高等车辆学2-车辆悬架与转向-1
汽车底盘控制技术的现状和发展趋势

汽车底盘控制技术的现状和发展趋势摘要:伴随着社会的不断发展,我国的工业化产业也变得越来越快。
尤其是汽车制造产业正在飞速发展。
汽车在进行驾驶与运行的过程中,汽车的底盘控制技术发挥着至关重要的作用。
甚至可以说,汽车底盘技术在一定程度上,汽车底盘直接影响着汽车驾驶过程中的安全性。
本文探讨了汽车底盘的控制技术手段实施状况,合理预测技术发展趋势。
关键词:汽车底盘;控制技术;实施现状;发展趋势前言:对于汽车底盘进行全面操作控制,旨在确保汽车平稳与安全行驶,并且达到了灵活节约汽车行驶过程能耗的目标。
近些年以来,汽车底盘的控制操作系统组成结构日益趋向于完善,从而更加方便汽车驾驶人员对其实施必要的操控管理。
车辆驾驶技术人员在正确操作汽车底盘装置设备的前提下,确保达到实时调整车轮附着力的效果,避免了汽车行驶中的安全风险因素产生。
1、汽车底盘控制技术的基本含义汽车底盘控制的技术基本含义就是车辆驾驶技术人员针对底盘相应部位进行必要的操作处理,确保达到车辆行驶速度改变、刹车、车轮偏倚角度以及车辆制动力矩调整控制等目标。
车辆驾驶人员对于车辆底盘的自动控制指令应当进行准确的发送操作,通过实施科学的优化设计方法来调整车辆现有的偏倚角度、车轮滑动速度、路面附着强度等关键性能参数[1]。
因此从总体角度来讲,对于汽车底盘实时控制调节的实践技术思路应当体现在保障汽车行驶过程的平稳安全,合理提升汽车系统装置的各项参数性能。
2、汽车底盘控制技术的目前实施现状2.1牵引力控制技术车辆底盘的牵引作用力参数应当得到科学的合理设置,有效确保底盘牵引力达到适中程度。
牵引力控制的技术实现要点就是实时监测车辆驱动轮的滑动频率速度,避免车辆驱动轮表现为过快的滑动现象。
车辆牵引力应当被控制在最佳的系统参数设计范围,否则如果超出了底盘牵引力的设置参数范围,那么整车稳定性就会受到明显的不利影响。
对于车辆进行牵引力的自动调节控制,上述过程不能缺少车辆防抱死的内置系统模块作为辅助,确保实时性的传感检测信号数据能得到准确的传递。
悬架运动学及柔顺性(K&C)试验介绍

悬架运动学及柔顺性(K&C)试验介绍时间:2011-05-16 11:55:09 来源:奇瑞汽车股份有限公司试验技术中心整车试验部戚海波薛志祥张珣本文主要介绍悬架运动学及柔顺性(K&C)试验台的结构组成、试验项目以及其在底盘开发中的应用。
【摘要】汽车操纵稳定性是汽车主要性能之一。
卓越的操纵稳定性能不仅大大提高了汽车主动安全性,更能给驾驶者带来驾驶乐趣。
随着我国汽车行业的迅猛发展,用户对汽车产品的性能要求不断提高,并越来越关注整车的操纵稳定性。
汽车的悬架运动学及柔顺性特性对整车的操纵稳定性水平具有决定性的影响,因此国际上各大汽车生产厂家及试验机构都通过购买悬架运动学及柔顺性参数测量设备来提升其在整车底盘设计和操稳调校方面的能力。
1. K&C试验台介绍悬架运动学及柔顺性试验台简称K&C试验台,主要用来测量悬架及转向系统的几何运动学(Kinematics)特性和各种受力情况下的柔顺性(Compliance)数据,这些特性和数据在很大程度上影响着整车的操纵稳定性水平。
K&C试验的基本原理就是向车辆的悬架系统施加一系列的载荷和位移输入。
对于准静态K&C试验,为了不激励起任何惯性、减振器或橡胶衬套引发的动态力,输入施加的速度很缓慢。
K&C试验台在此过程中测量大量的参数,通过这些参数可以得到与车辆悬架性能相关的主要参数,包括悬架刚度和迟滞,Bump Steer,Roll Steer,侧倾刚度,纵向和侧向柔性转向,以及转向系统特性。
对这些参数的理解对于彻底理解车辆的行驶性、平顺性、转向和操纵性具有决定意义。
K&C试验结果可以为ADAMS等CAE分析软件提供辅助验证,提高仿真的准确性,为设计和试验开发提供有力支持。
通过K&C试验、道路上的客观测量试验和主观评价试验的结果进行系统分析,我们可以找出车辆在操纵稳定性方面存在的问题以及问题的原因。
K&C双轴试验台2. K&C测试系统的主要结构悬架运动学和柔顺性测试系统包括四个主要的子系统:• 平台模块• 反力框架和车身夹持系统• 位置和负载传感器• 控制和仪表系统A. 平台模块双轴K&C试验台使用四个平台模块,以便于在各个车辆轮胎胎面施加位移或者作用力。
车辆悬架完全调校手册

+后:降低在弯中的抓地
Toe Angle:束角
当你俯视车子的时候,轮胎的角度就是束角了。数值分为正负之分,
当数值为负数时,轮胎呈\ /,专业术语叫Toe Out;
当数值为正数时,轮胎呈/ \,专业术语叫Toe In;
前Toe In,后Toe Out:改善转向不足;
但如果转弯时悬挂不够软,就无法产生足够的纵翻角(纵翻角是车身与纵向水平轴之间的央角。弯道,斜坡等都会使其变化驾驶中它会带来一些麻烦:轮胎滑动垂直载荷变大等)应付横向的离心力。降低车辆在崎岖路面上平稳前进的能力。如果转弯率、制动比和下压力和齿轮比都没问题,但速度不够,则应换上硬的悬挂。如果感到过弯时转向困难或者是速度不够,则应换上软的悬挂。
[ZT]科林麦克雷拉力赛之尘埃完全调教手册(未完成)
--------------------------------------------------------------------------------
一、车轮
Camber:外倾角
车轮面与地面不垂直,车轮面与垂直面的夹角称为CAMBER。CAMBER 的作用是让车轮与地面接触的面内外圈温度相当。
