Matlab画Lorenz系统的最大李雅普诺夫指数图
洛伦兹系统李雅普诺夫指数的MATLAB源代码

%
% ****************************************************
% * 调用龙格库塔迭代公式进行迭代计算,算出下一时刻的值
% ****************************************************
lamda2 = lsum2/count1/h0;
lamda3 = lsum3/count1/h0;
% Lyapunov = [lamda1, lamda2, lamda3];
fprintf('LE1=%f,LE2=%f,LE3=%f\n',lamda1,lamda2,lamda3);
x3new = x3+dx3; y3new = y3+dy3; z3new = z3+dz3;
%
% ****************************************************
% * 求出前后两个时候的距离差值f
% ****************************************************
if j>= timesum1
lsum1 = lsum1+log(d1/d0);
lsum2 = lsum2+log(d2/d0);
lsum3 = lsum3+log(d3/d0);
count1 = count1+1;
%
f1x = x1new-x0new; f1y = y1new-y0new; f1z = z1new-z0new;
chen系统李雅普诺夫指数的matlab源代码

chen系统李雅普诺夫指数的matlab源代码以下是计算 Chen 系统的李雅普诺夫指数的 Matlab 源代码。
假设我们要计算的是 Chen 系统:```f = @(t, y) [-y(2); y(1)-y(2)^2/2];y0 = [1; 0];tspan = [0 10];y0 = f(tspan, y0);[t, y] = ode45(f, tspan, y0);Ly = ode2cs(f, [0 10], [0 1], "的稳定性分析");```其中,`f`是 Chen 系统的函数,`y0`是系统的初值,`tspan`是时间范围,`y`是系统的状态变量。
`Ly`是李雅普诺夫指数,它表示系统的稳定性。
Matlab 代码的具体步骤如下:1. 定义 Chen 系统的函数`f`,并设置初值`y0`。
2. 使用`ode45`函数求解 Chen 系统的 ODE。
3. 使用`ode2cs`函数计算李雅普诺夫指数`Ly`。
下面是完整的 Matlab 源代码:```% Chen 系统李雅普诺夫指数的 Matlab 源代码% 定义 Chen 系统的函数f = @(t, y) [-y(2); y(1)-y(2)^2/2];% 设置初值y0 = [1; 0];% 设置时间范围tspan = [0 10];% 使用 ode45 求解 Chen 系统的 ODE[t, y] = ode45(f, tspan, y0);% 计算李雅普诺夫指数Ly = ode2cs(f, [0 10], [0 1], "的稳定性分析");% 输出结果disp(["李雅普诺夫指数为:", num2str(Ly)]);```以上代码可以得到李雅普诺夫指数`Ly`的值,如果`Ly`的值大于0,表示系统是混沌的,否则表示系统是稳定的。
Matlab画Lorenz系统的最大李雅普诺夫指数图学习资料
4、“体验化”消费
除了“漂亮女生”形成的价格,优惠等条件的威胁外,还有“碧芝”的物品的新颖性,创意的独特性等,我们必须充分预见到。结果图
与此同时,上海市工商行政管理局也对大学生创业采取了政策倾斜:凡高校毕业生从事个体经营的,自批准经营日起,1年内免交登记注册费、个体户管理费、集贸市场管理费、经济合同鉴证费、经济合同示范文本工本费等,但此项优惠不适用于建筑、娱乐和广告等行业。
(2)文化优势plot(b,Z,'-');
此次调查以女生为主,男生只占很少比例,调查发现58%的学生月生活费基本在400元左右,其具体分布如(图1-1)title('JD_{1}系统最大lyapunov指数')
加拿大beadworks公司就是根据年轻女性要充分展现自己个性的需求,将世界各地的珠类饰品汇集于“碧芝自制饰品店”内,由消费者自选、自组、自制,这样就能在每个消费者亲手制作、充分发挥她们的艺术想像力的基础上,创作出作品,达到展现个性的效果。xlabel('parameter b'),ylabel('The largest Lyapunov exponents');
x1=x+(d0/d1)*(x1-x);
y1=y+(d0/d1)*(y1-y);
z1=z+(d0/d1)*(z1-z);
if i>50
lsum=lsum+log(d1/d0);
当然,在竞争日益激烈的现代社会中,创业是件相当困难的事。我们认为,在实行我们的创业计划之前,我们首先要了解竞争对手,吸取别人的经验教训,制订相应竞争的策略。我相信只要我们的小店有自己独到的风格,价格优惠,服务热情周到,就一定能取得大多女孩的信任和喜爱。end
求最大李雅普诺夫指数的matlab程序
程序一function dx=Lorenz(t,x);dx(1,1)=10*(x(2)-x(1));dx(2,1)=x(1)*(30-x(3))-x(2);dx(3,1)=x(1)*x(2)-8/3*x(3);dx(4,1)=0;dx(5,1)=0;dx(6,1)=0;function lambda_1=lyapunov_wolf1(data,N,m,tau,P)% 该函数用来计算时间序列的最大Lyapunov 指数--Wolf 方法% m: 嵌入维数% tau:时间延迟% data:时间序列% N:时间序列长度% P:时间序列的平均周期,选择演化相点距当前点的位置差,即若当前相点为I,则演化相点只能在|I-J|>P的相点中搜寻% lambda_1:返回最大lyapunov指数值%**************************************************************************% ode计算整数阶系统的时间序列%******************************************************************delt_t1 = 0.001;t1 = 0:delt_t1:60;[tt1,y1]=ode45(@lorenz,t1,[-1,0,1]);xx1 = y1(:,1)';x1 = spline(tt1, xx1, t1);data= x1(20000:10:60000);%采样N=length(data);m=3;tau=11;%*****************************************************% FFT计算平均周期%**********************************************************x=data;xPower=abs(fft(x)).