5.5 控制系统的相对稳定性
机械工程控制基础第五章系统稳定性分析

9/88
5.3 代数稳定性判据 劳斯判据
Logo
同时,如果劳斯阵列中第一 列所有项均为正号,则系统 一定稳定。
劳斯阵列为
sn a0 a2 a4 a6 s n1 a1 a3 a5 a7 s n2 b1 b2 b3 b4 s n3 c1 c2 c3 c4
由劳斯阵列的第一列看出:第一列中系数符号全为正
值,所以控制系统稳定。
16/88
Logo
5.3 代数稳定性判据 劳斯判据
例2 设控制系统的特征方程式为
s4 2s3 3s2 4s 3 0
试应用劳斯稳定判据判断系统的稳定性。
解:首先,由方程系数可知已满足稳定的必要条件。其次,排劳
阵列
s4 1 3 3
2/88
5.1 系统稳定性的基本概念
d
o
F
Logo
b
c
M
o
稳定性的定义:若控制系统在任何足够小的初始偏差的 作用下,其过渡过程随着时间的推移,逐渐衰减并趋于 零,具有恢复到原来状态的性能,则该系统是稳定的, 否则,该系统为不稳定。
3/88
Logo
5.2 系统稳定的充要条件
N(s)
X i s
+
G1 s
➢ 劳斯判据还说明:实部为正的特征 根数,等于劳斯阵列中第一列的系 数符号改变的次数。
12/88
5.3 代数稳定性判据 劳斯判据
Logo
劳斯判据的表述:
1.系统闭环传递函数特征方程式的系数没有为0的, 同时都是正数。(必要条件,要想系统稳定必 须满足这个条件)
2.劳斯阵列的第一列全部为正。(充分条件)
第5章控制系统的稳定性

5.2 代数稳定性判据 1. 系统稳定性的初步判别(必要条件) 设系统的闭环特征方程式为如下标准形式:
2. 劳斯稳定判据
直至其余 项均为零。
按此规律一直计算到n -1行为止。
结论:
考察阵列表第一列系数的符号。假若劳斯阵列 表中第一列系数均为正数,则该系统是稳定的; 假若第一列系数有负数,则系统不稳定,并且 第一列系数符号的改变次数等于在右半平面上 根的个数。
不稳定的程度,因而不能提出改善系统性能的具体途径。 Nyquist判据特点:
① 图解法:由几何作图判定系统稳定性; ② 由开环特性判断闭环系统稳定性(开环特性由分析 法或实验法获得); ③ 可判断系统相对稳定性; ④ 可指出各环节对系统稳定性的影响。
5.3 Nyquist稳定判据
一、幅角原理(Cauchy) 对于复变函数
例 系统特征方程为 判别系统的稳定性。
解:(1)系统特征方程的系数满足系统稳定的必要条件。
(2)列写劳斯阵列表如下:
第一列 为零
系统不稳定 ,且有两个 根具有正实 部
练习 系统特征方程为
判别系统的稳定性。
系统不稳定 ,且有两个 根具有正实 部
若劳斯阵列表中某一行(设为第k行)的所有系数均 为零,则说明在根平面内存在一些大小相等,并且关于 原点对称的根。
能恢复原来的平衡状态。
5.1 系统稳定性的基本概念
如果系统受到扰动后,偏离了原来的平衡状态,而 当扰动取消后,系统又能够逐渐恢复到原来的状态,则 称系统是稳定的,或具有稳定性的。否则称系统是不稳 定的,或不具有稳定性。
控制系统的稳定性也可以这样定义:若控制系 统在任何足够小的初始偏差作用下,其过渡过程随 着时间的推移,逐渐衰减并趋于零,具有恢复原来 平衡状态的性能,则称该系统为稳定;否则,称该 系统为不稳定。
自动控制原理-第5章4

K = 5.2
Kg (dB) h(dB)
h(dB)
Phase (deg)
-135
γ
γ
γ
1
-180
-225 10
0
10 Frequency (rad/sec)
K ↑ ωc ↑
ωc
由题意知
kg = 10
K
2 g 2 g
G ( jω g ) = 0.1
= 0.1
ω g (1 + 0.04ω )(1 + 0.0025ω )
γ = 180° +
G ( jω c ) H ( jω c )
γ
当 γ > 0 时,相位裕量为正值; 当 γ < 0 时,相位裕度为负值。 为了使最小相位系统稳定,相位裕度必须为正。 在极坐标图上的临界点为0分贝和 180°
2增益裕度(Gain Margin) kg
也称幅值裕度
在相移∠G(jω)H(jω)等于-180°的频率ωg上,开环 幅频特性| G(jω)H(jω)|的倒数,称为幅值裕度,用kg表示。 1 定义幅值裕度为 kg = G ( jω g ) H ( jω g ) 幅值裕度kg 的含义是, 对于闭环稳定系统,如果系统开环幅频特性再增大 倍,则系统将变为临界稳定状态。
