2014数学建模A题嫦娥三号软着陆轨道设计与控制策略分析
《2024年嫦娥三号自主避障软着陆控制技术》范文
《嫦娥三号自主避障软着陆控制技术》篇一一、引言随着人类对太空探索的深入,月球探测任务逐渐成为航天领域的重要一环。
嫦娥三号作为我国探月工程的重要一环,其自主避障软着陆控制技术是确保任务成功的关键技术之一。
本文将详细探讨嫦娥三号在自主避障软着陆控制技术方面的应用及所取得的成果。
二、嫦娥三号任务背景及意义嫦娥三号是我国探月工程的重要一步,其任务目标是实现月球表面的软着陆,并开展相关科学实验。
在这一过程中,自主避障软着陆控制技术起到了至关重要的作用。
此技术的成功应用,不仅为我国探月工程积累了宝贵经验,同时也为后续的深空探测提供了重要的技术支撑。
三、自主避障软着陆控制技术的核心原理嫦娥三号的自主避障软着陆控制技术主要基于先进的导航系统和精确的飞行控制算法。
导航系统通过获取月球表面的地形数据,为飞行器提供实时的环境信息。
飞行控制算法则根据这些信息,实时计算并调整飞行器的轨迹,确保其在着陆过程中能够避开障碍物,实现精确的软着陆。
四、技术实现过程及关键环节1. 障碍物探测与地形建模:嫦娥三号搭载的高精度雷达和光学设备,能够实时探测月球表面的地形信息,并建立精确的地形模型。
这一环节为后续的避障和软着陆提供了重要的数据支持。
2. 飞行轨迹规划与调整:基于探测到的地形信息和飞行控制算法,嫦娥三号能够实时规划出最佳的飞行轨迹。
在飞行过程中,根据实际情况,不断调整轨迹,确保能够避开障碍物并实现软着陆。
3. 软着陆控制策略:在接近月球表面时,嫦娥三号需采用精确的软着陆控制策略。
这一策略包括减速、稳定、着陆等多个环节,确保飞行器在着陆过程中能够保持稳定,并实现精确的着陆点。
五、技术成果及应用价值嫦娥三号的自主避障软着陆控制技术取得了显著的成果。
首先,此技术成功实现了嫦娥三号在月球表面的软着陆,为我国探月工程积累了宝贵的经验。
其次,此技术的应用提高了探月任务的成功率,降低了任务风险。
最后,此技术为后续的深空探测提供了重要的技术支撑,推动了我国航天事业的发展。
2014高教社杯全国大学生数学建模竞赛A题论文答辩
70.9 48.8 29.9 91.3 2.588 1.056 2.498
75.7 37.4 33.3 90.8 1.838 1.168 1.702
总计
1.347 2.437 2.984 3.784 2.763
求解参数N与P的关系为
N (P 3) 3
P值太大,反而会影响计算效率,因此,取
P 30 为宜。
rpGM 1.6139 103 m / s ra a
沿运动轨迹切线方向
第2页,共15页。
1.问题一:着陆准备轨道近月点和远月点的位置
加速度为:
d 2Z dt 2
e i
d 2r dt 2
r d
dt
2
i
r
d 2
dt 2
2 dr dt
d
dt
对嫦娥三号进行受力分析,由牛顿第二定律得:
mMG ei
2014年高教社杯全国大学生数学建模竞赛
A题: 嫦娥三号软着陆轨道设计
与控制策略
第1页,共15页。
1. 问题一:嫦娥三号速度的大小和方向
vp
(1 e )
(1 e )a
(1 e )
va (1 e )a
联立上式可得近月点(近拱点),远月点(远拱点)的速度:
vp
va
raGM 1.6922 103 m / s rp a
当 rp 1752.013 103 m 时,解得 cos ,则-1 ; 180
当 ra 1837.013 103 m 时,解得 cos,则1 。 0
则在近月点的位置是 (180,1752.013 103 )
远月点的位置是 (0,1837.013 103 )
第4页,共15页。
2014高教社杯全国大学生数学建模竞赛A题
2014高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。
如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A我们的报名参赛队号为(8位数字组成的编号):07033001 所属学校(请填写完整的全名):吉林师范大学博达学院参赛队员(打印并签名) :1.2.3.指导教师或指导教师组负责人(打印并签名):(论文纸质版与电子版中的以上信息必须一致,只是电子版中无需签名。
以上内容请仔细核对,提交后将不再允许做任何修改。
如填写错误,论文可能被取消评奖资格。
)日期: 2014 年 9 月 15 日赛区评阅编号(由赛区组委会评阅前进行编号):2014高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):嫦娥三号软着陆轨道设计与控制策略摘要本文针对嫦娥三号软着陆轨道设计与控制策略问题,通过提取题目中的信息,利用拱点的概念、B 样条函数逼近的统计定位方法、非线性规划问题及哈密尔顿函数为理论基础进行了完整的建模工作。
全国大学生数学建模竞赛历年赛题