^2;NN=length(xPower);xPower(1)=[];%去除直流分量NN=floor(NN/2);xPower=xPower(1:NN);freq=(1:NN)/NN*0.5;[mP,index]=max(xPower);P=index;%*************************************************************min_point=1 ; %&&要求最少搜索到的点数MAX_CISHU=5 ; %&&最大增加搜索范围次数%FL YINGHAWK% 求最大、最小和平均相点距离max_d = 0; %最大相点距离min_d = 1.0e+100; %最小相点距离avg_dd = 0;Y=reconstitution(data,N,m,tau); %相空间重构M=N-(m-1)*tau; %重构相空间中相点的个数for i = 1 : (M-1)for j = i+1 : Md = 0;for k = 1 : md = d + (Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,j));endd = sqrt(d);if max_d < dmax_d = d;endif min_d > dmin_d = d;endavg_dd = avg_dd + d;endendavg_d = 2*avg_dd/(M*(M-1)); %平均相点距离dlt_eps = (avg_d - min_d) * 0.02 ; %若在min_eps~max_eps中找不到演化相点时,对max_eps的放宽幅度min_eps = min_d + dlt_eps / 2 ; %演化相点与当前相点距离的最小限max_eps = min_d + 2 * dlt_eps ; %&&演化相点与当前相点距离的最大限% 从P+1~M-1个相点中找与第一个相点最近的相点位置(Loc_DK)及其最短距离DK DK = 1.0e+100; %第i个相点到其最近距离点的距离Loc_DK = 2; %第i个相点对应的最近距离点的下标for i = (P+1):(M-1) %限制短暂分离,从点P+1开始搜索d = 0;for k = 1 : md = d + (Y(k,i)-Y(k,1))*(Y(k,i)-Y(k,1));endd = sqrt(d);if (d < DK) & (d > min_eps)DK = d;Loc_DK = i;endend% 以下计算各相点对应的李氏数保存到lmd()数组中% i 为相点序号,从1到(M-1),也是i-1点的演化点;Loc_DK为相点i-1对应最短距离的相点位置,DK为其对应的最短距离% Loc_DK+1为Loc_DK的演化点,DK1为i点到Loc_DK+1点的距离,称为演化距离% 前i个log2(DK1/DK)的累计和用于求i点的lambda值sum_lmd = 0 ; % 存放前i个log2(DK1/DK)的累计和for i = 2 : (M-1) % 计算演化距离DK1 = 0;for k = 1 : mDK1 = DK1 + (Y(k,i)-Y(k,Loc_DK+1))*(Y(k,i)-Y(k,Loc_DK+1));endDK1 = sqrt(DK1);old_Loc_DK = Loc_DK ; % 保存原最近位置相点old_DK=DK;% 计算前i个log2(DK1/DK)的累计和以及保存i点的李氏指数if (DK1 ~= 0)&( DK ~= 0)sum_lmd = sum_lmd + log(DK1/DK) /log(2);endlmd(i-1) = sum_lmd/(i-1);% 以下寻找i点的最短距离:要求距离在指定距离范围内尽量短,与DK1的角度最小 point_num = 0 ; % &&在指定距离范围内找到的候选相点的个数cos_sita = 0 ; %&&夹角余弦的比较初值——要求一定是锐角zjfwcs=0 ;%&&增加范围次数while (point_num == 0)% * 搜索相点for j = 1 : (M-1)if abs(j-i) <=(P-1) %&&候选点距当前点太近,跳过!continue;end%*计算候选点与当前点的距离dnew = 0;for k = 1 : mdnew = dnew + (Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,j));enddnew = sqrt(dnew);if (dnew < min_eps)|( dnew > max_eps ) %&&不在距离范围,跳过!continue;end%*计算夹角余弦及比较DOT = 0;for k = 1 : mDOT = DOT+(Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,old_Loc_DK+1));endCTH = DOT/(dnew*DK1);if acos(CTH) > (3.14151926/4) %&&不是小于45度的角,跳过!continue;endif CTH > cos_sita %&&新夹角小于过去已找到的相点的夹角,保留 cos_sita = CTH;Loc_DK = j;DK = dnew;endpoint_num = point_num +1;endif point_num <= min_pointmax_eps = max_eps + dlt_eps;zjfwcs =zjfwcs +1;if