G ( jω ) =
K (τ 1 jω + 1)(τ 2 jω + 1) (τ m jω + 1) ( jω )ν (T1 jω + 1)(T2 jω + 1) (Tn ν jω + 1)
n>m
1相位裕度 (Phase Margin) γ
也称相角裕度
在系统的剪切频率ωc上,使闭环系统达到临界稳定 (达到-180°),相频特性所需附加的相移量 定义相角裕度为 相角裕度的含义是 对于闭环稳定系统,如果开环相频特性再滞后 度,则系统将变为临界稳定。
自动控制原理--第五章-频率特性法

3. 频率特性随输入频率变化的原因是系统往往含有电容、电感、 弹簧等储能元件,导致输出不能立即跟踪输入,而与输入信号 的频率有关。
4.频率特性表征系统对不同频率正弦信号的跟踪能力,一般有 “低通滤波”与“相位滞后”作用。
2024年5月3日
2024年5月3日
若用一个复数G(jω)来表示,则有 G(jω)=∣G(jω)∣·ej∠G(jω)=A(ω)·ej 指数表示法
G(jω)=A(ω)∠ (ω) 幅角表示法
G(jω)就是频率特性通用的表示形式,是ω的函数。
当ω是一个特定的值时,可以 在复平面上用一个向量去表示G (jω)。向量的长度为A(ω),向量
频率特性的数学意义
频率特性是描述系统固有特性的数学模型,与微分方程、 传递函数之间可以相互转换。
微分方程
(以t为变量)
d s
dt
传递函数
(以s为变量)
s j 频率特性
(以ω为变量)
控制系统数学模型之间的转换关系
以上三种数学模型以不同的数学形式表达系统的运 动本质,并从不同的角度揭示出系统的内在规律,是经 典控制理论中最常用的数学模型。
R() A()cos()
I () A()sin()
2024年5月3日
以上函数都是ω的函数,可以用曲线表示它 们随频率变化的规律,使用曲线表示系统的频率 特性,具有直观、简便的优点,应用广泛。
并且A(ω)与R(ω)为ω的偶函数, (ω)与I
(ω)是ω的奇函数。
2024年5月3日
三、频率特性的实验求取方法
css(t) =Kce-jωt+K-cejωt
系数Kc和K-c由留数定理确定,可以求出
5.5 控制系统的相对稳定性

1 − 0.2ω g × 0.05ω g = 0
ω g = 10
10
在ωg处的开环对数幅值为
K g = −20 lg G ( jωg ) H ( jωg )
= −20 lg 1 jω g (1 + j 0.2ω g )(1 + j 0.05ω g )
= 20 lg 10 + 20 lg 1 + (0.2 × 10) 2 + 20 lg 1 + (0.05 × 10) 2
为了确定系统的相对稳定性往往需要同时给出这两关于相角裕度和幅值裕度的几点说明关于相角裕度和幅值裕度的几点说明控制系统的相角裕度和幅值裕度是系统靠近稳定边界程度的度量
5.5 控制系统的相对稳定性
1
设计控制系统,要求它必须稳定,这是控制系统赖以正常工作 设计控制系统,要求它必须稳定, 的必要条件。除此之外,还要求控制系统具有适当的相对稳定性。 的必要条件。除此之外,还要求控制系统具有适当的相对稳定性。 相对稳定性的概念:基于Nyquist判剧 判剧, 相对稳定性的概念:基于Nyquist判剧,当控制系统的开环传 递函数在s平面右半部无极点时,其开环频率响应G(jω (jω 递函数在s平面右半部无极点时,其开环频率响应G(jω)H (jω)若通 过点( ),则控制系统处于临界稳定边缘 则控制系统处于临界稳定边缘。 过点(-1,j0),则控制系统处于临界稳定边缘。在这种情况下若 控制系统的参数发生漂移, 控制系统的参数发生漂移,便有可能使控制系统的开环频率响应包 围点( ),从而造成控制系统不稳定 因此, 从而造成控制系统不稳定。 围点(-1,j0),从而造成控制系统不稳定。因此,在Nyquist 图 开环频率响应与点( 上,开环频率响应与点( -1,j0 )的接近程度可直接表征控制系 统的稳定程度。 统的稳定程度。 其定性关系是: Nyquist图上 G(jω (jω)不包围点( 图上, ω)不包围点 其定性关系是:在Nyquist图上, G(jω)H (jω)不包围点(-1,j0) 的情况下, G(jω (jω)离点( ω)离点 j0)越远,说明具有P=0的控 的情况下,若 G(jω)H (jω)离点(-1,j0)越远,说明具有P=0的控 制系统的稳定性程度越高;反之,G(jω (jω)越靠近点( ω)越靠近点 制系统的稳定性程度越高;反之,G(jω)H (jω)越靠近点(-1,j0) ,则 上述系统的稳定程度越低。在控制系统稳定的基础上, 上述系统的稳定程度越低。在控制系统稳定的基础上,进一步用以 表征其稳定程度高、低的概念, 表征其稳定程度高、低的概念,便是通常所谓的控制系统的相对稳 定性。 定性。
