第六章刚体力学
理论力学刚体运动

Ek ( t ) Ek ( t0 ) A外
§6.2 作用在刚体上的力系 一、力系
1、定义:同时作用在一个刚体的一组力称为力系。
2、分类: ①共面力系:所有的力位于同一平面内。 a) 共点力系(汇交力系):所有力的作用线交 于一点的力系。 b) 平行力系:所有力互相平行或反平行。 ②异面力系:力的作用线不在一个平面内。
二、力系等效
1、等效力系的定义 如果在两个力系作用下,刚体的运动相同,则这 两个力系互为等效力系。
2、力系的等效条件:
F1i F2 j
r1i F1i r1 j F1 j
i j
i
j
3、零力系:力系力的矢量和为零,对固定参考点 的力矩和为零的力系。 说明:①所有的零力系都等效 ②任何力系加上零力系后与原力系等效 ③最简单的零力系是一对平衡力组成的力系
2
角动量定理: dL dt
M外
2、平衡条件: Fi 0,
i
且 Mi 0
i
(对任一定点成立)
例 质量为 m ,长为 a 的匀质杆 AB 由系于两端长是 a 的线悬于 O 点,在 B 端挂质量为 m 的重物。求平衡 时杆与水平方向的夹角θ及每根线中的张力 TA 和 TB 。
2、异面力系: 等效于一个单力与一个力偶
z -F3 A F1
F F3
O
x
B F2
y
§6.3 刚体的平衡
刚体运动 平动: 直线平动、曲线平动
转动: 定轴转动、一般转动 平动:运动过程中刚体任一直线的方向保持不变。
转动:刚体上一直线相对参考系的角度发生变化。
O
刚体的一般运动(n=6)
O
力学第三版习题答案
力学第三版习题答案第一章:力学的基本概念- 习题1:解释质量、重量、惯性的区别和联系。
答案:质量是物体的固有属性,与物体所含物质的多少有关。
重量是地球对物体的引力作用,与物体的质量和地球的引力加速度有关。
惯性是物体保持其运动状态不变的能力,与物体的质量成正比。
- 习题2:一个物体的质量为2kg,求其在地球表面受到的重力。
答案:重力G = mg,其中m是质量,g是地球的引力加速度(约为9.8m/s²)。
因此,G = 2kg * 9.8m/s² = 19.6N。
第二章:牛顿运动定律- 习题3:一个物体在水平面上受到一个恒定的力F=10N,求其加速度。
答案:根据牛顿第二定律F=ma,其中F是作用力,m是物体的质量,a是加速度。
如果物体的质量为m,则a = F/m = 10N/m。
第三章:功和能量- 习题4:一个物体从静止开始,经过一段距离后,速度达到v,求外力所做的功。
答案:功W = ΔK,其中ΔK是动能的变化。
动能K = 1/2mv²,因此W = 1/2mv² - 0 = 1/2mv²。
第四章:动量和动量守恒- 习题5:一个质量为m的物体以速度v1撞击一个静止的质量为2m的物体,求碰撞后两物体的速度。
答案:在没有外力作用的情况下,系统动量守恒。
设碰撞后两物体的速度分别为v2和v3,则mv1 = mv2 + 2mv3。
解得v2 = (3/3)v1,v3 = (-1/3)v1。
第五章:圆周运动- 习题6:一个物体在水平面上做匀速圆周运动,其速度为v,求其向心加速度。
答案:向心加速度a_c = v²/r,其中r是圆周运动的半径。
第六章:刚体的转动- 习题7:一个均匀的圆盘,其质量为M,半径为R,关于通过其中心的轴转动。
求其转动惯量。
答案:对于均匀圆盘,其转动惯量I = 1/2MR²。
第七章:流体力学- 习题8:解释伯努利定律,并给出其数学表达式。
工程力学 第六章:平面杆件体系的几何组成分析

瞬变体系
工 程 力 学
无多余约束的几何 不变体系变体系
几种常用的分析途径 1、去掉二元体,将体系化简单,然后再分析。 2、如上部体系与基础用满足要求的三个约束相联可去 掉 基础,只分析上部。 3、当体系杆件数较多时,将刚片选得分散些,用链杆组 成的虚铰相连,而不用单铰相连。 4、由一基本刚片开始,逐步增加二元体,扩大刚片的范 围,将体系归结为两个刚片或三个刚片相连,再用规则判定。 5、由基础开始逐件组装 6、刚片的等效代换:在不改变刚片与周围的连结方式的 前提下,可以改变它的大小、形状及内部组成。即用一个等效 与外部连结等效)刚片代替它。
β
A P
A
β
Δ是微量
P N N
只有几何不变体系才 能作为建筑结构使用!!
