动量矩定理
第十三章动量矩定理_理论力学

式中
分别为作用于质点上的内力和外力。求 n 个方程的矢量和有
式中
,
于 点的主矩。交换左端求和及求导的次序,有
为作用于系统上的外力系对
令 (13-3)
为质系中各质点的动量对 点之矩的矢量和,或质系动量对于 点的主矩,称为质系对 点的动量矩。由此得
(13-4) 式(13-4)为质系动量矩定理,即:质系对固定点 的动量矩对于时间的一阶导数等于外力 系对同一点的主矩。
设 Q 为体积流量, 为密度, 和 分别为水流进口处和出口处的绝对速度, 和 分别为涡轮外圆和内圆的半径, 为 与涡轮外圆切线的夹角, 为 与涡轮内圆切线的
夹角,则
由动量矩定理 得
为叶片作用于水流上的力矩。若水涡轮共有 个叶片,则水流作用于涡轮的转动力矩为
方向与图示方向相反。 §13-2 刚体绕定轴转动微分方程
解:取两叶片间的水流为研究对象(图 13-4 中的兰色部分)。作用于质系上的的外力有 重力和叶片的约束力,重力平行于 z 轴,对转动轴之矩为零。所以外力主矩为叶片对水流
的约束力对 z 轴之矩 。
计算 时间间隔内动量矩的增量 。设 t 瞬时占据 ABCD 的水流,经过 时间间隔
后,运动至占据
,设流动是稳定的,则
有
式中
得
(13-8)
或
(13-9)
此式称为刚体绕定轴转动的微分方程。
为刚体绕定轴转动的角加速度,所以上式
可写为
(13-10)
1.由于约束力对 z 轴的力矩为零,所以方程中只需考虑主动力的矩。 2.比较刚体绕定轴转动微分方程与刚体平动微分方程,即
与
形式相似,求解问题的方法和步骤也相似。 转动惯量与质量都是刚体惯性的度量,转动惯量在刚体转动时起作用,质量在刚体平动
动量矩定理

第十一章动量矩定理§11-1 引言建立质点或质点系的动量对于某固定点(或固定轴)的矩的变化与作用在该质点或质点系上的力系对同一点(或轴)的主矩之间的关系。
Pr ωε§11-2 动量矩一、质点动量矩Vm r V m M L o o r r r r r ×==)(的动量矩为则质点对固定点的速度为时作空间曲线运动,在瞬的作用下在力的质点设质量为O V t F M m ,r r 方向:右手螺旋法则大小:OAB o S d mV L ∆==2)(1、动量对点之矩V m r L o r r r ×=2、动量对轴之矩)(V m M L z z r =正负:右手规则是标量z L 质点对O 点的动量矩矢在通过O 点的任意轴上的投影,等于质点对该轴的动量矩。
zz O L L =)(r OabS ∆±=2d v m ′′±=)(二、质点系动量矩各质点动量对某点O 的矩的矢量和(即质点系动量对O 点的主矩)称为该质点系对点的动量矩。
n n n o V m r V m r V m r L r r L r r r r r ×++×+×=222111各质点动量对某轴的矩的代数和称为该质点系对该轴的动量矩。
)()()(2211n n z z z z V m M V m M V m M L r L r r +++=∑=)(i i O V m M r r ∑×=i i i V m r r r ∑=)(i i z V m M rV m r L o r r r ×=由§11-3 质点的动量矩定理V m dt r d dt V m d r dt V m r d r r r r r r ×+×=×)()(得:V dt r d r r =∴dt V m r d )(r r ×∴O 点为固定点V m dt r d r r ×∴一、矢量形式0=V m V r r ×=F r r r ×=dt V m d r )(r r ×=oM F)()(F M dt L d F r dt V m r d o o r r r r r r r =×=×或质点的动量对任一固定点的矩对时间的导数等于作用于该质点的力对同一点的矩。
动量矩定理
mO (F ) mAgr mB gr 0
LO const 0,
即:质点系对轴 O 的动量矩守恒, 且等于零。 vA mAvAar mBvBar 0
O
RO
vB
mAg mBg
见后续
v Aa vBa
即: 二猴的绝对速度永远相等,比赛不分胜负!
