伯德图在随动系统的动态性能分析中的应用
自动控制系统校正方法介绍

采用比例校正,以适当降低系统的增益。于是可在前向通路 中,串联一个比例调节器。并使Kc=0.5。这样,系统的开环增 益为:
不难看出,降低系统增益后: ①使系统的相对稳定性改善,超调量下降,振荡次数减少。 ②使穿超频率降低,这意味首调整时间增加,系统快速性 变差。 ③增益降低为原来的1/2,则比随动系统的速度限随稳态误 差将增大一倍,系统的稳态精度变差。
以上分析表明,比例微分环节与系统固有部分的大惯 性环节的作用相消了。这样,系统由原来的一个积他和二 个惯性环节变成一个积分和一个惯性环节。
其Wc=13.2 r 13.5。 取Kc=1,所以其低频渐近线为 零分贝线。频渐近线为+20dB/dec斜直线,其交点(交接 频率)为w=1/τ=1/0.2=5rad/s。其相位曲线为0→+90的曲 线(相位超前)。此为稳定系统。此时w1=35rad/s。
图7 校正前仿真图
图8 校正后仿真图
Matlab程序图: 未校正前的程序: num1=35;den1=[0.002 0.21 1 0]; margin(num1,den1) 校正后的程序: num2=35;den2=[0.002 0.21 1]; margin(num2,den2)
图9 校正前伯德图
图2校正前伯德图2校正前伯德图3校正后伯德图图3校正后伯德图图4校正前施加阶跃信号图图5校正后施加阶跃信号图综上所述降低增益将使系统的稳定改改善但使系统的快速性和稳态精度变差
自动控制系统校正
校正的分类
根据校正装置在系统中所处地位的不同反馈校正、顺馈校 正和串联校正。 (1)反馈校正 根据是否经过微分环节,又分为软校正和硬校正。 (2) 顺馈校正 根据补偿采样源的不同,又可分为给定顺馈校正和扰动顺 馈校正。 (3) 串联校正 根据校正环节对系统开环频率特性相位的影响,又可分为 相位超前校正、相位滞后校正和相位超前-滞后校正。
Bode 图法控制系统设计---串联滞后校正
重庆交通大学《自动控制》课程设计课题:三、Bode 图法控制系统设计---串联滞后校正作者:学号:专业:班级:指导教师:2013.06.28摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,而自动控制理论是自动控制科学的核心。
自动控制理论自至今已经过了三代的发展。
现代控制理论已广泛应用于制造业、农业、交通、航空及航天等众多产业部门。
自动控制理论从线性近似到非线性系统的研究取得了新的成就,借助微分几何的固有非线性框架来研究非线性系统的控制,已成为目前重要研究方向之一。
在控制技术需求推动下,控制理论本身也取得了显著进步。
为了实现各种复杂的控制任务首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机整体,这就是自动控制系统。
本次课程设计是利用滞后-超前校正网络来校正系统以改善系统性能,首先应该根据原有系统和初始条件要求来确定校正系统,然后利用MATLAB分析校正后的系统是否达到要求以及其性能。
关键字:自动控制 MATLAB 滞后-超前校正系统分析目录前言 (2)一、设计任务 (5)1、设计要求 (5)2、设计方案分析 (5)3、控制器的MATLAB程序实现 (6)二、控制系统的模拟化设计 (7)1、模拟控制器的离散化 (7)A、冲激不变法 (7)B、加零阶保持器的Z变换法 (8)C、差分变换法 (8)D、双线性变换法 (8)E、频率预畸变双线性变换法 (9)2、控制器的MATLAB离散程序 (9)3、控制器的计算机实现 (9)A、直接程序设计法 (9)B、串行程序法 (10)C、并行程序法 (11)D、控制器的计算机实现流程图 (11)三、控制系统的MATLAB实现 (12)1、控制系统的MATLAB仿真 (12)2、控制系统的simulink仿真 (13)四、小结 (14)五、参考文献 (15)一、设计任务Bode 图法控制系统设计---串联滞后校正设被控对象的传递函数为1、设计要求(1)开环增益Kv=20(2)频率裕量γ=70°(3)对此控制器进行离散化,并用计算机程序实现(划出流程图)(4)用Matlab 对系统进行仿真,分析系统的阶跃响应2、设计方案分析系统要求使用Bode 图法对控制系统进行设计,同时要求采用串联滞后校正。
第六课-系统Bode图及Nyquist曲线的绘制及稳定性分析

实验六 系统Bode 图及Nyquist 曲线的绘制及稳定性分析一、 教学目的(1) 加深了解系统及元件频率特性的物理概念。
(2) 进一步加深对Bode 图及Nyquist 曲线的了解。
(3) 熟练掌握用MATLAB 分析系统频率特性的方法。
二、 教学内容(1) 设计一阶惯性环节12.01)(+=s s G 模拟电路,并完成频率特性曲线测试。
参考程序:s=tf('s');G=1/(0.2*s+1);figure(1)nyquist(G)figure(2)bode(G)说明: ● 命令nyquist()用来绘制系统的nyquist 曲线(开环幅相曲线)。
调用格式为 nyquist(sys)nyquist(sys,w)[re,im,w]=nyquist(sys)其中,sys 为系统开环传递函数模型,第一种格式频率向量w 自动给定,第二种格式频率向量由人工给定,第三种格式不作图,返回变量re 为G(jw)的实部向量,im 仍为G(jw)的虚部向量,w 为频率向量。
