后继函数与极限环的稳定性
非线性振动学习报告

《非线性振动》学习报告2010年3月至6月在北京学习期间,中科院并没有开设相同或者类似的课程,所以我只能以自学的方式完成课程。
我每周的学习时间保持在3小时左右,使用的课本是《非线性振动》(刘延柱陈立群编),根据绪论的内容,以及今后可能遇到的实际问题,我重点阅读的章节为前四章。
本文内容,尤其是前几章的内容,主要以我在看书时的勾画和笔记。
本文全部由我自己输入,在完成过程中,没有十分注意排版的问题,所以板式可能比较混乱希望老师谅解。
第一章非线性振动的定性分析方法1.1 稳定性理论的基本概念特定的运动成为系统的未受干扰的运动,简称为稳态运动,而受扰运动则是偏离稳态运动的系统的运动。
李雅普诺夫关于稳定性的定义有:稳定的、渐进稳定、不稳定李雅普诺夫直接方法的理论基础由三个定理组成:(1)若能够早可谓征订函数V(x),使得沿扰动方程解曲线计算的全导数V为半负定或等于零,则系统的未扰运动稳定。
(2)若能构造可微正定函数V(x),使得沿扰动方程解曲线计算的全导数V为负定,则系统的未扰运动渐进稳定。
(3)若能构造可微正定、半正定函数V(x),使得沿扰动方程解曲线计算的全导数V为正定,则系统的未扰运动不稳定。
定理:若保守系统的势能在平衡状态处有孤立极小值,则平衡状态稳定。
对于复杂的非线性系统,可以以近似的线性系统代替可以根据一次近似方程的稳定性,判断原方程的稳定性:(1)若一次方程的所有本征实部均为负,则原方程的零解渐进稳定(2)若一次近似方程至少有一本征实部为正,则原方程的零解不稳定(3)若一次近似方程存在零实部的本征值,其余根的实部为负,则不能判断原方程的零解的稳定性1.2相平面、相轨迹和奇点与系统的运动状态一一对应的像平面上的点称为系统的相点,相点的移动轨迹称为相轨迹。
像平面内能使方程右边分子分母同时为零的特殊点称为相轨迹的奇点。
保守系统的相轨迹有以下特点:(1)相轨迹曲线相对横坐标对称;(2)势能曲线z=V(x)与横坐标轴的平行线z=E交点的横坐标C1,C2,C3,处,相轨迹与横坐标轴相交;(3)横坐标轴上与势能曲线的驻点相对应的点S1,S2,S3,为奇点,因为他们满足几点的定义;(4)在势能取极小值处,设E>V(S1),则在x= S1的某个小领域内都有E大于等于V(x)。
常微分方程定性与稳定性方法

谢谢观看
目录分析
第二部分是主体部分,详细介绍了常微分方程定性与稳定性的各种方法。其 中包括了稳定性理论、线性化与中心流形方法、Lyapunov第二方法、PoincaréBendixson定理等。这些方法都是解决常微分方程定性稳定性问题的关键工具, 通过学习这些方法,读者可以更好地理解和应用常微分方程。
目录分析
目录分析
目录分析
《常微分方程定性与稳定性方法》是一本关于常微分方程的学术著作,其目 录作为书籍内容的指引,具有重要意义。通过对目录的深入分析,我们可以了解 这本书的主要内容、结构以及编者的思路。
目录分析
从目录的结构来看,这本书大致可以分为三个部分。第一部分是引言,主要 介绍了常微分方程的基本概念、研究背景以及本书的目的和内容概述。这一部分 对于读者理解全书内容起到了很好的引导作用。
阅读感受
这本书从常微分方程的基本概念入手,逐步深入到其定性分析和稳定性方法。 让我印象深刻的是,作者不仅仅是在讲解理论知识,更是将理论与实践紧密结合。 例如,书中提到了极限环的概念,这是我之前未曾深入了解的领域。通过书中的 解释,我了解到极限环在很多实际问题中都有着广泛的应用,如生态系统的种群 动态、电路的振荡等。
内容摘要
还通过实例阐述了线性化方法在近似求解非线性问题中的应用。
Lyapunov第二方法涉及了中心流形定理和分岔理论。这一章通过深入浅出的方式,介绍了中心 流形定理的基本概念和计算方法,以及分岔理论的分类和应用。还结合实例探讨了非线性系统在 分岔点附近的动态行为。
本书的最后两章分别介绍了时滞微分方程的稳定性和混沌理论的相关内容。时滞微分方程在现代 科技领域中有着广泛的应用,如生态学、电路系统和控制系统等。这一章重点讨论了时滞微分方 程的稳定性条件和计算方法,以及与连续系统和离散系统的关系。也通过实例探讨了混沌理论在 时滞微分方程中的应用和意义。
快速学习奈氏图判断稳定性
如图4—42所示,(1) 0 ,s沿负虚轴变化;(2)0 ,s沿
正虚轴变化;(3)s lim Re j ,s沿以原点为圆心,半径为无穷大的右半圆
弧变化,其中 ,对R应 由 顺时针绕。
j
(1)当s在S平面负虚轴上变化时,s j ,
F (s1 )
(1 j2)2 (1 j2) 1 (1 j2)(1 j2 1)
0.95
j0.15
如图4—37所示,在 F (s) 平面上有点 F(s1) 0.95 j0.15 与S平面上的点s1 对应,