阻尼只有在弹簧运动时有效,当赛车在匀速行驶时候阻尼是无效的,因为弹簧此时不运动,那么什么时候阻尼有效呢?举一个例子,当赛车制动的时候,赛车的重心前移,此时前轮的弹簧被压缩,而后轮的弹簧回弹,而控制前轮弹簧被压缩的速度则是前轮阻尼所要做的事,后轮的阻尼则控制后轮弹簧伸长的速度。重心的移动在直路或者弯路上都会发生,而重心移动的速度是由阻尼软硬决定的。阻尼的设置和车手的驾驶习惯有关。
பைடு நூலகம்
2.稳定性。当然如果路面是完全平的话,没有侧倾当然行使会很稳定。但事实并非如此。过硬的防倾杆,会在单侧车轮通过突起的路面的时候,把车身抬起。高速通过突起的东西时容易翻车。
211072071_车载视觉感知预瞄下的主动悬架控制分析与实车应用(一)
文/江苏 高惠民车载视觉感知预瞄下的主动悬架随着家用汽车的普及率逐年提高,人们由最初的追求家用汽车较好的基本性能指标(动力性、安全性和经济性等)以及提供的方便与快捷,逐步上升到追求家用汽车自身优良的行驶性能和运动特性(舒适性、平顺性和操稳性)。
与此同时,由国内外车辆研究机构的相关报告和汽车公司研发和生产的一些新型车辆可知,先进的车辆悬架系统(主动悬架、半主动悬架等)可以有效改善车辆各项行驶性能,是车辆底盘智能化发展的一个重要方向。
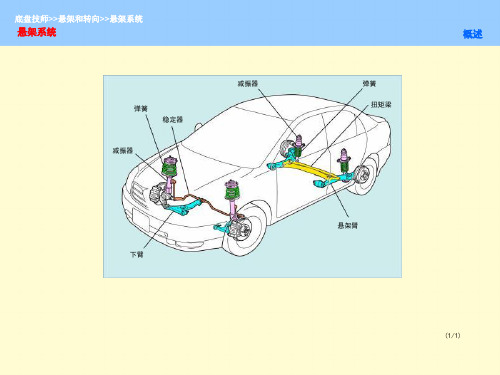
一、悬架系统的组成和功能车辆悬架系统是车身(簧载质量m s )和车轮(非簧载质量m t )之间传递一切力和力矩的连接装置的总称,它用于连接车体与车轮,能够将路面对于车轮的垂向作用力、纵向作用力和侧向作用力以及这些作用力传递到车身,缓冲和衰减行驶中产生的车身振动与冲击,以保证车辆能平顺的行驶。
虽然汽车悬架都拥有各种不完全相同的结构形式,但一般都由弹性元件、减振器和导向机构这三大部分构成。
弹性元件主要有钢板弹簧、空气弹簧、螺旋弹簧、橡胶弹簧、油气弹簧以及扭杆弹簧等形式,而现代车辆悬架系统中采用较多的是螺旋弹簧和扭杆弹簧,个别高级轿车会应用空气弹簧。
车辆行驶中,悬架系统中的弹性元件受到冲击产生振动,为了衰减振动,在悬架系统中安装与弹性元件并联的减振器。
液力减振器是汽车悬架系统中采用较多的减振器类型,其工作原理是车轮(或车桥)与车身(或车架)间受振动出现相对运动时,减振器内的活塞相应的做上下移动,减振器腔内的液压油液不停的从一个腔经过不同的孔隙流入另一个腔中。
此时孔壁与液压油液之间的摩擦和液压油液分子之间的内摩擦对振动形成阻尼力,使车辆振动产生的能量转换成油液热能,最后经减振器外壳吸收,随之散发到大气中。
高惠民(本刊编委会委员)曾任江苏省常州外汽丰田汽车销售服务有限公司技术总监,江苏技术师范学院、常州机电职业技术学院汽车工程运用系专家委员,高级技师。
车轮相对于车身(或车架)跳动时,车轮(尤其指转向轮)的运动轨迹要符合一定的规律或要求,否则车辆的操作稳定性和其他行驶性能会受到影响。
二分之一车辆悬架系统的动力学仿真研究
摘 要 :建 立 了二 分 之 一 车 辆 悬 架 系统 的 数 学 模 型 , 应用 MA TL A B / S i mu l i n k建 立 该 系统 的 仿
真模型 , 对车辆以两种速度分别通过 台阶和坡 路 时悬架各 性能指 标的 响应进行 研 究, 分析 不 同路
面激励 、 不同速度对悬架性能的影响 ; 提 出在 悬 架 设 计 时 应 考 虑 车辆 行 驶 在 特 殊 路 面 的 情 况 以 实 现 悬架 参 数 最佳 匹 配 , 从 而 使 悬 架性 能达 到 最优 , 扩 大 悬 架在 更 大 范 围 内的 适 应 性 和 实用 性 。
关 键 词 :汽 车 ;悬 架 ;路 面激 励 ;MA TI AB / S i mu l i n k ;仿 真 分 析 中图分类号 : U4 6 1 . 1 文献 标 志 码 : A 文章编号 : 1 6 7 1 —2 6 6 8 ( 2 0 1 5 ) O 1 —0 0 0 5 —0 4
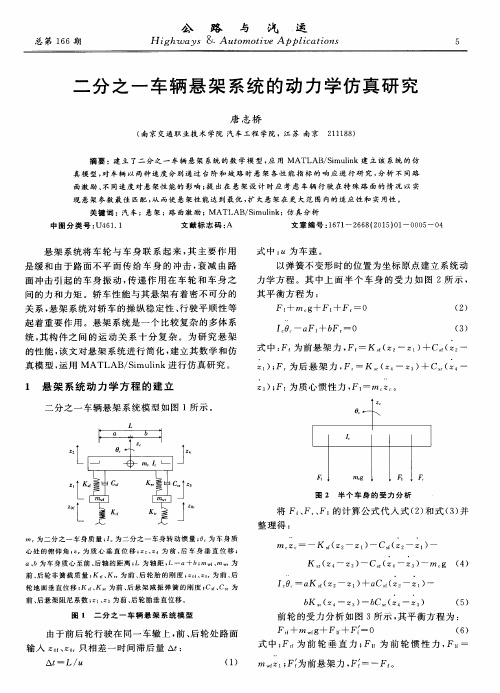
二 分之一 车 辆悬 架系 统模 型如 图 1所示 。
z 3 ) ; FI 为质 心惯 性力 , F1 一 z 。
c
e 一
\
l
,
mc g
一 句
图 2
半 个 车 身 的 受 力 分 析
L
m 为 二 分 之 一 车 身 质 量 ; J 为 二 分 之 一 车 身转 动 惯 量 ; 0 为 车 身 质 心 处 的俯 仰 角 ; 为 质心 垂直位 移 ; z z 、 z 为 前 、 后 车身垂 直 位移 ; n、 b为 车 身 质 心 至 前 、 后 轴 的距 离 ; L为轴 距, L— n +b ; m m 为 前、 后轮非 簧载质量 ; K “ K 为前 、 后轮胎 的刚度 ; Z o f 、 o 为 前 、 后
汽车底盘悬架类型与设计的要点
汽车底盘悬架类型与设计的要点摘要:近年来,我国汽车的普及率逐步提高,而且汽车的销量节节攀升,带动我国汽车相关行业发展,同时也促进我国汽车设计显著提升。
汽车作为日常生活中使用的最频繁的代步工具,现在人民们对汽车的舒适性与稳定性提出更高的要求。
通过优化汽车底盘悬架结构设计,能对汽车行驶的舒适性与安全性有很大提高,能让汽车行业发展更好的满足人民对汽车使用的需求。
基于此,本文主要对汽车底盘悬架结构设计要点进行简要介绍,希望对汽车从业人员或者对此方面感兴趣的人员有参考价值。
关键词:汽车底盘;悬架结构;麦弗逊汽车底盘悬架的工作就是让车辆的轮胎与路面的摩擦力最大限度的增加,这样能够提供良好的车辆操纵性与稳定性。
