钢板翻转机构机械设计
创新设计钢板翻转机构

创新设计钢板翻转机构机构创新设计说明书设计题目钢板翻转机翻转机构设计学校南京农业大学工学院工学院(系) 材料成型及控制专业班级材控(02)班学号 33310228 报告人郝宇指导老师肖茂华完成日期 2012 年 10 月 26 日一、课题要求1.1机具功能:实现将钢板反转180度。
实现方式:通过左夹板反转110度送至右夹板,右夹板翻转80度实现。
已知条件:原动件由旋转式电动机驱动;每分钟翻钢板十次;许用传动角为50度。
二、课题分析2.1、课题分析:工作部分由左右夹板两部分组成。
左夹板需要实现由水平到铅垂位置左侧十度位置的往复为步骤一;右夹板需实现当左夹板转至从铅垂偏左十度时,由右侧水平转至贴至左侧夹板为步骤二,同左夹板共同运动二十度为步骤三,回到右侧水平为步骤四。
2.2机构设计:两夹板的转动可用齿轮机构转动来保证步骤二两夹板能贴一起运动的速度要求,但是匀速转动工作效率底,难保证每分钟翻转钢板十次,不予采用;左夹板运动用曲柄摇杆机构实现,右夹板用凸轮机构实现,虽然能够实现课题要求,但凸轮的设计非常规,求解复杂,不予采用;左右夹板运动由两组曲柄摇杆机构实现(通过一定方式简化课题要求,使左夹板在右夹板至铅垂右十度与之贴合,而转变成八十度的来回摆动)。
二、工作机构设计2.1机构设计简述2.1.1运动过程简化:左右夹板加电磁铁,并且使右夹板磁性更大;左侧加电磁铁,接电铜片设计为比一百一十度略小。
已实现钢板能被左夹板稳妥的送至右侧并且与右夹板顺利实现衔接。
2.1.2左右夹板运动过程实现:左右夹板用两组各自独立运动的曲柄摇杆机构实现。
若采用两个电机浪费动力,一组出现故障容易发生危险,设计用一个电机带动两组机构一起运动。
设计左右夹板曲柄轴线在一起,以简化电机与两机构的衔接。
2.2方案详述2.2.1方案一运动简图:设计计算选定AD=1500,当右夹板与左夹板贴合时 CD=500,α,,,:,β,,,,:222222L,L,ACAD,CD,AC43COS,,,, 在三角形ACD中, ADCDL4L32**2**222即AC,L,L,2*L*L*COS,,AC,L2,L1 4343222222AD,CD,ACL,L,AC11431COS,,,,在三角形ACD中, 1ADCDL4L32**2**1 222即AC,L,L,2*L*L*COS,,AC,L,L 143432122222,,L,L,L,L,2*L*L*COS,,1500,500,2,1500,500,COS20: 214343 由(1)(2)得:L2=1423.52, L1=379.27222AG,FG,AF在三角形AFG中,cos, 2*AG*FG222,,AGFGAF,,COS在三角形AFG中, L22=1800, L12=311.08 2*AG*FG计算结果:左半机构:L=379.27, L=1423.52, L=500, L=1500 1234右半机构:L=311.08, L=1800, L3=500, L=1929.01 12224杆长关系检验:左半机构:L+L=L+L=1879.27<L+L=1923.52 minmax1423右半机构:L+L=L+L2240.09<L+L=2300 minmax124=23整体分析:连杆到位情况:A(311.08,311.08),E(1.69,278.7),E(396.22,11.88), 12E(622.1,317.18),F(1791.91,466.04), 31F(2175.02,287.97),F(2421.75,353.09),G(2175.02,784.22) 23解析法检验,从动二杆组FEA的模式值表达式可以列出。
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》范文
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言在工业生产过程中,大工件的翻转是一项常见的操作。
为了确保翻转过程的稳定性和安全性,需要深入研究翻转过程中的力学原理,并设计出高效、可靠的翻转设备。
本文将针对大工件翻转设备的翻转过程进行力学分析,并在此基础上提出180度翻转机的方案设计。
二、大工件翻转过程力学分析大工件翻转过程中的力学分析主要涉及重力、摩擦力、惯性力等力的作用。
在翻转过程中,这些力相互作用,影响着工件的稳定性和安全性。
1. 重力分析重力是大工件翻转过程中最主要的外力。
在翻转过程中,重力使工件产生向下的加速度,需要设备提供足够的力来克服这一加速度,以保证工件的稳定翻转。
2. 摩擦力分析摩擦力是影响大工件翻转的重要因素。
在翻转过程中,工件与设备之间的摩擦力以及工件与支撑面之间的摩擦力都会影响翻转的顺利进行。
因此,需要合理设计设备与工件之间的摩擦系数,以保证翻转过程的稳定性和安全性。
3. 惯性力分析惯性力是工件在翻转过程中保持原有运动状态的力量。
在翻转过程中,需要克服工件的惯性力,以实现工件的顺利翻转。
因此,需要合理设计设备的动力系统和控制系统,以克服工件的惯性力。
三、180度翻转机方案设计基于大工件翻转过程的力学分析,本文提出以下180度翻转机方案设计:1. 设备结构设计翻转机主要由底座、支撑装置、动力系统、控制系统等部分组成。
底座用于支撑整个设备,保证设备的稳定性;支撑装置用于支撑工件,保证工件的稳定翻转;动力系统提供翻转过程中所需的力;控制系统负责控制设备的运行和停止。
2. 动力系统设计动力系统是翻转机的核心部分,需要提供足够的力来克服重力、摩擦力和惯性力等力的作用。
因此,动力系统应采用高效、可靠的电机和传动装置,以保证设备的正常运行和翻转过程的稳定性。
3. 控制系统设计控制系统负责控制设备的运行和停止,以及实现精确的180度翻转。
控制系统应采用先进的控制算法和传感器技术,以实现精确的控制和监测。
