第五章 轮系习题
轮系习题

轮系习题一、填空1.所谓定轴轮系是指 ,而周转轮系是指 。
2.在周转轮系中,轴线固定的齿轮为 ;兼有自转和公转的齿轮称为 ; 而这种齿轮的动轴线所在的构件称为 。
3.组成周转轮系的基本构件有: , , ;i k 1与i kH1有区别,i k 1是 ;i kH1是 。
4.在轮系的传动中,有一种不影响传动比大小,只起改变转向作用的齿轮,我们把它称为____________________。
5.差动轮系的自由度是__________,行星轮系的自由度是_____________。
6.在周转轮系传动比计算中,运用相对运动的原理,将周转轮系转化成假想的定轴轮系方法称为__________________。
二、判断题1.定轴轮系的传动比等于各对齿轮传动比的连乘积。
( )2.周转轮系的传动比等于各对齿轮传动比的连乘积。
( )3.轮系可以分为定轴轮系和周转轮系,其中,差动轮系属于定轴轮系。
( )4.在轮系中,惰轮既能改变传动比大小,也能改变转动方向。
( )三、计算题1.图示轮系中,z z 1325==,z 5100=,z z z 24620===,试区分哪些构件组成定轴轮系?哪些构件组成周转轮系?哪个构件是系杆H ?传动比i 16=?第1题图 第2题图2.在图示轮系中,已知各轮齿数为z 120=,z 240=,z 250'=,z 330=,z 320'=,z 430=,n 11000= r/min 。
试求:轴B 的转速n B 的大小,并指出其转向与n 1的转向是否相同。
3.图示轮系中,已知z z z z 134420====',z 280=,z 560=。
若n A =1000 r/min,求n B 的大小及方向。
第3题图 第4题图4.在图示轮系中,已知各轮的齿数z 117=,z 223=,z 220'=,z 360=,z 320'=,z 440=, 构件B 的转速n B =200 r/min,转向如图示。
机械原理-轮系集合例题

第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
轮系习题

(3) 混 合 轮 系 i1B=i12·i2’B=40×20=800
n B= n H , 方 向 向 下
机械原理习题课
例3 图示轮系中,Z1 = Z3=25,Z5 = 100,Z2 = Z4 = Z6 = 20,试区分哪些构件组成定轴轮系?哪些构件组成周转轮系? 哪个构件是转臂H?传动比i16 =?
i1H n1 1980000 nH
t i1H / n1 1440min 24h
机械原理习题课
基本概念题
机械原理习题课
1.选择题:
1)图示轮系属于 B A. 定轴; C. 行星;
轮系。
B. 差动; D. 混合
2)图示轮系,给定齿轮1的转动方向如图所 示,则齿轮3的转动方向 C A. 与ω1相同; 。 B. 与ω1相反;
机械原理习题课
轮系典型例题
机械原理习题课
例1. 在图示轮系中,已知:蜗杆为单头且右旋,转速 n1=1 = 40,Z2‘ = 20,Z3 = 30,Z3’ = 18,Z4 = 54, 试: (1) 说明轮系属于何种类型; (2) 计算齿轮4的转速n4;(3) 在图中标出齿轮4的转动方向。
1’ 1
n1
定轴: n2和n4’转向相反,n2’和n4转向相反
5’ 5
n Z i12 1 2 n2 Z1 n1Z1 n2 Z2
i1'4'
n1' Z5' Z4' = n4' Z1' Z5
H 2' 3 2 4' 4
n1' Z1' Z5 n4' Z5' Z 4'
