armPWM实验test
ARM PWM电机控制实验

4.12 ARM PWM电机控制实验1.实验目的⑴通过实验掌握ARM处理器的PWM控制方式和工作原理;⑵熟悉S3C2410X的定时器寄存器的使用;⑶熟练掌握控制PWM定时器的软件编程方法。
2.实验设备硬件:Embest EduKit-III实验台,仿真器,PC机,步进电机,直流电机。
软件:Embest IDE集成开发环境,Windows 98/2000/NT/XP。
3.实验内容编写程序,实现:分别用定时器T0,T1的PWM控制步进电机和直流电机;按下SB1203改变电机的转动方向;改变定时器T0,T1的计数器寄存器的值改变电机的转动速率。
4.实验原理⑴ PWM定时器概述S3C44B0X有5个16位定时器,其中定时器0,1,2,3具有脉冲宽度调制(PWM)功能,定时器4具有内部定时作用,但是没有输出引脚。
定时器0具有死区生成器,可以控制大电流设备。
定时器T0,T1共用一个8bit预分频器,定时器T2,T3,T4共用另一个8bit预分频器,每个定时器都有一个时钟分频器,信号分频输出有5种模式(1/2,1/4,1/8,1/16 和外部时钟TCLK)。
每个定时器模块都从时钟分频器接收它自己的时钟信号,时钟分频器接收的时钟信号来自于8bit预分频器。
可编程8bit预分频器根据存储在TCFG0和TCFG1中的数据对PCLK 进行预分频。
当时钟被允许后,定时器缓冲计数器器寄存器(CTNTBn)把计数初值下载到减法计数器中。
定时器比较缓冲寄存器(CMPBn)把初始值下载到比较寄存器中来和减法计数器值比较,这种CTNTBn和CMPBn双缓冲寄存器特性能使定时器产生稳定的输出,且占空比可变。
每一个定时器都有一个自己的用定时器时钟驱动的16位减法计数器。
当减法计数器减到0的时候就会产生一个定时器中断来通知CPU定时器操作完成。
当定时器减法计数器减到0的时候相应的TCNTBn的值被自动重载到减法计数器中继续下次操作。
然而,如果定时器停止了,比如在运行的时候通过清除TCON 中定时器使能位来中止定时器的运行,TCNTBn 的值不会被重载到减法计数器中。
ARM嵌入式系统实验三(Buzzer_test)
脉宽调制器
PWM简介——双边沿输出
PWMMR0控制 PWM周期
T
其它匹配寄存器 控制边沿位置
双边沿控制PWM输出正负脉冲
PWM寄存器描述——基本功能寄存器
名称
描述
访问
PWMTCR
PWM定时器控制寄存器。控制PWM定时器计数器功能(禁止或复 位)。
读写
PWMTC
PWM定时器计数器。为32位计数器,计数频率为PCLK经过预分 频计数器后的频率值。
准备实验环境:连接好实验平台与PC机之间的连线,打 开目标板电源.
打开IDE,再打开实验例程目录下的buzzert_test子目 录下的buzzert_test.ews例程,编译,链接该工程.
点击IDE上的Debug菜单,选择Remote connect项或F8 键,远程连接目标板。
点击IDE的Debug菜单,选择Download下载调试代码 到目标系统的RAM中。
名称
描述
访问
PWMMCR PWM匹配控制寄存器。用于控制匹配时是否产生中断或复位TC。 读写
PWMMR0 ~
PWMMR6
PWM匹配定时器。每个寄存器对应于一个匹配值。除MR0和TC匹 配会置位所有单边沿模式下的PWM输出外,其它的匹配事件将清 零相应的单边沿或双边沿PWM输出。在双边沿模式下,匹配事件 还将置位下一个相邻的PWM输出。比如PWM2发生匹配,会清零 PWM2输出,如果在双边沿模式下还将置位PWM3输出。
v{oidlpbcMu_zaiznienitr(__vptoelilds_t)m()a; n蜂u后a鸣调l面(器)用;定测该义试函锁的,数相函调,环数用初始Cppp.化5在wwhaw)gdmm;mlp_____cmfc,is-shnFeloi,iPnitAbtdD_g(3-eD0_fl2Ae((,_c1Dp_phta0wer.uapcui)dpmglnw中;在tsgwgone3me,el/em_,p(r11lpp(ce_.)sIwcr-n;moNol中imafpbTotb,)3-)8dl,eUe1,0,0
23. PWM呼吸灯实验——【STM32开发板ARM】

制,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进 行控
制的一种非常有效的技术,其控制简单、灵活和动态响应好等优点 而成
为电力电子技术最广泛应用的控制方式,其应用领域包括测量,通 信,
功率控制与变换,电动机控制、伺服控制、调光、开关电源,甚至 某些
音频放大器,因此学习PWM具有十分重要的现实意义。
。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出
。而通用定时器也能同时产生多达 4路的 PWM 输出,这些在定时器 中断
章节中已经介绍过。 PWM的输出其实就是对外输出脉宽可调(即占空比调节)的方波信 号
,信号频率是由自动重装寄存器 ARR 的值决定,占空比由比较寄存 器
(3)初始化PWM输出参数,包含PWM模式、输出极性,使能等
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef*