324 钢坯火焰清理机中的翻版机构设计(SW三维建模)

翻板装置中各数据计算一、双臂曲柄摇杆式翻板机设计1.1 概述翻板机是中厚板车间精整工段不可缺少的辅助设备之一。
其作用是将钢板翻转 180°,用来检查钢板上、下表面的质量。
本次钢坯火焰清理机设计中,对钢板上、下 两表面进行清理,采用的翻板机构为双臂曲柄摇杆式翻板机构。
双臂曲柄摇杆式翻板机 由电机、减速机、曲柄连杆机构组成。
电机、减速机提供低速大扭矩的动力,由两个曲 柄连杆机构分别带动翻板臂和接板臂的旋转,从而实现翻板的动作。
1.2 工作原理和结构特点图1.1为双臂曲柄摇杆式翻板机的机构示意简图。
电机经减速机减速后,由减速机 的低速轴分别带动两套曲柄四连杆机构,两个曲柄 a1、a2 有一定的角度位置差,两摇 杆轴上有若干个翻板臂和接板臂。
低速轴带动曲柄做逆时针转动,曲柄a1带动连杆b1, 连杆 b1 带动摇杆 c1 做逆时针转动;同时曲柄a2 带动连杆 b2,连杆 b2 带动摇杆 c2 做 顺时针转动。
为了满足空载启动,在初始位置翻板臂(送料拨杆)先向下偏转 5°,接 板臂也位于水平面以下偏5°,翻板臂逆时针旋转托起钢板直到与水平位置成85°,与 此同时,接板臂(接料拨杆)由水平位置顺时针旋转处于与翻板臂平行和接近平行的位 置。
然后两臂加持钢板一起转动,开始钢板的交接(如图2)。
当它们共同转过10°后, 翻板臂开始返回到水平位置。
此时接板臂也托起钢板返回,当处于水平位置时,钢板落 到辊道上,完成180°翻面。
而此时接料臂仍继续向下偏转5°,最后再回到水平位置。
从而完成一次翻板,完成一次翻板的时间是21s。
图1.1 转动角度初始位置图图1.2 接送位置角度图结构特点:1、两翻臂的摆动角度 100°,从水平线下 5°摆到过垂直位置 5°,当减速器输出轴的曲柄回转 360°,通过两连杆带动两摇杆在 105°来回摆动一次,两翻臂则在 100° 来回摆动一次, 两曲柄相位差22°8′14″, 故主动翻臂以-5°摆动托起钢板到85° 时,从动翻臂摆动100°过垂直线5°。
新型板料翻转机构

工作 台上 剩 余板 料 为合 格 制 件 ,此 机 构替 代 了 以前 用桥 式起 重 机 起 吊 翻板 工 序 ,大 幅 提 高 了生 产 效 率
和板 材利 用率 。
图 1
1 .板料翻转机构组成与工作过程
( ) 翻转 机 构 的结 构 组 成 如 图 1 示 ,动力 油 1 所 缸 I和 Ⅱ尾部 铰 接 于 油缸 底 座 上 ,前 端 通 过 连 接 销 分 别与 转臂 I和转 臂 Ⅱ铰接 ,主要 作用 是 传递 动 力 ; 转 臂 I和转 臂 Ⅱ用键 分 别 与 连 杆 I和 连 杆 Ⅱ联 接 ,
料在 变形 时 产 生 的 应 力 可 能 将 大 直 径 薄 壁 管 胀 坏 。
锡。⑨ 酸 洗、外 表 面 抛 光,重 新 安 装 好 隔 热 固
定套。
( ) 注意事项 3
①加 热熔 化 锡时 尽量 保 证干 燥 ,
此时用 一根适 当直 径且外 表 面涂有 2~ mm黏 土层 的 5
l.油缸 底 座 6
( ) 工作过 程 如 图 2所示 ,板料 剪 切 至 最 后 一 2 刀时 ,前送料 夹 钳将 板 料拉 回 ,落 在 连 板 2上 ,此
连杆 I 连杆 Ⅱ上 间 隔 布置 着 六 组・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ 夺 夺 ・ 夺 幸 夺 夺 夺 夺 夺 夺 牛 寺 夺 夺 夺 牛 牛 孛 争 夺 ÷ 幸 夺 夺 寺 夺 夺 夺 争 幸 夺 夺 寺 辛 夺 夺 争 々 夺 夺 寺 夺 争
颗粒 状 ,装 入 内 外 不 锈 钢 方 管 的 夹 层 ,尽 量 装 实 。
不锈 钢方 管 。
同济大学机械原理课程设计计算说明书_翻钢机钢板翻转机构

机械原理课程设计计算说明书设计题目翻钢机钢板翻转机构学校同济大学机械工程学院(系)机械设计制造及其自动化专业班级学号设计人指导老师虞红根完成日期年月日目录一、翻钢机工作原理及工艺动作分解 (2)二、传动装置设计 (2)三、工作机构的运动协调设计和机械运动循环图 (6)四、工作机构的设计计算 (7)五、摇杆速度分析 (9)六、翻钢机前后承接机构的设计 (10)七、参考文献 (13)八、设计心得体会 (14)4. 传动机构设计方案一:蜗轮蜗杆传动 轮系简图如下图所示:其中各齿轮的齿数分别为z 1=1,z 2=80,z 3=25,z 4=80。
1)传动比计算总传动比i =i 12·i 34蜗轮蜗杆 i 12=z 2z 1=801=80定轴轮系3-4 i 34=z 4z 3=8025=3.2故 i =i 12·i 34=80×3.2=1602)材料选择及加工构件 材料 加工 蜗轮 40Cr淬火 蜗杆 铸造锡青铜(ZCuSn10Pl )时效处理 齿轮3 40Cr 调质 齿轮440Cr调质3)传动效率计算蜗轮蜗杆传动效率取η1=0.7,齿轮3、4之间的传动效率η2=0.96,总传动效率为 η=η1·η2=0.7×0.96=0.672图1方案二:周转轮系传动轮系简图如下图所示:其中各齿轮的齿数分别为z1=53,z2=40,z2’=39,z3=52。
1)传动比计算周转轮系1-2-2’-3-H i31H=n3−n Hn1−n H =z2’·z1z3 ·z2=53×3952×40=159160又n1=0得i31H=1-n3n H=1-i3H所以i3H=1-159160=1 160故i H3=1602)材料选择及加工所有齿轮均选用40Cr,并经调制处理。
3)传动效率计算行星架H与齿轮2、2’的轴所构成的转动副的传动效率为η1=0.98,齿轮1和2之间的传动效率为η2=0.96,齿轮2’和3之间的传动效率为η3=0.96,则总的传动效率为η=η1∙η2∙η3=0.98×0.96×0.96=0.903图2三、工作机构的运动协调设计和机械运动循环图如图3、图4所示,分别是两套曲柄摇杆机构的极限位置,在P点上,两曲柄成170°固结,对于两个摇杆,二者正好同时达到极限位置。