差动:
i
H 2'4
机械设计基础 第5章习题
5-5
5-5
i1H3
n1H n3H
n1 nH n3 nH
z2z3 z1z2
28 54 9 12 14
n3 =0 n1=ns
ns -nH =-9 0-nH
iSH
=
nS nH=1+9=0传动比 iSH 为10,S的方向和H的方向相同。
5-9
其中齿轮 1、3为中心轮,齿轮2、2′为行星轮,H 为行星架
在周转轮系中
i4H7 =
n4H n7H
= n4 -nH n7 -nH
=- z5z7 z4 z6
=- 24 63 =-4 18 21
在定轴轮系中
i13 =
n1 n3
=
z3 z1
=
85 17
=5
n3 nH
n1 5 nH
n4 -nH n7 -nH
n4
1 5
n1
n7
1 5
n1
4
n7 =np
联立上式解得 np =(n1-n4 )/4
第5章课后习题
2014-04
5-4
从图上分析这是一个周转轮系,其中齿轮 1、3为中 心轮,齿轮2为行星轮,构件H为行星架
5-4
i1H3
n1H n3H
n1 nH n3 nH
z3 z1
51 3 17
n3 =0 n1=4nH
所以当手柄转过90度时,转盘H转过的角度为90/4=22.5度
P的转向与齿轮1和4的转向相反。
THE END
(1)当 n1=10001r / min n4 =10000r / min np =(n1-n4 )/4=0.25r / min
P的转向与齿轮1和4的转向相同。
机械设计基础_孙立鹏_习题第五章轮系
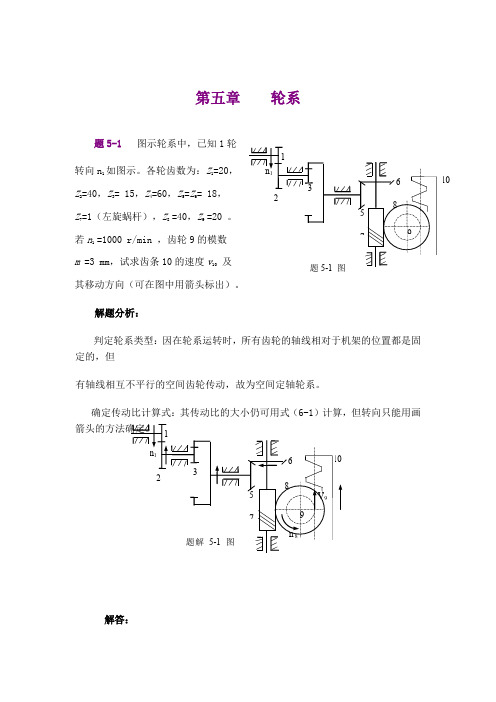
第五章轮系题5-1图示轮系中,已知1轮Array如图示。
各轮齿数为:Z1=20,转向n1Z=40,Z3= 15,Z4=60,Z5=Z6= 18,2Z=1(左旋蜗杆),Z8=40,Z9 =20 。
7若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v及10其移动方向(可在图中用箭头标出)。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画解答:1.确定齿条10的速度v 10 大小∵ 320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1的齿数为Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ;(2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
(完整版)轮系试题

轮系一、判断题(正确T,错误F)1.定轴轮系是指各个齿轮的轴是固定不动的。
()2.单一周转轮系具有一个转臂。
()3.单一周转轮系中心轮和转臂的轴线必须重合。
()4.周转轮系中的两个中心轮都是运动的。
()5.转化轮系的传动比可用定轴轮系求解,因此转化轮系中igj=ngnj的数值为有齿轮g到j间所有从动轮齿数相乘积与所有主动轮齿数相乘积的比值。
()6.行星轮系和差动轮系的自由度分别为1和2,所以只有差动轮系才能实现运动的合成或分解。
()二、单项选择题1.行星轮系的自由度为()。
A 1B 2C 3D 1或22.()轮系中必须有一个中心轮是固定不动的。
A定轴B周转C行星D差动3.()轮系中两个中心轮都是运动的。
A定轴B周转C行星D差动4.()轮系不能用转化轮系传动比公式求解。
A定轴B混合C行星D差动5.每个单一周转轮系具有()个转臂。
