GPS工程控制网网型设计研究
关于建设林州GPS控制网的设计研究

关于建设林州GPS控制网的设计研究目前GPS布网技术已广泛应用在城市建设的各个领域,其优越性在于很大程度上逐步取代常规仪器测量定位控制方法。
在我市利用GPS卫星定位技术建立测量控制网、进行细部测图和工程放样等测量工程具有精度高、速度快、操作简便等优越性。
我市区1:1000航测数字化成图于2003年。
当时我市总规2001—2020市区约面积50km2,规划区范围196km2。
现在我市总体规划又做了重新调整和布局,即我市总规2010—2030。
中心城区发展由原来的50km2发展至137km2,城市规划区控制范围增至为约360km2,即中心城区、北部产业集聚区和控制区。
林州在“十二五”期间有鹤辉、林长高速公路和长兖铁路通过;诸多工业大项目、水利设施等投资近数十亿元分布林州范围。
鉴于此境,为林州整体规划、科学布局和各级领导提供科学决策和优化发展目的,所以对GPS网布设尤为重要。
1 GPS网技术设计和基础材料根据现行国家标准《全球定位系统(GPS)测量规范》(GB/T18314-2009),A级网是卫星定位连续运行基准站,本节GPS网设计则主要指GPS B、C、D、E级。
GPSB、C、E级网主要是为建立国家二、三、四等大地控制网,以及测图控制点。
由于点位多,布设工作量大,布设前应进行技术设计,以获取量优的布测方案。
在技术设计前应根据任务的需要,收集测区范围已有的卫星定位连续运行基准站、各种大地点位资料、各种图件,地质资料,以及测区总体建设规模和近期发展方向的资料。
1.1 我市测区内外有国家二、三等三角点成果计五点,可作测区四等GPS 起算点;1.2 我市有合涧—安阳二等水准路线经过测区外,其中二等水准点合安2、合安5距测区甚近,可作测区三、四等水准网的起算点;1.3 现有1∶5000彩印地形图,可作基础控制网设计之用;在开始进行GPS布网技术设计时,应对上述资料分析研究、勘察,然后进行图上设计。
图上设计主要依据任务GPS网布设的目的、等级、边长、观测精度等要求,综合考虑测区已有的资料、测区地形、地质以及作业效率等情况,按照优化设计原则在设计图上标出新设计的GPS点的点位、点名、点号和级别,还应标出相关的各类测量站点、水准路级及主要的交通路线、水系和居民地等。
GPS控制网的技术设计

GPS控制网的技术设计【摘要】讨论GPS控制网技术设计的一般原则和图形设计,结论认为:传统的控制测量方法将被GPS技术所取代。
【关键词】GPS 控制网技术设计原则图形设计1 引言GPS它的含义是:利用导航卫星进行测时和测距,以构成全球定位系统。
GPS具有全能性、全球性、全天候、连续性和实时性的精密三维导航与定位功能,而且具有良好的抗干扰性和保密性。
因此,GPS技术在大地测量、工程测量、航空摄影测量、海洋测量、城市测量等测绘领域得到了广泛的应用。
2 技术设计的一般原则建立城市或其它局部性GPS控制网是一项重要的基础性工作,而技术设计则是建立GPS网的第一步,是保证GPS网能够满足经济建设需要,并保证GPS成果质量可靠的关键性工作。
因此,必须科学地、严谨地作好这一工作。
GPS网设计设计的一般原则包括以下几个方面。
2.1 充分考虑建立GPS控制网的应用范围对于工程建设的GPS网,应该既考虑勘测设计阶段的需要,又要考虑施工放样等阶段的需要。
对于城市GPS控制,既要考虑近期建设和规划的需要;又要考虑远期发展的需要;还可以根据具体情况扩展GPS控制网的功能,充分发挥GPS网和测绘工作在城市建设中的作用。
2.2 采用分级布网的方案适当地分级布设GPS网,有利于根据测区的近期需要和远期发展分阶段布设,而且可以使全网的结构呈长短边相结合的形式。
与全网均由短边构成的全面网相比,可以减少网的边缘处误差的积累,也便于GPS网的数据处理和成果检核分阶段进行。
分级布网是建立常规测量控制网的基本方法,因为GPS测量有许多优越性,所以并不要求GPS网按常规控制网分很多等级布设。
例如,大城市的GPS控制网可以为三级:首级网中相邻点的平均距离大于5km;次级网中相邻点平均距离为1~5km;三级网相邻点平均距离可小于1km,且可采用GPS 与全站仪相结合的方法布设。
对于小城市,分两级布设GPS网即可。
2.3 GPS测量的精度标准GPS测量的精度标准通常用网中相邻点之间的距离中误差表示,其形式为:式中:σ——距离中误差(mm);a——固定误差(mm);b——比例误差系数(ppm);d——相邻点的距离(km)。
桥梁GPS控制网的布设研究
1 桥 梁 GP S控制 测量
f j i j
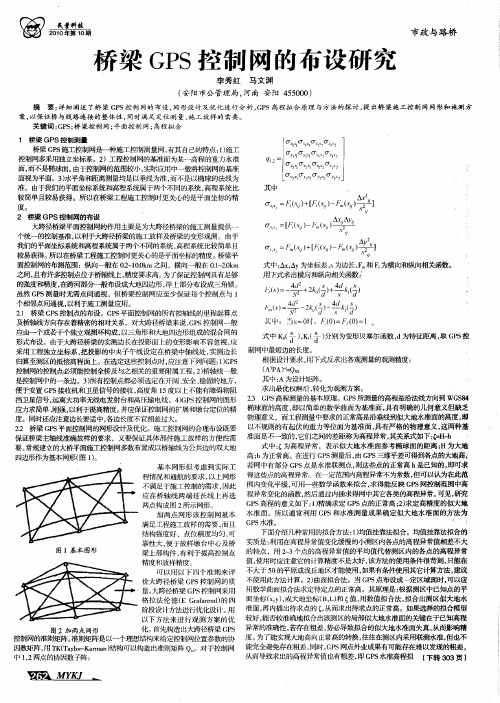
桥梁 G S施工控制网是一种施工控制测量网, P 有其 自己的特点 :) 1施工 1 ~ l 2 控 制网多采 用独 立坐标 系 。2 )工程 控制 网的 基准 面为某 一高 程 的重力 水准 q l 2 盯 面, 而不是椭球面。 由于控制网的范围较小, 实际应用中一般将控制网的基准 1 2 盯 I - H j 面视为平面。3水平角和距离测量均是以垂线为准 , ) 而不是 以椭球的法线为 准。由于我们的平面坐标系统和高程系统属于两个不同的系统, 高程系统 比 其中 )【 + ( ( xo ) 2】 z  ̄ 较简单且较易获得。所以在桥梁工程施工控制时更关心的是平面坐标 的精 度。 2 桥梁 GP S控制网的布设 ) _/ ) 大跨径桥梁平面控制网的作用主要是为大跨径桥梁的施工测量提供一 个统一的控制基准, 以利于大跨径桥梁的施工放样及桥梁的变形观测。