(完整版)钢板翻转机构机械设计

2 计算当量的单排链计算功率 Pca
4计算链节数和中心距
根据链传动的工作情况、主动链轮齿数和链条排数,将链传动所传递的功率修正
为
当
量
的
单
排
链
计
算
功
率 初选中心距a0=46p=1460.5mm
计算链节数
Pca
KAz • Kz Kp
P — — — — — — — — — — — — — —(6 -1)
查表得工况系数K A 1.0
由于翻转机节省能源,安全可靠,后期维护费用低,可 以用在钢厂中厚板车间使用,尤其在翻转厚钢板方面有更加 突出优势,能够有效提高产品质量,增强产品竞争力。系统 运行稳定、可靠,故障点容易查找,维护量小,大大减少人 工劳动强度,延长设备使用寿命,减少维护量,提高综合效 益。
谢谢!
答辩人:
DE=CE-CD 即
BE=L1+L2,
DE=L2-L1, 解得:
L1=125.86mm
L2=400 mm
L3= 195.81mm
参数设计与计算 3.曲柄存在条件验证
L1=178.77 mm, L2= 600mm, L3=233.38mm CD=618.47mm L1=125.86mm,L2=400 mm L3= 195.81mm,AE=427mm
三维建模及各零件设计
1整体构型
三维建模及各零件设计
三维建模及各零件设计
2零件建模
左右翻板
三维建模及各零件设计
翻板轴支架 翻板轴
左侧输入轴 翻板轴轴套
三维建模及各零件设计
右侧输入轴 齿轮轴
连杆连接轴 构架方管
三维建模及各零件设计
3装配体装配
输入轴支座
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言在工业生产中,大工件的翻转是一个常见且重要的操作环节。
为确保工件在翻转过程中的稳定性和安全性,对翻转设备的力学分析显得尤为重要。
本文旨在分析大工件翻转过程中的力学原理,并设计一款高效的180度翻转机方案。
二、大工件翻转过程力学分析1. 力学原理概述大工件翻转过程的力学分析主要涉及力学原理中的重心平衡、扭矩平衡和转动惯量等方面。
在翻转过程中,必须确保工件的重心稳定,避免因重心偏移而导致的设备倾覆或工件损坏。
同时,需考虑扭矩平衡,确保翻转过程中的动力传递和阻力平衡。
此外,还需考虑转动惯量对翻转速度和稳定性的影响。
2. 力学模型建立根据大工件的形状、尺寸和质量等参数,建立力学模型。
通过分析工件在翻转过程中的受力情况,如重力、支持力、摩擦力等,计算扭矩和转动惯量等关键参数。
在此基础上,进行工件翻转过程的力学模拟和仿真分析。
3. 稳定性分析为确保大工件在翻转过程中的稳定性,需进行稳定性分析。
通过分析工件的重心位置、支撑点的位置和数量等因素,确定工件在翻转过程中的稳定状态。
同时,考虑外部干扰因素如振动、冲击等对稳定性的影响,为设备设计提供依据。
三、180度翻转机方案设计1. 设计要求根据大工件的特点和翻转需求,制定180度翻转机的设计方案。
设计要求包括翻转速度、精度、稳定性、安全性等方面。
同时,需考虑设备的结构简单、操作方便、维护成本低等因素。
2. 设备结构设备结构主要包括支撑装置、驱动装置、翻转机构等部分。
支撑装置用于支撑工件,确保其在翻转过程中的稳定性;驱动装置提供动力,驱动翻转机构进行翻转操作;翻转机构是实现工件180度翻转的核心部件。
3. 工作原理设备的工作原理主要基于力学原理和机械传动原理。
通过驱动装置驱动翻转机构,使工件绕支撑装置进行180度翻转。
为确保工件的稳定性和安全性,需根据力学分析结果进行精确的机械设计和传动系统设计。
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言随着工业自动化水平的不断提高,大工件翻转设备在众多领域得到了广泛应用。
本文旨在深入分析大工件翻转过程中的力学原理,并基于这些原理设计一款高效、稳定的180度翻转机。
本文首先对大工件翻转的基本概念进行阐述,然后分析翻转过程中的力学原理,最后提出翻转机方案的设计思路和实施步骤。
二、大工件翻转过程力学分析大工件翻转过程中涉及到的力学原理主要包括重力、摩擦力、惯性力等。
在翻转过程中,这些力将对工件的稳定性和翻转效率产生重要影响。
首先,重力是影响工件翻转的主要因素之一。
在翻转过程中,重力使工件产生向下的趋势,需要通过设备的支撑和旋转来平衡这种力。
其次,摩擦力也是影响工件翻转的重要因素。
工件与设备之间的摩擦力必须足够大,以保证工件在翻转过程中不会滑落或移位。
最后,惯性力也是需要考虑的因素,特别是在工件质量较大或翻转速度较快的情况下,惯性力将对设备的稳定性和工件的定位精度产生影响。
三、180度翻转机方案设计基于大工件翻转过程的力学分析,我们设计了一款高效、稳定的180度翻转机。
以下是该方案的设计思路和实施步骤:1. 设计原则(1)稳定性:确保设备在运行过程中保持稳定,避免工件滑落或移位。
(2)高效性:优化设备结构,提高工件的翻转效率。
(3)可调性:根据不同工件的尺寸和重量,调整设备的参数以适应各种工件的翻转需求。
2. 设备结构(1)底座:采用坚固的材料制成,以提供稳定的支撑。
底座上设有调节装置,可根据工件的尺寸和重量进行调整。
(2)旋转机构:包括电机、减速器和旋转轴等部件。
电机驱动旋转轴使工件进行旋转,减速器用于控制旋转速度和扭矩。
(3)定位装置:用于固定工件的位置,防止在翻转过程中发生移位。
定位装置可根据工件的形状和尺寸进行调整。
(4)安全防护装置:包括防护罩、紧急停止按钮等,确保操作人员的安全。
3. 工作流程(1)将工件放置在底座上,调整定位装置以固定工件位置。