A 0B 1C 2D 36.每个单一周转轮系中心轮的数目应为()。
A 3B 2C 1D 1或27.每个单一周转轮系中,转臂与中心轮的几何轴线必须()。
A交错B相交C重合D平行8.两轴之间要求多级变速传动,选用()轮系合适。
A定轴B行星C差动 D B和C9.三轴之间要求实现运动的合成或分解,应选用()。
A定轴轮系B行星轮系C差动轮系 D A和B三、填空题1.轮系的主要功用是、、、。
2.定轴轮系是指。
3.周转轮系是指。
4.求解混合轮系的传动比,首先必须正确地把混合轮系划分为和各个,并分别列出它们的计算公式,找出其相互联系,然后。
四、计算题=900r/m in,z2=60,z2'=25,z3=20,z 3'=25,z4=20,z4'=30,z5=35,z5'=28,z6=135,求n6的大小和方向。
2.图示轮系中,已知z1=60,z2=48,z2'=80,z3=120,z3'=60,z4=40,蜗杆z4'=2,1.在图示轮系中,设已知双头右旋蜗杆的转速n 1(右旋),蜗轮z5=80,齿轮z5'=65,模数m=5mm。
机械设计课后习题--轮系
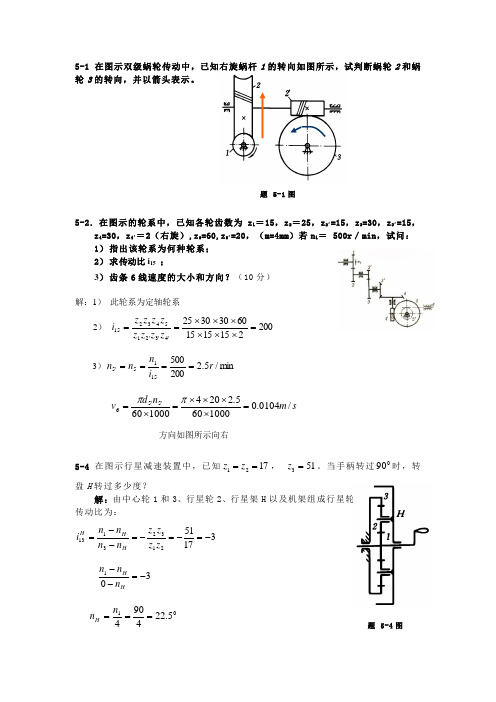
5-1 在图示双级蜗轮传动中,已知右旋蜗杆1的转向如图所示,试判断蜗轮2和蜗轮3的转向,并以箭头表示。
5-2.在图示的轮系中,已知各轮齿数为z l =15,z 2=25,z 2´=15,z 3=30,z 3´=15,z 4=30,z 4´=2(右旋),z 5=60,z 5´=20,(m=4mm )若n l = 500r /min ,试问:1) 指出该轮系为何种轮系;2) 求传动比i 15 ; 3) 齿条6线速度的大小和方向?(10分)解:1) 此轮系为定轴轮系2) 200215151560303025'4'3'21543215=⨯⨯⨯⨯⨯⨯==z z z z z z z z i 3)min /5.22005001515'5r i n n n ==== s m n d v /0104.01000605.2204100060'5'56=⨯⨯⨯⨯=⨯=ππ方向如图所示向右5-4 在图示行星减速装置中,已知1721==z z , 513=z 。
当手柄转过090时,转盘H 转过多少度?解:由中心轮1和3、行星轮2、行星架H 以及机架组成行星轮系,转化轮系的传动比为:3175121323113-=-=-=--=z z z z n n n n i H H H 301-=--HH n n n 015.224904===n n H 题 5-4图题 5-1图方向相同5-5 在图示的手动葫芦中,S 为手动链轮,H 为起重链轮。
已知121=z ,282=z ,142='z ,543=z ,求传动比SH i 。
解:由中心轮1和3、行星轮2-2’、行星架H 行星轮系,故()914125428''1213221321313113-=⨯⨯-=-=-=--==z z z z z z z z n n n n n n i H H H H H 03=n ,1n n s =101===∴HH s sH n n n n i 5-8 在图示圆锥齿轮组成的行星轮系中,已知各轮的齿数为201=z ,302=z ,502='z ,803=z ,m in /501r n =,求H n 的大小和方向。
第5章轮系习题

轮系中,已知:z1=22,z2=33,z3’=z5.
1)若1,2,3均为正确安装的标准齿轮 传动,求z3的齿数为多少?
2)求传动比i15?