§6.2刚片、自由度和约 束的概念
• 一、刚片 • 是指平面体系中几何形状不变的平面体。 • 在几何组成分析中,由于不考虑材料的应 变,所以,每根梁、每一杆件或已知的几 何不变部分均可视为刚片。 • 支承结构的地基也可以看做是一个刚片。
a
1、单链杆:仅在两处与其它物体用铰相连,不论其形 状和铰的位置如何。
一根链杆可以减少 体系一个自由度,相 工 当于一个约束。! 程 力 β 学
α
Ⅰ
1 5 3 6 4
1、2、3、4是链杆, 5、6不是链杆。
加链杆前3个自由度
加链杆后2个自由度
2、单铰: 联结 两个 刚片的铰 加单铰前体系有六个自由度 加单铰后体系有四个自由度
三刚片以三个无穷远处虚铰相连 组成瞬变体系
工 程 力 学
4、由一基本 刚片开始,逐 步增加二元体, 扩大刚片的范 围,将体系归 结为两个刚片 或三个刚片相 连,再用规 则判定。
理论力学课后知识题目解析第6章刚体的平面运动分析

第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角θ 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωhv AC v AP v ABθθω2000cos cos ===习题6-1图ABCv 0hθ习题6-2图PωABv CABCv ohθ习题6-2解图习题6-3解图习题6-3图v A = vv B = v ωAωBR vR v B B 22==ω B A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
哈工大版理论力学复习题
理论力学复习题一、是非题1. 若一平面力系向A,B两点简化的结果相同,则其主矢为零主矩必定不为零。
2. 首尾相接构成一封闭力多边形的平面力系是平衡力系。
3. 力系的主矢和主矩都与简化中心的位置有关。
4. 当力系简化为合力偶时,主矩与简化中心的位置无关5.平面一般力系平衡的充要条件是力系的合力为零。
二、选择题1.将平面力系向平面内任意两点简化,所得的主矢相等,主矩也相等,且主矩不为零,则该力系简化的最后结果为------。
①一个力②一个力偶③平衡2.关于平面力系的主矢和主矩,以下表述中正确的是①主矢的大小、方向与简化中心无关②主矩的大小、转向一定与简化中心的选择有关③当平面力系对某点的主矩为零时,该力系向任何一点简化结果为一合力④当平面力系对某点的主矩不为零时,该力系向任一点简化的结果均不可能为一合力3.下列表述中正确的是①任何平面力系都具有三个独立的平衡方程式②任何平面力系只能列出三个平衡方程式③在平面力系的平衡方程式的基本形式中,两个投影轴必须相互垂直④平面力系如果平衡,该力系在任意选取的投影轴上投影的代数和必为零4. 图示的四个平面平衡结构中,属于静定结构的是三、填空1. 图示桁架。
已知力1p 、 和长度a 。
则杆1内力=_________; 杆2内力=_________; 杆3内力=_________。
2. 矩为M =10k N .m 的力偶作用在图示结构上。
若 a =1m ,不计各杆自重,则支座D 的约束力=_________,图示方向。
3. 一平面汇交力系的汇交点为A ,B为力系平面内的另一点,且满足方程。
若此力系不平衡,则力系简化为_________。
4.若一平面平行力系中的力与Y 轴不垂直,且满足方程0y F =∑。
若此力系不平衡,则力系简化为_________。
答案:一、1、×2、×3、×4、√5、×二、1、② 2、① 3、④ 4、③三、1、0、P 1、0 2、=10KN(--)(提示:先从CB 及绳处断开,以右部分为研究对象,以B 为矩心,列力矩方程,则D 处竖直方向力为零,再以整体为研究对象以A 为矩心,列力矩方程可求出D 处)3.过A 、B 两点的一个力4、一个力偶第三章 练习题一、是非题1.力对点之矩是定位矢量,力对轴之矩是代数量。
复试理论力学重点面试问题知识点总结(主要)
复试理力重点知识点总结静力学第一章静力学基础1、掌握平衡、刚体、力的概念以及等效力系和平衡力系,静力学公理。
2、掌握柔性体约束、光滑接触面约束、光滑铰链约束、固定端约束和球铰链的性质。
3、熟练掌握如何计算力的投影和平面力对点的矩,掌握空间力对点的矩和力对轴之矩的计算方法,以及力对轴的矩与对该轴上任一点的矩之间的关系。
4、对简单的物体系统,熟练掌握取分离体并画出受力图。
第二章力系的简化1、掌握力偶和力偶矩矢的概念以及力偶的性质。
2、掌握汇交力系、平行力系、力偶系的简化方法和简化结果。
3、熟练掌握如何计算主矢和主矩;掌握力的平移定理和空间一般力系和平面力系的简化方法和简化结果。
4、掌握合力投影定理和合力矩定理。
5、掌握计算平行力系中心的方法以及利用分割法和负面积法计算物体重心。
第三章力系的平衡条件1、了解运用空间力系(包括空间汇交力系、空间平行力系和空间力偶系)的平衡条件求解单个物体和简单物体系的平衡问题。
2、熟练掌握平面力系(包括平面汇交力系、平面平行力系和平面力偶系)的平衡条件及其平面力系平衡方程的各种形式;熟练掌握利用平面力系平衡条件求解单个物体和物体系的平衡问题。
3、了解静定和静不定问题的概念。
4、掌握平面静定桁架计算内力的节点法和截面法,掌握判断零力杆的方法。
第四章摩擦1、掌握运用平衡条件求解平面物体系的考虑滑动摩擦的平衡问题。
2、了解极限摩擦定律、滑动摩擦系数、摩擦角、自锁现象、摩阻的概念。
运动学第五章点的运动1、掌握描述点的运动的矢量法、直角坐标法和弧坐标法,能求点的运动方程。
2、熟练掌握如何计算点的速度、加速度及其有关问题。
第六章刚体的基本运动1、掌握刚体平动和定轴转动的特征;掌握刚体定轴转动的转动方程、角速度和角加速度;掌握定轴转动刚体角速度矢量和角加速度矢量的概念以及刚体内各点的速度和加速度的矢积表达式。
