南邮自动化人工智能3--确定性推理模板
智能推理提升方案策划书3篇
智能推理提升方案策划书3篇篇一《智能推理提升方案策划书》一、背景随着技术的不断发展,智能推理在各个领域的应用越来越广泛。
然而,目前的智能推理系统仍然存在一些局限性,如推理准确性不高、推理速度慢等。
因此,需要制定一套智能推理提升方案,以提高智能推理系统的性能和效率。
二、目标1. 提高智能推理系统的准确性和可靠性。
2. 提高智能推理系统的推理速度和效率。
3. 增强智能推理系统的可扩展性和灵活性。
三、方案内容1. 数据增强通过数据清洗、数据扩充等技术,增加训练数据的数量和质量,提高模型的泛化能力。
利用迁移学习、预训练模型等技术,将已有的知识和模型应用到新的任务中,提高模型的准确性和效率。
2. 模型优化选择合适的模型结构和算法,如神经网络、决策树、支持向量机等,提高模型的性能和效率。
对模型进行超参数调整、正则化等优化,避免过拟合和欠拟合现象的发生。
利用集成学习、多模型融合等技术,将多个模型组合起来,提高模型的准确性和可靠性。
3. 推理加速采用并行计算、分布式计算等技术,提高推理的速度和效率。
利用硬件加速技术,如 GPU、FPGA 等,加速模型的计算过程。
对推理过程进行优化,如剪枝、量化等,减少计算量和存储空间。
4. 可扩展性和灵活性采用模块化设计、微服务架构等技术,提高系统的可扩展性和灵活性。
支持多种数据格式和模型类型,方便用户进行定制和扩展。
四、实施计划1. 第一阶段(1-3 个月)完成数据收集和整理工作。
进行数据增强和模型优化实验。
搭建智能推理系统的基本框架。
2. 第二阶段(3-6 个月)对智能推理系统进行性能测试和优化。
开发用户界面和 API。
进行系统集成和部署。
3. 第三阶段(6-9 个月)对智能推理系统进行大规模测试和验证。
收集用户反馈,进行系统改进和优化。
发布智能推理系统的正式版本。
五、风险评估1. 数据质量问题数据清洗和扩充过程中可能会引入噪声和错误,影响模型的准确性。
数据的分布和特征可能会发生变化,导致模型的泛化能力下降。
人工智能精品:确定性推理方法
3.4 自然演绎推理方法
• 拒取式的一般形式为 P→Q,~Q=>~P
它表示如果谓词公式P→Q为真且Q为假,则可推 得P为假的结论。 • T规则允许在推理过程中随时将一些新的事实或 证据作为推理的前提条件引入推理过程,提高推 理效率。 • P规则允许将推理过程中产生的中间结果(即永 真蕴含式)引入推理过程,参与问题的推理求解。
推理方向用来确定推理的驱动方式,即是数据(证据) 驱动或是目标驱动。所谓数据驱动即指推理过程从初始证 据开始直到目标结束,而目标驱动则是指推理过程从目标 开始进行反向推理,直到出现与初始证据相吻合的结果。 按照对推理方向的控制,推理可分为正向推理、反向推理、 混合推理及双向推理四种情况。
3.1 推理概述
• 正向推理是一种从已知事实出发、正向使用推理规 则的推理方式,它是一种数据(或证据)驱动的推 理方式,又称前项链推理或自底向上推理。
• 反向推理是一种以某个假设目标为出发点,反向运 用推理规则的推理方式,它是一种目标驱动的推理 方式,又称反向链推理或自顶向下推理。
• 混合推理是把正向推理和反向推理结合起来所进行 的推理。
也就是说在进行推理时如果对某些证据不能证明其不成立的情况下先假设它是成立的并将它作为推理的依据进行推理但在推理过程中当由于新知识的加入或由于所推出的中间结论与已有知识矛盾时说明前面有关证据的假设是不正确撤消原来的假设以及由此假设所推出的所有结论重新按新情况进行推理
第三章 确定性推理方法
把人类的知识形式化、符号化,是知识表示所要研 究的内容。但要使计算机具有智能,仅仅使它拥有知识 还不够,还必须使其具有运用知识进行推理,实现问题 求解的能力。因此,有关推理方法的研究也是人工智能 的重要课题之一。按照推理过程所用知识的确定性,推 理可分为确定性推理和不确定性推理。自然演绎推理和 归结推理是经典的确定性推理,它们以数理逻辑的有关 理论、方法和技术为理论基础,是机械化的、可在计算 机上加以实现的推理方法。
南邮模式识别复习提纲(整理)
绪论列举三个模式识别的应用:人脸识别,语音识别,基因识别列举模式识别比较强的研究单位:拥有国家重点学科的五所大学:清华、上交、南理工、西交、北航。
中科院。
模式识别国家重点实验室---中科院北京自动化研究所---汉王识别系统。
机器人学国家重点实验室---中科院沈阳自动化所---机器人视觉(A TR导弹自动目标识别)。
南邮---江苏省图像处理与图像通信重点实验室。
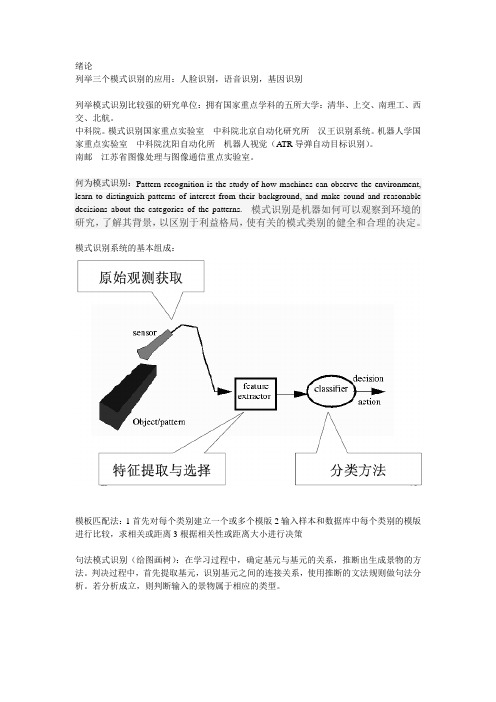