1)z3=2z2+z1=88 (由同心条件). 2)1,2,3,H构成差动轮系,有i13H= (n1-nH)/(n3-nH)=-z3/z1……① 3’,4,5构成定轴轮系。有i3’5=n3’/n5 =-z5/z3’ ……② 在①、②式中,n5=nH,n3=n3’。 即有 (n1-n5)/(n3-n5)=-88/22 n3/n5=-1 i15=n1/n5=9
i1H4
n1 nH n4 nH
z2z4 z1 z3
40 90 6 30 20
将n4=0代入上式得
n1 1 6 nH
则,nH=n1/7=350/7 (r/min) =50 r/min,与n1转向相同。
例2 在图所示的轮系中,已知 z1=z3=50,z2=z2’=30 , nH=60r/min (方向从左轴端观察为顺时针)。求
已知z 1
30,z 3
90,求i1H。
2
nH 2
解: 行星轮系
nH 3
H
1
nH 1
3
iH
H 1
nH 1
n n
1
H
13 H nH n n
3
3
3
H
1 n1 nH
— z2z3 z1z2
—
zz 23
zz 12
i 1H
1
z 3
z 1
1
90 30
4
1、H转向相同
z 1
100,z 2
101,z 2
100,z 3
H
与n3转向相同
2
轮系练习题

第5单元轮系一、单项选择题。
(本大题共20小题,每题2分,共40分)1.由一系列相互啮合的齿轮组成的传动系统称()。
A.轮系B.轮群C.轮合D.轮组2.下列关于轮系说法正确的是()。
A.可以实现运动的合成但不能分解运动B.不适宜作较远距离的传动C.不能获得较大的传动比D.可以实现变向和变速要求。
3.定轴轮系的传动比大小与惰轮的齿数()。
A.有关B.无关C.成正比D.成反比4.定轴轮系中适用(—1)m(m为外啮合次数)决定传动比的正负号的情况是( )。
A.所有齿轮轴线都不平行B.所有齿轮轴线都平行C.首末两轮轴线平行D.所有齿轮都是圆柱齿轮5.定轴轮系中各齿轮的几何轴线位置都是()。
A.固定的B.活动的C.相交的D.交错的6.在由一对外啮合直齿圆柱齿轮组成的传动中,若增加()个惰轮,则使其主、从动轮的转向相反。
A.偶数B.奇数C.二者都是D.二者都不是7.定轴轮系的传动比等于所有()齿数的连乘积与所有主动轮齿数的连乘积之比。
A.从动轮B.主动轮C.惰轮D.齿轮8.定轴轮系的总传动比等于各级传动比()。
A.之和B.连乘积C.之差D.平方和9.惰轮在轮系中,不影响传动比大小,只影响从动轮()。
A.旋转方向B.转速C.传动比D.齿数10.轮系的末端是螺旋传动,已知末端轴转速n=80r/min,三线螺杆的螺距为4mm,则螺母每分钟移动距离为( )mm。
A.240B.320C.960D.120011.用画箭头标注轮系旋转方向的不正确画法是( )。
A.一对外啮合圆柱齿轮箭头方向相反,内啮合箭头方向相同B.同一轴上齿轮箭头画的相反C.圆锥齿轮箭头画相对或相背同一点D.蜗杆传动时,蜗轮转向用左右手定则判别,画出箭头方向12.图示三星轮换向机构中,1为主动轮,4为从动轮,图示传动位置()。
A.一个惰轮,主、从动轮回转方向相反B.一个惰轮,主、从动轮回转方向相同C.两个惰轮,主、从动轮回转方向相同D.两个惰轮,主、从动轮回转方向相反13.一轮系有3对齿轮参加传动,经传动后,则输入轴与输出轴的旋转方向( )。
机械第五章习题
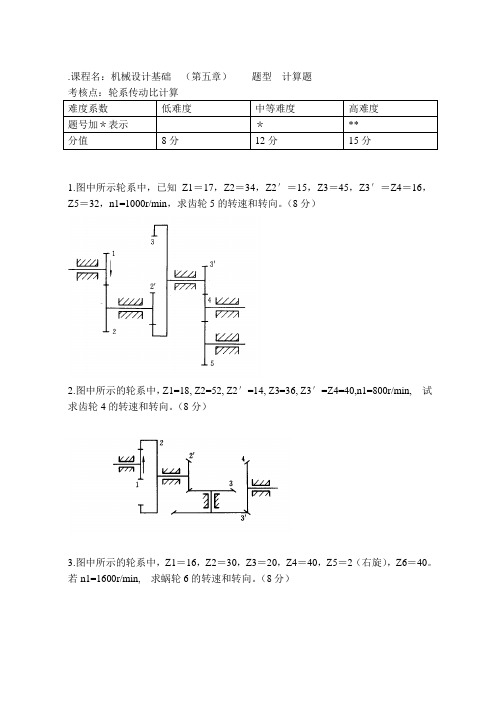
.课程名:机械设计基础(第五章)题型计算题考核点:轮系传动比计算1.图中所示轮系中,已知Z1=17,Z2=34,Z2′=15,Z3=45,Z3′=Z4=16,Z5=32,n1=1000r/min,求齿轮5的转速和转向。