● 函数bode()用来绘制系统的Bode 图,调用格式为:bode(sys)bode(sys,w)[m,p,w]=bode(sys)其中,sys 为系统开环传递函数模型,第一种格式频率向量w 自动给定,第二种格式w 由人工给定,可由命令logspace()得到对数等分的w 值。
第三种格式不作图,返回变量m 为幅值向量,p 为相位向量,w 为频率向量。
(2) 系统的模拟电路原理图及系统的结构框图如图所示,① 求系统传递函数。
取R2=500K Ω,经计算得系统的传递函数为: 500100500)(2++=s s s G ② 作出系统开环对数幅频特性、相频特性,求出相应的频域性能指标。
参考程序:num=[500];den=[1 10 500];sys=tf(num,den);bode(sys)[h,r,wg,wc]=margin(sys)说明:margin()用来求系统的频率特性参数,调用格式为:[h,r,wg,wc]=margin(sys)③在图中作近似折线特性,并与原准确特性相比较。
BODE图的讲解

§5.7 利用闭环频率特性分析系统的性能
共二十三页
§5.3
对数(duì shù)频率特性 ( Bode )
Bode图介绍
(jièshào)
共二十三页
§5.3
对数(duì shù)频率特性 ( Bode)(2)
Bode图介绍(jièshào)
横轴 按 lg 刻度,dec “十倍频程”
绘制开环系统(xìtǒng)Bode图的 步骤
⑴ 化G(j)为尾1标准型
⑵ 顺序列出转折频率
例1
G(s)
s(
40(s 0.5) 0.2)( s2 s 1)
100( s 1)
G(s)
0.5
s( s 1)(s2 s 1)
0.2
0.2 惯性环节
0.5 一阶复合微分
1 振荡环节
⑶ 确定低频特性
例1 根据(gēnjù)Bode图确定系统传递函数。
解. 依图有 G(s) K
Ts 1
30
20lg K 30 K 1020 31.6
转折频率 2 1 T T 0.5
G(s)
3.16 s 1
2
• Bode图与Nyquist图之间的对应(duìyìng)
关系: • 截止频率c:G( jc ) 1
最小转折频率之左 的特性或其延长线
基准点 ( 1, L(1) 20lg K ) 斜率 20 v dB dec
⑷ 叠加作图
一阶
二阶
惯性环节 -20dB/dec
复合微分 +20dB/dec
振荡环节 -40dB/dec
复合微分 +40dB/dec
共二十三页
0.2 惯性环节 -20
《典型环节伯德图》课件

稳定性分析
稳定性定义:系统 在受到扰动后能够 恢复到其原始状态 的能力
稳定性分类:稳定、 不稳定、临界稳定
稳定性分析方法: 伯德图分析、奈奎 斯特图分析、根轨 迹分析等
伯德图分析:通过绘制 伯德图,观察系统在不 同频率下的增益和相位 变化,判断系统的稳定 性。
动态性能分析
伯德图:描述系统动态性能的图形工具 频率响应:系统对不同频率信号的响应 相位裕度:系统稳定性的指标 增益裕度:系统放大能力的指标 动态性能分析方法:如根轨迹法、频率响应法等
MATLAB还提供了丰富的函数库,可以方便地进行各种数学计算和仿真。
Simulink软件介绍
软件名称: Simulink
开发商: MathWorks
公司
软件功能:用 于建模、仿真 和分析动态系
统
应用领域:广 泛应用于控制 工程、信号处 理、通信等领
域
软件特点:图 形化界面,易 于操作,支持 多种编程语言
软件版本:最 新版本为 Simulink 2022a
其他绘制软件介绍
AutoCAD:一款专业的CAD软件,可以绘制 各种类型的伯德图
SolidWorks:一款三维设计软件,可以绘制 伯德图
Inventor:一款三维设计软件,可以绘制伯 德图
SketchUp:一款三维设计软件,可以绘制伯 德图
Blender:一款三维设计软件,可以绘制伯德 图
幅频特性的分析
幅频特性的定义:描述信号在频率域上的分布特性 幅频特性的表示方法:通常采用伯德图或奈奎斯特图 幅频特性的应用:用于分析信号的频率响应、滤波器设计等 幅频特性的测量方法:通过频谱分析仪或示波器等仪器进行测量
相频特性的分析
相频特性的定义:描述信号频率与相位之间的关系 相频特性的表示方法:通常用相频特性曲线表示 相频特性的应用:在信号处理、通信等领域有广泛应用 相频特性的测量方法:通过实验或仿真进行测量
自动控制原理:第六章频域分析法——伯特图及稳定性分析
• 当阻尼系数接近1时,振荡环节具有低通滤波的作用; • 而随着减小,=n=1/T处的幅值迅速增大,表明其对输
入信号中该频率附近分量的放大作用逐渐加强,此时,振
荡环节具有选频作用。
6.4 系统开环频率特性-典型环节的伯德图
40
Bode Diagram
二阶微分环节:
30
20
转折频率 渐近线
L() /(dB)
10 /T
1) 将乘除运算转化为加减运算,因而可通过简单的图像叠加 快速绘制高阶系统的伯德图 ;如 G( j) A1()e j1() A2 ()e , j2 () 则20lgA1()A2()=20lgA1()+20lgA2()
2) 伯德图还可通过实验方法绘制,经分段直线近似整理后, 很容易得到实验对象的频率特性表达式或传递函数.