F (s1 )就叫做 s1 1 j2在 F (s)平面上的映射点。
如图4-43中的曲线(2),这正是系统的开环频率特性。由于正负虚轴在S平面 上以实轴为对称,它们在GH平面上的映射曲线(1)、(2)两部分也对称于实轴。
当s 过平面原点时,s j ,它在GH平面上的映射为
G(s)H (s) G( j)H ( j) K
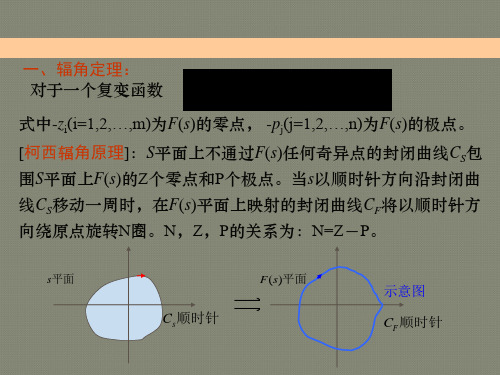
其零、极点在S平面上的分布如图 4—39 所示,在 S平面上作一封闭曲线s , s不通过上述零、极点,在封闭曲线s 上任取一点S1 , 其对应的辅助函数F(s1)
的幅角应为
3
3
F(s1) (s1 z j ) (s1 pi )
j 1
i1
(4-111)
当解析点s1沿封闭曲线s按顺时针方向旋转一周后再回到 s1 点,从图中可以发现,
点,在 F (s)平面上必有一点(称为映射点)与之对应。 例如,当系统的开环传递函数为
G(s)H (s) 1 s(s 1)
则其辅助函数是 F(s) 1 G(s)H (s) s2 s 1 s(s 1)
《高等数学(文科二)》课程考核大纲 - 数学系

《高等数学》课程考核大纲(文科二) 课程编号:052707 课程性质:必修 总学时: 64学时 总学分:4学分 开课学期: 第1学期 大纲执笔人: 项明寅 参加人: 高等数学课任老师 大纲审核人:胡跃进 编写时间:2007年2月 适用专业:文科各类专业(一)、考核大纲的编写说明 高等数学是我院理工科及经济管理等学科学生必修的基础课程之一,是培养学生运算能力、抽象概括问题的能力、逻辑推理能力、综合运用所学知识分析和解决问题能力的课程,是学生学习后继课程和进一步获得近代科学技术知识的必备基础。
本课程的考试目标是考查学生的高等数学的基本概念、基本理论、基本方法和常用的运算技能,并以此检测学生分析问题、解决问题的能力。
本大纲对内容的要求由低到高。
对概念和理论分为"了解、理解"两个层次,对方法和运算分为"会、掌握、熟练掌握"三个层次。
本考纲面向的对象为我院其它文科各专业:包括文学院、外语系、体育系、教育系和艺术系等专业的大学本科一年级学生.(二)、考核内容与考核要求 第一篇 函数、极限、连续1、考核内容 1)函数的概念,函数的表示法.函数的有界性、单调性、周期性和奇偶性.复合函数、反函数、隐函数和分段函数的概念.基本初等函数的性质及其图形,初等函数的概念.会建立简单应用问题中的函数关系式. 2)数列极限和函数极限(包括左、右极限)的概念.理解无穷小的概念和基本性质.极限的性质与四则运算法则,两个重要极限.函数连续性(含左连续与右连续),判别函数间断点的类型.了解连续函数的性质和初等函数的连续性,了解闭区间上连续函数的性质(有界性、最大值和最小值定理、介值定理)及其简单应用.2、考核要求 1)理解函数的概念,掌握函数的表示法,并会建立简单应用问题中的函数关系. 2)了解函数的有界性、单调性、周期性和奇偶性. 3)理解复合函数、和分段函数的概念.了解反函数及隐函数的概念. 4)掌握基本初等函数的性质及其图形,了解初等函数的概念. 5)了解数列极限和函数极限(包括左极限与右极限)的概念. 6)理解无穷小的概念和基本性质.掌握无穷小的比较方法.了解无穷大的概念及其与无穷小的关系. 7)了解极限的性质与极限存在的两个准则,掌握极限的四则运算法则,会应用两个重要极限. 8)理解函数连续性的概念(含左连续与右连续),会判别函数间断点的类型. 9)了解连续函数的性质和初等函数的连续性,了解闭区间上连续函数的性质(有界性、最大值和最小值定理、介值定理)及其简单应用. 第二篇 一元函数微分学1、考核内容 1)导数的概念,可导性与连续性关系,导数的几何意义.基本初等函数的导数公式、导数的四则运算法则及复合函数的求导法则;反函数与隐函数求导法.高阶导数的概念,解微分的概念与计算. 2)罗尔定理和拉格朗日中值定理的几何意义及简单应用.洛必达法.函数单调性与凸性的几何意义与判别,极值、最大值和最小值的求法和应用.函数作图的基本步骤和方法,作简单函数的图形.2、考核要求 1)理解导数的概念及可导性与连续性之间的关系,了解导数的几何意义与经济意义(含边际与弹性的概念).会求平面曲线的切线方程和法线方程. 2)掌握基本初等函数的导数公式、导数的四则运算法则及复合函数的求导法则,掌握反函数与隐函数求导法以及对数求导法. 3)了解高阶导数的概念,会求简单函数的高阶导数. 4)了解微分的概念,导数与微分之间的关系,以及一阶微分形式的不变性,会求函数的微分. 5)理解罗尔(Rolle)定理、拉格朗日( Lagrange)中值定理、了解柯西(Cauchy)中值定理,掌握这三个定理的简单应用. 