全国大学生数学建模竞赛历年赛题1992:A?施肥效果分析 B?实验数据分解1993:A?非线性交调的频率设计 B?足球队排名次1994:A?逢山开路 B?锁具装箱1995:A?一个飞行管理问题 B?天车与冶炼炉的作业调度1996:A?最优捕鱼策略 B?节水洗衣机1997:A?零件参数 B?截断切割1998:A?投资的收益和风险 B?灾情巡视路线1999:A?自动化车床管理 B?钻井布局 C?煤矸石堆积 D?钻井布局2000:A?DNA序列分类 B?钢管购运 C?飞越北极 D?空洞探测2001:A?血管三维重建 B?公交车调度 C?基金使用2002:A?车灯线光源 B?彩票中数学 D?赛程安排2003:A?SARS的传播 B?露天矿生产 D?抢渡长江2004:A?奥运会临时超市网点设计 B?电力市场的输电阻塞管理C?饮酒驾车 D?公务员招聘2005:A 长江水质的评价和预测 B?DVD在线租赁C?雨量预报方法的评价 D?DVD在线租赁?2006:A出版社的资源配置 B 艾滋病疗法的评价及疗效的预测C易拉罐形状和尺寸的最优设计D 煤矿瓦斯和煤尘的监测与控制2007:A 中国人口增长预测 B 乘公交,看奥运C 手机“套餐”优惠几何D 体能测试时间安排2008:A 数码相机定位 B 高等教育学费标准探讨C 地面搜索D NBA赛程的分析与评价2009:A 制动器试验台的控制方法分析 B 眼科病床的合理安排C 卫星和飞船的跟踪测控 D会议筹备2010:A储油罐的变位识别与罐容表标定B 2010年上海世博会影响力的定量评估C输油管的布置D对学生宿舍设计方案的评价2011: A 城市表层土壤重金属污染分析B 交巡警服务平台的设置与调度C 企业退休职工养老金制度的改革D 天然肠衣搭配问题2012: A 葡萄酒的评价B 太阳能小屋的设计C 脑卒中发病环境因素分析及干预D 机器人避障问题2013: A 车道被占用对城市道路通行能力的影响B 碎纸片的拼接复原C 古塔的变形D 公共自行车服务系统2014: A 嫦娥三号软着陆轨道设计与控制策略B 创意平板折叠桌C 生猪养殖场的经营管理D 储药柜的设计2015: A ?太阳影子定位B?“互联网+”时代的出租车资源配置C? 月上柳梢头D? 众筹筑屋规划方案设计。
嫦娥三号软着陆过程(数模竞赛附件2)
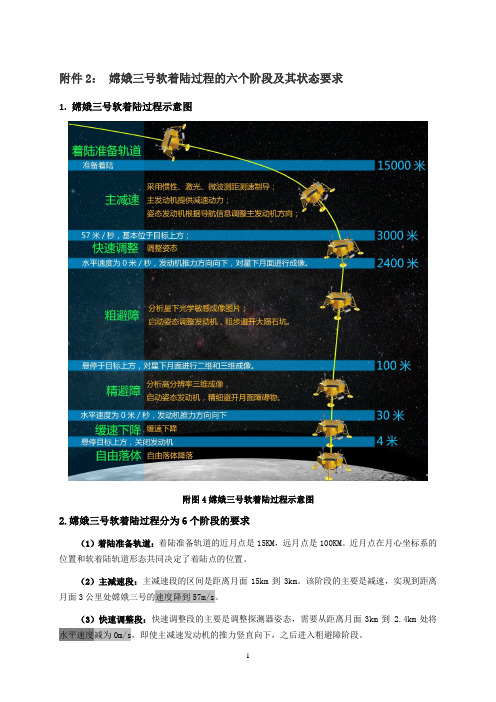
附件2:嫦娥三号软着陆过程的六个阶段及其状态要求1. 嫦娥三号软着陆过程示意图附图4嫦娥三号软着陆过程示意图2.嫦娥三号软着陆过程分为6个阶段的要求(1)着陆准备轨道:着陆准备轨道的近月点是15KM,远月点是100KM。
近月点在月心坐标系的位置和软着陆轨道形态共同决定了着陆点的位置。
(2)主减速段:主减速段的区间是距离月面15km到3km。
该阶段的主要是减速,实现到距离月面3公里处嫦娥三号的速度降到57m/s。
(3)快速调整段:快速调整段的主要是调整探测器姿态,需要从距离月面3km到 2.4km处将水平速度减为0m/s,即使主减速发动机的推力竖直向下,之后进入粗避障阶段。
(4)粗避障段:粗避障段的范围是距离月面2.4km到100m区间,其主要是要求避开大的陨石坑,实现在设计着陆点上方100m处悬停,并初步确定落月地点。
嫦娥三号在距离月面2.4km处对正下方月面2300×2300m的范围进行拍照,获得数字高程如附图5所示(相关数据文件见附件3),并嫦娥三号在月面的垂直投影位于预定着陆区域的中心位置。
附图5:距月面2400m处的数字高程图该高程图的水平分辨率是1m/像素,其数值的单位是1m。
例如数字高程图中第1行第1列的数值是102,则表示着陆区域最左上角的高程是102米。
(5)精避障段:精细避障段的区间是距离月面100m到30m。
要求嫦娥三号悬停在距离月面100m 处,对着陆点附近区域100m范围内拍摄图像,并获得三维数字高程图。
分析三维数字高程图,避开较大的陨石坑,确定最佳着陆地点,实现在着陆点上方30m处水平方向速度为0m/s。
附图6是在距离月面100m处悬停拍摄到的数字高程图(相关数据文件见附件4)。
附图6:距离月面100m处的数字高程图该数字高程的水平分辨率为0.1m/像素,高度数值的单位是0.1m。
(6)缓速下降阶段:缓速下降阶段的区间是距离月面30m到4m。
该阶段的主要任务控制着陆器在距离月面4m处的速度为0m/s(合速度),即实现在距离月面4m处相对月面静止,之后关闭发动机,使嫦娥三号自由落体到精确有落月点。
2014高教社杯全国大学生数学建模竞赛(A)题目
2014高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题嫦娥三号软着陆轨道设计与控制策略嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为 2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。
嫦娥三号的预定着陆点为19.51W,44.12N,海拔为-2641m(见附件1)。
嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。
其着陆轨道设计的基本要求:着陆准备轨道为近月点15km,远月点100km的椭圆形轨道;着陆轨道为从近月点至着陆点,其软着陆过程共分为6个阶段(见附件2),要求满足每个阶段在关键点所处的状态;尽量减少软着陆过程的燃料消耗。
根据上述的基本要求,请你们建立数学模型解决下面的问题:(1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
(2)确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
(3)对于你们设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
附件1:问题的背景与参考资料;附件2:嫦娥三号着陆过程的六个阶段及其状态要求;附件3:距月面2400m处的数字高程图;附件4:距月面100m处的数字高程图。
附件1:问题A的背景与参考资料1.中新网12月12日电(记者姚培硕)根据计划,嫦娥三号将在北京时间12月14号在月球表面实施软着陆。
嫦娥三号如何实现软着陆以及能否成功成为外界关注焦点。