二猴爬绳比赛分析 因为二猴的体力有差异,所以
所以得
n d (e) d M M ( m v ) ( 交换求导数与求和的次序 ) ( m ) oi v i ) i i M o ( Fi o dt dt i 1 i 1 i 1 n
n
质点系对定点的动量矩定理
(e) d M o (mi vi ) M o (Fi ) dt i 1 i 1 n n
动量对固定轴z的矩:
[Mo(mv)]z= M z(mv) =±2S△OA'B'
指向:按右手螺旋规则定。
结论:
• 质点的动量对点O的矩称为质点对于O的动量矩。
Mo(mv)= r×mv
矢量
• 质点的动量mv 在Oxy平面内的投影(mv)xy对于点O 的矩定义为质点对于z轴的动量矩。
• 质点对点O的动量矩矢在z轴上的投影,等于质点对z轴的动量矩,即
质点对某轴的动量矩对时间的一 阶导数,等于作用力对于同一轴的矩。
d M ( mv ) M ( F ) x dt x d M ( mv ) M ( F ) y y dt d M ( mv ) M ( F ) z z dt
关于质点动量矩守 恒
• 当MO( F ) = 0 时,有MO( mv ) = 常矢量。
正确解法
Mf
O2 R2
11)动量矩定理
动量矩定理
质点对某定点的动量矩对时间的一阶导数
等于作用力对同一点的矩
第十一章 动量矩定理
2、质点系的动量矩定理
根据质点动量矩定理:
e i d M O mi vi M O Fi M O Fi dt e i d 对于质点系: M O mi vi M O Fi M O Fi dt i 内力总是成对出现: M O Fi 0
时圆盘和人静止,求圆盘的角速度和角加速度
z
v
B
R
O
r
第十一章 动量矩定理
§11-3 刚体绕定轴的转动微分方程
z
F1
O1
定轴转动刚体的动量矩: L J z z
Fn
d 根据动量矩定理: J z M z Fi dt d d 2 Jz J z J z 2 M z F dt dt
第十一章 动量矩定理
将 mi vi mvC 和 vi vC vir 代入: rC mi vi ri mi vi rC mvC ri mi vC vir rC mvC mi ri vC ri mi vir
C
A
e
r
P
第十一章 动量矩定理
3、相对于质心的动量矩定理
dLO d e ri rC ri rC mvC LC ri Fi dt dt e e 右边 rC Fi ri Fi drC dLC d 左边 mvC rC mvC dt dt dt e dLC vC mvC rC maC maC Fi dt e dLC rC Fi dt
7-2动量矩定理
vA
A B
vB
解
取滑轮与A和 两人为研究对象 两人为研究对象, 取滑轮与 和B两人为研究对象, 系统对O点动量矩守恒 点动量矩守恒: 系统对 点动量矩守恒:
r ⋅ (mv A − mvB ) = 0
O
v A = vB
vA
A B
vB
设绳子移动的速率为u 设绳子移动的速率为
v A = u1 − u vB = u2 + u
s w w s LO1 = J O1 ωa + J O1 ωa
s w 记系统总转动惯量为 J O = J O + J O ,有
1 1 1
s w LO1 = J O1 ωa + J O ωrw
ωrw 为动量轮相对卫星的角速度 其中
vA = 0
dLA ( = M Ae ) dt
质系对固定点A的动量矩的变化率等于 质系对固定点 的动量矩的变化率等于 作用在质系上的外力系对A点的主矩 点的主矩。 作用在质系上的外力系对 点的主矩。
( (e (e (e M Ae ) = M Ax) i + M Ay) j + M Az) k
LA = LAx i + LAy j + LAz k dLAy dLAx (e) ( e ) dLAz (e = M Ax , = M Ay , = M Az) Axyz为定系或平动系 为定系或平动系 dt dt dt
LOz = const
当外力系对某固定轴的合力矩等于零时, 当外力系对某固定轴的合力矩等于零时,质系对于 该轴的动量矩保持不变。 该轴的动量矩保持不变。
实例分析
通过改变转动惯量来控制角速度。 通过改变转动惯量来控制角速度。
第11章 动量矩定理

O点为矩心
M O (F ) r (F )
描述:质点相对某点“转动”运动强度。
§11-1 动量矩计算
质点对轴的动量矩
Lz M z (mv ) [MO (mv )]z
M z (F ) M O (F )
一般规定:
与轴的正向一致(逆时针转动)取“+”, 与轴的正向相反(顺时针转动)取“-”。
n dLx M x (Fi ( e ) ) dt i 1 n dLy M y (Fi ( e ) ) dt i 1
§11-2 动量矩定理
3. 质点动量矩定理(固定点、动点)
A为动点 L A (mv ) r rA mv d d d L A (mv ) r rA mv r rA (mv ) dt dt dt
n (e) dLO MO ( Fi ) dt i 1
其中: LO M O (mi vi ) ri mi vi
i 1 i 1 n n
§11-2 动量矩定理
2. 质点系动量矩定理
B. 对固定轴
n (e) dLz M z ( Fi ) dt i 1
1 4 1 J z r dm r 2rdr 2 R MR2 4 2 0
2 2
R
2 z R 2
要求记住!