6)会用洛必达法则求极限. 7)掌握函数单调性的判别方法,了解函数极值的概念,掌握函数极值、最大值和最小值的求法及其应用. 8)会用导数判断函数图形的凹凸性,会求函数图形的拐点和渐近线. 9)会描述简单函数的图形. 第三篇 一元函数的积分学1、考核内容 定积分的概念和基本性质,原函数与不定积分的概念和基本性质,不定积分的基本计算方法,换元积分法和分部积分法.牛顿--莱布尼茨公式,定积分的换元积分法和分部积分法.利用定积分计算简单的平面图形的面积和旋转体的体积.2、考核要求 1)理解原函数与不定积分的概念,掌握不定积分的基本性质和基本积分公式,掌握计算不定积分的换元积分法和分部积分法. 2)了解定积分的概念和基本性质,了解定积分中值定理,理解积分上限的函数并会求它的导数,掌握牛顿一莱布尼茨公式,以及定积分的换元积分法和分部积分法. 3)会利用定积分计算平面图形的面积和旋转体的体积及函数的平均值,会利用定积分求解简单的经济应用问题. 4)了解广义积分的概念,会计算广义积分. 第四篇 常微分方程1、考核内容 常微分方程的基本概念 变量可分离的微分方程 齐次微分方程 一阶线性微分方程 微分方程的简单应用2、考核要求 1)了解微分方程及其阶、解、通解、初始条件和特解等概念. 2)掌握变量可分离的微分方程、齐次微分方程和一阶线性微分方程的求解方法. 3)会应用微分方程求解简单的经济应用问题. 第五篇 线性代数1、考核内容 二阶和三阶行列式的概念和基本性质 矩阵的概念 矩阵的线性运算 乘法运算 方阵的行列式 逆矩阵,矩阵可逆的条件 逆矩阵.线性方程组的矩阵表示,有解和无解概念以及判定方法 克莱姆法则 齐次线性方程组的基础解系和通解的求法 非齐次线性方程解法.2、考核要求 1)会应用行列式的定义和性质计算行列式. 2)理解矩阵的概念,知道单位矩阵、对角矩阵,伴随矩阵,可逆矩阵,转置矩阵.矩阵的线性运算、乘法运算,方阵的行列式.逆矩阵,矩阵可逆的条件,会求逆矩阵 3)会用克莱姆法则解三元线性方程组.齐次线性方程组的基础解系和通解的求法. 4)掌握非齐次线性方程解法.(三)、命题要求与覆盖面 1、命题内容要求:以一学期教学的全部内容和与本课程有关的理论知识,技能和科研成果,并要体现素质教育的要求,对那些指定阅读的书目中相关的考核内容以教材为主。
《高等数学》课程标准

《高等数学》课程标准第一部分课程概述一、课程性质和作用高等数学是高职高专各专业重要的基础课程,其教学内容与后继专业课教学内容有着紧密的联系,它影响到学生后继专业课程的学习,影响到学生专业素质的提高。
它具有综合性高、逻辑性强和应用性广等特点,对于理解专业知识、培养思维能力有着十分重要的意义,是学生全面发展和终身发展的基础。
通过本课程的教学,首先让学生掌握高等数学的基本理论、技巧和思想方法,为后设专业课程提供必要的数学基础知识和科学的思想方法。
其次,逐步培养了学生具有一定的抽象概括问题能力,一定的逻辑推理能力,比较熟练的运算能力,综合分析并解决实际问题的能力等。
最后还充分调动学生已有的数学知识为专业目标服务,培养学生运用数学知识分析处理实际专业问题的数学应用能力和综合素质,以满足后继专业课程对数学知识需要,培养出能够满足工作需要的,具有良好综合素质的应用型人才。
二、课程基本理念高等数学作为高职高专各专业公共基础课,在课程设计中,我们对照教育部最新制定的《高职高专教育高等数学课程教学基本要求》,致力于实现高职高专院校的培养目标,着眼于学生的整体素质的提高,促进学生全面、持续、和谐发展。
课程内容不仅反映出专业的需要、数学学科的特征,同时符合学生的认知规律;不仅包括数学的结论,而且包括数学结论的形成过程和数学思想方法。
同时,课程设计努力满足学生对未来的学习、工作和生活的需要,使学生通过本课程的学习,在抽象思维、推理能力、应用意识、情感、态度与价值观等诸多方面均有大的发展。
三、课程标准设计思路及依据(一)教学内容《标准》安排了《一元函数微积分》的基本内容。
课程内容的学习,强调学生的数学学习活动,发展学生的应用意识。
(二)目标根据教育部制定的《高职高专教育高等数学课程基本要求》和《高职高专教育人才培养目标及规格》,《标准》明确了高等数学课程的总目标,其子目标从知识、能力、情感等三个方面作出了进一步阐述。
(三)实施建议《标准》针对教学、评价、教材编写、教案编写、课程资源的利用与开发提出了建议,以保证《标准》的顺利实施。
奈奎斯特稳定判据
N=F(s)的右半零点数-F(s)的右半极点数 =闭环系统右半极点数-开环系统右半极点数
当已知开环右半极点数时,便可由N判断闭环右极点数。
这里需要解决两个问题:
1、如何构造一个能够包围整个s右半平面的封闭曲线,并且它是 满足柯西辐角条件的?
