单自由度体系自由振动
单自由度系统的有阻尼自由振动
0.8 (e nTd ) 20 0.16
ln5 20 nTd 20 n 2 n 1 2
由于 很小,ln5 40
ln5 W W ln5 1502 c 2 m k 2 2 40 g st 40 1980 0.122( Ns/cm)
nt
2 t n2 n
C2 e
2 t n2 n
)
代入初始条件 (t 0时 , x x0 , x x 0 )
C1
2 0 ( n n 2 n x ) x0
2 n
2
2 n
; C2
2 0 ( n n 2 n ) x0 x 2 2 n 2 n
可见阻尼使自由振动的周期增大,频率降低。当阻尼小时, 影响很小,如相对阻尼系数为5%时,为1.00125,为20%时, 影响为1.02,因此通常可忽略。
14
振幅的影响: 为价评阻尼对振幅衰减快慢的影响,引入减 幅系数η ,定义为相邻两个振幅的比值。
Ai Aewnti wnti td ewntd Ai 1 Ae
5
也可写成
x Ae nt sin(d t )
2 d n n2
—有阻尼自由振动的圆频率
x 0 , 则 设 t 0 时, x x0 , x
2 2 2 x n ( x nx ) 0 n 2 A x0 0 2 02 ; tg1 0 nx0 n n x
16
例4 如图所示,静载荷P去除后质量块越过平衡位置的最大 位移为10%,求相对阻尼系数。
17
x(t ) e
wnt
0 wn x0 x ( x0 cos wd t sin wd t ) wd
18
2-单自由度自由振动

第2章 单自由度系统自由振动
2.5 具有黏性阻尼的振动系统
31
给出初始条件:t=0时 x x0 , x v0
则可确定系数B和D B v0 ( 2 1)n x0 2n 2 1
D v0 ( 2 1)n x0 2n 2 1
第2章 单自由度系统自由振动
2.5 具有黏性阻尼的振动系统
不大,特别是当阻尼很小(<<1)时,可
以忽略阻尼对振动频率和周期的影响。
第2章 单自由度系统自由振动
2.5 具有黏性阻尼的振动系统
40
2.6 对数衰减率
振幅衰减的快慢程度可用相邻振幅 的比值来表示,称为衰减率或减幅率或 减缩率;也可以用衰减率的自然对数来 表示,称为对数衰减率。
第2章 单自由度系统自由振动
第2章 单自由度系统自由振动
2.3 能量法
22
P15例2-3-2 利用能量法求纯滚动圆盘 系统作微幅振动的固有频率。
第2章 单自由度系统自由振动
2.3 能量法
23
2.4 瑞利法
一般不考虑弹性元件的质量对振动系统的 影响,若这些质量不可忽略的时候,“瑞利法” 的思想,是将这些弹性元件所具有的多个集中 质量或分布质量简化到系统的集中质量上去, 从而变成典型的单自由度振动系统。
T 2 n
周期是系统振动一次所需要的时间,单位 为秒(s)。
周期的倒数称为频率,是系统每秒钟振动 的次数,单位为1/秒(1/s)或赫兹(Hz)。记作 f
f 1 n T 2
第2章 单自由度系统自由振动
2.2 自由振动系统
13
固有频率n和频率 f 只相差常数2,因
此经常通称为固有频率。是振动分析中极
已知质量为m,弹簧的刚 度系数为k。取质量的静平衡 位置为坐标原点,当重物偏离 x 时,利用牛顿定律可得到运 动微分方程:
12.3 单自由度体系的自由振动
各杆EI= 。 【例12-5】试求图示结构的ω。各杆 =C。 】