我们平常开车行驶与路面时,路面不是百分百平整的,经常会是去凹凸不平,这种路面作用在车轮上,从而发生车轮的颠簸。
如果此时车轮直接与车身连接一起,车轮的颠簸直接就会传递到车身,造成很糟糕的驾乘体验。
那么我们可以设计一个车轮与车架的中间结构,就是悬架结构,能够起到了吸收竖直方向的车轮加速动能作用。
车轮的垂直加速力先通过悬架结构一部分的吸收与释放,最后一小部分才传到在传到车架上,这样避免车轮在颠簸的路面上出现车轮离开地面的状态。
通常我们常见的悬架系统主要包含减振器、稳定杆、弹簧、导向连接件等零件组成。
一个良好的悬架设计能够很好匹配路面的隔离性能、轮胎的抓地性能、转弯的性能。
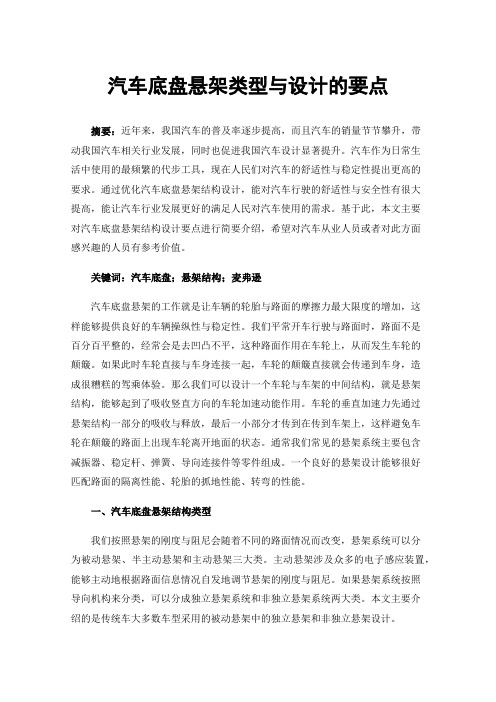
一、汽车底盘悬架结构类型我们按照悬架的刚度与阻尼会随着不同的路面情况而改变,悬架系统可以分为被动悬架、半主动悬架和主动悬架三大类。
主动悬架涉及众多的电子感应装置,能够主动地根据路面信息情况自发地调节悬架的刚度与阻尼。
如果悬架系统按照导向机构来分类,可以分成独立悬架系统和非独立悬架系统两大类。
本文主要介绍的是传统车大多数车型采用的被动悬架中的独立悬架和非独立悬架设计。
(一)非独立悬架系统如图1所示,非独立悬架系统简单的理解就是前轮或者后轮的左右两个轮子会相互作用,左边的轮子会受到右边的轮子的影响。
培训悬架和转向课件
活塞速度
活塞速度
高(坚固)
中(跑车)
低(软)
低(软)
中(跑车)
高(坚固)
底盘技师>>悬架和转向>>悬架系统
减振器
概述
(1/1)
2. 类型
按作用划分
单作用
按结构划分
按工作介质分
多作用
单筒
双筒
液压
充气
减震器规格
底盘技师>>悬架和转向>>悬架系统
减振器
结构和操作
(1/4)
活塞杆
杆导
油封
回弹限位块
特性
(2/4)
2. 阻尼力和弹簧刚性控制
(1) 防后坐控制
(2) 防侧倾控制
(3) 防点头控制
(4) 高速控制
(5) 变速后坐控制
N
D
底盘技师>>悬架和转向>>EMS和空气悬架
EMS(电子调节悬架)和空气悬架
特性
(3/4)
(6) 半主动控制
粗糙路面控制
纵倾控制
跳动控制
底盘技师>>悬架和转向>>EMS和空气悬架
滚动膜
6. 空气弹簧
底盘技师>>悬架和转向>>悬架系统
减振器
概述
(1/1)
弹簧
轮胎
减振器
悬架连杆和车桥
不带减振器
带减振器
时间
振幅
底盘技师>>悬架和转向>>悬架系统
减振器
概述
(1/1)
1.工作原理
1. 工作原理
节流孔
活塞
阀
汽车电控悬架系统资料
电控悬架系统能够根据汽车行驶的各种工况,自动调整减振器阻尼系 数和弹簧刚度,防止汽车急速起步或急加速时的“后蹲”;防止紧急 制动时的“点头”;防止汽车急转弯时的车身横向摇动;防止汽车换 档时的车身纵向摇动等,提高行驶平顺性和操纵稳定性。
3
汽车电子控制技术 课件
任务一 汽车电控悬架系统的故障诊断与维修
控制原理
减振器阻尼大小的调节是通过改变减振器阻尼孔截面积的大小 得以实现。减振器阻尼调节杆连接的转阀上有三个阻尼孔,悬 架控制执行器通过控制杆带动转阀旋转,使转阀上的小孔与活 塞杆上的小孔接通或切断,从而增加或减少减振器上下油室之 间的过流而积,达到调节减振器阻尼的目的。
23
汽车电子控制技术 课件
任务一 汽车电控悬架系统的故障诊断与维修
乘坐舒适性的要求。
汽车空调自问世以来经过几十年的发展,已经由最
初的奢侈品成为必需品,是汽车舒适度的一个重要体现,
同时,又是影响汽车安全性的重要因素。
1
汽车电子控制技术 课件
项目五 汽车行驶舒适性控制系统
任务一 汽车电控悬架系统的故障诊断与维修
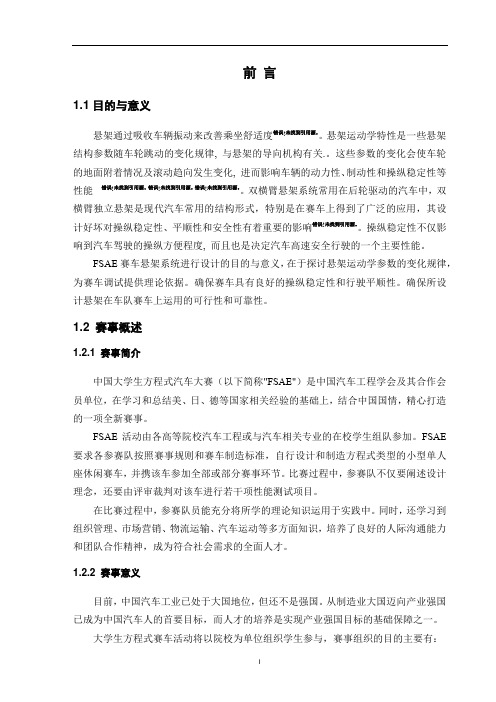
知识目标 1.了解汽车电控悬架系统的分类及功能 2.掌握弹簧刚度控制系统的组成及控制原理 3.掌握减振器阻尼控制系统的组成及控制原理 4.掌握车身高度控制系统的组成及控制原理 能力目标 1.学会检查电控悬架系统的控制功能 2.能够对电控悬架系统的常见故障进行诊断与排除
14
汽车电子控制技术 课件
任务一 汽车电控悬架系统的故障诊断与维修
五、电控悬架系统的主要构件
空气压缩机
干燥器
电控悬架主要执行器
高度控制阀 排气电磁阀
继电器
空气弹簧
汽车悬架运动学与动力学概述

拖曳臂式悬架作为一种半独立悬架,在一些轿车的后悬上也获得了较多的应用。此外,多轴汽车还多 采用平衡悬架,包括等臂式平衡悬架和摆臂式平衡悬架[1]。
悬架根据其刚度和阻尼是否可调,又可分为被动悬架、半主动悬架和主动悬架。被动悬架的刚度和阻 尼均不可调,半主动悬架的阻尼可调但刚度不可调,主动悬架的刚度和阻尼均可调[1]。半主动悬架和主动 悬架是控制技术在汽车悬架上应用的结果,通过主动调节悬架的性能来获取最佳减振状态,提高乘坐舒适 性。国外很多公司已开展了对半主动悬架和主动悬架的研究试验,并逐渐应用于实际车辆上[1]。王国丽、 顾亮等综述了车辆主动悬架技术的现状,并指出了其发展方向[8]。
28.2 悬架发展技术现状
28.2.1 悬架类型概述
悬架通常按导向机构的结构特点分为非独立悬架和独立悬架两大类。介于二者之间,还有一种通常应 用于汽车后悬架的半独立悬架— — 拖曳臂式悬架(又称复合纵臂式后支持桥悬架)[2][3]。非独立悬架的结构特 点是两侧的车轮由一根整体式车桥相连,车轮连同车桥一起通过弹性悬架悬挂在车架或车身的下面,当一 侧车轮跳动时会影响另一侧车轮的运动[1]。独立悬架则是每一侧的车轮单独地通过弹性悬架悬挂在车架或 车身的下面,因此两侧车轮的跳动相对独立,互不影响[1]。在拖曳臂式半独立悬架中,两侧车轮的拖曳臂 通过一根扭转梁连接,因而可使两侧车轮的运动具有一定的独立性[3]。