⒋ 围线CS包围Z个零点和P个极点 由上述讨论显然可知,当变点s沿CS顺时针绕行一周时,CF应顺 时针包围原点Z-P次。亦即CF顺时针包围原点次数N=Z-P。
这就是所谓辐角原理。
A H
G
2
F
1.5
s平面
1
B
C
0.5
E
2 1 D
0 -0.5
HG A
D
E
-1
C
F
CS顺时针
-1.5
-2
B
-1 -0.5 0 0.5 1 1.5 2 2.5 3
二、奈奎斯特稳定判据:
奈奎斯特当年就是巧妙地应用了辐角原理得到了奈奎斯特 稳定判据。设系统结构图如图所示
G k(s)G (s)H(s)
R(s)
(s) G(s) 1G(s)H(s)
令: G(s)M1(s),H(s)M2(s)
N1(s)
N2(s)
则开环传递函数为:Gk(s)M N11((ss))M N22((ss)) 闭环传递函数为:(s) M1N2
) (s1pj
j1
)
s1pj ej(s1pj)
s1 pj
j1
j1
向量的幅值为
m
K s1 zi
F ( s1 )
高等数学例题

高等数学(下)例题《高等数学》教学大纲一、课程目标1、课程性质《高等数学》是工科各专业的核心课程。
在工程、化学、物理、机械、经济等专业的众多课程都需要以数学为基础,因此,掌握《高等数学》的有关知识,把握微积分的基本思想和基本方法,对顺利完成后继课程的学习是非常必要的。
本课程也是培养学生获取知识能力、应用知识能力及创新能力,提高学生抽象能力、逻辑思维能力与数学素质的一个重要的教学环节。
2、教学方法以课堂讲授为主,习题课及课堂练习为辅。
应用多媒体辅助教学。
3、课程学习目标和基本要求(1)通过学习学生要掌握微积分的基本思想和基本方法,掌握数列的极限、函数的极限与连续,一元函数的微分学,一元函数的不定积分与定积分的计算。
线性微分方程的解法。
向量代数、直线、平面、及空间曲线与曲面方程。
多元函数的连续与极限,偏导数及微分,复合函数的求导法则,隐函数的求导公式。
重积分、曲线积分与曲面积分的计算。
幂级数与傅里叶级数。
(2)通过学习,培养学生具有抽象思维、逻辑推理的理性思维能力,综合运用所学的数学知识分析问题、解决问题的能力,为学习后继课程奠定必要的数学基础。
4、课程学时:180学时5、课程学分:10学分6、课程类型:必修课7、先修课程:初等数学8、考试(考核)方式:考试9、适用专业:全院理工类各专业二、课程结构1、极限与连续(20学时)知识点:极限,两个重要极限,无穷小的比较,连续性与间断点,闭区间上连续函数的最大(小)值定理与介值定理,函数的概念与复合函数。
无穷大与无穷小,极限的运算,初等函数,映射,基本初等函数,初等函数。
重点:数列极限与函数极限的概念,极限存在准则与两个重要极限,无穷小的比较,函数连续性与间断点,闭区间上连续函数的最大(小)值定理与介值定理,函数的概念与复合函数。
难点:极限存在准则,闭区间上连续函数的性质。
2、一元函数微分学(24学时)知识点:导数的定义,相关变化率,复合函数求导,隐函数、参数方程求导,相关变化率,函数微分,拉格朗日中值定理,罗必塔法则,函数单调性与凹凸判定法,函数极值与最值问题。
非性线性连续系统李雅普诺夫第二方法稳定性分析
非线性连续系统Lyapunov第二方法稳定性分析目录1、前言 (7)1.1发展状况 (7)1.2 Lyapunov稳定性实际应用 (7)1.3 Lyapunov应用研究现状 (9)1.4 Lyapunov关于稳定性定义 (10)1.5 Lyapunov第一方法 (11)2 、非线性连续系统Lyapunov第二方法稳定性分析 (13)2.1 引言 (13)2.2 问题描述 (13)2.3 Lyapunov第二方法直观解释 (13)2.4 标量函数的符号性质 (14)2.5 Lyapunov第二方法相关定理 (14)2.6非线性连续系统Lyapunov第二方法稳定性分析 (16)3、仿真示例 (20)4、总结与展望 (23)致谢 (24)参考文献 (25)摘要对非线性系统和时变系统,状态方程的求解常常是很困难的,因此Lyapunov第二方法就显示出很大的优越性。
Lyapunov第二方法可用于任意阶的系统,运用这一方法可以不必求解系统状态方程而直接判定稳定性。
Lyapunov第二方法的局限性在于,运用时需要系统的稳定性问题。
现在,随着计算机技术的发展,借助数字计算机不仅可以找到所需要的Lyapunov函数,而且还能确定系统的稳定区域。
本文主要通过分析李雅普诺夫当前发展状况和在实际中的应用,进而研究非线性连续系统Lyapunov第二方法的稳定性分析。
关键字:非线性连续系统 Lyapunov第二方法稳定性AbstractDirectly determine the stability of system state equation. The limitations of lyapunov second method is that the need when using the stability of the system problem. Now, with the development of computer technology, with the aid of a digital computer can find not only the need of lyapunov function, but also can determine the stability regions of the system. In this paper, by analyzing the lyapunov's current development status and application in the actual, and study the nonlinear stability analysis of continuous system lyapunov second method.Keywords:Stability of nonlinear; continuous system; Lyapunov second method1 前言(Introduction)1.1 Lyapunov发展状况Lyapunov稳定性理论能同时适用于分析定常系统和时变系统的稳定性、线性系统和非线性系统、,是更为一般的稳定性分析方法。
自动控制原理-5.4奈氏判据
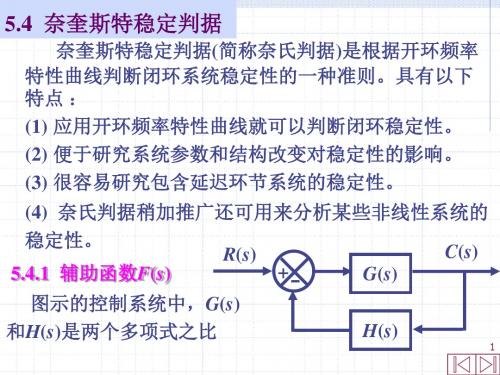
稳定性。
5.4.1 辅助函数F(s)
R(s)
+﹣
图示的控制系统中,G(s)
C(s) G(s)
和H(s)是两个多项式之比
H(s)
1
G(s) M1(s)
N 开环传递函数为:
1
(
s)
H(s) M2(s) N2(s)
Gk (s) G(s)H(s) 闭环传递函数为:
M1(s)M2(s) N1(s)N2(s)
(1)0型系统(开环没有串联积分 0 环节的系统)
s为包s围平虚面轴s 和整个右映半射平面。F(s)
正虚轴 j (:0)
F(j) ( : 0)
s
负虚轴 j (: 0)
F(j) ( : 0)
半径的半圆
( 1, j0)点
5
F(j)和G(j)H(j)只相差常数1。 F(j)包围原点就 是G(j)H(j)包围(-1,j0)点。
R=2 z = p R = 2
kT1T2
T1 T2
1
∴ 闭环系统是不稳定的 。
当 kT1T2 > 1 T1 T2
R=0
z = p R= 0
=0+
∴ 闭环系统是稳定的 。
Im
0
Re
增补线
16
(3) 由奈氏判据判稳的实际方法
用奈氏判据判断系统稳定性时,一般只须绘制从
j 1
F(s)曲线从B点开始,绕原点顺时针方向转了一圈。 4
幅角原理:如果封闭曲线内有Z个F(s)的零点, P个F(s)
的极点 ,则s 沿封闭曲线s 顺时针方向转一圈时,在F(s)
平面上,曲线F(s)绕其原点逆时针转过的圈数R为P和Z之
119. 函数的稳定性如何分析?