何为模式识别:Pattern recognition is the study of how machines can observe the environment, learn to distinguish patterns of interest from their background, and make sound and reasonable decisions about the categories of the patterns. 模式识别是机器如何可以观察到环境的研究,了解其背景,以区别于利益格局,使有关的模式类别的健全和合理的决定。
模式识别系统的基本组成:模板匹配法:1首先对每个类别建立一个或多个模版2输入样本和数据库中每个类别的模版进行比较,求相关或距离3根据相关性或距离大小进行决策句法模式识别(给图画树):在学习过程中,确定基元与基元的关系,推断出生成景物的方法。
判决过程中,首先提取基元,识别基元之间的连接关系,使用推断的文法规则做句法分析。
若分析成立,则判断输入的景物属于相应的类型。
监督学习与非监督学习的主要区别:训练样本的类别是否已知。
语音识别的基本单位:音素模式识别过程:1三个空间:模式空间 特征空间 类型空间2 三个操作:模式采集、特征提取/选择、以及分类决策第二章贝叶斯决策理论贝叶斯公式:最小错误率贝叶斯决策模式采集模式空间特征提取特征空间分类决策类型空间三种空间不同阶段的三种操作物理上可以察觉到世界∑===n 1j j j i i i i )(P )B |A (P )(P )|A (P P(A))A (P )A |(P B B B BB最小风险贝叶斯决策细胞化验ω1 正常,ω2异常;P(ω1)=0.85 P(ω2)=0.15;p(x|ω1)=0.15 和p(x|ω2)=0.45;判决两种α1, α2 。
人工智能 第3章(确定性推理3-与或树搜索)
包括基于距离的启发式函数、基于成本的启发式函数、基于规则的启发式函数等。
节点排序和选择策略
节点排序的目的和意义
节点排序是为了在扩展节点时,按照一定的顺序选择下一个要扩展的节点,以优化搜索过程。
常用节点排序策略
包括最佳优先搜索、广度优先搜索、深度优先搜索等。最佳优先搜索根据启发式函数的值来选择最优节点; 广度优先搜索按照节点的层次顺序进行扩展;深度优先搜索则尽可能深地扩展节点。
盲目搜索方法比较与选择
• 宽度优先搜索、深度优先搜索和迭代加深搜索都是盲目搜索方法,它们在不同的场景下有不同的应用。 • 宽度优先搜索适用于问题空间较大、解存在于较浅层次的情况,因为它可以逐层遍历整个问题空间,找到最短
路径。 • 深度优先搜索适用于问题空间较小、解存在于较深层次的情况,因为它可以尽可能深地搜索树的分支,找到更
启发式信息获取途径
01
02
03
问题自身的特性
通过分析问题的性质、结 构、约束条件等,提取出 对搜索过程有指导意义的 启发式信息。
领域知识
利用领域内的经验、规则、 常识等,为搜索过程提供 有价值的启发式信息。
搜索过程中的信息
在搜索过程中,通过评估 当前状态、已搜索路径、 未搜索路径等,动态地获 取启发式信息。
04 与或树搜索优化技术
剪枝策略
01
剪枝的定义和目的
剪枝是在搜索过程中,通过某些评估标准,提前终止对某些无意义或低
效的节点的扩展,以减少搜索空间,提高搜索效率。
02 03
常用剪枝策略
包括限界剪枝、启发式剪枝、概率剪枝等。限界剪枝通过设置上下界来 限制搜索范围;启发式剪枝利用启发式函数来评估节点的重要性;概率 剪枝则根据节点的概率分布来进行剪枝。
《人工智能》-第三章__确定性推理

感”。
15
3.1 推理的基本概念
3.1.1 推理的定义 3.1.2 推理方式及其分类 3.1.3 推理的方向 3.1.4 冲突消解策略
16
3.1.3 推理的方向
正向推理
逆向推理
推
(反 向 推 理 )
理
方
向
混合推理
双向推理
数据库 知识库
专家
推理机
用户
17
3.1.3 推理的方向
1. 正向推理
正向推理(事实驱动推理): 已知事实 → 结论
Powerpoint
人工智能
教材: 蔡自兴等《人工智能及其应用》(第4版) 清华大学出版社,2010. 5
第 3 章 确定性推理方法
❖ 3.1 推理的基本概念 ❖ 3.2 自然演绎推理 ❖ 3.3 谓词公式化为子句集的方法 ❖ 3.4 鲁宾逊归结原理 ❖ 3.5 归结反演 ❖ 3.6 应用归结反演求解问题 ❖ 3.7 盲目搜索 ❖ 3.8 产生式系统 ❖ 3.9 启发式搜索 ❖ 3.10 非单调推理 ❖ 3.11 消解原理
利用逆向推理中得到的信息进行正向推理,以推出更多的结论。
24
25
26
3.1.3 推理的方向
4. 双向推理
双向推理:正向推理与逆向推理同时进行,且在推理过 程中的某一步骤上“碰头”的一种推理。
中间结论
已知事实 正向推理 证
反向推理 假设目标 据
27