立式钢质卷板翻转装置的设计与应用
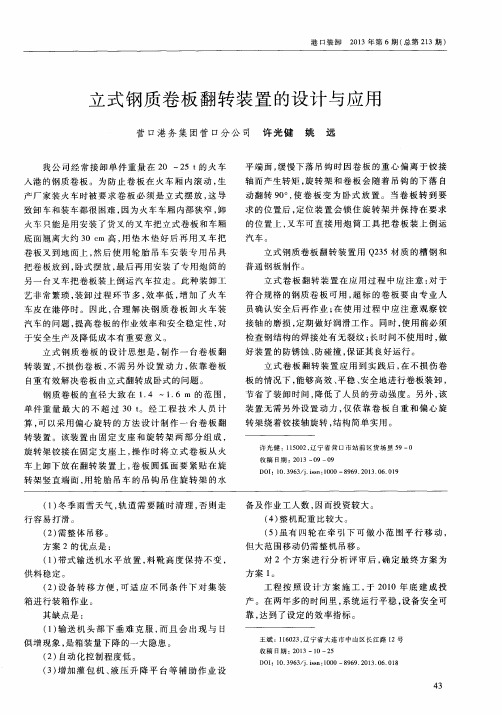
立式 钢 质卷板 翻转 装 置用 Q 2 3 5材 质 的 槽 钢 和 普通 钢板 制作 。
立 式 卷板 翻转 装 置 在应 用 过 程 中应 注 意 : 对 于
符合 规格 的钢质 卷 板 可用 , 超 标 的卷 板 要 由专 业人 员 确认安 全 后再 作 业 ; 在 使 用 过 程 中应 注 意 观 察 铰 接轴 的磨 损 , 定期 做好 润滑 工作 。同时 , 使用前 必 须 检查 钢结 构 的焊 接处 有无 裂纹 ; 长 时间不 使用 时 , 做 好装 置 的 防锈 蚀 、 防碰 撞 , 保 证 其 良好 运行 。 立 式 卷板 翻转 装 置 应用 到 实 践后 , 在不 损 伤 卷 板 的情况 下 , 能够 高效 、 平稳 、 安 全地 进行 卷板 装卸 , 节 省 了装 卸 时 间 , 降低 了人 员 的劳 动强 度 。另 外 , 该 装 置无需 另 外设 置 动 力 , 仅 依靠 卷板 自重 和 偏 心 旋 转架 绕着 铰 接轴 旋转 , 结构 简 单实用 。
( 4 ) 整机 配重 比较 大 。
( 2 ) 需 整 体 吊移 。
方 案 2的优 点是 :
( 5 ) 虽有 四轮 在 牵 引 下 可 做 小 范 围平 行 移 动 ,
但 大范 围移 动仍 需整 机 吊移 。 对 2个 方 案 进 行 分 析评 审 后 , 确 定最 终 方 案 为 方案 1 。
车上 卸 下放 在翻 转 装 置上 , 卷 板 圆 弧 面要 紧贴 在 旋
转架 竖 直端 面 , 用 轮 胎 吊车 的 吊钩 吊住 旋 转 架 的水 ( 1 ) 冬季 雨雪 天气 , 轨道 需 要 随 时 清理 , 否则 走
翻转机构课程设计
翻转机构课程设计一、课程目标知识目标:1. 学生能够理解翻转机构的概念、分类和基本原理;2. 学生能够掌握翻转机构在工程实际中的应用及其优势;3. 学生能够了解翻转机构在生活中的具体实例及其作用。
技能目标:1. 学生能够运用所学知识,分析并设计简单的翻转机构;2. 学生能够运用绘图工具,绘制翻转机构的示意图;3. 学生能够通过小组合作,解决与翻转机构相关的实际问题。
情感态度价值观目标:1. 学生对翻转机构产生兴趣,激发探索机械原理的热情;2. 学生在小组合作中,学会沟通、协作,培养团队精神;3. 学生认识到翻转机构在工程和生活中的重要性,增强对科学技术的尊重和热爱。
课程性质:本课程为机械设计基础课程,旨在帮助学生掌握翻转机构的基本知识和应用。
学生特点:六年级学生,具备一定的物理知识和动手能力,对新鲜事物充满好奇心。
教学要求:结合学生的特点,注重理论与实践相结合,培养学生的动手能力和创新能力。
通过课程目标的具体分解,使学生在学习过程中能够达到预期的学习成果,为后续的机械设计学习打下基础。
二、教学内容1. 翻转机构概念与分类:介绍翻转机构的基本概念,区分不同类型的翻转机构,如曲柄滑块机构、齿轮齿条机构等。
- 教材章节:第二章第四节“翻转机构的概念与分类”2. 翻转机构原理:讲解翻转机构的工作原理,分析各类型翻转机构的特点及适用场景。
- 教材章节:第二章第五节“翻转机构的工作原理”3. 翻转机构的应用:通过案例分析,展示翻转机构在工程实际中的应用,如汽车发动机、机器人手臂等。
- 教材章节:第二章第六节“翻转机构的应用实例”4. 翻转机构设计与制作:引导学生学习翻转机构的设计方法,动手制作简单的翻转机构模型。
- 教材章节:第三章第一节“翻转机构的设计方法”;第三节“翻转机构的制作”5. 翻转机构在实际问题中的应用:结合实际问题,小组合作探讨翻转机构在解决具体问题中的应用。
- 教材章节:第三章第五节“翻转机构在实际问题中的应用”教学内容安排与进度:第一课时:翻转机构概念与分类第二课时:翻转机构原理第三课时:翻转机构的应用第四课时:翻转机构设计与制作(上)第五课时:翻转机构设计与制作(下)第六课时:翻转机构在实际问题中的应用教学内容确保科学性和系统性,结合教材章节进行详细的教学大纲制定,以便学生能够循序渐进地掌握翻转机构的知识和技能。
大型翻转提升机构的结构设计

大型H钢翻转提升机构设计摘要我国现如今的工业水平不断地发展,H钢运用的领域越发广泛,在提升和翻转那些笨重、体积很大零件不能只靠人力去完成,为了提高生产效率需要设计出一种设备来解决此问题。
在设计的同时需要考虑到传动装置变松以及润滑等问题。
本文首先对翻转机提升类型从其特点进行分析到选择,选择出链式翻转机构和液压式提升装置,对H钢翻转工作进行分析,设计出符合要求的元器件如轴,齿轮,皮带等,对部分件进行校核,为了元件相互协调配合,设备运行平稳。
最后设计出液压与电气系统组合,从而形成一套完整的工作体系从上升正反翻转、制动、下降。
提升机构选择形式为液压式,优点是重量轻、容易实现调速、使用寿命长。
缺点是油液对密封装置要求比较严苛容易泄露。
翻转机构使用链式传动,优点是摩擦性好、成本低。
缺点不耐冲击、质量大。