i 1
i m1 1
v n1
v n1 nv n1 2
( jTl 1)
(1 Tl2 2 2 j lTl )
l v 1
l v n1 1
(6 - 17)
其 中 ,K ,0 i 1,0 l 1, i 0,Tl 0都 为 常 数 。
除此外,也存在某个Tl<0,开环不稳定,但闭环可能仍然 稳定的情况。
1
A(ω)
1 ωT 2 2 2ζωT 2
L() /(dB)
10
0
-10 -20
(1 T 22
j2T)1
0.05 0.1 0.3
-30
0.7
1 -40
180
转折频率 渐近线
135
(ω)
arctan
1
2ζωT
ωT
2
90 45
0
() /()
控制系统的伯德图分析自动控制原理-理论篇第6节

PM ( c ) (180 ) 180 ( c )
c — 剪切频率,截止频率,增益穿越频率。
G(jc )H (jc ) 1 L(jc ) 0
增益裕量—Gain Margin(GM) 1 GM K g G(jg )H (jg )
GM b 20 lg G(jg )H (jg ) K gb
自动化工程学院自动控制原理课程组制
2015年11月
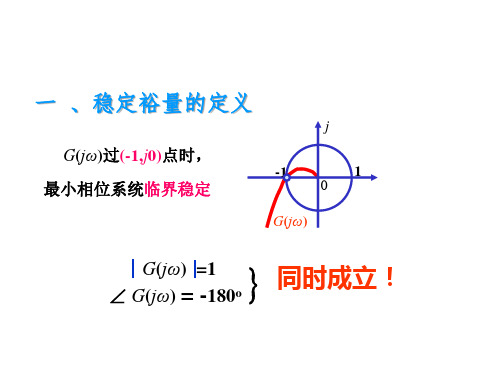
一 、稳定裕量的定义
j
G(jω)过(-1,j0)点时, 最小相位系统临界稳定
-1
G(jω)
0
1
G(jω) =1 ∠ G(jω) = -180o
同时成立!
K G(jωg) =1
G(jωg) -1 γ
ωg
∠G(jωc) – γ = –180o
幅值裕量 K=
K ( j ) 2 (Tj 1)
2 2
L ( ) 20 lg K 40 lg 20 lg T 1 0时有低频渐近线方程
L ( ) 20 lg K 40 lg 20 lg K a 40 lg
斜率=-40 db/dec,交点: 1 Ka L () T -40db/dec 1 T
0时有低频渐近线方程
20lgKp
L ( ) 20 lg K 20 lg K p
斜率=0, 与实轴无交点。
1 T
(2) N=1 (1型系统) G ( j ) H ( j )
K j (Tj 1)
2 2
L ( ) 20 lg K 20 lg 20 lg T 1 0时有低频渐近线方程
1 Kg
-180 不稳定闭环系统的GM和PM
自动控制理频域伯德图

Lω 20lg1 =0 dB
——低频渐近线为一条0dB的水平直线。
Lω 20lg 1 Tn ω
2
2 2
2ζ T ω
n
2
高频段,即ωTn>>1时
L() 20lg( Tn ) 40lg(Tn )
2 2
当ω增加10倍
ωTn 40 40lgωTn L() 40lg10
相频与ω无关,值为-90°且平行于横轴的直线。
L ( )
20 0
20 0.1 10
1
( )
0 90
0.1
1
10
3 微分因子
G jω jω
微分环节是积分环节的倒数,它们的 曲线斜率和相位移也正好相差一个负号。
L ( )
20
0
20
0.1 20
1
10
( )
90
L() 40lg Tn 40lg1 0(dB)
即高频渐近线是一条斜率为-40dB/dec的直线。 当 ωω 1 时
n
Tn
说明
ω ωn
1 Tn
为二阶系统(振荡环节)的转折频率。
。10
0
0.1
0.2 0. 3
L ( )
dB
-40dB/dec
0 .7 1
10
系统 的相频特性为 90 arctan arctan 2 10
0
W=0
90
0
W=1
W=10 W=无穷大
110.860
123.70
0 90
伯徳图的画法和在判稳中的应用
例:开环特征方程有两个右根,P=2,试判定闭环系统的稳定性。 解:
P=2
正负穿越数之差(N+-N-)为1
Z=P-2N=2-2=0 系统闭环稳定
例:开环特征方程无右根,P=0,试判定闭环系统的稳定性。 解:
P=0
正负穿越数之差为0
系统闭环稳定
§ 5.4 稳定裕度
♣ ♣ ♣
K值较小时,系统稳定; K值较大时,系统不稳定的; K取某个值时,Nyquist曲线通过 (-1,j0)点,系统处于临界稳定状态。
c ——Nyquist曲线与单位圆交点处(此处幅值为1)的 称为 截止频率(又称剪切频率),记为 c 。
G( jωc ) H ( jωc ) 1
相角裕度 180 G( jc ) H ( jc ) 含义:如果系统对频率为截止频率的信 号的相角滞后再增大 度,则系统处于临界 稳定状态。稳定系统的 > 0 , 越大,系统相 对稳定性越高。
(5) 系统开环对数相频特性表达式为
( ) arctan0.5 900 arctan arctan0.05
逐点计算结果
系统开环相频特性数据
-20dB/dec
20
-20dB/dec -40dB/dec -40dB/dec
例:
L(1) 20lg 7.5 17.5
2. Bode图上的稳定判据
闭环系统稳定的充要条件是:当ω 由0变到 +∞ 时,在开环 对数幅频特性 L(ω)≥0 的频段内,相频特性φ(ω) 穿越-π线的次 数(正穿越与负穿越次数之差)为p/2,p为s平面右半部的开 环极点数。 若开环传递函数无极点分布在S右半平面,即 P 0 , 则闭环系统稳定的充要条件是:在L(ω)≥0 的频段内,相频 特性φ(ω) 在-π线上正负穿越次数代数和为零,或者不穿越 -π线 。 Nyquist图 Bode图
16第十六讲伯德图分析-稳定性-及幅值和相角裕度

转折频率: ω =1( 两次), ω =5 (零), ωn=2 (二 阶系统的转折频率).