119. 函数的稳定性如何分析?119、函数的稳定性如何分析?在数学的广袤领域中,函数是一个极其重要的概念。
而对于函数的研究,其稳定性是一个关键的方面。
那么,究竟如何去分析函数的稳定性呢?要理解函数的稳定性,首先得明确什么是稳定性。
简单来说,函数的稳定性就是指函数在受到一定的“干扰”或“变化”时,其性质是否能够保持相对的不变或者在一定的范围内波动。
让我们从函数的定义说起。
函数通常被描述为一种输入和输出之间的关系。
给定一个输入值,通过函数的规则,就能够确定唯一的输出值。
然而,当输入值发生微小的变化时,输出值的变化情况就与函数的稳定性密切相关。
一种常见的分析函数稳定性的方法是通过极限的概念。
当自变量趋近于某个特定的值时,如果函数的极限存在,那么这在一定程度上反映了函数在该点附近的稳定性。
例如,对于连续函数,其在某一点的极限值等于该点的函数值,这就表明函数在该点附近是相对稳定的。
导数也是分析函数稳定性的有力工具。
函数的导数反映了函数的变化率。
如果函数在某个区间内的导数始终为正,那么函数在该区间上是单调递增的;反之,如果导数始终为负,则函数单调递减。
而当导数的值接近于零的时候,函数的变化相对平缓,稳定性相对较高。
以简单的一次函数 y = mx + b 为例,如果 m > 0,函数单调递增;m < 0,函数单调递减。
m 的绝对值越大,函数的变化越剧烈,稳定性相对较差;m 的绝对值越小,函数的变化越平缓,稳定性相对较好。
对于二次函数 y = ax²+ bx + c ,其导数为 y' = 2ax + b 。
当 a >0 时,函数图像开口向上,在对称轴左侧单调递减,右侧单调递增;当a < 0 时,函数图像开口向下,在对称轴左侧单调递增,右侧单调递减。
再来看更复杂一些的函数,比如指数函数和对数函数。
指数函数 y= a^x (a > 0 且a ≠ 1),当 a > 1 时,函数单调递增,增长速度越来越快;当 0 < a < 1 时,函数单调递减,衰减速度越来越慢。
线性系统的稳定性

(2)V (x,t)正定有界,即存在两个连续的非减标量函
数α ( x ), β ( x ),其中α (0) = 0,β (0) = 0,使对一切
t ≥ t0, x ≠ 0成立
0 < α ( x ) ≤ V (x,t) ≤ β ( x )
S(ε)
x
x0
S(δ )
x(t)
x0
S(δ )
H (ε )
t
T
(a)
(b)
图4-2 渐近稳定的平衡状态
定义 4-3: 平衡状态xc是指数渐近稳定
存在υ > 0, ∀ε > 0, ∃δ (ε ) > 0使当
x0 − xc < δ (ε ) 时,有 x(t; x0 , t0 ) − xc ε < e−υ (t−t0 )
可见,即使初始值很大地偏离了平衡状态,系统最终 将收敛。
例 4-1
x
x& = −x(1− x)
该方程的解为
1
x(t)
=
1
−
x0e−t x0 + x0e−t
o
t
两个平衡状态xc=0, xc=1。
ln x0 x0 − 1
图4-3 非线性系统的解
定义4-5: 不稳定
无论取多大的有界ε > 0, 不存在δ(ε ,t0)> 0,满足
⎧⎪ ⎨ ⎪⎩
x&1 x&2
= =
x2 − x1(x12 + −x1 − x2 (x12
x22 ) + x22
)
x1=x2=0是系统的唯一的平衡状态。
希尔伯特第十六问题(2)
练习
证明Vanderpol方程 方程 证明
x' = y ' y = − x + µ (1 − x 2 ) y
存在稳定的极限环。 存在稳定的极限环。
方法:根据定理4,构造区域满足条件,得 在该区域内至少有一个稳定的极限环。
希尔伯特第十六问题问题旨在研究由多项式 定义出的拓扑结构,及极限环的位置及最大 个数,要解决这个问题,我们就要了解极限 环的基本问题,包括极限环的存在性,个数 及位置的估计等。而学习极限环又需要知道 奇点附近轨线的分布的基本知识,因此这两 部分的基本知识为此问题的学习做好铺垫。 本节课也突出了常微分方程几何理论在推动 数学学科发展中的重要作用。
为后继函数。 为后继函数。
后继函数的性质与极限环存在、 后继函数的性质与极限环存在、稳定的关系
⑴ 若 的不动点: s0 是后继函数 f ( s) 的不动点 f (s0 ) = s0 即
则过以
s0 为坐标的点
则
是一个闭轨。 M 0 的轨线 Γ 0 是一个闭轨。 即
d ( s0 ) ≡ 0
d ( s ) 的零点: 的零点:
Γ
,由格林公式有 由格林公式有
∫
Γ
Pdy − Qdx
~
Γ
所围之区域, 所围之区域,于是 D
~
⊂D
Γ
是系统( )之轨线, 是系统(1)之轨线,所以上式右端曲线积分之被积函数
Pdy − Qdx = ( pq − qp )dt = 0
从而曲线积分为零。由定理假设,左端重积分不为零。矛盾。 从而曲线积分为零。由定理假设,左端重积分不为零。矛盾。
)>0
即
f ′( s0 ) > 1
是不稳定极限环。 Γ 0 是不稳定极限环。
希尔伯特第十六问题(二)
例 证明Vanderpol方程⑵
x' y
y'
x
(1
x2 ) y
存在稳定的极限环。
• 方法:根据定理4,构造区域满足条件,得到在该 区域内至少有一个稳定的极限环。
(三)极限集的性质:
• 轨线(t, x) 的 极限点: 若存在序列 tn , n , 使得 (tn , x) x, n 则称 x 为轨线 (t, x) 的 极限点
轨线趋向无穷 | (t, x) |
x 性质4 ( ) 极限集只有唯一一个点 的充要条件是
lim (t, x) x( lim (t, x) x).
