【VIP专享】弹塑性力学第一章38
弹塑性力学-陈明祥版的-课后习题答案++教学内容
陈明祥
中国地质大学 力学教研室
第一章 绪 论
一、 学科分类 ·弹塑性力学 二、 弹塑性力学的研究对象 三、 弹塑性力学的基本思路与研究方法 四、 弹塑性力学的基本任务 五、 弹塑性力学基本假设 六、 弹塑性力学发展概况 七、张量概念及其基本运算
● 按研究对象分:
◆ 一般力学: 研究对象是刚体。研究力及其与
(3) 力与变形间的本构关系 (物理分析)
固体材料受力作用必然产生相应的变形。 不同的材料,不同的变形,就有相应不同的 物理关系。
◆ 弹塑性力学研究问题的基本方法
以受力物 体内某一 点(单元 体)为研 究对象
单元体的受力—— 应力理论;
单元体的变形—— 变形几何理论;
单元体受力与变形
间的关系——本构理 论;
弹塑性力学与材料力学同属固体力学的 分支学科,它们在分析问题解决问题的基本 思路上都是一致的,但在研究问题的基本方 法上各不相同。其基本思路如下:
(1) 受力分析及静力平衡条件 (力的分析)
物体受力作用处于平衡状态,应当满足的条件 是什么?(静力平衡条件)
(2) 变形的几何相容条件 (几何分析)
材料是均匀连续的,在受力变形后仍应是连续 的。固体内既不产生“裂隙”,也不产生“重叠 ”, 此时材料变形应满足的条件是什么?(几何相 容条件)
不考虑因变形而引起的力作用线方向的改变; (B)在研究问题的过程中可以略去相关的二次及二
次以上的高阶微量;
从而使得平衡条件与几何变形条件线性化。
六、弹塑性力学发展概况
◆ 1678年英国科学家虎克(R.Hooke)提出 了固体材 料的弹性变形与所受外力成正比——虎克定律。
◆ 19世纪20年代,法国科学家纳维叶 ( C.L.M.H.Navier )、柯西 ( A.L.Cauchy )和 圣文南 ( A.J.C.B.Saint Venant ) 等建立了 弹性力学的理论基础。
弹塑性力学第01章

学习目的
弹性力学的研究方法决定了它是一门基础理论课程,而 且理论直接用于分析工程问题具有很大的困难。原因主要是 它的基本方程-偏微分方程边值问题数学上求解的困难。由 于经典的解析方法很难用于工程构件分析,因此探讨近似解 法是弹性力学发展中的特色。近似求解方法,如差分法和变 分法等,特别是随着计算机的广泛应用而发展的有限元方法, 为弹性力学的发展和解决工程实际问题开辟了广阔的前景。 弹性力学课程的主要学习目的是使学生掌握分析弹性体 应力和变形的基本方法,为今后进一步的研究实际工程构件 和结构的强度、刚度、可靠性、断裂和疲劳等固体力学问题 建立必要的理论基础。
钱学森,著名科学家。我国 近代力学事业的奠基人之一。 在空气动力学、航空工程、 喷气推进、工程控制论、物 理力学等技术科学领域做出 许多开创性贡献。为我国火 箭、导弹和航天事业的创建 与发展做出了卓越贡献,是 我国系统工程理论与应用研 究的倡导人。1991年10月 16日,国务院、中央军委 授予钱学森"国家杰出贡献 科学家"荣誉称号和一级英 雄模范奖章。
粘弹性?