汽车悬架系统设计基础理论
技术创新238 2015年10期汽车悬架系统设计基础理论张宇李学猛长城汽车股份有限公司技术中心,河北保定 071000摘要:悬挂系统就是指由车身与轮胎间的弹簧和避震器组成整个支持系统。
悬挂系统应有的功能是支持车身,改善乘坐的感觉,不同的悬挂设置会使驾驶者有不同的驾驶感受。
外表看似简单的悬挂系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。
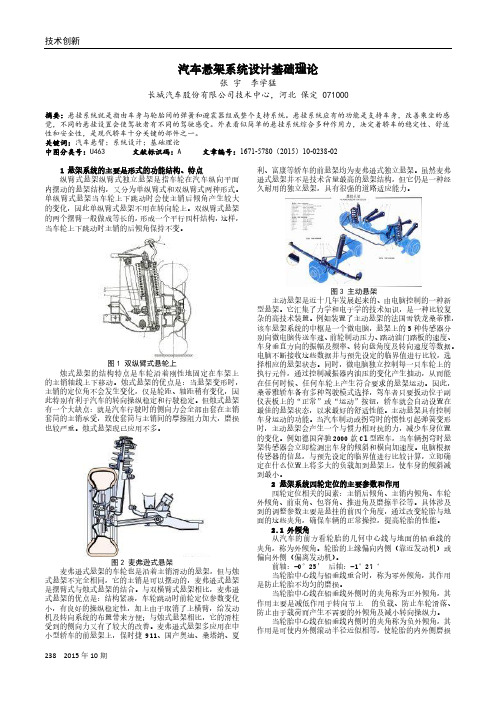
关键词:汽车悬臂;系统设计;基础理论中图分类号:U463文献标识码:A 文章编号:1671-5780(2015)10-0238-021 悬架系统的主要是形式的功能结构、特点纵臂式悬架纵臂式独立悬架是指车轮在汽车纵向平面内摆动的悬架结构,又分为单纵臂式和双纵臂式两种形式。
单纵臂式悬架当车轮上下跳动时会使主销后倾角产生较大的变化,因此单纵臂式悬架不用在转向轮上。
双纵臂式悬架的两个摆臂一般做成等长的,形成一个平行四杆结构,这样,当车轮上下跳动时主销的后倾角保持不变。
图1 双纵臂式悬轮上烛式悬架的结构特点是车轮沿着刚性地固定在车架上的主销轴线上下移动。
烛式悬架的优点是:当悬架变形时,主销的定位角不会发生变化,仅是轮距、轴距稍有变化,因此特别有利于汽车的转向操纵稳定和行驶稳定。
但烛式悬架有一个大缺点:就是汽车行驶时的侧向力会全部由套在主销套筒的主销承受,致使套筒与主销间的摩擦阻力加大,磨损也较严重。
烛式悬架现已应用不多。
图2 麦弗逊式悬架麦弗逊式悬架的车轮也是沿着主销滑动的悬架,但与烛式悬架不完全相同,它的主销是可以摆动的,麦弗逊式悬架是摆臂式与烛式悬架的结合。
与双横臂式悬架相比,麦弗逊式悬架的优点是:结构紧凑,车轮跳动时前轮定位参数变化小,有良好的操纵稳定性,加上由于取消了上横臂,给发动机及转向系统的布置带来方便;与烛式悬架相比,它的滑柱受到的侧向力又有了较大的改善。
麦弗逊式悬架多应用在中小型轿车的前悬架上,保时捷911、国产奥迪、桑塔纳、夏利、富康等轿车的前悬架均为麦弗逊式独立悬架。
浅析汽车底盘主动悬架控制方法

浅析汽车底盘主动悬架控制方法1. 引言1.1 概述汽车底盘主动悬架控制方法是一种能够提高车辆悬挂系统性能和舒适性的技术。
随着汽车工业的发展和人们对行车舒适性和安全性要求的提高,底盘主动悬架控制方法逐渐受到重视。
底盘主动悬架控制方法通过感知路况和车辆运动状态,采取相应的控制策略来调节悬架系统的工作状态,以提高车辆的操控性、稳定性和舒适性。
不同类型的底盘主动悬架控制方法采用不同的技术手段和控制算法,如电磁悬架、液压悬架、空气悬架等。
本文将重点介绍各种主动悬架控制方法的原理、特点和应用领域,以及不同方法之间的优缺点比较。
通过对底盘主动悬架控制方法的深入研究和分析,可以为汽车制造商和研发人员提供参考,促进底盘主动悬架技术的进一步发展和应用。
在未来,底盘主动悬架控制方法将在汽车行业发挥越来越重要的作用,为驾驶员提供更安全、舒适的驾驶体验。
1.2 研究背景汽车底盘主动悬架控制方法作为汽车底盘控制技术的一种重要手段,具有极其重要的应用价值和发展前景。
随着汽车工业的飞速发展,人们对汽车的舒适性、安全性和性能要求越来越高,传统的被动悬架系统已经不能满足人们的需求。
研究和开发底盘主动悬架控制方法成为了当前汽车工程领域的热点之一。
底盘主动悬架控制方法的研究背景主要包括以下几个方面。
随着汽车性能的提升,底盘控制技术对于提高汽车的行驶稳定性、通过性和舒适性等方面起到了至关重要的作用。
随着电子技术的不断发展和应用,底盘主动悬架控制方法可以通过精确控制悬架系统的工作状态,提高汽车的行驶性能和安全性。
底盘主动悬架控制方法可以实现不同路况下的智能调节,提高汽车通过不同路面时的适应能力和稳定性。
底盘主动悬架控制方法的研究还可以促进汽车工业的发展,推动汽车制造技术的进步,为人类社会的可持续发展做出积极贡献。
深入研究和开发底盘主动悬架控制方法具有重要的现实意义和理论意义。
1.3 研究目的研究目的是为了深入了解汽车底盘主动悬架控制方法的原理和应用,探讨不同类型的悬架控制方法的优缺点,为汽车制造商和工程师提供有效的参考和指导。
大学生方程式赛车悬架设计
在比赛过程中,参赛队员能充分将所学的理论知识运用于实践中。同时,还学习到组织管理、市场营销、物流运输、汽车运动等多方面知识,培养了良好的人际沟通能力和团队合作精神,成为符合社会需求的全面人才。
在天马行空的幻想大脑一片空白的开始兴奋的初步设计激烈的争执毫无方向的采购和加工无可奈何的妥协令人抓狂的一次次返工绞尽脑汁的解决难题之后参与者能获得的不仅仅是catiaugansys以及焊接定位机加工技能更有汽车工程师的基本素养和丰富实践经验
前言
1.1目的与意义
悬架通过吸收车辆振动来改善乘坐舒适度[1]。悬架运动学特性是一些悬架结构参数随车轮跳动的变化规律,与悬架的导向机构有关.。这些参数的变化会使车轮的地面附着情况及滚动趋向发生变化,进而影响车辆的动力性、制动性和操纵稳定性等性能[2][3][4]。双横臂悬架系统常用在后轮驱动的汽车中,双横臂独立悬架是现代汽车常用的结构形式,特别是在赛车上得到了广泛的应用,其设计好坏对操纵稳定性、平顺性和安全性有着重要的影响[5]。操纵稳定性不仅影响到汽车驾驶的操纵方便程度,而且也是决定汽车高速安全行驶的一个主要性能。