2、熟练掌握如何计算定轴转动刚体的角速度和角加速度、刚体内各点的速度和加速度。
第六章 刚体质点组力学(1)2012
⎛1 0 0 ⎞ ⎟ R=⎜ ⎜0 1 0 ⎟ ⎜ 0 0 −1⎟ ⎝ ⎠
记 Rr 为 r′ ,即 r′ = Rr 。由于
r = x1e1 + x2e 2 + x3e 3 = ∑ xi ei
i =1
3
由 R 的线性性,得
∑ xi′ei = r′ = Rr = ∑ x j Re j = ∑ x j ∑ Rijei
பைடு நூலகம்
′ , x′ ′ ϕ ( x1 , x2 , x3 ) = ϕ ′( x1 2 , x3 )
成立,则称 ϕ 是标量。 注意:当坐标变换之后,函数形式可能发生了改变(因此,记为 ϕ ′ ) ,但只要 ( x1 , x2 , x3 ) 和
′ , x′ ′ ( x1 2 , x3 ) 表示同一个点,则它们的值就相等。
6.1.2 正交变换(数学 II)
刚体有两种基本运动的运动形式,一是平动(translation) ,一是转动(rotation) 。 所谓平动是指刚体上任意两点的联线在整个运动过程中始终保持其原来的方向不变,或 者说,任意两点的联线始终与其初始位置平行的运动。
P′
P
Q′ Q
刚体的平动
刚体的转动则是指刚体上有两个点(实际上这两点连线上所有的点)始终保持不动的运 动。这两个点构成的直线称为转动轴。此时,刚体上所有各点都绕转动轴作圆周运动。
det | RR T |= det | R | ⋅ det | R T |= (det | R |) 2 = det | I |= 1
所以
det | R |= ±1
当 det | R |= +1 时, 对应的正交变换称为正当转动, 它表示空间内的旋转变换; 而当 det | R |= −1 时,正交变换为非正当转动,表示空间内的反演变换。 考察正交矩阵
第六章刚体动力学_大学物理
第七章机械振动刚体转动的角坐标、角位移、角速度和角加速度的概念以及它们和有关线量的关系刚体定轴转动的动力学方程,熟练使用刚体定轴转动定律刚体对固定轴的角动量的计算,正确应用角动量定理及角动量守恒定理掌握刚体的概念和刚体的基本运动理解转动惯量的意义及计算方法,会利用平行轴定理和垂直轴定理求刚体的转动惯量掌握力矩的功,刚体的转动动能,刚体的重力势能等的计算方法了解进动现象和基本描述§6.1 刚体和自由度的概念一. 力矩力是引起质点或平动物体运动状态(用动量描述)发生变化的原因.力矩则是引起转动物体运动状态(用动量聚描述)发生变化的原因.将分解为垂直于z 轴和平行于z 轴的两个力及,如右图.由于不能改变物体绕z 轴的转动状态,因此定义对转轴z 的力矩为零.这样,任意力对z 轴的力矩就等于力对z 轴的力矩,即力矩取决于力的大小、方向和作用点.在刚体的定轴转动中,力矩只有两个指向,因此一般可视为代数量.根据力对轴的力矩定义,显然,当力平行于轴或通过轴时,力对该轴的力矩皆为零.讨论:(1)力对点的力矩.(2) 力对定轴力矩的矢量形式力矩的方向由右螺旋法则确定.(3) 力对任意点的力矩,在通过该点的任一轴上的投影,等于该力对该轴的力矩.例: 已知棒长L,质量M,在摩擦系数为μ 的桌面转动(如图)求摩擦力对y 轴的力矩.解: 以杆的端点O 为坐标原点,取Oxy坐标系,如图在坐标为x 处取线元dx,根据题意,这一线元的质量和摩擦力分别为则该线元的摩擦力对y轴的力矩为积分得摩擦力对y轴的力矩为注: 在定轴转动中,力矩可用代数值进行计算,例如二. 刚体对定轴的转动定律实验证明: 当力矩M为零时,则刚体保持静止或匀速转动,当存在M时,角加速度β与M成正比,而与转动惯量J 成反比,即.也可写成国际单位中k=1.若设作用在刚体上的外力对z轴的力矩总和为合外力矩,刚体对z 轴的转动惯量为J, 则有上式表明,刚体绕定轴转动时,刚体对该轴的转动惯量与角加速度的乘积,等于作用在刚体上所有外力对该轴的力矩的代数和.该式称为刚体绕定轴转动微分方程,也称转动定律.讨论:(1) M 正比于β ,力矩越大,刚体的β越大(2) 力矩相同,若转动惯量不同,产生的角加速度不同(3) 与牛顿定律比较,转动定律的理论证明:如右图,在刚体上任取一质量元,作用在质量元上的力可以分为两类:表示来自刚体意外一切力的合力(称外力),表示来自刚体内各质点对该质量元作用力的合理(称内力).刚体绕定轴Z 转动过程中,质量元以为半径作圆周运动,按牛顿第二定律,有将此矢量方程两边都投影到质量元的圆轨迹切线方向上,则有再将此式两边乘以,则得对固定轴的力矩对所有质量元求和,则得等式右边第一项为合外力矩;第二项为所有内力对z 轴的力矩总和,由于内力总是成对出现,而且每对内力大小相等、方向相反,且在一条作用线上,因此内力对z 轴的力矩的和恒等于零.又.则有即证.三. 转动惯量刚体对某Z 轴的转动惯量,等于刚体上各质点的质量与该质点到转轴垂直距离平方的乘积之和,即事实上刚体的质量是连续分布的,故上式中的求和可写为定积分,即刚体对轴转动惯量的大小决定于三个因素,即刚体的质量、质量对轴的分布情况和转轴的位置.(1) J 与刚体的总质量有关例 1 两根等长的细木棒和细铁棒绕端点轴转动惯量解:在如图的棒上取一线元dx,则积分得其转动惯量为显然,本题中,则(2) J 与质量分布有关例2 圆环绕中心轴旋转的转动惯量解: 在如图的圆环上取一线元dl,则积分得其转动惯量为例3 圆盘绕中心轴旋转的转动惯量解: 在如图的圆盘上取一宽为dr的圆环带,令,则质量元则积分得圆盘的转动惯量为(3) J 与转轴的位置有关例 4 均匀细棒绕端点轴转动惯量解: 在如图棒上取一线元dx,积分得棒的转动惯量为例 5 均匀细棒对通过中心并与棒垂直得轴的转动惯量解: 如图,以杆的中心O为坐标原点,取Oxz坐标系.积分得棒对z轴的转动惯量为四. 平行轴定理及垂直轴定理1. 平行轴定理设刚体得质量为M,质心为C,刚体对通过质心某轴z(称为质心轴)得转动惯量为.