三维图形几何变换
几何变换的认识和基本原理

几何变换的认识和基本原理几何变换是指通过对平面上的点、线、面进行位置、形状或尺寸上的改变,从而得到一个新的图形。
在计算机图形学和计算机视觉等领域,几何变换是非常重要的基础知识。
本文将介绍几何变换的认识和基本原理。
一、平移变换平移变换是指将一个图形沿着某个方向平行移动一定的距离。
平移变换可以用以下公式表示:[x', y'] = [x + dx, y + dy]其中,(x, y)是原始图形上的一个点,(dx, dy)是平移的距离,(x', y')是平移后得到的新点的坐标。
二、旋转变换旋转变换是指将一个图形绕着某个中心点按照一定的角度旋转。
旋转变换可以用以下公式表示:[x', y'] = [x*cosθ - y*sinθ, x*sinθ + y*cosθ]其中,(x, y)是原始图形上的一个点,θ是旋转的角度,(x', y')是旋转后得到的新点的坐标。
三、缩放变换缩放变换是指将一个图形按照一定的比例因子放大或缩小。
缩放变换可以用以下公式表示:[x', y'] = [s*x, s*y]其中,(x, y)是原始图形上的一个点,s是缩放的比例因子,(x', y')是缩放后得到的新点的坐标。
四、对称变换对称变换是指将一个图形关于某一直线或某一点进行对称。
对称变换可以分为关于x轴对称、关于y轴对称、关于原点对称等。
不同类型的对称变换具体的公式略有不同,但原理都是将图形上的点映射到其关于对称轴的对称位置。
五、仿射变换仿射变换是指将一个图形通过平移、旋转和缩放等基本变换来进行综合变换。
仿射变换可以用以下矩阵表示:[x', y'] = [a*x + b*y + c, d*x + e*y + f]其中,a、b、c、d、e、f为变换矩阵中的参数,(x, y)是原始图形上的一个点,(x', y')是变换后得到的新点的坐标。
计算机图形学-三维图形变换与投影

5.关于yoz面的反射
坐标表示为:
x' x y' y z' z
0 1 0 0 0 0 1 0 0 0 0 1
1 0 变换矩阵为: T 0 0
6.关于zox面的反射
坐标表示为:
x' x y' y z' z
J
z
x y
34
三维复合变换
步骤:
1。J轴绕Z轴转φ 角至yoz平面,成为J1。 2。J1轴绕X轴转γ 角后与z轴平行,成为J2。 3。立体绕J2轴转θ 角 4。从J2返回J1。 5。从J1返回J。
J2 J
J2
z
J1
z
J1
z
J1
x
y
x
y
x
y
35
投影变换
36
投影变换
显示器只能用二维图形表示三维物体,因此三维 物体就要靠投影来降低维数得到二维平面图形 把三维物体转变为二维图形的过程称为投影变换
1 b d 1 T g h 0 0 c f 1 0 0 0 0 1
错切变换
1 b d 1 T g h 0 0
c f 1 0
0 0 0 1
三维错切变换中,一个坐标的变化受另外两个坐
标变化的影响。
如果变换矩阵第一列中元素d和g不为0,产生沿x
同理可得,绕y轴旋转变换:
x ' z sin x cos y' y z ' z cos x sin
z 绕y轴旋转 x
cos 0 T sin 0
0 sin 1 0 0 cos 0 0
立体几何变换学习平移旋转和放缩等立体几何变换方法

立体几何变换学习平移旋转和放缩等立体几何变换方法立体几何变换学习平移、旋转和放缩等立体几何变换方法立体几何变换是一种在三维空间中改变物体位置、方向、形状和大小等属性的方法。
其中,平移、旋转和放缩是最基础的立体几何变换方法。
本文将介绍这三种方法的原理和应用。
一、平移平移是将一个物体在空间中移动到不同的位置,保持其大小和形状不变。
在二维几何中,平移是沿着平行于坐标轴的直线将物体移动到新的位置。
在三维几何中,我们可以通过向量表示物体的平移变换。
在三维空间中,设物体初始位置为P(x,y,z),平移向量为T(a,b,c),则物体移动到新位置P'(x',y',z')后,有以下关系:x' = x + ay' = y + bz' = z + c平移变换可以用于物体的移动和场景的布局。
在计算机图形学中,平移变换通常用于物体的位移,以及相机在场景中的位置变换。
二、旋转旋转是围绕某个中心点将物体按照特定角度进行旋转。
在二维几何中,我们可以通过角度表示旋转的大小,并通过中心点进行旋转变换。
在三维几何中,我们使用旋转矩阵来表示旋转变换。
对于一个物体P(x,y,z)在三维空间中的旋转:x' = x*cosθ - y*sinθy' = x*sinθ + y*cosθz' = z其中,θ表示旋转角度。
旋转矩阵可以通过矩阵乘法的方式来计算,将初始点P(x,y,z)与旋转矩阵相乘,得到旋转后的点P'(x',y',z')。
旋转变换可以用于物体的姿态调整、动画效果的制作等方面。
在计算机图形学中,旋转变换是非常常用的一种变换方法。
三、放缩放缩是通过改变物体的尺寸来进行变换。
在二维几何中,我们通常使用一个比例因子来表示放缩的大小。
在三维几何中,我们可以通过三个比例因子来表示物体在不同维度上的放缩。
对于一个物体P(x,y,z)在三维空间中的放缩变换:x' = kxy' = kyz' = kz其中,k表示放缩因子,可以是正数、负数或零。