PWM1和PWM2这两种模式用法差不多,区别之处就是输出电平的极性不 同。
PWM模式根据计数器CNT计数方式,可分为边沿对齐模式和中心对齐模 式。
‹# ›
普中STM32开发板带您进入ARM世界
(1)PWM边沿对齐模式 当 TIMx_CR1 寄存器中的 DIR 位为低时执行递增计数,计数器CNT从
0 计数到自动重载值(TIMx_ARR 寄存器的内容),然后重新从 0 开始 计数并生成计数器上溢事件。
ARM实验报告——单通道AD转换和PWM

实验题目:单通道AD转换和PWM灯光调节一、实验目的1,学习使用AD转换模块和PWM输出控制。
2,熟悉LPC2138开发板的使用。
3,锻炼学生自己的设计、创造和综合能力。
二、实验仪器微型计算机(含软件H-JTAG V0.3.1和ADSv1_2)、Easy ARM2131开发板、USB接口电源线和JTAG接口线以及部分跳线。
三、实验原理(1)AD转换特性:基本操作:(2)PWMLPC3131/2132/2138 的脉宽调制器建立在前一章的标准定时器0/1 之上。
应用可在PWM 和匹配当中进行选择。
特性:7 个匹配寄存器,可实现 6 个单边沿控制或 3 个双边沿控制 PWM 输出,或这两种类型的混合输出:-连续操作,可选择在匹配时产生中断-匹配时停止定时器,可选择产生中断-匹配时复位定时器,可选择产生中断每个匹配寄存器对应一个外部输出,具有下列特性:-匹配时设置为低电平支持单边沿控制和/或双边沿控制的 PWM 输出。
单边沿控制 PWM 输出在每个周期开始时总是为高电平,除非输出保持恒定低电平。
双边沿控制 PWM 输出可在一个周期内的任何位置产生边沿。
这样可同时产生正和负脉冲。
脉冲周期和宽度可以是任何的定时器计数值。
这样可实现灵活的分辨率和重复速率的设定。
所有PWM 输出都以相同的重复率发生。
双边沿控制的 PWM 输出可编程为正脉冲或负脉冲匹配寄存器更新与脉冲输出同步,防止产生错误的脉冲。
软件必须在新的匹配值生效之前将它们释放。
如果不使能 PWM 模式,可作为一个标准定时器带可编程 32 位预分频器的 32 位定时器/计数器当输入信号跳变时 4 个捕获寄存器可取得定时器的瞬时值,也可选择使捕获事件产生中断。
四、实验内容设置P0.30连接AD0.3,对AD0.3进行电压采样,进行AD转换,将转换后的电压值作为PWM占空比的改变值,来改变PWM的输出波形的占空比,以此来调节发光二极管灯光的亮度。
并将电压转换值发送到串口显示实验程序如下:#include "config.h"#define BEEP (1<<7)/***************************************************************************************** ** 函数名称:DelaymS()** 函数功能:长软件延时** 入口参数:dly 延时参数,值越大,延时越久** 出口参数:无**************************************************************************************/ void Delayms(uint32 dly){ uint32 i;for (;dly>0;dly--)for(i=0;i<5000;i++);}/***************************************************************************************** ** 函数名称:DelayNS()** 函数功能:长软件延时** 入口参数:dly 延时参数,值越大,延时越久** 出口参数:无*********************************************************************************/void DelayNS (uint32 dly){uint32 i;for ( ; dly>0; dly--)for (i=0; i<5000; i++);}#defineUART_BPS 115200 // 通讯波特率115200/***************************************************************************************** ** 函数名称:UART0_Init()** 函数功能:初始化串口0:波特率115200,8位数据位,1位停止位,无奇偶校验。
定时器PWM输出实验

定时器PWM输出实验1.实验目的1)熟悉Linux开发环境。
2)掌握S5PV210内部相关寄存器的操作方法,最终实现对外部设备的控制。
3)熟悉在Linux裸机环境下的C语言编程。
4)熟悉S5PV210的定时器编程。
2实验内容学习并编程实现ARM的定时器PWM输出。
3实验设备1)硬件:S5PV210教学实验箱、PC机;2)软件:PC机操作系统Windows98(2000、XP)+VMwareworkstation+Ubuntu12开发环境。
4基础知识S5PV210共有5个32bit的PWM定时器,其中定时器0、1、2、3有PWM功能,定时器4没有输出引脚。
PWM定时器使用PCLK_PSYS作为时钟源。