目前,全球仅有美国、前苏联成功实施了13次无人月球表面软着陆。
北京时间12月10日晚,嫦娥三号已经成功降轨进入预定的月面着陆准备轨道,这是嫦娥三号“落月”前最后一次轨道调整。
《2024年嫦娥三号自主避障软着陆控制技术》范文

《嫦娥三号自主避障软着陆控制技术》篇一一、引言随着中国航天事业的飞速发展,嫦娥三号探测器作为我国探月工程的重要一环,其自主避障软着陆控制技术成为了国内外关注的焦点。
本文将详细介绍嫦娥三号探测器在自主避障软着陆控制技术方面的研究背景、意义及国内外研究现状,旨在为后续的科研工作提供参考。
二、嫦娥三号探测器背景及意义嫦娥三号探测器是我国探月工程二期的重要任务之一,其目标是在月球表面实现软着陆并进行科学探测。
在月球表面着陆过程中,由于月球表面地形复杂,存在大量陨石坑、山体等障碍物,因此如何实现自主避障成为了关键技术之一。
研究嫦娥三号自主避障软着陆控制技术,对于提高我国探月工程的成功率、推动我国航天事业的发展具有重要意义。
三、国内外研究现状目前,国内外对于自主避障软着陆控制技术的研究主要集中在以下几个方面:一是探测器与月球表面的环境感知技术,二是避障算法的研究与优化,三是着陆控制策略的制定与实施。
在环境感知技术方面,国内外学者主要通过雷达、激光、视觉等多种传感器进行探测器与月球表面的信息获取。
在避障算法方面,研究人员通过不断优化算法,提高探测器在复杂地形下的避障能力。
在着陆控制策略方面,研究人员制定了多种控制策略,以适应不同的着陆环境。
四、嫦娥三号自主避障软着陆控制技术嫦娥三号探测器采用了多种技术手段实现自主避障软着陆控制。
首先,探测器搭载了高精度的雷达和视觉传感器,实现了对月球表面环境的精准感知。
其次,探测器采用了先进的避障算法,能够在复杂地形下实现自主避障。
最后,探测器制定了多种着陆控制策略,根据不同的着陆环境选择最合适的策略。
在避障算法方面,嫦娥三号探测器采用了基于人工智能的算法,通过机器学习实现对月球表面环境的自适应识别和避障。
同时,探测器还采用了多种传感器融合技术,提高了信息获取的准确性和可靠性。
在着陆控制策略方面,嫦娥三号探测器制定了多种策略,包括基于模型预测控制的策略、基于滑模变结构的策略等。
2014-高教社杯全国大学生数学建模竞赛AB题评阅要点
2021 高教社杯全国大学生数学建模比赛A 题评阅要点[说明]本要点仅供参考, 各赛区评阅组应根据对题目的理解及学生的解答, 自主地进行评阅。
对本问题应该给出合理的建模假定, 譬如: 惯性坐标、二体问题等, 并加以分析说明。
问题1: 在已知的条件下, 确定嫦娥三号在环月轨道上近月点与远月点的相对位置和速度(1) 建立合理适用的坐标系。
(2) 对嫦娥三号进行受力分析, 建立其运动学和准备轨道的数学模型(譬如: 微分方程等模型) 。
(3) 通过求解数学模型得. 到数值结果。
问题2: 确定软着陆轨道与6 阶段的控制策略由问题对着陆轨道 6 个阶段的要求, 每个阶段都应给出起止状态(速度和位置) 和最优控制策略(推力大小和方向) , 以满足各阶段起止状态的需求。
(1) 建立各阶段的最优控制模型, 明确给出控制变量、状态变量、状态方程、约束条件和目标函数。
(2) 在粗避障和精细避障阶段挑选落点时, 需要综合考虑月面的平整度、光照条件、着陆控制误差等因素, 确定最理想的着陆地点。
(3) 各阶段的控制问题是一个无穷维的优化问题, 可以通过合理的简化(譬如离散化为有限维的优化问题) 求解得. 到合理的数值结果, 即最优的控制策略。
(4) 若未按题目要求按6 阶段设计最优控制策略, 而照抄某些文献的两阶段或三阶段的处理方法, 不能视为较好的论文。
问题3: 着陆轨道设计和控制策略的误差分析与敏感度分析对问题的稳定性有影响的误差包括:(1) 着陆准备轨道参数(近月点位置和速度) 的误差;(2) 分阶段分析发动机推力(大小和方向) 的控制误差;(3) 模型的简化假定、模型的近似与求解过程等综合分析误差;加入能针对以上几个因素对问题结果的影响及程度做相应的敏感度分析, 应给予肯定。
2021高教社杯全国大学生数学建模比赛B题评阅要点[说明]本要点仅供参考, 各赛区评阅组应根据对题目的理解及学生的解答, 自主地进行评阅。
本题主要考查学生对直纹面的描述、建模和计算功底。
2014年数学建模A题-省一等奖
关键词:软着陆、SQP算法、轨道优化、景象匹配
1
一
1.1 问题的背景
问题重述
中国是继美国、前苏联之后的第三个能使卫星登上月球实现软着陆的国家。因此, 嫦娥三号如何实现软着陆以及能否成功成为外界关注的焦点。北京时间 12 月 10 日晚, 嫦娥三号已经成功降轨进入预定的月面着陆准备轨道,这是嫦娥三号“落月”前最后一 次轨道调整。在实施软着陆之前,嫦娥三号还将在这条近月点高度约 15 公里、远月点 高度约 100 公里的椭圆轨道上继续飞行。 嫦娥三号着陆地点选在较为平坦的虹湾区。但由于月球地形的不确定性,最终“落 月”地点的选择仍存在一定难度。但嫦娥三号的预定着陆点为 19.51W,44.12N,海拔为 -2641m。在大约距离月球 15 公里时,反推发动机就要点火工作;到离月球 100 米时, 卫星将暂时处于悬停状态,此时它已不受地球上工程人员的控制,因卫星上携带的着陆 器具有很高智能,它会自动选择一块平整的地方降下去,并在离月球表面 4 米的时候关 闭推进器,卫星呈自由落体降落,确保软着陆成功。为了确保探测器能够成功在月球表 面实现软着陆,需要认真设计降落过程中探测器的发动机的控制方案,使“嫦娥 3 号” 能够顺利完成科研任务,得到最大化的应用。