(8分)2.图中所示的轮系中,Z1=18, Z2=52, Z2′=14, Z3=36, Z3′=Z4=40,n1=800r/min,试求齿轮4的转速和转向。
(8分)3.图中所示的轮系中,Z1=16,Z2=30,Z3=20,Z4=40,Z5=2(右旋),Z6=40。
若n1=1600r/min,求蜗轮6的转速和转向。
(8分)5.在图示的轮系中,已知Z1=Z2=Z4=Z5=20,Z3=Z6=60,齿轮1的转速n1=1440r/min,求齿轮6的转速和转向。
(8分)*6.在图示的轮系中,设已知双头右旋蜗杆的转速n1=900r/min,Z2=60,Z2′=25,Z3=20,Z3′=25,Z4=20,Z4′=30,Z5=35,Z5′=28,Z6=135,求轮6的转速和转向。
(12分)*7.在图示的轮系中,已知Z1=15,Z2=25,Z2′=15,Z3=30,Z3′=15,Z4=30,Z4′=2(右旋),Z5=60,Z5′=20,(m=4mm),若n1=1000r/min,求齿轮6的线速度v的大小和方向。
(12分)8.在图示的双级蜗杆传动中,右旋蜗杆1的转向如图,Z1=2,Z2=70,Z2′=2,Z3=60,试求传动比i13和判断蜗轮2和蜗轮3的转向,并以箭头在图中表示。
(8分)*9.图中所示轮系中,已知各标准直齿圆柱齿轮的齿数Z1=Z2=20,Z3′=26,Z4=30,Z4′=20,Z5=39,试计算齿轮3的齿数及传动比i15.(12分)10.图示轮系中,已知Z1=Z2′=15,Z2=45,Z3=30,Z3′=17,Z4=34。
试计算传动比i14及用箭头表示各轮的转向。
(8分)11.图示轮系中,已知Z1=2,Z2′=Z3′=20,Z3=Z4=40,Z2=50,采用右旋蜗杆,若n1=1500r/min,试求轮4的转速和转向。
机械基础轮系试题及答案

机械基础轮系试题及答案一、选择题(每题2分,共10分)1. 轮系中,若主动轮转速为n1,从动轮转速为n2,传动比i为:A. n1/n2B. n2/n1C. n1*n2D. n1-n2答案:B2. 轮系中,若主动轮齿数为Z1,从动轮齿数为Z2,传动比i为:A. Z1/Z2B. Z2/Z1C. Z1*Z2D. Z1-Z2答案:B3. 轮系中,若主动轮直径为D1,从动轮直径为D2,传动比i为:A. D1/D2B. D2/D1C. D1*D2D. D1-D2答案:B4. 轮系中,若主动轮扭矩为T1,从动轮扭矩为T2,传动比i为:A. T1/T2B. T2/T1C. T1*T2D. T1-T2答案:B5. 轮系中,若主动轮功率为P1,从动轮功率为P2,传动比i为:A. P1/P2B. P2/P1C. P1*P2D. P1-P2答案:B二、填空题(每题2分,共10分)1. 轮系中,传动比i的计算公式为_________。
答案:主动轮转速/从动轮转速或主动轮齿数/从动轮齿数或主动轮直径/从动轮直径2. 轮系中,若主动轮转速为n1,从动轮转速为n2,则传动比i=_________。
答案:n1/n23. 轮系中,若主动轮齿数为Z1,从动轮齿数为Z2,则传动比i=_________。
答案:Z1/Z24. 轮系中,若主动轮直径为D1,从动轮直径为D2,则传动比i=_________。
答案:D1/D25. 轮系中,若主动轮扭矩为T1,从动轮扭矩为T2,则传动比i=_________。
答案:T2/T1三、简答题(每题5分,共20分)1. 描述轮系中传动比的物理意义。
答案:传动比表示轮系中主动轮与从动轮转速或齿数或直径的比值,反映了轮系的减速或增速效果。
