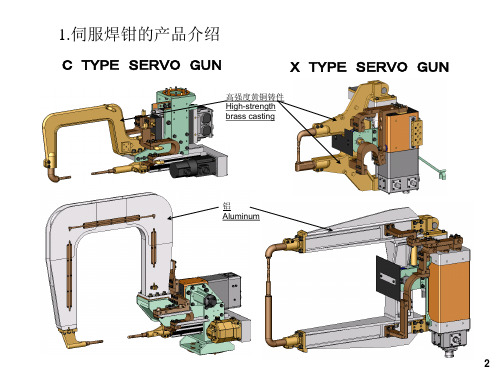
FANUC伺服焊枪介绍
FANUC伺服焊枪操作手册

JX5 接头
脉冲编码器连接电缆,用 于传递脉宽调制信号,控 制伺服电机
马达动力线,用于传 递 200V 电源,供伺 服电机工作
地址:上海市宝山区富联 1500 号 电话: 021 — 5032 7700
邮编: 201906 传真: 021 — 5032 7711
5.设定焊接信号
由于伺服枪的送丝和送气均由机器人单方控制,与焊机通讯是否成功无关。 故焊机通讯成功后,保护气体控制信号未被自动分配。 按下 MENUI/OWeld,出现如下画面:
按下 F3 IN/OUT,切换到焊接输出信号画面,找到 Gas Start 信号,按下 CONFIG 进去,对 Gas Start 信号进行如下分配:
6.负载设定
1.负载设定的必要性: 由于伺服焊枪具有一定的重量(约为 5kg) ,我们需要进行负载设定。以提 高机器人如下性能: (1).提高动作性能(振动减少,循环时间改善) 。 (2) .更加有效的发挥与动力学相关的功能 (提高冲撞检测功能和重力补偿功能) 2.负载设定的步骤 (1)将机器人移动至合适位置.一般情况下,建议把机器人移动到(J1 轴 0°, J2 轴 0°,J3 轴 0°,J4 轴 0°,J5 轴-90°,J6 轴 0°)的位置。 (2)按下 MENUSYSTEMMotion,出现如下画面:
邮编: 201906 传真: 021 — 5032 7711
上海发那科机器人有限公司
在已经知道要推定的负载重量的情况下, 将光标移动到第 2 行, 选择 “YES”, 并指定重量值。 (5).按下 NEXT(下一页) ,并按下 F4 DETAIL,出现推定位置 1 画面:
推定位置 1 建议使用如上图所示的位置即可,如果由于实际需要,需要改变 推定位置 1,可使用 TP 上的数字键直接输入。如果想使用推定位置 2,按下 F2 POS.2,进入推定位置 2 设定画面,其设定方法与推定位置 1 一样。 (6)按下[SHIFT]+[F4](MOVE_TO),机器人移动到推定位置 1.(请在确认设定位 置时使用该步骤) 。 (7)按下 PREV 键,返回负载推定画面。将 TP 置成 OFF,控制柜模式选择开关置 成 AUTO 模式,按下 F4 EXEC 键执行负载推定程序(在执行程序时应注意使机器 人避免碰撞,保护好机器人) (8)负载推定程序执行完成后,将 TP 置成 ON。按下 F5 APPLY 键,将所推定的 值设定在负载条件编号中,完成负载推定。 (9)FANUC 伺服焊枪的负载推定结果大致如下图所示:
8、KUKA伺服焊枪配置

伺服焊枪零点校正
二、伺服焊枪零点校正 1、在电极帽为全新的前提下,缓慢移动电极臂,使两电极帽轻轻碰到;
2、在示教器中点击主菜单,投入运行→调整→千分表,校正零点完成。
三、伺服焊枪压力标定 1、点击主菜单,配置→伺服枪扭矩 控制→配置,如右图;
2、控制器类型根据实际选择,如右 图中为“BOSCH”;焊枪类型选为 “C”或“X”;工具坐标补偿方向 为+Z;是否启动补偿功能选择为On; 是否启动电极帽检测功能选择为On; 压力标定方式选择为“5P”;压力 计厚度根据实际设置;初始压力设 为“1”;最大修磨量根据实际设置; 持续运动距离设置为3mm;
注:如果使用的是KUKA标准马达,伺服马 达文件和伺服驱动文件可在以下路径找到: C:\KRC\ROBOTER\Config\System\Common\ Motor C:\KRC\ROBOTER\Config\System\Common\ Servofile
27、启动类型选择为“冷启动”,选择 “重新读入文件”,重启机器人控制器;
8、机器人与焊枪文件都加载完成后,关闭选项框。
5
配置伺服焊枪
9、右键单击控制器,选择“Add”进行样本添加;
10、根据实际情况,选择对应的机器人型号、焊枪型号,分别点击 添加;
6
配置伺服焊枪
11、点击Editors → Configure kinematic relations,中间编辑区域 出现机器人与焊枪图标; 12、点击左侧项目结构窗口中的Geometry项,拖拽焊枪图标到机器人的 “Flange Base”上;
15
配置伺服焊枪
22、点击Editors → Option packages → ServoGun TC Editor,中间 编辑区域出现焊接控制器设置,如下图;
(完整word版)FANUC焊接机器人控制系统介绍、应用故障分析及处理
FANUC焊接机器人控制系统介绍、应用故障分析及处理FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间中,其控制系统采用32位CPU 控制,采用64位数字伺服驱动单元,同步控制6轴运动;支持离线编程技术;控制器内部结构相对集成化,这种集成方式具有结构简单、整机价格便宜且易维护保养等特点。
焊接是工业生产中非常重要的加工方式,同时由于焊接烟尘、弧光和金属飞溅的存在,焊接的工作环境非常恶劣,随着人工成本的逐步提升,以及人们对焊接质量的精益求精,焊接机器人得到了越来越广泛的应用。
机器人在焊装生产线中运用的特点焊接机器人在高质、高效的焊接生产中发挥了极其重要的作用,其主要特点如下:1.性能稳定、焊接质量稳定,保证其均一性焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定性作用。
人工焊接时,焊接速度、干伸长等都是变化的,很难做到质量的均一性;采用机器人焊接,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,焊接质量非常稳定。
2.改善了工人的劳动条件采用机器人焊接后,工人只需要装卸工件,远离了焊接弧光、烟雾和飞溅等;点焊时,工人不再需要搬运笨重的手工焊钳,从大强度的体力劳动中解脱出来。