§1-2 弹塑性力学的研究内容
弹塑性力学是固体力学的一个重要分支, 是研究弹性和弹塑性物体变形规律的一门学 科,它推理严谨,计算结果准确,是分析和 解决许多工程技术问题的基础和依据。
目录
CH1 绪论 CH2 弹性力学基本理论 CH3 弹性力学平面问题 CH4 弹性力学空间问题 CH5 薄板的小挠度弯曲 CH6 弹性力学问题的变 分解法 CH7 简单应力状态下的弹 塑性问题 CH8 应力应变分析和屈服 条件 CH9 塑性本构关系 CH10 简单弹塑性问题 CH11 理想刚塑性体的平 面应变问题 CH12 结构的塑性极限分 析
弹塑性力学第一章
1.4 弹塑性力学发展史
1.弹性力学发展史 古代弓箭的例子 共分四个时期: 第一时期(初期):1678年,虎克定律; 第二时期: 十七世纪末,只要研究梁; 1822年-1828年,法国柯西提出了应力、应变概念 ,建立了弹性力学三大方程;
1.4 弹塑性力学发展史
第三时期:广泛用于解决工程问题 1855年,法国圣维南发表了关于柱体扭转和弯曲 的论文; 1881年,德国赫兹解决了两弹性体局部接触问题 ; 1898年,德国基尔施发现了圆孔处的应力集中问 题; ……………………………………. 建立了能量原理,发展了许多实用的计算方法。
1.4 弹塑性力学发展史
二十世纪二十年代起,发展了一些边缘学 科:
非线性板壳理论 热弹性力学 力学 气动弹性力学、水弹性 磁弹性力学
1.4 弹塑性力学发展史
2.塑性力学发展史 1864年,Tresca提出了最大剪应力屈服准则, 二十世纪初,证实了此准则; 1904年及1913年,Huber和Mises提出了Mises屈 服准则; 1923年,Nadai研究了柱体扭转; 1950年,开始研究塑性本构关系;
1.6 下标记号法和求和约定
2.求和约定 在一项中,有一个下标出现两次,则对 此下标从1至3求和,并限定同一项中不能有 同一下标出现三次或三次以上。
ai bi ai bi a1b1 a2b2 a3b3
i 1
3
aii aii a11 a22 a33
i 1
3
继续研究塑性本构关系 之后,分为两大分支: 数值计算方法的研究
1.5 简化模型
简化模型的特点: (1)比较真实地反映材料的真实特性; (2)便于计算及理论研究。 根据有无明显的屈服阶段,分为两大类: 理想塑性模型 强化模型
弹塑性力学第一章弹塑性力学绪论资料
1、弹塑性本构关系
本构关系是指材料内任意一点的应力-应变之间的关 系,是材料本身的物理特性所决定的。弹性本构关系 是广义胡克定律,而塑性本构关系远比弹性本构关系 复杂。在不同的加载条件下要服从不同的塑性本构关 系。塑性本构关系有增量理论和全量理论。
6
2.研究荷载作用下物体内任意一点的应力和变形 在荷载作用下,物体内会产生内力,因此通常
广泛地探讨了许多复杂的问题,出现了许多边缘分支:
各向异性和非均匀体的理论,非线性板壳理论和非线性
弹性力学,考虑温度影响的热弹性力学,研究固体同气
体和液体相互作用的气动弹性力学和水弹性理论以及粘
弹性理论等。磁弹性和微结构弹性理论也开始建立起来。
此外,还建立了弹性力学广义变分原理。这些新领域的
发展,丰富了弹性力学的内容,促进了有关工程技术的
弹塑性力学
1
第一章 绪 论
§1-1 弹塑性力学基本概念和主要任务 §1-2 弹塑性力学的发展史
§1-3 基本假设及试验资料 §1-4 简化模型
2
1.1 弹塑性力学基本概念和主要任务
一、弹性(塑性)变形,弹性(塑性)阶段
可变形固体在外力作用下将发生变形。根据变形 的特点,固体在受力过程中的力学行为可分为两个明 显不同的阶段:当外力小于某一极限值(通常称为弹 性极限荷载)时,在引起变形的外力卸除后,固体能 完全恢复原来的形状,这种能恢复的变形称为弹性变 形,固体只产生弹性变形的阶段称为弹性阶段;外力 超过弹性极限荷载,这时再卸除荷载,固体将不能恢 复原状,其中有一部分不能消失的变形被保留下来, 这种保留下来的永久变形就称为塑性变形,这一阶段 称为塑性阶段。
10
在这个时期,弹性力学的一般理论也有很大的发展。
弹塑性力学课后习题答案
七、张量概念及其基本运算(附录一)
1、张量概念
◆ 张量分析是研究固体力学、流体力学及连续介 质力学的重要数学工具 。
◆ 张量分析具有高度概括、形式简洁的特点。
◆ 任一物理现象都是按照一定的客观规律进行的, 它们是不以人们的意志为转移的。
不考虑因变形而引起的力作用线方向的改变; (B)在研究问题的过程中可以略去相关的二次及二
次以上的高阶微量;
从而使得平衡条件与几何变形条件线性化。
六、弹塑性力学发展概况
◆ 1678年英国科学家虎克(R.Hooke)提出 了固体材 料的弹性变形与所受外力成正比——虎克定律。
◆ 19世纪20年代,法国科学家纳维叶 ( C.L.M.H.Navier )、柯西 ( A.L.Cauchy )和 圣文南 ( A.J.C.B.Saint Venant ) 等建立了 弹性力学的理论基础。
二、 弹塑性力学的研究对象
在研究对象上,材料力学的研究对象是固 体,且基本上是各种杆件,即所谓一维构件。
弹塑性力学研究对象也是固体,是不受 几何尺寸与形态限制的能适应各种工程技术 问题需求的物体。
造成两者间这种差异的根本原因是什么呢?