2. 轮系中,为什么主动轮与从动轮的转速比等于它们的齿数比?答案:因为轮系中齿轮的啮合关系使得主动轮与从动轮的齿数比决定了它们的转速比,即齿数多的轮转速慢,齿数少的轮转速快。
轮系总复习题及解答

第五章 轮系一.考点提要:1.定轴轮系的传动比传动时每个齿轮的几何轴线都是固定的,这种轮系称为定轴轮系。
如果若干个齿轮排成一列,即除第一个主动轮和最后一个从动轮外,其他中间的齿轮即是上一对齿轮的从动轮又是下一对齿轮的主动轮,就称为单式轮系。
如图5.1a) 所示,就是一个单式轮系.单式轮系的传动比为第一个主动轮和最后一个从动轮直接啮合的传动比,与中间齿轮的齿数无关,在计算中都会被约去,这样的齿轮称介轮或惰轮,只对转向起作用。
以图5.1a)的轮系为例:齿轮1、2的传动比和齿轮2,3的传动比分别为:122112z z n n i; 233223z zn n i 齿轮1,3的 传动比为:13231232213113))((z zz z z z n n n n n n i齿轮2是惰轮,惰轮的个数多少只改变转向,惰轮的齿数不改变传动比的值.图5.1 定轴轮系如果在一个轮系中,有的轴上有不止一个齿轮,即动力从同一根轴上的一个齿轮输入,从另一个齿轮上输出,则称之为复式轮系.复式轮系的传动比为组成该轮系的所有单式轮系的传动比之乘积.以图5.1b)的轮系为例:))(('23123'2213'21213z z z z n n n n i i i 以上结论可推广到一般情况。
设轮I 为起始主动轮,轮K 为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式为所有主动轮齿数的乘积到从所有从动轮齿数的乘积到从)(k k n n i n k k 11111(5.1)式中:n 轮系中从轮1到轮k 之间经过外啮合的次数上式所求为传动比数值的大小,当起始主动轮I 和最末从动轮K 的轴线相平行时,两轮转向的同异可用传动比的正负表达。
两轮转向相同(1n 和k n 同号)时,传动比为“+”;两轮转向相反(1n 和k n 异号)时,传动比为“—”。
在两轮的传动中,如果经过偶数次的外啮合,则传动比为正;如果经过奇数次外啮合,则传动比为负.如果在轮系中要求某两个齿轮的传动比,而其间传动要经过圆锥齿轮或蜗轮蜗杆,则两轮转向的异同一般采用画箭头的方法确定。
轮系习题
[12]图示行星轮系中,已知 Z1 Z2' 41 ,Z2 Z3 39, 试求传动比 iH 1 。
[13]图示轮系中, 已知 1 轮转向 n1 如图示。 各轮齿数为: Z1=20, Z2=40, Z3= 15, Z4=60, Z5=Z6= 18, Z7=1 (左旋蜗杆) , Z8 =40, Z9 =20 。 若 n1 =1000 r/min , 齿轮 9 的模数 m =3 mm, 试求齿条 10 的速度 v10 及其移动方向(可在图中用箭头标出) 。
3
[6]已知 i1H 10 , z1
20 ,试求图示轮系中 4 轮齿数。
[7]在图示轮系中, 已知 n1=1440 r/min 各轮齿数这 z1=z3=z6=18, z2=27, z4=z5=24, z7=81, 试求 n5 的大小并说明转向。
[8]在题图所示的手摇提升装置中,已知各轮齿数为 z1=20,z2=50,z3=15,z4=30, z6=40,z7=18,z8=51,蜗杆 z5=1 为右旋,试求传动比 i18 并确定提升重物时的转向。
4
[9]在题图所示的齿轮系中,已知各齿轮齿数(括号内为齿数),3′为单头右旋蜗杆, 求传动比 i15。