3.提高劳动生产率机器人可一天24h连续生产,随着高速、高效焊接技术的应用,使用机器人焊接,效率提高地更加明显。
4.产品周期明确,容易控制产品产量机器人的生产节拍是固定的,因此安排生产计划非常明确。
5.可缩短产品改型换代的周期,降低相应的设备投资可实现小批量产品的焊接自动化。
机器人与专机的最大区别就是它可以通过修改程序以适应不同工件的生产。
FANUC机器人控制系统1.概述FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间中,是奇瑞公司最早引进的焊接机器人,也是最先用到具有附加轴的焊接机器人。
其控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换的运算速度;采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高,最多可控制21轴,进一步改善了机器人动态特性;支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序;控制器内部结构相对集成化,这种集成方式具有结构简单、整机价格便宜且易维护保养等特点。
发那科伺服驱动器端子功能说明
发那科伺服驱动器端子功能说明发那科是一家专业从事工业自动化设备研发和制造的公司,其产品涵盖了机器人、伺服驱动器、PLC等多个领域。
在伺服驱动器方面,发那科的产品具有高性能、高精度和高可靠性等特点,广泛应用于各种工业自动化领域。
本文将详细介绍发那科伺服驱动器端子的功能说明,包括输入端子和输出端子的功能及使用方法。
通过对这些功能的了解,用户可以更好地使用发那科伺服驱动器,并实现各种应用需求。
一、输入端子功能说明1. 电源接口电源接口用于连接外部电源,提供电力供应给伺服驱动器。
根据实际需求选择适当的电源接口,并按照规定的电压和频率进行连接。
2. 控制信号输入控制信号输入端子用于接收来自上位机或其他控制设备的信号,以控制伺服驱动器的运行状态。
常见的控制信号包括启停信号、方向信号、位置指令信号等。
3. 编码器反馈信号编码器反馈信号是由连接在伺服电机轴上的编码器产生的,用于提供电机位置和速度等信息。
伺服驱动器通过对编码器反馈信号的读取和处理,实现对电机运动的闭环控制。
4. 报警输入报警输入端子用于接收来自外部设备或传感器的报警信号。
当发生故障或异常情况时,伺服驱动器会接收到报警信号并做出相应的处理,以保证系统的安全运行。
5. 温度检测温度检测端子用于连接温度传感器,用于监测伺服驱动器内部的温度。
当温度超过设定值时,伺服驱动器会采取相应的措施进行散热或报警。
6. 限位信号输入限位信号输入端子用于接收来自限位开关或其他位置传感器的信号。
通过对限位信号的检测,伺服驱动器可以判断电机是否达到了设定的位置范围,并作出相应的控制。
二、输出端子功能说明1. 电机控制输出电机控制输出端子用于连接伺服电机,通过输出合适的电流和电压控制电机转速和方向。
根据实际需求选择适当类型和规格的输出端子,并按照正确的接线方式进行连接。
2. 报警输出报警输出端子用于向外部设备或系统发送报警信号,以提示异常情况或故障发生。
通过与其他设备的连接,可以实现对整个系统的报警和故障处理。
fanuc机器人伺服枪简单配置
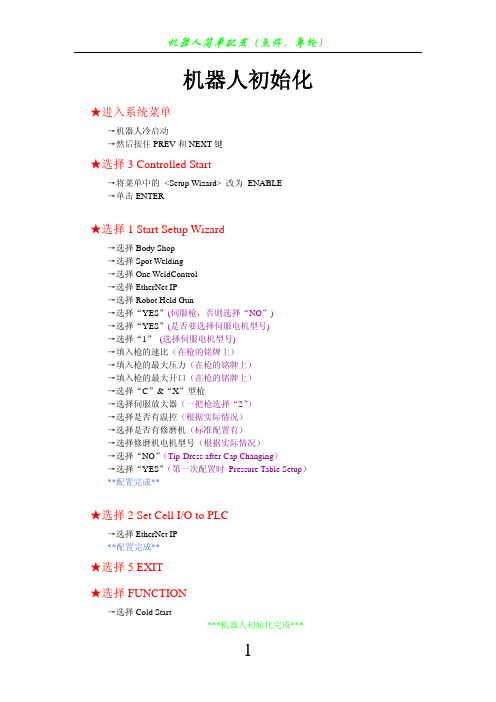
机器人初始化★进入系统菜单→机器人冷启动→然后按住PREV和NEXT键★选择3 Controlled Start→将菜单中的 <Setup Wizard> 改为 ENABLE→单击ENTER★选择1 Start Setup Wizard→选择Body Shop→选择Spot Welding→选择One WeldControl→选择EtherNet IP→选择Robot Held Gun→选择“YES”(伺服枪,否则选择“NO”)→选择“YES”(是否要选择伺服电机型号)→选择“1”(选择伺服电机型号)→填入枪的速比(在枪的铭牌上)→填入枪的最大压力(在枪的铭牌上)→填入枪的最大开口(在枪的铭牌上)→选择“C”&“X”型枪→选择伺服放大器(一把枪选择“2”)→选择是否有温控(根据实际情况)→选择是否有修磨机(标准配置有)→选择修磨机电机型号(根据实际情况)→选择“NO”(Tip-Dress after Cap Changing)→选择“YES”(第一次配置时 Pressure Table Setup)**配置完成**★选择2 Set Cell I/O to PLC→选择EtherNet IP**配置完成**★选择5 EXIT★选择FUNCTION→选择Cold Start***机器人初始化完成***焊枪初始化★ 零位设置→MENUS→0→SYSTEM→GUN MASTER→BZAL(清故障)→FUNCTION→0→POWER CYCLE(将编码器复位,否则机器人无法运动)→把焊枪上下电极杆开到相碰按下(该点即为焊枪零位)→SHIFT+EXEC(记入)**设置完成**★ 初始化设置→MENUS→UTILITES→GUNSETUP→依次按ENTER键进行一下设定[SET GUN MOTION SIGN] (设定枪的方向)→关枪→按[F5]CLOSE→按[F3]COMP[SET GUN SPACE,MASTER,GUN] (设定枪的基本参数)→在“******”处填入相应参数(在枪的铭牌上找)→关枪至零位→按[F3]COMP[AUTO TUNE] (自动计算一些参数)→按SHIFT+[F3] EXEC (运行过程中SHIFT必须一直按住)[THICKNESS CHECK CABIBRATION](◆在压力标定完成后再做◆)→按SHIFT+[F3] EXEC (运行过程中SHIFT必须一直按住)**设置完成**★ 焊枪压力标定→MENUS →Setup→Servo Gun→选择<*DETAIL*> (第二行)→PRESSURE CAL(ENTER)→YES[Pressuring Time (sec)] = 2.0 加压时间2"[Thickness