如有另一与z 轴平行的任意轴,且z和两轴间的垂直距离L.刚体对轴的转动惯量设为,则可以证明:.即刚体对任意轴(轴)的转动惯量等于刚体对通过质心并与该轴平行的轴(z轴)的转动惯量加上刚体的质量与两轴间垂直距离L平方的乘积.这个结论称为平行轴定理.例1 : 求均匀细棒的转动惯量.解: 如图,已知均质杆对质心轴z 的转动惯量为,为通过杆的一端、且与z 轴平行的轴的转动惯量,按平行轴定理有2.垂直轴定理如右图所示, x、y轴在刚体内, z轴垂直于刚体.则刚体对z 轴的转动惯量等于其对x、y轴的转动惯量之和此即为垂直轴定理.例求对圆盘的一条直径的转动惯量解:以圆盘圆心C为坐标圆点,建立xyz 坐标系如右图.易求得圆盘对z 轴的转动惯量为根据垂直轴定理,有又则五. 转动定律的应用举例例1 一轻绳绕在半径r =20 cm 的飞轮边缘,在绳端施以F =98 N 的拉力,飞轮的转动惯量J =0.5 kg·m 2,飞轮与转轴间的摩擦不计,(如图)求: (1) 飞轮的角加速度(2) 如以重量P =98 N 的物体挂在绳端,试计算飞轮的角加速度解: (1) 根据转动定律,有(2) 分别对物体和飞轮进行受力分析,如图所示,根据牛顿运动定律和转动定律,有,因为,所以有例2一根长为l , 质量为m 的均匀细直棒,可绕轴O 在竖直平面内转动,初始时它在水平位置求它由此下摆角时的解: 在直棒上取如图的质量元dm ,则积分得整个直棒重力对轴O的力矩为又故由上式可以看出,重力对整个棒的合力矩等于重力全部集中于质心所产生的力矩.则角加速度为:又, 则杆下摆至角速度为例3圆盘以在桌面上转动,受摩擦力而静止求到圆盘静止所需时间解:在圆盘内取一半径为r 的,厚度为dr 的环带, 其质量为该环带的摩擦力对质心轴的力矩为积分得圆盘的摩擦力力矩为由转动定律得所以,得则例4如图一个刚体系统,已知转动惯量,现有一水平作用力作用于距轴为处求轴对棒的作用力(也称轴反力)解: 设轴对棒的作用力为N,分解为.由转动定律得由质心运动定理得解得打击中心则思考题1. 刚体可有不止一个转动惯量吗? 除了刚体的形状和质量以外,要求它的转动惯量,还要已知什么信息?2.能否找到这样一个轴,刚体绕该轴的转动惯量比绕平行于该轴并通过质心的轴的转动惯量小?3.刚体在力矩作用下绕定轴转动,当力矩增大或减小时,其角速度和角加速度将如何变化?4.猫有一条长长的尾巴,它习惯于在阳台上睡觉,因而从阳台上掉下来的事情时有发生.长期的观察表明猫从高层的楼房的阳台掉到楼外的人行道上时,受伤的程度将随高度的增加而减少,据报道有只猫从32层楼掉下来,也仅仅只有胸腔和一颗牙齿有轻微的损伤.为什么会这样呢?(点击图片播放动画)§ 6.2 绕定轴转动刚体的动能动能定理一. 转动动能刚体I 绕定轴z 转动,转动惯量,某时刻t ,角速度ω ,角加速度为β,设想刚体是由大量质点组成,现研究质量为的质点i,如图.显然,质点i 的速度为,由质点动能的定义知,质量i 的动能为由于动能为标量且永为正,故整个刚体的动能E等于组成刚体所有质点动能的算数和,即即绕定轴转动刚体的动能,等于刚体对转动的转动惯量于其角速度平方乘积的一半. 将刚体绕定轴转动的动能与质点的动能加以比较,再一次看出转动惯量对应于质点的质量,即转动惯量是刚体绕轴转动惯性大小的量度.二.力矩的功力的累积过程——力矩的空间累积效应功的定义如图,设绕定轴z 转动刚体上P 点作用有一力,现研究刚体转动时力在其作用点P 的元路程ds 上的功.由图易得即作用在定轴转动刚体上的力的元功,等于该力对转轴的力矩于刚体的元角位移的乘积.这也称为力矩的元功.力矩作功的微分形式对一有限过程刚体从角坐标到的过程中,力矩对刚体所作的功为若力矩M为常数,则上式可以进一步写成既作用在定轴转动刚体上的常力矩在某一转动过程中对刚体所作的功,等于该力矩与刚体角位移的乘积.讨论:(1) 合力矩的功(2) 力矩的功就是力的功(3) 内力矩作功之和为零三. 转动动能定理——力矩功的效果力矩的元功此式表示绕定轴转动刚体动能的微分,等于作用在刚体上所有外力元功的代数和.这就是绕定轴转动刚体的动能定理的微分形式. 若定轴转动的刚体在外力作用下,角速度从变到,则由微分式,可得到式中A 表示刚体角速度从变到这一过程中,作用于刚体上的所有外力所作功的代数和. 上式表明,绕定轴转动刚体在任一过程中动能的增量,等于在该过程中作用在刚体上所有外力所作功的总和.这就是绕定轴转动刚体的动能定理的积分形式.刚体的机械能等于刚体的动能、重力势能之和.其中的重力势能为故刚体的机械能又可表示为刚体的机械能守恒,则有对于包括刚体的系统,功能原理和机械能守恒定律仍成立.例1一根长为l , 质量为m 的均匀细直棒,可绕轴O 在竖直平面内转动,初始时它在水平位置求它由此下摆角时的解: 易得杆摆至角时对O 轴的力矩为由动能定理,重力矩作的功得又,由此得即例2图示装置可用来测量物体的转动惯量.待测物体A 装在转动架上,转轴Z 上装一半径为r的轻鼓轮,绳的一端缠绕在鼓轮上,另一端绕过定滑轮悬挂一质量为m 的重物.重物下落时,由绳带动被测物体A绕Z 轴转动.今测得重物由静止下落一段距离h .所用时间为t .求物体 A 对Z 轴的转动惯量.设绳子不可伸缩,绳子、各轮质量及轮轴处的摩擦力矩忽略不计.待测物 A 的机械能:重物m 的机械能:由机械能守恒得:又则可得故,物体 A 对Z 轴的转动惯量为思考题1.两个重量相同的球分别用密度为的金属制成,今分别以角速度绕通过球心的轴转动,试问这两个球的能量之比多大?§ 6.3 动量矩和动量矩守恒定律一. 质点动量矩( 角动量) 定理和动量矩守恒定律1.质点的动量矩设一质点在平面S ,如图所示.在时刻t,质点的动量为,对某固定点O质点的位矢为,则质点对O点的动量矩(或质点对O点的角动量)定义为: 位矢和动量的矢积,即根据矢积定义,质点对O点动量的大小为:指向由右螺旋法则确定.