1.2.2赛事意义
目前,中国汽车工业已处于大国地位,但还不是强国。从制造业大国迈向产业强国已成为中国汽车人的首要目标,而人才的培养是实现产业强国目标的基础保障之一。
大学生方程式赛车活动将以院校为单位组织学生参与,赛事组织的目的主要有:
一是重点培养学生的设计、制造能力、成本控制能力和团队沟通协作能力,使学生能够尽快适应企业需求,为企业挑选优秀适用人才提供平台;
高等车辆学2-车辆悬架与转向-2
2.52.5.1 操纵稳定性一般概念汽车操纵稳定性包含的内容汽车操纵稳定性包含的内容横摆角速度频率响应特性车辆坐标系与转向盘角阶跃输入下的时域响应 车辆坐标系车辆坐标系与转向盘角阶跃输入下的时域响应稳态响应特性车辆坐标系与转向盘角阶跃输入下的时域响应稳态响应特性的三种类型车辆坐标系与转向盘角阶跃输入下的时域响应 瞬态响应特性角阶跃输入前后,直线行驶与等速圆周行驶这两个稳态运动之取决于汽车的结构参数进入稳态所经历的时间σ操纵稳定性的研究方法汽车为开路系统人-汽车系统为闭路系统2.5.2轮胎坐标系轮胎坐标系αOXY车轮平面车轮行驶方向正翻转力矩T正地面侧向反作用力FY车轮旋转轴线正侧偏角TZ正TY正外倾角γZ侧偏角α轮胎接地印迹中心的位移方向与X轴的夹角外倾角γ过轮胎坐标系原点的垂线与车轮平面的夹角轮胎的侧偏现象和侧偏力-侧偏角曲线侧偏力F轮胎的侧偏现象和侧偏力-侧偏角曲线轮有侧向弹性时,没有达到侧向附着极限,车轮行驶方向也将偏离FYyFαuFYyF轮胎的侧偏现象和侧偏力-侧偏角曲线F轮胎结构、工作条件对侧偏特性的影响轮胎的尺寸、型式和结构参数的影响大尺寸胎,子午线胎,钢丝子午线轮胎,k大小越小回正力矩Z回正力矩车轮静止时受到侧向力车轮运动时受到侧向力(侧向力较小)车轮运动时受到侧向力(侧向力较大)FeFYe—轮胎拖距eY轮胎拖距变大FYe轮胎拖距反而变小车轮运动时受到侧向力(侧向力很大)轮胎的Y车轮外倾角γ与外倾侧向力FγYFyF+OXYZ-向外滚开的趋势轮胎的F Y与γ、α的关系外倾侧向力γγγkFY=kγ-外倾刚度轮胎的Y侧偏角2.5.3线性二自由度汽车模型运动微分方程线性二自由度汽车模型运动微分方程建模中假设线性二自由度汽车模型运动微分方程两轮汽车模型及车辆坐标系范围内;不计地面切向力F X、外倾侧向、回正力矩T Z、垂直载荷的变化对轮胎侧偏刚度的影响yFγ线性二自由度汽车模型运动微分方程运动学分析rωv−rωuvay+=&同理求得线性二自由度汽车模型运动微分方程二自由度汽车动力学分析线性二自由度汽车模型运动微分方程二自由度汽车动力学分析线性二自由度汽车模型运动微分方程二自由度汽车动力学分析前轮角阶跃输入下的稳态响应稳态响应(前轮角阶跃输入下的稳态响应稳态横摆角速度增益前轮角阶跃输入下的稳态响应稳态响应的三种类型前轮角阶跃输入下的稳态响应 稳态响应的三种类型前轮角阶跃输入下的稳态响应稳态响应的三种类型影响前轮角阶跃输入下的稳态响应几个表征稳态响应的参数前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应前轮角阶跃输入下横摆角速度的瞬态响应前轮角阶跃输入下的瞬态响应瞬态响应的稳定条件横摆角速度频率响应特性对微分方程进行傅里叶变换,得()()ωδωωδj B+()()ωδωωr横摆角速度频率响应特性评价横摆角速度频率响应的五个参数为共振时的增幅比。
汽车主动悬架及控制方法的研究
汽车的悬架系统是车辆的重要组成部分,汽车悬架性能的好坏直接影响汽车行驶的平顺性和操纵稳定性,传动的被动悬架系统,由于参数不可调节,对多变环境中工作的汽车难以满足期望的性能要求。
因此,为了克服被动悬架对汽车性能改善的限制,近年来出现了主动悬架系统。
主动悬架能够根据工况变化,实时主动地调整和产生所需的悬架控制力,以抑制车身的振动,使悬架处于最优减振状态,达到同时改善汽车行驶平顺性和操纵稳定性的目的。
近年来随着机械动力学、测控技术、电子技术等学科的快速发展,尤其是信息科学中对模糊控制、人工神经网络、自适应控制、最优控制等的研究,悬架系统控制技术得到了快速发展。
本文对汽车的模糊控制、自适应控制、神经网络控制、智能控制以及复合控制等多种控制方法进行了叙述,并以模糊控制在汽车主动悬架中的应用为例,详细叙述了模糊控制的有关知识,希望可以加深对汽车主动悬架及相关控制方法和策略的研究。
关键词:主动悬架,控制策略,模糊控制Automotive suspension system is an important part of the vehicle, it’s performanc e has a direct impact on the exercise of the car ride and handling stability. due to the passive suspension system parameters can not be adjusted for the changing work environment ,it is difficult to meet the desired performance requirements, however,Active suspension can take the initiatives to adjust the suspension