PCLK [TCWPB C'I prcNTsg ]SCLKPWM 1/11.41/8VISOortErolLogicOControlLogicl刖wmlOUTl・•彳DeadzoneXpwmTOUT2XpwmTOUT3二E.1L1~Fux34?Conlrol L阻c4*口pin Figure1-2PWMTIMERClockTreeDiagramAPLL_CONO Bit Daription InitialState ENABLE1311PLLenablecontro出;disable,1;enable) $o Resened 1301Reserved °LOCKED陶PLLlockingindication0=linlockec1=LockedReadOnlyReserved [26;26] Rese^ed 加MDPJ [25:16]PLLMdividevaluea O K CB Reserved [15:14]Reserved 0 pm网PLLPdividevalue 0x3 Reserved [7国Reserved 0 sm Hl PLL8dividevalue .~::0J(1 ThegsetvaueofAPLLCONC1generates800MH;outputclcck.i:thei叩utdockfrequencyis24MHz. Equationtocalculateth&outpulfrequeixfFOOT=MDNXFIN"PDMx件Md1.5.1.1TimerCanfigurationRegister(TCFGO,RM,Address=ftxE250j)000) TmerInputClockFrequency-PCLK/({prescalervalue+1))/{dividervalue}(prescalervalue}=1*255 {dividervalue}=1,2,4h fi.16,TCLKDeadzonelength=0*254Timer3CompareBuffer [31;D] TimersCompareBufferRegister 0x0000_0300定时器PWM 输出控制的相关内容:GPD0CON 确定GPD0DAT 引脚的功能,本实验用GPD0[0]作为TOUT_0的输出。
步进电机在ARM开发板上的实验

实验七电机转动控制实验一、实验目的1.熟悉ARM本身自带的六路即三对PWM,掌握相应寄存器的配置。
2.编程实现ARM系统的PWM输出和I/O输出,前者用于控制直流电机,后者用于控制步进电机。
3.了解直流电机和步进电机的工作原理,学会用软件的方法实现步进电机的脉冲分配,即用软件的方法代替硬件的脉冲分配器。
4.掌握带有PWM和I/O的CPU编程实现其相应功能的主要方法。
二、实验内容学习步进电机和直流电机的工作原理,了解实现两个电机转动对于系统的软件和硬件要求。
学习ARM知识,掌握PWM的生成方法,同时也要掌握I/O的控制方法。
1.编程实现ARM芯片的一对PWM输出用于控制直流电机的转动,通过A/D旋钮控制其正反转及转速。
2.编程实现ARM的四路I/O通道实现环形脉冲分配用于控制步进电机的转动,通过A/D旋钮转角控制步进电机的转角。
3.通过超级终端来控制直流电机与步进电机的切换。
三、预备知识1、用ARM SDT 2.5集成开发环境,编写和调试程序的基本过程。
2、ARM应用程序的框架结构。
3、会使用Source Insight 3 编辑C语言源程序。
4、掌握通过ARM自带的A/D转换器的使用。
5、了解直流电机的基本原理。
6、了解步进电机的基本原理,掌握环形脉冲分配的方法。
四、实验设备及工具硬件:ARM嵌入式试验箱,其主要包括:ARM嵌入式试验板,用于ARM7TDMI的JTAG 仿真器、PC机Pentium100以上软件:PC机操作系统win98以上、ARM SDT 2.51集成开发环境、仿真器驱动程序、Source Insight 3.0,UC操作系统五、实验步骤1.新建工程,将Exp6中的文件添加到工程。
2.编写直流电机初始化数(MotorCtrl.c)图7-6 直流电机初始化数3.控制直流电机图7-7 控制直流电机4.控制步进电机图7-8 控制步进电机六、思考题1.简述PWM的基本原理,思考其基本参数的变化对电机转动的影响。
ARM报告PWM和SPI流水灯
龙岩学院实验报告班级07电本一班学号2007050326 姓名刘桂银同组人 ____________________ 实验日期2010.5.12 室温___________________ 大气压 _________ 成绩______实验题目:PWM 音乐输出、数码显示和LED 显示一、实验目的1、复习GPI0的管脚功能及蜂鸣器电路蜂鸣的工作原理。
2、复习SPI引脚、结构和工作原理3、熟悉7段数码管真值表的由来。
4、掌握PWM模块的基本原理及应用。
5、了解简谱和频率的关系6、锻炼学生自己的设计、创造和综合性。
二、实验仪器微型电子计算机(含软件H-JTAG V0.3.1和ADSv1_2)、Easy ARM2131开发板、UART0接口线、USB接口电源线和JTAG接口线以及部分跳线。
三、实验原理1、(1)蜂鸣器控制电路在EasyARM2131开发板上,接有一个蜂鸣器,由P0.7控制,通过跳线JP11选择连接。
蜂鸣器控制电路如图一所示。
图一蜂鸣器控制电路电路说明:如果跳线JP11选择蜂鸣器,当P0.7输出低电平时,蜂鸣器鸣叫,当P0.7输出高电平则停止鸣叫。