1 n 4 2
0.25
将在以下频率范围内画出伯德图:
0.1 100
1.25K 0 dB
画出每一个环节的增益和相位曲线
0.01 40
0.1
1.0
10
M db
20
0
-20
伯德图中的增益裕度和相角裕度伯德图中的增益裕度和相角裕度dblg20lg20相位裕度是使相角曲线向下移动直到增益和相角穿越点发生在同一频率时的纯相角滞后量
线性控制系统工程
第16章 伯德图分析,稳定性, 及幅值和相角裕度
第16章 伯德图分析,稳定性 及幅值和相角裕度
伯德图中的增益裕度和相角裕度
M ( pc)
6 20 lg 2 K 20 lg 2 20 lg K K dB 6 20 lg 0.5K 20 lg 0.5 20 lg K K dB
• 考虑下面的例子: K GH s s1 2s 1 3s K=0.1
转折频率为 1, 0.5, 0.34
g c
(g c)
(g c)
GM
PM 180 gc GM db 20 lg 1
Kc 1 K M pc 20 lg M pc
M pc
条件稳定
• 改变增益的作用是使幅值曲线上下平 移,而相角曲线不变。 如果 20 lg K K dB 那么
画出当 K=0.8时系统的伯德图, 并确定 增益裕度和相位裕度。 使系统的相位裕 度约为 60º 的K为何值? 解:
5K 1 s / 5 1.25K 1 s / 5 GH s 2 4s1 s 1 s / 4 s / 4 s1 s 1 s / 4 s 2 / 4 2
03频率特性法——奈氏图和伯德图画法
1)
30
20db
[-20]
[-40]
0db
0.1
0.5 1
2
[-20]
10
30
100
ω
-20db --40db
[-40]
转折频率:0.5 2 30
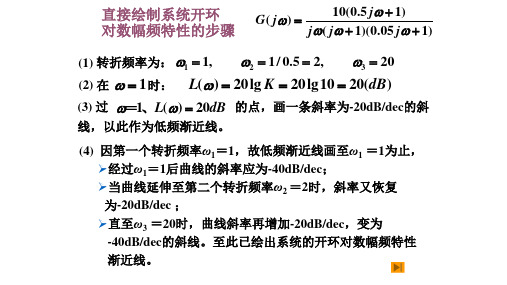
例:已知单位反馈系统的开环传递函数 G(s) 100(s 2) s(s 1)(s 20)
试绘制开环对数频率特性曲线。 解:典型环节传递函数表示的标准形式
G(s) 10(0.5s 1) s(s 1)(0.05s 1)
其对应的频率特性表达式为
G( j )
10(0.5 j 1)
j( j 1)(0.05 j 1)
k 10, v 1
直接绘制系统开环
G( j )
10(0.5 j 1)
对数幅频特性的步骤
j( j 1)(0.05 j 1)
(1) 转折频率为: 1 1, 2 1 / 0.5 2, 3 20
(2) 在 1时: L() 20lg K 20lg10 20(dB)
(3) 过 =1、L() 20dB 的点,画一条斜率为-20dB/dec的斜
线,以此作为低频渐近线。
(4) 因第一个转折频率ω1=1,故低频渐近线画至ω1 =1为止, ➢经过ω1=1后曲线的斜率应为-40dB/dec; ➢当曲线延伸至第二个转折频率ω2 =2时,斜率又恢复 为-20dB/dec ; ➢直至ω3 =20时,曲线斜率再增加-20dB/dec,变为 -40dB/dec的斜线。至此已绘出系统的开环对数幅频特性 渐近线。
(3) 过ω=1 rad/s,20lgK这个点,作斜率等于 -20v dB/dec 的低频段的渐近线。
(4) 向右延长最低频段渐近线,每遇到一个转折频率改变一 次渐近线斜率:
控制系统的伯德图分析——自动控制原理
伯德图
c
GMb>0
g
PM>0 Kg>1
PM -180
稳定闭环系统的GM和PM
奈氏图 jIm
L()
伯德图
c 1
0 GMb<0
c
ReΒιβλιοθήκη PM()0g
1
PM<0 Kg
-180
PM
Kg<1
不稳定闭环系统的GM和PM
GM,PM常作为控制系统的频域设计指标。
GM,PM大表明相对稳定性好,但响应速度低。 GM,PM小表明相对稳定性差,但响应速度高。 过大或过小都不好,较好的经验值为:
0时有低频渐近线方程
L( ) 20 lg K 20 lg K p
1
斜率=0, 与实轴无交点。
T
(2) N=1 (1型系统)
G( j)H ( j) K j (Tj 1)
L( ) 20 lg K 20 lg 20 lg T 2 2 1
0时有低频渐近线方程
L( ) 20 lg K 20 lg 20 lg K v 20 lg
斜率=-40 db/dec,交点: K a
L ()
1 T
Ka
-40db/dec
1
T Ka
L ()
1 T
Ka
-40db/dec
1
Ka
T
三、 伯德图与稳态误差的关系
表5-2 系统类型和低频渐近线特征
系统类型 斜率
0
0
1 -20
2 -40
L(=1) 与L=0的交点
20 lg K无p 交点
20 lg Kv
Kv
20 lg K a
Ka
斜率=-20 db/dec,交点: =Kv
系统的开频率特性(BODE图)

3 = 20rad/s
当 1 2 时:
G1(s) = 10
G2
(s)
=
1 s
1 G3(s) = s+1
L / dB
- -20dB/dec 20dB/dec
-40dB/dec
−7.96dB
| G(j5) | 10 = 0.4 55
/ (rad/ s)
例5-6 绘制开环传递函数 G(s) 的对数幅频渐近特性曲线
典型环节
G1(s) = 10,
G2