§11-1 动量矩计算
D. 匀质薄圆板对于径向轴的转动惯量
圆板对于x与y轴的转动惯量相等: Jx J y
J z mr i m( xi yi ) mx i my i
§11-2 动量矩定理
4. 质点系动量矩定理
任意质点对动点A动量矩定理:
第11章 动量矩定理
M z Q(v1r1 cos1 v2r2 cos2 )
例 3 (书上例 11-7,动量矩守恒。)
质量为 m1 = 5kg,半径 r = 30cm 的均质圆盘,可绕铅直轴 z 转
动,在圆盘中心用铰链 D 连接一质量 m2 = 4kg 的均质细杆
AB,AB = 2r,可绕 D 转动。当 AB 杆在铅直位置时,圆盘的
三、 刚体 1. 平动刚体
11-1
LO r MvC
2. 转动刚体(对定轴或平面上定点)
Lz I z
LO IO
3. 平面运动刚体
对质心 C: LC IC
对定点 O: LO mO (MvC ) IC
对瞬心 C': LC IC
11.2 动量矩定理
一、 质点动量矩定理
由牛顿第二定律: ma F
l 3g
而 aC
2
4
则
W 3g W
NA W g
4
4
IV. 绳子剪断前后 A 反力的变化:
WW W ΔN A N A N A0
42 4
例 2 例 11-5 (较典型题目)
作业:11-18
11.4 质点系相对动点的动量矩定理(*)
此部分较难,特别是公式推导不易理解。主要掌握两种:①对质心的动量矩定理;②平
m2 g
转速为 n = 90rpm。试求杆转到水平位置,碰到销钉 C 而相对
静止时,圆盘的转速。
解:系统对 z 轴动量矩守恒。
初时系统动量矩: Lz I z盘 1 m1r 2 4
末时系统动量矩: Lz Iz盘 Iz杆 1 m1r2 1 m2 (2r)2
4
12
Lz Lz
11-4
1 4
m1r 2
第十二章 动量矩定理

Lz=Jzω
§2 动量矩定理
一、质点的动量矩定理
设质点质量为m, 受力F, MO(mv) 动量mv,定坐标系Oxyz , 根据质点的动量定理 z
F
B
mv
r
o A y
MO(F)
d (mv ) F dt
等式两边同时与矢径r作矢量积, 即 x
d (mv ) r F r dt
MO(F)
?
d (mv ) r F 为求等式 r 左边项,先来看 dt d (r mv ) dr mv r d (mv ) dt dt dt v ( r d ( v mv∵O为定点!)mv ) dt MO(mv) =0
第十二章
动量矩定理
z
§1 动量矩的概念
一、质点的动量矩
F r
o
B A m
y
回顾: 力对点的矩 Mo(F)= r×F 若 r=xi+yj+zk F=Fxi+Fyj+Fzk
则 i M o (F ) x Fx
j y Fy k z Fz
MO(F)
x
大小:│Mo(F) │ =2S△OAB
方向:按右手螺旋规则定。
[Mo(mv)]z= M z(mv)
代数量
• 动量矩的量刚为 ML2T-1 (kg· 2/S) m
二、质点系的动量矩
质点系对固定点O的动量矩等于各质点对同 一点O的动量矩的矢量和(即质点系动量对点O 的主矩):
对定点
Lo M o (mi vi )
i 1
n
矢量
质点系对固定轴z的动量矩等于各质点对同一 轴z的动量矩的代数和,即
vC
C
Lo = M o(Mvc)
理论力学第十一章动量矩定理

2.规则几何形状物体的转动惯量
J Z = ∫ r 2 dm
均质圆环:
J z = ∑ ΔmR 2 =MR 2
往三个坐标轴投影:得到质点对轴的动量矩定理: d m x (mv ) = m x ( F ) dt d m y (mv ) = m y ( F ) dt d m z (mv ) = m z ( F ) dt (1)若Σmo(F)≡0, mo(mv)=常矢量; 两种特殊情况: (2)若Σmx(F)≡0, mx(mv)=常量。 以上两种情况均称为动量矩守恒
R 别为J 1 和J 2 ,两轮的半径分别为 R1 、 2 ,传 动比 i12 = R2 / R1 。轴Ⅰ上作用主动力矩 M 1 , 轴Ⅱ上有阻力矩 M 2,转向如图。忽略摩擦。 求轴Ⅰ的角加速度。
例 图示传动轴,轴Ⅰ和轴Ⅱ的转动惯量分
Ⅱ
M2
M1
Ⅰ