实验利用P0.7的输出功能,控制蜂鸣器鸣叫。
程序设置PINSEL0使P0.7连接GPIO,并通过IOODIR 将其设置为输出状态,然后通过IOOCLR和IOOSET清零和置位P0.7 口,控制蜂鸣器。
LPC2131中,具有I2C总线功能的I/O 口(P0.2 —SCL、P0.3 —SDA0 P0.11 —SCL1 P0.14 —SDA1)为开漏输出,在用作I2C 总线以及其它功能时,需要加1K〜10KQ的上拉电阻。
则此电路图在JP11前,力口R22=10K的上拉电阻。
(2)七段数码管在显示方面,EasyARM2131开发板采用了一片74HC595驱动一位静态共阳LED数码管,如图(a)所示,其时钟(SCK八数据(SI)分别接到LPC2131的SP接口的SCLK0、MOSI0 ,这样就可以发送数据到74HC595 ;片选(RCK , 即74HC595输出触发端)与P0.29 口连接,由P0.29控制74HC595数据锁存输出;而最高位输出(SQH)连接到LPC2131的SPI接口的MISO0 ,可用来读回数据。
实验八:PWM输出实验

微控制器综合设计与实训实验名称:实验八PWM输出实验实验八:PWM输出实验1 实训任务(1) 开启TIM时钟,配置定时器通道对应IO口为复用输出;(2) 利用定时器的PWM输出功能产生波;(3) 通过调节占空比调节LED的亮度。
1.1 实验说明脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
简单一点,就是对脉冲宽度的控制。
STM32的定时器除了TIM6和7。
其他的定时器都可以用来产生PWM输出。
其中高级定时器TIM1和TIM8可以同时产生多达7路的PWM输出。
而通用定时器也能同时产生多达4路的PWM输出。
要使STM32的通用定时器TIMx产生PWM输出,除了上一实验的寄存器外,我们还会用到3个寄存器,分别是:捕获/比较模式寄存器(TIMx_CCMR1/2)、捕获/比较使能寄存器(TIMx_CCER)、捕获/比较寄存器(TIMx_CCR1~4)。
本实验仅利用TIM3的CH2产生一路PWM输出。
通过重映射TIM_CH2到PB5上,由TIM_CH2输出PWM来控制LED1的亮度。
1.2 实验步骤(1)在实训平台上将PB5连接LED灯;(2)编写timer.c与timer.h文件,实现通过重映射TIM_CH2到PB5上,由TIM_CH2输出PWM来控制LED1的亮度。
(3)编写main文件,编译成功;(4) 程序编译无误后下载到实训平台,观察LED亮度的变化:通过示波器观察输出的波形。
2 程序设计(1) 新建文件夹并命名为PWM输出实验,复制粘贴上一章的实验文件,将工程文件改名为PWM.uvprojx。
(2)timer.h文件只需再添加TIM3_PWM_Init的声明即可。
(3) 编写timer.c文件。
a. 开启TIM3时钟以及复用功能时钟置,配置PB5为复用输出要使用TIM3,必须先开启TIM3的时钟,使能GPIO外设和AFIO复用功能模块时钟。
ARM报告PWM和SPI流水灯
龙岩学院实验报告班级07电本一班学号2007050326 姓名刘桂银同组人实验日期2010.5.12 室温大气压成绩实验题目:PWM音乐输出、数码显示和LED显示一、实验目的1、复习GPIO的管脚功能及蜂鸣器电路蜂鸣的工作原理。
2、复习SPI引脚、结构和工作原理3、熟悉7段数码管真值表的由来。
4、掌握PWM模块的基本原理及应用。
5、了解简谱和频率的关系6、锻炼学生自己的设计、创造和综合性。
二、实验仪器微型电子计算机(含软件H-JTAG V0.3.1和ADSv1_2)、Easy ARM2131开发板、UART0接口线、USB接口电源线和JTAG接口线以及部分跳线。
三、实验原理1、(1)蜂鸣器控制电路在EasyARM2131开发板上,接有一个蜂鸣器,由P0.7控制,通过跳线JP11选择连接。
蜂鸣器控制电路如图一所示。
图一蜂鸣器控制电路电路说明:如果跳线JP11选择蜂鸣器,当P0.7输出低电平时,蜂鸣器鸣叫,当P0.7输出高电平则停止鸣叫。
实验利用P0.7的输出功能,控制蜂鸣器鸣叫。
程序设置PINSEL0使P0.7连接GPIO,并通过IO0DIR 将其设置为输出状态,然后通过IO0CLR和IO0SET清零和置位P0.7口,控制蜂鸣器。
LPC2131中,具有I2C 总线功能的I/O口(P0.2-SCL、P0.3-SDA0;P0.11-SCL1、P0.14-SDA1)为开漏输出,在用作I2C总线以及其它功能时,需要加1K~10KΩ的上拉电阻。
则此电路图在JP11前,加R22=10K的上拉电阻。
(2)七段数码管在显示方面,EasyARM2131开发板采用了一片74HC595驱动一位静态共阳LED数码管,如图(a)所示,其时钟(SCK)、数据(SI)分别接到LPC2131的SPI接口的SCLK0、MOSI0,这样就可以发送数据到74HC595;片选(RCK,即74HC595输出触发端)与P0.29口连接,由P0.29控制74HC595数据锁存输出;而最高位输出(SQH)连接到LPC2131的SPI接口的MISO0,可用来读回数据。
ARM11第5课脉宽调制PWM实验