由于月球上没有大气,嫦娥三号无法依靠 降落伞着陆,只能靠变推力发动机,才能完成中途修正、近月制动、动力下降、悬停段 等软着陆任务。 这将是中国航天器首次在地外天体的软着陆和巡视勘探, 同时也是 1976 年后人类探测器首次的落月探测。 嫦娥三号在着陆准备轨道上的运行质量为 2.4t, 其安装在下部的主减速发动机能够 产生 1500N 到 7500N 的可调节推力。在给定主减速发动机的推力方向后,能够自动通过 多个发动机的脉冲组合实现各种姿态的调整控制。 要保证准确地在月球预定区域内实现 软着陆,关键问题是着陆轨道与控制策略的设计。其着陆轨道设计的基本要求:着陆准 备轨道为近月点 15km,远月点 100km 的椭圆形轨道;着陆轨道为从近月点至着陆点,其 软着陆过程共分为 6 个阶段,要求满足每个阶段在关键点所处的状态;尽量减少软着陆 过程的燃料消耗。 1.2 提出问题 根据上述的叙述以及基本要求,提出以下三个问题: (1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与 方向。
嫦娥三号软着陆过程简介
1.嫦娥三号软着陆过程简介1.1 着陆准备轨道:着陆准备轨道即在进行改变探测器速度前的准备阶段。
此时探测器还在椭圆轨道上,轨道的近月点是15km远月点是100kn。
为确定探测器着陆点的位置,我们需确定近月点在月心坐标系的位置和软着陆轨道形态。
1.2 主减速段:主减速段主要任务即将探测器的飞行速度降到57m/s。
该段区间是距离月球表面15km到3km采用惯性、激光、微波测距测速制导;使用主发动机来提供动力,姿态发动机来改变主发动机即加速度的方向。
1.3 快速调整段:快速调整段的主要是利用姿态发动机,调整探测器姿态,使其在距离月面3km到2.4km这段区间内完成将水平速度减为0m/s的任务,即使主减速发动机的推力竖直向下进入粗避障阶段。
1.4 粗避障段:粗避障段的范围是距离月面2.4km到100m区间,其主要是分析星光下光学敏感成像图片,启动姿态发动机,粗步避开大的陨石坑,实现在设计着陆点上方100m处悬停,并初步确定落月地点。
1.5 精避障段:精细避障段的区间是距离月面100m到30m要求嫦娥三号悬停在距离月面100m 处,对着陆点附近区域100m范围内拍摄图像,并获得三维数字高程图。
分析三维数字高程图,避开较大的陨石坑,确定最佳着陆地点,实现在着陆点上方30m处水平方向速度为0m/s。
1.6 缓速下降阶段:缓速下降段主要是保证着陆月面的速度和姿态控制精度,要以较小的设定速度匀速垂直下降, 消除水平速度和加速度, 保持着陆器水平位置, 之后关闭发动机。
缓速下降阶段的区间是距离月面30m到4m要求着陆器在距离月面4m处的速度为0m/s,即实现在距离月面4m处相对月面静止,之后关闭发动机,使嫦娥三号自由落体到精确有落月点。
嫦娥三号软着陆各阶段的轨迹如图()所示2.各阶段控制策略2.1主减速段设探测器在近月点处的速度为 V,垂直方向速度为V y ,速度方向与水平方向的夹 角为B 调整发动机方向,使发动机方向沿着垂直轴方向并保持加速度大小不变, 故探测器在此阶段只在垂直方向有加速度,探测器在垂直方向运动了 12000米, 速度减至为56m/s ,因此要满足方程,由此可以解出加速度a 和主减速阶段所需要的时间t2.2快速调整段利用姿态发动机,调整探测器姿态,使其在距离月面 3km 到2.4km 这段区间内完成将水平速度减为0m/s 的任务,即使主减速发动机的推力竖直向下进入粗 避障阶段。
数学建模获奖论文A题-嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略摘要随着人类的进步和科技的发展,人类对太空和月球的探索已经取得了很大的进步。
我国的探月工程项目也一直走在世界前列。
嫦娥三号是我国首次实行外天体软着陆任务的飞行器,在世界上首先实现了地外天体软着陆自主避障。
对于嫦娥三号软着陆过程虽然有很多的研究成果,但这仍然是一个永远值得我们研究的问题。
本文首先分析了嫦娥三号运行轨道的近月点和远月点的速度,然后确定了近月点和远月点的位置。
在这基础上,对嫦娥三号软着陆轨道进行拟合确定,通过制导技术分析六个阶段最优控制策略。
最后,对确定的轨道和最优控制策略进行误差分析和敏感性分析。
在对问题一近月点和远月点位置确定和速度分析时,本文建立了动力学模型,通过万有引力定律求得在近月点的飞行速度为1.67km/s,在远月点的速度为1.63km/s,然后用微元迭代的方法,解得近月点的位置19.51W,32.67N,15km,远月点的位置160.49E,32.67S,100km。
在轨道的确定过程中,为了便于研究,将嫦娥三号软着陆的轨道划分为三个阶段。
第一个阶段是从近月点到距月球表面2400米的高空,在这一阶段的研究中,本文建立了基于软着陆二维动力学模型,然后根据所得到的数据确定轨道,进而用MATLAB拟合出轨道。
第二阶段是从距月球表面2400米到4米,考虑到要避开月球表面障碍物,所以,用MATLAB将附件 3中的图像进行平面和三维作图,从而根据所做出的图像确定出此阶段的运行轨道。
在第三阶段的划分是嫦娥三号从4米处开始做自由落体运动,这个阶段的轨迹是一条直线。
在六个阶段运动过程的最优控制策略研究中,首先运用显示制导法进行六个阶段燃料的最优控制,约束条件是嫦娥三号在每个阶段燃料的使用尽量少。
然后用模拟退火遗传算法对六个阶段的轨道最优化进行设计,得出嫦娥三号着陆过程每个阶段最优轨道控制,通过避障制导技术得出嫦娥三号软着陆六个阶段的最优控制策略。