控制系统稳定性控制
控制系统稳定性控制控制系统的稳定性是指在系统输入和干扰的作用下,系统输出能够保持在一定范围内,并且不会发生剧烈的波动或不稳定的情况。
稳定性是控制系统设计和优化中的重要考虑因素,它直接关系到系统的性能和可靠性。
一、稳定性的基本概念在控制系统中,稳定性可以分为两类:绝对稳定性和相对稳定性。
绝对稳定性是指当系统的任何初始条件和参数变化都不会引起系统的输出超出一定范围,系统始终保持稳定。
相对稳定性是指系统在参数变化或干扰作用下,虽然会有一定的波动或震荡,但最终输出会趋于稳定。
二、稳定性判断的方法常用的判断控制系统稳定性的方法有两种:时域方法和频域方法。
1. 时域方法时域方法是通过分析系统的状态方程或差分方程来判断系统的稳定性。
常用的判断方法有:极点位置判据、Nyquist稳定性判据、Hurwitz 稳定性判据等。
极点位置判据是指通过分析系统极点的位置来判断系统的稳定性。
当系统的所有极点的实部都小于零时,系统是稳定的。
Nyquist稳定性判据是将控制系统的开环传递函数绘制在复平面上,通过分析曲线的轨迹来判断系统的稳定性。
Hurwitz稳定性判据是通过分析系统特征方程的Jacobi矩阵行列式来判断系统的稳定性。
2. 频域方法频域方法是通过分析系统的频率响应来判断系统的稳定性。
常用的判断方法有:Bode稳定性判据、Nyquist稳定性判据等。
Bode稳定性判据是通过分析系统的频率响应曲线的相角和幅值来判断系统的稳定性。
当系统幅值曲线超过0dB的频率点相角为-180°时,系统是稳定的。
三、控制系统稳定性的控制方法为了保证控制系统的稳定性,通常采取以下方法进行控制:1. 增加稳定裕度稳定裕度是指系统在保持稳定的前提下,对参数变化或负载波动的容忍能力。
通过增加稳定裕度,可以提高系统的鲁棒性和可靠性。
常用的方法有:采用PID控制器、增加系统正反馈等。
2. 优化控制器参数优化控制器参数是通过对系统的传递函数进行分析和调节,使系统的性能指标达到最优。
机械控制工程基础5-5
P 0
临 界 稳 定 稳 定
G3 大K值 G2
1
G1 小K值
机电汽车工程学院 开环稳定系统
1/28
系统的相对稳定性通常用稳定裕度表示,常使 用两个量表示系统稳定裕度:
① 相位裕度 ② 幅值裕度Kg
2/28
机电汽车工程学院
一、相位裕度 定义:对应于w=wc(剪切频
率)时,相频特性距-180°线 的相位差值称为相位裕度。
5.5 系统的相对稳定性
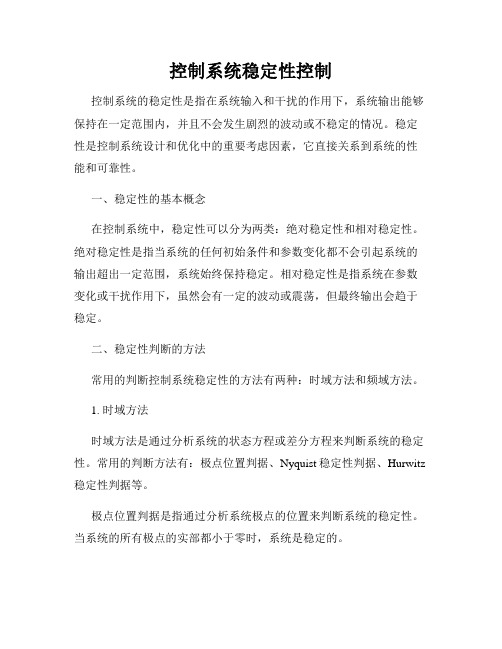
如图示,K为控制系统的开环增益。K值较小时,
系统稳定;K值较大时,系统不稳定的;K取两者间
的某个值时,Nyquist曲 线通过(-1,j0)点,系统处 于临界稳定状态。由此图 我们可以看出,GK(jw)对 G平面
-1
不 稳 定
Im
Re
点(-1,j0)的靠近程度,可
作为表征系统相对稳定性 的一个指标。
w G ( s) H ( s) 2 s( s 2 2 wn s w n )
2 n
这是系统的开环Nyquist
曲线,初步看出,系统的相
位裕量很大,而幅值裕量却
很小。进一步应用Bode图
进行分析:
17/28
机电汽车工程学院
2 wn 2 s( s 2 2wn s w n )
相位裕度大,而幅值裕度过小的原因是,系统的阻尼比 18/28 太小,振荡环节的幅频特性峰值很高所导致。 机电汽车工程学院
0.2 K
180 (w c )
幅值裕量的表达式:
jw (1 jw )(1 j ) 5
w
1 K g (dB ) 20 lg 20 lg G ( jw g ) H ( jw g ) G ( jw g ) H ( jw g )
控制系统的稳定性和特性课件

控制系统面临着诸多挑战,如鲁 棒性、可靠性、稳定性等问题, 需要不断进行研究和改进。
控制系统的未来发展趋势和展望
发展趋势
未来控制系统的发展趋势将包括更加智能化、微型化和网络化,同时还将更加 注重节能和环保。