(可以证明,质点对某点的动量矩,在通过该点的任意轴上的投影就等于质点对该轴的动量矩)特例:质点作圆周运动时,说明: (1) 质点的动量矩与质点的动量及位矢(取决于固定点的选择)有关(2) 当质点作平面运动时,质点对运动平面内某参考点O 的动量矩也称为质点对过O 垂直于运动平面的轴的动量矩例一质点m ,速度为v ,如图所示A、B、C 分别为三个参考点,此时m 相对三个点的距离分别为.求此时刻质点对三个参考点的动量矩解: 质点对某点的动量矩, 在通过该点的任意轴上的投影就等于质点对该轴的动量矩2. 质点的动量矩定理质点为m 的质点,在力的作用下运动,某一时刻t ,质点相对固定点O 的位矢为,速度为,按上述质点动量矩的定义,有两边对时间求导,得由于,故上式右边第二项为零,而第一项中,因此,上式右边第二项是作用在质点上所有力的合力对O 点的力矩,即此式表明,在惯性系中,质点对任意固定点O的动量矩对时间的导数,等于作用在质点上所有力的合力对同一点O 的力矩.这就是质点动量矩定理.质点动量矩定理的微分形式:质点动量矩定理的积分形式:质点所受合力矩的冲量矩等于质点的动量矩的增量说明:(1) 冲量矩是质点动量矩变化的原因(2) 质点动量矩的变化是力矩对时间的积累结果质点动量矩定理也可直接用来求解质点动力学问题,特别是质点在运动过程中始终和一个点或一根轴相关联的问题,例如单摆运动,行星运动等问题.3. 质点动量矩守恒定律在质点动量矩定理可以看出,当作用在质点上的合力对固定点的力矩恒为零时,质点对该点的动量矩为常矢量,即若时,=常矢量这就是质点动量守恒定律.讨论:(1) 动量矩守恒定律是物理学的基本定律之一,它不仅适用于宏观体系,也适用于微观体系, 且在高速低速范围均适用(2) 通常对有心力:过O 点,M= 0, 动量矩守恒.例如由动量矩守恒定律可导出行星运动的开普勒第二定律行星对太阳的位矢在相等的时间内扫过相等的面积例发射一宇宙飞船去考察一质量为M 、半径为R 的行星, 当飞船静止于空间距行星中心4R 时,以速度发射一质量为m 的仪器.要使该仪器恰好掠过行星表面求θ 角及着陆滑行的初速度多大解:由引力场(有心力)系统的机械能守恒得由质点的动量矩守恒得则所以有二. 刚体定轴转动的动量矩定理和动量矩守恒定律1. 刚体定轴转动的动量矩刚体以角速度ω 绕定轴z转动时,刚体上任意一点均在各自所在的垂至于z轴的平面那作圆周运动,如图.由于刚体上任一质点对z轴的动量矩都具有相同的方向(或者说都具有相同的正负号),因此整个刚体对z轴的动量矩应为各质点对z轴的动量矩之和,即上式表明,绕定轴转动刚体对z 轴的动量矩,等于刚体对该轴的转动惯量与角速度的乘积.2. 刚体定轴转动的动量矩定理将动量矩表达式对时间求导,得由于刚体对给定轴的转动惯量是一常量,因此利用前面讲过的转动定律,可以将上式进一步写成上式表明,绕定轴转动刚体对z轴的动量矩对时间的导数,等于作用在刚体上所有外力对z轴的力矩的代数和.这就是刚体绕定轴转动情况下的动量矩定理.动量矩定理微分形式:将上式两边乘以dt并积分,得动量矩定理积分形式:,分别表示在时刻转动刚体对z轴得动量矩,成为在时间内对z 轴得冲量矩.冲量矩表示了力矩在一段时间间隔内的积累效应.上式表明,定轴转动刚体的动量矩在某一时间间隔内的增量,等于同一时间间隔内作用在刚体上的冲量矩.3. 刚体绕定轴转动的动量矩守恒定律当作用在定轴转动刚体上的所有外力对转轴的力矩代数和为零时,根据动量矩定理式,刚体在运动过程中动量矩保持不变(守恒),即=0时,=常量.以上的讨论是对绕定轴转动的刚体进行的.对绕定轴转动的可变形物体来说,如果物体上各点绕定轴转动的角速度相同,即可用同一角速度来描述整个物体的转动状态,则某一时刻t , 物体对转动轴的动量矩也可表示为该物体在时刻t 对同一轴的转动惯量与角速度的乘积.只是由于物体上各点相对于轴的位置是可变的,所以对轴的转动惯量不再是一个常量,可表示为可以证明,这是可变形物体对转轴的动量矩对时间的导数仍然等于作用于该可变形物体的所有外力对同一轴的力矩的代数和,即仍成立. 这时如果作用在可变形物体上所有外力对该轴的力矩的代数和恒为零,则在运动过程中,可变形物体对转轴的动量矩保持不变(守恒).更一般地说,如果作用在质点系上所有外力对某一固定轴的力矩之和为零,则质点系对该轴的动量矩保持不变,这是动量矩守恒定律的更为一般的表述形式.动量矩守恒定律在实际生活中及工程中有着广泛的应用.例如花样滑冰的表演者可以容过伸展或收回手脚(改变对轴的转动惯量)的动作来调节旋转的角速度.例一长为l 的匀质细杆,可绕通过中心的固定水平轴在铅垂面内自由转动,开始时杆静止于水平位置.一质量与杆相同的昆虫以速度垂直落到距O点l /4 处的杆上,昆虫落下后立即向杆的端点爬行,如图所示.若要使杆以匀角速度转动.求昆虫沿杆爬行的速度解:设杆和昆虫的质量均为m ,昆虫与杆碰后以共同的角速度转动.昆虫落到杆上的过程为完全非弹性碰撞,对于昆虫和杆构成的系统,和外力矩为零,动量矩守恒,故有化简此式可得杆的转动角速度,即由题可知,此后杆以此角速度作匀速转动.设碰后t 时刻,杆转过角,昆虫爬到距O 点为r的位置处, 此时,昆虫和杆系统所受合外力矩为根据动量定理,有由题设不变,所以其中的值为带入上式有因此,为了使保持不变,昆虫的爬行速率应为说明:此题使一个系统绕定轴转动问题.在解此题的过程中应用了动量矩定理,该定理与刚体绕定轴转动定律的区别.三. 进动如图为一玩具陀螺,我们发现如果陀螺不绕自身对称轴旋转,则它将在起重力对质点O的力矩作用下翻到.但是当陀螺以很高的转速绕自身对称轴(称作自转或自旋)时,尽管陀螺仍然受重力矩作用,陀螺却不会翻到.陀螺的重力对O点的力矩作用结果将使陀螺的自转轴沿虚线所示的路径画出一个圆锥面来.我们称陀螺高速旋转时,其轴绕铅直轴的转动为进动.陀螺绕其对称轴以角速度高速旋转,如下图.对固定点O,它的动量矩L 可近似(未计进动部分的动量矩)表示为作用在陀螺上的力对O 点的力矩只有重力的力矩.