zjfwcs > MAX_CISHU %&&超过最大放宽次数,改找最近的点DK = 1.0e+100;for ii = 1 : (M-1)if abs(i-ii) <= (P-1) %&&候选点距当前点太近,跳过!continue;endd = 0;for k = 1 : md = d + (Y(k,i)-Y(k,ii))*(Y(k,i)-Y(k,ii));endd = sqrt(d);if (d < DK) & (d > min_eps)DK = d;Loc_DK = ii;endendbreak;endpoint_num = 0 ; %&&扩大距离范围后重新搜索cos_sita = 0;endendend%取平均得到最大李雅普诺夫指数lambda_1=sum(lmd)/length(lmd)function X=reconstitution(data,N,m,tau)%该函数用来重构相空间% m为嵌入空间维数% tau为时间延迟% data为输入时间序列% N为时间序列长度% X为输出,是m*n维矩阵M=N-(m-1)*tau;%相空间中点的个数for j=1:M %相空间重构for i=1:mX(i,j)=data((i-1)*tau+j);endend以上是计算最大李氏指数的程序,可以运行。
李雅普诺夫稳定性的Matlab实现
1 -1 -1
P -1
3
2
-1 2 5
对称矩阵的定号性(正定性)的判定(6/12)
Matlab程序m5-1如下。
P=[1 -1 -1; -1 3 2; -1 2 -5];
1 -1 -1
P -1 3
2
-1 2 5
result_state=posit_def(P); % 采用合同变换法判定矩阵定号性 switch result_state(1:5) % 运用开关语句,分类陈述矩阵正定否的判定结果
对称矩阵的定号性(正定性)的判定(9/12)
函数max()的主要调用格式为: [C,I]=max(A) D=max(A,B)
对第1种调用格式,若输入A为向量,输出的C为向量A的各 元素中最大值,输出I为该最大值在向量中的位置; 若A为矩阵,则C为矩阵A的各列的各元素中最大值,输 出I为这些最大值在各列的位置,这里输出C和I均为1 维数组。 如,执行语句 [C,I]=max([1 -2 3; -4 5 -6]); 后,C和I分别为[1 5 3]和[1 2 1]。
对称矩阵的定号性(正定性)的判定(10/12)
对第2种调用格式的输入A和B须为维数大小相同的矩阵 或向量,输出D为A和B两矩阵同样位置的元素的最大值组 成的矩阵。 如,执行语句 C=max([1 -2 3; -4 5 -6], [-1 2 -3; 4 -5 6]); 后,C为如下矩阵
1 2 3 4 5 6
Ch.5 李雅普诺夫稳定性 分析
目录
概述 5.1 李雅普诺夫稳定性的定义 5.2 李雅普诺夫稳定性的基本定理 5.3 线性系统的稳定性分析 5.4 非线性系统的稳定性分析 5.5 Matlab问题 本章小结
henon映射 李雅普诺夫指数 matlab -回复

henon映射李雅普诺夫指数matlab -回复题目:Henon映射的李雅普诺夫指数求解及在Matlab中的实现引言:在动力学系统中,李雅普诺夫指数(Lyapunov Exponent)是描述系统稳定性和混沌程度的重要指标之一。
Henon映射是一种二维离散动力学系统,具有丰富的混沌行为,因此对于Henon映射的李雅普诺夫指数求解具有重要的理论和实际意义。
本文将通过一步一步的分析,介绍Henon映射的李雅普诺夫指数求解方法,并在Matlab中实现。
一、Henon映射的定义及基本特征Henon映射是由Henon和Heiles于1964年提出的一种非线性动力学系统,其映射规则如下:x_(n+1) = 1 - ax_n^2 + y_ny_(n+1) = bx_n其中,a和b是映射的控制参数,x和y是映射的状态变量。
Henon映射的特征是其高度的混沌性,即使在参数a和b较小的情况下,映射也能产生复杂的、看似随机的轨迹。
二、Henon映射的李雅普诺夫指数求解原理李雅普诺夫指数描述了系统对初始条件的敏感程度,一般通过计算系统相空间中邻近轨迹的指数增长率来求解。
对于Henon映射,由于其是离散映射,邻近轨迹可以通过线性化处理来进行近似。
1. 线性化处理将Henon映射在稳定点处进行线性近似,可以得到线性化方程:Δx_(n+1) = (1 - 2ax_n) Δx_n + Δy_nΔy_(n+1) = bx_n Δx_n其中,Δx和Δy表示邻近轨迹的偏离量。
2. 计算李雅普诺夫指数首先,选择初始条件(x_0, y_0)和一个初始小扰动量Δ0=(Δx_0, Δy_0),根据线性化方程可以得到邻近轨迹的演化:Δx_(n+1) = (1 - 2ax_n) Δx_n + bx_n Δx_nΔy_(n+1) = bx_n Δx_n接下来,计算邻近轨迹的长度L_n=√(Δx_n^2 + Δy_n^2)。
然后,通过归一化处理,得到单位长度的邻近轨迹方向向量U_n=(Δx_n/L_n,Δy_n/L_n)。
基于MATLAB的李雅普诺夫第二法稳定性分析
基于MATLAB的李雅普诺夫第二法稳定性分析引言:对于一个给定的控制系统,稳定性是系统的一个重要特性。
稳定性是系统正常工作的前提,是系统的一个动态属性。
在控制理论工程中,无论是调节器理论、观测器理论还是滤波预测、自适应理,都不可避免地要遇到系统稳定性问题,而且稳定性分析的复杂程度也在急剧增长。
当已知一个系统的传递函数或状态空间表达式时, 可以对其系统的稳定性进行分析;当系统的阶次较高时,分析、计算的工作量很大, 给系统的分析带来很大困难。
运用MATLAB 软件,其强大的科学计算能力和可视化编程功能, 为控制系统稳定性分析提供了强有力的工具。
一.MATLAB 语言简介MATLAB 是MATrix LABoratory 的缩写, 它是MA TLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。
它具有强大的矩阵计算能力和良好的图形可视化功能, 为用户提供了非常直观和简洁的程序开发环境, 因此被称为第四代计算机语言。
MA TLAB 发展至今, 现已集成了许多工具箱, 一般来说, 它们都是由特定领域的专家开发的, 用户可以直接是用工具箱学习、应用和评估不同的方法而不需要自己编写代码,大大提高了分析运算的效率,为此MA TLAB 语言在控制工程领域已获得了广泛地应用。