由于 我们的平面坐标系统和高程系统属于两个不同的系统 , 高程系统比较简单且 洲 ( 】 ) 一 较易获得。所以在桥梁工程施工控制时更共 l的是平面坐标的精度。 桥梁平 面控制网的布测范围:纵向一般在 0 ~O k 2 l ̄ m之间 ,横向一般在 012 k . . m -0 式中: xA 为坐标差 ,为边长, F为横向和纵向相关函数。 A ,y s F和 . 之间, 且有许多控制点位于桥轴线上, 精度要求高。 为了保证控制网具有足够 用下式求出横向和纵向相关函数 : 的强度和精度, 在跨河部分—般布设成大地四边形 , 岸上部分布设成三角锁。 虽然 G S测量时无需点间通视 ,但桥梁控制网应至少保证每个控制点与 1 P 个相邻点间 通视, 以利于施工测量应用。 i ¨: 一 ( 卜 4 ' l z ( 2 S 0 ) 2 桥梁 G S 1 P 控制点的布设。G S平面控制网的所有控轴线的里程起算点 P L. } J =O () () 州, O = 0=1。 及桥轴线方向存在着精密的相对关系。 对大跨径桥梁来说 ,P 控制网一般 GS 应由—个或若干个独立观测环构成, 以三角形和大地 四边形组成的混合网的 式中K( ,。 分别 形贝 S) ( , K }) 为变 塞尔函 d 特征 丁 数,为 距离, P 控 取G ¥ 形式布设 。由于大跨径桥梁的实测边长在投影面上的变形影响不容忽视 , 应 采用工程独立坐标系 , 把投影的中央子午线设定在桥梁 中轴线处 , 实测边长 制 网 中最短边 的长 度 。 根据设计要求 , 用下式反求出各观测量的观测精度: 归算至测区的抵偿高程面上。在选定这些控制点时 , 应注意下列问题:) P 1G S ( A) Qx Ap 一 x = 控制网的控制点必须能控制全桥及与之相关的重要附属工程。 ) 2桥轴线一般 其中: A为设 计矩 阵。 是控制网中的一条边。3所有控制点都必须选定在开阔 、 、 ) 安全 稳固的地方 , 求 出最 优权 解后 , 为观 测方案 。 转化 便于安置 G S P 接收机和卫星信号的接收, 高度角 l 度以上不能有障碍物阻 5 - P 3 P S 挡卫星信号, 远离大功率无线电发射台和高压输电线。4G S控制网的图形 2 G S高程测量的基本原理。G S所测量的高程是沿法线方向到WG M )P 即以简单的数学曲面为基准面 , 具有明确的几何意义但缺乏 应力求简单、 刚强 , 以利于提高精度。 并应保证控制网的扩展和墩台定位的精 椭球面的高度 , 物理意义,而工程测量中要求的正常高是沿垂线到似大地水准面的高度 , 即 度。 同时还应 注意 边长要 适 中 , 长度 不宜 相差过 大 。 各边 具有严格的物理意义 , 这两种基 2 桥梁 G S平面控制网的网形设计及优化。施工控制网的合理布设既要 以不规则的有起伏的重力等位面为基准面, . 2 P 它们之间的差距称为高程异常, 其关系式如下: H h g - = 保证桥梁主轴线准确放样的要求,又要保证具体部件施工放样的方便性需 准面是不一致的, 式中: 为高程异常,表示似大地水准面参考椭球面的距离 ; ( H为大地 要。 常规建立的大桥平面施工控制网多数布置成以桥轴线为公共边的双大地 高 ; 为正常高。 亍 P 测量后, P 三维平差可得到各点的大地高 h 在i G S 由G S 四边形作 为基本 网形 ( 1。 图 )
关于建设林州GPS控制网的设计研究
河南
林州
465 ) 5 5 0
区三、 四等水准网的起算点 :
之用 :
各个领域 ,其优越性在于很大程度上逐步取代常规 13 现有 1 0 0彩 印地形 图 , . :0 5 可作 基础 控制 网设计 仪器测量定位控制方法。 在我市利用 G S P 卫星定位 技术建立测量控制网、进行细部测图和工程放样等
号, 选点后正式命定点名。
作者简介: 张中庆(933 ) 男 , 17 . , 汉族 , ~ 河南林 州人 , 大学本科 , 工程师 , 现主要从事工程测 量。
8 8
科技视界 S INCE&T C CE E HNOL Y VIW OG E
S in e & tc n l g iw ce c eh oo yve
边 长 20i。平 差 后 ,最 弱边 相 对 中误 差应 小 于 1 .n k /
点, 可作测区四等 G S P 起算点: 1 我市有合涧一安阳二等水准路线经过测区外 , . 2
40 0 点位中误差应不超过 ̄ c 设计点位暂行编 50 , 5m。
其 中二等水准点合安 2合安 5 、 距测 区甚近, 可作测
S i n e& t c n l g iw ce c e h oo y v e
GPS静态测量控制网设计

GPS静态测量控制网设计一、概述GPS(全球定位系统)已经成为现代测量技术中不可或缺的重要工具,GPS静态测量控制网是GPS测量的基础。
设计一个合理的GPS静态测量控制网是确保测量精度和可靠性的关键。
二、控制网的选择在设计GPS静态测量控制网时,首先需要选择合适的控制网。
控制网的选择应考虑以下几个因素:1.网格密度:控制网的网格密度应根据测量任务的要求来确定。
一般情况下,密集网络可以提高测量精度,但也会增加测量成本。
2.控制点的分布:控制点的分布应考虑地形地貌的特点和监测要求,避免林木、建筑物等对测量结果的影响。
3.控制网形状:控制网形状的选择应根据工程特点和测量任务来确定,一般情况下选择长方形或正方形网格。
三、测量基线的设置测量基线是控制网的基础,其合理设置对测量结果的精度和可靠性有重要影响。
在设置测量基线时,应考虑以下几点:1.基线长度:基线长度应根据地质地形条件、测量精度要求等因素选择合适的长度。