(s)
=
1 s
,
G3(s) =
1, s +1
G4 (s) = 0.2s +1,
G5 (s) =
(s / 20)2
1 + (s / 20) +1
转折频率 1 = 1rad/s, 2 =5rad/s, 3 = 20rad/s
典型环节
G1(s) = 10,
1 G2 (s) = s ,
第五章 频率域方法
系统的开环频率特性(Bode图)
系统的开环对数频率特性
设系统的开环传递函数是n个典型环节的传递函数的乘积,即
则开环频率特性为
G(s) = G1(s)G2 (s) Gn (s)
G(j) = G1(j)G2 (j) Gn (j)
设第i个典型环节的幅频特性和相频特性为
Ai () = Gi (j)
比例环节 G1(s) = 10
积分环节
G2
(s)
=
1 s
惯性环节
G3 (s) =
1 0.5s+1
转折频率: 2rad/s
L / dB /( )
-20dB/dec
自动控制原理之伯德图
5.4 系统开频率特性的绘制
⑤ 绘出用渐近线表示的对数幅频特性以后,如果需要,可以进
行修正。通常只需修正交接频率处以及交接频率的二倍频和 1/2倍频处的幅值就可以了。
对于一阶项,在交接频率处的修正值为±3dB;
在交接频率的二倍频和1/2倍频处的修正值为±1dB。
对于二阶项,在交接频率处的修正值可由公式 20lg 1
例5-12 已知系统的开环传递函数为
G(s)H (s)
K (1 s) 1 1
LL( )
s T1s 1 T2 s 2
1
2T2 s 1 (T1
T2 )
dB ( ) AB
20dB/ dec
20log K
渐近特性
20dB/ dec
0
11
20dBT/1dec
40dB/ dec
1
T2
C
40dB/ dec
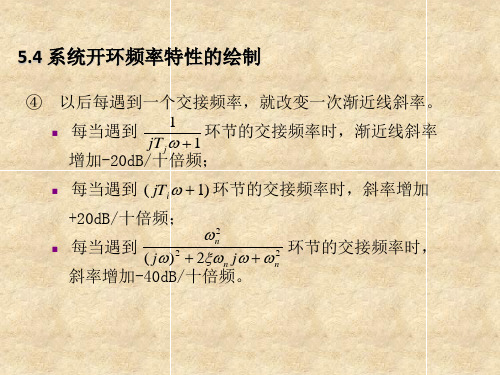
5.4 系统开环频率特性的绘制
④ 以后每遇到一个交接频率,就改变一次渐近线斜率。 每当遇到 1 环节的交接频率时,渐近线斜率 jTj 1 增加-20dB/十倍频;
每当遇到 ( jTi 1) 环节的交接频率时,斜率增加
+20dB/十倍频;
每当遇到
( j)2
2 n
2n
j
2 n
环节的交接频率时,
斜率增加-40dB/十倍频。
求出。
2
系统开环对数幅频特性L(ω)通过0分贝线,即 L(c ) 0 或 A(c ) 1
时的频率c 称为穿越频率。穿越频率c 是开环对数相频
特性的一个很重要的参量。
5.4 系统开环频率特性的绘制
⑥ 画出各串联典型环节相频特性,将它们相加后得到 系统开环相频特性。
一个系统动静态性能的好坏可以从波特图中直观的体现出来

一个系统动静态性能的好坏可以从波特图中直观的体现出来今天来学习波特图,对于很多闭环系统,我们需要画出其波特图去分析其稳定性,而且一个系统动静态性能的好坏可以从波特图中直观的体现出来。
在讲解波特图之前,我们先来回顾一下复数知识,下图为复平面,即以实部为x轴和虚部为y轴的坐标系。
给定一个复数,我们可以通过以下两个公式求出其模和幅角,而且分贝概念的定义就是20倍的增益的模取以10为底的对数。
这里选择对数的原因为可以在有限的坐标下包含更大的频率范围。
接下来,再来看一下一阶系统的波特图,首先给出一阶系统的传递函数,并且取其模,这里对分数取模等于对分子分母分别取模再相除,再取对数得到增益的分贝形式,这里直流增益为0dB,还可以得到其角度,右下图为二阶系统的波特图,但是我们可以只看其低频部分(接下来,再来讲解二阶系统的波特图,同样的,我们先来回顾一下数学知识,利用欧拉公式能够简化复数的乘法和除法运算,通过下式观察可知,复数相乘,结果的模为两个乘数的模的乘积,结果的幅角为两个乘数幅角的和。
同理,复数相除,其模相除,其幅角相减。
这样我们在计算二阶系统的模和幅角就会方便的多,首先将传递函数分子分母因式分解得到下式,再对其取模,这里可以先用除法关系,这样模为分子分母模的商,再利用乘法关系,这样模为各个因式的模,幅角同理,为分子各因式幅角的和再减去分母各因式的幅角。
这样就可以画出其波特图,再来看右边的波特图,在第一个极点之后,增益以-20dB每十倍频下降(图中为-6dB每倍频下降,但下降速率是相同的),相角下降到-45度,之后在无穷远处下降到-90度,在第二个极点之后,增益以-40dB每十倍频下降,相角下降到-135度,之后在无穷远处下降到-180度。
总结一下,极点的作用就是,在增益上面,改变极点频率之后的斜率,每经过一个极点之后增益下降速率增加-20dB每十倍频程,而在相角方面,对相角的改变是逐渐产生的,具体体现在每经过一个极点之后角度由前一个角度逐渐。
伯德图在随动系统的动态性能分析中的应用
邢台学院物理系《自动控制理论》课程设计报告书设计题目:伯德图在随动系统的动态性能分析中的应用专业:自动化班级:学生姓名:学号:指导教师:2013年04月07 日邢台学院物理系课程设计任务书专业:自动化班级:2013 年 04 月 07 日摘要随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的,主要解决有一定精度的位置跟随问题,如数控机床的刀具给进和工作台的定位控制,工业机器人的工作动作,导弹制导、火炮瞄准等。