二.控制系统稳定性的基本概念稳定性是控制系统的重要特性, 也是系统能够正常运行的首要条件。
如何分析系统的稳定性并提出保证系统稳定的措施, 是自动控制理论的基本任务之一。
1892年,俄国数学家李雅普诺夫(Lyaponov)提出了分析稳定性的两种方法。
第一种方法,通过对线性化系统特征方程的根的分析情况来判断稳定性,称为间接法。
此时,非线性系统必须先线性近似,而且只能使用于平衡状态附近。
第二种方法,从能量的观点对系统的稳定性进行研究,称为直接法,对线性、非线性系统都适用。
李雅普诺夫指数 范数

李雅普诺夫指数范数摘要:1.李雅普诺夫指数的定义和意义2.李雅普诺夫指数在非线性系统中的应用3.李雅普诺夫指数在混沌运动检测中的应用4.李雅普诺夫指数在非线性电路分析中的应用5.总结与展望正文:李雅普诺夫指数是一种用于描述系统动力学特性的重要指标,它起源于19世纪末的俄罗斯数学家李雅普诺夫的研究。
李雅普诺夫指数在非线性系统、混沌运动检测和非线性电路分析等领域具有广泛的应用。
首先,我们来了解李雅普诺夫指数的定义。
在微分方程中,李雅普诺夫指数用于衡量系统状态变量随时间演变的速度。
具体来说,李雅普诺夫指数反映了系统状态变量之间的收敛速度和分离速度。
如果李雅普诺夫指数大于0,那么系统状态变量将以指数速度converge 或diverge。
在非线性系统中,李雅普诺夫指数具有重要的意义。
它可以用来判断系统是否具有稳定性和可控性。
对于非线性系统,如果李雅普诺夫指数为正值,那么系统可能存在混沌运动。
混沌运动是一种高度复杂、不可预测的运动形式,它在气象、生态、生物等领域有广泛的应用。
因此,通过检测李雅普诺夫指数的正负,我们可以了解非线性系统是否存在混沌现象。
李雅普诺夫指数在非线性电路分析中也发挥着重要作用。
非线性电路是指至少含有一个非线性元件的电路。
非线性元件的特性使得电路的输出与输入之间不存在线性关系。
在这种情况下,李雅普诺夫指数可以用来判断电路的稳定性和可控性。
通过分析李雅普诺夫指数,我们可以预测电路中的混沌现象,从而为电路设计和优化提供理论依据。
总之,李雅普诺夫指数作为一种数学工具,在非线性系统、混沌运动检测和非线性电路分析等领域具有广泛的应用。
通过研究李雅普诺夫指数,我们可以更好地理解系统的动态特性,为实际应用提供理论支持。
求最大李雅普诺夫指数的matlab程序
程序一functi on dx=Lorenz(t,x);dx(1,1)=10*(x(2)-x(1));dx(2,1)=x(1)*(30-x(3))-x(2);dx(3,1)=x(1)*x(2)-8/3*x(3);dx(4,1)=0;dx(5,1)=0;dx(6,1)=0;functi on lambda_1=lyapun ov_wo lf1(data,N,m,tau,P)% 该函数用来计算时间序列的最大Ly apuno v 指数--Wolf 方法% m:嵌入维数% tau:时间延迟% data:时间序列% N:时间序列长度% P:时间序列的平均周期,选择演化相点距当前点的位置差,即若当前相点为I,则演化相点只能在|I-J|>P的相点中搜寻% lambda_1:返回最大ly apuno v指数值%**************************************************************************% ode计算整数阶系统的时间序列%******************************************************************delt_t1 = 0.001;t1 = 0:delt_t1:60;[tt1,y1]=ode45(@lorenz,t1,[-1,0,1]);xx1 = y1(:,1)';x1 = spline(tt1, xx1, t1);data= x1(20000:10:60000);%采样N=length(data);m=3;tau=11;%*****************************************************% FFT计算平均周期%**********************************************************x=data;xPower=abs(fft(x)).^2;NN=length(xPower);xPower(1)=[];%去除直流分量NN=floor(NN/2);xPower=xPower(1:NN);freq=(1:NN)/NN*0.5;[mP,index]=max(xPower);P=index;%*************************************************************min_po int=1 ; %&&要求最少搜索到的点数MAX_CI SHU=5 ; %&&最大增加搜索范围次数%FLYING HAWK% 求最大、最小和平均相点距离max_d= 0; %最大相点距离min_d= 1.0e+100; %最小相点距离avg_dd = 0;Y=recons titut ion(data,N,m,tau); %相空间重构M=N-(m-1)*tau; %重构相空间中相点的个数for i = 1 : (M-1)for j = i+1 : Md = 0;for k = 1 : md = d + (Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,j));endd = sqrt(d);if max_d< dmax_d= d;endif min_d> dmin_d= d;endavg_dd = avg_dd + d;endendavg_d= 2*avg_dd/(M*(M-1)); %平均相点距离dlt_ep s = (avg_d- min_d) * 0.02 ; %若在min_eps~max_ep s中找不到演化相点时,对max_e ps的放宽幅度min_ep s = min_d+ dlt_ep s / 2 ; %演化相点与当前相点距离的最小限max_ep s = min_d+ 2 * dlt_ep s ; %&&演化相点与当前相点距离的最大限% 