in real time according to changing conditions ,and produces the desired control to suppress the vibration of the body, so that the optimal damping suspension can be kept in the best state to improve vehicle ride comfort and handling stabilitypurposes simultaneously. In recent years, along with the development of the me dynamics, measurement and control technology, electronic technology disciplines, and the rapid development of information science, especially the studies of the fuzzy control, artificial neural networks, adaptive control, optimal control, suspension system control technology which is in modern theoretical guidance, becomes more perfect, suspension control system technology has developed rapidly, the vehicle fuzzy control, adaptive control, neural network control, intelligent control and composite control and other control methods are In this paper ,in order to deepen the understanding of vehicle active suspension control methods and strategies and related researches,the fuzzy control in automotive active suspension system was described as an example in this paper .Key words : active suspension, fuzzy Control, control strategy目录前言 (1)1车辆悬架概述 (2)1.1车辆悬架的定义、作用及性能要求 (2)1.1.1车辆悬架的定义 (2)1.1.2车辆悬架的作用 (2)1.1.3车辆悬架系统的性能要求 (3)1.2车辆悬架的组成 (3)1.2.1弹簧 (3)1.2.2减震器 (4)1.2.3稳定杆 (4)1.3车辆悬架的类型 (4)1.3.1被动悬架 (5)1.3.2半主动悬架 (5)1.3.3主动悬架 (6)1.3.4主动悬架的优点 (7)1.3.5主动悬架主要元件及工作原理 (8)1.4主动悬架的控制功能 (11)1.4.1车速路面感应控制 (11)1.4.2车身姿态控制 (12)1.4.3车身高度控制 (13)1.5主动悬架研究与发展状况 (14)1.5.1主动悬架的研究现状 (14)1.5.2主动悬架发展状况 (15)2主动悬架控制及策略 (18)2.1自适应控制 (18)2.2神经网络控制 (19)2.3 PID控制 (20)2.4最优控制 (22)2.5鲁棒控制 (24)2.6遗传算法 (24)2.7复合控制 (25)3模糊控制在主动悬架中的应用 (26)3.1模糊控制的技术原理 (26)3.1.1模糊控制系统的组成 (26)3.1.2模糊控制基本原理 (27)3.1.3模糊控制器的结构设计 (31)4总结 (33)致谢 (34)参考文献 (35)前言随着汽车工业的发展,人们对汽车的乘坐舒适性和操纵稳定性提出了更高的要求,而车辆悬架决定和影响着车辆行驶的平顺性、操纵稳定性和乘坐舒适性。
汽车底盘系统分层式协调控制
AUTO PARTS | 汽车零部件1 引言车辆底盘是一个多子系统的组合,其结构是一个复杂的非线性系统。
目前,车辆悬挂技术已经不能很好地适应车辆的乘坐舒适性。
而在此背景下,多个部件运行间存在着强烈的耦合关系,这就使得多部件运行必须以分布式方式进行,而非单纯依靠局域变量。
这类问题通常会造成控制效果降低,进而影响到控制的稳定性,给控制的实用化带来很大的难度。
为此,有必要从悬架系统、转向系统和制动系统三个方面入手,分别对涉及车辆运行和平顺的悬架系统、转向系统和制动系统进行分点研究,也就是对整个车辆底盘系统进行分层式协同控制。
2 底盘各系统之间的动力耦合关系底盘各系统在分别针对悬挂系统的控制器设计时,不仅要考虑到系统的可靠性,而且要考虑到模型误差、部件老化、环境变化等因素。
该方法无需考虑其与EPS、刹车系统的交互作用,在前期的研究中,不但可以在悬架系统的控制阶段,还可以对系统中的元件进行优化,从而提高系统的可靠性。
对模型和控制器进行了某种程度的降阶;由于EPS独立的控制策略没有考虑EPS与悬挂、刹车等多个环节的交互作用,使得EPS独立控制策略的设计变得更加简单。
在此基础上,对控制器进行了优化,实现了对控制器的稳态控制。