在现代计算机集成制造系统(CIMC)、柔性制造系统(FMS)等领域,位置随动系统得到越来越广泛的应用。
一般来说,随动控制系统要求有好的跟随性能。
位置随动系统是非常典型的随动系统,是个位置闭环反馈系统,系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器,自整角机,旋转变压器,感应同步器等。
位置随动系统中的给只给定量是经常变动的,是一个随即量,并要求输出量准确跟随给定量的变化,输出响应具有快速性,灵活性和准确性。
本次课程设计以位置随动系统为例,伯德图在随动系统的动态性能分析中的应用关键词:随动系统相角裕度幅值裕度超调量调节时间目录1 位置随动系统结构和工作原理................................1.1 位置随动系统结构组成......................................1.2 位置随动系统工作原理......................................2 系统的分析与设计..........................................2.1 位置随动系统方块图........................................2.2 系统数学模型的建立........................................2.3 系统参数选择..............................................3 用伯德图分析系统性能......................................4 总结体会.................................................. 参考文献.....................................................1位置随动系统的结构与工作原理1.1 位置随动系统的结构组成位置随动系统的原理图如图1-1。
4 系统的频率特性响应-3(bode图)

G j j 1
5.二阶振荡环节
1 G j 2 2 T j 2T j 1
1 2 2 2 2 L( ) 20 lg 2 20 lg 1 T 2T 2 T j 2T j 1 2T arctan 2 2 1 T arctan 2T 2 2 1 T 1 T 1 T
1 1 10 T 1 T 10 1 T
40dB / dec
典型环节的对数幅频特性图
一阶微分环节
L( ) dB
20
20dB/dec
0.1 T
1 T
-20
10 T
rad / s
二阶微分环节
L( ) dB
40
40dB/dec
0.1 T
1 T
-40
10 T
rad / s
延时环节
L( ) dB
斜率由积分环节决定
v= 0 v = 1 v = 2
0 dB/dec -20 dB/dec -40 dB/dec
第三步: 依次画转折频率以后部分,增减斜率。
在交接频率处,曲线斜率发生改变,改变多少取决于典型环节种类.在惯性环
节后,斜率减少20dB/dec;而在振荡环节后,斜率减少40dB/dec
第四步: 在转折频率附近进行修正,得到较为精确的曲线。
例: 例
1 2
j 1]
该系统可认为由下列五个典型环节组成: 1 G1 j 7.5 G4 j 1 2 j 1 1 G2 j 1 G j j 1 5 3 j 1 G3 j 1 2 [( 2 ) ( j ) 2 2 2 1 2 12 j 1]
2010版Bode图专讲

对数频率特性曲线(即Bode图):
L (ω ) = 20 lg G ( jω ) = −20 lg (1 − T 2ω 2 ) 2 + ( 2ζ T ω ) 2 2ζ T ω 1 − arctan , ω≤ 1 − T 2ω 2 T ∠ G ( jω ) = − π − arctan 2ζ T ω , ω > 1 1 − T 2ω 2 T
L (ω) (dB)
20 90° 0.1 0 -20 -90° 1 10
ω (rad/s)
φ(ω)
[-20]
§4-2 典型环节的频率特性
三、惯性环节的频率特性
1 1 G ( jω ) = = = Ts + 1 s = jω T jω + 1
L (ω) (dB)
1 T ω +1
2 2
∠ ( − arctan T ω )
开环对数幅频特性: q L(ω ) = 20 lg G( jω ) = ∑[20 lg Gi ( jω ) ] i =1 开环对数相频特性: q ∠G ( jω ) = ∑ [∠Gi ( jω )]
i =1
叠 加
§4-3 控制系统的开环频率特性
对数频率特性曲线(即Bode图)
在工程实际中,常将频率特性画成半对数坐标的形式, 在工程实际中,常将频率特性画成半对数坐标的形式, 这种半对数坐标图又称为Bode Bode图 这种半对数坐标图又称为Bode图。
举例:试绘制该系统的 曲线。 举例:试绘制该系统的Bode曲线。 曲线
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