of Gauge (mm)]压力计厚度请如实填写[Pushing Depth (mm)]压入深度,填20mm[Gun Open Value (mm)]标定时枪口每次张开的大小→尝试输入适当的扭矩值,从低扭矩开始(5%);直到到达匹配的压力→SHIFT-[F3: Pressure]→填入压力值→所有扭矩测量完毕后点击-[F3: comp] (把光标移到CALIBRATION STATAS)→执行程序菜单选择TW-SETG1宏程序(看TIP WEAR STANDRD变成COMP)**设置完成*****焊枪初始化完成***机器人通讯设置★ 机器人I/P地址设置→MENUS→SETUP→[FI] TYPE→下页→下页→HOST COMM→DETAIL ★ 焊机I/P地址设置→MENUS→I/O→[FI] TYPE→下页→ETHERNET I/P→选择WELD CONTROL→CONFIG(必须在FALSE状态下,否则把TURE改成FALSE)填入以下内容Vendor ID:270Device TYPE:12Produce code:1Inputsize:1Outputsixe:1RPI:32Assembly instance(input):100Assembly instance(input):150★ DEVICENET通讯设置→MENUS→I/O→[FI] TYPE→下页→DEVICENET→选择(82)F4(DETAIL)选择波特率500再ONLINE→[F3] DIAG→[F3] BROWSE(必须在ONLINE状态下,光标移到63上,波特率为500)→机器人自动查找→QUERY→POLL→ENTER→ADD-SCAN→ADD-DEF→重启(机器人配WATERSA VER)★ 同种方式配置其他模块***机器人通讯设置完成***机器人HOME点设定★ 将机器人示教到相应位置★ 在寄存器中记入位置值→MENUS→SETUP→下页→REF POSITION→DETAIL→SHIFT+RECORD★ 在位置寄存器中记入位置值→MENUS→下页→DATE→下页→POSITION REG→选择PR[1] →SHIFT+RECORD(HONE点尽量做到机器人姿态自然,便于打点,不与任何物体干涉,各轴转动范围在±180以内。
FANUC伺服焊枪操作手册
6.负载设定
1.负载设定的必要性: 由于伺服焊枪具有一定的重量(约为 5kg) ,我们需要进行负载设定。以提 高机器人如下性能: (1).提高动作性能(振动减少,循环时间改善) 。 (2) .更加有效的发挥与动力学相关的功能 (提高冲撞检测功能和重力补偿功能) 2.负载设定的步骤 (1)将机器人移动至合适位置.一般情况下,建议把机器人移动到(J1 轴 0°, J2 轴 0°,J3 轴 0°,J4 轴 0°,J5 轴-90°,J6 轴 0°)的位置。 (2)按下 MENUSYSTEMMotion,出现如下画面:
(3)移动光标至需要设定的负载条件编号,按下 F2 DETAIL 进去,出现如下画 面:
移动光标到第二项 PAYLOAD 处,使用 TP 上得数字键输入伺服枪的重量,再 按下 PREV 键,返回上一画面。 (4)按下 NEXT,并按下[F2](IDENT) ,出现负载推定画面:
地址:上海市宝山区富联 1500 号 电话: 021 — 5032 7700
地址:上海市宝山区富联 1500 号 电话: 021 — 5032 7700
邮编: 201906 传真: 021 — 5032 7711
上海发那科机器人有限公司
移动光标至 TYPE 处,按下 CHOISE 选择信号类型,再移动光标到中括号处, 使用 TP 上得数字键直接输入信号编号。
设定伺服焊炬功能的 。设定完需重启机器人。 设定要使用的伺服焊炬轴的轴编号,设 定完需重启机器人。 设定手动金属线寸动为通常/恒量寸动 设定恒定量寸动时的金属线进送量。 设定控制保护气通断的信号。该信号一 般采用 EE 接头的输出信号 设定气洗功能 ENABLE/DISABLE 设定控制气洗功能的信号。该信号一般 采用 EE 接头的输出信号 设定在气洗功能下,伺服焊炬的电机停 止后,到气洗结束之前的时间。
伺服机器人焊钳080418(中文)教材
伺服焊钳与机器人的关系
1 轴伺服焊钳 使用机器人的所有6根轴使其做自平衡运动
7 轴机器人软件自平衡系统
电源
7
LARGE TYPE 大型
2
X TYPE SERVO GUN
SMALL TYPE 小型
MEDIUM TYPE 中型
LARGE TYPE 大型
3
各种特殊伺服焊钳 SPECIAL SPEC SERVO GUN
4
各种形状焊钳的驱动部一览 C GUN
丰田型驱动部
特征
用于丰田自动车系列 中部使用了托架
齿轮箱是用铸件做的 可以使用的加压力
活塞杆左右运动
安装到焊钳本体上时,通过将其固定到GUN BODY和动轭上,起到止旋作用
向心止推滚珠轴承
减速机型驱动部简介
电极臂
通过电极臂在旋转 方向上的运动实现 加压和开放
驱动侧 皮带轮
皮带
电极臂
减速机本体
输入齿轮
减速机的优点
减速机的缺点
因减速比很大,所以可以用很小 的力得到很大的加压力
因减速比很大,所以加压速度及 其慢。
3923N以下
驱动部行程 60,160,210,310,
410 设计寿命 1000万点 保证寿命 500万点
B型驱动部 特征A-TFra bibliotekPE的低减成本型 齿轮箱为型材
可以使用的加压力
4413N以下 可能使用的行程 60,130,160、210
设计寿命 600万点 保证寿命 300万点
A型驱动部 特征
高加压型驱动部 特征
小原的标准驱动部 齿轮箱为型材
可以使用的加压力 4413N以下
A型驱动部的高加压型 齿轮箱为型材
KUKA机器人培训4-伺服焊枪配置培训
9
伺服焊枪配置
机器人示教器选择:
配置-外部轴 电机/轴传动比项会 自动生成新数值。
10
伺服焊枪配置
将生成数据填入电机/轴传动比 查看电机标牌,填入电机额定转速 填写正负软限位