t+
t
性质5 有界区域内的正半(负半)轨线的极限集是连 通的。 性质6 A是闭的不变集(特别地,A是一个极限集),
若 x0 A, 则 L (x), L (x) A.
Lyapunov第二方法
x P(x, y, )
考虑系统
y
Q(x,
y,
)
,其中
P,Q是(x, y, )的函数,
设参数 0时, 系统以(0,0)为中心型稳定(不稳定)焦点;
参数 0时, 系统以(0,0)为中心型不稳定(稳定)焦点;
则对充分小的 0时, 系统在点(0,0)附近至少有一个稳定(不稳定)
轨线
(t, x)
的 极限点:若存在序列 tn , n ,使得
(tn, x) x, n 则称 x 为轨线 (t, x) 的 极限点
称 (t, x) 的所有 极限点的集合为 (t, x) 的 极限集,记作 L (x)
类此地可以定义 极限集 L (x)
关于因果稳定系统的系统函数Hz收敛域的讨论
【基础・应用】关于因果稳定系统的系统函数H (z )收敛域的讨论①郭 红 霞(武警工程学院基础部,陕西西安710086)【摘 要】 本文指出了《数字信号处理》教材中关于因果稳定系统的系统函数H (z )收敛域所存在的不足,并就此问题进行了分析和讨论。
最后对因果稳定系统的系统函数H (z )的收敛域给出了正确的表示。
【关键词】 系统函数;Z 变换;收敛域1 问题的提出“系统函数”在工程技术领域的研究中是一个十分重要的概念。
无论对于模拟系统(或连续系统)还是数字系统(或离散系统),系统函数表征了系统本身的传输特性,它是描述系统、设计系统和分析系统在不同输入信号激励下输出响应的最重要的特征参数。
然而,对于同一个系统函数H (z ),收敛域不同,它们所代表的系统就会完全不同。
因此,系统函数的收敛域对于确定系统的性质又是很重要的。
本文就常见的《数字信号处理》教材[1,2]中,讨论因果稳定系统系统函数的收敛域时所出现的一个纰漏,即文献[1,2]等教材中称“因果稳定系统的系统函数H (z )的收敛域为1≤|z|≤∞”,作者认为此结论不全面,现提出并进行分析讨论。
2 分析与讨论2.1 离散系统的系统函数和频率响应我们知道,一个离散线性移不变系统的输出y (n ),可用它的单位冲激响应h (n )和它的输入x (n )的卷积表示,即y (n )=x (n )3h (n )(1)其中3表示卷积运算,对(1)式两边取Z 变换,得Y (z )=X (z )・H (z )(2)则H (z )=Y (z )X (z )(3)(3)式H (z )就定义为离散线性移不变系统的系统函数。
它是系统的单位冲激响应序列的Z 变换,即H (z )=Z[h (n )]=∑∞n =-∞h (n )z -n(4a )h (n )=Z -1[H (z )]=12πjιc H (z )z n -1dz (4b )其中c 是H (z )的收敛域内环绕原点的一条逆时针闭合单围线。
哥萨诺夫定理

哥萨诺夫定理哥萨诺夫定理是数学中的一个重要定理,它被广泛应用于各个领域,例如控制理论、信号处理、通信系统等等。
它的基本思想是通过对一个系统的极点和零点的分析来判断系统是否稳定。
本文将对哥萨诺夫定理的基本概念、推导过程、应用以及局限性进行讲解。
哥萨诺夫定理是一种判断线性时不变系统稳定性的方法,它可以通过分析系统的传递函数来得到。
在这里,我们需要了解两个概念:极点和零点。
极点是传递函数的分母为0的点,而零点是传递函数的分子为0的点。
一个系统的稳定性取决于它的极点和零点的分布情况。
哥萨诺夫定理的推导过程哥萨诺夫定理的推导过程比较复杂,这里只简单介绍一下。
首先,我们需要将传递函数的极点和零点分别表示为实部和虚部的形式。
然后,我们将这些实部和虚部画在复平面上,得到一个极点图和一个零点图。
接下来,我们通过画出一系列反馈回路的开环增益K对应的极点图和零点图,来得到一个稳定性图,即哥萨诺夫图。
最后,我们通过哥萨诺夫图来判断系统是否稳定。
哥萨诺夫定理的应用哥萨诺夫定理在控制理论、信号处理、通信系统等领域都有广泛的应用。
在控制理论中,它可以用来判断闭环系统的稳定性,以及通过设计适当的控制器来保证系统的稳定性。
在信号处理中,它可以用来分析滤波器的性能,以及通过设计合适的滤波器来满足特定的信号处理要求。
在通信系统中,它可以用来分析信道的稳定性,以及通过设计合适的调制、解调、编码和解码等电路来提高系统的性能。
哥萨诺夫定理的局限性哥萨诺夫定理虽然在许多领域中都有广泛的应用,但它也存在一些局限性。
首先,它仅适用于线性时不变系统,对于非线性系统和时变系统无法使用。
其次,它只能判断系统是否稳定,而不能给出具体的稳定区域和稳定极点的位置。
最后,它对于传递函数的精确性要求较高,因此在实际应用中需要进行实验验证和误差分析。
哥萨诺夫定理是一个非常重要的数学定理,在各个领域都有广泛的应用。
虽然它存在一些局限性,但是在许多实际问题中仍然能够提供有用的参考和指导。
两个重要极限教案(修改稿)
教师:多容
师生双边活动
复习导入
新授
1、说说当 时,函数 的极限的定义。
如果当 无限接近于定值 时,函数 无限接近于一个确定的常数 ,那么 称为函数 当 时的极限,记作 。
2、 的充要条件是什么?