解 :分别取轴Ⅰ和Ⅱ为研究对象。受力如图。 两轴对各自轴心的转动微分方程分别为
体积
2π R
π R2
4 π R3 3
4π R 2
Δm
1 1 J O = ∑ ΔMR 2 = MR 2 2 2
N维球
均质直杆:
J z = ∫ x 2 ρ l dx =
0
l
ρl l 3
3
1 2 J z = Ml 3
z
1 1 2 2 J z = ∑ (Δm)l = Ml 3 3
l
x
z
dx
Δm
x
第12章-动量矩定理

旳乘积: J z m z2
细直杆 均质圆环 均质圆板
J z /m 1 / 3 l2 z 0.5774 l
J z /m R2 z R
J z /m 1 / 2 R2 z 0.7071R
z 假如把刚体旳质量全部集中在与 轴相距为ρ z 旳点
上,则此质点对 z 轴旳转动惯量与原刚体相同。
四、平行轴定理
J z J z md 2
定理:刚体对任意轴旳转动惯量,等于刚体对 于经过质心、并与该轴平行旳轴旳转动惯量, 加上刚体旳质量与两轴间距离平方旳乘积。
z
O
z
d
ri
ri
C
O
mi
zi
y( y)
C点为质心;
O z 为质心轴,O z
为与之平行旳任
xi
一轴,距离为 d 。
x d x yi J z mi ri2 mi ( xi2 yi2 )
d dt
(
J
z
)
Jz
Mz
dω dt
(Fi
)M
M z (Fi )
z
(
FN
i
)
Fi
或
Jz
d2
dt2
M z (Fi )
或 J z M z (Fi )
FNi
与 m a Fi 比较
例:已知滑轮半径为 R ,转动惯量为 J ,带动滑轮
旳皮带拉力分别为 F1 和 F2 。求滑轮旳角加速度 。
F2 解:根据定轴转动微分方程
d(ri
mivi ) dt
ri
F (e) i
ri
Fi(i)
(i 1,2,, n)
相加得
理论力学第13章动量矩定理

mi
rC x′
C
y′ y
mi vi mvC
LC ri mi vi
x
LO rC mvC LC
LO rC mvC LC
dLO d (e) (rC mvC LC ) r i Fi dt dt
r i rC ri
drC dLC d (e) i Fi ( e ) mvC rC mvC r C Fi r dt dt dt
v R
应用动量矩定理
O
FOx
mg
M
(e)
WR
dLO (e ) M dt
WR 2 a W 2 (JO R ) g
P
v
JO W dv ( R) WR R g dt
W
z
例 题3
z
求:此时系统的角速度 解:取系统为研究对象
M
A
(e ) z
0
A
B
a l
a
B
Lz 恒量
l
由质心坐标公式,有
z
vi z′ ri r′ i rC x′
C
mi
y′ y
O
mi ri mrC 0
x
LC ri mi vir
§13-6 刚体的平面运动微分方程
LC J C
由质心运动定理和相对于质 心的动量矩定理,有:
y
Fn
y′
D
F2 F1
maC Fi ( e ) d (e) J C J C M C ( Fi ) dt
用于质点系的外力对质心的主矩 ,这就是质点系相对于质心(平移
系)的动量矩定理。
理论力学第14章动量矩定理
J yz J zy mi yi zi
(e)
如果对某坐标系所有惯性积均为零,则三根坐标轴称为刚体过
O
点的惯量主轴,相应的转动惯量称为主转动惯量。 如果惯量主轴还通过刚体质心,则称为中心惯量主轴。
14.3 矩心为质心的动量矩定理 14.3.1质点系对质心的动量矩定理 1.质点系对质心动量矩的定义
d r mv r F dt
(c)
(14-3)
d m yz zy yFz zFy dt d m zx xz zFx xFz dt
d m xy yx yFz zFy dt
动量矩定理
(图14-6)。
图14-6 柯尼希坐标系
或 z 都是反映刚体质量分布情况的物理量。
J z x 2 y 2 dm
(14-1 )dm J x ( y 2 z 2 )dm
(14-19b)
图14-3转动惯量的定义
图14-4 转动惯量的平行轴定理
2. 平行轴定理 J ( x y )dm ( x a )
第14章 动量矩定理
14.1 矩心为定点的动量矩定理 14.1.1 质点的动量矩定理