一般情况下,短基线适用于地形平坦、视线通畅的地区,长基线适用于山区、密林等复杂地形。
2.基线方向:基线方向应考虑测量任务的要求和地形地貌特点,避免遮挡物对测量结果的影响。
3.基线标记:基线标记应清晰明确,便于测量人员进行测量操作。
四、控制点的设置控制点是控制网的关键,其合理设置对测量结果的精度和可靠性起着决定性作用。
在设置控制点时,应考虑以下几点:1.控制点的选取:控制点的选取应根据测量任务的要求和地形地貌条件来确定,避免地形高低起伏、建筑物等对测量结果的影响。
2.控制点的标记:控制点的标记应清晰明确,确保测量人员可以准确找到控制点进行测量操作。
3.控制点的互测:控制点应进行互测,以验证控制点的准确性和可靠性。
五、数据处理数据处理是GPS测量的重要环节,其正确性和高效性对测量结果的精度和可靠性有着至关重要的影响。
在数据处理过程中,应注意以下几点:1.数据的准确性:数据的准确性是保证测量结果准确的前提,应根据实际情况采取合适的方法和工具确保数据的准确性。
GPS控制网的技术设计探讨

C ≤ 1 0
≤6
E ≤1 0
≤ 1 0
匮定 差 a( ) 是 u
比倒 谩 差幕 敛 b (pL p l  ̄
≤1 0
≤2 0
因 素 ,以 期 在 满 足 要 求的 前 提 条 件 下 ,取 得最佳效益 。 ( ) 设 计 的 基 本 原 则 一 l、G P S 网一 般应 采用 由独立 观测 边 构成 的 闭合 图 形 。 例 如 三 角形 、多 边形 或 附 和 线 路 ,以 构 成 检核 条件 ,提 高 网 的可
盛
维普资讯
昌圈 里
GP S控制 网的技术 设计探讨
文0 李芳芳 赵新华 ( 南省地质 测绘 总院 河 南郑州) 河 摘 要 : 本 文 结 合 多 来 的 工 作 实 践 ,
也可 以包含 一些 附和 路线 ,G PS 网 中不允 由地 面 的 电 磁 波测 距 边 确 定 ,或 由 两个 以
上 的起 算点 之间 的距离 确定 ,也 可以 由 主 要 对 GPS 控 制 网技 术 设 计 的 一 般 原 则 和 许 存 在 支 线 。 GPS基 线 向量的 距离确 定 。 图形 设 计 的有 关 问题 进 行 了认真 研 究 。 具 ( ) G P S 测 量 的 精 度 标 准 三 ( )G P S 点 的高 程 五 有 一 定 的 借 鉴意 义。 G PS测 量 的精度 标准 通常 用 网中相邻 为 了得 到 G P 点的正 常高 ,应使 一定 S 关键 词 : s;控 制 网 ;技 术设 计 ;图 G P 点 之 间 的 距 离 中 误 差 表 示 ,其 形式 为 : 数 量的 G PS点 与水准 点重 合 ,或 者对部 分 形 设 计 丽 引言 式 中: o 一距离 中误差 ( i ) 一 G P S 点 联测 水 准 。 为 了便 于 进行 水 准联 一 i n ;a n 测 ,且 便于进行 GPS观测 ,提高 GPS作业 GP S是英文 Na iain S tlt m— vg t ael e Ti o i 固定 误差 ( i nm ) b一 一 比例 误差 系数 l 效 率 ,G 点一 般应 设 在 交 通便 利 的地 PS i g a d Ra g n / o a o iin n y — n n n i g Glb lP st i g S s— o ( Pi ) d一一 相邻 点的距 离 ( i 。 P n l k n) t m 的字 头缩写词 NAVS e TAR/ S的简 GP 2 0 年 实施的 “ 01 全球 定位系统 ( S 方 。 GP ) 三 ,GP s控制 网的 图形设 计 称 。它 的 含 义是 :利 用导 航 卫 星 进 行 测 时 测量 规范 ”将 GPS的测量 精度 分为 AA ~
GPS控制网布设与解析
网优化 设计进 行 了一 些探 讨 。
关键宇: 控制网; 优化设计 ; 精度 ; 可靠性 中图分类号 : P2 2 8 . 4 文献标识码 : B
重 要的工作 。而在 G P S网形设计 时, 因G P S同步观测
权 相关 甚小 ,而影 响精 度 的主要 因素是 网中各 们提 出 G P S
网形结 构强 度优化 设计 的概念 。
2 G P S控 制 网的基准 设计 应考虑 的 问题
设G P S网二 维平 差 的误 差方程 :
f V = B X 一 1
J 2 m×1 2 m x^n× 1 2 m x1
根据 构成 的函数形式 的不 同可分 为 4种类 型 :
1 ) A最优 标准 。A最 优化标 准 就 是在 各种 可选
择 方案 中找 到一个各待 定参数 方差 之和最 小 的优化
是根据偶然误差的传播规律, 按照一定的精度设计
方法 ,分 析 网中各 未知 点 坐标 及 其 函数 在平 差后 预
期能够达到的精度。 G P S 控制网在网形设计后, 就可
・
4 6・
露天采矿技术 2 0 1 3 # - g 1 期
6 优 化设计 常用 的纯量精度 指标
以根据所 选 择的接 收 机标称精 度 ( 或检 验精 度 )估 算 各待定点 精度 、 待定 边边 长精度 和方位 精度 。
1 ) 减少 尺 度误 差 。在 G P S控 制 网 中加 2—3段
不 要求通 视 ,对测 站点 间相 互 的边角 也 没有过 高 的 限定, 所 以其 图形 设计 具 有较 大 的灵 活性 。根据 不 同
城市GPS控制网建设关键技术分析研究