关键词 H钢;翻转机构;提升机构Design of Large Scale H Steel LiftingMechanismAbstractChina is now the level of industrial development, H steel used more and more widely in the field, lifting and turning of the heavy and large parts can not only rely on manpower to complete, in order to improve the production efficiency we need to design a device to solve this problem. At the same time the design should take into account the loose gear and lubrication problems.Based on the analysis of the types of hoisting machine turn to choose from its features, choose a chain turnover mechanism and a hydraulic lifting device for H steel turning work analysis, designed to meet the requirements of the components such as shaft, gear, belt and so on, to check the part, as the components of coordination, equipment running smoothly. Finally, the hydraulic and electrical system is combined to form a complete system of work, from rising, reverse, braking and descending.The selection of lifting mechanism is hydraulic, with the advantages of light weight, easy realization of speed controland long service life. The disadvantage is that the oil on the sealing device requirements are more stringent, easy to leak. The turnover mechanism adopts chain type transmission, and has the advantages of good friction and low cost. Disadvantages, no impact, high quality.Keywords H steel, turnover mechanism, lifting mechanism目录摘要 (I)Abstract ...................................................... I I第1章绪论.................................... 错误!未定义书签。
大型H钢翻转提升机构方案

论文摘要本文阐述了大型H钢翻转提升机构的设计,设计包括了机械结构设计和控制系统设计两部分。
机械结构部分采用了链式翻转、液压提升的结构组合。
包括传动系统设计、翻转机构的具体设计、液压缸的设计等。
控制系统采用了液压和机电结合的方式,利用液压控制系统的提升,机电控制系统的翻转操作。
为了降低系统的成本,控制系统采用的是继电器控制而不是现在比较流行的PLC控制。
关键词:H钢翻转机构提升机构AbstractThis text elaborated the large H steel inside out promote the design of the mrvhsnidm, the design included the machine structure design and the system design two fractions of control.The machine structure fraction adopted the type of chain inside out, the structure assemble that liquid presses to promote.The concrete design, liquid that designs the contents to include the drive system design, inside out mrvhsnidm presses design etc. of the urn.Control the system adopts the liquid to press and the mode of the machine electrical twinning, make use of the liquid to press to control the system to promote, inside out operation of the machine electric control system.For the sake of the step - down cost of the system, control what system adoption is a relay control but is not now than popular of control of PLC.Keyword: H steelInside out mrvhsnidmPromote the mr vhsnidm目录第1章绪论1.1 课题来源及研究的目的和意义随着经济的不断发展,大型工业与民用建筑不断的出现,以至使得像大型H 钢这样的钢材有着大量的市场需求。
钢板翻转机构设计

钢板翻转机构设计钢板翻转机构是一种用于将钢板翻转的装置。
在工业生产中,钢板翻转是常见的操作,用于在不同工艺过程中的钢板处理。
钢板翻转机构的设计和运行对于提高生产效率和保证产品质量至关重要。
一、钢板翻转机构的功能和原理钢板翻转机构的主要功能是将钢板从一种姿态翻转到另一种姿态,以满足不同工艺要求。