展望
随着技术的不断进步和发展,控制系统将实现更加高级别的自动化和智能化, 同时还将更加注重安全性和可靠性。未来控制系统将在更多领域得到应用,为 人类带来更加便捷、高效、安全的生活和工作环境。
控制系统的性能指标
01
02
03
04
快速性
控制系统应能迅速对输入信号 做出响应,并达到期望的输出。
准确性
控制系统应能精确地跟随输入 信号,并尽量减少误差。
抗干扰性
控制系统应能对外部干扰做出 正确的响应,并保持稳定的输
出。
鲁棒性
控制系统应能在不同的条件下 保持稳定的性能。
控制系统的时域特性
01
02
03
阶跃响应
控制系统对阶跃输入的响 应,用于分析系统的稳定 性和性能。
脉冲响应
控制系统对脉冲输入的响 应,用于分析系统的动态 性能。
频率响应
控制系统对正弦输入的响 应,用于分析系统的频率 特性。
控制系统的频域特性
奈奎斯特图
通过绘制奈奎斯特图可以 分析控制系统的稳定性、 性能和阻尼特性。
伯德图
通过绘制伯德图可以分析 控制系统的频率响应、相 位和增益裕度。
智能控制理论
基于人工智能和优化算法进行系统 设计,方法包括模糊控制、神经网 络控制等。
控制系统的优化方法
解析优化
使用数学解析方法求解控制系统 的最优解,例如使用拉格朗日乘
数法进行约束优化。
机械工程控制基础--系统的稳定性概述

57 5
2
33 5
51010 5
10
33
5 2 510 33 5
13834
184 3310 184 33
510
10
劳斯表第一列元素变号 2次,有2个正根,系统不稳定
机械工程控制基础
5.2 Routh(劳斯)稳定判据
(3) 劳斯判据特殊情况处理
例3:D(s)=s3-3s+2=0 判定在右半平面的极点数。
由闭环特征多项式系数(不解根)判定系统稳定性
不能用于研究如何调整系统结构参数来改善系统稳定性及 性能的问题
频域稳定判据 —
Nyquist 判据 对数稳定判据
由开环频率特性直接判定闭环系统的稳定性
可研究如何调整系统结构参数改善系统稳定性及性能问题
机械工程控制基础
5.3 Nyquist(乃奎斯特)稳定判据
Ai e it
0
充分性: i 0 i 1, 2, , n
i 1
i 0 i 1, 2, , n
n
t
k(t ) Aieit 0
i 1
系统稳定的充要条件:系统所有闭环特征根均具有负的实部,
或所有闭环特征根均位于左半s平面。
机械工程控制基础
5.2 Routh(劳斯)稳定判据
避免直接求解特征根,讨论特征根的分布 D(s) ansn an1sn1 a1s a0 0 (an 0)
列劳斯表
s5 1 12 35
s4 3 20 25
16
s3 3
80 3
s2 5
25
s1 0
0
s0
312 20 3
16 3
335 3
25
80 3
机械工程控制基础
控制系统稳定性分析
s0 63 F(s) s4 3s2 2 统 (s不2 稳1)定(s2。 2) 0
D s s5 s4 4s3 24s2 3s 63
s2 3 s3 s2 s 21
例 F(s)=N2sy+q1 uist稳定顺时判针据方向定义为闭合 jv
=-6
d1=
-6*5 -1*0 -6
=5
特征方程有两个正实部根,系统不稳定。
Routh稳定判据
例: 系统如图所示,试确定系统稳定时放大倍数K的取值范围。
R(s) E(s)
K
C(s)
解:闭环传递函数
S(0.1S 1)(0.25S 1)
GB ( s)
S(0.1S
K 1)(0.25S
1)
K
特征方程: D(s)=s3+14s2+40s+40K=0
Routh表:
s3 1 40 s2 14 40K
b1=
14*40 -1*40K 14
>0
系统稳定的条件:
s1 b1 s0 c401K
560-40K>0
40K>0
14>K>0
试判断有几个特征方程根位于S=-1之右?令 s=z-1
如特征R方ou程th:稳定D(判s)=据s3+2s2+s+2=0
Routh稳定判据
设系统的特征方程为 D(S) anSn an1Sn1 ...... a1S1 a0 0 根据特征方程的各项系数排列成Routh判据表(n=5 为例):
S5 a5 a3 a1 S 4 a4 a2 a0
b1
a4a3 a2a5 a4
第五章_控制系统的稳定性分析
如果劳斯表中第一列系数的符号有变化,其变化 的次数等于该特征方程式的根在S的右半平面上的 个数,相应的系统为不稳定。