图形几何变换
例. 相对直线y=1/2*x的反射变换
Y
Y
Y
原图
X
Y
平移
X
旋转
X
Y Y
反射
X
逆向旋转 X
逆向平移 X
1 0 x cos sin 0 1 0 0 T 0 1 y sin cos 0 0 1 0
0 0 1 0
0 1 0 0 1
cos sin 0 1 0 x
•sin
0
cos 0 0 1 y
0
1
0
p
y
1 0 0 1 1
Y
(4)关于y=x轴对称
x=y p(x, y)
p ' (y, x)
X
p'x 0 1 0 px (d)关于x=y对称
p'
y
1
0
0
p
y
1 0 0 1 1
Y
x=-y (5)关于y=-x轴对称
P(x, y)
X P' (-y, -x)
( e) 关于x=- y对称
px sin( ) py cos( )
写成矩阵表达式为:
p'x cos sin 0 px
p'
y
sin
cos
0
p
y
1 0
0 1 1
当
p'x cos
p'
y
sin
1 0
sin cos
0
0 px
0
p
y
1 1
其逆变换
px cos sin 0 p'x
•sin
0
cos 0
0 1
取 45o,s1 1,s2 2
三维空间几何坐标变换矩阵课件

3
缩放变换的应用:在计算机图形学中,缩放变换 常用于物体的形状调整和场景构建。04坐标变源自矩阵推导过程平移变换矩阵推导
平移变换定义
将点$P(x,y,z)$沿$x$轴、$y$轴 、$z$轴分别平移$t_x$、$t_y$、
$t_z$个单位。
平移变换矩阵
$begin{bmatrix} 1 & 0 & 0 & t_x 0 & 1 & 0 & t_y 0 & 0 & 1 & t_z 0 & 0 & 0 & 1 end{bmatrix}$
02
三维空间几何基础
三维空间坐标系
01
02
03
右手坐标系
在三维空间中,通常采用 右手坐标系,其中x轴正 向向右,y轴正向向前,z 轴正向向上。
坐标原点
三维坐标系的原点O是三 个坐标轴的交点,其坐标 为(0,0,0)。
坐标表示
在三维空间中,任意一点 P的位置可以用一个三元 组(x,y,z)来表示,其中x、 y、z分别是点P在x轴、y 轴、z轴上的投影。
|1000|
```
01
03 02
旋转变换原理及方法
| 0 sin(θ) cos(θ) 0 |
|0001|
旋转变换原理及方法
```
旋转变换的应用:在计算机图形学中,旋转变换常用于物体的姿态调整和场景构 建。
缩放变换原理及方法
缩放变换定义
将三维空间中的点沿着某一方向进行放大或缩小,改变点的形状和大小。
平移变换过程
将点$P$的齐次坐标$(x,y,z,1)$与平 移变换矩阵相乘,得到平移后的坐 标$(x+t_x,y+t_y,z+t_z,1)$。
三维空间旋转变换公式

三维空间旋转变换公式摘要:1.三维空间的基本概念2.三维空间的旋转变换公式3.旋转变换公式的应用4.总结正文:一、三维空间的基本概念三维空间是一个由三个相互垂直的维度组成的空间,通常用长、宽、高三个参数来表示。
在三维空间中,每个点都具有三个坐标值,即x、y、z,它们分别表示该点在三个维度上的位置。
三维空间广泛应用于物理、数学、工程等领域,对于研究和解决实际问题具有重要意义。
二、三维空间的旋转变换公式在三维空间中,旋转变换是一种基本的几何变换,它可以将一个点或一个物体从一个位置旋转到另一个位置。
旋转变换公式可以用来描述这种变换。
假设有一个点P(x, y, z) 在一个以原点为中心,长、宽、高分别为a、b、c 的三维空间中,现在将这个点围绕原点逆时针旋转α角度,那么旋转后的点P"(x", y", z") 可以通过以下公式计算:x" = xco sα - zsinαy" = ycosα + xsinαz" = zcosα + ysinα其中,α表示旋转的角度,x、y、z 表示点P 的坐标,x"、y"、z"表示旋转后点P"的坐标。
三、旋转变换公式的应用旋转变换公式在实际应用中具有广泛的应用,例如在计算机图形学中,利用旋转变换公式可以将一个图形从一个位置旋转到另一个位置,从而实现图形的变换;在物理学中,旋转变换公式可以用来描述物体的旋转运动,从而研究物体的运动规律;在工程领域,旋转变换公式可以用来解决各种实际问题,如机械设备的旋转、建筑物的倾斜等。
四、总结三维空间的旋转变换公式是一种基本的几何变换公式,它可以描述一个点或一个物体在一个三维空间中的旋转变换。
线性变换在二维空间和三维空间中的应用
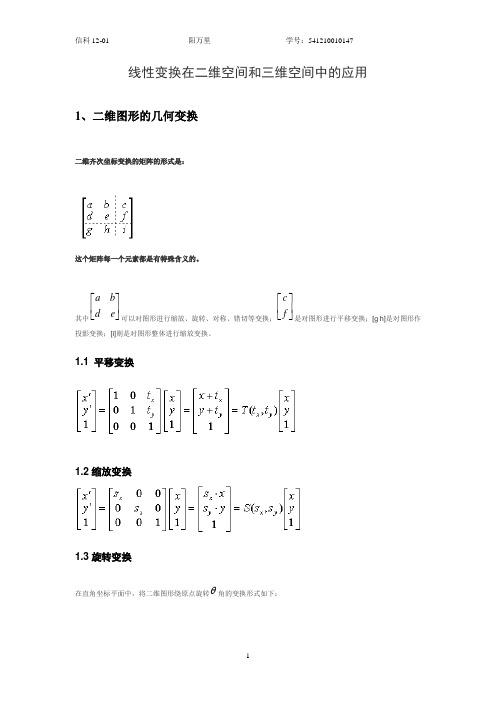
线性变换在二维空间和三维空间中的应用1、二维图形的几何变换二维齐次坐标变换的矩阵的形式是:这个矩阵每一个元素都是有特殊含义的。
其中⎥⎦⎤⎢⎣⎡edba可以对图形进行缩放、旋转、对称、错切等变换;⎥⎦⎤⎢⎣⎡fc是对图形进行平移变换;[g h]是对图形作投影变换;[i]则是对图形整体进行缩放变换。
1.1 平移变换1.2缩放变换1.3旋转变换在直角坐标平面中,将二维图形绕原点旋转θ角的变换形式如下:θ取正值,顺时针旋转θ取负值。
逆时针旋转1.4对称变换对称变换其实只是a、b、d、e取0、1等特殊值产生的一些特殊效果。