该控制系统具有自身的鲁棒特性,即使在系统的参数发生变化时,也能维持良好的状态。
汽车底盘系统的各个子系统是相互制约和影响的,在此基础上,通过对汽车底盘系统的力学分析,能够明确系统中的各个要素对系统的作用,进而判断出各个要素的相对重要程度,为进一步开展汽车底盘系统的分层协同控制提供依据。
2.1 汽车悬架系统当车辆在行驶过程中存在侧向的加速时,车辆自身会向侧上方倾斜,不论是纵向加速度还是横向加速度,都会引起车辆车轮在垂直方向上的偏差,进而影响车辆的转向和制动。
但是,如果结构的阻尼超过一定的限度,则会使结构变成刚性,从而无法达到减震的目的。
因而,在选用阻尼体系时,必须充分考虑其正常承载能力、位移需求、屈服强度、制动变形、耗能及变形后的恢复能力等因素。
高等教育出版社 汽车转向系构造与维修2
•
•
• •
• ห้องสมุดไป่ตู้ •
③转向减振器的检修 用检视法检查转向减振器应无漏油现象。对其性能检 查时,应符合技术标准。上海桑塔纳LX型减振器,最大行程为 556mm,最小行程为344.5mm,最大阻尼载荷为560N,最小阻尼 载荷为180N,否则换用新减振器总成,检查减振器两端衬套老 化、破裂、损伤,应及时换用新件。 (3)转向器及其操纵机构装配与调整 ①安装转向盘时,车轮必须处于直行位置上,转向灯开 关应放在中间位置,以防分离爪通过接触环上的簧片时引起破 损。 ②转向器凸缘盘推靠到主动齿轮上,不得留有间隙,用 夹箍夹紧,不允许用手掰开夹箍的开口,其开口应朝外安装。 ③紧固转向柱管时,应先将断开螺栓拧至螺栓头,然后 再拧紧圆柱螺栓。 ④各螺栓,螺母应按规定力矩拧紧。
• • •
(2)主要零部件的检修 ①转向操纵机构的检修 用百分表检测转向柱的直线度误差不大于0.01mm,否 则应予以校正,检查接触环、弹簧、转向柱驱动销、橡胶衬套、 塑料衬套及所有密封套橡胶支承环等,若老化、破裂、磨损严 重等,一律换用新件。 • ②转向器的检修 • 用检视法检查转向器外壳应无裂纹及磨损,主动齿轮 与齿条应运动灵活。无卡滞现象,若无法修复,必须更换转向 器总成,齿条密封罩及防尘套若老化、破损及补偿机构弹簧等 失效,一律换用新件、自锁螺栓,螺母一经拆卸,必须换用新 件。为确保转向装置安全可靠。转向器各零部件不允许进行焊 修或整形。
•
•
(4)转向节臂与梯形臂 转向直拉杆通过转向节臂和转向节相连,转向横拉杆 两端通过左、右梯形臂与转向节相连,转向节臂和梯形臂的锥 形柱部分与转向节锥形孔相配合,用键防止相对转动,端部用 螺母紧固,并用开口销锁住,另一端的锥形孔和相应的拉杆球 头锥形部位相配合,也用螺母紧固后,插入开口销锁住螺母。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转向器类型
循环球式 齿轮齿条式
2.2.4 转向加力装置
转向加力装置概述
加力装置——将发动机输出的部分机械能转化 为压力能,提供给转向系统助力的装置
由机械转向器、转向动力缸和转向控制阀组成 气压转向加力装置
系统工作压力≯0.7MPa 用于前轴载质量3~7t并采用气压制动系统的车辆
轮胎
轮胎的作用
缓和地面冲击并衰减振动,保证乘坐舒适性 和行驶平顺性
保证车轮和路面有良好的附着性,提高车辆 的牵引性、制动性和通过性
承受车辆的重力,传递其它方向的力和力矩
2.1.2 车轮与轮胎
车轮的功用
支承整车 缓和由路面传来的冲击力 通过轮胎与路面间的附着作用产生驱动力和
前轮外倾角 前轮旋转平面与纵向平面的夹角α,目的使轮
胎磨损均匀和减轻轮毂外轴承负荷 一般 α为1°左右
转向轮定位参数
前轮前束
两轮后边缘距离A与前边缘距离B之差A-B, 可使车轮正常滚动,减少轮胎磨损
一般 A-B= 0~12mm 后轮的外倾角和前束
增加车辆的横向稳定性 减小轮胎磨损 一般不可调整
γ角越大,方向稳定性越好,自动回正作用 也越强,但转向越沉重。一般 γ≯2°~ 3°
现代汽车轮胎气压降低,稳定力矩增大,γ 值减小(接近于零值或负值)
转向轮定位参数
主销内倾角
主销轴线和地面垂直线在汽车横向平面内夹角 β,使车轮有回正作用,一般 β≯8°
主销轴线与地面交点到车轮接地点中心的距离 c,可使转向轻便,一般 c=40~60mm
2.2.5 电动助力转向系统
EPAS系统优点(与液压助力转向系统比较)
节省空间(省略了液压泵和辅助管路) 质量小(只增加一套电动机和减速机构) 节省动力(电动机只在需要时工作) 容易集成(部件少)
EPAS系统缺点
系统成本增加(电动机和减速机构) 减速机构、电动机等部件产生的摩擦力和惯
转向盘自由行程
转向盘空转阶段——克服转向系统内部摩擦,使各传动件运动 到间隙完全消除
转向盘自由行程——转向盘在空转阶段的角行程 任一方向的自由行程≯10°~15°
2.2.1 转向系基本概念
希望转向时,所有车轮均纯滚动 两侧转向轮偏转角之间的理想关系式
双轴汽车 内转向轮偏转角β和 外转向轮偏转角α理想关系式 cotα = cot β + B L
动力转向系统
加力装置主要部件
2.2.1 转向系基本概念
转向器角传动比 iω1
转向盘转角增量与相应转向摇臂转角增量之比 货车(16~32);轿车(12~20)
转向传动机构角传动比 iω2
转向摇臂转角增量与相应转向节转角增量之比
转向系统角传动比 iω(= iω1 iω2)
转向器
循环球式转向器
转向轴12→转向螺杆3→(钢球5)→转向螺 母4→齿扇轴20