3l 4 B C D m B y A l l l 4 A l C D l
1
M1 图
解:
δ 11
7l 3 = 12 EI
1 12 EI EI = = 1.309 ω= 3 mδ11 7ml ml 3
All Rights Reserved 重庆大学土木工程学院®
【注二】惯性力 FI = −m&& = maω 2 sin(ωt + α ) = mω 2 y , 注二】 y FI 永远与位移方向一致,在数值上与位移成比例, 永远与位移方向一致,在数值上与位移成比例,其比例系 数为 mω 2 。
All Rights Reserved
重庆大学土木工程学院®
12.3.4 自振周期与自振频率
1.自振周期 自振周期 因
y = a sin (ωt + α ) = a sin (ωt + α + 2 π ) 2π = a sin ω t + + α = a sin[ω (t + T ) + α ] ω
所以自振周期
T =
2π
ω
表示体系振动一次所需要的时间,其单位为 ( 表示体系振动一次所需要的时间,其单位为s(秒) 。
式中, 为重力加速度 为重力加速度; 式中,g为重力加速度;W=mg为质点 为质点 的重力; 表示将重力W=mg 的重力;∆st=Wk11,表示将重力 施加于振动方向所产生的静位移。 施加于振动方向所产生的静位移。
All Rights Reserved 重庆大学土木工程学院®
T = 2π ∆st g
All Rights Reserved 重庆大学土木工程学院®
结构力学-单自由度体系的自由振动

mh3 T 2 24 EI
Vibration Characteristic
y(t ) Asin( t )
Acceleration: Inertia Force:
(t ) A 2 sin(t ) y (t ) mA 2 sin(t ) I (t ) m y
这是一个齐次方程,其通解为
y(t ) C1 cost C2 sin t
C1 和 C2 可由初始条件确定,设初始位移和初始速度分别为
y(0) y0 C1 y0
(0) v0 y
C2
v0
v0
,
y (t ) y0 cos t
sin t
y (t ) y0 cos t
在无阻尼自由振动中,位移、加速度和惯性力都按正弦规律
变化,且作相位相同的同步运动,即它们在同一时刻均达极值,
而且惯性力的方向与位移的方向一致。
幅值产生于
sin(t ) 1 时,其值分别为:
y A
A 2 y
I mA
2
由于在运动的任一瞬时质体都处于平衡状态,在幅值出现时
l
1 m
EA ml
st Wl T 2 2 g EAg
例: 求图示结构自振频率 。(EI 为常数,杆件自身 质量不计) [分析] 图乘法求位移
A m C l h
1 1 2 2 1 2 h2 B ( h h hl h) (h l ) EI 2 3 2 3 3EI
y y
v0
sin t
T
0
t
y cos t
-y
y
单自由度系统(自由振动)
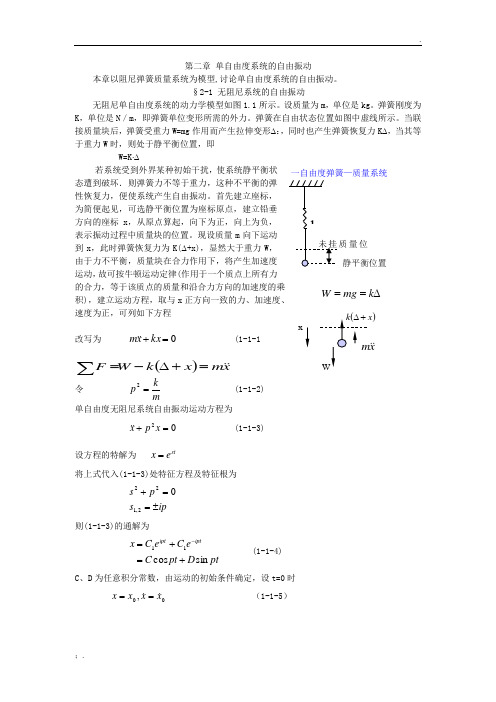
第二章 单自由度系统的自由振动本章以阻尼弹簧质量系统为模型,讨论单自由度系统的自由振动。
§2-1 无阻尼系统的自由振动无阻尼单自由度系统的动力学模型如图1.1所示。
设质量为m ,单位是kg 。