例如:当b=d=0,a=-1,e=1时有x´=-x,y´=y,产生与y轴对称的图形。
A. 当b=d=0,a=-1,e=-1时有x´=x,y´=-y,产生与x轴对称的图形。
B. 当b=d=0,a=e=-1时有x´=-x,y´=-y,产生与原点对称的图形。
C. 当b=d=1,a=e=0时有x´=y,y´=x,产生与直线y=x对称的图形。
D. 当b=d=-1,a=e=0时有x´=-y,y´=-x,产生与直线y=-x对称的图形。
1.5错切变换A. 当d=0时,x´=x+by,y´=y,此时,图形的y坐标不变,x坐标随初值(x,y)及变换系数b作线性变化。
B. 当b=0时,x´=x,y´=dx+y,此时,图形的x坐标不变,y坐标随初值(x,y)及变换系数d作线性变化。
1.6复合变换如果图形要做一次以上的几何变换,那么可以将各个变换矩阵综合起来进行一步到位的变换。
复合变换有如下的性质:A. 复合平移对同一图形做两次平移相当于将两次的平移两加起来:B. 复合缩放两次连续的缩放相当于将缩放操作相乘:C. 复合旋转两次连续的旋转相当于将两次的旋转角度相加:缩放、旋转变换都与参考点有关,上面进行的各种变换都是以原点为参考点的。
《计算机图形学》实验报告
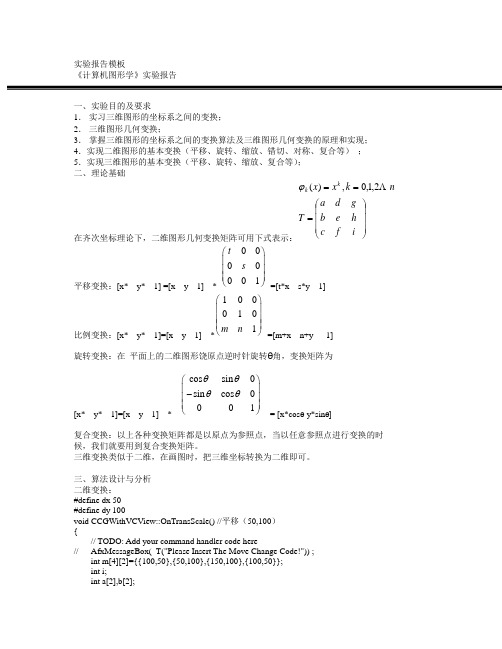
实验报告模板《计算机图形学》实验报告一、实验目的及要求1.实习三维图形的坐标系之间的变换;2.三维图形几何变换;3.掌握三维图形的坐标系之间的变换算法及三维图形几何变换的原理和实现;4.实现二维图形的基本变换(平移、旋转、缩放、错切、对称、复合等);5.实现三维图形的基本变换(平移、旋转、缩放、复合等);二、理论基础在齐次坐标理论下,二维图形几何变换矩阵可用下式表示:⎪⎪⎪⎭⎫⎝⎛===ifchebgdaTnkxx kk2,1,0,)(ϕ平移变换:[x* y* 1] =[x y 1] *0000001ts⎛⎫⎪⎪⎪⎝⎭=[t*x s*y 1]比例变换:[x* y* 1]=[x y 1] *1000101m n⎛⎫⎪⎪⎪⎝⎭=[m+x n+y 1]旋转变换:在平面上的二维图形饶原点逆时针旋转Ө角,变换矩阵为[x* y* 1]=[x y 1] *cos sin0sin cos0001θθθθ⎛⎫⎪- ⎪⎪⎝⎭= [x*cosө-y*sinө]复合变换:以上各种变换矩阵都是以原点为参照点,当以任意参照点进行变换的时候,我们就要用到复合变换矩阵。
三维变换类似于二维,在画图时,把三维坐标转换为二维即可。
三、算法设计与分析二维变换:#define dx 50#define dy 100void CCGWithVCView::OnTransScale() //平移(50,100){// TODO: Add your command handler code here// AfxMessageBox(_T("Please Insert The Move Change Code!")) ;int m[4][2]={{100,50},{50,100},{150,100},{100,50}};int i;int a[2],b[2];CDC * pDC = GetDC();for(i=0;i<3;i++){a[0]=m[i][0];a[1]=m[i][1];b[0]=m[i+1][0];b[1]=m[i+1][1];DDALine(a,b, RGB(0, 200, 255), pDC);}for(i=0;i<3;i++){a[0]=m[i][0]+dx;a[1]=m[i][1]+dy;b[0]=m[i+1][0]+dx;b[1]=m[i+1][1]+dy;DDALine(a,b, RGB(0, 200, 255), pDC);}}#define h 0.1745#include<math.h>void CCGWithVCView::OnTransRotate() //旋转{// TODO: Add your command handler code here// AfxMessageBox(_T("Please Insert The Rotate Change Code!")) ;int m[4][2]={{100,50},{50,100},{150,100},{100,50}};int i;int a[2],b[2];CDC * pDC = GetDC();for(i=0;i<3;i++){a[0]=m[i][0];a[1]=m[i][1];b[0]=m[i+1][0];b[1]=m[i+1][1];DDALine(a,b, RGB(0, 200, 255), pDC);}for(i=0;i<3;i++){a[0]=m[i][0]*cos(h)-m[i][1]*sin(h);a[1]=m[i][1]*cos(h)+m[i][0]*sin(h);b[0]=m[i+1][0]*cos(h)-m[i+1][1]*sin(h);b[1]=m[i+1][1]*cos(h)+m[i+1][0]*sin(h);DDALine(a,b, RGB(0, 200, 255), pDC);}}#define k 2;#define f 2.5void CCGWithVCView::OnTransMove() //缩放{// TODO: Add your command handler code here//AfxMessageBox(_T("Please Insert The Scale Change Code!")) ;int m[4][2]={{100,50},{50,100},{150,100},{100,50}};int i;int a[2],b[2];CDC * pDC = GetDC();for(i=0;i<3;i++){a[0]=m[i][0];a[1]=m[i][1];b[0]=m[i+1][0];b[1]=m[i+1][1];DDALine(a,b, RGB(0, 200, 255), pDC);}for(i=0;i<3;i++){a[0]=m[i][0]*k;a[1]=m[i][1]*f;b[0]=m[i+1][0]*k;b[1]=m[i+1][1]*f;DDALine(a,b, RGB(0, 200, 255), pDC);}}#define n 2#define d 0void CCGWithVCView::OnTransOther(){// TODO: Add your command handler code here//AfxMessageBox(_T("Please Insert The Other Change Code!")) ;int m[4][2]={{100,50},{50,100},{150,100},{100,50}};int i;int a[2],b[2];CDC * pDC = GetDC();for(i=0;i<3;i++){a[0]=m[i][0];a[1]=m[i][1];b[0]=m[i+1][0];b[1]=m[i+1][1];DDALine(a,b, RGB(0, 200, 255), pDC);}for(i=0;i<3;i++){a[0]=m[i][0]+n*m[i][1];a[1]=m[i][1]+d*m[i][0];b[0]=m[i+1][0]+n*m[i+1][1];b[1]=m[i+1][1]+d*m[i+1][0];DDALine(a,b, RGB(0, 200, 255), pDC);}}三维变换:#include<math.h>#define dx 100#define dy 100#define dz 0void CCGWithVCView::OnTransScale() //平移(50,100){// TODO: Add your command handler code here// AfxMessageBox(_T("Please Insert The Move Change Code!")) ;int i;int p2d[6][2];int p3d[6][3]={{400,300,0},{300,400,0},{300,300,10},{275,300,0},{400,300,0},{300,300,10}};for( i=0;i<6;i++){p2d[i][0]=p3d[i][1]-p3d[i][0]/sqrt(2);p2d[i][1]=p3d[i][2]+p3d[i][0]/sqrt(2);}int a[2],b[2];CDC * pDC = GetDC();for(i=0;i<5;i++){a[0]=p2d[i][0];a[1]=p2d[i][1];b[0]=p2d[i+1][0];b[1]=p2d[i+1][1];DDALine(a,b, RGB(0, 200, 255), pDC);}for( i=0;i<6;i++){p2d[i][0]=p3d[i][1]+dy-p3d[i][0]+dx/sqrt(2);p2d[i][1]=p3d[i][2]+dz+p3d[i][0]+dx/sqrt(2);}for(i=0;i<5;i++){a[0]=p2d[i][0];a[1]=p2d[i][1];b[0]=p2d[i+1][0];b[1]=p2d[i+1][1];DDALine(a,b, RGB(0, 0, 255), pDC);}}#define k 0.1745void CCGWithVCView::OnTransRotate() //旋转{// TODO: Add your command handler code here// AfxMessageBox(_T("Please Insert The Rotate Change Code!")) ;int i;int p2d[6][2];int p3d[6][3]={{400,300,0},{300,400,0},{300,300,10},{275,300,0},{400,300,0},{300,300,10}};for( i=0;i<6;i++){p2d[i][0]=p3d[i][1]-p3d[i][0]/sqrt(2);p2d[i][1]=p3d[i][2]+p3d[i][0]/sqrt(2);}int a[2],b[2];CDC * pDC = GetDC();for(i=0;i<5;i++){a[0]=p2d[i][0];a[1]=p2d[i][1];b[0]=p2d[i+1][0];b[1]=p2d[i+1][1];DDALine(a,b, RGB(0, 