三、弹塑性力学的基本思路与研究方法
1、弹塑性力学分析问题的基本思路
弹塑性力学课后习题答案
第一章 绪 论
一、 学科分类 ·弹塑性力学 二、 弹塑性力学的研究对象 三、 弹塑性力学的基本思路与研究方法 四、 弹塑性力学的基本任务 五、 弹塑性力学基本假设 六、 弹塑性力学发展概况 七、张量概念及其基本运算
一、学科分类 ·弹塑性力学
1、学科分类
按运动与否分:
弹塑性力学第一章
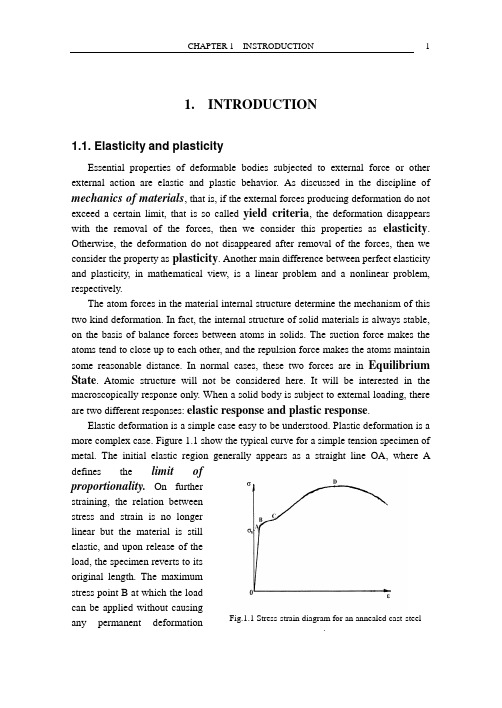
1. INTRODUCTION1.1. Elasticity and plasticityEssential properties of deformable bodies subjected to external force or other external action are elastic and plastic behavior. As discussed in the discipline of mechanics of materials, that is, if the external forces producing deformation do not exceed a certain limit, that is so called yield criteria, the deformation disappears with the removal of the forces, then we consider this properties as elasticity. Otherwise, the deformation do not disappeared after removal of the forces, then we consider the property as plasticity. Another main difference between perfect elasticity and plasticity, in mathematical view, is a linear problem and a nonlinear problem, respectively.The atom forces in the material internal structure determine the mechanism of this two kind deformation. In fact, the internal structure of solid materials is always stable, on the basis of balance forces between atoms in solids. The suction force makes the atoms tend to close up to each other, and the repulsion force makes the atoms maintain some reasonable distance. In normal cases, these two forces are in Equilibrium State. Atomic structure will not be considered here. It will be interested in the macroscopically response only. When a solid body is subject to external loading, there are two different responses: elastic response and plastic response.Elastic deformation is a simple case easy to be understood. Plastic deformation is a more complex case. Figure 1.1 show the typical curve for a simple tension specimen of metal. The initial elastic region generally appears as a straight line OA, where Adefines the limit ofproportionality.On furtherstraining, the relation betweenstress and strain is no longerlinear but the material is stillelastic, and upon release of theload, the specimen reverts to itsoriginal length. The maximumstress point B at which the loadcan be applied without causingany permanent deformation Fig.1.1 Stress-strain diagram for an annealed cast-steelspecimen.(a) (b) (c) (d)Fig. 1.2 Stress-strain diagrams: (a) ductile metal, (b) cast iron and glass, (c) typical concrete or rock,(d) soils, triaxial compression. (Experimental data taken from reference [15].)defines the elastic limit . The point B is also called the yield point , for it marks the initiation of plastic or irreversible deformation. Usually, there is very little difference between the proportional limit, A, and the elastic limit, B. The behavior in the flat region BC is generally referer to as plastic flow . After C the material is exhibited strain hardening or also known as work hardening. Over some point D the material may be exhibit strain softening, as shown in figure 1.1.Now, consider the unloading from some point E beyond the yield point. The behavior is as indicated in figure 1.1. That is, when the stress is reduced, the strain decreases along an almost elastic unloading line OA .So we say that the unloading obey the elastic rule.Fig. 1.2 is the typical graph of stresses versus relative elongation (compression) for four kinds of materials.1.2. Basic