弹簧刚度为K ,单位是N /m ,即弹簧单位变形所需的外力。
弹簧在自由状态位置如图中虚线所示。
当联接质量块后,弹簧受重力W=mg 作用而产生拉伸变形∆:,同时也产生弹簧恢复力K ∆,当其等于重力W 时,则处于静平衡位置,即 W=K ⋅∆若系统受到外界某种初始干扰,使系统静平衡状态遭到破坏.则弹簧力不等于重力,这种不平衡的弹性恢复力,便使系统产生自由振动。
首先建立座标,为简便起见,可选静平衡位置为座标原点,建立铅垂方向的座标x ,从原点算起,向下为正,向上为负,表示振动过程中质量块的位置。
现设质量m 向下运动到x ,此时弹簧恢复力为K(∆+x),显然大于重力W ,由于力不平衡,质量块在合力作用下,将产生加速度运动,故可按牛顿运动定律(作用于一个质点上所有力的合力,等于该质点的质量和沿合力方向的加速度的乘积),建立运动方程,取与x 正方向一致的力、加速度、速度为正,可列如下方程 改写为 0=+kx xm (1-1-1 令mkp =2(1-1-2)单自由度无阻尼系统自由振动运动方程为02=+x p x(1-1-3)设方程的特解为 ste x =将上式代入(1-1-3)处特征方程及特征根为ips p s ±==+2,1220则(1-1-3)的通解为ptD pt C e C e C x ipt ipt sin cos 11+=+=- (1-1-4)C 、D 为任意积分常数,由运动的初始条件确定,设t=0时00,x xx x == (1-1-5)()x m x k W F=+∆-=∑量位静平衡位置 一自由度弹簧—质量系统 ∆==k mgW xx)则pt pxpt x x sin cos 00 += (1-1-6)经三角变换,又可表示为)sin(α+=pt A x(1-1-7)其中 001220,x px tg p x x A -=⎪⎪⎭⎫ ⎝⎛+=α (1-1-8) 自由振动的振幅A 和初相位角α与系统的参数和初始条件有关。
第二章单自由度系统的自由振动

可见动张力几乎是静张力的一半,由于
v kA k v km wn
因而为了降低动张力,应该降低系统的刚度
15
例2.2 图示的直升机桨 叶经实验测出其质量 为m,质心C距铰中心 O距离为l。现给予桨 叶初始扰动,使其微 幅摆动,用秒表测得 多次摆动循环所用的 时间,除以循环次数 获得近似的固有周期, 试求桨叶绕垂直铰O的 转动惯量。
第二章 单自由度系统的自由振动
以弹簧质量系统为力学模型,讨论单自由度 无阻尼系统的固有振动和自由振动, • 固有振动的表现形式为简谐振动,其固有频率 的计算方法有静变形法、能量法、瑞利法以及 等效刚度、等效质量法 • 有阻尼的系统根据阻尼的大小分为过阻尼、临 界阻尼及欠阻尼三种状态
1
单自由度系统的自由振动
一、自由振动的概念:
以弹簧质量系统为力学模型
2
运动过程中,总指向物体平衡位置的力称为恢复力。 物体受到初干扰后,仅在系统的恢复力作用下在其平衡位 置附近的振动称为无阻尼自由振动。 质量—弹簧系统: 令x为位移,以质量块的静平衡位置 为坐标原点,当系统受干扰时,有:
m mg k (s x) x
O l C mg
16
解:取图示坐标系,将直升机桨叶视为一物 理摆,根据绕固定铰的动量矩定理得到其 摆动微分方程
J 0 mgl sin
O l C mg
sin
n
mgl , J0
J0 mgl 0
J0 Tn 2 mgl
mgl J0 2 Tn2 4