显然, 垂至于动量矩矢量,按动量矩定理→可见在极短的时间内,动量矩的增量与d与平行, 也垂直于.这表明,在dt 时间内,陀螺在重力矩作用下,其动量矩的大小未变,但方向却改变了(方向绕铅直轴z 转过了dθ角)事实上,由于,带入动量矩定理式中.得所以,若陀螺自转角速度保持不变,则进动角速度也应保持不变.实际上由于各种摩擦阻力矩的作用,将使不断减小,与此同时,进动角速度Ω 将逐渐增大,进动将变得不稳定.以上的分析是近似的,只适用于自转角速度比进动角速度Ω 大得多得情况.因为有进动的存在,陀螺的总动量矩除了上面考虑到的因自转运动产生的一部分外,尚有进动产生的部分.只有在时,才能不计及因进动而产生的动量矩.思考题1. 如果一个质点在作直线运动,那么质点相对于那些点动量矩守恒?2. 如果作用在质点上的总力矩垂直于质点的动量矩,那么质点动量矩的大小和方向会发生变化吗?3. 当刚体转动的角速度很大时,作用在上面的力及力矩是否一定很大?4. 一个人随着转台转动,两手各拿一只重量相等的哑铃,当他将两臂伸平,他和转台的转动角速度是否改变?5. 试说明: 两极冰山的融化是地球自转速度变化的原因之一.。
6.1 刚体运动学(大学物理)

1、转动惯量
刚体转动时,刚 体内的各质点作圆周 运动,刚体的动能等 于各质点动能之和。
mn
m1
rn
r1
r2 m2
1 1 1 2 2 2 Ek m1v1 m2v2 mnvn 2 2 2 n n 1 1 2 2 mivi mi (ri ) i 1 2 i 1 2 1 n 2 2 ( miri ) 2 i 1
1 l 1 2 2 J ml m ml 结果与前相同。 3 12 2
t
0
1 2 0 0 t t 2
v v 2a( x x0 )
2 2 0
2 ( )
2 2 0 0
匀变速转动
六 角量与线量之间的关系
1、位移与角位移之间的关系 刚体转过 刚体上的一点 位移 s
o
r
s
x
s r
第六章 刚体力学
本章主要内容:
6-1 刚体的运动 6-2 刚体的角动量、转动动能、转动惯量
6-3 力矩
刚体定轴转动定律
6-4 定轴转动的动能定理 6-5 刚体对定轴的角动量守恒定律
6-6 进动*
本章学习要求
2.理解转动惯量、力矩的概念,掌握转动定律。 3.掌握刚体转动的动能定理、角动量定理。
1.掌握刚体定轴转动的特点,理解角坐标、角位移 角速度、角加速度的概念。
1 n 刚体的转动动能 Ek ( miri2 ) 2 2 i 1 1 2 与平动动能比较 Ek mv 2 n 2 miri :相对于转轴的特征的物理量
i 1
转动惯量的定义:
单位:kg ·m2
J m r
i 1
工程力学-第六章

6.1.3 自然坐标法
例 6-1 已知点 M 的运动方程为 x 2t , y t2 ,式中 x 和 y 的单位为 m,t 的单位为 s。试求动点的
运动轨迹,以及当 t 1s 时切向加速度、法向加速度和轨迹的曲率半径。 解:由题目中给出的点的运动方程,消去 t 即可得到点的运动轨迹方程为 x2 4 y (x 0 ,y 0)
等于 dv ,其方向与 Δt→0 时 Δv 的极限方向一致。在国际单位制中,加速度的单位是 m/s2。 dt
6.1.2 直角坐标法
1.点的运动方程
如图所示,设动点 M 相对于一参考直角坐标系 Oxyz 运动,点 M 在空间的位置由它的坐标值 x,y,z
x f1(t)
唯一确定。当点运动时,坐标值
6.1.1 矢量法
2.点的速度
位移 Δr 与对应时间间隔 Δt 的比值,表示点在 Δt 内运动的平均快慢和方向,称为点在该时间间
隔内的平均速度,用 v*表示,即 v* r t
平均速度是一个矢量,其大小等于 r ,方向与位移 r 的方向相同。当 Δt→0 时,点 M′趋近于 t
M,而平均速度 v*趋近于一个极限值,此极限值称为动点 M 在瞬时 t 的瞬时速度,简称速度,用 v 表
6.1.2 直角坐标法
2.点的速度
另一方面,以 vx,vy,vz 表示动点速度 v 在直角坐标轴上的投影,则 v 可表示为 v vxi vy j vzk
对比上述两式,有 vx x ,vy y ,vz z
所以,点的速度在直角坐标系中的投影等于动点对应的坐标对时间的一阶导数。
速度 v 的大小和方向可由它的这三个投影完全确定,速度 v 的大小为 v vx2 vy2 vZ2
第六章
点的运动学和刚体基本运动
《理论力学》第六章 刚体的基本运动习题全解

第六章 刚体的基本运动 习题全解[习题6-1] 物体绕定轴转动的运动方程为334t t -=ϕ(ϕ以rad 计,t 以s 计)。
试求物体内与转动轴相距m r 5.0=的一点,在00=t 与s t 11=时的速度和加速度的大小,并问物体在什么时刻改变它的转向? 解:角速度: 2394)34(t t t dt ddt d -=-==ϕω 角加速度:t t dtddt d 18)94(2-=-==ωα速度: )94(2t r r v -==ω)/(2)094(5.0|20s m r v t =⨯-⨯===ω)/(5.2)194(5.0|21s m v t -=⨯-⨯==切向加速度:rt t r a t 18)18(-=-==ρα法向加速度:22222)94()]94([t r rt r v a n -=-==ρ 加速度: 422222222)94(324])94([)18(t t r t r rt n a a n t -+=-+-=+=)/(8165.0)094(0324|24220s m r a t =⨯=⨯-+⨯== )/(405.1581.305.0)194(1324|24221s m r a t =⨯=⨯-+⨯== 物体改变方向时,速度等于零。
即:0)94(2=-=t r v )(667.0)(32s s t ==[习题6-2] 飞轮边缘上一点M,以匀速v=10m/s运动。
后因刹车,该点以)/(1.02s m t a t =作减速运动。