hypothesisThe subject of theory of elasticity and plasticity is concerned with the deformation and motion of elastic-plastic bodies or structures under the action of applied load or other disturbances. The general assumptions employed in the study of theory of elasticity and plasticity are the same as those used in the mechanics of continuous medium. Therefore, throughout this book, we have: (a), continuum hypothesis, we shell suppose that the macroscopic behavior of the solid bodies is the same as if they were perfectly continuous in structure; and physical quantities such as the mass and momentum associated with the matter contained within a given small volume will be regarded as being spread uniformly and without any caves, cracks and discontinuous.(b), Uniform hypothesis and isotropic hypothesis, that is, the materials of elastic-plastic body is homogeneous and uniformly distributed over its volume so that the smallest element cut from the body possesses the same specific physical properties as the body. The elastic properties are the same in all directions. (c), small deformation hypothesis, in this book, we discuss small deformation only.1.3. Historical remarksBefore the engineering design of structures, one must not only know the internal force field acting on the structural material and but also know the material response. It means that we need give an analysis of the stresses, deformation and displacement of structural elements. Therefore we have to know the constitutive relation of materials. Seeking some methods to solve these problems, many researchers have continually studied for over 2000 years.The pioneering works of theory of elasticity and plasticity are given by Augustin Cauchy (1789-1857), Marie-Henri Navier (1785-1836), Leonard Euler (1707-1783), Simon Denis Poisson (1781-1840), Barre de Saint-venant (1797-1886), Nikolai Ivanobich Mushihailishibili (1691-1976),Ludwig Prandtl (1875-1858), Thomas Young (1773-1829), Richard von Mises (1883-1953), and many others.The general principles employed in the study of theory of elasticity and plasticity are the same as those used in studying the mechanics of continuous medium. Their basic formulations can be attributed primarily to the work of Euler and Cauchy. Euler first brought forward the general principles of linear and angular momentum balance for continuous media upon which rest all continuum mechanics, including theory elasticity and plasticity. Cauchy first given the concept of the stress and strain at a point and also found the general differential equations of motion or equilibrium of a continuum in term of the stress. Cauchy’s work on elasticity provided a detailedkinematical theory of strain and deformation. The extension of the mathematical theory to more general solids was first made by Navier in 1821 using special assumption concerning the molecular forces of elastic solids. Technical application began earliest in 1855, when Saint-Venant solved the problem of the twisting of prismatic bars and worked out detailed numerical results. Saint-Venant also took up the problem of plastic flow and developed two-dimensional governing equations which were subsequently generalized to three dimensions by M.Levy in 1871. In 1864 H. Tresca reported experiments to the French Academy, which suggested that the