3.1 推理的基本概念
3.1.1 推理的定义 3.1.2 推理方式及其分类 3.1.3 推理的方向 3.1.4 冲突消解策略
P(x) Q(x), P(x, f (x)) Q(x, g(x))
❖ 空子句(NIL):不包含任何文字的子句。
人工智能原理及应用第3章 确定性推理方法

3.1 推理概述
3.1.2 推理的方法
1.演绎推理: 例:有如下三个判断: ①计算机系的学生都会编程序;(一般性知识) ②程强是计算机系的一位学生;(具体情况) ③因此程强会编程序。(结论)
这是一个三段论推理。其中:“①计算机系的学生都会编程序” 是大前提,“②程强是计算机系的一位学生”是小前提,那么“③ 程强会编程序”是经演绎推出来的结论。其结论蕴含在大前提中, 这就是典型的演绎推理三段论。
N
Y Y
以正向推理结果为假设
输入进行反向推理
N
输出结果
Y
成功退出
需要进行正向推理吗?
3.1 推理概述
3.1.4 推理中的冲突
在推理过程中,系统要不断地用数据库中的事实与知识库中的 规则进行匹配,当有一个以上规则的条件部分和当前数据库相匹配 时,就需要有一种策略来决定首先使用哪一条规则,这就是冲突解 决策略。冲突解决策略实际上就是确定规则的启用顺序。
33演绎推理方法332演绎推理的特点正向演绎推理逆向演绎推理问题求解的描述事实文字与或形事实文字合取式规则lw规则wl目标文字析取形目标文字与或形初始与或图相应于事实表达式事实表达式的与或树相应于目标公式事实表达式的与或树演绎推理f规则事实目标b规则目标事实结束条件包含所有目标节点的一致解图以事实节点作为所有终节点的一致解图34归结推理方法341子句集及其化简342herbrand海伯伦定理343robinson鲁宾逊归结原理344利用归结推理进行定理证明345应用归结原理进行问题求解在谓词演算中利用前面列出的等价式和永真蕴含式可以从已知的一些公式推导出新的公式这个导出的公式叫做定理在推导过程中使用的推理规则序列就成了该定理的一个证明而这种推导就是归结推理方法
形成可用知识集
人工智能---确定性推理

人工智能之确定性推理科目:人工智能_______班级:计算机科学与技术姓名:王兴德学号:1120070521指导教师:丁红发时间:2012月10年28日前言随着科学技术的飞快发展,如今中国的人工智能已经有所发展,越来越多的人在对智能化方面的要求越来越高。
但是同时也会给人们带来一些问题:人工智能是否能够提供方便快捷的服务来满足人们的需求?如今在中国的大部分地方还是用传统的方式来为人们服务的,人工智能才刚刚萌芽。
这样,就给国家的发展,人们生活水平的提高带来了很大的麻烦,浪费大量的时间和资源,这样的效率怎能不叫人遗憾?所以研究人工智能,并且使其为我们服务,成了当务之急。
何谓人工智能,什么是人工智能的确定性推理,未来的人工智能又向哪方面发展等等诸多问题,于是,成了我们研究人工智能的必须掌握的基本知识。
在以下的叙述中,我将给读者详细的介绍有关人工智能的知识,让读者对人工智能有基本的了解。
关键词:人工智能;科技;确定性推理;正向演绎推理等。
目录一何谓人工智能 (3)二推理技术概述 4 三推理的控制策略 6 四基于演绎规则的推理 7 五正向演绎推理实例 9 六反向演绎推理 10 七反向演绎推理实例 10 八总结 11 九参考文献 11一何谓人工智能?人工智能是用计算机来模拟人的智能,就是用能在计算机上实现的技术和方法来模拟人的思维规律和过程。
•1) 在确定知识表达方法后,就可以把知识表示出来并存储到计算机中。
•2) 然后, 利用知识进行推理以求得问题的解.•3)利用知识进行推理是知识利用的基础。
各种人工智能应用领域如专家系统、智能机器人、模式识别、自然语言理解等都是利用知识进行广义问题求解的智能系统.二推理技术概述:推理的概念与类型。
1)推理是人类求解问题的主要思维方法.2)所谓推理就是按照某种策略从已有事实和知识推出结论的过程。
推理是由程序实现的,称为推理机。
3)人类的智能活动有多种思维方式,人工智能作为对人类智能的模拟,相应地也有多种推理方式。
人工智能确定性推理部分参考答案

确定性推理部分参考答案1 判断下列公式是否为可合一,若可合一,则求出其最一般合一。
(1) P(a, b), P(x, y)(2) P(f(x), b), P(y, z)(3) P(f(x), y), P(y, f(b))(4) P(f(y), y, x), P(x, f(a), f(b))(5) P(x, y), P(y, x)解:(1) 可合一,其最一般和一为:σ={a/x, b/y}。
(2) 可合一,其最一般和一为:σ={y/f(x), b/z}。
(3) 可合一,其最一般和一为:σ={ f(b)/y, b/x}。
(4) 不可合一。