城市GPS控制网建设关键技术分析研究摘要:随着信息技术的进步,出现了一种新测量技术,即gps定位测量技术,该技术以高效率与精度等特点在测量中被广泛地应用,尤其在城市控制网的建设过程中,通常情况下均会选择gps来辅助其建设。
下面文章就城市gps控制网建设中的关键技术进行研究和分析,着重从城市gps静态网布设及测量这两方面的内容来进行阐述。
关键词:城市gps控制网;关键技术;测量;布设一、城市gps静态网布设(一)gps静态控制网的布设原则第一,在该控制网中,不可有自由基线,在控制网闭合条件中其基线不能过多;第二,基于“每一点至少应该独立设站观测两次”这一原则来进行gps网的布设;第三,为了使地面网与gps静态网间的坐标实现转换,在该控制网中gps静态网和地面网的重合点至少有两个;第四,为了使其观测更为合理、方便,其gps静态网应该尽量选择在容易到达、交通便利且视野较为开阔的位置;第五,采取分级布网的方式,该方法为构建常规测量控制网的一个主要手段,基于城市测区近期发展与远期发展的需求来进行gps静态网的布设,进行布设时,因gps测量自身具备的优越性较多,对此可不用根据常规控制网来将gps静态网分为多级,通常情况下,在大城市中,其gps静态网分为三级来进行布设,而在小城市中则分为两级来进行gps静态网的布设。
(二)gps静态网形分类第一,星形网。
采取这种布设网形时,在观测过程中,只需布置两台gps接收机就可完成其观测工作,由于在网形中,其作业劳动量较低,且操作也较为简单,因此常被应用于碎部测量、工程放样、地籍测量以及边界测量等。
由于在处理中心,所获得的gps数据不能发现粗差的点位以及基线等,其点位坐标与实际坐标之间存在着一定的差别,再加上在基站中,这种网形的观测边通常情况下不会构成一种闭合形状,因此其检验能力比较差。
在实际城市gps控制网的建设过程中,若其条件允许,通常不会采用这种网形,如果必须要采用这种网形,在建设过程中,应加大对其周围点的检查力度。
gps工程控制网的优化设计

.192-|工程设计I Engineering Design(2019年第21期〕GPS工程控制网的优化设计孔祥豪(苏交科集团股份有限公司,江苏南京210019)摘要:GPS测量技术手段精度较高、效率较高,具有一定的灵活性,其应用范围越来越广泛。
分析GPS X程控制网的基础原理以及各项关键因素,综合实际状况根据规定要求,进行GPS工程控制网的优化设计,可以为GPS工程控制网的优化工作提供参考与支持。
基于此,文章主要对GPS X程控制网的优化设计进行了简单的分析,研究了GPS控制网定位原理与种类,分析了GPS相对定位的误差源分析,重点探究了GPSX程控制网的优化设计的方式与手段。
关键词:GPS工程控制网;优化设计;精度中图分类号:S127文献标志码:A文章编号:2096-2789(2019)21-0192-021GPS控制网定位原理与种类根据己知点、仪器架设位置、未知点的参数,可以将其分为前方、侧方以及后方交会三种结构类型。
GPS 定位原理是通过几何以及物理的基础性原理,通过空间运行的卫星与地面点距离交会地面测量其未知位置。
GPS定位测试种类繁多,根据基本观测量的不同可以将其分为伪距测量以及载波相位测量两种形式:根据参考点位置的不同可以分为绝对定位以及相对定位两种方式;根据定位结果获得的时效可以分为定时定位以及事后定位两种;根据接收机在测量作业中的状态可以将其分为静态定位以及动态定位两种形式。
现阶段高精度的GPS静态定位主要通过相对定位的方式分析,将在相位作为主要的观测量,其基本的组合方式可以分为单差、双差以及三差几种形式,差分的结果与计算的量之间有着密切的关系。
通过差分形式观测可以有效降低存在的系统误差,达到控制平差计算中未知数数量的目的。
通过GPS定位,基于GPS卫星以及用户接收机天线距离作为基本的观测量,根据对已知卫星瞬间坐标确定分析用户接收机对应的点位参数,进行测量分析。
2GPS相对定位的误差源GPS测量中会受到多种误差的综合性干扰因素的影响,降低GPS定位的精准性。
GPS控制网的布设原则及优化设计探讨
2 2笠 01
中 国
水
运
VoI 2 .1
M ay
No. Z1
201 2
GP S控 制 网 的布 设 原 则 及 优 化 设 计 探 讨
杨 秀 明 ,赵 永 刚 ,黄 再 志
2 高精 度 性 原 则 .
的位置不会影 响网的精 度。GP 控 制 网的精度主要取决于 网 S
中个 点 发 出 基 线 的 数 目及 基 线 的权 阵 。
( 江 省 第 七 地 质 大 队 , 浙江 丽 水 3 3 0 浙 2 0 0)
摘
要: 随着 GP S测量技术 的迅速发展及 其在 测绘领域的广泛应用 , S控制 网的优化设计越来越受到重视 。 S GP GP
控 制 网在 布 网 方 案和 平差 模 型 方 面 都 不 同 于 经 典 控 制 网 。文 中 在 总 结 了 GP 网特 点 及 优 化 设 计 原 则 ,如可 靠性 、精 S 度 及 经 济 性 等 方 面特 点 ,并提 出 了 GP S控 制 网 的优 化 设 计 的措 施 。 关 键 词 :GP S控 制 网 ;布 设 原 则 ;优 化 设 计 ;精 度 ;可 靠 性 ;经 济 性
近 年 来 ,GP 技 术 被 广 泛 应 用 到测 量领 域 。 GP 控 制 网 S S 的建 立 , 改 变 和 取 代 了控 制 测 量 过 去常 用 的 测 角 网、 边 网 、 测 导 线 网等 传 统 方 法 ,是 现 代 测 绘 工 程 建 设 项 目中一 项 非 常 重
要 的技 术 进 步 。
三 、G S 制 网 布 设应 坚持 的 原则 P控
1 效 率优 先 原 则 .