m Tn 2 n k 2
固有周期
k / m g / s
10
固有频率及固有周期
k g wn m s
对于不易得到刚度或质量的系统, 若能测出静变形,可用上式计算固有频率。
单自由度体系的自由振动
令
ω2 = k
m
y + ω 2 y = 0
运动方程的解 y + ω 2 y = 0 可由振动的初 2
始条件来确定
常系数的线性齐次微分方程,其通解为
y(t) = A1 cosωt + A2 sinωt
若当 t = 0 时 y = y0 初位移
y(0) = y0 = A1 cosω × 0 + A2 sin ω × 0
因此,自振周期(或频率)的计算十分重 要。
例 计算自振频率
14
EI=常数
如果让振动体系沿振动方向发生单位位移时,所有刚 结点都不能发生转动(如横梁刚度为无穷大的刚架) 计算刚度系数方便。
两端刚结的杆的侧移刚度为:12EI
l3
一端铰结的杆的侧移刚度为:3EI
l3
例 计算自振频率
1
k11
EI=常数
12 EI l3
y = y0 初速度
y(0) = y0 = −ωA1 sinω × 0 + ωA2 cosω × 0
A1 = y0
A2
=
y0
ω
y(t)
=
y0
cosωt
+
y0
ω
sin ωt
位移的多项表达式
位移、速度的单项表达式
3
y(t)
=
y0
cosωt
+
y0
ω
sin ωt
若令
y(t) = a sinϕ cosωt + a cosϕ sin ωt
结构自振周期、频率
6
自振周期的倒数称为工程频率 f = 1
(或频率),记作 f
T
频率 f 表示单位时间内的振动次数,其常用单位
单自由度系统的自由振动
固有频率的计算方法
1. 建立微分方程求固有频率 2. 静位移法 3. 能量法
单自由度系统的自由振动 / 无阻尼自由振动
静位移法——求解固有频率
单自由度系统的自由振动 / 无阻尼自由振动 能量法——求解固有频率
单自由度系统的自由振动 / 无阻尼自由振动
特征方程及特征根为
2 s 2 0 0
s1, 2 i0
则式(1-1)的通解为
y e x (c1 cos x c2 sin x)
x C1 cos 0t C2 sin 0t
C1 / C2 为任意积分常数,由运动的初始条件确定。
单自由度系统的自由振动 / 无阻尼自由振动
临界阻尼系数 cc
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
2 0 x x0
当作微幅振动时,可认为sin , cos 1。再由静平衡条件 mgl st ka 则上式可简化为
a 2k 引入符号 2 ,则上式变为 ml
2 0
(1-2)
此为单自由度系统无阻尼自由扭振的微分方程,其解同例(1)。
单自由度系统的自由振动 / 无阻尼自由振动
单自由度系统的自由振动 / 无阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度系统的自由振动 / 阻尼自由振动
单自由度体系的自由振动

2 T
计算频率和周期的几种形式
k 1 g g m m W st
m st T 2 2 k g
频率 1.只与结构的质量与刚度有关,与外界干扰无关; 和周 2.T与m的平方根成正比,与k成反比,据此可改变周期; 期的 6 讨论 3.是结构动力特性的重要数量标志。
m ky m
.