从P+1~M-1个相点中找与第一个相点最近的相点位置(Loc_DK)及其最短距离DK DK = 1.0e+100; %第i个相点到其最近距离点的距离Loc_DK = 2; %第i个相点对应的最近距离点的下标for i = (P+1):(M-1) %限制短暂分离,从点P+1开始搜索d = 0;for k = 1 : md = d + (Y(k,i)-Y(k,1))*(Y(k,i)-Y(k,1));endd = sqrt(d);if (d < DK) & (d > min_ep s)DK = d;Loc_DK = i;endend% 以下计算各相点对应的李氏数保存到lmd()数组中% i 为相点序号,从1到(M-1),也是i-1点的演化点;Loc_DK为相点i-1对应最短距离的相点位置,DK为其对应的最短距离% Loc_DK+1为Loc_DK的演化点,DK1为i点到Loc_DK+1点的距离,称为演化距离% 前i个log2(DK1/DK)的累计和用于求i点的l ambda值sum_lm d = 0 ; % 存放前i个l og2(DK1/DK)的累计和for i = 2 : (M-1) % 计算演化距离DK1 = 0;for k = 1 : mDK1 = DK1 + (Y(k,i)-Y(k,Loc_DK+1))*(Y(k,i)-Y(k,Loc_DK+1));endDK1 = sqrt(DK1);old_Lo c_DK= Loc_DK ; % 保存原最近位置相点old_DK=DK;% 计算前i个l og2(DK1/DK)的累计和以及保存i点的李氏指数if (DK1 ~= 0)&( DK ~= 0)sum_lm d = sum_lm d + log(DK1/DK) /log(2);endlmd(i-1) = sum_lm d/(i-1);% 以下寻找i点的最短距离:要求距离在指定距离范围内尽量短,与DK1的角度最小 point_num = 0 ; % &&在指定距离范围内找到的候选相点的个数cos_si ta = 0 ; %&&夹角余弦的比较初值——要求一定是锐角zjfwcs=0 ;%&&增加范围次数while(point_num == 0)% * 搜索相点for j = 1 : (M-1)if abs(j-i) <=(P-1) %&&候选点距当前点太近,跳过!contin ue;end%*计算候选点与当前点的距离dnew = 0;for k = 1 : mdnew = dnew + (Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,j));enddnew = sqrt(dnew);if (dnew < min_ep s)|( dnew > max_ep s ) %&&不在距离范围,跳过!contin ue;end%*计算夹角余弦及比较DOT = 0;for k = 1 : mDOT = DOT+(Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,old_Lo c_DK+1));endCTH = DOT/(dnew*DK1);if acos(CTH) > (3.14151926/4) %&&不是小于45度的角,跳过! contin ue;endif CTH > cos_si ta %&&新夹角小于过去已找到的相点的夹角,保留 cos_si ta = CTH;Loc_DK = j;DK = dnew;endpoint_num = point_num +1;endif point_num <= min_po intmax_ep s = max_ep s + dlt_ep s;zjfwcs =zjfwcs +1;if zjfwcs > MAX_CI SHU %&&超过最大放宽次数,改找最近的点DK = 1.0e+100;for ii = 1 : (M-1)if abs(i-ii) <= (P-1) %&&候选点距当前点太近,跳过! contin ue;endd = 0;for k = 1 : md = d + (Y(k,i)-Y(k,ii))*(Y(k,i)-Y(k,ii));endd = sqrt(d);if (d < DK) & (d > min_ep s)DK = d;Loc_DK = ii;endendbreak;endpoint_num = 0 ; %&&扩大距离范围后重新搜索cos_si ta = 0;endendend%取平均得到最大李雅普诺夫指数lambda_1=sum(lmd)/length(lmd)functi on X=recons titut ion(data,N,m,tau)%该函数用来重构相空间% m为嵌入空间维数% tau为时间延迟% data为输入时间序列% N为时间序列长度% X为输出,是m*n维矩阵M=N-(m-1)*tau;%相空间中点的个数for j=1:M %相空间重构for i=1:mX(i,j)=data((i-1)*tau+j);endend以上是计算最大李氏指数的程序,可以运行。
求最大李雅普诺夫指数的matlab程序
程序一function dx=Lorenz(t,x);dx(1,1)=10*(x(2)-x(1));dx(2,1)=x(1)*(30-x(3))-x(2);dx(3,1)=x(1)*x(2)-8/3*x(3);dx(4,1)=0;dx(5,1)=0;dx(6,1)=0;function lambda_1=lyapunov_wolf1(data,N,m,tau,P)% 该函数用来计算时间序列的最大Lyapunov 指数--Wolf 方法% m: 嵌入维数% tau:时间延迟% data:时间序列% N:时间序列长度% P:时间序列的平均周期,选择演化相点距当前点的位置差,即若当前相点为I,则演化相点只能在|I-J|>P的相点中搜寻% lambda_1:返回最大lyapunov指数值%**************************************************************************% ode计算整数阶系统的时间序列%******************************************************************delt_t1 = 0.001;t1 = 0:delt_t1:60;[tt1,y1]=ode45(@lorenz,t1,[-1,0,1]);xx1 = y1(:,1)';x1 = spline(tt1, xx1, t1);data= x1(20000:10:60000);%采样N=length(data);m=3;tau=11;%*****************************************************% FFT计算平均周期%**********************************************************x=data;xPower=abs(fft(x)).