一
GPS控制网的优化设计研究
零级 优化 设计 是在 已知 GPS 控制 网平 差模 型中 的强 度设 计。
的 系 数 阵 A 和 权 阵 P 的 基 础 上 , 求 解 协 因 数 阵 2 基于 预报 星历 的控 制网 优化
Qxx 的 过 程。 这实 际 上是 一个 平 差的 过 程, 除 了一
众所 周知 , 由传 统 方法 布 设和 观 测的 我 国平 面
图形 结 构和 拟定 观测 方 案时 , 可 根据 预 报星 历 预报 GPS 控 制 网进 行 网的 加 密和 改 进, 使 其逐 渐 达到 精
的卫 星分 布的 情况 对 GPS 控 制网 进行 优化 设计 。 1 GP S 控制 网的 优化 设计
度要 求, 也 就是 对网 形 结构 强 度的 优 化设 计 。综 上 所述 , GPS 控 制 网的 优 化设 计 主要 归 结为 二 类内 容
业于太原理工大学, 助理工程师。
与 GPS 观 测对 点位 的要 求相 矛 盾, 同时 , 根 据 实际 情况 , 这 些 国家 高级 点 作为 起 算点 时 必须 联 测, 即 使是 重新 布 设新 网, 按 照规 范 要求 , 对于 一 些原 有
由于 GPS 控制 网同 经典 网有 诸多 不同 , 导 致了
的 设 计[1]: GPS 控 制 网 基 准 的 优 化 设 计 ; GPS 控 制
GPS 控 制 网的 优化 设 计不 完全 等 同于 经 典控 制 网的 优化 设计 , 一 般可 分为 四级 。
网 图形 结 构 强 度 的 优化 设 计 , 包 括 网 的 精度 设 计 、 网的 抗粗 差 能力 的可 靠 性设 计 、网 发 现系 统 差能 力
控制 网的 优 化设 计是 指 在限 定精 度 、可 靠 性和 GPS 控 制网 来说 没有 太大 的意 义。
长输管线工程GPS控制网的设计
GPS 技术的发展改革了传统的长输管线 测量模式, 在长输管线工程中提高了工程测量 的精度, 降低了劳动强度, 提高了工作效率, 为 管线工程建设提供了保障[’ 。 , 21 随着长输管线工程建设规模的不断扩大 , 长输管线穿越各种地形、地质情况复杂以及 水系发达区域, 对长输管线工程测量的精度都 有很高的要求。有必要对GPS 定位技术在长 输管线工程测量的各个阶段的应用做系统的 设计研究分析, 以适应当前长输管线工程建设
间距不应大于20km。
1. 1. 2 两网连接处的处理 为保证各网之间的精确连接, 在两个网的 连接处应至少布设两个以上的GPS 重合点。 1. 1. 3 GPS 平面控制点间的通视要求 GPS 平面控制点间一般可允许不通视, 但 在将 GPS 平面控制点作为线路电磁波测距导
应用Ashte h solutions软件进行平差计 c
点 。
(3 每段平差之后, ) 与上段平差结果的公共 点进行比较, 若相差太大, 则应检查起算控制 点是否发生偏移或沉降, 以及在观测过程中是
否有粗差存在 , 以及时作出调整。
1. 3 对国 家平面控制点的检查
1 长输管线首级G 控制网的技术设计 s P
4 80 k m 。
的意 义 。
为保持长输管道GPS 控制网精度的一致 性, 使管道公路、站场 、基地 、隧道 、河 流穿跨越等工程测量控制网与ቤተ መጻሕፍቲ ባይዱ道线路测量
首先选两个精度等级高的国家平面控制 点作为基准进行约束平差, 然后将其余国家平 3 结语 面控制点的已知坐标、各点间相对距离、方 本文结合GPS 技术在长输管线工程建设 的要求 。 位与对应点的GPS 坐标、距离和方位进行综 各阶段应用的实际经验, 进行分析比较, 研究 文中结合长输管线工程的特点和实际需 合比较, 以判断国家平面控制点是否有问题。 了 长输管线GPS 控制测量的优化设计。通过 求对长输管线工程 GPS 控制网的布设方法、 对国家控制点的检验也可采用回归分折法。 具体事例, 总结了 长输管线工程GPS静态控制 设计原则、数据处理做了系统的分析研究, 总 网技术设计应该注意的问题及措施, 得出了一 结了长输管线工程 GPS 静态控制网技术设计 2 长输管线G 数据采集及处理 s P 些有益于实际工作的经验。实践表明, 这些 应该注意的问题及措施。 2006 年 1 月, 0 我公司施测了 石化公司的 工作对降低长输管线工程中测量外业的劳动 气田开发工程及外输管线工程, 管线长度 强度, 提高作业效率, 降低作业成本具有重要
GPS控制网优化设计探讨与分析
1 . 2 高精 度 原 则
高精度是 G P S控制相对 于其他控 制最 明显 的优 势之一 , 它是 的测量控制 网 , 本文将就上述几方 面的标准 对 G P S控制 网的优化 测量工作 的基 石 。设 计 时先 确 定 网形 结 构 , 再 根 据 网形 , 得 到 设计进行解析 。 G P S控制 网的设 计矩阵 。通过对常 用坐标 方差 , 也就 是协方 差阵
1 GP S控 制 网设计 原则
进行分析确认整 个控 制 网的精度 指标 。实际应 用 时多用 点 与点
角度和方位的方差或标准差来进行 比较分析 。 对G P S控制 网优化设计就 是对 它的可靠性 、 精 确性 和经济性 之间的距离 、
选取前 2 1个数据作为学习样本 , 分别 利用 多元 回归 模型 、 时 出输入与输 出之 间的内在 关系 , 从 而建立模 型 。从表 2中可以发
[ J ] . 现代 测绘 , 2 0 0 4, 2 7 ( 1 ) : 3 6 - 3 8 . [ 3 ] 史玉峰 , 孙保琪. 时 间序列分析及其在 变形数据 分析 中的应
用[ J ] . 金属矿 山, 2 0 0 4 ( 8 ) : 1 3 - 1 5 . 表 2中误差为预测值 与实测值之差 , 由表 2可 以看 出, 在 3种 [ 4 ] 胡伍生. 神 经 网络理论 及其 工程应 用[ M] . 北京: 测 绘 出版 模型 中 , 神经 网络模 型的拟合精度 最好。 社. 2 0 o 6 .