其原理是通过机构的运动,使得钢板在空间中旋转,实现翻转的目的。
钢板翻转机构通常由液压系统、电气控制系统和机械结构三部分组成。
二、钢板翻转机构的机械结构设计钢板翻转机构的机械结构设计包括支撑结构、传动装置、翻转装置等。
支撑结构是机构的基础,需要具备足够的强度和稳定性,以承受钢板的重量和运动力。
传动装置通常采用电动机与齿轮箱相结合,通过齿轮传动实现机构的运动。
翻转装置则是机构的核心部分,其设计要考虑到钢板的尺寸、重量和翻转角度等因素,以确保翻转过程的平稳和安全。
三、钢板翻转机构的液压系统设计钢板翻转机构的液压系统设计主要包括液压缸和液压阀组成。
液压缸负责提供动力,通过液压油的压力驱动机构的运动。
液压阀则控制液压缸的工作,实现机构的翻转功能。
设计时需要考虑液压系统的工作压力、流量和稳定性等因素,以满足机构的工作要求。
四、钢板翻转机构的电气控制系统设计钢板翻转机构的电气控制系统设计主要包括电气控制柜、传感器和执行器等。
电气控制柜负责集中控制机构的运动和工作状态。
传感器用于检测钢板的位置和角度等信息,以实现机构的自动控制。
执行器则根据电气控制信号控制液压系统的工作,实现机构的翻转操作。
五、钢板翻转机构的安全性设计钢板翻转机构的安全性设计至关重要。
在设计过程中,需要考虑到机构的稳定性、运动过程中的动力学特性和安全保护装置等因素。
同时,还需要制定相应的安全操作规程和培训计划,确保操作人员的安全意识和技术能力。
六、钢板翻转机构的应用领域和发展趋势钢板翻转机构广泛应用于钢铁、汽车、造船等行业,对于生产过程中的钢板处理起到关键作用。
钢板翻转机构综合

定义:通过人力操作实现钢板翻转的机构 特点:结构简单,操作方便,适用于小规模生产和维修 工作原理:通过杠杆、滑轮等简单机械原理实现钢板的翻转 应用场景:适用于小型钢板加工、维修和装配等场景
电动钢板翻转机构
定义:利用电机驱动翻转机构,实现钢板翻转的设备
缺点:液压系统的制造成本较高,需要定期维护和保养,否则容易出现泄漏和堵塞等问题;液压元件对油液的清洁度要求较高,需要使用过滤器 等装置来保证油液的清洁度。
气动钢板翻转机构的优缺点
优点:气动系统具有快速响 应、高精度定位和可靠性的 特点,能够实现高效、准确 的钢板翻转。
缺点:气动钢板翻转机构需 要配置气源和气动元件,增 加了系统的复杂性和成本。 同时,气动系统对气源的依 赖性较高,需要定期维护和 保养。
钢板翻转机构的重要性
提高生产效率: 钢板翻转机构 能够快速翻转 钢板,减少人 工操作,提高
生产效率。
保证产品质量: 通过精确控制 翻转角度和翻 转速度,钢板 翻转机构能够 保证产品质量
和精度。
降低劳动强度: 使用钢板翻转 机构可以减轻 工人的劳动强 度,提高工作
效率。
适应大规模生 产:钢板翻转 机构适用于大 规模生产和自 动化生产线, 能够满足现代 化工业生产的
特点:高效、稳定、安全可靠,适用于大规模钢板加工和物流运输 工作原理:通过电机驱动翻转机构,使钢板在水平和垂直方向上实现翻 转 应用场景:广泛应用于钢板加工、物流运输、仓储等行业
液压钢板翻转机构
定义:利用液压系统进行翻转的钢板翻转机构 特点:翻转力大,可实现大吨位钢板的翻转 应用:广泛应用于钢铁、船舶、汽车等行业的钢板加工和运输 工作原理:通过液压缸的伸缩运动,实现翻转机构的升降和翻转
钢板翻转机构的应用前景展望
大型翻转提升机构的结构设计

大型H钢翻转提升机构设计摘要我国现如今的工业水平不断地发展,H钢运用的领域越发广泛,在提升和翻转那些笨重、体积很大零件不能只靠人力去完成,为了提高生产效率需要设计出一种设备来解决此问题。
在设计的同时需要考虑到传动装置变松以及润滑等问题。
本文首先对翻转机提升类型从其特点进行分析到选择,选择出链式翻转机构和液压式提升装置,对H钢翻转工作进行分析,设计出符合要求的元器件如轴,齿轮,皮带等,对部分件进行校核,为了元件相互协调配合,设备运行平稳。
最后设计出液压与电气系统组合,从而形成一套完整的工作体系从上升正反翻转、制动、下降。
提升机构选择形式为液压式,优点是重量轻、容易实现调速、使用寿命长。
缺点是油液对密封装置要求比较严苛容易泄露。
翻转机构使用链式传动,优点是摩擦性好、成本低。
缺点不耐冲击、质量大。
关键词H钢;翻转机构;提升机构Design of Large Scale H Steel Lifting MechanismAbstractChina is now the level of industrial development, H steel used more and more widely in the field, lifting and turning of the heavy and large parts can not only rely on manpower to complete, in order to improve the production efficiency we need to design a device to solve this problem. At the same time the design should take into account the loose gear and lubrication problems.Based on the analysis of the types of hoisting machine turn to choose from its features, choose a chain turnover mechanism and a hydraulic lifting device for H steel turning work analysis, designed to meet the