^2;NN=length(xPower);xPower(1)=[];%去除直流分量NN=floor(NN/2);xPower=xPower(1:NN);freq=(1:NN)/NN*0.5;[mP,index]=max(xPower);P=index;%*************************************************************min_point=1 ; %&&要求最少搜索到的点数MAX_CISHU=5 ; %&&最大增加搜索范围次数%FL YINGHAWK% 求最大、最小和平均相点距离max_d = 0; %最大相点距离min_d = 1.0e+100; %最小相点距离avg_dd = 0;Y=reconstitution(data,N,m,tau); %相空间重构M=N-(m-1)*tau; %重构相空间中相点的个数for i = 1 : (M-1)for j = i+1 : Md = 0;for k = 1 : md = d + (Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,j));endd = sqrt(d);if max_d < dmax_d = d;endif min_d > dmin_d = d;endavg_dd = avg_dd + d;endendavg_d = 2*avg_dd/(M*(M-1)); %平均相点距离dlt_eps = (avg_d - min_d) * 0.02 ; %若在min_eps~max_eps中找不到演化相点时,对max_eps的放宽幅度min_eps = min_d + dlt_eps / 2 ; %演化相点与当前相点距离的最小限max_eps = min_d + 2 * dlt_eps ; %&&演化相点与当前相点距离的最大限% 从P+1~M-1个相点中找与第一个相点最近的相点位置(Loc_DK)及其最短距离DK DK = 1.0e+100; %第i个相点到其最近距离点的距离Loc_DK = 2; %第i个相点对应的最近距离点的下标for i = (P+1):(M-1) %限制短暂分离,从点P+1开始搜索d = 0;for k = 1 : md = d + (Y(k,i)-Y(k,1))*(Y(k,i)-Y(k,1));endd = sqrt(d);if (d < DK) & (d > min_eps)DK = d;Loc_DK = i;endend% 以下计算各相点对应的李氏数保存到lmd()数组中% i 为相点序号,从1到(M-1),也是i-1点的演化点;Loc_DK为相点i-1对应最短距离的相点位置,DK为其对应的最短距离% Loc_DK+1为Loc_DK的演化点,DK1为i点到Loc_DK+1点的距离,称为演化距离% 前i个log2(DK1/DK)的累计和用于求i点的lambda值sum_lmd = 0 ; % 存放前i个log2(DK1/DK)的累计和for i = 2 : (M-1) % 计算演化距离DK1 = 0;for k = 1 : mDK1 = DK1 + (Y(k,i)-Y(k,Loc_DK+1))*(Y(k,i)-Y(k,Loc_DK+1));endDK1 = sqrt(DK1);old_Loc_DK = Loc_DK ; % 保存原最近位置相点old_DK=DK;% 计算前i个log2(DK1/DK)的累计和以及保存i点的李氏指数if (DK1 ~= 0)&( DK ~= 0)sum_lmd = sum_lmd + log(DK1/DK) /log(2);endlmd(i-1) = sum_lmd/(i-1);% 以下寻找i点的最短距离:要求距离在指定距离范围内尽量短,与DK1的角度最小 point_num = 0 ; % &&在指定距离范围内找到的候选相点的个数cos_sita = 0 ; %&&夹角余弦的比较初值——要求一定是锐角zjfwcs=0 ;%&&增加范围次数while (point_num == 0)% * 搜索相点for j = 1 : (M-1)if abs(j-i) <=(P-1) %&&候选点距当前点太近,跳过!continue;end%*计算候选点与当前点的距离dnew = 0;for k = 1 : mdnew = dnew + (Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,j));enddnew = sqrt(dnew);if (dnew < min_eps)|( dnew > max_eps ) %&&不在距离范围,跳过!continue;end%*计算夹角余弦及比较DOT = 0;for k = 1 : mDOT = DOT+(Y(k,i)-Y(k,j))*(Y(k,i)-Y(k,old_Loc_DK+1));endCTH = DOT/(dnew*DK1);if acos(CTH) > (3.14151926/4) %&&不是小于45度的角,跳过!continue;endif CTH > cos_sita %&&新夹角小于过去已找到的相点的夹角,保留 cos_sita = CTH;Loc_DK = j;DK = dnew;endpoint_num = point_num +1;endif point_num <= min_pointmax_eps = max_eps + dlt_eps;zjfwcs =zjfwcs +1;if zjfwcs > MAX_CISHU %&&超过最大放宽次数,改找最近的点DK = 1.0e+100;for ii = 1 : (M-1)if abs(i-ii) <= (P-1) %&&候选点距当前点太近,跳过!continue;endd = 0;for k = 1 : md = d + (Y(k,i)-Y(k,ii))*(Y(k,i)-Y(k,ii));endd = sqrt(d);if (d < DK) & (d > min_eps)DK = d;Loc_DK = ii;endendbreak;endpoint_num = 0 ; %&&扩大距离范围后重新搜索cos_sita = 0;endendend%取平均得到最大李雅普诺夫指数lambda_1=sum(lmd)/length(lmd)function X=reconstitution(data,N,m,tau)%该函数用来重构相空间% m为嵌入空间维数% tau为时间延迟% data为输入时间序列% N为时间序列长度% X为输出,是m*n维矩阵M=N-(m-1)*tau;%相空间中点的个数for j=1:M %相空间重构for i=1:mX(i,j)=data((i-1)*tau+j);endend以上是计算最大李氏指数的程序,可以运行。
Matlab画Lorenz系统的最大李雅普诺夫指数图
Lorenz 系统文档分两个文件方程m文件和计算L指数m文件分开写,复制粘贴即可运行matlab2012a,改写方程文件和参数即可算自己的系统,其中最大L指数用的是经典的柏内庭(G.Benettin)计算方法,准确快速无误!附计算结果图!!方程m文件:function dX = Loren(t,X)global a; % 变量不放入参数表中global b;global c;x=X(1); y=X(2); z=X(3);% Y的三个列向量为相互正交的单位向量% 输出向量的初始化dX = zeros(6,1);% Lorenz吸引子dX(1)=a*(y-x);dX(2)=x*(b-z)-y;dX(3)=x*y-c*z;end计算最大L指数文件Z=[];global a;global b;global c;a=10;c=8/3;d0=1e-7;for b=linspace(0,500,500)lsum=0;x=1;y=1;z=1;x1=1;y1=1;z1=1+d0;for i=1:100[T1,Y1]=ode45('Loren',1,[x;y;z;16;b;4]);[T2,Y2]=ode45('Loren',1,[x1;y1;z1;16;b;4]);n1=length(Y1);n2=length(Y2);x=Y1(n1,1);y=Y1(n1,2);z=Y1(n1,3);x1=Y2(n2,1);y1=Y2(n2,2);z1=Y2(n2,3);d1=sqrt((x-x1)^2+(y-y1)^2+(z-z1)^2);x1=x+(d0/d1)*(x1-x);y1=y+(d0/d1)*(y1-y);z1=z+(d0/d1)*(z1-z);if i>50lsum=lsum+log(d1/d0);endendZ=[Z lsum/(i-50)];endb=linspace(0,500,500);plot(b,Z,'-');title('JD_{1} 系统最大lyapunov指数')xlabel('parameter b'),ylabel('The largest Lyapunov exponents'); grid on;结果图欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习资料等等打造全网一站式需求。
Lyapunov指数的计算方法
【总结】Lyapunov指数的计算方法非线性理论近期为了把计算LE的一些问题弄清楚,看了有7~9本书!下面以吕金虎《混沌时间序列分析及其应用》、马军海《复杂非线性系统的重构技术》为主线,把目前已有的LE计算方法做一个汇总!1. 关于连续系统Lyapunov指数的计算方法? ? 连续系统LE的计算方法主要有定义方法、Jacobian方法、QR分解方法、奇异值分解方法,或者通过求解系统的微分方程,得到微分方程解的时间序列,然后利用时间序列(即离散系统)的LE求解方法来计算得到。
关于连续系统LE的计算,主要以定义方法、Jacobian方法做主要介绍内容。
(1)定义法定义法求解Lyapunov指数.JPG关于定义法求解的程序,和matlab板块的“连续系统LE求解程序”差不多。
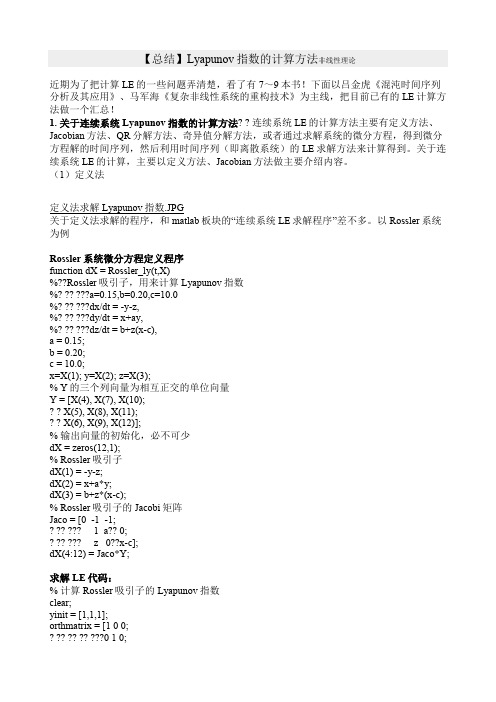
以Rossler系统为例Rossler系统微分方程定义程序function dX = Rossler_ly(t,X)%??Rossler吸引子,用来计算Lyapunov指数%? ?? ???a=0.15,b=0.20,c=10.0%? ?? ???dx/dt = -y-z,%? ?? ???dy/dt = x+ay,%? ?? ???dz/dt = b+z(x-c),a = 0.15;b = 0.20;c = 10.0;x=X(1); y=X(2); z=X(3);% Y的三个列向量为相互正交的单位向量Y = [X(4), X(7), X(10);? ? X(5), X(8), X(11);? ? X(6), X(9), X(12)];% 输出向量的初始化,必不可少dX = zeros(12,1);% Rossler吸引子dX(1) = -y-z;dX(2) = x+a*y;dX(3) = b+z*(x-c);% Rossler吸引子的Jacobi矩阵Jaco = [0 -1 -1;? ?? ??? 