ARM裸板编程——脉宽调制PWM简介PWM英文是:Pulse Width Modulation,称脉宽调制。
广泛应用在从测量、通信到功率控制等领域中。
在6410开发板中通过操作PWM可以输出想要得到的方波,它在6410开发板中是通过定时器实现的。
之后我们通过开发板上的蜂鸣器来查看方波的现象可以在6410手册中找到GPF14引脚设置我们需要将GPF14引脚设置成PWM TOUT功能,从而使GPF14引脚可以输出相应的方波。
通过查看6410手册中的PWM章节我们可以看到在6410中PWM的特征在产生方波时,频率是通过PCLK来设定的,再通过若干的分频器、多路选择器来确定方波的频率,最后通过一个逻辑控制器来实现方波。
以下是时序图:在到达逻辑控制前,我们需要通过设置预定标器、分频器和多路选择器来设置输入的时钟频率,通过TCFG0和TCFG1来设定PWM 配置过程通过TCNTBn和TCMPBn寄存器来设置波形保持电平的时长,直接往这两个寄存器中写入值即可最后通过TCON控制寄存器来对PWM进行相应的控制,我们使用的蜂鸣器是使用的0号定时器。
需要注意的是:TCON的操作必须是读-修改-写的方式,设置完只需要将[0]设置成使能即可假如使能后需要修改TCNTB和TCMPB的值就需要先将[1]设置为0,TCNTB和TCMPB的值就会更新,之后再将[1]设置为0PWM实现蜂鸣器响应实例脉宽调制PWM——练习1)只看手册编写程序,使蜂鸣器输出的更加急促2)使用蜂鸣器模拟将病危病人救活的心电图声音3)当蜂鸣器响的时候,4个LED灯全亮;当蜂鸣器不响的时候,4个LED灯全灭;。
32单片机pwm控制直流电机的实验报告
32单片机pwm控制直流电机的实验报告实验名称:32单片机PWM控制直流电机实验实验目的:通过学习和实验,让学生了解32单片机PWM控制直流电机的原理和实现方式。
实验原理:PWM即脉冲宽度调制,是一种常用的调制方式。
其原理是基于脉冲的占空比,通过改变脉冲的宽度来控制输出信号的平均值。
在32单片机中,我们可以通过配置寄存器和引脚功能来实现PWM输出。
此次实验中,我们需要通过PWM控制直流电机的速度。
对于直流电机,我们可以通过改变电机的电压来改变其转速,因此我们可以通过控制PWM信号的占空比来实现对直流电机速度的控制。
实验过程:1、准备材料:32单片机、电位器、直流电机,电容等。
2、将电位器接入32单片机的ADC引脚,通过调节电位器来改变ADC引脚的电压。
3、编写程序,配置32单片机PWM模块,实现对直流电机的速度控制。
程序示例如下:#include <reg52.h>sbit IN1 = P3^0;sbit IN2 = P3^1;sbit EN = P3^2;unsigned int speed;void timer0_init(){TMOD = 0x02;TH0 = 0xff;TL0 = 0xff;ET0 = 1;EA = 1;TR0 = 1;}{timer0_init();while(1){speed = ADC_Get(1);TH0 = speed >> 8;TL0 = speed;P1 = speed;}}void pwm_init(){TMOD |= 0x10;TL1 = 0x00;TH1 = 0x00;ET1 = 1;TR1 = 1;EA = 1;}void pwm_output(unsigned int duty) {int value;value = duty*10;TL1 = value;TH1 = value >> 8;}void timer1_isr() interrupt 3{IN1 = 0;IN2 = 1;pwm_output(90);}void timer0_isr() interrupt 1{EN = 1;}4、进行编译和下载,将32单片机与电机、电源等接线好。
实验4 PMW定时器实验
实验4 PWM 控制蜂鸣器实验1、实验目的熟悉了解S3C2410 A PWM timer 的工作原理。
掌握S3C2410A PWM timer 使用方法。
2、实验设备PC 机、ARM 仿真器、GEC2410 开发板。
3、实验内容设置S3C2410A 的timer0,时钟周期为300~3400Hz,即音频频率,控制蜂鸣器。
4、实验原理脉宽调制(PWM)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
模拟电路模拟信号的值可以连续变化,其时间和幅度的分辨率都没有限制。
9V 电池就是一种模拟器件,因为它的输出电压并不精确地等于9V,而是随时间发生变化,并可取任何实数值。
与此类似,从电池吸收的电流也不限定在一组可能的取值范围之内。
模拟信号与数字信号的区别在于后者的取值通常只能属于预先确定的可能取值集合之内,例如在{0V,5V}这一集合中取值。
模拟电压和电流可直接用来进行控制,如对汽车收音机的音量进行控制。
在简单的模拟收音机中,音量旋钮被连接到一个可变电阻。
拧动旋钮时,电阻值变大或变小;流经这个电阻的电流也随之增加或减少,从而改变了驱动扬声器的电流值,使音量相应变大或变小。
与收音机一样,模拟电路的输出与输入成线性比例。
尽管模拟控制看起来可能直观而简单,但它并不总是非常经济或可行的。
其中一点就是,模拟电路容易随时间漂移,因而难以调节。
能够解决这个问题的精密模拟电路可能非常庞大、笨重(如老式的家庭立体声设备)和昂贵。