(5) 可合一,其最一般和一为:σ={ y/x}。
2 把下列谓词公式化成子句集:(1)(∀x)(∀y)(P(x, y)∧Q(x, y))(2)(∀x)(∀y)(P(x, y)→Q(x, y))(3)(∀x)(∃y)(P(x, y)∨(Q(x, y)→R(x, y)))(4)(∀x) (∀y) (∃z)(P(x, y)→Q(x, y)∨R(x, z))解:(1) 由于(∀x)(∀y)(P(x, y)∧Q(x, y))已经是Skolem标准型,且P(x, y)∧Q(x, y)已经是合取范式,所以可直接消去全称量词、合取词,得{ P(x, y), Q(x, y)}再进行变元换名得子句集:S={ P(x, y), Q(u, v)}(2) 对谓词公式(∀x)(∀y)(P(x, y)→Q(x, y)),先消去连接词“→”得:(∀x)(∀y)(¬P(x, y)∨Q(x, y))此公式已为Skolem标准型。
再消去全称量词得子句集:S={¬P(x, y)∨Q(x, y)}(3) 对谓词公式(∀x)(∃y)(P(x, y)∨(Q(x, y)→R(x, y))),先消去连接词“→”得:(∀x)(∃y)(P(x, y)∨(¬Q(x, y)∨R(x, y)))此公式已为前束范式。
南邮自动化人工智能2--知识表示方法

问题的表示 求解的方法
状态空间法(State Space Representation):
状态空间法就是用来表示问题及其搜索过程的一种方法。它是 人工智能中最基本的形式化方法,用“状态(state)”和“算 符(operator)”来表示问题。
南京邮电大学
规则知识:是有关问题中与事物的行动、动作相联系的因 果关系知识,是动态的,常以“如果…那么…” 形式出现。
南京邮电大学
三、人工智能系统中的知识
控制知识:是有关问题的求解步骤、技巧的知识,告诉人 们怎么做一件事,也包括当有多个动作同时被激活时应选 哪一个动作来执行的知识。控制知识常与程序结合在一起 出现,如一个问题求解的算法可以看做是一种知识表示。
如何把初试棋局 变成目标棋局?
11
1 7 5
9
4
3 8
15
12 6
11
1 7 13
9
3 5 2 4 8 10
15
12 6 14
11
1 7 13
4
12 8 10
15
6 14
11
1 7 13
9
3 5 2
4
8 10
15
12 6 14
13
2
10
14
再把另一些适用算符 用于这些新的状态; 这样继续下去,直至 产生目标状态为止
(c,1,c,0)
grasp
U=V
(c,1,c,1) 目标状态
南京邮电大学
小结
什么是知识 知识的划分 人工智能系统中的知识 什么是知识表示 状态空间法
南京邮电大学
南京邮电大学
内容提要
第二章:知识表示方法
人工智能4不确定性推理

模糊集上的运算主要有:包含、交、并、补等等。
1. 包含运算
定义4.5 设A,B∈F(U),若对任意u∈U,都有
μB(u)≤μA(u) 成立,则称A包含B,记为B A。 2. 交、并、补运算
定义4.6 设A,B∈F(U),以下为扎德算子
A
B : A
B (u)
max{ uU
A
(u
),
B
(u)}
A (u) B (u)
3
模糊集的表示方法(1)
若论域离散且有限,则模糊集A可表示为:
也可写为:
A={μA(u1),μA(u2),…,μA(un)}
或者:
A=μA(u1)/u1+μA(u2)/u2+…+μA(un)/un
n
n
A (u ) / u , 或者A (u ) / u
Ai
i
Ai
i
i 1
i 1
A={μA(u1)/u1,μA(u2)/u2,…,μA(un)/un} A={(μA(u1),u1),(μA(u2),u2),…,(μA(un),un)} 隶属度为0的元素可以不写。
(A, B) 1 [1 (1 0.2)] 0.9 2
即A和B两个模糊集之间的匹配度为0.9。
21
语义距离
如果论域U上两个模糊集A和B的语义距离为d(A,B),则其匹配度为 1-d(A,B)。
曼哈顿距离(Manhattan Distance)或者海明距离(Hamming
Distance)
d (A, B)
A
•
B
{
U
A
(ui
)
B
(ui
)}
A⊙
B
{
人工智能自动推理

路* 漫漫其悠远
4
推理方式及其分类
在任何情况下,由演绎推导出的结论都是蕴涵在大前提 的一般性知识中
只要大前提和小前提是正确的,则由它们推出的结论必 然是正确的
(2) 归纳推理
▪ 归纳推理是从足够多的事例中归纳出一般性结论的推理
过程,是一种从个别到一般的推理
▪ 归纳推理:完全归纳推理、不完全归纳推理 ▪ 完全归纳推理是在进行归纳时考察了相应事物的全部对
人工智能自动推理
路漫漫其悠远
2020/4/3
4.1 引 言
路* 漫漫其悠远
2
什么是推理