plastic yielding of a metal occured when the maximum shear stress reached to a critical value. After Tresca in 1913 R.V on Mises published his yield condition theory based on theory of distortional energy.In the last century (1901-2000) the theory of elasticity and plasticity have rapidly developed in theory and engineering practical. Many great contributors should be mentioned. Such as B.G.Galerkin, G.R.Kirchhoff, S.P.Timoshenko, grange, A.Nadai, A.A.Il’yushin, W.W.Sokolovsky, W.Prager, R.Hill, Kh.A.Rakhmatulin, G.I.Taylor, P.Perzyna, and many others.In this period, especially in last 50 years, theory of elasticity and plasticity rapidly developed in China too. Qian Xueshen, Qian Weichang, Hu Haichang ,Wang Ren, Huang Kezhi, Xu Benye,Wu Jike, Huang zhuping, Gao yuchen, Wang ziqiang, and many others developed the theory of elasticity and plasticity, specially in the engineering applications. In this period published many valuable books about elasticity and plasticity on theoretical and engineering application.。
第一章弹塑性力学基础
i 1
的值从1到3变化。
xi 和 x j代表同一个矢量。
1.2.2 求和约定
求和约定在相关文献中都有详细的的介绍,下面只举一个小的例子, 考虑下边方程组:
a11 x1 a12 x2 a13 x3 b1 a21 x1 a22 x2 a23 x3 b2 a31 x1 a32 x2 a33 x3 b3
' 三阶张量: Gijk liml jnlkpGmnp
张量可以有任意阶,从以上表达式中可以明显得出一般的变换规则。 由于受笛卡尔坐标系的限制,所以所有这些张量均成为笛卡尔张量。
1.2.7 张量性质
张量的运算法则与矢量相类似,如张量相等即对应分量相等;张 量相加即对应分量相加;张量相乘构成一个新的张量,通常其阶数是 原张量的阶数之和;n阶张量缩并后变为n-2阶张量等等。下面简单的 举例说明: 1. 一个张量在一个坐标系中的所有分量都为0,则在所有坐标系中 的所有分量都为0。这个论述在减少数学和物理证明方面很有帮助, 如:要考虑 Fi 导致的应力 ij ,以后将证明,为满足平衡 ij, j Fi , 现将它重写为Di ij, j Fi 0,因为 Di 是零矢量,因此只需在一个 坐标系中证明即可。 2.一个三阶张量与一个二阶张量相乘,构成一个五阶张量。
令 所以
3.三阶张量缩并成一阶张量
证明: 因为 所以 又因为 所以
' Aijk Arst lri lsj ltk
' Aiik Arst lri lsi ltk
lri lsi rs
' Aiik Arst rs ltk
又
1 0 0 rs 0 1 0 0 0 1
弹塑性力学第1,2章
2.2 张量的计算
①张量的下标记号法: A点坐标x,y,z : F矢量力 Fx,Fy,Fz:
xi
i 1,2,3
fi
i 1,2,3
二阶张量应力可以表示为: ij ( i , j 1,2,3 ) x xy xz 11 12 13 yx y yz 22 23 21 31 32 33 zx zy z 二阶张量应变可以表示为:
ij ij i1 i1 i2 i2 i3 i3
11 11 21 21 31 31
12 12 22 22 32 32 13 13 23 23 33 33
ai, i
a1 a2 a3 ai x1 x2 x3 xi
张量的内积
A ai i i 张量A与张量B内积:
1 2 m
B bj1 j2 jn
A B
从张量A中和张量B中各取1个下标,约定求和一次成
为一个(m+N-2)阶的张量的运算称之为张量内积。 两个一阶张量的内积
A ai B bi
A B= A B cos A B
A B=ai bi a1b1 a2b2 a3b3
弹塑性力学的分析方法和体系
求解的基本方程: ①力的平衡方程式 ②几何方程或称之为变形协调方程 ③物理方程 弹塑性力学问题最后归结为在给定边界条件下求解这 三大基本方程的问题。 弹性力学与塑性力学的最大区别,本构关系不同。
弹塑性力学的主要内容
1.弹塑性本构关系 本构关系是材料本身固有的一种物理关系,指材 料内任一点的应力和应变之间的关系 弹性本构关系 塑性本构关系 广义虎克定律 增量理论和全量理论
弹塑性力学-01
材料力学的研究对象
2
弹性力学 • 研究对象-块体板壳
弹塑性力学 • 研究对象广泛 • 数学方法
3
构件的四项基本要求
•强 •刚 度:抵抗破坏(断裂或过量塑性变形)的 度:抵抗弹性变形的能力。
能力。 • 稳定性:保持其原有平衡状态的能力。
•韧
性:抵抗大塑性变形而不破裂的能力。
4
基本任务
• 研究可变形固体受到外载荷、温度变化及边界约束
1-2
弹塑性力学的基本任务
• 工程问题的对象是结构
• 结构的功能——承受载荷
• 结构的基本单元——构件
• 构件的属性 – 承受载荷、可变形、由固体材料构成
1
构件的种类——杆件、板、壳、块体
材料力学 • 研究对象-杆件
结构力学 • 研究对象-杆系
弹塑性力学 给出用材料力学和结构力学方 法无法准确求解问题的解法 给出材料力学和结构力学无法 给出的可靠性和精确度的度量
边界条件
边值问题 求解
对工程 问题作 出评价
20
1-5 弹塑性力学中的基本假设
• 按照物体的性质以及求解的范围,忽
略一些可以暂不考虑的因素,而提出 一些基本假设,使所研究的问题限制
在方便可行的范围以内。
21
一、连续性假设:物质密实地充满物体所在空间,毫无空隙。 (应力应变和位移等力学量可以用坐标的连续函数表示,可 用微积分数学工具) 二、均匀性假设:物体内,各处的力学性质完全相同。 三、各向同性假设:组成物体的材料沿各方向的力学性质完全 相同。(这样的材料称为各项同性材料;沿各方向的力学 性质不同的材料称为各项异性材料。) 四、小变形假设:材料力学所研究的构件在载荷作用下的变形 与原始尺寸相比甚小,故对构件进行受力分析时可忽略其 变形。 五、无初应力,物体原来处于一种无应力的自然状态,在外力 作用之前,物体内各点应力为零 22
第一篇第一章弹塑性力学基础
E
s
ssign s
E
s
E
s
sign
s s
A m sign
E1
(4)在弹性区完全线弹性假设
-- 假定物体是,
a.完全弹性—外力取消,变形恢复,无残余 变形。 b.线性弹性—应力与应变成正比。 因此,即应力与应变关系可用胡克定律表示。 符合(1)-(4)假定的称为理想弹性体。
变形状态假定: (5)小变形假定--假定位移和形变为很小。
a.位移<<物体尺寸,
例:梁的挠度v<<梁高h.