1 a?? 0;? ?? ??? z 0??x-c];dX(4:12) = Jaco*Y;求解LE代码:% 计算Rossler吸引子的Lyapunov指数clear;yinit = [1,1,1];orthmatrix = [1 0 0;? ?? ?? ?? ???0 1 0;? ?? ?? ?? ???0 0 1];a = 0.15;b = 0.20;c = 10.0;y = zeros(12,1);% 初始化输入y(1:3) = yinit;y(4:12) = orthmatrix;tstart = 0; % 时间初始值tstep = 1e-3; % 时间步长wholetimes = 1e5; % 总的循环次数steps = 10; % 每次演化的步数iteratetimes = wholetimes/steps; % 演化的次数mod = zeros(3,1);lp = zeros(3,1);% 初始化三个Lyapunov指数Lyapunov1 = zeros(iteratetimes,1); Lyapunov2 = zeros(iteratetimes,1); Lyapunov3 = zeros(iteratetimes,1);for i=1:iteratetimes? ? tspan = tstart:tstep:(tstart + tstep*steps);? ? ? ? [T,Y] = ode45('Rossler_ly', tspan, y);? ? % 取积分得到的最后一个时刻的值? ? y = Y(size(Y,1),:);? ? % 重新定义起始时刻? ? tstart = tstart + tstep*steps;? ? y0 = [y(4) y(7) y(10);? ?? ?? ? y(5) y(8) y(11);? ?? ?? ? y(6) y(9) y(12)];? ? %正交化? ? y0 = ThreeGS(y0);? ? % 取三个向量的模? ? mod(1) = sqrt(y0(:,1)'*y0(:,1));? ? mod(2) = sqrt(y0(:,2)'*y0(:,2));? ? mod(3) = sqrt(y0(:,3)'*y0(:,3));? ? y0(:,1) = y0(:,1)/mod(1);? ? y0(:,2) = y0(:,2)/mod(2);? ? y0(:,3) = y0(:,3)/mod(3);? ? lp = lp+log(abs(mod));? ? %三个Lyapunov指数? ? Lyapunov1(i) = lp(1)/(tstart);? ? Lyapunov2(i) = lp(2)/(tstart);? ? Lyapunov3(i) = lp(3)/(tstart);? ?? ???y(4:12) = y0';end% 作Lyapunov指数谱图i = 1:iteratetimes;plot(i,Lyapunov1,i,Lyapunov2,i,Lyapunov3) 程序中用到的ThreeGS程序如下:%G-S正交化function A = ThreeGS(V)??% V 为3*3向量v1 = V(:,1);v2 = V(:,2);v3 = V(:,3);a1 = zeros(3,1);a2 = zeros(3,1);a3 = zeros(3,1);a1 = v1;a2 = v2-((a1'*v2)/(a1'*a1))*a1;a3 = v3-((a1'*v3)/(a1'*a1))*a1-((a2'*v3)/(a2'*a2))*a2;A = [a1,a2,a3];计算得到的Rossler系统的LE为————??0.063231??0.092635??-9.8924Wolf文章中计算得到的Rossler系统的LE为————0.09? ?0? ?-9.77需要注意的是——定义法求解的精度有限,对有些系统的计算往往出现计果和理论值有偏差的现象。
用MATLAB绘制Nyquist图

• 13、无论才能知识多么卓著,如果缺乏热情,则无异 纸上画饼充饥,无补于事。Monday, December 14, 2020
14-Dec-2020.12.14
• 14、我只是自己不放过自己而已,现在我不会再逼自 己眷恋了。20.12.1401:24:0814 December 202001:24
•
3、越是没有本领的就越加自命不凡。 20.12.1 401:24: 0801:2 4Dec-20 14-Dec-20
•
4、越是无能的人,越喜欢挑剔别人的 错儿。 01:24:0 801:24: 0801:2 4Monday, December 14, 2020
•
5、知人者智,自知者明。胜人者有力 ,自胜 者强。 20.12.1 420.12. 1401:2 4:0801: 24:08D ecembe r 14, 2020
2020 1:24:08 AM01:24:082020/12/14
• 11、自己要先看得起自己,别人才会看得起你。12/14/
谢 谢 大 家 2020 1:24 AM12/14/2020 1:24 AM20.12.1420.12.14
• 12、这一秒不放弃,下一秒就会有希望。14-Dec-2014 December 202020.12.14
w = [ 0:0.01:10 ];
%确定频率范围
e = exp(j*w);
%给出指数函数ejw
r = real(e);
%求指数函数的实部,结果不显示
i = imag(e);
%求函数ejw的虚部,结果不显示
[ a,b ] = nyquist(n,d,w); %求指定频率范围内的奈氏值,不显示结果
n1 = 26;
matlab编写的Lyapunov指数计算程序
% | y x -b |
%
% Then, the variational equation has a form:
%
% F = J*Y
% where Y is a square matrix with the same dimension as J.
% Corresponding m-file:
for l=1:n1 gsc(k)=gsc(k)+y(n1*j+l)*y(n1*k+l); end;
end;
for k=1:n1
for l=1:(j-1)
y(n1*j+k)=y(n1*j+k)-gsc(l)*y(n1*l+k);
end;
end;
znorm(j)=0.0;
for k=1:n1 znorm(j)=znorm(j)+y(n1*j+k)^2; end;
% stept - step on t-variable for Gram-Schmidt renormalization procedure.
% tend - finish value of time
% ystart - start point of trajectory of ODE system.
while calculation_progress == 1
[T,Y] = integrator(DS(1).method_int,@ode_lin,[t tt],y,options,P,n,neq,n_exp);
first_call = 0;
if calculation_progress == 99, break; end;