推理就是按某种策略由已知判断推出另一判断 的思维过程
已知判断:包括已掌握的与求解问题有关的知 识及关于问题的已知事实 推理的结论:由已知判断推出新判断
推理由程序程序实现,称为推理机
路* 漫漫其悠远
3
推理方式及其分类
先逆向再正向,先假设一个目标进行逆向推理,然后 再利用逆向推理中得到的信息进行正向推理,以推出 更多的结论
路* 漫漫其悠远
12
推理的控制策略
④ 双向推理
▪ 双向推理是指正向推理与逆向推理同时进行
,且在推理过程中的某一步骤上“碰头”的一 种推理。
▪ 正向推理所得的中间结论恰好是逆向推理此
时要求的证据 2、求解策略
① 正向推理 正向推理是从初始状态出发,使用规则
,到达目标状态。又称为数据驱动推理、前 向链推理、模式制导推理及前件推理。 ② 逆向推理
逆向推理是以某个假设目标为出发点的 一种推理,又称为目标驱动推理、逆向链推 理、目标制导推理及后件推理
路* 漫漫其悠远
10
正、逆向推理比较
项 目 正向推理
人工智能第3章(确定性推理1-图盲目搜索)
1 3
2
1 7
4
3
4 5
2
1 7 8 6
3
4 5
8
6
3
4 5
2
1 7
8
4 6
3
5
8 2 1
3 4
2 7
8 1
3 4 1
2 8
3 4
2 1
3 8 4
2 1
8 6
3 4
2 1
8 6
3 4
2 1
8 4 3
2 1
8 4
3 5765来自657
6
5
7
6
5
7
5
7
5
7
6
5
7
6
8 2 7 1 6
3 4 5
2 7 6
8 1
13
14
1
4
2
8
8
3
3
0
1
2
4
1
5
4
7
7
0
6
6
5
1 8
7
2
3 4
14 15 15
16 16
3 2 4
3 4
8 2 2
1 1
1 8 8
2 2
3 3 3
3 3
2 7 7
7 8
0 0 1
8 0
4 4 4
4 4
7 6 6
0 7
6 1 5
6 6
5 5 0
5 5
6
5
目标节点
最后的CLOSED表:
1 2 3 4 5 6 7 8 9
(6,90)
人
3
宽度优先搜索算法
人工智能在信息科学中的推理与逻辑推断
人工智能在信息科学中的推理与逻辑推断近年来,人工智能的快速发展引起了广泛的关注和讨论。
人工智能的核心是模拟和超越人类的智能思维和行为,其中推理与逻辑推断是不可或缺的重要组成部分。
在信息科学领域中,人工智能的推理与逻辑推断应用广泛,为信息处理与决策提供了有效的方法和工具。
一、人工智能的推理与逻辑推断的基本原理人工智能的推理与逻辑推断是通过建立逻辑模型和推理机制来实现的。
首先,人工智能系统通过学习和分析大量的数据和知识,从中抽取出相关的特征和规律,并形成一个逻辑模型。
这个逻辑模型可以是一组规则、一张决策树,或者是一个统计模型。
然后,通过建立推理机制,根据逻辑模型中的规则和条件,对输入数据进行推理和推断,得出相应的结论和决策。
推理与逻辑推断的基本原理可以归结为三个要素:知识表示、推理规则和推理机制。
知识表示是人工智能系统对外界事物的认识和理解,它是推理与逻辑推断的基础。
推理规则是人工智能系统对知识进行归纳、演绎和推测的基本方法,它是推理与逻辑推断的核心。
推理机制是人工智能系统对输入数据进行处理和分析的方法和手段,它负责将知识表示和推理规则结合起来,实现对输入数据的推理和推断。
二、人工智能的推理与逻辑推断在信息科学中的应用在信息科学领域中,人工智能的推理与逻辑推断应用广泛,涉及到文本处理、语音识别、图像处理、数据分析等多个方面。
首先,人工智能的推理与逻辑推断在文本处理中起到了重要的作用。
通过对大量的文本数据进行深层次的分析和理解,人工智能系统可以识别出文本中的关键信息和主题,为信息的提取和分类提供有效的方法和工具。
例如,在信息检索系统中,人工智能系统可以利用推理与逻辑推断的方法,根据用户的查询意图和特定的上下文信息,准确地找到与用户需求相匹配的文本内容。
其次,人工智能的推理与逻辑推断在语音识别中起到了重要的作用。
通过对不同语音信号的解析和分析,人工智能系统可以识别出具体的语音内容和意义。
推理和逻辑推断可以帮助系统更好地理解语音中的隐含信息和推断用户的意图。
人工智能不确定推理方法

人工智能不确定推理方法
人工智能是21世纪非常活跃的研究领域,来自不同领域的人们正在
努力开发有效的、可用的技术和算法,以便在特定的应用中实现无缝的人
机交互。
人工智能的一个重要属性是不确定性,以实现不确定环境中的智
能决策。
不确定性可能来自可能会存在不确定性的可用信息,取决于变量
的多样性,或者来自可能会以未知方式变化的环境,或者两者都有。
在实
现人工智能的不确定推理方法中,概率推理和深度学习是两个重要的方法。
概率推理是一种不确定性推理方法,它利用来自多种源的不确定性数据,建立一个概率模型,以对未知结果和未知事件进行预测。