动量对空间某点或某轴线,叫做动量矩,也叫角动量
LO r p
p对
(14-1) (14-2a) (14-2b) (14-2c)
x, y, z 轴的动量矩则为
LOx m yz zy
LOz m xy yx
ΓO r I
叫冲量矩。故质点动量矩的变化,等于外力在该时间内给予该质点的冲量矩。
(14-7b)
14.1.2 质点系对定点的动量矩定理 L r m r (14-8)
第三章动量矩定理
1 2 Jz = ml 12
1 2 3 ρz = l = l 12 6
B 匀质薄圆环对于中心轴的转动惯量: 匀质薄圆环对于中心轴的转动惯量:
Jz =
∫
m
0
R dm = mR
2
2
Jz = m 2 R
C 匀质薄圆板对于中心轴的转动惯量: 匀质薄圆板对于中心轴的转动惯量:
ρz = R
m = 2πr dr ⋅ ρA i i i m 式中: ρA = 2
Jxy = ∑ xy m
分别称为刚体对轴y和 , 分别称为刚体对轴 和z,对轴 z和x以及对轴 和y的惯性积。 以及对轴x和 的惯性积。 和 以及对轴 惯性积可正、可负, (2) 惯性积可正、可负,也可等 于零(转动惯量永远是正) 于零(转动惯量永远是正)。
刚体对任意轴的转动惯量 把式(1)和式 和式(2)代入(a)式最后得 代入( 把式 和式 代入 ) 刚体对于轴OL的 刚体对于轴OL的转动惯量 J = Jx cos2 α + Jy cos2 β + Jz cos2 γ
M o (mv) = ml 2ω sin θ
方向同上 故有: Lo = 2ml
2
ω sin θ
若考虑杆子的质量,则需要进行积分。
3.平动刚体对固定点的动量矩 平动刚体对固定点的动量矩 设刚体以速度v平动,刚体内任一点A的矢径 是 ri ,该点的质量为mi,速度大小是 vi 。 该质点对点O 的动量矩为 MO(mivi) = ri ×mivi LO =∑ MO(mivi) = ∑ ri ×mivi 因为刚体平动 v i= v = v C
2.质点系动量矩的计算 质点系动量矩的计算
◆质点系对点的动量矩:
LO = ∑MO(mivi) =∑r × mivi
理论力学_12.动量矩定理

动量定理: 质心运动定理:
dp dt
F
(e) i
M aC
Fi
(e)
质点、质点系 动量的改变—外力(外力系主矢)
质心的运动—外力(外力系主矢) 若当质心为固定轴上一点时,vC=0,则其动量恒等于零, 质心无运动,可是质点系确受外力的作用。 动量矩定理建立了质点和质点系相对于某固定点(固轴) 的动量矩的改变与外力对同一点(轴)之矩两者之间的关系。
取固结于质心的平动参考系, 由速度合成定理,有
所以 由于 故
LC
ri m i v
i
即:质点系对质心的绝对运动动量矩,等于质点系对随质 心平动的参考系的相对运动动量矩。
结论:在计算质点系对于质心的动量矩时,用质点相对于 惯性参考系的绝对速度vi,或用质点相对于固结在质心上的 平动参考系的相对速度vi`,所得结果是一样的。 l
LO
1 P 2 g
代入 , 得
r
g
2
( P A PB
P 2
)
由动量矩定理:
d r2 P [ ( P A PB )] ( P A PB ) r dt g 2
PA PB d g dt r PA PB P /2
§8-3 动量矩守恒
动量矩定理:内力不会改变质点系的动量矩,只有外力才 能改变质点系的动量矩。 质点系的动量矩守恒 当
质点绕某心(轴)转动的问题。
二.质点系的动量矩定理 对质点Mi :dt
d m O (m iv i ) m O ( Fi
d dt m O (m iv i )
()
) m O ( Fi
(i)
(e)
理论力学10动量矩定理

在更高维度的空间中,动量矩定理可以通过向量的外积和叉积进行推广,适用于描述更复杂系统的动量矩变化。
n维空间推广
定理在更高维度空间的应用
多体系统
动量矩定理可以应用于多体系统,描述多个刚体之间的相互作用和运动关系,为多体动力学提供了基础。
非惯性参考系
在非惯性参考系中,动量矩定理需要考虑科里奥利力和离心力等因素的影响,以准确描述系统的动量矩变化。
定理证明的思路
在证明过程中,需要引入质点的质量、速度、位置矢量等概念,以及力、力矩等物理量。
引入相关概念