[10]在图示的轮系中,已知各轮齿数为 z1=z2=z3=z5=z6=20,已知齿轮 1、4、5、7 为同 轴线,试求该轮系的传动比 i17。
[11]在图示轮系中,已知:蜗杆为单头且右旋,转速 n1=1440r/min,转动方向如图示, 其余各轮齿数为:z2=40,z2'=20,z3=30,z3'=18,z4=54,试: (1) 说明轮系属于何种类型; (2) 计算齿轮 4 的转速 n4; (3) 在图中标出齿轮 4 的转动方向。
轮系习题

轮系一、填空题1、平面定轴轮系传动比的大小等于;从动轮的回转方向可用方法来确定。
2、所谓定轴轮系是指,而周转轮系是指。
3、在周转轮系中,轴线固定的齿轮称;兼有自转和公转的齿轮称为;而这种齿轮的动轴线所在的构件称为。
4、组成周转轮系的基本构件有:;,;5、根据轮系中齿轮的几何轴线是否固定,可将轮系分轮系、轮系和轮系三种。
6、轮系中首末两轮转速之比称为_______________ 。
7、由一系列相互啮合的齿轮组成的传动系统称为__________ 。
8、惰轮对并无映响,但却能改变从动轮的方向。
9、自由度为2的周转轮系称为,而自由度为1的周转轮系称为。
10、一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21nni——。
11、复合轮系是指。
复合轮系传动比的正确计算方法是:1);2);3);4)12、采用周转轮系可将两个独立运动为一个运动,或将一个独立的运动成两个独立的运动。
13、差动轮系的主要结构特点,是有两个。
14、周转轮系结构尺寸,重量较。
可获得的传动比和的功率传递。
15、齿轮箱的常见故障有、轴承损坏、和渗漏油、等。
16、车床上铭牌上的CQ6136是什么意思17、对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中的符号来判定。
18、差动轮系的主要结构特点,是有两个。
19、滚动轴承根据受载不同,可分为推力轴承,主要承受_______负荷;向心轴承,主要承受_______负荷;向心推力轴承,主要承受_____。
20、根据工作条件选择滚动轴承类型时,若轴的转速高,载荷小应选择______轴承。
在重载或冲击载荷下,最好选用______轴承。
21、滚动轴承内圈与轴的公差配合为______制,而外圈与座孔的配合采用______制、22、滚动轴承的主要失效形式为______和______、23、.在决定轴承尺寸时,应针对轴承的主要失效形式进行必要的计算、对于一般运转的轴承,应根据______失效,按____________进行寿命计算、对于不转动或摆动的轴承,应根据______失效,主要进行____________计算、24、内径d=20mm的轴承,其内径代号为______,内径d=15mm的轴承,其内径代号为______。
轮系答案

轮系习题答案一、填空1. 各齿轮的轴线相对机架都是固定的。
至少一个齿轮的几何轴线相对机架不是固定的。
2.中心轮 行星轮 行星架(系杆、转臂)3.中心轮,行星轮,行星架(系杆〕实际轮系的传动比,转化轮系(转化机构)的传动比4.惰轮5.2 16.转化轮系二、判断题1.Y 2.N 3.N 4.N三、计算题1.解:(1)5、6定轴轮系。
1、2、3、4 、H (5)行星轮系,构件5是系杆。
(2)2516252520201314215514=⨯⨯=⋅⋅=-=z z z z i i 2592516115=-=i (3〕5110020566556-=-=-==z z n n i (4)1259)51(259561516-=-⋅=⋅=i i i 2.解:(1) 1-2组成定轴轮系。