问序列模型 、 神经 网络模 型预 测后 3个样本 的变形 量 , 其结 果对 现神经 网络模 型预测 结果较好。 比见表 2 。
表 2 预测数据对 比表
实 多元 回归模型 时间序列模 型
参考文献 :
gps控制网的设计原理与应用

GPS控制网的设计原理与应用1. 简介GPS(全球定位系统)控制网是由一组参考站点组成的网络,用于测量和监控全球范围内的GPS信号。
它主要用于提供高精度的地理信息和定位服务,广泛应用于航空、航海、测绘、交通、农业等领域。
2. 设计原理GPS控制网的设计原理主要包括以下几个方面:2.1 参考站点的布局参考站点是GPS控制网的基础,它们被布置在不同的地理位置,通过接收卫星信号来测量和监控GPS信号。
参考站点的布局应该合理,以覆盖特定区域内的目标区域。
通常,参考站点的间距需要根据地理条件、信号强度和精度要求等因素进行调整。
2.2 数据采集与处理参考站点通过接收卫星信号后,会将信号数据进行采集并传输到数据中心进行处理。
数据中心通过特定的算法和模型,对采集到的数据进行处理和分析,以获得更精确的地理位置信息和定位结果。
2.3 精度控制与校正GPS控制网的设计原理还包括精度控制和校正。
GPS信号在传输过程中会受到多种因素的影响,如大气、地形、建筑物等,这些因素可能会导致信号误差。
为了保证精确的定位结果,GPS控制网需要进行精度控制和校正,通过校正模型和算法来修正信号误差,提高定位的准确度。
3. 应用GPS控制网的应用十分广泛,主要包括以下几个方面:3.1 航空航海在航空航海领域,GPS控制网被用于导航、飞行路径规划、飞机定位等方面。
通过精确的定位信息,可以确保飞机和船只在空中或海上的准确位置,提高飞行安全性。
3.2 测绘与地理信息系统GPS控制网在测绘和地理信息系统中也是非常重要的。
通过在参考站点上设置GPS接收器,可以实时获取高精度的地理位置信息,用于测绘边界、制作地图、进行地理数据分析等。
3.3 交通与导航GPS控制网在交通和导航领域也有广泛应用。
通过GPS定位,可以提供实时的交通信息和导航指引,帮助驾驶员选择最佳的路线、避开拥堵和事故,并提高交通流畅性和安全性。
3.4 农业在农业领域,GPS控制网可以应用于精准农业管理。
浅谈GPS控制网的技术设计
级 别 A A A 30 o B , 0 C 1 0~l 5 D 5一l 0 E 0 2— . 5
平 均 距 离 l0 Oo
G S测量规范和规 程通 常都是 针对一 般情况 制定 ,所 P 以在特殊情况下 ,测量单位仍需按照测量任务书或测量合同 中的技术要求单独进行技术设计 。例如在大坝变形观测 中,
要】 主要 阐述 了在 G S控制 网测 量 中, P 如何进行控制 网的技 术设计 。介 绍了 G S控制 网技术设 P
计的一般原则、 基准设计和网形设计 , 以及技 术设计 的注意事项。 【 关键词 】 G S 控 制网; 技术设计 ; 基准设计 ; 网形设计 P; 【 中图分类号】 P 2. 2 84
维普资讯
浅 谈 G S控制 网 的技 术设 计 P
.
沙 尚典 乔建 林 , ,
(.西南交 通大 学土木 工程学 院 , t 1 N3成都 603 ;.江 苏博学 建设工 程有限 公 司 , l 10 12 江苏南 京 200 ) 100
【 摘
量 规 程 及 细则 。 ]
1 2 技 术 设 计 的 一般 原 则 .
固定 误 差 ( mm)
≤: 3 ≤: 5 ≤: 8 ≤l 0 ≤l 0 ≤l O
比 例误 差 ( p pm)
40 01 ≤0 l ≤l ≤5 ≤l 0 ≤2 O
[ 收稿 日期 ]20 0 0 7— 4—3 O
展的需要 ,还可 以根据 具体 情况 扩展 G S控 制 网的功 能。 P
如有 的城 市 和 矿 区 G S网既 可 以 为 工 程 建设 服 务 ,又 可 以 P 作 为 变形 监 测 网。
GPS工程控制网的布设
计算 出观测站 的三维位置 ,甚至三维速度
三角网中各三角形边是 由非同步观测的 位点 , 以便 方便连测 。
有 良好 的 自检能力 ,能有 效地发现观测成果 的粗差 , 确保网的可靠性 。 经平差后 网中相邻 点间基线 向量 的精度分布均匀。这种 网的主 要缺点是观测工作量较大 ,尤其 当接收机的 数量较少 时 , 将使观测工作 的时间大为延长 。 因此 ,通常只有 当网的可靠性和精度要求较 高时 , 才单独采用这种图形结构 的网。
星发射的星历 ,即描述 卫星运动及其轨道
的参 数算 得 的 。每 颗 G S卫 星 所 播 发 的 星 P 历 , 由地 面 监 控 系统 提 供 的 。 星 上 的各 是 卫
G S测量的劳动生产 牢 。9 P 0年代初期 , 基
于 载 波 相 位 观 测 值 静 态 初 始 化 的实 时 动 态 定 位 技 术 ( T 已开 始 问 世 了 , 别 是 9 R K) 特 0 年 代 中期 , 着 A O ( mb ut R sl 随 R F A i i eu — g y a t n o h l) 术 的 成 熟 , 态 求 解 初 i n te Fy 技 o 动 始 整 周 未 知 数 的理 论 成 果 转 化 成 为 实用 技
( ) 间星 座 部 分 1空
中必须始终保持 4颗 以上 卫星信号连续 锁
定 的难 题 。 真正 实 现 r实 时 G S 量 关 键 P测 技 术 的商 品 化 。 自 19 9 2年起 , 国际 G S大 P 地测量 和地球动力学 服务 IS G ,已 在 全 球 建 立 了 多个 数 据 存 储 及 处 理 中心 ,和 百余 个 常年 观 测 的 台 站 。 国也 于 19 我 9 5年 开 始 分 步 建 设 北 京 、 海 、 汉 、 萨 、 鲁 木 上 武 拉 乌 齐 、 安 、 宁 、 明 、 口、 尔滨 等 G S 西 西 昆 海 哈 P 永 久 性 跟 踪 站 ,这 些 跟 踪 站 的 观测 数 据 每 天通 过 国 际互 联 网传 向美 国 的数 据 处理 中
GPS控制网的建立与技术设计

第三节GPS控制网的建立与技术设计一、GPS控制网的建立通常将应用GPS卫星定位技术建立的控制网称为GPS网。
与常规方法相比,应用GPS卫星定位技术建立控制网的主要特点是:1.采用相对定位方法,即若干台GPS接收机同步观测,确定各点之间的相对位置,并采用载波相位测量,从而得到高精度的测量结果。
2.GPS测量不要求各点之间互相通视,使得控制点的点位选定灵活方便。
3.GPS测量可以全天候进行,不论白天黑夜或晴天雨天,均能正常工作,使得测量工作更具有计划性。