200, 255), pDC);}for( i=0;i<6;i++){p2d[i][0]=p3d[i][1]*cos(k)-p3d[i][2]*sin(k)-p3d[i][0]/sqrt(2);p2d[i][1]=p3d[i][2]*cos(k)+p3d[i][1]*sin(k)+p3d[i][0]/sqrt(2);}for(i=0;i<5;i++){a[0]=p2d[i][0];a[1]=p2d[i][1];b[0]=p2d[i+1][0];b[1]=p2d[i+1][1];DDALine(a,b, RGB(0, 0, 255), pDC);}}四、程序调试及结果的分析二维:三维:五、实验心得及建议在实验过程中,尽管过程中任由许多不会的地方,而且有待于今后的提高和改进,但我加深了对书本上知识的理解与掌握,同时也学到了很多书本上没有东西,并积累了一些宝贵的经验,这对我以后的学习与工作是不无裨益的。
三维几何中的旋转变换

三维几何中的旋转变换在三维几何中,旋转变换是一种重要的几何操作,它可以用来描述物体在三维空间中的旋转运动。
旋转变换在计算机图形学、机器人学、航空航天等领域都有广泛的应用。
本文将介绍旋转变换的基本原理、表示方法以及应用案例。
一、旋转变换的基本原理在三维几何中,旋转变换是指将一个点或物体绕某一旋转轴旋转一定角度的操作。
旋转变换可以通过旋转矩阵来描述,旋转矩阵是一个3×3的矩阵,表示了三维空间中的旋转变换。
旋转矩阵可以由旋转轴和旋转角度来确定,旋转轴可以用一个单位向量来表示。
二、旋转变换的表示方法旋转变换可以用欧拉角、四元数和旋转矩阵等方式来表示。
欧拉角是一种简单直观的表示方法,它将旋转变换分解为绕X轴、Y轴和Z轴的连续旋转。
四元数是一种更高效的表示方法,它可以用一个四维向量来表示旋转变换。
旋转矩阵是一种常用的表示方法,它直接描述了旋转变换的矩阵形式。
三、旋转变换的应用案例1. 计算机图形学中的旋转变换在计算机图形学中,旋转变换被广泛用于三维模型的变换和动画效果的实现。
通过对三维模型进行旋转变换,可以改变模型的朝向、角度和位置,从而实现各种复杂的视觉效果。
2. 机器人学中的旋转变换在机器人学中,旋转变换用于描述机器人末端执行器的运动。
通过对机器人执行器进行旋转变换,可以实现机器人的姿态调整、运动轨迹规划以及运动学逆解等功能。
3. 航空航天中的旋转变换在航空航天领域中,旋转变换广泛应用于飞行器的姿态控制和导航系统。
通过对飞行器的姿态进行旋转变换,可以实现飞行器的稳定飞行、精确导航以及目标跟踪等功能。
四、总结旋转变换是三维几何中的重要操作,它可以描述物体在三维空间中的旋转运动。
旋转变换可以用旋转矩阵、欧拉角和四元数等方式来表示,不同的表示方法适用于不同的应用场景。
通过对旋转变换的研究和应用,可以实现计算机图形学、机器人学和航空航天等领域的相关技术发展。
计算机图形学--第八讲 图形的三维几何变换

3
变换通式
空间点[x y z] 的四维齐次坐标 [X Y Z H]表示
三维空间点的变换为 [x y z 1] T = [x’ y’ z’ 1]
变换前点的坐标 三维图形的变换矩阵
变换后点的坐标
三维图形变换矩阵通式为4 x 4 方阵
a b c p
T = d
e
5.关于Y轴对称
特点: y 值不变,zx坐标符号改变
[x y z 1] T = [-x y -z 1]
6.关于Z轴对称
特点: z值不变,xy坐标符号改变
[x y z 1] T = [-x -y z 1]
5.3 图形的三维几何变换—三维基本变换(13)
对称变换示意图
17
5.3 图形的三维几何变换—三维基本变换(14)
(x’, y’, z’)
x = xcos −ysin
y = xsin +ycos
z = z
矩阵运算的表达式为
z
cos sin 0 0
x
y
z 1 = x
y
z
1
−
sin
0
cos
0
0
0
1 0
0
0 0 1
y
(x, y, z)
x
10
5.4 图形的三维几何变换-三维基本变换(7)
绕X轴旋转
与二维图形的组合变换一样, 三维立体图形也可通过 三维基本变换矩阵, 按一定顺序依次相乘而得到一个 组合矩阵(称级联), 完成组合变换。
三维组合平移、组合旋转和组合比例变换与二维组合 平移、组合旋转和组合比例变换具有类似的规律。
19
5.3 图形的三维几何变换—三维复合变换(2)
三维几何变换矩阵 -回复

三维几何变换矩阵-回复什么是三维几何变换矩阵?怎样表示一个三维几何变换矩阵?这些矩阵有哪些性质?在三维图形的空间变换中,如何使用这些矩阵来实现平移、旋转、缩放和剪切等操作?本文将一步一步回答这些问题。
首先,我们来介绍一下三维几何变换矩阵。
在三维空间中,几何变换是指对点、线、面等进行平移、旋转、缩放、剪切等操作的数学表示。
而三维几何变换矩阵是用来表示这些变换操作的一种工具。
它由一个3×3的旋转矩阵和一个3×1的平移向量组成。
接下来,我们来看一下如何表示一个三维几何变换矩阵。
一般来说,一个三维几何变换矩阵可以写成如下的形式:[T] = [R T][0 1]其中,[R]是一个3×3的旋转矩阵,[T]是一个3×1的平移向量,表示矩阵的分割线,0和1是分别表示的3×1的零向量和1这两个数。