设轮半径R=0.4m,求M点在减速运动过程中的运动方程及t=2s时的速度、切向加速度与法向加速度。
解:t dtd a t 1.04.022-===ϕρα (作减速运动,角加速度为负)t dt d 25.022-=ϕ12125.0C t dtd +-=ϕ2130417.0C t C t ++-=ϕ12124.005.0)125.0(4.0C t C t dtd R v +-=+-⨯==ϕ104.0005.0|120=+⨯-==C v t图题46-251=C0000417.0|2130=+⨯+⨯-==C C t ϕ 02=C ,故运动方程为: t t 250417.03+=ϕt t t t R s 100167.0)250417.0(4.033+-=+-==ϕ速度方程:1005.02+-=t v)/(8.910205.0|22s m v t =+⨯-== 切向加速度:)/(2.021.01.0|22s m t a t t -=⨯-=-== 法向加速度:222)25125.0(4.0+-⨯==t a n ρω)/(1.240)252125.0(4.0|2222s m a t n =+⨯-⨯==[习题6-3] 当起动陀螺罗盘时,其转子的角加速度从零开始与时间成正比地增大。
第六章 刚体的基本运动
z R a M
n
a = α × r + ω× v
aτ = α × r
α × r = α ⋅ r sin θ = α ⋅ R
O
aτ
v
α ω θ r
ω× r
a
n
= ω × v
ω ⋅ v = ω ⋅ ω ⋅ R = ω
dθ = ωo 其中: dt
所以: bcosθ ⋅ ω o = rcos(θ + ϕ ) ⋅ (ω o + ω )
dϕ =ω dt
*
rcos(θ + ϕ ) ω 解得: ω o = bcosθ − rcos(θ + ϕ )
方程*两边对时间取导数,得:
bcosθ ⋅ ω o = rcos(θ + ϕ ) ⋅ (ω o + ω )
一 、角速度的矢量表示
z
ω
k k
ω
z
ω=ω k
右手螺旋规则:右手的四指代表转动的方向,拇指代表角 速度矢量 ω 的方向。
二、角加速度的矢量表示
角加速度矢量定义:
dω α= dt
角加速度矢
α 为角速度矢 ω 对时间的一阶导数
d dω α = ( ωk) = k dt dt
dω d ϕ = 2 α= dt dt
为描述变速的程度,引入传动比的概念。
ω1 R2 z 2 = = 传动比: i12 = ω 2 R1 z1
ω1 n1 α1 R2 z 2 i12 = = = = = ω 2 n2 α 2 R1 z1
二 、皮带轮传动
n1 R1
vB A vA B R2
理论力学-刚体的简单运动
0 t
0
0t
1t2
2
§6-3 转动刚体内各点的速度和加速度
1.点的运动方程
s R
2.速度
v s R R
3.加速度
at
dv dt
s
R
an
v2
1 R2
R
R 2
4.速度与加速度分布图
v R
a
a2 t
an 2
R
2 4
tan at an 2
§6-4 轮系的传动比
1. 齿轮传动
drA dt
vA
ω rA
ωa
r rM rM0 10,7,11 2,1,3 8,6,8
i jk
v r n r 0.6 0.48 0.64 8 j 6k
86 8
例6-3
一矢量绕z轴以角速度ω转动,若 =a常量
求:da
dt
解: 将矢量的端点A看成是绕z轴作定轴转动刚体上的一点
rA a
从而
da dt
① 啮合条件
R11 vA vB R22
② 传动比
i12
1 2
R2 R1
z2 z1
2.带轮传动
r11 vA vA vB vB r22
i12
1 2
r2 r1
§6-5 以矢量表示角速度和角加速度 以矢积表示点的速度和加速度
1.角速度矢量和角加速度矢量
角速度矢量
大小
d
dt
作用线 沿轴线 滑动矢量
1.定义
刚体上(或其扩展部分)两点保持不动,则这种运动称为刚 体绕定轴转,简称刚体的转动。
转轴 :两点连线
转角: 单位:弧度(rad)
2.运动方程
f t
理力答案_第六章 2
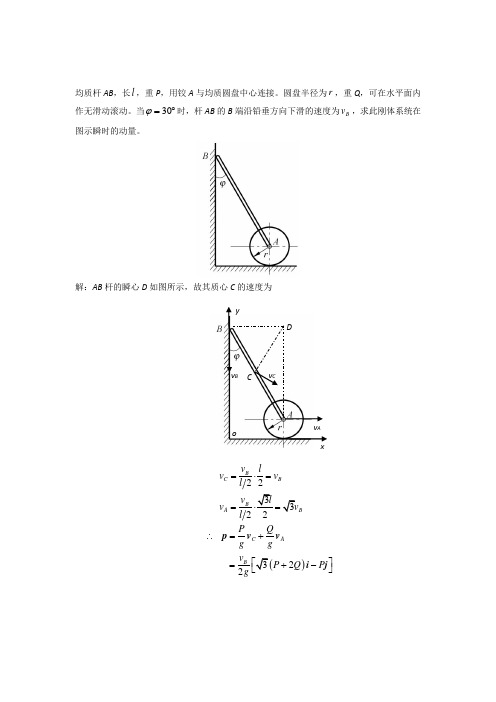
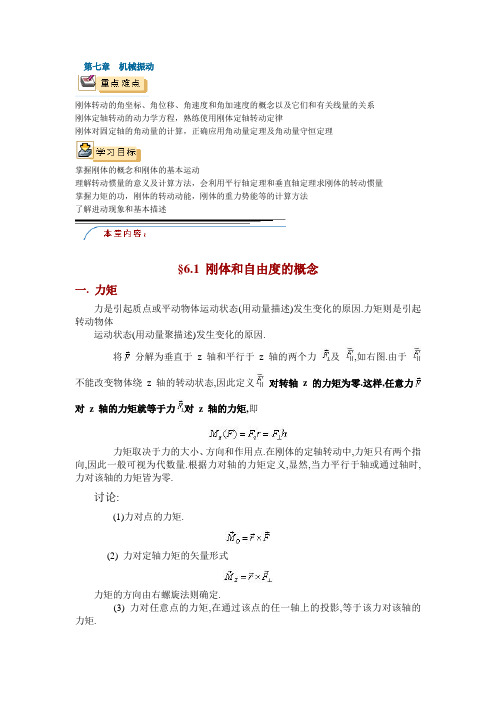
均质杆AB ,长l ,重P ,用铰A 与均质圆盘中心连接。
圆盘半径为r ,重Q ,可在水平面内作无滑动滚动。
当30ϕ=︒时,杆AB 的B 端沿铅垂方向下滑的速度为B v ,求此刚体系统在图示瞬时的动量。
解:AB 杆的瞬心D 如图所示,故其质心C 的速度为() 223 322322B C B B A B C AB v lv v l v l v v l P Qg g vP Q P g=⋅==⋅=∴=+⎡⎤=+-⎣⎦p v v i jA vB v CDCxyo往复式水泵的固定外壳部分D 和基础E 的质量为1m ,均质曲柄OA 长为r ,质量为2m 。
导杆B 和活塞C 作往复运动,其质量为3m 。
曲柄OA 以匀角速度ω绕O 轴转动。
求水泵基础给地面的压力。
解:建立坐标系,x 轴水平向右为正方向,y 轴竖直向上为正方向。
系统中外壳D 和基础E 固定,曲柄OA 作匀速转动,并带动导杆和活塞平动。
系统的总动量为:()j j i p t r m t t rm ωωωωωsin sin cos 232++=由y 方向的动量定理得:d d y y p F t=∑()()()tr m m g m m m N g m m m N t r m t rm ωωωωωωcos 221cos cos 22323213212322++++=++-=+图示凸轮机构中,凸轮半径为r 、偏心距为e 。
凸轮绕A 轴以匀角速ω转动,带动滑杆D 在套筒E 中沿水平方向作往复运动。
已知凸轮质量为m 1,滑杆质量为m 2。
试求在任意瞬时机座螺栓所受的动反力。