4.观测时间短,当测站之间的距离小于30km时,同步观测1~2h便可得到较好的观测成果;当测站之间的距离小于10km时,还可采用快速定位方法,观测时间可以缩短为10—20min,甚至更短。
5.GPS测量的观测数据是自动记录的,GPS基线向量的计算和GPS网的平差计算的自动化程度很高。
目前大致可以将GPS控制网分为两大类:一类是国家或区域性的高精度的GPS控制网。
(相邻点的距离通常是从数千公里至数百公里),其主要任务是作为高精度三维国家大地测量控制网,以求定国家大地坐标系与世界大地坐标系的转换参数,为地学和空间科学等方面的科学研究工作服务;或者是对GPS网进行重复观测,用以研究地区性的板块运动或地壳形变规律等问题。
另一类是局部性的GPS控制网,包括城市或矿区GPS控制网,或其它工程GPS控制网。
一般来说,这类GPS网中相邻点间的距离为几公里至几十公里,其主要任务是直接为城市建设或工程建设服务。
GPS控制网的建立按其工作性质可以分为外业工作和内业工作两大部分。
外业工作主要包括选点、建立测站标志、野外观测作业等;内业工作主要包括GPS控制网的技术设计、数据处理和技术总结等。
也可以按工作程序大体分为GPS网的技术设计、仪器检验、选点与建造标志、外业观测与成果检核、GPS网的平差计算以及技术总结等若干个阶段。
尽管GPS测量具有一些优越性,但为了得到可靠的观测成果,也必须有科学的技术设计,严谨的作业管理和工作作风,且GPS测量也应遵循统一的规范。
工程控制网优化设计方案
工程控制网优化设计方案一、引言随着现代社会的发展,大部分工程项目都会使用到工程控制网。
工程控制网是一个用于地形测量和工程建筑的重要基础设施,在土木工程、建筑工程、水利工程和交通工程等领域都有着广泛的应用。
因此,如何优化工程控制网设计是一个重要的课题。
通过对工程控制网进行优化设计,可以提高工程测量的精度和效率,减少测量成本,为工程施工提供更好的保障,达到经济和社会效益。
本文将介绍工程控制网的基本概念和作用,分析工程控制网优化设计的必要性,然后提出一种基于GPS和GIS技术的工程控制网优化设计方案,并对其进行深入探讨。
二、工程控制网的基本概念和作用工程控制网是用于工程测量和建筑的一种基础设施,由一系列控制点构成,主要用于测量和定位工程项目的各个部分。
在工程测量中,控制网可以提供精确的水平和垂直控制,以确保工程施工的精度和准确度。
同时,工程控制网也是测绘和地理信息系统的基础设施,用于地图制图、地形测量、环境监测等方面。
三、工程控制网优化设计的必要性随着科学技术的发展和工程项目的复杂化,对工程控制网的精度和稳定性要求也越来越高。
然而,传统的工程控制网设计存在一些问题,如控制点过于密集、控制点分布不均匀、控制点传递效率低等。
这些问题导致工程测量成本高、效率低,无法满足现代工程项目的需求。
因此,需要对工程控制网进行优化设计,提高其精度和效率,降低测量成本。
目前,基于GPS和GIS技术的工程控制网优化设计方案已经成为一个研究热点。
四、基于GPS和GIS技术的工程控制网优化设计方案GPS(全球定位系统)和GIS(地理信息系统)是两种现代化的测量技术,它们广泛应用于地理空间数据收集、处理和分析,具有较高的精度和效率。
基于GPS和GIS技术的工程控制网优化设计方案主要包括以下几个方面:1. 控制点选取和布设在工程控制网的优化设计中,首先需要进行控制点的选取和布设。
传统的控制点布设是靠人工判断和摸索,容易出现偏差和误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-
合的机会多于深部,则浅部 SO4 离子、溶解固形物多于深部。 Ca2+离子与岩浆侵入时的热液作用有关,近岩浆的地方热液
第5期
王东亮:GPS 工程控制网网型设计研究
·143·
0;同步环情况1。 表 1 平差成果及点位精度表 A
点名 X 坐标 Y 坐标 ms/mm dx/mm
A001 A002 A003 A004 A005 A006 A007 A008 A009 A010 A011 A012
10734.775 20374.265 10672.905 20728.924 10673.883 20104.363 10314.204 20000.000 10000.000 20000.000 9872.064 20267.577 10095.041 20476.376 10319.379 20566.667 10636.284 20506.288 10427.733 20458.330 10217.015 20369.185 10498.848 20259.216
2 网型分类研究
1 技术说明
通过对某工程项目周围进行实地踏勘、选点、布网、野外 数据采集、内业平差处理的成果以及对成果的分析。在对
2.1 点连式 点连式是工程控制网设计中常用的 1 种方法,对它的观
测成果和平差结果进行统计分析见表 1。控制网图见图 1,闭 合环最大节点数 3;闭合环总数 6;同步环总数 6;异步环总数
GPS 控制网的网型设计的研究中,这里对比较常见的点连
0 引言
近年来随着 GPS 定位技术在工程测量工作中被广泛应 用,使传统的控制测量方式产生了质的改变。在我国测绘生 产中,应用 GPS 测量建立工程控制网已基本取代了传统的 控制网建立方法,利用 GPS 技术建立控制网已成为 1 种主 要技术手段,而研究怎样合理的布设 GPS 控制网对保证控 制网的精度,降低建网费用具有重要意义。
式、边连式和边点混连式这三种形式进行分析研究。这次数 据采集用的是拓扑康的三台套的静态 GPS 接收机,采用三 角形形式进行观测,每站的观测时间为 90 min,采样间隔为 15 s,高度角为 15°,测区情况基本达到要求,有效卫星数、 PDOP 值均达到观测要求。数据处理时以 A005 点为已知点。 内业解算使用的是拓扑康的 pinnacle 平差软件。
度等具有重大的意义。本文通过对布设的 GPS 控制网的观测,对获取的野外数据进行随机软件平差计算,对 GPS
控制网点连式、边连式、边点混连式控制网进行技术、经济、可靠性分析对比,提出合理的 GPS 控制网布设方案。
关键词:GPS;控制网;网型
中图分类号:TD16
文献标识码 A
文章编号:1008-8725(2010)05-0142-03
到了三等的要求,重复基线的精度也符合要求,提高了该控 制网的几何强度和可靠性。这种布网方式,需要的测站数多, 花费的时间多,花费的费用也比较多。比点连式可靠性要强 得多,但在这次测量时,有 2 个观测时段由于数据质量差,就 没有用这 2 组数据,最终导致该控制网不是很完美,可能会 影响到最终的成果质量。 2.3 边点混连式