requirements of the components such as shaft, gear, belt and so on, to check the part, as the components of coordination, equipment running smoothly. Finally, the hydraulic and electrical system is combined to form a complete system of work, from rising, reverse, braking and descending.The selection of lifting mechanism is hydraulic, with the advantages of light weight, easy realization of speed control and long service life. The disadvantage is that the oil on the sealing device requirements are more stringent, easy to leak. The turnover mechanism adopts chain type transmission, and has the advantages of good friction and low cost. Disadvantages, no impact, high quality.Keywords H steel, turnover mechanism, lifting mechanism目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题研究的背景及意义 (1)1.2 国内外研究现状 (1)1.2.1 国外发展现状 (1)1.2.2 国内发展现状 (2)1.3 本课题的研究内容 (4)第2章翻转提升机构的总体设计 (5)2.1 翻转和提升机构采用形式的确定 (5)2.1.1 翻转机构的确定 (5)2.1.2 提升机构的确定 (7)2.2 H钢翻转的工作原理 (9)2.3 大型H钢翻转提升机构的简图 (9)2.4 本章小结 (10)第3章翻转提升机构的结构设计 (11)3.1 链条及链轮的选择设计 (11)3.1.1 链条的设计选择 (11)3.1.2 链轮的设计选择 (12)3.1.3 滑轮的设计选择 (13)3.1.4 润滑油的选择 (14)3.2 电机的选择 (14)3.3 带传动及齿轮的设计及计算 (15)3.3.1 皮带传动的设计 (15)3.3.2 V带轮的设计 (17)3.3.3 皮带张紧装置的选择 (19)3.4 轴的结构设计与校核 (19)3.4.1 轴的设计计算 (19)3.4.2 滚动轴承的校核 (21)3.4.3 键的校核 (22)3.5 本章小结 (22)第4章翻转提升机构的液压与电气的系统设计 (23)4.1 机构液压系统的设计 (23)4.1.2 液压系统的原理及元件选择 (27)4.2 机构电气控制系统设计 (29)4.3 机构的系统工作过程 (30)4.4 本章小结 (31)第5章三维模型的建立 (32)5.1 建立零件 (32)5.2 零件图的装配 (32)5.3 三维模型 (34)5.4 本章小结 (34)结论 (35)致谢 (36)参考文献 (36)附录A (38)附录B (45)第1章绪论1.1课题研究的背景及意义现如今社会经济飞速发展,国家不断强调工业并大力投入工业设计发展,建筑业与大型工业更是不断发展,像大型H钢这样的钢型会用到很多,所以有着大量的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维建模及各零件设计
1整体构型
三维建模及各零件设计
三维建模及各零件设计
2零件建模
左右翻板
三维建模及各零件设计
翻板轴支架 翻板轴
左侧输入轴 翻板轴轴套
三维建模及各零件设计
右侧输入轴 齿轮轴
连杆连接轴 构架方管
三维建模及各零件设计
3装配体装配
输入轴支座
三维建模及各零件设计
翻板轴支座
三维建模及各零件设计
详细计算过程见word说明书P26-31
联轴器的选择
根据本次设计的要求选择凸缘联轴器。 原因:该联轴器对两轴中性的要求很高,且当两轴有 相对位移存在时,就会在机件内引起附加载荷,使工 作情况恶化。但是该联轴器的构造简单、成本低、可 传递较大的扭矩,故对于该步进送料机构运用凸缘联 轴器完全满足要求。
L2+L3>L1+CD L2+L3>L1+AE
电机选择
1 选择电动机类型 电动机的类型根据动力源和工作要求(带周期性变动负载 的机械,大中功率) 选用Y2系列(IP54)全封闭自扇冷式三相异步电动机,额定 电压380V,频率50Hz。 2选择电动机容量 对钢板在不同翻板上分别仿真,在重力作用下,如图3-2-1当 钢板在左翻板上时对左翻板施加3920N竖直向下的力,测得 左侧输入轴转矩与时间图
方案一
仿真视频
采用对称两组四连杆机
构,两套杆组的相位差 20度,恰能够在左翻板 到达竖直位置偏左10度 时与右翻板相遇并且一
起运动至右侧十度再分 开。
对称杆组数据和方案三一致,此方案仅不能满足同时从水平位置出发
方案确定
方案二
仿真视频
采用四个四杆机构,但是最外面两组是平行四边形杆组,故可以简化成为两个基本四杆机 构。但是杆长是经过多次尝试确定,不可缩小,整体占面积过大。
由于翻转机节省能源,安全可靠,后期维护费用低,可 以用在钢厂中厚板车间使用,尤其在翻转厚钢板方面有更加 突出优势,能够有效提高产品质量,增强产品竞争力。系统 运行稳定、可靠,故障点容易查找,维护量小,大大减少人 工劳动强度,延长设备使用寿命,减少维护量,提高综合效 益。
谢谢!
