 9 。
从以上示例分析可知 ,本文根据实际教学的经 验 ,总结出测量平差问题中不同观测条件 、不同图形 条件下的必要观测数确定的通用公式具有普遍适用 性 ,图表简洁清晰 。这对于更好地掌握测量平差的 基本理论和方法 ,正确应用平差模型具有很好的价 值 ,可以推广应用 。
为了保证 观 测 结 果 的 可 靠 性 必 须 进 行 多 余 观 测 。由于观测误差的存在 ,使得观测值之间存在差 异 ,平差的目的就是“消除差异”,求出被观测量的最 可靠结果 。如果不存在多余观测 ,则没必要进行测 量平差 。因此 ,平差问题存在的前提条件是有多余 观测 。
测量平差中常用的函数模型包括条件平差模 型 、附有参数的条件平差 、间接平差模型和附有限制 条件的间接平差模型 ,对于不同的平差模型 ,有不同 的观测数 ,如表 1 所示 。
r+ u= n r+ u= n+ s
n+ u
n+ u
Δ = BX AΔ + BX + Δ = BX - l
-l
W = 0 CX + WX = 0
表 1 中的符号含义与文献[ 1 ] 相同 。由表 1 可 知 ,必要观测数 t 是一个非常重要的量 ,其对参数个 数的选择 、多余观测数的确定具有重要的意义。依 据所选择的参数的独立参数与必要观测数 t 的对应 关系 ,可界定所用的平差模型 。
对于不同的几何图形 , 其必要的起算数据如 表 2所示 。
表2
水准网
必要的起算数据数 1
说明 水准点高程
测角网
2 点坐标或 1 点坐标 、
4
1 条边长 、1 个方位角
测边网Π边角网
3
1 点坐标 、1 个方位角
在日常的测量数据处理中 ,又包含两种情况 ,一 种是起算数据的个数多于必要的起算数据数 (但所提 供的起算数据包含必要的起算数据 ,即起算基准足 够) ,另外一种情况是起算数据不够 ,这又分两种情 况 :其一是所提供的起算数据个数少于必要的起算数 据数 ;其二是虽然所提供的起算数据个数多于必要的 起算数据数 ,但所提供的起算数据不包含全部的必要 起算数据 ,即起算基准不够。如果起算数据不够 ,在 数据处理过程中 ,需假设部分起算数据。此时 ,对于 必要观测数 t 的判定 ,可按表 3 的通用公式确定。
分析 :示例 9 为一测边网 ,包含 5 个起算数据 ( A , B 的坐标和 α~ 0 ) , 有多余起 算 数 据 , 属 表 中 的 B 22情形 ,必要观测数为 t = 2 p - Q = 2 ×4 - 5 = 3 。
示例 10 如图 10 所示 , P1 , P2 , P3 , P4 , P5 , P6 为待定点 , S1 ~ S3 为观测边 。