传动效率可达到90%~95%,逆效率也较高 使用寿命长 传动比可变 结构较复杂 用于各类汽车
2.2.3 转向传动机构
与非独立悬架配用的转向传动机构
转向传动机构的组成和布置
转向摇臂2、转向直拉杆3、转向节臂4和转向梯形 (转向横拉杆6和左、右梯形臂5)
2
+
a
2 zw
⎤1 / ⎥⎦
2
总加权振级 Law Law = 20lg(aw / a0 )
辅助评价法:当峰值系数 > 9时采用
2.3 车辆行驶平顺性
研究目的:有效控制汽车振动系统的动态特性 “路面-汽车-人”系统
输入——路面不平度;车速;发动机、传动系和车轮 等旋转部件的非平衡干扰
假定计算载荷
Fh=400N,则转向盘转矩 M h = 200Dsw 根据车辆在静止状态作原地转向的阻力矩
MR
=
f 3
G13 p
换算到转向盘的转向手力
Fh
=
2L1M R L2 Dswiωη+
2.3 车辆行驶平顺性
2.3.1 平顺性的评价方法 2.3.2 路面不平度的统计特性 2.3.3 汽车振动系统的简化 2.3.4 双质量系统的振动
用水准仪或路面计可以得到路面不平度函数
路面不平度的功率谱密度
路面不平度的功率谱密度函数Gq(n)
Gq(n)的拟合公式
Gq
(n)
=
Gq
( n0
)
⎛ ⎜
⎝
n n0
⎞−W ⎟ ⎠
速度功率谱密度 Gq&(n) = (2πn)2Gq(n)
加速度功率谱密度 Gq&&(n) = (2πn)4Gq (n)
液压转向加力装置
系统工作压力可高达10MPa以上
2.2.4 转向加力装置
液压转向加力装置分类
常压式 常流式
转向控制阀分类
滑阀式 转阀式
半整体式动力转向器
由机械转向器5和转向控制阀4构成
转向动力缸单独布置
与备轮架液 压升降装置 共用一套供 能装置(由
转向油罐2和 转向液压泵3 组成)
循环球式转向器(效率75%~85%) 蜗杆滚轮式转向器 蜗杆指销式转向器 η+和η-之差,最好保持在10%左右
EPAS系统的关键部件
转矩传感器 电动机 减速机构 电子控制单元
转向系计算载荷的确定
转向盘上手力 Fh 与 下列因素有关
转向轴负荷/轮胎弹性/前轮定位参数/车速
制动力 汽车转弯时产生平衡离心力的侧抗力 产生自动回正力矩,保持直线行驶稳定性 承担越障和起到提高通过性的作用
轮胎
轮胎分类
有内胎的充气轮胎 有内胎的充气轮胎
轮胎花纹 轮胎内胎
无内胎的充气轮胎 活胎面轮胎
胎面可更换
轮胎规格的标记方法
车轮
车轮的类型
辐板式车轮 辐条式车轮
转向轴助力式 齿轮助力式 齿条助力式 拉杆助力式
EPAS系统根据车速进行控制 全速助力型——在所有的车速
范围内都提供转向助力 低速助力型——仅在某个低速
范围内提供转向助力,如 30km/h或45km/h以下
机械式转向器方案分析
机械式转向器分类
齿轮齿条式转向器(正效率90%,逆 效率较60%~70%)
2 车辆悬架与转向
2.1 车桥与车轮 2.2 转向系 2.3 车辆行驶平顺性 2.4 悬架系 2.5 车辆操纵稳定性
2.1 车桥和车轮
2.1.1 车桥 2.1.2 车轮与轮胎
转向轮定位参数
主销后倾角
主销轴线和地面垂直线 在纵向平面内夹角γ
主销轴线与地面交点a位于车轮接地点b前, 可以增加汽车直线行驶的稳定性和转向后使 前轮自动回正
平顺性的评价方法
基本评价法
计算各轴向加权加速度均方根值aw
滤波网络法或频谱分析法
1
∫ aw
=
⎡1 ⎢⎣T
T 0
aw2
(t
)dt
⎤ ⎥⎦
2
1
∫ 或
aw
=
⎡ ⎢⎣
80
W
0.5
2(
f
)Ga (
f
)df
⎤2 ⎥⎦
三个方向加权加速度均方根值
( ) ( ) aw
=
⎡ ⎢⎣
1.4axw
2+
1.4a yw
2.2.1 转向系基本概念 2.2.2 转向器及转向操纵机构 2.2.3 转向传动机构 2.2.4 转向加力装置 2.2.5 电动助力转向系统 2.2.6 设计要点
2.2.1 转向系基本概念
汽车转向系统的类型和组成
机械转向系统
转向操纵机构 转向器 转向传动机构
2.2.4 转向加力装置
常流式转向加力装置的结构布置方案
整体式(转向器9+动力缸10+控制阀8) 半整体式(转向器9+控制阀8、动力缸10) 转向加力器(转向器9、动力缸10+控制阀8)
转向加力器
由转向控制阀5和转向动 力缸6组成
SH380货车的转向加力器
整体式动力转向器
例:捷达轿车
ISO2631和GB/T4970
人体坐姿受振模型
3个输入点、12个方向
人体最敏感频率范围
Zs——4~12.5Hz Xs和Ys——0.5~2Hz
2.3.2 路面不平度的统计特性
路面不平度的功率谱密度
路面不平度函数
路面相对基准平面的高度 q ,沿道路走向长度 I 的变化 q(I)称为路面不平度函数
轮辋的类型
国产轮辋规格的表示方法
轮胎
轮胎规格的标记方法(货车)
5.60 - 13 4PR
轮胎结构型式 轮辋直径,in 轮胎宽度,in
轮胎规格的标记方法(轿车)
175 / 65 R 14 82 H 速度记号 负荷指数 轮辋直径,in 子午线轮胎 扁平比,% 轮胎宽度,mm
2.2 转向系
性力会影响转向特性
2.2.6 转向系设计要点
设计要求
正确的转向运动规律(没有侧滑) 操纵轻便
操纵力小(轿车<100N,货车< 250N) 转向盘上有“路感”(自动回正)
转向灵敏
转向盘一侧转动圈数不超过1.8~3圈 转向盘空程间隙不超过10º ~ 15º
工作可靠
EPAS系统的类型
转向梯形前置 转向梯形后置
转向器
蜗杆曲柄指销式转向器
单销式/双销式结构
蜗杆曲柄指销式转向器