11
伺服焊枪配置
参照参数文件,填入其它选项。KUKA需提供电机和伺服文件。
12
伺服焊枪配置
在motor中加载电机文件
13
Workvisual 培训-伺服焊枪配置
烟台奥德克汽车技术设备有限公司
2015.01
1
伺服焊枪配置
加载样本
2
伺服焊枪配置
添加 ServoGunTC.afc
3
伺服焊枪配置
在设备目录中加载机 器人和伺服焊枪
4
伺服焊枪配置
选择 EditorsConfigure kinematic relations 配置主从关系
18
伺服焊枪配置
19
伺服焊枪配置
15mm,视实际情况 而定 -z
20
伺服焊枪配置
21
伺服焊枪配置
22
伺服焊枪配置
23
伺服焊枪配置
24
伺服焊枪配置
25
伺服焊枪配置
26
伺服焊枪配置
27
伺服焊枪配置
28
5
伺服焊枪配置
选择Editors 配置机械参数
6
伺服焊枪配置
选择Editors 配置机械参 数
7
伺服焊枪配置
机器人示教器选择: 配置伺服焊枪扭矩配置焊枪参数 按照焊枪参数表填 入传动比等各项数 据。 合枪为0点,行程 20到-max,打开为 负向。
8
伺服焊枪配置
机器人示教器选择: 配置伺服焊枪扭矩配置焊枪参数 按照焊枪参数表填 入传动比等各项数 据。 合枪为0点,行程 -20到max,打开为 正向。
FANUC 机器人系列伺服枪操作手册
7.3.2 调整结果输出的方法.........................................................................................55 7.3.3 完成出现报警 SVGN-050 时的自动调整程序 ...................................................55 7.3.4 调整失败.............................................................................................................55
FANUC机器人 SERVO GUN点焊 培训教材
目录第一章概述 (1)1.1FANUC机器人伺服枪功能的特点 (1)1.2基本规格 (1)1.3 伺服焊枪的组成部分 (1)1.4控制方法 (2)第二章伺服枪的初始化设置 (3)2.1 伺服枪轴初始化安装 (3)2.2 设置坐标系 (8)2.2.1 焊枪安装在机器人上的情形 (8)2.2.2 焊枪固定在地面或工作台上的情形 (8)2.3 伺服枪设置 (9)2.3.1 焊枪零位设置(Gun Master) (9)2.3.2 焊枪关闭方向设置 (10)2.3.3 焊枪轴限位设置 (11)2.3.4 焊枪自动调节 (13)2.3.5 压力标定 (15)2.3.6 工件厚度标定 (16)第三章焊接设置 (18)3.1 点焊I/O (18)3.1.1 点焊系统基本术语 (18)3.1.2 点焊I/O及其设定 (19)3.2 伺服枪设定 (24)3.2.1 伺服枪设定画面 (24)3.2.2 伺服枪一般设定画面 (24)3.2.3 焊枪行程极限的更改 (26)第四章手动操作 (28)4.1 手动加压 (28)4.2 手动行程 (30)4.3 手动焊接 (32)4.4焊枪点动操作 (33)第五章编程 (35)5.1 点焊指令 (35)5.1.1 点焊指令格式 (35)5.1.2 焊接顺序 (41)5.1.3 示教位置 (42)5.2 其他指令 (42)5.2.1 加压动作指令 (42)5.2.2 压力指令 (43)5.2.3 焊枪零位调校指令 (44)第六章焊嘴磨损补偿 (45)6.1 概述 (45)6.2 2步方式 (45)6.2.1 准备工作 (45)6.2.2 测量方法 (46)6.3 单步方式 (48)6.4 焊嘴磨损补偿功能的设定 (50)6.4.1 焊嘴磨损检测设定 (50)6.4.2 焊嘴磨损基准值设定 (52)6.5 恢复步骤 (53)6.5.1 恢复焊枪零位数据 (53)6.5.2 焊嘴破损时的恢复 (54)6.6 焊枪行程极限补偿 (55)附录 SVGN报警代码 (57)第一章概述1.1 FANUC机器人伺服枪功能的特点全面支持伺服枪专用功能(手动操作、点焊自动路径生成、焊极磨损补偿等);可以自动生成最适合于点焊的最佳路径;与气焊枪的操作类似,便于掌握。
7.KUKA电伺服焊枪配置详解

7.KUKA电伺服焊枪配置详解01KUKA ServoGun For Nimak硬件连接电伺服枪整体布局概览01 VKRC4 ED15 7轴(机器人+随行焊枪)02 VKRC4 ED15 7轴(机器人 + 固定焊枪)03 VKRC4 ED15 8轴(机器人 + 2*固定焊枪)04 VKR C4 ED15 8 轴(机器人 + 固定焊枪+ 随行焊枪)05 VKR C4 ED15 8轴(机器人 + KUKA 线性滑轨 + 随行焊枪)06 VKR C4 ED15 8轴(机器人 + KUKA 线性滑轨 + 固定焊枪)07 VKR C4 ED15 9轴(机器人 + KUKA 线性滑轨 + 固定焊枪+ 随行焊枪)08 VKR C4 ED15 9轴(机器人 + KUKA线性滑轨+ 2*固定焊枪)02KUKA Servogun For Nimak软件配置Workvisual电伺服焊枪配置右击“controller component” 选择“drive configuration”进入驱动配置界面,如图只有一个附加轴驱动输出接口(根据KPP的型号可以同时驱动多个附加轴)焊枪电机与驱动输出端口如何配置,视实际使用情况而定:如图左1两个电机公用一个驱动端口,两个电机必须允许耦合如图右1两个电机各用一个驱动端口,可以自由分配是否需要耦合(右击可以选择组合或分组、允许耦合或不允许耦合)选中左侧“controller component” 下面需要设置的焊枪,然后点击菜单快捷键的“ServoGun Editor”按钮进入相应伺服焊枪的设置界面Workvisual电伺服焊枪配置介绍:机器人初始化配置:1.