邢台学院物理系《自动控制理论》课程设计报告书设计题目:伯德图在随动系统的动态性能分析中的应用专业:自动化班级:学生姓名:学号:指导教师:2013年04月07 日邢台学院物理系课程设计任务书专业:自动化班级:2013 年 04 月 07 日摘要随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的,主要解决有一定精度的位置跟随问题,如数控机床的刀具给进和工作台的定位控制,工业机器人的工作动作,导弹制导、火炮瞄准等。
在现代计算机集成制造系统(CIMC)、柔性制造系统(FMS)等领域,位置随动系统得到越来越广泛的应用。
一般来说,随动控制系统要求有好的跟随性能。
位置随动系统是非常典型的随动系统,是个位置闭环反馈系统,系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器,自整角机,旋转变压器,感应同步器等。
位置随动系统中的给只给定量是经常变动的,是一个随即量,并要求输出量准确跟随给定量的变化,输出响应具有快速性,灵活性和准确性。
本次课程设计以位置随动系统为例,伯德图在随动系统的动态性能分析中的应用关键词:随动系统相角裕度幅值裕度超调量调节时间目录1 位置随动系统结构和工作原理................................1.1 位置随动系统结构组成......................................1.2 位置随动系统工作原理......................................2 系统的分析与设计..........................................2.1 位置随动系统方块图........................................2.2 系统数学模型的建立........................................2.3 系统参数选择..............................................3 用伯德图分析系统性能......................................4 总结体会.................................................. 参考文献.....................................................1位置随动系统的结构与工作原理1.1 位置随动系统的结构组成位置随动系统的原理图如图1-1。
该系统的作用是使负载J(工作机械)的角位移随给定角度的变化而变化,即要求被控量复现控制量。
系统的控制任务是使工作机械随指令机构同步转动即实现:Q(c)=Q(r)图1-1 位置随动系统原理图Z1—电动机,Z2—减速器,J—工作机械系统系统主要由以下部件组成:系统中手柄是给定元件,手柄角位移Qr是给定值(参考输入量),工作机械是被控对象,工作机械的角位移Qc是被控量(系统输出量),电桥电路是测量和比较元件,它测量出系统输入量和系统输出量的跟踪偏差(Qr –Qc)并转换为电压信号Us,该信号经可控硅装置放大后驱动电动机,而电动机和减速器组成执行机构。
1.2 系统的工作原理控制系统的任务是控制工作机械的角位移Qc跟踪输入手柄的角位移Qr。
如图1-1,当工作机械的转角Qc与手柄的转角Qr一致时,两个环形电位器组成的桥式电路处于平衡状态。
其输出电压Us=0,电动机不动,系统处于平衡状态。
当手柄转角Qr发生变化时,若工作机械仍处于原来的位置不变,则电桥输出电压Us不等于0,此电压信号经放大后驱动电动机转动,并经减速器带动工作机械使角位移Qc向Qr变化的方向转动,并逐渐使Qr和Qc的偏差减小。
当Qc=Qr 时,电桥的输出电压为0,电机停转,系统达到新的平衡状态。
当Qr任意变化时,控制系统均能保证Qc跟随Qr任意变化,从而实现角位移的跟踪目的。
该系统的特点:1、无论是由干扰造成的,还是由结构参数的变化引起的,只要被控量出现偏差,系统则自动纠偏。
精度高。
2 、结构简单,稳定性较高,实现较容易。
2系统的分析与设计2.1 位置随动系统方块图根据系统的结构组成和工作原理可以画出系统的原理方块图,如图2-1。
可以看出,系统是一个具有负反馈的闭环控制系统。
图2-1位置随动控制系统方块图2.2 系统数学模型的建立该系统各部分微分方程经拉氏变换后的关系式如(2-1):(2-1)(a)(2-1)(b)(2-1)(c)(2-1)(d)(2-1)(e)(2-1)(f)(2-1)(g)根据各个环节结构图及其传函写出整个系统的结构图,如图2-2所示。
图2-2 位置随动系统的方框图由方框图写出系统的开环传递函数为: ()()2()s a ma a m K K K G s i L S R JS BS K =⎡⎤+++⎣⎦(2—2)式中:La —电动机电枢绕组的电感Ra —电动机电枢绕组的电阻 Km —电动机的转矩系数Ke —与电动机反电势有关的比例系数 Ks —桥式电位器的传递系数 Ka —放大器增益 i —减速器速比J —折算到电动机轴上的总转动惯量 B —折算到电动机轴上的总粘性摩擦系数 如果略去电动机的电枢电感La ,并令1s a m a K K K K iR =, m e aK KF B R =+ .其中,K1称为增益,F 称为阻尼系数。