y
k
m
y( t )
m
y
k
单自由度体系自由 振动的微分方程
m y
ky 0 m y
2
二、自由振动微分方程的解
改写为
ky 0 m y k y 0 y m
.......... .......... .......... ......(a)
k y 0 其中 y m
例1. 计算图示结构的频率和周期。 例2.计算图示结构的水平和竖向振动频率。 H 1 m EI m 1
V
l /2 1
l /2 A,E,I
E,I
E,A
l3 48EI m l3 T 2 3 48EI ml 48EI
例3.计算图示刚架的频率和周期。
m EI1= I I h
6 EI h2
l/2
解:1)求δ
l3 1 48EI
l/2
3 l/ 16
l/2
l/2
P=1
l/2
l/2
7 l 3 5 l/ 2 32 768EI P=1 l/ 2
l3 3 192EI
1
1 m 1
48EI ml3
3 1l 768 EI 1 192EI 1 l 3 l l 5 l 7 l 2 2 (2 3 3 ) 1 3 ml 2 32 768 m EI 62 2 7 16 EI ml m 3
第五章 单自由度系统的振动

上式也可改写为
F (t ) c0 ck cos(kt k )
式中
c0 a 0 / 2 ck ak2 bk2 bk k arct an ak
Cx Kx c0 ck cos(kt k ) M x
k 1
k 1
若系统的质量、刚度和阻尼分别为M、K和C,则此时受迫振动的微分方程为
c0相当于一个静载荷,它不引起振动,而只改变系统的静平衡位置。若令
k k
则稳态响应可以写为
ck x k cos(k t k k ) k 1 K
x e ( x0 cosd t
at
也可改写为 式中
d x Aeat sin(d t )
0 ax0 x
0 ax0 x
sin d t )
2 A x0 (
d
)2
arctan
d x0
0 ax0 x
从上面的式子可以看出,这时系统的运动为周期性的振动。其 振动圆频率为d ,称为有阻尼振动的固有频率,它比无阻尼自由振 动的固有频率 n 略小。振幅Ae-at随时间成指数形式衰减。如图给 出了这种衰减振动的响应曲线。
x A sin(nt )
式中:A称为振幅; 称为初相位,单位为rad。 无阻尼自由振动是一个以固有频率为频率的简谐振动。
设初始时刻t=0时的位移为x0、速度为v0,则可得
2 A x0 (v0 / 0 ) 2
x00 arctan 0 x
2、工程实例 机器或结构中的构件受一静负荷后要产生变形,其内 部要产生应力,分别称为静变形和静应力。而当受冲击或 产生振动时,构件要产生动变形和动应力。
振动理论-第2章 单自由度系统的自由振动

c
l
解:梁重物处的静变形为
st
Wc2 (l c)2 3lEI
则:
3lEI k c2 (l c)2
1g f
2 st
例3. 已知:升降机吊笼,以等速 v0 下降,钢丝绳视为弹簧,
若A端突然停止,求钢绳所受到的最大应力。
W 10000lbf l 62 ft A 2.5in2 E 15106lbf / in2
4 等效质量和等效刚度
4 等效质量和等效刚度
4 等效质量和等效刚度
4 等效质量和等效刚度
4 等效质量和等效刚度
平行串联、并联弹簧的等效刚度
4 等效质量和等效刚度
平行串联、并联弹簧的等效刚度
4 等效质量和等效刚度
例1 A suspension system of a freight truck with a parallel-spring arrangement. Find the equivalent spring constant of the suspension if each of the three helical springs is made of G 80109 N / m2
(boom) to deform by an amount x2 x cos 45 and the spring k1
Eat 3 4b3
kr
AE l
d2E
4l
1 keq
1 kb
1 kr
4b3 Eat 3
4l d2
E
keq
E 4
at3d 2
d 2b3 lat3
4 等效质量和等效刚度
斜拉弹簧在某个位移方向上的等效弹簧刚度
Fx F cos F 为弹簧的伸长量
03第三讲:单自由度系统的自由振动和强迫振动
自振周期和频率
k 1 w2 m md
(2)利用机械能守恒 (2) 利用机械能守恒
注意到
W mg Dst Wd
w2
g g Wd D st
EI EI
m
l
=1
d 11
l
T (t ) U (t ) 常数
Tmax U max
U (t ) 1 2 1 ky (t ) kA2 sin 2 (wt ) 2 2
计算频率和周期的几种形式
w
k 1 g m md Wd
g D st
T 2
m D st 2 k g
第三讲:单自由度系统的自由振动和强迫振动
一、无阻尼自由振动问题
频率和周期的计算方法
(1)利用计算公式 (1) 利用计算公式
第三讲:单自由度系统的自由振动和强迫振动
一、无阻尼自由振动问题 例.求图示体系的自振频率和周期.