弹性体--当可变形固体由于受外因而发生的 变形限制在弹性范围内时,相应的物体称为 弹性体。 弹性力学的研究对象是完全弹性体。 完全弹性—对应于一定的温度T,受载物体 的应力和应变之间存在着一一对应的关系, 和时间t无关。
弹性力学的研究对象--研究各种形状的弹性 体,主要是板、壳、块体等非杆状结构,并 对杆状结构作进一步的分析。 1.1.3 塑性力学 塑形力学—研究物体在塑性状态的应力和应 变分布规律。 在塑性阶段,应力与应变不在具有一一对应 的全量关系,和加载路径有关,且呈现非线 性的关系。
第一节 弹性力学与塑性力学概述 第二节 弹塑性力学中的研究方法和任务 第三节 弹性力学与塑性力学中的基本假定 第四节 弹性与塑性力学的发展概况 第五节 基本概念 第六节 弹塑性力学的基础实验 第七节 变形体的本构模型
§1-1 弹性力学与塑性力学概述
1.1.1 弹性与塑性的概念 1、弹性--变形的可恢复性。 2、塑性--变形的不可恢复性。 1.1.2 弹性力学 弹性力学--研究弹性体由于受外力、边界约 束或温度改变等原因而发生的应力、形变和 位移。
然后在边界条件下求解上述方程,得 出应力、形变和位移。
1-弹塑性力学第一章 绪 论 弹塑性力学讲义 中文版 教学课件

1.1 研究内容
弹塑性力学是研究物体变形规律的一门学科, 是固体力学的一个分支。研究变形体受外界作用 (外载荷、边界强制位移、温度场等)时在变形体 内的反应(应力场、应变场、应变速度场等)。
与其它工程力学(理论力学、材料力学、结构 力学)的区别:研究方法、对象、结果的差异。弹 塑性力学的研究对象是整体(而不是分离体)变形 体内部的应力、应变分布规律(而不是危险端面)。
第一章 绪 论 (Introduction)
第一章 绪 论 (Introduction)
1.4 基本假设
假设的目的:为了简化研究 ✓ 连续性假设(无间隙、无空洞、无堆积) ✓ 均质、各向同性假设 ✓ 弹、塑性体假设
弹性体——满足广义虎克定律; 塑性体——符合体积不可压缩规律
✓ 小变形假设(几何假设。弹性:整个变形体;塑性: 各个变形瞬时)
✓ 无初始应力作用假设
塑性力学第一章
——采用塑性力学分析
三、塑性力学目的
研究在哪些条件下可以允许结构中某些 部位的应力超过弹性极限的范围,以充 分发挥材料的强度潜力
研究物体在不可避免地产生某些塑性变 形后,对承载能力和(或)抵抗变形能 力的影响
O
力应变曲线才以(1)式的规律沿MN
N M'
向下降。为了区分以上这种加载和卸
A'
载所具有的不同规律,就必须给出相
M ''
应的加卸载准则。
图2(a)
五、影响材料性质的其它几个因素
1、温度当温度上升时,材料的屈服应力将会 降低而塑性变形的能力则有所提高。
2、应变速率 如果实验时将加载速度提高几个数量 级,则屈服应力也会相应地提高,但材料的塑性应 变形能力会有所下降。 3.静水压力 当静水压力不太大时,材料体积的变 化服从弹性规律而不产生永久的塑性体积改变。
y2l(E2)l(E sl)P (Pe) ——垂直向下位移
若令
P
Pe
e
sl
E
,
P1 Pe 2
则当P由零增至Pe时,在图9的
坐标中为区间[0,1]上斜率等于
1的直线段OA。
O
线性强化
A
B 理想塑性
y e
图9
载荷-位移曲线
弹塑性解:
2 s.
当P由零逐渐增大到Pe时,第2杆的应力也逐渐增大而达到屈服状态: 如果P的值再继续增加,则(17)式已不再适用,相应的本构方程应改
6. 等向强化模型及随动强化模型
弹塑性力学-第1章 绪论
第一章绪论1.1弹塑性力学的任务固体力学是研究固体材料及其构成的物体结构在外部干扰(载荷、温度交化等)下的力学响应的科学,按其研究对象区分为不同的学科分支。
弹性力学和塑性力学是固体力学的两个重要分支。
弹性力学是研究固体材料及由其构成的物体结构在弹性变形阶段的力学行为,包括在外部干扰下弹性物体的内力(应力)、变形(应变)和位移的分布,以及与之相关的原理、理论和方法;塑性力学则研究它们在塑性变形阶段的力学响应。
大多数材料都同时具有弹性和塑性性质,当外载较小时,材料呈现为弹性的或基本上是弹性的;当载荷渐增时,材料将进入塑性变形阶段,即材料的行为呈现为塑性的。
所谓弹性和塑性,只是材料力学性质的流变学分类法中两个典型性质或理想模型;同一种材料在不同条件下可以主要表现为弹性的或塑性的。
因此,所谓弹性材料或弹性物体是指在—定条件下主要呈现弹性性态的材料或物体。