这种表示方法被称为仿射变换矩阵。
这样的表示方法非常直观,便于对变换进行组合和计算。
接下来,我们来看一下三维几何变换矩阵的性质。
首先,几何变换矩阵是可逆的,即可以通过逆矩阵将一个变换恢复到原来的状态。
其次,变换矩阵的乘法满足结合律,即[T1][T2][T3]=[T1T2][T3]。
此外,变换矩阵的乘法顺序也影响着变换的结果。
例如,平移变换的矩阵和旋转变换的矩阵乘积的结果与旋转变换的矩阵和平移变换的矩阵乘积的结果是不同的。
在三维图形的空间变换中,我们经常需要用到平移、旋转、缩放和剪切等操作。
下面,我们来分别介绍这些操作在三维几何变换矩阵中的表示方法。
首先是平移操作。
平移是指将一个点或物体沿着指定的方向按照指定的距离移动。
在三维几何变换矩阵中,平移操作可以通过平移向量来表示。
假设平移向量为(Tx, Ty, Tz),则平移变换矩阵可以表示为:[T] = [1 0 0 Tx][0 1 0 Ty][0 0 1 Tz][0 0 0 1]其中,Tx、Ty和Tz分别表示在x、y和z轴上的平移距离。
三维坐标变换

z
2E F 2A B x
2024/9/5
z
3
H
1
G
Dy
C
1
x
图7-6 比例变换
1 y
13
(2)整体比例变换
1 0 0 0
TS
0 0
1 0
0 1
0 0
0
0
0
s
2024/9/5
14
3. 旋转变换
z
y
X
图7-7 旋转变换的角度方向
2024/9/5
15
(1)绕z轴旋转
cos sin 0 0
TRZ
sin
53
将α值代入(7-1)式得到正二测图的投影变换矩阵:
2
T
2 0
2 sin
2
cos
0 0
0 0
2
2 0
2 sin
2 0
0 0
0 1
特点分析:
2024/9/5
54
7.3.2 斜投影
斜投影图,即斜轴测图,是将三维形体向一个单 一的投影面作平行投影,但投影方向不垂直于投 影面所得到的平面图形。 常用的斜轴测图有斜等测图和斜二测图。
Y
侧视图
Y
46
3. 俯视图 三维形体向xoy面(又称H面)作垂直投影得到俯视图, (1) 投影变换 (2)使H面绕x轴负转90° (3)使H面沿z方向平移一段距离-z0
Z
z
2024/9/5
主视图
O
y
X
俯视图
7-13 三维形体及其三视图
Y
侧视图
Y
47
x
4. 侧视图 获得侧视图是将三维形体往yoz面(侧面W)作垂直投影。 (1) 侧视图的投影变换 (2)使W面绕z轴正转90° (3)使W面沿负x方向平移一段距离x0
三维图形变换
z
x
y
y z x
27
6.3.1 坐 标 系
世界坐标系 WC(World Coordinate System):包括常用的直 角坐标系、几何坐标系等各种坐标系,用来直接描述对象。 或称为用户坐标系UC (User Coordinate System),取值范围 为整个实数域。
设备坐标系 DC(Device Coordinate System):图形的显示是 在设备上进行的,在设备上描述图形的坐标系称为设备坐标 系 DC(Device Coordinate System),取值范围受设备的输入 输出的精度以及画面有效范围的限制。 屏幕上显示的图形 均以其一个像素点单位为量化单位。
注意:变换的过程有多种选择。如果中间的几个旋转次序 变了,则各个矩阵的对应矩阵参数也会不同。
18
4. 变形变换(错切变换)
z 对于过原点的一条直线,如果希望把
它变换成另一条不同的过原点的直线,
可以通过变形变换来实现。它可以产
生变形的效果。例如:一个正方体可 x 通过三维变形变换变成一个平行六面
z轴方向平移Tz距离, 变成点(x´,y´,z´),这一变换过程的变
换矩阵为:
1 0 0 Tx
T3
(Tx
,
Ty
,
Tz
)
0 0
0
1 0 0
0 1 0
Ty
Tz 1
Tx Tz Ty
x ' y ' z ' 1 T T 3 ( T x , T y , T z ) • xyz1 T
4
2. 缩放变换
z
x
y
z
x
26
6.3.1 坐 标 系
三维空间几何坐标变换矩阵ppt课件

7.3 三维坐标变换 几何变换:在一个参考坐标系下将物体从一个 位置移动到另一个位置的变换。 坐标变换: 一个物体在不同坐标系之间的坐标 变换。如从世界坐标系到观察坐标系的变换; 观察坐标到设备坐标之间的变换。再如,对物 体造型时,我们通常在局部坐标系中构造物体, 然后重新定位到用户坐标系。
22
19
利用这一结果,则绕任意轴旋转的变换矩阵可表示为:
y
P2 •
P1 • x
z
yA
• P’2
P• ’1
x
z
其中旋转轴A=[ax,ay,az]为
传统的方法通过绕坐标轴旋转变换的乘积表示绕任意轴旋 转的变换。与之相比,这种方法更直观。
20
7.2.4 三维变换矩阵的功能分块
(1)三维线性变换部分 (2)三维平移变换部分 (3)透视变换部分 (4)整体比例因子
y y
y
z
x
z
xz
(a)
xz (b)
(d) x
(c)
12
2. 绕任意轴旋转的变换
(1)平移物体使旋转轴通过坐标原点;
y
y
P2 •
• P’2
P1 •
P• ’1
x
xz
z
(1)