概率推理的
基本原理是基于一代以上随机事件发生的概率,对事件发生的可能性建立
概率模型,从而推断未知的预测结果。
概率模型是一个概率函数,它根据
可能的输入变量,返回可能的输出变量。
在这种模型中,概率函数可以根
据输入变量建立概率模型,从而对未知结果进行预测。
深度学习是一种更加复杂的人工智能不确定推理方法,它采用多层神
经网络来实现不确定推理。
深度学习的基本思想是使用多层神经元网络来
分析和实现不确定性的推理。
南邮专业面试
1.计算一个组合数学,概率论的题目2.通信常用调制方式3.同步原理的四种形式(载波同步,位同步,网同步,群同步)4.纠错编码的常用格式前向纠错,反向重发的过程(前向纠错:发端发送能够纠正错误的码,接收端收到解码之后,不仅可以发现错误,而且能够判断错误码元所在的位置,并自动纠正。
机、手机等)。
)反向重发:5.信道编码的两种形式分组码和卷积码分组码包括线性分组码循环码卷积码是非线性分组码6.光纤通信的原理光纤通信的原理是:在发送端首先要把传送的信息(如话音)变成电信号,然后调制到激光器发出的激光束上,使光的强度随电信号的幅度(频率)变化而变化,并通过光纤发送出去;在接收端,检测器收到光信号后把它变换成电信号,经解调后恢复原信息。
和OFDM的效率以及优缺点QPSK优点有调制效率高,传输的频带利用率高,要求传送途径的信噪比低缺点其存在相位突变。
在频带受限的系统中会引起包络得很大起伏OFDM 优点( 1 ) 具有非常高的频谱利用率( 2 ) 实现比较简单( 3 ) 抗多径干扰能力强,抗衰落能力强( 4 ) 带宽扩展性强(5)频谱资源灵便分配( 6 ) 实现 MIMO 技术较简单缺点( 1 )对频偏和相位噪声比较敏感( 2 )存在较高的峰均功率比(PAPR)8.人脸识别过程中的检测算法9.如何提高频谱利用率进行信源编码,使用多载波技术, ofdm 技术就是提高频谱利用率的, tdma 也可以提高频谱利用率,等等技术10.串口通信的几种形式最被人们熟悉的串行通信技术标准是 EIA- 232、EIA-422 和 EIA- 485,也就是以前所称的RS-232、RS-422 和RS-485。
由于 EIA 提出的建议标准都是以“RS”作为前缀,所以在工业通信领域,仍然习惯将上述标准以 RS 作前缀称谓。
的意思WLAN 是 Wireless Local Area Network 的缩写,即无线局域网,其特点是再也不使用通信电缆将计算机与网络连接起来,而是通过无线的方式连接,普通用在同一座建造内,如果加装天线,覆盖范围可以达到 5 公里。
基于人工智能的自动化推理机制研究

基于人工智能的自动化推理机制研究人工智能(Artificial Intelligence,简称AI)作为一门涉及计算机科学、认知科学、心理学等多个领域的交叉学科,一直以来都备受关注。
随着技术的不断进步,人工智能在各个领域都展现出了巨大的潜力。
其中,基于人工智能的自动化推理机制研究是一个备受关注的热点话题。
本文将从多个角度来探讨这一话题。
首先,我们需要明确什么是自动化推理机制。
在人工智能领域中,自动化推理机制是指通过计算机程序模拟人类思维过程中的推理过程,并以此为基础进行问题求解和决策。
这种机制通过模拟和分析大量的数据和知识,并运用各种逻辑和算法来进行思维推断,从而实现类似于人类思维过程中所具备的逻辑性、灵活性和创造性。
在过去几十年里,随着计算能力不断提升和数据量不断增加,基于人工智能的自动化推理机制得到了长足发展。
从最早的专家系统到如今的深度学习,自动化推理机制已经在多个领域取得了重要的应用成果。
例如,在医学领域,基于人工智能的自动化推理机制已经被用于辅助医生进行诊断和治疗决策。
在金融领域,自动化推理机制被应用于风险评估和投资决策。
在交通领域,自动化推理机制被用于优化交通流量和规划路线等方面。
然而,基于人工智能的自动化推理机制研究仍然面临着一些挑战。
首先是数据和知识的获取与处理问题。
要实现有效的自动化推理,需要大量准确、全面、结构化的数据和知识作为输入。
然而,在现实世界中获取这些数据和知识并进行处理仍然是一个困难重重的任务。
其次是算法与模型设计问题。
虽然深度学习等技术已经取得了一定成果,但仍然存在一些问题需要解决,例如模型解释性不强、泛化能力不足等。
为了解决这些问题,研究者们正在积极探索各种新方法和新技术。
一方面,他们致力于改进数据和知识的获取与处理技术。
例如,利用自然语言处理技术从互联网上抓取和处理大规模的文本数据,或者通过知识图谱等方式来获取结构化的知识。
另一方面,他们也在不断改进算法与模型设计。
南邮自动化人工智能3确定性推理

南邮自动化人工智能3确定性推理
3.2 盲目搜索
• 盲目搜索又叫做无信息搜索,一般只适用于求解比较 简单的问题。