单自由度体系对简谐荷载作用下的反应是结构动力学中的一个经典内容。 自由振动:体系在振动过程中没有动荷载的作用。 自由振动产生原因:体系在初始时刻(t=0)受到外界的干扰。
第三讲:单自由度系统的自由振动和强迫振动
一、无阻尼自由振动问题
1、 刚度法:研究作用于被隔离质量上的受力状 态,建立(动)平衡方程。 静平衡位置
2
cv kv 0 mv
特征方程:
2
c s sw2 0 m
当根式中的值为零时,对应的阻尼值称为临界阻尼,记作cc。显然, 应有cc/2m=w,即:
cc 2m w
2
∵
c 0则:
s
c c w 2 2m 2m
这时,对应的s 值为 :
单自由度系统的自由振动

频率:ω; 幅值:A; 初始相位:t=0时矢量与坐 标轴的夹角。 y Asin(t )
1.两个(或两个以上)同频 率简谐振动的合成。
2.直观表示简谐振动位
x Acos(t )
移.速度.及加速度之间的 相对关系。
旋转矢量表示法—旋转矢量投影法
y
1.两个(或两个以上)同频
率简谐振动的合成。
A
A2
2
ω
φ A1
1
O
x
2.直观表示简谐振动位 移.速度.及加速度之 间的相对关系。
y
x
ωA
Ax
ω O
x ω A2
φ
x
复数表示法
长度为A的矢量以匀角速度ω在复平面上绕定点O逆时 针旋转,该矢量在实轴及虚轴上的投影与矢量端点处 复数z的实部和虚部相对应。
单自由度系统自由振动方程
x
2 0
x
0
0 k / m
单自由度系统自由振动方程的解 说明什么?
x C1 cos0t C2 sin 0t x Asin(0t )
无阻尼自由振动是以平衡位置为中心的简谐振动
振动角频率ω0是系统的固有特性,与初始条件无关
固有频率及 固有周期
f 0 1 2 2
k m
T0
1 f
2
m k
固有频率
x C1 cos0t C2 sin 0t
x Asin(0t )
ω0称作无阻尼系统的固有(角)频率,单位为 rad/s
0 k / m
固有频率及 固有周期
结构振动理论2-单自由度系统自由振动

由 dE 0 1、求出运动方程: mx kx 0
dt
有常力作用的机械能: E 1 mx&2 1 k( x)2 Fx
2
2
dE mx&&x& k( x)x& Fx& x&(m&x& kx) 0
dt
由 Ek max E p max E 2、求固有频率
假设 x Asin( pt ) 则 x Apcos(pt )
2
l 0
/
2
y02{3(
x l
)
4(
x l
)3}2
dx
1 2
0.486
ly02
Ek
1 2
me
y02
me 0.486 l
n
ke me
00:03
单自由度系统自由振动
例 铰接式直升机旋翼挥舞振动分析
取微元做受力分析,微元
cos
R
L
2(R cos)d 离心力对铰链轴o的力矩为
θ
ξ
(2 (R cos )d )( sin )
则系统的自由振动方程为: me ke 0
固有频率为:
n
ke me
需要注意的是,me不是梁的总质量,它可以通过梁上各 点位移关系和动能等效的原则求得。
00:03
单自由度系统自由振动
y( x, t )
y0
(t
)[3x l
4(
x )3 ] l
(x 1) l2
Ek
1 2
l y2dm 1 2
0
由此可见,弹性元件并联将提高总刚度,串联将降低总刚
度。这与电学中电阻的并联、串联结论是相反的。阻尼器串联
单自由度体系自由振动,速度相位与位移相位的关系

单自由度体系(Single Degree of Freedom System, SDOF)是工程动力学中的一个重要概念,它对于描述系统的振动特性有着重要的作用。
在自由振动过程中,速度相位与位移相位之间存在着密切的关系。
本文将从单自由度体系自由振动的基本原理入手,探讨速度相位与位移相位之间的关系,希望通过本文的介绍,读者能够对这一问题有更加清晰的认识。