导入user、makro2.导入NIMAK焊枪的.xml文件NIMAK每把电伺服焊枪都会配备一个存有该焊枪的xml文件,该文件中包含电机的各项参数(包括压力标定),我们直接导入即可·可以将机器人中已经配置好的焊枪数据导出·也可以将外部的焊枪配置文件加载到机器人中3.进行焊枪零点标定·标定零点可以手动也可自动·手动标定:更换新电极帽,目检电极帽合拢到稍微接触的状态,标定为零点即可·自动标定:枪口不易开口太大(合拢速度慢),按住使能按钮,点击自动零点标定,枪口会缓慢自动合拢,自动标定零点4.确定焊枪传动比手动将附加轴的电机旋转到360度,然后把E1的实际位置填入传动比对话框,保存数据即可·验证传动比:将焊枪开口开置大口,比如100,然后用卡尺测量实际开口是否为100左右,只要偏差不大即可5.伺服焊枪软件限位设置并验证·按照焊枪说明文件提供的开口进行软件限位设置;·设置负向软件限位开关:手动将焊枪开口打开到接近开口最大位置(打开时注意硬件有无干涉),然后应用实际位置到最大开口宽度中即可(当前版本是负值)·设置正向软件限位开关:按照焊枪说明文件设置焊枪的正向软件限位(同焊枪的最大挠度一致,或比最大挠度略小一点)·设置完后需要进行测试焊枪到达软件限位会不会停止6. 测力计厚度测量7.压力标定8.焊枪推移效应设置·根据焊枪实际情况来判断是否激活推移效应的补偿·如果是X型且电极杆是倾斜的焊枪,需要激活推移效应补偿,补偿方向是枪口向内的方向(Z方向),补偿值是夹紧力最大时的焊枪TCP推移的距离,该距离可以直接按照焊枪说明书填写,也可自行测量(只有在焊枪推移距离很大时,开启补偿才有意义)9.焊枪非对称挠度数据设置·根据焊枪实际情况来判断是否激活非对称挠度的补偿·如果是X型且电极杆是倾斜的焊枪,需要激活推移效应补偿,补偿方向是枪口向内的方向(Z方向),补偿值是夹紧力最大时的焊枪TCP推移的距离,该距离可以直接按照焊枪说明书填写,也可自行测量10.电机控制参数测试·该电机参数测试是否需要执行有待确认(暂时不要执行)·该界面的数值都是从焊枪的xml文件导入的·该测试类似气伺服的EMZ测试(空载无压力测试)·枪口成打开状态,点击电机参数按钮·机器人会自动进入一段编好的程序,正常T2模式下100%执行即可11.焊机通讯程序设置并测试:·博士控制器添加91号程序(截图为97号,现场使用是91号),主要设置内容是压力和电流。
发那科伺服驱动器端子功能说明
发那科伺服驱动器端子功能说明一、介绍在机械自动化领域,伺服驱动器是一种常见的组件,它通过控制伺服电机的旋转来驱动机器的运动。
发那科是一家知名的伺服驱动器制造商,其产品在精密控制和高效运动方面具有卓越的性能。
本文将详细探讨发那科伺服驱动器的端子功能,包括其主要特点和用途。
我们将从硬件接口、信号输入输出、保护功能和扩展接口等方面进行阐述,以帮助读者更好地了解和使用发那科伺服驱动器。
二、硬件接口2.1 电源接口发那科伺服驱动器通常需要外部供电,常见的电源接口有AC电源和DC电源两种。
AC电源通常为单相或三相交流电,而DC电源则为直流电。
用户需要根据实际需求选择合适的电源接口,并按照要求正确连接。
2.2 信号输入输出接口发那科伺服驱动器提供多种信号输入输出接口,用于与其他设备进行通信和控制。
常见的信号接口有脉冲输入、模拟输入、数字输入和数字输出等。
用户可以根据实际需要选择相应的接口,并按照要求正确连接。
三、信号输入输出3.1 脉冲输入发那科伺服驱动器通常支持脉冲输入控制方式,用户可以通过频率和脉冲数量来控制电机的速度和位置。
脉冲输入通常需要连接脉冲发生器或运动控制器等设备,通过发送特定的信号来实现运动控制。
3.2 模拟输入除了脉冲输入,发那科伺服驱动器还支持模拟输入控制方式。
用户可以通过设置模拟输入的电压或电流来控制电机的速度和位置。
模拟输入通常需要连接模拟信号发生器或PLC等设备,以实现精确的运动控制。
3.3 数字输入和数字输出发那科伺服驱动器还提供数字输入和数字输出接口,用于与其他数字设备进行通信。
数字输入通常用于接收来自其他设备的触发信号,而数字输出则用于控制其他设备的操作。
用户可以根据实际需求将伺服驱动器与其他设备进行灵活的连接和控制。
四、保护功能发那科伺服驱动器具有多种保护功能,以确保设备的安全运行和损坏的避免。
以下是一些常见的保护功能: 1. 过流保护:当电机电流超过设定值时,伺服驱动器会立即停机,以避免电机受损或其他设备受到损害。
KUKA机器人培训4-伺服焊枪配置培训
.
12
伺服焊枪配置
在motor中加载电机文件
.
13
伺服焊枪配置
在Servofile中加载伺服文件
.
14
伺服焊枪配置
选择 ServoGun TC Editor
.
15
伺服焊枪配置
选择 Program number和 Robot compensation。 完成后保存,编译并下载。
.
16
伺服焊枪配置
Workvisual 培训-伺服焊枪配置
烟台奥德克汽车技术设备有限公司 2015.01
.
1
加载样本
伺服焊枪配置
.
2
伺服焊枪配置
添加 ServoGunTC.afc
.
3
伺服焊枪配置
在设备目录中加载机 器人和伺服焊枪
.
4
伺服焊枪配置
选择 EditorsConfigure kinematic relations 配置主从关系
按照焊枪参数表填 入传动比等各项数 据。
合枪为0点,行程 -20到max,打开为 正向。
.
9
伺服焊枪配置
机器人示教器选择:
配置-外部轴 电机/轴传动比项会 自动生成新数值。
.
10
伺服焊枪配置
将生成数据填入电机/轴传动比 查看电机标牌,填入电机额定转速 填写正负软限位
.
11
伺服焊枪配置
参照参数文件,填入其它选项。KUKA需提供电机和伺服文件。
.
27
伺服焊枪配置
.
28
此课件下载可自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我联系删除!
.