– 特点:不需重排OPEN表; – 种类:宽度优先、深度优先、等代价搜索等。
3.2.1 宽度优先搜索(Breadth-first)
❖ 定义:
以接近起始节点的程度逐层扩展节点的搜索方法。
扩展节点表中。 • 4)扩展节点n。如果没有后继节点,则转向上述第(2)步。 • 5)把n的所有后继节点放到OPEN表的末端,并提供从这些后继
节点回到n的指针。 • 6)如果n的任一个后继节点是个目标节点,则找到一个解答,
成功退出;否则转向第(2)步。
南邮自动化人工智能3确定性推理
开始
3.2 盲目搜索
宽度优先算法
• Procedrue breadth-First-Search
• 1 G=G0(G0=s),open=(s),closed=() //s:初始 状态
• 2 Loop: if open=() then exit(fall)
• 3 n←first(open)
• 4 if goal(n) then exit(success)
3.2.3 等代价搜索
3.2 盲目搜索
❖ 定义
是宽度优先搜索的一种推广,不是沿着等长度路径 断层进行扩展,而是沿着等代价路径断层进行扩展。
搜索树中每条连接弧线上的有关代价,表示时间、
距离等花费。
❖ 算法
在等价搜索算法中,把从节点i到其后续节点j的连
接弧线记为c(I,j),把从起始节点S到任一节点I的路径代
• 2 Loop:if open=() then exit(fall)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
猴子和香蕉问题的状态空间图
提问:人工搜索求解的解答?
4
3.1 图搜索策略
猴子和香蕉问题自动演示:
•
香蕉
Ha!Ha!
箱子
猴子
思考:计算机的搜索策略?
5
3.1 图搜索策略
• 图搜索控制策略:一种在图中寻找路径的方法。
图中每个节点对应一个状态; 每条连线对应一个操作符。
• 图搜索过程(GraphSearch)
第三章 搜索推理技术
问题:知识表示有那些方法?知识表示的目的是
什么?构建智能系统的关键是什么?
3.1 图搜索策略 3.2 盲目搜索 3.3 启发式搜索 3.4 消解原理 3.5 规则演绎系统
3.6 产生式系统 3.7非单调推理 3.8小结
1
3.1 图搜索策略
• 思考:状态空间法的基本特点?基本推理方法?其 求解结果是什么?简单回顾实例:猴子与香蕉。
2018/10/12 29
3.2 盲目搜索
示范:有界深度(4)优先的八数码问题深度优先 搜索树?
2 1 7 8 6 3 4 5 1 8 7 2 6 3 4 5
(初始状态)
(目标状态)
30
3.2 盲目搜索
31
• 讨论1:如果问题有解,用深度优先搜索算 法,是否能够找到解? • 不一定. 解空间是否有限?
19
2018/10/12
•
标记每个到n节点指针,按照节点深度递 增顺序排列open中的节点 • 8 go loop • 理论上可以利用宽度优先搜索能够找到解, 如果问题有解的话。
• 讨论:宽度优先算法和深度优先算法可能 出现组合爆炸。都没有利用任何启发式信 息,所以称为无信息搜索策略。
2018/10/12 20
8
3.1 图搜索策略
• 6)扩展节点n,同时生成不是n的祖先的那些后继节点的 集合M。把M的这些成员作为n的后继节点添入图G中。 • 7)对那些未曾在G中出现过的M成员设置一个通向n的指 针。把M的这些成员加进OPEN表。对已经在OPEN或 CLOSED表上的每一个M成员,确定是否需更改通到n的指 针方向。对已在CLOSED表上的每个M成员,确定是否需 要更改图G中通向它的每个后裔节点的指针方向。 • 8)按某一任意方式或按某个探试值,重排OPEN表。 • 9)GO LOOP。
9
图搜索策略
• 图搜索的实质是从问题空间中找出一张包含目标节点的子 图。 • 图搜索的结果:1,一个完整的搜索图G。2一个解路径,用 指针表示的解路径。 • Procedure Graph Search • 1 G=G0(G0=s),open=(s) //s:初始状态 • 2 closed=() • 3Loop:if open=() then exit(fall) • 4 n←first(open) remove(n,open), add(n,closed) • 5 if goal(n) then exit(success) • 6{mj} ←expand(n), //mj不含n的先辈节点 • 7 open←add(open,mj) // mj不在open,closed中
6
开始
3.1 图搜索策略
(1) (3)
把S放入OPEN表
(4)
是 OPEN表为空表? 失败 否 把第一个节点(n)从OPEN表移至CLOSED表
(5) (6) (7)
n为目标节点吗?