答辩人:
40.35N m
1 轴即高速轴的计算
P1 P01 3 0.99 2.87kW
n1 n 710r / min
T1
9550
P1 n1
38.60 N m 5.3.3
3 2 轴即中间轴的计算
P2 P12 2.87kW 0.99 2.84kW
n2
钢板翻转机构综合一
答辩人:、
已知条件
1)原动件由旋转式电机驱动 2)每分钟翻钢板10次; 3)其他尺寸如图所示; 4)许用传动角[γ]=50°;
钢板翻转机构工作原理图
机构运动过程分析
1,当钢板T由辊道送至左翻板W1。 2,W1开始顺时针方向转动。转至铅垂位置偏左10°左右时,与 逆时针方向转动的右翻板W2会合。 3,W1与W2一同转至铅垂位置偏右10°左右,4,W1折回到水平 位置,与此同时,W2顺时针方向转动到水平位置,从而完成钢 板翻转任务。
电机选择
当钢板在右翻板上时对左翻板 施加3920N竖直向下的力,测 得右侧输入轴转矩与时间图
电机选择
电机选择
3,转速选择
4 ,型号选择
电机选择
减速器的设计
1 传动装置的总传动比
翻板工作要求1min完成十次翻板故曲柄轴转速n=10r/min ,所选用电动机工作转速为710r/min, 电机与曲柄之间的总传动比为:71 2 分配传动装置各级传动比
n1 i12
710 3.4
208r / min
T2
9550 P2 n2
130.45N * m
4 3 轴即低速轴的计算
P3 P22 2.76 kW 0.99 2.73kW
n3
n2 i23
208 4.1
51r / min
T3
9550
P3 n3
511.66 N齿轮设计
减速器的齿轮设计
减速器的齿轮设计
链轮设计
1 选择链轮齿数及传动比
3确定链条型号和节距p
由设计要求,该链轮仅传递转动,传动比 i=1,为了减小空间占用选取 Z1=Z2=17。 查《机械设计》【2】图9-11选区链号为20A,再查表9-1得节距p=31.75mm
四连杆在运动时摇杆的角速度不能随意改变,故 相遇前左板w小于右板,相遇中两板w相等,相遇 后左板w大于右板,不可能完全靠四杆机构完成
参数设计与计算
2,两套连杆尺寸设计(左)
B
F
1,确定机架位置 2,做出极限位置杆位置 3,测量相应杆长 计算思路
已知机架参数 DE=600mm,CE=150mm,取如图所示两个极限位 置,由题知
查表得工况系数K A 1.0
主动链轮齿数系数K Z 1.54
L p0
2 a0 p
z1 z2 2
109
计算最大中心距
多排链系数K p 1 传递得功率P T n 91410 0.95kW,代入式(6 —1)
9550 9550
a max
p( Lp 2
z )
31.75
(109 -17 ) 2
1460.5mm
1449 .94(设计所需中心距 )
得Pca 1.463kW
运动仿真
角度时间图与角速度时间图对应起来看,翻版左可以实现转100度,右翻版可以实现80 度,并且当左翻版转100度与右翻版交接时角速度接近0,使得交接过程非常平稳
关键部位校核
7.1翻板静应力校核 7.2连杆连接轴校核 7.3长连杆拉应力校核 7.4翻板轴校核 7.5 轴承的校核
∠ACF=100°,,曲柄长L1,连杆L2,摇杆L3 在△BCF中,L3=BC=CE/cos50°=233.35mm
BE=EF=CE*tan50° 因为BD=L2-L1,
DF=L2+L1 又BD=DE-BE,DF=DE+EF 解得:
L1=178.77 mm, L2= 600mm, L3=233.38mm
方案三
机构简图
采用两组曲柄摇杆实现翻转要求
方案四
机构简图
采用两组曲柄摇杆实现翻转要求
参数设计与计算
1,极为夹角确定
为了保证交接过程平稳可靠,即为了保证两板在平行 位置能够同时旋转,基本上保持同步旋转,两套连杆 机构的极位夹角是一定的。左板转动110度右板转动 80度,极位夹角应该(11-8)/22*360°=32.72°
参数设计与计算
2,两套连杆尺寸设计(右)
A
E E
B
D
C
思路
1,确定机架位置 2,做出极限位置杆位置 3,测量相应杆长 计算BC-CD-AC 已知机架参数CE=400mm,CA=150mm,∠BDC=80° 设曲柄长L1,连杆L2,摇杆L3 在三角形ABD中 BC=CD=AC*tan40°=125.86mm, L3=AB=AC/cos40°=195.81mm 因为BE=BC+EC,
DE=CE-CD 即
BE=L1+L2,
DE=L2-L1, 解得:
L1=125.86mm
L2=400 mm
L3= 195.81mm
参数设计与计算 3.曲柄存在条件验证
L1=178.77 mm, L2= 600mm, L3=233.38mm CD=618.47mm L1=125.86mm,L2=400 mm L3= 195.81mm,AE=427mm
联轴器及装配
三维建模及各零件设计
连杆的装配方式
三维建模及各零件设计
滚筒即链轮
三维建模及各零件设计
齿轮轴及减速器总装
设计总结
在翻转机的设计过程中,利用三维软件做仿真分析我发现, 三维软件对复杂机构进行设计具有准确性高和设计效率高的 优点,而且仿真分析对机构验证和安装调试具有很好的指导 作用。
设计过程中参照的翻转机,工作可靠,钢板交接平稳, 逆向翻转也没问题,能够很好的完成翻板任务。
2 计算当量的单排链计算功率 Pca
4计算链节数和中心距
根据链传动的工作情况、主动链轮齿数和链条排数,将链传动所传递的功率修正
为
当
量
的
单
排
链
计
算
功
率 初选中心距a0=46p=1460.5mm
计算链节数
Pca
KAz Kz Kp
P — — — — — — — — — — — — — —(6 -1)
按照分配原则:使各级传动的承载能力大致相等(齿面接 触强度大致相等):使减速器获得最小外形尺寸:各级传 动大齿轮浸油深度大致相等,查阅《机械设计手册》【1 】
减速器的设计
减速器的动力参数
1 0 轴即电动机轴的计算
P0 Ped 3k W
n0 n 710r / min
T0
9550 P0 n0