根据物理定律和数学公式,进行详细的数学推导,包括向量的点乘、叉乘等运算。
进行数学推导
经过推导,得出动量矩定理的结论,即质点系的动量矩等于外力矩对时间的积分。
得出结论Βιβλιοθήκη 定理证明的过程通过证明,得出的动量矩定理表述为:质点系的动量矩等于外力矩对时间的积分。
力矩的作用
力矩是描述力对物体运动轴的转动效应的物理量。在动量矩定理中,力矩的作用是改变物体的动量,即改变物体的运动状态。
时间和空间的影响
动量矩定理不仅涉及到物体的运动状态(动量和速度),还涉及到时间的变化率(即加速度),以及力作用的空间效应(即力矩)。因此,这个定理全面地描述了物体在空间和时间中的运动规律。
定理的物理意义
02
CHAPTER
定理的证明
首先明确动量矩定理的定义和意义,即对于一个质点系,其动量矩与外力矩之间的关系。
引入动量矩定理
建立证明框架
推导定理的表达式
根据定理的证明需求,建立证明的框架,包括定义、假设、推导和结论等部分。
根据牛顿第二定律和动量定理,推导出动量矩定理的表达式。
03
第九章 动量矩定理

LZ =
∑M
Z
(mi v i )
质点系对点O的动量矩矢在通过该点的 轴上 质点系对点 的动量矩矢在通过该点的z轴上 的动量矩矢在通过该点的 的投影等于质点系对于该轴的动量矩。 的投影等于质点系对于该轴的动量矩。
[LO ]Z
= LZ
4
刚体平移时 可将全部质量集中于质心, 刚体平移时,可将全部质量集中于质心,作为一个 质点计算其动量矩。 质点计算其动量矩。 刚体转动时 刚体转动时,刚体对转轴的动量 矩为
dLO = Labcd − LABCD = LCDcd − LABab
LCDcd 1 = qV ρ dt v2 r2 cosθ2 n
1 LABab = qV ρ dt v1 r cosθ1 1 n 1 dLO = qV ρ dt (v2 r2 cosθ2 − v1 r cosθ1) 1 n dLO MO (F ) = n = qV ρ(v2 r2 cosθ2 − v1 r cosθ1) 1
6
d d dr d × mv + r × ( mv ) M O ( mv ) = ( r × mv ) = dt dt dt dt
dr =v dt
则上式为
d (mv ) = F dt
d M O (mv ) = v × mv + r × F dt
因为 所以
v × mv = 0
r × F = M O (F )
dt
16
【例4 】已知 m JO, 1 m2 r ,2 ,不计摩擦。 , m, ,1 r 不计摩擦。 求(1) α ) (2)O处约束力 F ) 处约束力 N (3)绳索张力 FT , T ) F
1 2
17
解:1) LO = JOω + m v1r + m2v2r2 ( ) 1 1 = ω(JO + m1r 2 + m2r22 ) 1
第十二章 动量矩定理

2 mo mv ml l ml
O
0
mo T o
l
T
C
mo F mglsin
v
mg
注意:在计算动量矩与力矩时,符号规定应一致(在 本题中规定逆时针转向为正)。 根据动量矩定理,有
kg m 2 s
二、质点系动量矩 1、对点的动量矩:
LO M O (mi vi )
i 1
n
2、对轴的动量矩(即上式在各轴上的投影):
Lz M z (mi vi )
3、刚体的动量矩 (1)平移刚体:刚体上任意点的速度均与其质心速度 相同。故可将其看作为质量集中与质心的一个质点。 对点的:
dx 2 m glsin m l dt
即
g sin 并令 l
2 n
g sin 0 l
——(1)
则(1)式化为
0
2 n
解此微分方程,并将运动初始条件带入,即当t=0时
0
0 0
0 cosnt
质点系对固定点的动量矩定理为:
d (i) (e) M O(mi vi ) M O(Fi ) M O(Fi ) dt
其中: M O(Fi (i) ) 0
d d d LO M O(mi vi ) M O(mi vi ) dt dt dt
e d LO M O Fi dt
O
J O J O1 J O 2
l
mg
C
1 2 1 2 2 ml mR ml R 3 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动量矩定理