模拟电路还有可能严重发热,其功耗相对于工作元件两端电压与电流的乘积成正比。
模拟电路还可能对噪声很敏感,任何扰动或噪声都肯定会改变电流值的大小。
数字控制通过以数字方式控制模拟电路,可以大幅度降低系统的成本和功耗。
此外,许多微控制器和DSP 已经在芯片上包含了PWM 控制器,这使数字控制的实现变得更加容易了。
简而言之,PWM 是一种对模拟信号电平进行数字编码的方法。
基于ARM的直流电机PWM调速系统设计

基于ARM的直流电机PWM调速系统设计基于ARM的直流电机PWM调速系统设计摘要:本文主要探讨了基于ARM的直流电机PWM调速系统的设计方法和实现过程。
首先介绍了调速系统的基本原理和需求,然后详细讨论了ARM控制器的选择和配置,以及PWM调速算法的设计和实现。
最后,通过实验验证了该系统的性能和稳定性。
关键词:ARM;直流电机;PWM调速;系统设计;控制算法1. 引言直流电机的广泛应用使得其调速系统的设计成为工程领域中的热点问题。
PWM(Pulse Width Modulation)调速技术作为一种常用的调速方法,已经被广泛研究和应用。
而ARM (Advanced RISC Machines)控制器作为一种高性能、低功耗的处理器,具备较强的控制能力和灵活性,因此被广泛应用于各种控制系统中。
本文旨在基于ARM控制器,设计并实现一个可靠稳定的直流电机PWM调速系统。
2. 调速系统设计直流电机调速系统的基本原理是通过调整电机供电电压的大小和方向来控制转速。
PWM调速技术是一种通过改变输出脉冲宽度的方法,控制电机平均电压大小的技术。
通过控制PWM信号的占空比,可以实现电机转速的调节。
首先,需要选择合适的ARM控制器作为系统的核心处理器。
在选择控制器时,应考虑其计算能力、内存容量、通信接口等因素,并保证其能够满足系统的实时控制需求。
同时,需要对控制器进行相应的配置,包括时钟频率、中断控制等设置。
接下来,需要设计和实现PWM调速算法。
PWM调速算法的核心是根据控制信号生成PWM波形,以控制电机的转速。
常用的算法包括PID控制算法和模糊控制算法等。
根据实际需求和系统性能要求,选择合适的调速算法,并在ARM控制器上进行算法的实现和调试。
3. 系统实现在ARM控制器上实现PWM调速系统需要进行硬件和软件的开发。
硬件开发主要包括电机驱动电路的设计和PCB布局。
电机驱动电路需要根据电机的额定电压和电流进行设计,同时需要包括过电流保护、电源滤波等功能。
ARM的PWM输出实验报告 精品

微机原理实验报告实验名称:PWM输出实验一、实验目的1、掌握LPC2131的脉宽调制器PWM。
2、掌握脉宽调制器的特性。
3、了解其引脚的连接设置及结构。
4、知道其寄存器功能的描述及其基本操作。
二、实验设备EasyARM2131开发板、PC机、ADS1.2软件等。
三、实验原理通过改变PWMMR0的值,可以改变PWM 输出的频率。
实验设定PWM输出单边沿PWM方波,控制蜂鸣器BEEP发声,改变PWM的频率,蜂鸣器放出不同的频率的声音,甚至可以播放音乐。
进行PWM音乐输出实验,需要了解一些简谱和频率的关系,在文件music.h中可以得到部分信息。
流程图如下:四、实验内容及清单PWM 音乐输出实验程序:#include "config.h"#include "music.h"#define HC595_CS (1 << 29) // P0.29口为74HC595的片选const uint32 LEDS8 = (0xFF << 18); // P1[25:18]控制LED8~LED1,低电平点亮uint8 rcv_data;/* 歌曲曲谱-虹彩妹妹*/const uint32 HCMM[] ={_LA, _SO, _MI, _LA, _SO, _MI,_LA, _LA, _SO, _LA,_LA, _SO, _MI, _LA, _SO, _MI,_RE, _RE, _DO, _RE,_MI, _MI, _SO, _LA, _DO1, _LA, _SO,_MI, _MI, _SO, _DO,_MI, _MI, _MI, _MI, _MI,_1LA,_1LA,_1SO,_1LA,};/* 歌曲节拍*/const uint32 HCMM_L[] ={_4, _8, _8, _4, _8, _8,_8, _4, _8, _2,_4, _8, _8, _4, _8, _8,_8, _4, _8, _2,_4, _8, _8, _8, _8, _8, _8,_8, _4, _8, _2,_4, _4, _4, _8, _8,_8, _4, _8, _2,};const uint32 LED_TBL[] = {0x20,0x10,0x04,0x20,0x10,0x04,0x20,0x20,0x10,0x20,0x20,0x10,0x04,0x20,0x10,0x04,0x02,0x02,0x01,0x02,0x04,0x04,0x10,0x20,0x01,0x20,0x10, 0x04,0x04,0x10,0x10,0x04,0x04,0x04,0x04,0x04,0xA0,0xA0,0x90,0xA0,};const uint32 SMG_TBL[] = {0x82,0x92,0xB0,0x82,0x92,0xB0,0x82,0x82,0x92,0x82,0x82,0x92,0xB0,0x82,0x92,0xB0,0xA4,0xA4,0xF9,0xA4,0xB0,0xB0,0x92,0x82,0xF9,0x82,0x92, 