16
【例5-1】:特征方程为:a0 s3 a1s 2 a2 s a3 0 ,试判断
稳定性。 [解]:劳斯阵为: s 3 a0
s s
2 1
a2 a3
a1
s0
a1a2 a0 a3 a1 a3
劳斯阵的组成
13
表中 b1 a1 a 2 a0 a3 a a a a a a a a , b2 1 4 0 5 , b3 1 6 0 7 a1 a1 a1
b1 a3 a1b2 b1 a5 a1b3 b1 a7 a1b4 c1 , c2 , c3 b1 b1 b1 e1 d 2 d1e2 f1 e1
i ( s ii ) i i 1 i2 2 2 s p s 2 s j 1 i 1 j i i i
aj
n2
7
y2 (t ) e
j 1
n1Leabharlann p jt i e ii t cosi 1 2 t i e ii t sin i 1 2 t
21
【例5-4】:S 6 2S 5 8S 4 12S 3 20S 2 16S 16 0 列劳斯表
S6 S5 S4 S3 S2 S
1
1 2 2 0 8 6 8 3 16
8 12 12 0 24 16 0
20 16 16 0
16 0
由上表可知,第一 列的系数均为正值, 表明该方程在S右半 平面上没有特征根。 令F(s)=0,求得两 对大小相等、符号 相反的根
5-5 控制系统的相对稳定性
试求出该系统的幅值裕度和相角裕度。 解 系统的开环频率特性为
G( jω)H( jω) =
其幅频特性和相频特性分别是
G( jω)H( jω) =
40 jω(25 −ω2 + j2 ) ω
1
40
ω (25 −ω2 )2 + 4ω2 2ωc ∠G( jωc )H( jωc ) = −900 − arctg 2 25 −ωc
1
已知两个最小相位系统的奈氏曲线如图(a)和(b)红线所示。 当系统参数变化,使开环放大倍数增加50%后,两系统的奈氏曲线分 别如图中虚线所示,分析稳定性。
Im
[GH]
Im
[GH]
−1
· ·
A′
A
0
ω = +∞
Re
B′
· −1 ·
0 ←ω
B
0
ω = +∞
Re
0 ←ω
0 ←ω
0 ←ω
(a)
(b)
系统的相对稳定性
dB
L(ω)
− 20dB/ dec
ωc
ω
5
1/ Kg (dB)
2
− 60dB/ dec
度 φ(ω)
− 900
γ
−1800
− 2700
ωg
ω
例5-9题Bode图
13
比较上述三种解法可知: 解析法 比较精确,但计算步骤复杂,而且对于三阶以上的高
阶系统,用解析法是很困难的。 图解法 以极坐标图和伯德图为基础的图解法,避免了繁锁的
[GH]
Im
[GH]
γ
−1
ω = +∞
5.5生态系统的稳定性

提高生态系统的稳定性
保持与提高生物的数量,保护生物的 多样性,提高生态系统的抵抗力稳定性。
提高生态系统的稳定性
保护草本、苔藓、地衣等耐性强,繁 殖快的小植物和各种小型动物,提高生态 系统的恢复力稳定性。
提高生态系统的稳定性
保护和建设多种不同类型的局部生态 系统,形成互补生态。提高生态系统的综 合稳定性。
一、生态系统的自我调节能力
阅读课文 生态系统具有自我调节能力的实例有哪些? 思考讨论:构建负反馈调节的概念模型。 生态系统自我调节能力的基础是什么? 大小:一般,生态系统组成成分越多样,能 量流动和物质循环的途径越复杂,其调节能 力越?
生态系统的自我调节能力是无限的吗?
森林中,如果害虫数量增加,那么森林会 实例一: 被破坏吗?
生物圈2号的启示
自然界不同于人工控制系统,大而全的设计导致
了顾此失彼。生物圈二号内的土壤均来自一个地方,
不像地球那样不同地带有不同的土壤类型。模拟的各
类生态系统的空间分布格局及大小比例不合理。地球
上生态系统内的生物间关系很复杂,目前人类还未全
面了解生物间的协调性。它最重要的启示在于:我们
人类目前对地球的了解还是远远不够的,目前最好的 办法还是保护和利用好地球,进行环境保护和生态恢 复是实现人类可持续发展的必由之路。
下列选项中,可以增加抵抗力稳定性的是 A.增加该生态系统内各营养级生物的种类 B.使生产者和消费者数量保持平衡 C.减少该生态系统内各营养级生物的种类 D.减少该生态系统内捕食者和寄生生物 的数量
农田生态系统比自然生态系统恢复力稳定性 高的原因是
A 人的作用非常突出 B 需要不断地播种、施肥、灌溉等人为劳动 C 种植地植物种类少,营养结构简单 ,且 环境条件好 D 其产品运输到系统外