5
伺服焊枪配置
8、KUKA伺服焊枪配置
5、拿开压力计,焊钳回零点位置,
1
若零点已偏,重新标定压力;若零点
正常,把记录的五个值按顺序填入右
图中的2处,点击计算,保存;
20
伺服焊枪压力标定
6、打开焊枪,压力计垂直放入电极之间,执行程序eg_recall.src,再 次测出五个压力值,记录; 7、拿开压力计,焊钳回零点位置,若零点已偏,重新标定压力;若零 点正常,把记录的五个值按顺序填入右图中的2处,点击计算,保存; 8、打开焊枪,压力计垂直放入电极之间,执行程序eg_force.src,在弹 出的对话框中选择压力大小,按从小到大的顺序进行测试,并与压力计 的测试结果作比较,若偏差较大,重新校正零点,重新进行压力标定; 若偏差较小,执行完程序后压力标定结束。
19
伺服焊枪压力标定
3、点击主菜单,配置→伺服枪扭矩 控制→校正5P,根据焊枪的最大压力 值,把压力均匀分为5段,按从小到 大的顺序填入右图中的1处;填入焊 枪的最大压力值; 注:输入的最大值要略小于焊枪的最 大压力值,以防焊枪受损;
2 4、打开焊枪,压力计垂直放入电极 之间,执行程序eg_call.src,测出五 个压力值,记录;
7
配置伺服焊枪
13、拖拽之后,焊枪自动连接到机器人的法兰上,如下图;
8
配置伺服焊枪
14、点击Editors → Machine data configuration,出现焊枪参数 配置界面;
9
配置伺服焊枪
15、点击Joint 1,轴识别号(Axis ID)设为7,即分配为机器人的第7轴; 轴可脱开(Axis decouplable)复选框根据实际情形选择,若机器人带 切换盘,需要切换,则选定复选框,否则不选定;
21
伺服焊枪信号设定
FANUC伺服焊枪介绍

限制
• 没有安装焊枪轴电机用电池的类型的焊枪,连结后需要进行位置对合动作其与电池安装类 型的焊枪相比循环时间延长。 • 成为焊枪更换对象的电机,必须通过相同的放大器进行控制。 • 与多任务不对应。(不能通过多个程序来同时进行焊枪更换操作。)
禁止事项
• 在机器人电源被切断时请勿强制拆下焊枪。 • 带有焊枪更换功能的系统,不能使用线路跟踪功能。
ARM 线缆(controller to J1 )
ARM线缆(J3-J6)
07 伺服参数配置 11 伺服焊枪软件设置
配置界面
在伺服焊枪软、硬件准备完成后, 通过FANUC Robot controller 的TP 界面对伺服枪进行添加及相关设置, 完成伺服枪的添加。
伺服焊枪电机参数在 控制启动模式下配置
2、稳定 从焊接工艺来说,伺服焊枪对焊接加压过程、压 力值控制精准稳定,从而相对气动焊枪可以实现更 好的焊点外观和质量。
优点三:
3、行程柔性 由于使用伺服控制,焊枪开口可以根据工件情况 任意设定所需要的开口大小,相比较气动焊枪的单、 双行程,极大的提高了行程的柔性。
伺服焊枪结构分解
焊枪臂(部分) FANUC 伺服电机
所有参数项设置完成 后,选择4.exit退出配 置界面。
伺服轴添加
在退出参数配置界面后,需要确认伺服焊枪是否添加完成,按照 如下图所示的MENU-- NEXT– SETUP SERVO GUN,看到Equip Type 为 SERVO GUN,伺服枪就已经添加好了。
伺服脉冲报警
在伺服轴添加完成后,会出现SRVO-063、 SRVO-075报警,由于伺 服需要与控制器进行脉冲匹配,所以需要对这两个报警进行消除。 消除报警分为两个步骤: STEP1:消除SRVO-063报警 进入MENU—NEXT—SYSTEM—F1—Gun Master界面,按F3(BZAL)脉 冲编码复位。复位完成后重启机器,SRVO-068报警即可解除。
KUKA机器人KRC4伺服焊枪配置
第二部分:部分功能开启
1、换枪耦合功能开启
在ServoGun_TC 文件夹下 eg_extern.dat 程序中Gun changing 下更改为global int eg_couple_axis= “B0011” ,global int eg_extax_active=1, global int eg_gun_nbr=2, 重启,机器人程序中 SEVER GUN COUPLE (换枪耦合功能)就可以 使用了。
30
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.5、焊枪校正零点
注意枪正反方向, 如方向不同,可在 机器人示教器中枪 参数栏,把传动比 数值取反!!
31
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.5、焊枪校正零点
32
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.6、焊枪压力标定
33
第一部分:配置伺服焊枪
15
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.4、机器参数配置
连接完成。选择编 辑器,机器参数配 置。
16
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.4、机器参数配置
单击joint1,生成各 参数选择项。
17
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.4、设置焊枪参数
机器人 打开 配置伺服枪-枪参数。
不变
INT $ WARMCP_CVRR_LIMIT=95 由95改为90
INT $ WARMCP_MIN_FAC=60
由60改为50
DEAL $ WARMCP_SELW_RATE=5.0 不变
51
52
38
第一部分:配置伺服焊枪
2、配置伺服焊枪 2.6、焊枪压力标定
ER210-C40伺服焊枪调试规范
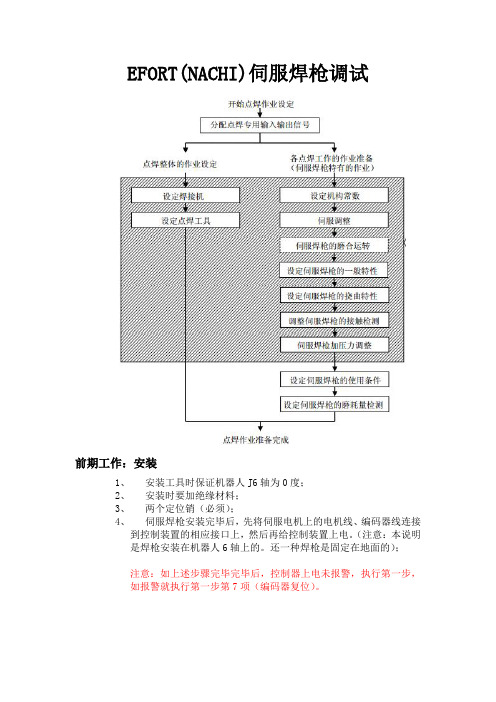
EFORT(NACHI)伺服焊枪调试前期工作:安装1、安装工具时保证机器人J6轴为0度;2、安装时要加绝缘材料;3、两个定位销(必须);4、伺服焊枪安装完毕后,先将伺服电机上的电机线、编码器线连接到控制装置的相应接口上,然后再给控制装置上电。
(注意:本说明是焊枪安装在机器人6轴上的。
还一种焊枪是固定在地面的);注意:如上述步骤完毕完毕后,控制器上电未报警,执行第一步,如报警就执行第一步第7项(编码器复位)。
一、设定机构常数1、设定应用程序菜单常数:12 格式和初期设定 7 应用程序设定内容作为需要使用的应用程序,请选择点焊。
同时,更改软键的布局,如果需要也要进行 I/O 的初始化等。