0xB0,0xB0,0x92,0xF9,0xB0,0xB0,0xB0,0xB0,0xB0,0xA1,0xA1, 0xC6,0xA1};void Delay(uint8 dly){uint32 i;for(; dly > 0; dly--)for(i = 0; i < 0x7FFFF; i++); }void MSPI_Init(void){//PINSEL0 = (PINSEL0 & 0xFFFF00FF) | 0x00005500; // 设置管脚连接SPI PINSEL0 = (PINSEL0 & (~(0xFF << 8))) | (0x55 << 8) ;SPI_SPCCR = 0x52; // 设置SPI时钟分频S PI_SPCR = (0 << 3) | // CPHA = 0, 数据在SCK 的第一个时钟沿采样(1 << 4) | // CPOL = 1, SCK 为低有效(1 << 5) | // MSTR = 1, SPI 处于主模式(0 << 6) | // LSBF = 0, SPI 数据传输MSB (位7)在先(0 << 7); // SPIE = 0, SPI 中断被禁止}/*********************************************************************** *********************************** 函数名称:MSPI_SendData()** 函数功能:向SPI总线发送数据。
实验3.9-PWM输出实验

瑞泰创新
基于DSP系统的实验 基于DSP系统的实验 DSP PWM输出实验 PWM输出实验
瑞泰创新
PWM输出实验 PWM输出实验
一、实验步骤
1.实验准备:连接实验设备,关闭实验箱上扩展模块和信号源电源 实验准备:连接实验设备, 开关。 开关。 2.设置Code Composer Studio 2.21在硬件仿真 .设置 在硬件仿真(Emulator)方式下运行。 方式下运行。 在硬件仿真 方式下运行 3.启动Code Composer Studio 2.21,选择菜单 .启动 ,选择菜单Debug→Reset CPU。 。 4.打开工程文件: .打开工程文件:
7.运行并观察结果 .
-单击“Debug”菜单,“Run”项,运行程序; 单击“ 菜单, 单击 菜单 项 运行程序; -观察示波器上的波形。 观察示波器上的波形。 观察示波器上的波形
8.束运行退出Leabharlann ode Composer studio。 .束运行退出 。
二、实验结果
通过示波器可观察到不同占空比的PWM输出波形,其载波频率、占空比 输出波形,其载波频率、 通过示波器可观察到不同占空比的 输出波形 与程序中对控制寄存器的设置相关。 与程序中对控制寄存器的设置相关。
瑞泰创新
5.编译、下载程序。 .编译、下载程序。 6.连接示波器: .连接示波器:
连接示波器探头的地线与实验箱右侧的测试点的DGND相连, 红表笔 相连, 连接示波器探头的地线与实验箱右侧的测试点的 相连 与测试点PWM1~4相连。 相连。 与测试点 相连 注意:如果使用的是 单板, 扩展口上的PWM输出引脚 注意:如果使用的是2812单板,请连接 扩展口上的 单板 请连接P1扩展口上的 输出引脚 做测量。 具体位置参考ICETEK-F2812-A评估板原理图。) 评估板原理图。 做测量。(具体位置参考 评估板原理图
基于ARM的PWM波参数测试

基于ARM的PWM波参数测试仪摘要:随着电子技术的进展PWM应用领域包括测量,通信,功率控制与变换,电动机控制、伺服控制、乃至某些音频放大器,因此研究PWM技术具有十分重要的现实意义。
本文是设计频率/脉冲宽度的测量与显示的硬件电路与程序的编制。
它能够测量脉冲信号的脉冲宽度,频率等参数。
利用STM32通用按时器TIME4产生PWM波。
利用按时器TIME3输入捕捉模式来测量由PA7输入的脉冲信号的频率,占空比,电压。
关键字:STM32 PWM 占空比输入捕捉模式频率电压1 整体设计本设计旨在加深对ARM的学习,巩固大学四年所学专业知识,提升动手能力和试探问题解决问题的能力。
本设计选择意法半导体的STM32F开发板,通过对该开发板的研究学习,和对STM32F103系列芯片的学习,掌握其各类外设功能。
通过对TIM4按时器进行控制,使之各通道输出插入死区的互补PWM输出,各通道输出频率均为10KHz。
其中,通道3输出的占空比为50%,通道4输出的占空比为35%,各通道互补输出为反相输出。
TIM4按时器的通道3到4的输出别离对应PB6和PB7引脚。
然后利用TM3的通道2进行捕捉,通道2所接是PA7管脚,按照捕捉的高低电平的计数能够算出其频率和占空比,启动AD对PA7进行收集,所测得的电压为其峰值电压。
最后用串口在电脑上显示出测得的电压,占空比,频率。
程序流程图整个设计程序流程如图1所示:图1 程序流程图2 详细设计STM32简介STM32F103xx增强型系列利用高性能的ARM/Cortex-M3/32位的RISC内核,工作频率为72MHz,内置高速存储器(高达128K字节的闪存和20K字节的SRAM),丰硕的增强I/O端口和联接到两条APB总线的外设。