(2)旋转物体使旋转轴与某个坐标轴(如z轴)重合;
(3)关于该坐标轴进行指定角度的旋转;
y
y
P• ’1
x
P2’’•
z
(2)
P• ’1 P2’’•
中的元素添入相应的位置中,即
9
(1) 绕z轴正向旋转 角,旋转后点的z坐标值不变, x、y 坐标的变化相当于在xoy平面内作正 角旋转。
(2)绕x轴正向旋转 角,旋转后点的x坐标值不变, Y、z坐标的变化相当于在yoz平面内作正 角旋转。
三维图形几何变换

3.1.2 三维图形几何变换三维几何变换包括平移、旋转和变比。
三维几何变换可以表示为公式,或三维齐次坐标和4×4变换矩阵的乘积。
下面分别以公式,矩阵乘积和简记符号来描述三维几何变换。
并记变换前物体的坐标为x,y,z;变换后物体的坐标为x′,y′,z′。
一、平移设Tx,Ty,Tz是物体在三个坐标方向上的移动量,则有公式:x′=x+T xy′=y+T yz′=z+T z矩阵运算表达为:[x′ y′ z′ 1]=[x y z 1]简记为:T(Tx,Ty,Tz)二、旋转旋转分为三种基本旋转:绕z轴旋转,绕x轴旋转,绕y轴旋转。
在下述旋转变换公式中,设旋转的参考点在所绕的轴上,绕轴转θ角,方向是从轴所指处往原点看的逆时针方向(图3.5(a),(b))。
1 绕z轴旋转的公式为:x′=xcosθ-ysinθy′=xsinθ+ycosθz′=z矩阵运算的表达为:[x′ y′ z 1]=[x y z 1]简记为R z(θ)。
2 绕x轴旋转的公式为:x′=xy′=ycosθ-zsinθz′=ysinθ+zcosθ矩阵运算的表达为:[x′ y′ z′ 1]=[x y z 1]简记为R x(θ)2 绕y轴旋转的公式为:x′=zsinθ+xcosθy′=yz′=zcosθ-xsinθ矩阵的运算表达式为:[x′ y′ z′ 1]=[x y z 1]简记为Ry(θ)。
如果旋转所绕的轴不是坐标轴,而是一根任意轴,则变换过程变显得较复杂。
首先,对物体作平移和绕轴旋转变换,使得所绕之轴与某一根标准坐标轴重合。
然后,绕该标准坐标轴作所需角度的旋转。
最后,通过逆变换使所绕之轴恢复到原来位置。
这个过程须由7个基本变换的级联才能完成。
设旋转所绕的任意轴为p1, p2两点所定义的矢量。
旋转角度为 (图3.6)。
这7个基本变换是:1 T(-x1,-y1,-z1)使p1点与原点重合(图3.6(b));2 R x(α),使得轴p1p2落入平面xoz内(图3.6(c));3 R y(β),使p1p2与z轴重合(图3.6(d));4 R z(θ),执行绕p1p2轴的θ角度旋转(图3.6(e));5 R y(-β),作3的逆变换;6 R x(-α),作2的逆变换;7 T(x1,y1,z1)作1的逆变换。
三维图形的几何变换讲课文档
先平移后旋转
先旋转后平移
第二十三页,共64页。
三、三维图形的几何变换
三维图形的变换是二维图形变换的简单扩展,变换的 原理还是把齐次坐标点(x,y,z,1)通过变换矩阵变换成新 的齐次坐标点(x’,y’,z’,1),即
x ' y ' z '1 x y z 1 T
其中T为三维基本(齐次)变换矩阵:
1 0 0
T1
0
1
0
c / a 0 1
第十四页,共64页。
(2)将直线与平面图形一起按逆时针反向旋转
θ=arctan(-b/a),使直线与轴重合。即作旋转变换。
cos sin 0
T2
sin
cos
0
0
0 1
第十五页,共64页。
(3)将旋转之后的图形对y轴作对称变换,相当于对y轴 进行对称变换。其变换矩阵为:
透视投影的图形与眼睛观察景物的原理及效果是一致的, 因而常用于图形的真实效果显示。由于平行投影后直线 间的平行关系不变,因而它常用于三维图形交互和生成 工程图的视图。
第三十四页,共64页。
投影变换分类:
正交投影 正平行
正等测投影
投影
平行 投影
正轴测 投影
正二测 正三测
斜平行 斜等测
投
投影
影
斜二测
一点透视
1001 0001
1000 窗口
0000
0101 0100
1010 0010 0110
第四十四页,共64页。
对线段的两端点分别进行编码。然后根据线段两端点编 码就能方便地判断出线段相对于窗口的位置关系:
第四十五页,共64页。
计算机辅助设计图形三维变换矩阵(变换矩阵的算法)
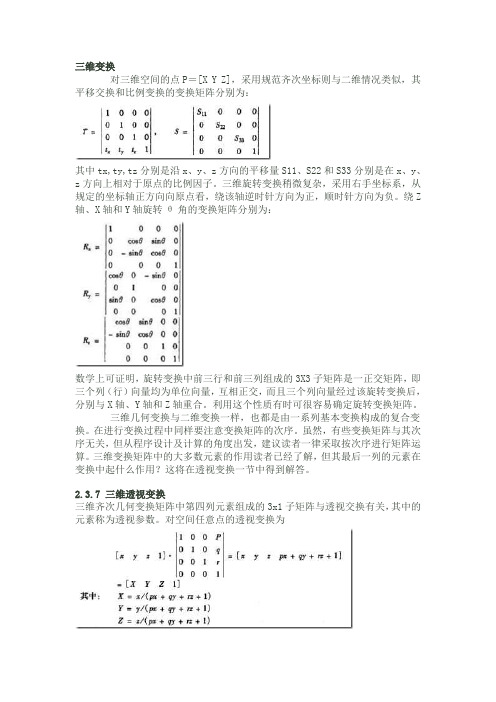
三维变换对三维空间的点P=[X Y Z],采用规范齐次坐标则与二维情况类似,其平移交换和比例变换的变换矩阵分别为:其中tx,ty,tz分别是沿x、y、z方向的平移量S11、S22和S33分别是在x、y、z方向上相对于原点的比例因子。
三维旋转变换稍微复杂,采用右手坐标系,从规定的坐标轴正方向向原点看,绕该轴逆时针方向为正,顺时针方向为负。
绕Z 轴、X轴和Y轴旋转θ角的变换矩阵分别为:数学上可证明,旋转变换中前三行和前三列组成的3X3子矩阵是一正交矩阵,即三个列(行)向量均为单位向量,互相正交,而且三个列向量经过该旋转变换后,分别与X轴、Y轴和Z轴重合。
利用这个性质有时可很容易确定旋转变换矩阵。
三维几何变换与二维变换一样,也都是由一系列基本变换构成的复合变换。
在进行变换过程中同样要注意变换矩阵的次序。