蜻蜓、飞机和直升机
儿时的我很爱雨后捉蜻蜓。
夏天一场大雨过后,街道上和低洼处到处是水坑。
许多蜻蜓在水面上下飞舞,并不时用尾巴尖端表演“蜻蜓点水”的特技。
我们就用长竿端部的网兜捕捉蜻蜓,捉到后用细线拴住它的腰部,看它在我的掌握之中乱飞,快乐异常。
长大后对蜻蜓的兴趣转为对飞机的热爱,考大学选了飞机设计专业。
飞机(为了与直升机区别,可称其为“平飞飞机”,这里是按它们的飞行状态来区分的)的机翼与蜻蜓的翅膀极为相似,可是它在天空只能不停地往前飞行,不能停止。
蜻蜓就有这个本事。
直升机克服了平飞飞机(下文中仍简称为飞机)不能在空中悬停的缺点,它依靠旋转的翅膀(正确术语为旋翼)能在空中悬停,并可将重物吊起或降下,所以它在反潜、救灾、反恐、反海盗任务中有独特的优势。
直升机的先祖,至少可追朔到中国明代就出现的竹蜻蜓,直到如今仍是许多孩童的好玩具。
现代人又把它叫做“飞螺旋”和“中国陀螺”。
它用旋转叶片产生升力,使竹蜻蜓飞起来。
直升机和飞机的主要区别在于它们产生升力的机理不同。
飞机靠机身两侧的形似蜻蜓翅膀(见图1)的平直机翼提供升力,前进的动力是由机头的螺旋桨或尾部喷管(即尾喷管)的喷气来提供;而直升机则是借助旋转的机翼(旋翼)产生升力。
直升机的旋翼和飞机的螺旋桨都是用旋转的叶片推动空气产生作用力的。
飞机的螺旋桨基本不提供升力,只起克服空气阻力使飞机前进的作用;而直升机的
旋翼,主要提供升力;在需要前进时,倾斜旋转轴,从而造成水平分力,使直升机前进。
一般而言,直升机旋翼叶片的尺寸(长宽和面积)要比飞机螺旋桨叶片大得多。
直升机旋翼的种类
为了讨论直升机的动力学问题,先对直升机的类别进行简介。
按照旋翼的数目与配置以及叶片数目来区分,直升机有如下几种:
01
单旋翼直升机
顾名思义,单旋翼直升机就是它只有一个旋翼。
一般它必须带一个尾桨负责抵消旋翼产生的反转矩。
例如,欧洲直升机公司制造的EC-135直升机。
图2就是一个带尾桨的单旋翼直升机图片。
但是,也有单旋翼直升机无尾桨的情况,这时它的机身尾部侧面有空气排出管道,用喷气的反作用力来抵消旋翼产生的反转矩。
例如,美国麦道直升机公司生产的MD520N直升机。
“旋翼产生的反转矩”将是本文的讨论的重点。
02
双旋翼直升机
双旋翼直升机具有两个旋翼。
两个旋翼的排列有如下三个情况:
•纵列式:两个旋翼前后纵向排列,旋转方向相反。
例如,美国波音公司制造的CH-47“支努干”运输直升机。
•横列式:两个旋翼左右横向排列,旋翼轴间隔较远,旋转方向相反。
比如,前苏联的Mi-12直升机。
•共轴式:两个旋翼上下排列,在同一个转轴线上,互成反向旋转。
例如,前苏联的卡-50武装直升机。
(请见图7的共轴式双旋翼直升机图片)
03
四旋翼直升机
图3是中国研制的四旋翼无人直升机。
四个旋翼分为两对,分别以正螺旋和反螺旋方向旋转。
04
叶片数量
叶片数量往往与载重量大小相关,常见有2,3,4,8 个叶片。
例如米-8直升机有4个叶片;米-28有5个叶片;米-26直升机的旋翼有8个叶片,尾桨有5个叶片。
2008年5月26日,一架红色米-26直升机吊装了一台重约13.2吨的重型挖掘机,前往唐家山堰塞湖坝体。
图4为执行该项任务的米-26直升机照片。
倾转式旋翼飞机
美国V-22鱼鹰直升机就是倾转式旋翼飞机(参见图5),它兼有直升机和飞机的共同优点。
当旋翼的转轴竖直时,旋翼产生升力。
当转轴角(与竖直轴的夹角)
接近90度时,旋翼就变成螺旋桨,飞行速度由300公里/时,提高到500公里/时。
现在,美国V-22部署到东亚美军驻日基地,对中国进行威慑。
直升机旋翼动力学奥妙与动量矩守恒律
前边提到,单旋翼直升机除了有一个大的旋翼外,在尾部还有一个小的尾旋翼(也叫尾桨)。
图6是一个带镶嵌式尾旋翼(尾桨)的直升机。
尾桨产生的作用力沿水平方向,并且与机身垂直,对机身重心有一个力矩(转矩)。
再仔细看,尾桨力矩使机身转动的方向必然和主旋翼的转动方向相反。
在设计时,要保证尾桨的转矩与旋翼的动量矩大小相等方向相反。
这样直升机才能正常飞行。
下面我们从力学原理出发来讨论一下直升机运行的奥秘。
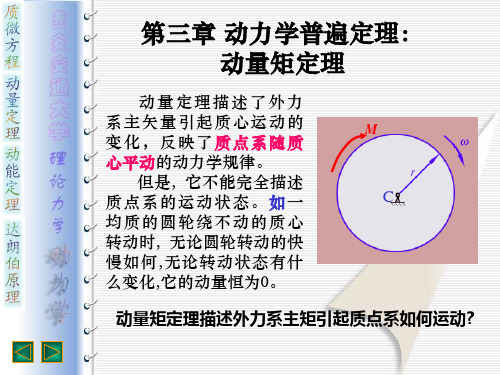