一、单自由度体系自由振动的基本原理1. 自由振动的基本概念自由振动是指在没有外界干扰的情况下,系统在一定的初位移或初速度作用下,由于其自身的惯性和弹性特性而产生的振动现象。
在工程领域中,自由振动是一种非常常见的振动形式,因此研究自由振动对于工程设计和分析有着重要的意义。
2. 单自由度体系的定义单自由度体系是指系统中只有一个自由度可以自由变化的体系。
在动力学领域中,单自由度体系被广泛应用于描述各种机械、土木和航空航天结构的振动特性。
它是一种简化模型,但对于许多实际工程问题的分析具有较高的适用性。
3. 自由振动的基本方程单自由度体系的自由振动可以通过一阶微分方程来描述。
其基本方程可以表示为:\[m\ddot{x}+c\dot{x}+kx=0\]其中,\(m\)为系统的质量,\(c\)为系统的阻尼系数,\(k\)为系统的刚度,\(x\)为系统的位移函数,\(t\)为时间。
二、速度相位与位移相位的定义1. 速度相位的定义在振动过程中,速度相位是指速度\(v\)相对于位移\(x\)的相位差。
通常用一个角度来表示,它可以用来描述振动的快慢和超前滞后关系。
2. 位移相位的定义位移相位是指位移\(x\)相对于某一固定参考点的相位差。
它也通常用一个角度来表示,可以用来描述振动的相对位置。
三、速度相位与位移相位的关系速度相位与位移相位之间存在着密切的关系。
在自由振动过程中,它们之间满足以下关系:\[tan(\phi_v-\phi_x)=\frac{2\zeta}{1-\omega^2}\]其中,\(\phi_v\)为速度相位,\(\phi_x\)为位移相位,\(\zeta\)为系统的阻尼比,\(\omega\)为系统的固有频率。
第三节单自由度体系的自由振动

yk 1 e 2 (0.05) e0.周期后的振幅比前者约减少27%。
(4)阻尼比 值的测算
若用yk和yk+n表示相隔n个周期的两个振幅,它们的比值为
yk e nT e2n yk n
将上式两边取对数,得
ln yk 2n
yk n
则
1 ln yk
y(t) 2 y(t) 2 y(t) 0 y(t) Cert
代入运动方程,可得确定r的特征方程
r 2 2 r 2 0
其两个根为 于是一般解为
r1,2 ( 2 1)
(d)
y(t) C1e r1t C 2e r2t
方程的解取决于式(d)中根号内的数值。现分三种情况讨论。
1. <1(小阻尼情况)
kg
c 2m 2 81057 5 0.029 73848 kg/s
y0 e5T (eT )5 ( y0 )5
y5
y1
y5
y0 ( y0 )5
0.6 ( 0.6 )5
0.241cm
y1
0.5
y(0) v0
可求出 C1 y0 ,
C2
v0
代入上式,得到质点位移
y(t)
y0
cost
v0
sin t
由上式可知,自由振动由两部分 组成:一部分是由初始位移y0引 起的,质点按余弦规律振动,如 图 a所示;另一部分是由初始速 度v0引起的,质点按正弦规律振
动,如图b所示。两项均为简谐
函数,其合成运动仍为简谐运动,
得
C1 y0 ,
C2
v0
y0
故
y(t)
e t
(
y0
cost
v0
y0
sin
单自由度体系自由振动

单自由度体系自由振动一、无阻尼振动单自由度体系自由振动可分为有阻尼和无阻尼振动两种。
在模型建立过程当中,可以直接进行建立。
在运行时,只需将c=0即可。
ω增加,单位时间内振动次数增加。
无阻尼振动是简谐振动,振幅和初相位仅取决于初位移和速度。
初始干扰反映了外部初始赋予体系能量的大小。
由于不考虑振动过程中体系能量的耗散,因而体系的总能量保持不变,这就表现为振幅A保持不变,永不衰减。
于是振动一旦发生便永不停息,但这仅是一种理想状态。
二、对阻尼自由振动的讨论当阻尼系数c不为0时,体系做阻尼运动。