关键词:二维动力学模型最优控制策略显示制导法一. 问题重述嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
嫦娥三号软着陆轨道设计与控制策略
嫦娥三号软着陆轨道设计与控制策略引言嫦娥三号(Chang'e-3)是中国国家航天局(CNSA)于2013年发射的探月任务。
作为中国首个实现月面软着陆的任务,嫦娥三号的轨道设计与控制策略至关重要。
本文将探讨嫦娥三号的软着陆轨道设计以及相应的控制策略。
一、轨道设计1.1 软着陆的定义软着陆是指在着陆过程中,飞船的速度和加速度较小,从而减小着陆冲击力,降低着陆事故的风险。
嫦娥三号软着陆的主要目标是保证飞船及上面搭载的月球车的安全着陆。
1.2 轨道选择嫦娥三号选择了椭圆轨道进行软着陆。
这是因为椭圆轨道在进入月球表面前可以实现速度和加速度的逐渐减小,从而使得软着陆更加稳定和可控。
1.3 轨道参数设计在确定椭圆轨道之后,嫦娥三号需要确定相应的轨道参数。
这些参数包括轨道离心率、轨道倾角和轨道高度等。
通过科学计算和仿真分析,嫦娥三号确定了具体的轨道参数,以便使得软着陆能够满足任务要求。
二、控制策略2.1 控制模式嫦娥三号软着陆的控制策略采取了主动控制模式。
这意味着在着陆过程中,飞船将根据实时数据进行主动调整,以保证软着陆的稳定和安全。
2.2 触发条件在软着陆的控制策略中,触发条件是十分重要的。
嫦娥三号采取了多个触发条件,包括高度、速度和倾斜度等。
当这些条件满足一定的阈值时,控制系统将自动开始软着陆程序。
2.3 控制手段嫦娥三号软着陆采用了多种控制手段,以确保着陆过程的精确控制。
其中包括推力控制、姿态控制和舵控制等。
这些控制手段能够对飞船的速度、姿态和角度进行实时调整,以实现软着陆的最佳效果。
2.4 控制算法为了实现软着陆的精确控制,嫦娥三号采用了高级的控制算法。
这些算法包括PID控制、模糊控制和神经网络控制等。
通过这些算法,嫦娥三号能够根据实时数据进行精确的控制,并及时作出调整,以确保软着陆的成功。
结论嫦娥三号软着陆轨道设计与控制策略在实现月面软着陆任务中起到了重要的作用。
通过适当的轨道设计和精确的控制策略,嫦娥三号成功实现了月球表面的软着陆,并为未来的探月任务提供了宝贵的经验。
2014年全国数学建模大赛A题
2014高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。
如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A 我们的报名参赛队号为(8位数字组成的编号):25001113所属学校(请填写完整的全名):云南大学参赛队员(打印并签名) :1. 林博文2. 张竞文3. 方春晖指导教师或指导教师组负责人(打印并签名):李海燕(论文纸质版与电子版中的以上信息必须一致,只是电子版中无需签名。
以上内容请仔细核对,提交后将不再允许做任何修改。
如填写错误,论文可能被取消评奖资格。
)日期:2014年9月15日赛区评阅编号(由赛区组委会评阅前进行编号):2014高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):嫦娥三号软着陆轨道设计与控制策略优化摘 要 嫦娥三号是中国国家航天局嫦娥工程第二阶段的登月探测器,包括着陆器和玉兔号月球车。
嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。
探月着陆器软着陆轨道设计与控制策略
DOI:10.16660/ki.1674-098X.2019.13.016探月着陆器软着陆轨道设计与控制策略①赵晓旭 高聪 于丰韬(华北理工大学理学院 河北唐山 063210)摘 要:嫦娥三号的软着陆,标志着我国实现了通过程序编码实现机器自主避障着陆地外星体的伟大成就,而着陆轨道与控制策略的制定与设计则是成功软着陆过程中极为重要因素。
本文以嫦娥三号探月着陆相关数据利用迭代计算,微分方程等方法,建立落月着陆轨道与控制策略的模型,并根据安全原则与燃耗最小原则对模型进行合理的轨道设计与着陆路径优化,为探月飞行器的软着陆与轨道设计提供方法。
关键词:软着陆 迭代法 微分方程 非线性规划 最优控制策略中图分类号:V463 文献标识码:A 文章编号:1674-098X(2019)05(a)-0016-02①作者简介:赵晓旭(1997,7—),男,汉族,河南遂平人,本科,研究方向:统计与数学建模。
月球是地球周围唯一的天然卫星,其表面蕴含着丰富的矿物资源,开采月球资源成为解决现今能源问题的一种方法。
由于月球上没有大气层的包裹,飞行器的着陆必须完全依赖发动机的制动。
1 软着陆轨道设计与控制模型建立与求解1.1 减速模型1.1.1 主减速阶段在确定了嫦娥三号卫星近、远月点速度大小与方向后,根据嫦娥三号着陆器参数建立动态微分方程:边界条件:x (t 0)=0,y (t 0)=15000+R ,v x (t 0)=v 0=1614.4,v y (t0)=0,由于主减速运时主推动器需全功率运行,即F 取最大推力7200N且推动器不会频繁改变角度,因此a (t )是一光滑函数。
可将求解控制函数a (t )问题转换为求解最优参数及最短时间问题。
我们采用迭代的方法计算可得最优参数P =(4.862*10-6,-1.079*10-4,,4.785*10-2),时间最短为445s,在主减速结束时刻的水平速度为26.2320m/s,竖直方向速度为53.5072m/s,消耗燃料质量为1132.7kg。
嫦娥三号
(2)建立最优控制模型。