2、焊接机设定3、点焊焊枪设定4、设定伺服焊枪基本参数通过直接输入伺服焊枪制造商提交的伺服焊枪规格表,可以便于初始化伺服焊枪的相关机械常数等。
通过本章中的设定,可以进行[1.8.1 设定电机和编码器]、[1.8.2设定伺服参数]和[1.8.3 设定机械手常数]。
(焊枪制造商的伺服焊枪规格表格式可能与正式输入的参数不同。
请单独设定机器常数等。
)5、设定机械常数机械常数必须设定工作伺服电机的特性或决定机械结构的众多参数。
准备需使用的伺服电机的规格表、伺服焊枪制造商提供的机械规格表,慎重输入所有的参数。
在设定伺服焊枪基本参数时已输入参数的情形,无需进行本章中的设定。
请确认参数的内容。
6、试启动运转准备试启动运转准备可能报警如伺服焊枪编码器电压过低等,执行下一步。
7、编码器复位(1)安装新的伺服焊枪或更换伺服焊枪的电机时,编码器没有通过外部电池进行备份,先前的数据会丢失,此时编码器输出错误,无法进行运转准备。
因此,首先需要复位编码器,然后清除错误并复位转数计数器。
(注意:请确认伺服焊枪轴的“编码器类型”的数字为 4 以外。
在本控制装置中,不能使用硬件重置类型的编码器。
具体查看方法请查看《TFDCN-044-001_ExpertServoGun》)(2)执行编码器复位,注意编码器复位完毕后控制器要出重新上电启动。
FANUC弧焊TORCHMATE功能步骤

TORCHMATE功能Torch Mate是一种本钱低、方便实用的自动调整TCP的一种解决方案。
使用Torch Mate能够自动补偿由于焊枪颈弯曲或导电嘴磨损导致的TCP不准。
Torch Mate的操作原理类似touch sensing,在焊丝上应用一个电压,当焊丝接触Torch Mate对枪块时,产生一个输入信号。
Torch Mate只补偿x, y, z方向的变化,而不会对角度的变化w, p, r进展补偿。
TorchMate3使你能够选择一个自动错误恢复方式用在生产中发生Torch Mate错误时——REDO, SKIP, ABORT, 或者 PROMPT。
TorchMate3包含两种监控功能,Collision Monitor 和 Touchup Monitor,通过设置使用户知道什么时候应该执行Torch Mate调整功能。
当您使用Torch Mate功能时,首先确保系统具有这个功能,并且已经有了正确定义的TCP。
为方便操作和使用,建议使用Torch Mate对枪块进展TCP的设置。
然后设置Torch Mate和TCP的master。
完成了master之后,任何时间都可以使用Torch Mate来检查和调整TCP。
因为Torch Mate为每个机器人组合〔最多两个机器人〕提供一个可执行的程序,无论何时需要,都可以自动地〔例如每50个生产部件〕或者手动地调用该程序。
使用 Torch Mate对于任何一个机器人来说,使用Torch Mate 都包含以下几个步骤:1.安装TorchMate 硬件和软件2.设置TorchMate参数表3.在一个程序中参加TorchMate 程序指令〔执行自动TorchMate 操作〕4.运行 TorchMate.5.监控 TorchMate 的执行结果1.要求和导那么为了能顺利使用TorchMate功能,请认真阅读下面的要求和导向:•如果使用的是粘丝检测线路,无需再增加touch sensing硬件或软件,对任何焊接设备都可以直接使用TorchMate功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
换枪功能介绍
使用无电池类型焊枪的情况下,受到如下限制。
• 在位置对合动作类型1、2的情况下,不能通过保持或急停来中断位置对合动作。 • 在位置对合动作类型1、2的情况下,不能进行磁极检测。 • 在位置对合动作类型3、4的情况下,需要扩展行程极限,以使焊枪轴接触到开启端。 • 在位置对合动作类型5、6的情况下,需要在焊枪上设置诸如极限开关之类的开关。 • 在位置对合动作类型7、8的情况下,焊枪分离期间,焊嘴的磨损量发生变 化时,不能都正确进行连结时的位置对合。焊嘴的更换,应在连结焊枪的状态下进行。
控制启动模式(ctrl start)
配置界面
进入控制启动模式后,进入下图的界面对伺服电 机进行参数配置(光标移动到“2 servo gun axes”, 按F4—MANUAL进行手动配置伺服参数)。
伺服轴添加
CONTROL START界面内的伺服电机参数设定主要包括以下几项: 1、电机型号、额定电流大小(放大器上)。比如:αi s8(型号) 4000(转速) 40A(电流)。 2、放大器编号(按照伺服放大器的物理连接顺序,制定伺服焊枪用 马达使用的放大器编号)。 3、 焊枪的机械减速比(每把焊枪的说明书上一般都标有此数据)。 4、 开关枪的行程(参照焊枪说明书设置)。 5、焊枪最大压力(参照焊枪说明书设置)。 6、抱闸编号(具体根据硬件配置,以及所连接的抱闸口)
ARM 线缆(controller to J1 )
ARM线缆(J3-J6)
07 伺服参数配置 11 伺服焊枪软件设置
配置界面
在伺服焊枪软、硬件准备完成后, 通过FANUC Robot controller 的TP 界面对伺服枪进行添加及相关设置, 完成伺服枪的添加。
伺服焊枪电机参数在 控制启动模式下配置
发那科伺服枪功能介绍
2012.09.20
上海发那科机器人有限公司
1
伺服焊枪功能原理介绍
2 3
伺服焊枪主要部件介绍 伺服焊枪软硬件配置介绍
伺服枪介绍
优点一:
功能原理
1、高速 焊接一个工件,用气动焊钳单个焊点(包括焊接 轨迹)占用时间在3s左右,同样的工件使用伺服焊 枪,单个焊点占用时间约为2s。
优点二:
伺服枪零位标定完成后,进入MENU-UTLITIESF1(TYPE)-Gun Setup,执行Auto Tune。
伺服枪软件设置
Auto Tune执行完成后,进入MENU-SETUP-Servo Gun进 入General Setup
伺服枪软件设置
进入第七项-Pressure Cal(压力标定),压力标定完 成后,控制器即完成了伺服电流和焊枪机械压力之间 的对应关系。
厚度检测功能
设定步骤:
厚度检测功能
厚度检测宏
厚度检测宏程序:
厚度检测程序
Servo换枪功能演示视频
换枪功能介绍
功能概要
使用该功能,不用切断机器人控制装置的电源就可进行伺服枪的切换。可以更换的伺服枪 的总数 10 把(系统总体)、6 把(1 台装置)。但是,各装置可同时控制的焊枪数为1 把。 注释:若是焊枪更换系统,建议用户在伺服枪上安装电池。
手动操作如需使用该条件, 需要把Manual设为TRUE