塑性材料或塑性物体的含义与此相类。
如上所述。
大多数材料往往都同时具有弹性和塑性性质,特别是在塑性变形阶段,变形中既有可恢复的弹性变形,又有不可恢复的塑性变形,因此有时又称为弹塑性材料。
本书主要介绍分析弹塑性材料和结构在外部干扰下力学响应的基本原理、理论和方法。
以及相应的“破坏”准则或失效难则。
以弹性分析为基础的结构设计是假定材料为理想弹性,相应于这种设计观点就以分析结果的实际适用范作为设计的失效准则,即认为应力(严柞地说是应力的某一函数值)到达一定限值(弹性界限),将进入塑性变形阶段时、材料将破坏。
结构中如果有一处或—部分材料“破坏”,则认为结构失效(丧失设计所规定的效用)。
由于一般的结构都处于非均匀受力状态,当高应力点或高应力区的材料到达弹性界限时,类他的大部分材料仍处于弹性界限之内;而实际材料在应力超过弹性界限以后并不实际发生破坏,仍具有一定的继续承受应力(载荷)的能力,只不过刚度相对地降低。
因此弹性设计方法不能充分发挥材料的潜力,导致材料的某种浪费。
弹塑性力学第一章 PPT资料共54页
16.11.2019
10
§1-2 基本假设和基本规律
2.1基本假设
假设1:固体材料是连续的介质,即固体体积 内处处充满介质,没有任何间隙。
从材料的微观看此假设不正确。因为粒子 间有空隙,但从宏观上看作为整体进行力学分 析时,假设1是成立的。假设1的目的:变形体 的各物理量为连续函数(坐标函数)。
16.11.2019
11
§1-2 基本假设和基本规律
假设2:物体的材料是均匀的。认为物体内 各点的材料性质相同(力学特性相同),所 以从物体内任一部分中取出微元体进行研究, 它的力学性质代表了整个物体的力学性质。
16.11.2019
12
§1-2 基本假设和基本规律
假设3:小变形假设。物体在外因作用下,物 体产生的变形与其本身几何尺寸相比很小。
哑标如:
3
rr1e1r2e2r3e3 riei riei r j e j 3 i1
uu1e1u2e2u3e3 uiei uiei u j e j
i1
33
1e 1 1 e 11e 1 2 e 2 .. ..3.e 3 3 e .3 ie jie jie jie j
排列符号的作用可以简化公式书写,如: 1. 三阶行列式:
A11 A12 A13 AA21 A22 A23eijkAi1Aj2Ak3eijkA1iA2jA3k
A31 A32 A33
(共六项,三项为正,三项为负)。
16.11.2019
32
§1-5 笛卡尔坐标系下的矢量、 张量基本知识
2. 基向量的叉积:右手系
16.11.2019
弹塑性力学
授课教师:龙志飞 目录
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/5/18
10
§1-2 基本假设和基本规律
2.1基本假设
假设1:固体材料是连续的介质,即固体体积 内处处充满介质,没有任何间隙。
从材料的微观看此假设不正确。因为粒子 间有空隙,但从宏观上看作为整体进行力学分 析时,假设1是成立的。假设1的目的:变形体 的各物理量为连续函数(坐标函数)。
2020/5/18
2020/5/18
5
§1-1 弹塑性力学的任务和对象
弹塑性力学是根据固体材料受外因 作用时所呈现的弹性与塑性性质而命名。 它们是固体材料变化过程的两个阶段。
2020/5/18
6
§1-1 弹塑性力学的任务和对象
当外部因素作用时,固体发生变形,如果当 外因去掉,变形体恢复原样(状),称固体
(材料)处于弹性性质, 单值;
14
§1-2 基本假设和基本规律
2. 几何连续性规律:要求变形前连续的物 体,变形后仍为连续物体,由这个规律建立 几何方程(6个)或变形协调方程,均为微 分方程。
2020/5/18
15
§1-2 基本假设和基本规律
3. 物理(本构)关系:应力(内力) 与应变(变形)之间的关系,据材料的 不同性质 来建立,最常见的为各向 同性材料。
2020/5/18
7
§1-1 弹塑性力学的任务和对象
如果当外因去掉,变形体未能恢复原状并 存在永久变形,变形固体在外因作用时已进
入塑性阶段, 曲线不是单值函数。
当然变形体常遇到在物 体某一局部处于弹性、而另 一区域处于塑性状态,弹塑
性交织在一起 。
2020/5/18
8
§1-1 弹塑性力学的任务和对象
2020/5/18
弹塑性力学
授课教师:龙志飞 目录
第 一 章 绪论 第 二 章 应力分析 第 三 章 应变分析 第 四 章 应力应变关系 第 五 章 线弹性力学问题的基本