由于有能量的耗散,体系的运动幅度会逐渐减小,最终停止振动。
有阻尼单自由度体系,自由振动的运动方程为ωξωm c m k t ky t y c t y m 2,0)()()(2===++∙∙∙, 则原式可变为022=++∙∙∙ωξωy y 。
解微分方程有如下结果:2.1 当1<ξ时,即小阻尼运动,方程的解为:)sin(A )sin cos ()(000ϕωωωξωωξωξω+=++=--t e t y v t y e t y d t d d d t 其中2200201)(ξωωωξω-=++=d d y v y A可画出小阻尼体系自由振动时的y-t曲线如图所示:是一条逐渐衰减的波动曲线2.2 当1>ξ时,即大阻尼的情况,方程的解为:⎥⎥⎦⎤⎢⎢⎣⎡-+--+=-t ch y t sh v y e t y o t ωξωξξξωωξ11)1()(20220 上式不含有简谐振动的因子,是因为体系受干扰后偏离平衡位置所积蓄起来的初始能量在恢复平衡位置的过程中全部消耗克服阻尼,由于阻尼很大,不足以引起振动。
当初始速度,初始位移都大于0时,可画出大阻尼体系自由振动时的y-t曲线如图所示:2.3 当1=ξ时,即临界阻尼的情况,方程的解为:[]t v t y e t y t 00)1)(++=-ωω(当初始速度,初始位移都大于0时,可画出临界阻尼体系自由振动时的y-t曲线如下图所示;当体系在临界阻尼时,其运动衰减的最快,即他能在最短时间内无振动的回到平衡位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单自由度体系自由振动
一、无阻尼振动
单自由度体系自由振动可分为有阻尼和无阻尼振动两种。
在模型建立过程当中,可以直接进行建立。
在运行时,只需将c=0即可。
ω增加,单位时间内振动次数增加。
无阻尼振动是简谐振动,振幅和初相位仅取决于初位移和速度。
初始干扰反映了外部初始赋予体系能量的大小。
由于不考虑振动过程中体系能量的耗散,因而体系的总能量保持不变,这就表现为振幅A保持不变,永不衰减。
于是振动一旦发生便永不停息,但这仅是一种理想状态。
二、对阻尼自由振动的讨论
当阻尼系数c不为0时,体系做阻尼运动。
由于有能量的耗散,体系的运动幅度会逐渐减小,最终停止振动。
有阻尼单自由度体系,自由振动的运动方程为
ω
ξωm c m k t ky t y c t y m 2,0)()()(2===++∙∙∙, 则原式可变为022=++∙
∙∙ωξωy y 。
解微分方程有如下结果:
2.1 当1<ξ时,即小阻尼运动,方程的解为:
)sin(A )sin cos ()(000ϕωωωξωωξωξω+=++
=--t e t y v t y e t y d t d d d t 其中2
20
0201)(ξωωωξω-=++=d d y v y A
可画出小阻尼体系自由振动时的y-t曲线如图所示:是一条逐渐衰减的波
动曲线
2.2 当1>ξ时,即大阻尼的情况,方程的解为:
⎥⎥⎦
⎤⎢⎢⎣⎡-+--+=-t ch y t sh v y e t y o t ωξωξξξωωξ11)1()(20220 上式不含有简谐振动的因子,是因为体系受干扰后偏离平衡位置所积蓄起来的初始能量在恢复平衡位置的过程中全部消耗克服阻尼,由于阻尼很大,不足以引起振动。
当初始速度,初始位移都大于0时,可画出大阻尼体系自由振动时的y-t曲线如图所示:
2.3 当1=ξ时,即临界阻尼的情况,方程的解为:
[]t v t y e t y t 00)1)(++=-ωω(
当初始速度,初始位移都大于0时,可画出临界阻尼体系自由振动时的y-t曲线如下图所示;当体系在临界阻尼时,其运动衰减的最快,即他能在最短时间内无振动的回到平衡位置。
三、将四种振动形式综合即为下图:。