5-5 控制系统的相对稳定性
在上例中,先作出系统的开环频率 特性曲线如图所示,作单位圆交开环频 率特性曲线于A点,连接 0A,射线OA与 负实轴的夹角即为系统的相角裕度。
j
[GH ]
1
Kg
−1
ωg
ω = +∞
1
Re
0
γ ≈ 80 。开环频率特性曲线与负实轴
0
γ
ωc
的交点坐标为 ( 0 .8, j 0 ) 由此得到系统的幅值裕度
ωg
Im
j
−1
0 ω =∞
Re
1
ωc
− j
例5-11极坐标图
End
ωg
1 K
Im
j
[GH ]
g
幅值裕度(Kg) 相位穿越频率所对 应的开环幅频特性的倒数值,即
−1
ω = +∞
1
Re
0
ωc
0←ω
Kg
1 = G ( jω g ) H ( jω g )
−j
γ > 00
K
g
>1
(b)
6
对于最小相位系统,当幅值裕度 K g > 1 ( G ( jω g ) H ( jω g ) < 1 ), 系统稳定(图b),且Kg值愈大,系统的相对稳定性愈好。如果幅值裕 度 K g < 1 ,( G ( jω g ) H ( jω g ) > 1 ),系统则不稳定( 图b’)。当Kg=1 时,系统的开环频率特性曲线穿过 ( − 1 , j ο )点,临界稳定。可见, 求出系统的幅值裕度 Kg 后,可根据 Kg值的大小分析最小相位系 统的稳定性和稳定程度。
阶系统,用解析法是很困难的。 图解法 以极坐标图和伯德图为基础的图解法,避免了繁锁的
控制系统的相对稳定性

K s ( s 1)( s / 5 1)
解:系统的开环对数频率特性如图所示:
由曲线2和3可知,K =2时,相角裕度和幅值裕度分别是
因为 γ>0,Lg >0,故对应的闭环系统是稳定的。
24 ,
Lg 20log h 10(dB)
K=20时,由曲线1和3看到
24 ,
γ 0 结论: 欲使系统稳定 , 需h 1 L 0 g
γ和h越大,系统稳定程度越 好。 γ=0,h= 1时系统处于临界稳定状 态; γ 0,h 1时系统处于不稳定状态 。
例:某单位反馈系统的开环传递函数为 求相角裕度和幅值裕度,并判断闭环系统的稳定性。
Gk ( s )
Lg 20logh 10(dB)
因为 γ<0,Lg < 0,故对应的闭环系统是不稳定的。
求ωc 和相角裕度γ的另一种方法
由已知的开环传递函数得
A( )
K
1
2
1 ( )2 5
按定义由 A (ω)=1就可以求出ωc来,但系统阶数高时,由A (ω)=1求 ωc是很麻烦的。可以采用近似处理的办法求ωc 。
,(认为 2 1) 1 c2 c c 。 K 2 2。则 A( ) 1 1 ( ) 1 [认为( ) 1] c 。 1 当 。当K=2时, 5K=20时, 5 c c 2 1.414 c 20 4.47 知道了ωc后,便可利用如下公式求相角裕度。 由图可知因1<ωc<5,故可取
§5-5
一、幅值裕度
控制系统的相对稳定性
定义 : 在幅相曲线上,相角等 于-180 时对应幅值的倒数 , 称为 控制系统的幅值裕度。 即 h 1 A ( g )
5.5生态系统的稳定性

稳 定 性 抵抗力
稳定性
恢复力 稳定性
生态系统复杂程度等
三:提高生态系统的稳定性
提高生态系统的稳定性的措施有哪些? 一方面要 控制 对生态系统干扰的程度,对生态系统
的利用应该适度,不应 超过 生态系统的自我调节能力;
适量砍伐 适量放牧 适量捕捞
三:提高生态系统的稳定性
另一方面要对人类利用强度较大的生态系统,应实施 相应的 物质 、能量 投入,保证生态系统内部结构与功 能的协调。
三:提高生态系统的稳定性
人类能否在生物圈之外建造一个适于人类长期生活 的生态系统呢?为什么?
为了做人类离开地球能否 生存的实验,美国花费2亿美 元于1984年建造了一个完全 封闭的生态实验基地。由于该 实验室是模拟生物圈的结构和 功能而建造的,因此叫做“生 物圈Ⅱ号”。这是一个占地 1.3亿平方米 的钢架结构的玻 璃建筑,远远望去仿佛是一个 巨大的温室。
州远郊,从此以后虎丘重现绿水青山。
二:抵抗力稳定性和恢复力稳定性
1.水乡人在河流中淘米洗菜、洗澡洗衣,
河水为何仍能保持清澈? 生态系统抵抗 外界干扰并使自身的结
抵抗力稳定
构与功能保持 原状 的能力。
性
二:抵抗力稳定性和恢复力稳定性
染坊停止排污后,虎丘外围的河流出现 了什么变化,这说明了什么?