SERVOGUN \ DATA PRESSURE / EQ:1 Gun:1 1/99 No. P(lbf) Thick(mm) Manual Comment 1 150.0 10.0 TRUE [gage check] 2 0.0 0.0 FALSE [ ] 3 0.0 0.0 FALSE [ ] 4 0.0 0.0 FALSE [ ] 5 0.0 0.0 FALSE [ ] 6 0.0 0.0 FALSE [ ] 7 0.0 0.0 FALSE [ ] 8 0.0 0.0 FALSE [ ] 9 0.0 0.0 FALSE [ ] 10 0.0 0.0 FALSE [ ] [ TYPE ] EQUIP GUN DETAI
伺服枪软件设置
压力标定完成后即可进入下图界面对未完成的 Thickness Check calibration项进行标定,即完成了 整个伺服枪的添加和配置。
18
点焊指令介绍
19
伺服点焊功能应用
焊接指令、条件
SPOT COMMAND
手动加压功能
������
在手动操作设定画面上进行加压时间、加压时的开 始和结束焊嘴距离条件的设定������ 按下示教操作盘上的GUN1 键。 ������ 画面右上方显示手动加压中所使用的加压条件。 ������ 每次按下GUN1 键,显示所指定的加压条件。事先 指定加压条件。(见设 定详细[2]) ������ 按下GUN1 键以外的按键,或者在一段时间内不进 行按键操作,显示就会 自动消失。 SETUP \ Servogun\ MANUAL / EQ:1 Gun:1 1/5 Manual Pressure 1 Pressuring Time(sec): 1.0 2 Start distance type: INITIAL DIST 3 End distance type: INITIAL DIST Manual Backup 4 Backup Speed(%): 100 5 Backup stroke: <*DETAIL*> [ TYPE ] EQUIP GUN
焊枪连结指令
通过执行该指令,可不用切断电源地连结焊枪,对无电池类型的伺服枪,自动进行位置对合。 指令格式: GUN ATTACH[i](焊枪连结) i: 焊枪编号(1~6)指定即将连结的焊枪编号。 可根据寄存器及程序的自变量进行间接指定。例: GUN ATTACH[5] GUN ATTACH[R[3]] GUN ATTACH[AR[1]] 连结后,所选的刀具坐标系编号切换为伺服枪一般设定画面指定为“CloseDirection(Robot)” (固定侧焊嘴的焊枪关闭方向)的坐标系编号。
换枪功能介绍
换枪功能设置
换枪功能设置
换枪功能设置
位置对合动作类型设定 (共同设定中设定为“Battery=OFF”的情 况下选择如 下类型。) Calibration Motion Type (位置对合动作类型) 没有安装电池的焊枪,在分离焊枪时位置(脉 冲值)将会丢失。为进行位置的恢复,连结时 焊枪自动执行位置对合动作。 该位置对合由 “为进行脉冲编码器的定位的电机转动2 周的动作(下面称该动作为“位置对合动 作”)”和“在预先设定的参照点的位置对合” 组成。 建议使用类型7或者8。
所有参数项设置完成 后,选择4.exit退出配 置界面。
伺服轴添加
在退出参数配置界面后,需要确认伺服焊枪是否添加完成,按照 如下图所示的MENU-- NEXT– SETUP SERVO GUN, 看到Equip Type 为 SERVO GUN,伺服枪就已经添加好了。
伺服脉冲报警
在伺服轴添加完成后,会出现SRVO-063、 SRVO-075报警,由于伺 服需要与控制器进行脉冲匹配,所以需要对这两个报警进行消除。 消除报警分为两个步骤: STEP1:消除SRVO-063报警 进入MENU—NEXT—SYSTEM—F1—Gun Master界面,按F3(BZAL)脉 冲编码复位。复位完成后重启机器,SRVO-068报警即可解除。
限制
• 没有安装焊枪轴电机用电池的类型的焊枪,连结后需要进行位置对合动作其与电池安装类 型的焊枪相比循环时间延长。 • 成为焊枪更换对象的电机,必须通过相同的放大器进行控制。 • 与多任务不对应。(不能通过多个程序来同时进行焊枪更换操作。)
禁止事项
• 在机器人电源被切断时请勿强制拆下焊枪。 • 带有焊枪更换功能的系统,不能使用线路跟踪功能。
伺服焊枪结构
焊枪绝缘垫片
焊接变压器
伺服枪软、硬件
伺服焊枪用附加轴放大器 软件名称 Servo
ARP 线缆 (con troller to J1)
软件编号 1A05B-2500-H869 1A05B-2500-J643
Robot内部走线
Servo gun option
ARP线缆(J3-J6) Fanuc servo motor
手动加压功能
厚度检测功能
工件厚度检查功能主要为检测如下事项的一种功能。 ������ 1、 加压对象工件的存在确认 ������ 2、错误工件的焊接
为将工件厚度检查功能置于有效,需要进行伺服枪自动 调节应用的“Thickness Check Calibration”(工件厚度检查校正)。另外,还受 到如下限制。 1. 齿轮比必须正确。 2. 调校位置正确。通过焊嘴磨损补偿更新调校位置。 (焊嘴磨损补偿功能包含 在本功能中。) 3. 测量时,固定侧焊嘴应接触工件。没有间隙。(应进 行正确的示教和焊枪挠曲补偿。)
2、稳定 从焊接工艺来说,伺服焊枪对焊接加压过程、压 力值控制精准稳定,从而相对气动焊枪可以实现更 好的焊点外观和质量。
优点三:
3、行程柔性 由于使用伺服控制,焊枪开口可以根据工件情况 任意设定所需要的开口大小,相比较气动焊枪的单、 双行程,极大的提高了行程的柔性。
伺服焊枪结构分解
焊枪臂(部分) FANUC 伺服电机
伺服枪零位设置
STEP2:消除SRVO-075报警 在SRVO-068报警消除后,JOG伺服枪轴(焊枪开关行程内),之 后按reset键即可消除该报警。
报警消除后,将焊枪关闭,用一张薄纸夹在两个 电极之间,焊枪关闭到纸张恰好没有卡住时,在 上图界面按F4(EXEC)完成焊枪零点的标定
伺服枪软件设置
换枪功能设置
换枪指令介绍
焊枪分离指令
通过执行该指令,可不用切断电源就使焊枪分离。在选择位置对合动作类型7或 者8的情况下,在使焊枪分离前,焊枪自动关闭,在焊枪关闭位置设定参照点。 指令格式: GUN DETACH[i](焊枪 分离) i: 焊枪编号(1~6)指定当前所连结的焊枪编号。可根据寄存器及程序的自变量进行间接指定。例: GUN DETACH[1] GUN DETACH[R[2]] GUN DETACH[AR[1]]