=
3、说出函数极限的四则运算法则。
4、求下列函数的极限:① ;②
教材分析
《两个重要极限》是在学生学习了数列的极限、函数的极限以及函数极限的四则运算法则的基础上进行研究的,它是解决极限计算问题的一个有效工具,也是今后研究初等函数求导公式的一个工具,所以两个重要极限是后继学习的重要基础。
学情分析
一方面,学生已经学习了函数的极限以及函数极限的运算法则,会用因式分解约去非零因子、有理化分子或分母这两种方法计算“ 型”函数的极限,具备了接受新知识的基础;另一方面,学生理性思维能力相对较弱,对函数极限概念的理解还比较浅显,运用极限思维解决问题的能力有限。
教学目标
知识与技能:让学生了解公式 的证明过程,正确理解公式,知道公式应用的条件,熟练运用公式及其变形式解决有关函数极限的计算。
过程与方法:通过教师引导,学生观察、实验、猜想、分析讨论和练习,培养学生观察、归纳、举一反三的能力,进一步认识换元法、转化思想、数型结合思想在数学解题中的重要作用。
情感态度与价值观:通过对这一重要极限公式的研究,进一步认识数学的美,激发学生的学习兴趣;养成细心观察、认真分析、善于总结的良好思维品质。
强调:①极限中函数 的分子分母都是当 时的无穷小。
②这里的自变量 是用弧度度量的,以后引用这个极限时必须用弧度作单位。
③在利用这个极限求较复杂函数的极限时,必须注意所有含有自变量的表达形式应一致。
④
四、公式的应用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
后继函数与极限环的稳定性后继函数与极限环的稳定性1 Poineare 映射与后继函数设平面系统()(),,,k dxP x y dtP Q C dy Q x y dt⎧=⎪⎪∈⎨⎪=⎪⎩(1)k 为足够大的正数,并设Γ是系统(1)的一条闭轨线,其方程为()(),x x t y y t ==()x t 与()y t 是周期为T 的函数.在Γ上任意一点0P 作Γ的外法向量,在Γ的足够小的邻域(),δΓU 内的法线短设为AB ,选取AB 上任意一点0Q ,B 并设从0P 到0Q 的有限距离为0n ,由解对初值的连续依赖性可知,从0Q 出发的轨线环绕闭轨一周后,必将再次与法线短AB 相交于1Q 点。
记0P 与1Q 的有向距离为n ,于是n 将是0n 的函数,并记为()0n n n =,如图(1)所示。
A图1定义1 称1Q 为0Q 的后继点; ()0n n 为后继函数,有时也称()()00N n n n n =-为后继函数。
当后继函数()00N n =时,即()0n n n =表示过0Q 点的轨线是一条闭轨线。
通过对后继函数的几何理解,很容易得出下列有关极限环稳定性的重要结论若对法线段AB 上任意一点均有()000n N n >或()'00N >,则Γ为不稳定的极限环;若()000n N n <或()'00N <,则Γ为稳定的极限环;若()()0000N n n <≠,则Γ为外稳定而内不稳定的半稳定极限环; 若()()0000N n n >≠,则Γ为外不稳定而内稳定的半稳定极限环; 若()00N n ≡,则Γ为周期环。
根据后继函数()0N n 的零点个数,可以定义极限环的重数 定义2 若()()()()'k-1000=0,00k N N N N ===≠L则称Γ为k 重极限环。
特别地,1k =称Γ为单重极限环或简单极限环。
显然这里的k 重极限环对应于后继函数的k 重根。
通过后继函数()0N n 在零点泰勒展开很容易的到这个结论。
2 曲线坐标与极限环的稳定性设有系统(1)的闭轨线Γ,逆时针方向,其房程为()(),x f t y g t ==f 与g 均为周期为T 的周期函数. 在Γ的足够小的邻域(),δΓU 内,建立曲线坐标如下图2,(),Q δ∀∈ΓU ,过Q 点作Γ的法线与Γ相交于P 点。
取法线方向向外为正。
在Γ任意固定一点0P 作为度量弧长的起点,顺时针方向为正,并记弧长»0PP s =,法线上的有向距离PQ n =。
于是()U ,δΓ内的点Q 与数组(),s n 构成一一对应的关系,称(),s n 为Q 点的曲线坐标。
图2设Q 点的直角坐标为(),x y ,曲线坐标为(),s n ,Γ以弧长s 为参数的参数方程为()(),0x s y s s l ϕψ==≤≤,其中l 为Γ的弧长,从而P 点的直角坐标为()()(),s s ϕψ. Γ 在P 点的单位法向量为()()()0'',n s s ψϕ=-,于是()()()'',PQ n s s ψϕ=-u u u r又由于OQ OP PQ =+u u u r u u u r u u u r所以可以得到直角坐标与曲线坐标的关系()()()()''0x s n s s l y s n s ϕψψϕ⎧=-⎪≤≤⎨=+⎪⎩ (2)从而可以利用公式(2)把给定的直角坐标下的坐标(),x y 转化为曲线坐标下的坐标(),s n ,得到()()'''''''',Q P n P Q dn F s n ds P Q ϕψϕψϕψ--+==+ (3)显然极限环Γ对应于它的零解0n =,并将上式分离出线性项得()()',0dnF s n o n ds=+其中()()()()2'''2200000000'32220,0y y x xn P Q P Q P Q Q P F s H x PQ--+=+@(4)所以方程(3)的一次近似方程为()dnH s n ds= (5)方程(5)满足初始条件()00n n =的解为()()00exps n n H u du =⎰从而对极限环的稳定性,有如下定理定理1 当()00sH s ds <⎰时极限环Γ是稳定的;当()00s H s ds >⎰时,极限环Γ是不稳定的,其中l 是极限环Γ的弧长.证 对Γ足够小邻域内的任意一点0n ,考虑后继函数()()()()()()00000exp1l N n n n n n H s ds o n =-=-+⎰显然,当()()000l H s ds <>⎰时,有()()0000n N n <>,从而Γ是稳定(不稳定)极限环。