生态系统具有在受到外界干扰因素的破
制作:设计并制作生态缸,观察其稳定性
设计要求 生态缸需是
相关分析
封闭 ; 防止外界因素的干扰
生物的种类要 齐全 ; 生物要有很强的生活力 生态缸的材料 透明 ;
生态缸在 光线良好的地方 , 避免阳光直射
实验三控制系统的稳定性分析

实验三控制系统的稳定性分析控制系统的稳定性是指系统在受到外部扰动或内部变化时,是否能保持原有的稳态或稳定的性能。
稳定性是控制系统设计和分析的重要指标之一,它直接影响系统的性能和可靠性。
本实验将介绍控制系统稳定性的分析方法和稳定性判据。
一.控制系统的稳定性分析方法1.传递函数法:传递函数是表示控制系统输入与输出之间关系的数学表达式,通过分析和求解传递函数的特征根,可以判断系统的稳定性。
在传递函数中,特征根的实部和虚部分别代表了系统的衰减和振荡性能,根据特征根的位置可以得到稳定、不稳定和临界稳定等几种情况。
2.极点分布法:极点分布是指控制系统的特征根在复平面上的位置分布。
通过绘制极点图可以直观地判断系统的稳定性。
一般来说,稳定系统的极点都位于左半复平面,而不稳定系统的极点则位于右半复平面。
3. Nyquist稳定性判据:Nyquist稳定性判据是通过绘制Nyquist曲线来判断系统的稳定性。
Nyquist曲线是将控制系统的特征根的位置映射到复平面上形成的闭合曲线,通过分析Nyquist曲线的形状和位置可以判断系统的稳定性。
4. Routh-Hurwitz稳定性判据:Routh-Hurwitz稳定性判据是基于特征多项式的系数和正负性进行判断的方法。
通过构造一个特征方程的判别矩阵,可以判断系统的稳定性。
如果判别矩阵的所有元素都大于0,则系统是稳定的。
二.控制系统的稳定性判据1.传递函数法:通过求解传递函数的特征根,判断特征根的实部和虚部是否满足系统稳定的条件。
特征根的实部必须小于0,而虚部可以等于0。
2.极点分布法:绘制控制系统的极点图,判断极点是否位于左半复平面。
如果所有极点都在左半平面,则系统是稳定的。
3. Nyquist稳定性判据:绘制Nyquist曲线,通过分析曲线的形状和位置来判断系统的稳定性。
如果曲线不经过原点或环绕原点的次数为0,则系统是稳定的。
4. Routh-Hurwitz稳定性判据:构造特征方程的判别矩阵,通过判别矩阵的元素是否都大于0来判断系统的稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
2.幅值裕量(增益裕量) 幅值裕量(增益裕量)
当系统开环幅相曲线与负实轴相角时, )=当系统开环幅相曲线与负实轴相角时,即ϕ(ω)=-1800时对应 的频率,称为相角交界频率 相角交界频率ω 的频率,称为相角交界频率ωg。 在相角交界频率ω 开环幅频特性A( A(ω 的倒数为闭环系 在相角交界频率ωg处,开环幅频特性A(ωg)的倒数为闭环系 统的幅值裕量, 统的幅值裕量,即: 1 1 Kg = = A(ωg ) G ( jωg ) H ( jωg )
2
稳定裕度是衡量系统相稳定性的指标,有相 稳定裕度是衡量系统相对稳定性的指标, 角裕量和幅值裕量. 角裕量和幅值裕量.
1.相角裕量
当系统开环频率特性的幅值为1 当系统开环频率特性的幅值为1时,即A(ω)=︱G(jω)H(jω)︱=1 A(ω ︱ 时的频率,称为开环截止频率或增益交界频率ω 开环截止频率或增益交界频率 时的频率,称为开环截止频率或增益交界频率ωc。 在开环截止频率处的相角ϕ 之差为闭环系统的相 在开环截止频率处的相角ϕ (ωc)与-1800之差为闭环系统的相 角裕量, 角裕量,即:
ϕ (ω c ) = −90° − tan −1 0.2ω c − tan −1 0.05ω c = −104°
γ = 180° + ϕ (ω c ) = 180° − 104° = 76°
ωc ≈ 1
9
幅值裕度: 幅值裕度
ϕ (ω g ) = ∠G ( jω g ) H ( jω g ) = −180°
4
Im
[GH]
L(ω) dB
1/Κg -1 γ ωg ωc
0
ωc
Kg
ω
Re 0
ϕ(ωc)
ϕ (ω)
− 90 − 180 − 270
γ >0
ωg ω
5
Im
[] H G
ω L ()
dB 0 Kg < 0 负幅值裕量
负相角裕量 B
γ
ωc
ω
1 −1
ϕ
Re
ϕω ()
1 Kg
− 90
Gj ω ()
负幅值裕量
7
jω ω
[GH]
jω ω [GH]
-1 ω3 ω2 ω1 0
ω1
ω2
ω3
0
8
例 一单位反馈系统的开环传递函数为 K G(s) = s (1 + 0.2 s )(1 + 0.05s ) 试求K=1时系统的相角裕度和幅值裕度。 时系统的相角裕度和幅值裕度。 试求 时系统的相角裕度和幅值裕度 相角裕度: 根据K=1时的开环传递函数 G ( jωc ) H ( jωc ) = 1 解: 相角裕度 根据 时的开环传递函数 1 G ( jω c ) = jω c (1 + j 0.2ω c )(1 + j 0.05ω c ) 1 = =1 ω c (1 + 0.04ω c2 )(1 + 0.0025ω c2 )