设计主减速段制导控制律(采用燃料最优制导律)针对主减速阶段,卫星主发动机运作进行减速,整个阶段卫星进行抛物体运动,并在此阶段内实现速度从1.7千米/秒降到0米/秒。1主减速模式,卫星主发动机运作进行减速,整个阶段卫星进行抛物体运动设计快速调整段制导律(采用重力转弯制导)设计粗避障段制导律(参考火星动力下降段制导律,可采用D’Souza 制导,或多项式制导, 将平坦区域作为目标着陆点,从而避开岩石)分析星下光学敏感成像图片,启动姿态调整发动机进行水平位移,粗步避开大陨石坑,并进行减速运动,在末阶段实现卫星悬停于目标位置上方。同设计精避障段制导律(参考火星动力下降段制导律,可采用D’Souza 制导,或多项式制导, 将平坦区域作为目标着陆点,从而避开岩石)分析高分辨率三维成像启动姿态调整发动机进行水平位移,精细避开月面障碍物,主发动机产生恰好抵消自身重力的推力,维持稳定下降,经过调整,实现水平速度为0米/秒
根据上述的基本要求,建立数学模型解决下面的问题:
(1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
(2)确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
(3)对于设计的着陆轨道和控制策略做相应的误差分析和误差分析。
二、模型假设
(1)假设嫦娥三号的软着陆不受月球自转影响;
(2)假设嫦娥三号水平调位耗能极低可约为零;
(3)月球、日地引力摄动等因素均可忽略不计;
(4)忽略除地球以外的其他因素对飞船运动的影响。
三、符号说明
符号
符号说明
嫦娥三号在A点的机械能
嫦娥三号在B点的机械能
近月点到月心的距离
远月点到月心的距离
嫦娥三号经过近月点的速度
2014全国大学生数学建模a题
2014高教社杯全国大学生数学建模竞赛a题摘要2013年嫦娥三号成功发射,标志着我国航天事业上的又一个里程碑,针对嫦娥三号软着陆问题,分别建立着陆前轨道准备模型和软着陆轨道模型,建立动力学方程,以燃料最省为目标进行求解。
问题一:在软着陆前准备轨道上利用开普勒定律、能量守恒定律以及卫星轨道的相关知识,利用牛顿迭代法分别确定了近月点和远月点的速度分别为 1.6925km/s、1.6142km/s,位置分别为(19.91W,20.96N),(160.49E,69.31S)。
问题二:在较为复杂的软着陆阶段,因为相对于月球的半径,嫦娥三号到月球的表面的距离太小,如果以月球中心建立坐标系会造成比较大的误差,因此选择在月球表面建立直角坐标系,在主减速阶段的类平抛面上建立相应的动力学模型,求出关键点的状态和并设计出相应的轨道,接下来通过利用灰度值阀值分割方法和螺旋搜索法对粗避障阶段和精避障阶段的地面地形进行相应的分析,找出安全点,然后调整嫦娥三号的方向以便安全降落,最后在落地时通过姿态发动机调整探测器的姿态,使之可以平稳的落到安全点上,在以上的各个阶段都可以以燃料最省为最优指标,从而建立非线性的最优规划的动力学模型,并基于该动力学模型可以对各个阶段的制导率进行优化设计由此就可以得到各个阶段的最优控制策略,问题三:最后针对所设计的轨道和各个阶段的控制策略进行了误差分析和灵敏度分析。
对系统误差和偶然误差都做了解释;通过灵敏度分析发现,嫦娥三号在近月点的位置对结果的影响最大。
关键字牛顿迭代法,灰度值阀值分割,螺旋搜索法,灵敏度分析一、问题重述嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为 2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。
嫦娥三号软着陆轨道设计与控制策略的优化模型_杜剑平模板
)的模型建立与求解 3 问题 1
3. 1 确定近月点和远月点的速度 由假设 2. 嫦娥三号从近月点开始下落 , 且与着陆准备轨道在同一个平面上 。 又由假设 2. 3, 1 和 2. 2
1] 。 知, 嫦娥三号的着陆准备轨道满足开普勒轨道定律 , 其着陆准备轨道如图 1 所示 [
远月点至月心的距离为 设近月 点 至 月 心 的 距 离 为 r A, 单位时间嫦娥三号扫过的面积为 r B, 1 1 r vA , S r vB , A B = B 2 2
竞赛论坛
檺檺殣
1 问题的提出
在高速飞行的情况下 , 嫦娥三号要保证准确地在月球预定区域实现软着陆 , 关键问题是着陆轨道与 远月点 1 控制策略的设计 。 基本要求是 : 着陆准备轨道为近月点 1 着陆轨道 m, m 的椭圆形轨道 ; 5k 0 0k 为从近月点至着陆点 , 其软着陆过程共分为 6 个阶段 , 要求满足每个阶 段 在 关 键 点 所 处 的 状 态 ; 尽量减 少软着陆过程的燃料消耗 。 根据上述基本要求 , 要研究以下 3 个问题 : )确定着陆准备轨道近月点和远月点的位置以及嫦娥三号的相应速度 ; 1 )确定嫦娥三号的着陆轨道和 6 个阶段的最优控制策略 ; 2 )针对建立的模型 , 对所设计的着陆轨道与控制策略做相应的误差分析和敏感性分析 。 3
6 - / , 嫦娥三号所受到的最大离心加速度为 由于月球自转速度为 ω = 2. 6 6 1 7×1 r a d s 0 2 2 5 - ( / ) 。 k s 2 3 9 6×1 0 α = ωr ≈ 1. g 2 5 - / 即 将非惯性坐标系近似为惯性坐标系 , 的加速度误差 , 最大可能产生1. 远小于月球引 k s 0 2 3 9 6×1 g
的引力加速度为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