是
成功
否 把n的后继节点放入OPEN表的 末端,提供返回节点n的指针
(7) (9) (8)
(1)
修改指针方向
重排OPEN表 图3.1 图搜索过程框图 宽度优先
goto(U)
(U,0,Y,z) (V,0,V,z) (W,1,W,z)
pushbox(V)
climbbox
grasp
( c, 1 , c, 1 )
3
3.1 图搜索策略
goto(U)
( a , 0 , b, 0 ) goto(U) ( U , 0 , b, 0 )
U=b, pushbox(V) U=b,climbbox pushbox(V) V≠c,climbbox ( V, 0, V, 0) V=c,climbbox (c,1,c,0) goto(U) ( U, 0, V, 0) goto(U) (c,1,c,1) 目标状态 (b,1,b,0)
2018/10/12
13
3.1 图搜索策略
• 思考:
– – – – (1)结果路径的形成中,为什么其节点顺序是明确的? (2)OPEN表中的节点具有什么特点? (3)CLOSED表中的节点具有什么特点? (4)对OPEN表节点的排序有何意义?
• 提出:盲目搜索与启发式搜索。
14
3.2
盲目搜索
• 盲目搜索又叫做无信息搜索,一般只适用于求解比较 简单的问题。
– 特点:不需重排OPEN表; – 种类:宽度优先、深度优先、等代价搜索等。
3.2.1 宽度优先搜索(Breadth-first)
定义:
以接近起始节点的程度逐层扩展节点的搜索方法。
特点:
一种高代价搜索,但若有解存在,则必能找到它。
15
宽度优先搜索示意图
S
L M N F
16
O F P F Q F
(2)
OPEN CLOSED
7
3.1 图搜索策略
图搜索的一般过程如下:
• 1)建立一个只含有起始节点S的搜索图G,把S放到 一个叫做OPEN 的未扩展节点表中。 • 2)建立一个叫做CLOSED的已扩展节点表,其初始为 空表.
• 3)LOOP:若OPEN表是空表,则失败退出。
• 4)选择OPEN表上的第一个节点,把它从OPEN表移 出并放进CLOSED表中。称此节点为节点n • 5)若n为一目标节点,则有解并成功退出,此解是 追踪图G中沿着指针从n到S这条路径而得到的(指针将 在第7步中设置)。
2
3.1 图搜索策略
• 用一个四元表列(W,x,Y,z)表示这个问题状态
– – – – W 猴子的水平位置 x 当猴子在箱子顶上时取 x = 1;否则取 x = 0 Y 箱子的水平位置 z 当猴子摘到香蕉时取 z=1;否则取 z=0
• 算符:
– Goto(U),
• (W,0,Y,z) – Pushbox(V), • (W,0,W,z) – Climbbox, • (W,0,W,z) – Grasp, • ( c , 1 , c, 0 )
7 6
5
7 6
5
(初始状态)
(目标状态)
规定:将牌移入空格的顺序为:从空格左边 开始顺时针旋转。不许斜向移动,也不返回 先辈节点。从图可见,要扩展26个节点,共 生成46个节点之后才求得解(目标节点)。
24
3.2 盲目搜索
25
3.2 盲目搜索
3.2.2 深度优先搜索(Dephth-first)
定义:
把S放入OPEN表
OPEN表为空表?
是
失败
否 把第一个节点(n)从OPEN表移至CLOSED表 节点n的深度等于最大深度? 否
扩展n,把n的后继节点放入OPEN 表的前端,提供返回节点n的指针
是 是否有后继节点 成功 为目标节点? 否 图3.6 深度优先算法框图
28
深度优先算法
• • • • • • • • • Procedrue depth-First-Search 1 G=G0(G0=s),open=(s),closed=() //s:初始状态 2 Loop:if open=() then exit(fall) 3 n←first(open) 4 if goal(n) then exit(success) 5remove(n,open), add(n,closed) 6{mj} ←expand(n), //mj不含n的先辈节点 7 open←add(open,mj) // mj不在open,closed中 标记mj每个到n节点指针,按照节点深度递减顺 序排列open中的节点 • 8 go loop
首先扩展最新产生的(即最深的)节点。
特点: 防止搜索过程沿着无益的路径扩展下去,往往给 出一个节点扩展的最大深度——深度界限。
与宽度优先搜索算法最根本的不同在于:将扩展 的后继节点放在OPEN表的前端。
26
3.2 盲目搜索
深度优先搜索示意图
S
L M N F
27
O F P F Q F
3.2 盲目搜索 开始
:
• 宽度优先例题: • 由一张桌子T、三个积木A、B、C组成一个 积木世界,初始状态是A在B上,B在桌子上, C在桌子上;目标状态是:A、B、C依次从 上到下排列在桌子上。如图
2018/10/12
21
• 解:1)状态描述(P1,P2,P3)表示按A、 B、C顺序依次分别在P1,P2,P3上其中Pi是积 木或者桌子。初始状态时(B、T、T),目标 状态 可以表示(B、C、T) • 2)定义操作:move(x,y)表示将积木x移到Y 上 ; • 约束条件:a X顶部必须是空的 b 如果Y是积 木,Y的顶部必须是空的 • c 同一种状态出现不得多于一次。
是 是否有后继节点 成功 为目标节点? 否 图3.2 宽度优先算法框图
思考:与原始算法比较异同,宽度优先的体现?
18
宽度优先算法
• • • • • • • • Procedrue breadth-First-Search 1 G=G0(G0=s),open=(s),closed=() //s:初始状态 2 Loop: if open=() then exit(fall) 3 n←first(open) 4 if goal(n) then exit(success) 5remove(n,open), add(n,closed) 6{mj} ←expand(n), //mj不含n的先辈节点 7 open←add(open,mj) // mj不在open,closed 中