对于定理1,里面表达式是在曲线坐标下的,用起来不方便,现在把它转化为直角坐标下的表达式,有如下定理定理2 若沿着系统(1)的极限环Γ有()000TP Q dt x y∂∂+<>∂∂⎰则Γ的极限环是稳定(不稳定),其中T 是极限环Γ的周期证明过程利用曲线坐标与直角坐标的关系就可以直接得到定理中的两式子是相等.定义3 沿系统(1)闭轨线Γ的下述表达式001T P Qh dt T x y∂∂+∂∂⎰@称为Γ的特征值数,其中T 是极限环Γ的周期显然,当()000h <>时,极限环Γ的稳定(不稳定)。
由以上讨论容易看出,Γ是单重极限环的充要条件是其特征值数00h ≠,事实上,由单重极限环的定义可知()'00,N ≠其中()()000N n n n n =-从而()()()()()()()'0000000000limlim 1lim exp 1exp 1x x l x N n N n n N n n o n H s ds n Th →∞→∞→∞⎡⎤-=-⎢⎥⎣⎦⎡⎤=-+⎢⎥⎣⎦=-⎰由此可知,上式充要条件成立。
通过上述定理2和定义3,都可以来用判断极限环的稳定性,但是由于极限环的方程一般来说很难求得,因此用上述定理判断极限环稳定性或求解极限环的特征值数,是很困难的。
当然,有些时候,可以利用给定的微分方程组通过估计的方法来确定极限环特征值数的符号,由此便可以判断极限环的稳定性。
不及如此有时还能用来确定极限环的唯一性和不存在性。
例如,如果求得一个系统仅有一个奇点,而且还能估计出系统若存在一个Γ极限环,则极限环的特征值数00h <,即极限环必稳定。
同时,也说明了此系统仅含有一个极限环,若还存在其他的极限环,不妨设为Γ,则Γ靠近Γ的一侧必不稳定,从而与特征值数00h <矛盾。
如果还能证明这个唯一的奇点是稳定的,离它最近的极限环必然是不稳定的,也与特征值数00h <矛盾,这就说明了极限环的不存在性。
下面的例题也可以说明这一情况。
例1 证明如下系统在全平面存在唯一的闭轨线Γ,并且它是双曲的稳定极限环,单位圆周位于Γ所围区域。
()()333,23,2dx x y x P x y dt dy x y y Q x y dt⎧=--⎪⎪⎨⎪=+-⎪⎩@@(6)证 显然此系统有唯一的奇点()0,0,并且是不稳定的焦点. 取Liapunov 函数()()221,2V x y x y =+ ,则其全导数为 ()()()()224422222233=222dV x y x y x y x y x y dt ⎡⎤+-+=+-++⎢⎥⎣⎦(6) 当221x y +≤时,()60dVdt>,因此由Poincare 切性曲线法定理知系统在221x y +≤内无闭轨线,并且任何闭轨与单位圆周不相交。
若不然,假设存在一个闭轨°Γ与单位圆周C 相交,如图(3)所示由于选取的V 函数的全导数在单位圆周上的全导数大于零,所以系统轨线通过圆周的方向都应该是指向圆周外侧的,所以从上图可以看出,其闭轨Γ的轨线方向与圆周上轨线的方向矛盾,所以轨线与园周边不想交. 另一方面,引入极坐标cos ,sin x r y r θθ== ,则()()222442=32cos sin 322dV r r r r dt θθ⎡⎤-+≤-⎣⎦(6) 这里是因为()2442211cos sin 12sin cos 1sin 222θθθθθ+=-=-≥。
所以当223x y ε+≥+时,()60dVdt<,其中0ε>。
由环域定理知,系统在环域2213x y ε<+<+至少存在一个闭轨线Γ,显然它是环绕单位圆周的。
下面来说明它也是系统唯一的闭轨,并且是双曲稳定的极限环。
事实上,由()22310P Q x y x y ΓΓ∂∂⎡⎤+=-+<⎣⎦∂∂这里是因为在Γ上,有221x y+>。
有上述的定义(3)可知特征值数00h<,显然闭轨线Γ是双曲的稳定极限环. 有注意到系统有唯一的不稳定奇点,如果系统还存在另外的闭轨线,这条闭轨也围绕单位圆周,又由于其特征值数小于零,可知这条闭轨线也是稳定的,从而与我们上述分析的矛盾,所以此系统仅存在唯一的闭轨线Γ.所以说,虽然求解一个闭轨的特征指数需要知道其闭轨的方程,但有些时候,我们仅仅利用原系统的性质就可判断出特征值数在某一区域的符号,这对我们来判断极限环的唯一性,存在性,稳定性带来了很大的便捷。
而且有些时候,还可以判断奇点的全局稳定性. 就像例1,我们首先判断出了系统仅有唯一的一个奇点,而且是不稳定的,所以才有下述的结论,倘若我们计算出来的是系统仅有唯一的一个奇点,而且这个奇点是稳定的,还可以证明其特征值数是小于零的,也就是如果系统存在极限环,则一定是稳定的,从而与奇点稳定产生矛盾,进而说明系统不存在极限环,所以这个奇点是全局稳定的.。