解法和一般性原理
1
弹塑性力学
第 六 章 弹性力学平面问题的直角坐标系解答 第 七 章 弹性力学平面问题的极坐标系解答 第 八 章 等截面直杆的扭转 第 九 章 空间轴对称问题 第 十 章 弹性力学问题的能量原理 第 十一 章 塑性力学基础知识
2020/5/18
3
第一章 绪论
§1-1 弹塑性力学的任务和对象 §1-2 基本假设和基本规律 §1-3 弹性力学的研究方法 §1-4 弹性力学的发展梗概(略) §1-5 笛卡尔坐标系下的矢量、张
量基本知识
2020/5/18
4
§1-1 弹塑性力学的任务和对象
1.1 任务:
弹塑性力学是固体力学的一个分支学科, 它是研究可变形固体当受到外部因素(如载荷 作用、温度变化、边界约束移动等)作用时, 研究变形固体的变化和内力,为保证变形体或 结构在使用周期内有足够的强度、刚度和稳定 性,提供设计和施工(制造)的依据。
11
§1-2 基本假设和基本规律
假设2:物体的材料是均匀的。认为物体内 各点的材料性质相同(力学特性相同),所 以从物体内任一部分中取出微元体进行研究, 它的力学性质代表了整个物体的力学性质。
2020/5/18
12
§1-2 基本假设和基本规律
假设3:小变形假设。物体在外因作用下,物 体产生的变形与其本身几何尺寸相比很小。
在线弹性中本构方程为线性代数方程 (6个)。
2020/5/18
16
§1-3 弹性力学的研究方法
数学方法:精确解法(解析解)、近似解法、 数值解法。
实验方法:电测方法、光测方法等。
§1-4 弹性力学的发展梗概(略)
2020/5/18
17
§1-5 笛卡尔坐标系下的矢量、张 量基本知识
由于弹性力学研究对象的普遍性,导致方 程也较繁杂,推导也同样复杂,为了使得公式 表示简捷,近几十年弹性力学的论述及方程列 式采用指标符号表示。为了这一原因,这里也 简单介绍一些基本概念。这些符号或公式都是 在笛卡尔坐标系中采用。
2020/5/18
2
参考书目
1.徐芝纶, 弹性力学:上册.第三版,高等教育 出版社.1990年
2.陆明万.罗学富,弹性理论基础,清华大学出版 社. 1990年
3.杜庆华.余寿文.姚振汉,弹性理论,科学出版社. 1986年
4.王龙甫,弹性理论.第二版,科学出版社. 1984年 5.吴家龙,弹性力学:高等教育出版社.2001年
2020/5/18
18
§1-5 笛卡尔坐标系下的矢量、 张量基本知识
5.1 力学中常用的物理量
1.标量:
只有大小、没有方向性的物理量,与 坐标系选择无关。
用字母表示,如温度T、时间t、密度
等。标量无下标。
Байду номын сангаас
2020/5/18
19
§1-5 笛卡尔坐标系下的矢量、 张量基本知识
2.
矢量:有大小,又有方向性的物理量
1.2 研究的对象:
材料力学和结构力学是大学的主干课程, 它们也是固体力学中较基本的力学课程。在 许多工程设计中,工程师运用它们进行设计 和计算,但它们研究的对象单一:杆件型构 件或杆系结构,(一维问题),具有局限性。
2020/5/18
9
§1-1 弹塑性力学的任务和对象
1.2 研究的对象:
弹塑性力学研究的对象就广泛的多,除 了杆件外,二维、三维实体结构、板、壳结 构。所以弹塑性理论基本方程要复杂的多, 具有一般性。
如矢径
rr(或黑体)、位移
u、力
F 等,
矢量的符号记法。 矢量也可以用它的标量表示:
3
r r1e1 r2e2 r3e3 ri ei
i 1
x1
x3
rr
e3
er1
e2
x2
2020/5/18
20
§1-5 笛卡尔坐标系下的矢量、张
量基本知识
其中 e1、e2、e3为坐标的基方向(单位向量),
假设4:应力与应变关系为线性。此假设适 用于线弹性理论。
2020/5/18
13
§1-2 基本假设和基本规律
2.2 基本规律
完成弹塑性力学任务所要遵循的三个基 本规律(或应满足的三方面的条件):
1. 平衡规律:固体受到外力与自身的内力要 满足平衡方程,在弹性理论中它们为微分方 程(3个)。
2020/5/18
r1、r2、r3为r在坐标轴的投影(分量),都有
一个下标。
x3
3
u u1e1 u2e2 u3e3 ui ei
i 1
x1
r e3
r e1
r
x2 e2
2020/5/18
21
§1-5 笛卡尔坐标系下的矢量、 张量基本知识
3. 张量:有大小,并具有多重方向性的量
如应力 、应变 ,张量的符号记法。