承诺书我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛下载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括、电子、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。
如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A我们的报名参赛队号为(8位数字组成的编号):13003024所属学校(请填写完整的全名):理工学院参赛队员(打印并签名) :1. 煌2. 江泽鹏3. 章芳敏指导教师或指导教师组负责人(打印并签名):王琛晖(论文纸质版与电子版中的以上信息必须一致,只是电子版中无需签名。
以上容请仔细核对,提交后将不再允许做任何修改。
如填写错误,论文可能被取消评奖资格。
)日期: 2014 年 9 月 14日赛区评阅编号(由赛区组委会评阅前进行编号):编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):嫦娥三号软着陆轨道设计与控制策略摘要嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域实现软着陆,关键问题是着陆轨道与控制策略的设计。
由于月球上没有大气,嫦娥三号无法依靠降落伞着陆,只能靠变推力发动机,才能完成中途修正、近月制动、动力下降、悬停段等软着陆任务。
本文在着陆轨道设计的基本要求下,建立最优控制模型满足了每个阶段嫦娥三号在关键点所处的状态,以尽量减少软着陆过程燃料消耗的原则,完成了对三个问题的分析探究。
针对问题1,本文将嫦娥三号作为质点,根据椭圆公式求出半焦距的长度,采用适用于一切二体问题的开普勒第三定律模型,计算出近月点和远月点相应的速度大小,近月点速度为1.69204 KM/S,远月点速度为1.61390 KM/S,之后再通过给出的着陆点的方向反推出嫦娥三号相应的方向。
针对问题2,本文研究了一种应用参数化控制求解月球探测器精确定点软着陆最优控制问题的方法。
首先用约束变换技术将小等式约束进行了近似处理,而后利用若十个分段的常数去逼近最优解,再根据强化技术通过时间轴上的变换,将每一段参数的持续时间转变为一组新的参数,于是最优控制问题被转化为一系列参数优化问题。
最后应用经典的参数优化方法即可求得最优控制函数的一个近似解,通过增加参数个数,重复优化得到逼近连续最优解的参数化解。
同时在优化过程中考虑了制动初始点的选取对结果的影响。
运用matlab软件绘制着陆轨道的曲线,结果表明了所提设计方法足简单、有效的。
得到最优初始点坐标为X0=837.71 km,Y=1423.9 km,Z=586.26 km。
针对问题3,本文根据月球探测器向月飞行轨道动力学方程式得到了飞行轨道误差的迭代方程,采用协方差分析方法对轨道初始误差的误差源造成的轨道误差进行了分析,结合具体算例,给出了探测器初始轨道位置和速度误差引起的向月飞行轨道误差的时间历程和轨道终点误差。
计算结果表明,在发射嫦娥三号卫星过程中,必须进行多次中途轨道修正。
关键词:定点软着陆,最优控制,参数化控制,轨道误差,协方差分析方法1问题重述嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。
嫦娥三号在着陆准备轨道上的运行质量为2.4t,其安装在下部的主减速发动机能够产生1500N到7500N 的可调节推力,其比冲(即单位质量的推进剂产生的推力)为2940m/s,可以满足调整速度的控制要求。
在四周安装有姿态调整发动机,在给定主减速发动机的推力方向后,能够自动通过多个发动机的脉冲组合实现各种姿态的调整控制。
嫦娥三号的预定着陆点为19.51W,44.12N,海拔为-2641m(见附件1)。
嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域实现软着陆,关键问题是着陆轨道与控制策略的设计。
其着陆轨道设计的基本要求:着陆准备轨道为近月点15km,远月点100km的椭圆形轨道;着陆轨道为从近月点至着陆点,其软着陆过程共分为6个阶段(见附件2),要求满足每个阶段在关键点所处的状态;尽量减少软着陆过程的燃料消耗。
根据上述的基本要求,请你们建立数学模型解决下面的问题:问题一:确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
问题二:确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
问题三:对于你们设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
2模型假设1. 忽略太阳、地球对嫦娥三号卫星的引力2.将月球近视为一个质量均匀的标准球体3. 将嫦娥三号视为一个质点4.主减速忽略动作调整所产生的燃料消耗5.制动发动机推力可变6.图片所给数据真实可靠3符号说明v………………………………………………………………………………近月点速度.A v………………………………………………………………………………远月点速度.B o……………………………………………………………………………惯性坐标系.xyzO L L L………………………………………………………………………月固坐标系.x y z.F………………………………………………………………………………发动机推力.m………………………………………………………………………………探测器质量.C……………………………………………………………………………制动火箭的比冲r…………………………………………………………………………………月球半径.f.