所有型号的器件都包括2个12位的ADC 、3个通用16位按时器和一个PWM按时器,还包括标准和先进的通信接口:多达2个I2C和SPI、3个USART、一个USB和一个CAN。
实验10 嵌入式PWM程序测试

break;
case '-':
if( freq > 11 )
freq -= 10 ;
break;
case ESC_KEY:
case EOF:
stop_buzzer();
exit(0);
default:
break;
}
}
}
4.保存文件,编译源代码:
7.进入到/mnt/nfs/pwm目录
cd /mnt/nfs/pwm
8.运行按键程序。
./pwm_test
9.按下‘+’,“-”来改变的PWM的频率,观察蜂鸣器的声音变化,最后按下“ESC”键结束程序。
}
}
int main(int argc, char **argv)
{
int freq = 1000 ;
open_buzzer();
printf( "\nBUZZER TEST ( PWM Control )\n" );
printf( "Press +/- to increase/reduce the frequency of the BUZZER\n" ) ;
if(tcsetattr(STDIN_FILENO,TCSANOW,&oldt) < 0) {
perror("restore the termial setting");
exit(1);
}
return ch;
}
static int fd = -1;
static void close_buzzer(void);
嵌入式--蜂鸣器控制实验
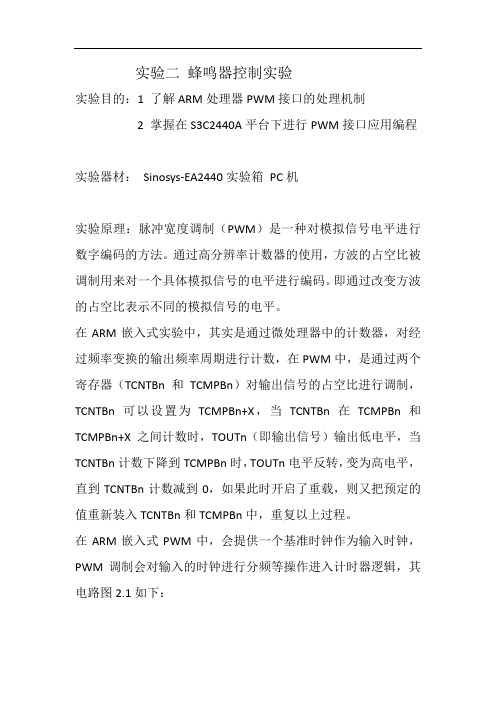
实验二蜂鸣器控制实验实验目的:1 了解ARM处理器PWM接口的处理机制2 掌握在S3C2440A平台下进行PWM接口应用编程实验器材:Sinosys-EA2440实验箱PC机实验原理:脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
即通过改变方波的占空比表示不同的模拟信号的电平。
在ARM嵌入式实验中,其实是通过微处理器中的计数器,对经过频率变换的输出频率周期进行计数,在PWM中,是通过两个寄存器(TCNTBn和TCMPBn)对输出信号的占空比进行调制,TCNTBn可以设置为TCMPBn+X,当TCNTBn在TCMPBn和TCMPBn+X 之间计数时,TOUTn(即输出信号)输出低电平,当TCNTBn计数下降到TCMPBn时,TOUTn电平反转,变为高电平,直到TCNTBn计数减到0,如果此时开启了重载,则又把预定的值重新装入TCNTBn和TCMPBn中,重复以上过程。
在ARM嵌入式PWM中,会提供一个基准时钟作为输入时钟,PWM调制会对输入的时钟进行分频等操作进入计时器逻辑,其电路图2.1如下:图2.1 PWM计时器框图如图2.1,输入的时钟PCLK经过一个8bit预置器和一个分频器,将得到的时钟进入计数器逻辑板块作为驱动时钟,而输出的TOUT则作为蜂鸣器(蜂鸣器控制电路如图2.2)的驱动信号。
图2.2 蜂鸣器控制电路实验总结:实验的主函数首先设置时钟,端口初始化,并捕捉进入测试函数的指令,与实验一大致相同,在此不在赘述,重点分析测试函数。
测试函数如下:void Beep(int freq,int ms){int div,irGPBCON&=~0x3; //将GPB0作为输入口rGPBCON|=0X2; // 接入TIMER0rTCFG0&=~0XFF; // 设置prescaler为32rTCFG0|=0XF;rTCFG1&=~0XF; //选择mux=1/16rTCFG1|=0X3;div=plck/32/16/freq 计算TCNTB0的值rTCNTB0=div;rTCMPB0=rTCNTB0>>2; 占空比为4:1rTCON&=~0X1F; 设置死区自动重载反转人工载入开始rTCON|=0XB; 关闭死区开启重载关反转开人工载入开始rTCON&=~2; 关闭人工载入for(i=1,i<ms,i++);}void beep_test(void){U8 key;freq=1000;beep(freq,0);while(1){Uart_Printf("\nWant to quit Alarm I/O test,OK? (Y/N)\n");key=Uart_Getch();if(key=='y'||key=='Y')break;else if(key=='+'){freq+=100; beep(freq,0) ; //加号增加频率Uart_Printf( "Press +to increase/reduce the frequency of beep !\n" ) ;}else if( key == '-' ) //减号降低频率{freq-=100; beep(freq,0) ;Uart_Printf( "Press - to increase/reduce the frequency of beep !\n" ) ; }实验中,通过DNW将bin文件下载到实验箱中,发现蜂鸣器开始想起,通过“+”“-”的控制,使得频率改变,明显感到蜂鸣器的响声变尖或者变低沉,说明程序有效。