n n A 1= i n n z z 12122140202==-=-=- (2) 2′-3-3′- 4 - B 周转轮系,B 为系杆H 。
9.120503030111 3 2434 2 2=⨯⨯+=+=-=z z z z i i H H (3) 混合轮系8.3)9.1()2( 21211-=⨯-====H HH AB i i n n i i n B 和n A 转向相反。
3.解:.(1) 1-2组成定轴轮系n z z n 212120801000250=-=-⨯=-r/min 32n n =(2) 3-4-4′-5-B 组成周转轮系32020602010 43543335-=⨯⨯-=-=-=--=z z z z n n n n n i H H H H (3) 43=Hn n 5.62)250(41413-=-⨯===n n n H B r/min 4.解: (1) 1、2、2'、3、H 为行星轮系。
B 为系杆,4n n A =。
21323113z z z z n n n n i B B B -=--= B n z z z z n )1(32 213+= (2) 3'、4为定轴轮系。
机械设计基础第5章 轮系习题解答2
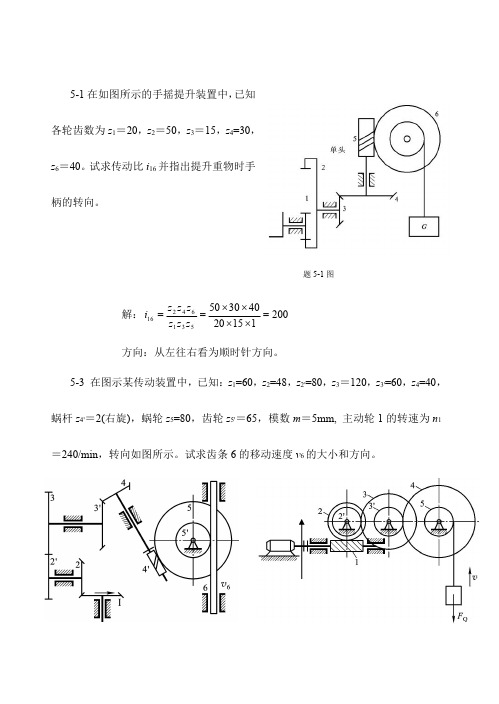
5-1在如图所示的手摇提升装置中,已知各轮齿数为z 1=20,z 2=50,z 3=15,z 4=30,z 6=40。
试求传动比i 16并指出提升重物时手柄的转向。
题5-1图解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i 方向:从左往右看为顺时针方向。
5-3在图示某传动装置中,已知:z 1=60,z 2=48,z 2'=80,z 3=120,z 3'=60,z 4=40,蜗杆z 4'=2(右旋),蜗轮z 5=80,齿轮z 5'=65,模数m =5mm,主动轮1的转速为n 1=240/min ,转向如图所示。
试求齿条6的移动速度v 6的大小和方向。
题5-3图题5-4图解:齿条的移动方向如图所示,其轮系传动比为:322608060804012048'4'3'2154325115=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i 则齿轮5’的转速为:min /5.7322401515r i n n ===又齿轮5’分度圆直径为:mm m z d 325565'5'5=⨯==所以齿条的移动速度为:s m n d v /128.0600005.73251000605'56=⨯⨯=⨯=ππ5-4如图所示为一电动卷扬机的传动简图。
已知蜗杆1为单头右旋蜗杆,蜗轮2的齿数z 2=42,其余各轮齿数为z 2'=18,z 3=78,z 3'=18,z 4=55;卷筒5与齿轮4固联,其直径D 5=400mm ,电动机转速。
n 1=1500r/min ,试求:(1)转筒5的转速n 5的人小和重物的移动速度v 。
(2)提升重物时,电动机应该以什么方向旋转?解:1.其轮系传动比为:11.5569500518181557842'3'214324114==⨯⨯⨯⨯===z z z z z z n n i 则齿轮4的转速(即转筒5的转速)为:min /70.211.556150014145r i n n n ====所以重物的移动速度为:s m n D v /057.0600007.2400100060556=⨯⨯=⨯=ππ5-5在如图所示周转轮系中,已知各轮齿数为z 1=60,z 2=20,z 2'=20,z 3=20,z 4=20,z 5=100,试求传动比i 41。