− 180 − 270
ωg
γ <0
ω
负相角裕量
6
3. 关于相角裕度和幅值裕度的几点说明 对于最小相角系统, 对于最小相角系统,只有当相角裕度和幅值裕度都是正 最小相角系统 值时,系统才是稳定的。负的裕度表示系统不稳定。 值时,系统才是稳定的。负的裕度表示系统不稳定。 只用幅值裕度或相角裕度,都不足以说明系统的相对稳 只用幅值裕度或相角裕度, 定性。为了确定系统的相对稳定性, 定性。为了确定系统的相对稳定性,往往需要同时给出这两 个量。 个量。 控制系统的相角裕度和幅值裕度是系统靠近稳定边界 程度的度量。 程度的度量。这两个裕度指标以及开环截止频率可以作为 分析和设计的频域指标。 分析和设计的频域指标。 为了得到满意的性能,要求相角裕度 为了得到满意的性能,要求相角裕度γ=30°~ 60°, ° ° 应当大于6分贝 分贝。 幅值裕度Kg应当大于 分贝。
= 20 + 7 + 1 = 28dB
11
5.5 控制系统的相对稳定性
1
设计控制系统,要求它必须稳定,这是控制系统赖以正常工作 设计控制系统,要求它必须稳定, 的必要条件。除此之外,还要求控制系统具有适当的相对稳定性。 的必要条件。除此之外,还要求控制系统具有适当的相对稳定性。 相对稳定性的概念:基于Nyquist判剧 判剧, 相对稳定性的概念:基于Nyquist判剧,当控制系统的开环传 递函数在s平面右半部无极点时,其开环频率响应G(jω (jω 递函数在s平面右半部无极点时,其开环频率响应G(jω)H (jω)若通 过点( ),则控制系统处于临界稳定边缘 则控制系统处于临界稳定边缘。 过点(-1,j0),则控制系统处于临界稳定边缘。在这种情况下若 控制系统的参数发生漂移, 控制系统的参数发生漂移,便有可能使控制系统的开环频率响应包 围点( ),从而造成控制系统不稳定 因此, 从而造成控制系统不稳定。 围点(-1,j0),从而造成控制系统不稳定。因此,在Nyquist 图 开环频率响应与点( 上,开环频率响应与点( -1,j0 )的接近程度可直接表征控制系 统的稳定程度。 统的稳定程度。 其定性关系是: Nyquist图上 G(jω (jω)不包围点( 图上, ω)不包围点 其定性关系是:在Nyquist图上, G(jω)H (jω)不包围点(-1,j0) 的情况下, G(jω (jω)离点( ω)离点 j0)越远,说明具有P=0的控 的情况下,若 G(jω)H (jω)离点(-1,j0)越远,说明具有P=0的控 制系统的稳定性程度越高;反之,G(jω (jω)越靠近点( ω)越靠近点 制系统的稳定性程度越高;反之,G(jω)H (jω)越靠近点(-1,j0) ,则 上述系统的稳定程度越低。在控制系统稳定的基础上, 上述系统的稳定程度越低。在控制系统稳定的基础上,进一步用以 表征其稳定程度高、低的概念, 表征其稳定程度高、低的概念,便是通常所谓的控制系统的相对稳 定性。 定性。
ϕ (ω g ) = −90° − tan −1 0.2ω g − tan −1 0.05ω g = −180°
−1 −1 即 tan 0.2ω g + tan 0.05ω g = 90° tan θ1 ± tan θ 2 由于 tan(θ1 ± θ 2 ) = 1 ∓ tan θ1 tan θ 2 0.2ω g + 0.05ω g 所以 =∞ 1 − 0.2ω g × 0.05ω g
20 lg G ( jω c ) H ( jω c ) = 0(dB)
γ = 180° + ϕ(ωc )
物理意义:对于闭环稳定系统,如果开环相频特性再滞后 度 物理意义:对于闭环稳定系统,如果开环相频特性再滞后γ度, 则系统将变为临界稳定。 则系统将变为临界稳定。 判定稳定性:为了使最小相位系统稳定,相位裕度 必须为正 必须为正; 判定稳定性:为了使最小相位系统稳定,相位裕度γ必须为正; 若γ<0,闭环系统不稳定;若γ=0 ,闭环系统处 ,闭环系统不稳定; 于临界稳定状态。 于临界稳定状态。
K g (分贝) = −20 lg A(ωg ) = −20lg G( jωg ) H ( jωg )(dB)
物理意义:对于闭环稳定系统,如果开环幅频特性再增大 倍 物理意义:对于闭环稳定系统,如果开环幅频特性再增大h倍, 则系统将变为临界稳定。 则系统将变为临界稳定。 判定稳定性:为了使最小相位系统稳定,必须 判定稳定性:为了使最小相位系统稳定,必须Kg>1;若Kg<1, ; , 闭环系统不稳定; 闭环系统不稳定;若Kg=1 ,闭环系统处于临界稳 定状态。 定状态。
1 − 0.2ω g × 0.05ω g = 0
ω g = 10
10
在ωg处的开环对数幅值为
K g = −20 lg G ( jωg ) H ( jωg )
= −20 lg 1 jω g (1 + j 0.2ω g )(1 + j 0.05ω g )
= 20 lg 10 + 20 lg 1 + (0.2 × 10) 2 + 20 lg 1 + (0.05 × 10) 2