第 29 卷第 5 期 2010 年5 期
煤炭技术
Coal Technology
Vol.29,No.05 May,2010
GPS 工程控制网网型设计研究
王东亮
(黑龙江省煤田地质 108 勘探队,黑龙江 鸡西 158100)
摘 要:研究如何根据 GPS 原理和作业特点制定 GPS 的布网方案,对减少外业观测劳动强度、提高观测质量和精
控制网图见图 3,闭合环最大节点数 3,闭合环总数 12, 同步环总数 7,异步环总数 5。
图 3 边点混连式网图 1
这组是边点混连式的,该组数据观测成果精度是相当高 的,最弱中误差为 1:78244,且达到了三等的要求。边点混连 相对于点连和边连具有更高的几何精度和更高的可靠性强 度。当然,其花费的时间也要长得多,经费也要相应的高一 些。
图 1 点连式网 通过对平差成果的分析,这组观测数据质量良好,布设 的基线长符合二级标准,平差设置时按一级设置的,获得的数 据已达到了一级甚至更好的标准,比例误差达到了四等的要 求, 最弱边的相对中误差也到了二等的标准 , 其值为 1: 125698。说明点连式在某些时候采用增长观测时间的方法, 可以达到比较高等级的要求,但是它的几何强度还是比较差 的,可靠性不高,它的高精度可能是观测数据闭合环都是同 步观测环所造成的,所以可靠性不高。对于基线长度小于 500 m 的小型 GPS 网, 基线的测量精度与基线的长度无关, 当基线的测量时间为 90 min 时,其精度一般可达 mm 级。所 以在时间和经费宽松的时候,应尽可能的增加重复观测量。 2.2 边连式 边连式这种布网方案也是控制测量中常用的 1 种方法, 这种方法布网比较复杂。 边连式网图见图 2,闭合环最大节点数 3;闭合环总数 33;同步环总数 10;异步环总数 23。平差成果见表 2。
ms/mm
0.089 1.787 2.513 0.000 0.000 2.261 3.684 2.325 1.606 1.982 2.468 2.058
dx/mm
0.072 1.374 2.050 0.000 0.000 1.790 3.200 1.837 1.252 1.567 1.945 1.677
量的精度相对来说是非常高的,它的平差成果都是同步观测
向量构成的,所以它的几何精度和可靠性都非常的差,对于
精度要求不是很高的时候可以用这种方式,它的经济效益相
0.062 1.465 1.862 0.000 0.000 2.353 2.871 1.991 1.456 1.679 2.595 2.461
0.051 1.122 1.522 0.000 0.000 1.947 2.460 1.580 1.116 1.321 2.077 2.035
0.035 0.942 1.072 0.000 0.000 1.323 1.480 1.211 0.935 1.036 1.556 1.384
dy/mm
0.053 1.143 1.453 0.000 0.000 1.382 1.826 1.425 1.006 1.214 1.520 1.193
通过对这组数据的分析,可以看出边连式精度较高,达
通过对以上 5 组数据的对比研究,点连式表面上看是精
度最高的,但可能是 1 种假象,因为 GPS 同步观测的基线向
3 结论
图 2 边连式网图
表 2 平差成果及点位精度表 B
点名
A001 A002 A003 A004 A005 A006 A007 A008 A009 A010 A011 A012
X 坐标 Y 坐标
10734.781 20374.270 10672.912 20728.933 10673.888 20104.364 10314.204 20000.000 10000.000 20000.000 9872.063 20267.580 10095.044 20476.380 10319.387 20566.673 10636.291 20506.289 10427.744 20458.335 10217.020 20369.187 10498.854 20259.219
0.034 0.943 1.111 0.000 0.000 1.446 1.768 1.296 0.959 1.365 1.572 1.476
0.028 0.706 0.908 0.000 0.000 1.186 1.505 1.025 0.727 1.070 1.255 1.219
dy/mm
0.020 0.625 0.641 0.000 0.000 0.828 0.928 0.792 0.625 0.847 0.947 0.833
[5] 卧龙湖煤矿水文地质及防治水工程资料[R].卧龙湖煤矿,20032007.
[6] 卧龙湖煤矿首采区 10 煤层底板灰岩水水质初步分析评价与建 议[R].中国科学技术大学,2007. (责任编辑 徐艳杰)
收稿日期:2009-12-19;修订日期:2010-03-16 作者简介:王东亮(1983-),男,黑龙江鸡西人,助理工程师,2006 年毕业于黑龙江省工程学院地理信息系统专业,现从事测绘 技术工作,Tel:13904676868。
[1] 安徽煤田地质局第三勘探队.安徽省濉溪县卧龙湖煤矿勘探地 质报告[R].2003.
[2] 卧龙湖煤矿首采区三维地震勘探报告[R].煤炭科学研究总院西 安分院,2004.
[3] 卧龙湖煤矿首采区瞬变电磁法勘探成果报告[R].煤炭科学研究 总院西安分院,2006.
[4] 卧龙湖煤矿建井地质文字报告[R].安徽煤田地质局第三勘探队, 2007.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! 结合形成了气体硫化氢,臭鸡蛋气味是硫化氢气体具有的物 作用强于远处,则近处 Ca2+离子从灰岩中分解出来的机会多
理特性。
于远处。
(4)疏放出灰岩水流很快变蓝色,其根本原因为水流中 参考文献:
含有铜元素。在原始水中,铜元素的结合态复杂,与硫较少结 合,多以复合分子的形式结合,不易释放出来。当随着水流流 出铜进入氧化态以后,铜与硫、氧结合性能增强,形成了具有 铜色的矿物质和离子,使得水流变为蓝色、加深为黄绿色。
对于边点混连式针对不同情况做了研究,其平差点名 X 坐标 Y 坐标 ms/mm dx/mm dy/mm
A001 A002 A003 A004 A005 A006 A007 A008 A009 A010 A011 A012