°G…………………………………………………………………………………约束函数.j ∧…………………………………………………………………………………指标函数 .u …………………………………………………………………………………控制变量 .τ…………………………………………………………………………………调节参数 .θ…………………………………………………………………P 与Ay1轴正向所成夹角 .ψ…………………………………………P 在x1Az1平面上的投影与Ax1轴负向所成夹角 .α…………………………………………Ax1在xOz 平面上的投影与Ox 轴正向所成夹角 .β…………………………………………………………………………Ay1与Oy 所成夹角 .γ……………………………………月球自转而产生的固坐标系相对惯性坐标系的转角4 模型的建立与求解4.1 问题一确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的大小与方向。
4.1.1 问题一的分析开普勒定律适用于宇宙中一切绕心的天体运动。
在宏观低速天体运动领域具有普遍意义。
对于高速的天体运动,开普勒定律提供了其回归低速状态的方程。
根据附件1和附件2中给出的数据资料,近月点和远月点的相对距离都是已知的。
本问题的模型解答可以根据椭圆公式求出半焦距的长度,然后利用适用于一切二体问题的开普勒第三定律计算出近月点和远月点相应的速度大小,之后再通过给出的着陆点的方向反推出嫦娥三号相应的方向。
4.1.2 问题一的解答图1 开普勒第三定律模型在图1中,A ,B 分别为嫦娥三号运动的近月点和远月点,以 和 分别表示嫦娥三号在该点的速度,由于速度沿轨道切线方向,可见和的方向均与此椭圆的长轴垂直,则嫦娥三号在此两点时对应的面积速度分别为图2 嫦娥三号软着陆曲线模型由图2可知,NS平面为着陆的那个平面,A点为着陆点,A点在NS的平面坐标为19.51W,44.12N,B点为嫦娥三号的近月点,根据题意近月点到月球表面的距离为15km,又有着陆点的海拔为-2641m,所以有OB的距离为17641m,因此可以得出近月点的速度方向为(19.51W,44.12N,17641),根据近月点和远月点处在同一轨道,并且共线,所以远月点的方向和近月点刚好相反,高度都为17641m,因此可得出远月点的速度方向为(19.51E,44.12S,17641)。
近月点速度为1.69204 KM/S,远月点速度为1.61390 KM/S。
4.2 问题二确定嫦娥三号的着陆轨道和在6个阶段的最优控制策略。
4.2.1问题二的分析探测器经过环月轨道的软着陆方式因其具有较长的软着陆准备时间、对着陆位置的限制比较小以及减少着陆舱部分的燃料消耗等优点故而被广泛采用。
该方式的关键环节就是从距离月面15 km的近月点至月面的动力下降过程。
在本问题的分析中,模型考虑了月球自转,针对三维空间精确定点软着陆问题,利用参数化控制解决了变推力软着陆最优控制问题,此外还针对仅知制动初始点到月心距离而具体位置未知的情况,对初始点的选取进行了研究。
4.2.2问题二的解答1. 动力学模型建立与控制律设计探月飞行器首先进行霍曼变轨,从圆形环月轨道进入一条近月点高度为15 km的椭圆轨道;当到达近月点时,制动发动机点火,探测器进人动力下降段,最终以很小的相对速度(小于6 m/s)降落到月面指定位置。
图3坐标示意图如图3坐标示意图所示,定义惯性坐标系Oxyz,原点在月心,参考平面是月球赤道面,Ox轴指的是月球赤道相对于白道的升交点,Oy轴指向月球自转角速度方向,Oz轴按右手坐标系确定。
再定义月固坐标系OxLyLzL, 以月球赤道面为参考面,OxL轴指向赤道面与起始子午面的交线方向,OyL指向月球自转角速度方向,OzL轴按右手坐标系确定。
Ax1y1z1为原点在探测器质心的轨道坐标系,Ay1指向从月心到着陆器的延伸线方向,Ax1垂直Ay1指向运动方向,Az1按右手坐标系确定。
制动发动机推力P的方向与探测器纵轴重合,θ为P与Ay1轴正向所成夹角,ψ为P再x1Az1平面上的投影与Ax1轴负向所成夹角。
β为Ay1与Oy所成夹角,α为Ax1在xOz平面上的投影与Ox轴正向所成夹角。
γ为月球自转而产生的固坐标系相对惯性坐标系的转角,不妨假设初始时刻月固坐标系与惯性坐标系重合。
显然有轨道坐标系到惯性坐标系转换矩阵1cos cos sin sin cos cos sin cos sin sin sin0cosTαββαβαββαβαα-⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦惯性坐标系到月固坐标系的转换矩阵为2cos 0sin 010sin 0cos T γγγγ-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦根据牛顿第二定律,结合科氏定律整理可以得到探测器在月固坐标系中的运动方程为..21.sin cos 2cos 02sin sin xL xL L zL yL yL L xL zL zL F m g V F T T g m V g F m V V V ωωϑψϑϑψ⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦其中VxL,VyL 和VzL 为探测器速度矢量在月固坐标系各轴上的投影,F 为发动机推力,m 为探测器质量,gxL,gyL 和gzL 为该高度月球重力加速度在月固坐标系各轴上的投影,wL 为月球自转角速度。