虽然,有些变换矩阵与其次序无关,但从程序设计及计算的角度出发,建议读者一律采取按次序进行矩阵运算。
三维变换矩阵中的大多数元素的作用读者已经了解,但其最后一列的元素在变换中起什么作用?这将在透视变换一节中得到解答。
2.3.7 三维透视变换三维齐次几何变换矩阵中第四列元素组成的3x1子矩阵与透视交换有关,其中的元素称为透视参数。
对空间任意点的透视变换为上式中分母px+qy+rz+l是一个变量,故经透视变换后图形产生了变形。
参数p、q、r如何对图形产生透视变换的呢?为简化问题,先设p=0、q=0,则这时的变换矩阵对空间点所进行的变换为由上式,当 Z=0时,X=x,Y=y,说明z=0这个平面是此变换中的不变动平面,即变换后,x、y值均无变化;当z→ ac时,则Z→l/r,表示无限远点经透视变换后对应于有限点,也就是平行Z轴的直线变换后汇交于Z轴上的一点1/r;当Z→l/r时,Z→∞说明有限远点-l/r经透视变换后又对应无限远点,原来交于轴上的一点-l/r的直线变换后平行于Z轴。
当r>0时,这种变换的几何意义如图 2.31所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维图形几何变换
2007-06-22 22:50:04| 分类:兴趣|举报|字号订阅
3.1.2三维图形几何变换
三维几何变换包括平移、旋转和变比。
三维几何变换可以表示为公式,或三维齐次坐标和4×4变换矩阵的乘积。
下面分别以公式,矩阵乘积和简记符号来描述三维几何变换。
并记变换前物体的坐标为x,y,z;变换后物体的坐标为x′,y′,z′。
一、平移
设Tx,Ty,Tz是物体在三个坐标方向上的移动量,则有公式:
x′=x+T x
y′=y+T y
z′=z+T z
矩阵运算表达为:
[x′y′z′1]=[x y z1]
简记为:T(Tx,Ty,Tz)
二、旋转
旋转分为三种基本旋转:绕z轴旋转,绕x轴旋转,绕y轴旋转。
在下述旋转变换公式中,设旋转的参考点在所绕的轴上,绕轴转θ角,方向是从轴所指处往原点看的逆时针方向(图3.5(a),(b))。
1绕z轴旋转的公式为:
x′=xcosθ-ysinθ
y′=xsinθ+ycosθ
z′=z
矩阵运算的表达为:
[x′y′z1]=[x y z1]
简记为R z(θ)。
2绕x轴旋转的公式为:
x′=x
y′=ycosθ-zsinθ
z′=ysinθ+zcosθ
矩阵运算的表达为:
[x′y′z′1]=[x y z1]简记为R x(θ)
2绕y轴旋转的公式为:
x′=zsinθ+xcosθ
y′=y
z′=zcosθ-xsinθ
矩阵的运算表达式为:
[x′y′z′1]=[x y z1]简记为Ry(θ)。
如果旋转所绕的轴不是坐标轴,而是一根任意轴,则变换过程变显得较复杂。
首先,对物体作平移和绕轴旋转变换,使得所绕之轴与某一根标准坐标轴重合。
然后,绕该标准坐标轴作所需角度的旋转。
最后,通过逆变换使所绕之轴恢复到原来位置。
这个过程须由7个基本变换的级联才能完成。
设旋转所绕的任意轴为p1, p2两点所定义的矢量。
旋转角度为q(图3.6)。
这7个基本变换是:
1T(-x1,-y1,-z1)使p1点与原点重合(图3.6(b));
2R x(α),使得轴p1p2落入平面xoz内(图3.6(c));
3R y(β),使p1p2与z轴重合(图3.6(d));
4R z(θ),执行绕p1p2轴的θ角度旋转(图3.6(e));
5R y(-β),作3的逆变换;
6R x(-α),作2的逆变换;
7T(x1,y1,z1)作1的逆变换。
图3.6 绕任意轴P1P2旋转的前四个步骤
1求R x(α)的参数:转角α是u在yoz平面的投影u′=(o,b,c)与z轴的夹角(图37(a)),故有:
cosa=,其中d=
又因u′×u z=u x|u′||u z|sinα
其中u x是在x轴上的投影。
并且用行列式计算矢量积得:
u′×u z=u x·b,故得:
sinα=,得出R x(α)为:
R x(α)=
图3.7
2求R y(β)的参数(图3.7(b)):经过R x(α)变换,p2已落入xoz平面,但p2点与x轴的距离保持不变。
因此,p1p2现在的单位矢量u″的z方向分量之值即为u′之长度,等于d,β是u″与u z之夹角,故有:
cosβ==d
根据矢量积的定义,有:
u z|u″||u z|sinβ=u y〃(-a)
因为|u″|===1,并|u z|=1,所以:sinβ=-a
因此得到R y(β)为:
Ry(β)=
绕任意轴(x1y1z1)(x2y2z2)转动θ角的变换R(θ)为如下级联变换:
R(θ)=T(-x1,-y1,-z1)〃R x(a)〃R y(β)〃R z(θ)〃
R y(-β)〃R x(-a)〃T(x1,y1,z1)
三、变比
设sx,sy,sz是物体在三个方向的比例变化量,则有公式:x′=x〃sx,
y′=y〃sy,
z′=z〃sz,
矩阵运算的表达为
[x′y′z′1]=[x y z]
简记为S(sx,sy,sz)。
相对于某个非原点参数点(xf,yf,zf)进行固定点变比变换,是通过如下级联变换实现的:
T(-xf,-yf,-zf)〃S(sx,sy,sz)〃T(xf,yf,zf)。