那么在不考虑负载力矩的情况下,位置控制系统的开环传递函数可简化为:)1()(+=Ts s Ks G 其中,K=K 1/F ,称为开环增益,为需要选定的参数;T=J/F ,称为机电时间常数,一般为系统保留下来的固有参数。
则可得相应的闭环传递函数为:2()()1()G s Ks G s TS S KΦ==+++ (2-3)由此该位置控制系统可简化为一个二阶系统,其原理图如图2-3所示:图 2-3 近似后系统的方框图将式(2-3)与二阶系统的闭环传递函数的标准形式比对:222()()1()()2G s s G s H s S S ωζωωΦ==+++ (2-4) 可得:自然频率n ω=(2-5)(a ) 阻尼比 ζ= ζ=(2-5)(b ) 根据时域分析中讲过的公式,可以算出不同K 值下系统的性能指标如表2-1。
表2—1 时域指标的计算值由上表可见,当开环放大倍数K 越大,对应的阻尼比ξ越小,则相位裕量愈大,最大超调量愈小,但同时快速性将变差。
令式(2-4)的分母多项式为零,得二阶系统的特征方程:222n n S S ωζω++=0 (2-6)其两个根(闭环极点)为: 1,2n S ζωω=-± (2-7)显然,二阶系统的时间响应取决于ζ和Wn 这两个参数。
根据式(2-5)中ζ,n ω与K ,T 之间的关系,可求出K 和T 与动态性能指标之间的关系,从而间接的得到了Ks ,K A ,J ,B 及i,Ke 等系统参数与动态性能指标之间的关系。
2.3 系统的参数选择根据对系统设计的要求,取可控硅装置的放大倍数:K a =40 取电动机的额定功率P N =27KW ,则可得:360602710176.6922 3.141460N N N P T N M N M n π⨯=∙=∙∙=∙⨯176.691.3136N m T aN T K C I =Φ=== 20.1460E T C C πΦ=∙Φ= 02201571.430.14aN E U n C ===Φ 则可得起动到额定转速时的转速超调量为:01571.431460%100%100%8%10%1460aN n aN n n n δ--=⨯=⨯=<,满足设计要求 取. 0.115a R =Ω,由0a aa aU E I R -=得,0161390.115a I A == 则电流超调量为:0139136%100%100%2%5%136a a i a I I I δ--=⨯=⨯=<,满足设计要求。
1.3136176.8T a T C I =Φ=⨯= 由式2n T Jπ=得,22 3.14176.80.761460T J n π⨯⨯=== 为了方便计算,取B=0.76,则0.707n Tω== 又因为 0.760.320.14 1.30.760.115m e aJ J T K K F B R ====⨯++ ,所以可得0.7072.210.32n ω== 由以上的分析及参数的选择,可得所设计的位置系统的开环传递函数为:4.88195.20()( 3.12)( 3.12)a K G S S S S S ==++ 3 用伯德图分析系统性能系统的开环传递函数为: 4.88195.20()( 3.12)( 3.12)a K G S S S S S ==++ 伯德图由MATLAB 软件绘制 程序: num=[195.20]; den=[1 3.12 0]; bode =(num,den)相对裕量 幅值裕量 >> num=[195.20]; den=[1 3.12 0];[mag,phase,w]=bode(num,den); >> semilogx(w,20*log10(mag));grid; >> [gm,pm,wcg,wcp]=margin(mag,phase,w) gm = 329.8047 pm = 12.7955wcg = 253.7991 wcp = 13.7952该系统的设计中取ζ=0.707,即取K=1/2T 。
延迟时间t d t d = (1+0.7ζ)/n ω =2.69(s ) 调节时间t s 3.53.5(5%)2.24()0.707 2.21s nt s δζω====⨯ 4.54.5(2%) 2.88()0.707 2.21s nt s δζω====⨯上升时间t r3.140.751.51()2.210.707r d t s πβω--====⨯ 峰值时间t p2.01()p d t s πω==== 超调量σ℅ %3%21/==--ζζπσe4 总结与体会根据被控对象及给定的技术指标要求设计自动控制系统,需要进行大量的分析计算。
设计中需要考虑的问题是多方面的,既要保证所设计的系统有良好的性能满足给定技术指标的要求;又要照顾到便于加工,经济性好,可靠性高。
在设计过程中,既要有理论指导,也要重视实践经验,往往还要配合许多局部和整体的实验。
当被控对象给定后,按照被控对象的工作条件,被控信号具有的最大速度和加速度要求,可以初步选定执行元件的型式、特性和参数。
然后,根据测量精度、抗扰能力、被测信号的物理性质、测量过程中的惯性及线性度等因素,选择合适的测量变送元件。