动量矩定理(Theorem of moment of momentum) 和动量矩守恒定律(Law of conservation of moment of momentum) 是刚体(或质点系)运动必须满足的动力学原理。
动量矩定理说,动量矩对时间的变化率等于外加力矩之总和。
当质点系不受外力作用或所受全部外力对某定点或定轴的主矩始终等于零时,该质点系对该点或该轴的动量矩保持不变。
即当作用于它的外力矩之和为零时,它的动量矩变化率将等于零。
这就是动量矩守恒定律。
为了更严格地说明动量矩定理和动量矩守恒定律,请看下边的公式:
01
动量矩
•质点对某点的动量矩为L0(mv)= rmv;其中,黑体符号L0、 r、v都是向量。
这个公式表明,质点m对0点的动量矩L0等于质点m到0点的矢径r与其动量mv的矢量积。
•刚体的动量矩为Lz=Jzω;其中,Jz为刚体对于转轴的转动惯量,ω是角速度向量。
02
动量矩定理
动量矩对时间的变化率等于外加力矩之总和,就是:
[Lz]' =∑Mz(Fi )
其中,等号左边是对动量矩Lz求时间导数,右边是对外力矩求和。
03
动量矩守恒定律
当上式的右端项为零时,Lz为常数,即动量矩永恒不变。
直升机在空中飞行时,它的旋翼不停地旋转,这将产生对直升机重心的动量矩。
由于它是孤立系统,外界对它的外力矩之和为零,如果没有尾桨的话,机身将不停地向旋翼旋转的反向旋转,这样就难以执行所指定的各类任务。
安装尾桨就是要以尾桨的力矩平衡这个“旋翼产生的反转矩”。
这就是直升机安装尾桨的力学意义。
为使机身不产生旋转,也不安装尾桨。
聪明的工程师们设计了共轴式双旋翼直升机(参见图7)。
它的两幅旋翼安装在同一个轴上,分别朝不同方向旋转,二者
的动量矩必须大小相等,构成平衡。
若是双轴两旋翼情况(如V-22鱼鹰直升机),要求两个旋翼的转动方向相反且动量矩相等。
对于四轴四旋翼情况,很容易推断,它们要两两成对,分别朝反向转动,动量矩大小要相等,以保证总动量矩为零。
刚体的转动惯量
上节提到Jz为刚体对转轴的转动惯量,它和物体平动的惯性量(即质量)类似。
当转动惯量越大时,转动它越困难,或者使它转动角速度增大越困难。
具有相同质量的物体,形状不同,其转动惯量大小不同。
以图8所示实心长方体为例。
这是一个三维尺寸为aⅹbⅹc的长方体,为简单起见,令b=2a=4c;根据理论力学教科书,有如下公式:
其中:Jz,Jy,Jx分别是绕z,y,x三个轴、对物体重心点0的转动惯量。
可见,Jz最大,Jx次之,Jy最小。
刚体的转动惯量问题,和我们身边的许多活动息息相关,这里以竞技运动为例。
体操和跳水运动员在做空翻或翻腾动作时,其身体的姿势(形态)决定了其动作的难度,裁判打分时给不同的难度系数。
例如图9a 所示的跳水女运动员所做的团身空翻(或向后翻腾),她的身体曲折成三段,各部分身体重量最靠近于重心。
于是,其转动惯量最小,可以使翻腾速度最快。
所以,在10米台跳水做翻腾三周半的动作时都多采用团身翻腾。
图9b所示的则是曲体空翻(或向后翻腾),她的身体呈曲两段折叠,其转动惯量比团身情况稍大。
难度系也较大。
最难做的是图9c所示的体操运动员所做的直体空翻。
由于直体的转动惯量最大,空翻最费力;难度系数最大。
同时由于姿态优美,打分较高。
另外,与转动惯量有关的例子还有高空走钢丝。
图10是阿迪力在新疆喀纳斯高空走钢丝的照片。
你看他两手紧握一根很长的平衡杆。
这根平衡杆与他的身体紧紧结合为一体,总的转动惯量大大增加。
一个很大转动惯量的物体,是不易被转动的,所以他的直立状态较为稳定,比较安全。
相反,如果没有这个平衡杆,他茕茕一身走在钢丝上,就很易翻倒。
这就是走钢丝的人必须握有平衡杆的力学奥秘。
最后,和动量矩守恒有关的例子是陀螺仪,它是具有高速旋转刚体转子、服从动量矩守恒律的一种常用仪表。
现代高精度的单自由度陀螺常是液浮、磁浮和气浮并用的三浮陀螺仪。
这种陀螺仪的精度极高。
陀螺仪广泛应用于各种运载体(如船舶、飞机等)上,成为各种运载体的自动控制、制导和导航系统中测定姿态、方位的重要元件。
实际上,地球就是一个巨大的陀螺仪,由于动量守恒,其旋转角速度恒久不变。
读者们是否可以设想一下,这对于我们人类生活会有哪些实际意义呢?。