解:取凸轮、滑杆和机座组成的系统为研究对象。
由于只求动反力,故不考虑重力,受力图如图示。
凸轮质心的加速度为:t e a x C ωωcos 21-=t e a y C ωωsin 21-=滑杆质心的加速度为:t e a x C ωωcos 22-= 02=y C a由质系动量定理得:F t e m t e m =--ωωωωcos cos 2221N t e m =-ωωsin 21所以:t e m m F ωωcos )(221+-=t e m N ωωsin 21-=图示小球P 沿大半圆柱体表面由顶点滑下,小球质量为2m ,大半圆柱体质量为1m ,半径为R ,放在光滑水平面上。
理论力学习题解答(第六章)

6-1在图示四连杆机构中,已知:匀角速度O ω,OA =B O 1=r 。
试求在°=45ϕ且AB ⊥B O 1的图示瞬时,连杆AB 的角速度AB ω及B 点的速度。
解:连杆AB 作平面运动,由基点法得BA A B v v v +=由速度合成的矢量关系,知φcos v A BA =v杆AB 的角速度)(/AB /O BA AB 2122+==ωωv (逆时针)B 点的速度2245/r cos v O A B ω=°=v (方向沿AB )6-2. 在图示四连杆机构中,已知:3.021===L B O OA m ,匀角速度2=ωrad/s 。
在图示瞬时,11==L OB m ,且杆OA 铅直、B O 1水平。
试求该瞬时杆B O 1的角速度和角加速度。
解:一.求1ω60230..OA v A =×=⋅=ω m/s取A 为基点,则有BA A B v v v += 得 23.0/6.0ctg v v A B ===ϕ m/sm09.2)3.01()3.0/6.0(sin /v v 2/122A BA =+×==ϕ杆B O 1的角速度67630211../BO /v B ===ω rad/s 顺时针 二.求1ε取点A 为基点,则有n BA A a a a a a ++=+ττBA nB B将上式向X 轴投影21222857s /m .B O /ctg v )sin AB /v (OA ctg a )sin /a (a a a sin a cos a sin a BBA n B n BA A B nBA A n B B +=⋅+⋅+⋅−=++−=−=+−ϕϕωϕϕϕϕϕττ杆B O 1的角加速度7.1923.0/8.57/11===B O a B τεrad/s 2逆时针6-3.图示机构中,已知:OA =0.1m , DE =0.1m ,m 31.0=EF ,D 距OB 线为h=0.1m ;rad 4=OA ω。
大学物理课件 理论力学 第六章 刚体的平面运动
2
例如: 曲柄连杆机构中连杆AB的运动, A点作圆周运动,B点作直线运动,AB 杆的运动既不是平动也不是定轴转动, 而是平面运动.
注意: (1)平面运动刚体内各点的运动是不同 的; (2)不能把平面运动与平动混为一谈。
3
请 看 动 画
4
二、刚体的平面运动可以简化为平面图形S在其自身平面内的 运动
A1A2作平动 A点代表A1A2的运动 ...... S代表刚体的运动
因此,在研究平面运动时, 不需考虑刚体的形状和尺寸,只 需研究平面图形的运动,确定平 面图形上各点的速度和加速度.
5
三.运动方程
为了确定平面图形的运动,取静系Oxy,在图形上任取一 点O’(称为基点),并取任一线段O’A,只要确定了O’A的位
平面图形的运动可以看成是绕它的一系列速度瞬心作瞬时转动。 注意:速度瞬心的加速度不为于零。 4.确定速度瞬心位置的方法
①已知图形上一点的速度vA 和图形角
速度,则速度瞬心
AI vA / , AI vA 且I在 vA顺转向绕A点转90º的方向一侧。
②已知一平面图形在固定面上作无滑动的
滚动(或称纯滚动), 则图形与固定面的 接触点I为速度瞬心。
18
⑤已知某瞬时图形上A,B两点的速度方向相 同,且不与AB连线 垂直.
此时, 图形的瞬心在无穷远处,图形的角
速度 =0, 图形上各点速度相等, 这种情况称
为瞬时平动. (此时各点的加速度不相等)
对④(a)的情况,若vA=vB, 也是瞬时平动.
19
例如: 曲柄连杆机构在图示位置时,连杆BC作瞬时平动.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
?
?
d?
dt
?
d 2?
dt 2
单位:弧度/秒2(rad/s2)
方向: d? 方向
? 匀角加速度运动方程:
? ? ?0 ??t
?
?
?0
? ? 0t
?
1?t2
2
?
2
?
?
2 0
?
2?
(?
? ? 0)
类似匀加速直线运动 角量与线量一一对应
2020/4/8
7
第六章 刚体力学
? 角量与线量的关系:
ω 刚体内各质点的角速度、角加速度都相同,
2020/4/8
17
第六章 刚体力学
对O的力矩
? ?M M?
? ? r
r? ??F? ? Fx ?
? r
?
? Fy
对O(M的?力) z矩?的(Zr?轴?分F?量y )z
M z ? rF ysin ? ? RF y M z ? RF sin ? ? Fd
2020/4/8
?? ?
Z
F ? Fx ? Fy
zc
?
?
mi zi m
2020/4/8
11
第六章 刚体力学
刚体的质心
刚体是质量连续分布的物体,可看成由许多质量元dm 组成的质点系,刚体的质心矢径为
?
? rc
?
?ri dm
m
直角坐标系
xc
?
?xi dm
m
? yc ?
yi dm m
对刚体积分
zc
?
?zi dm
m
2020/4/8
12
第六章 刚体力学
? 刚体的平动 刚体上任意两点的连线始终保持平行的运动。
平动过程中,各质点的运动轨
道相同,速度、加速度也都相
B
同,可用任一质点的运动代表
刚体的运动。
A
B? A?
2020/4/8
3
第六章 刚体力学
? 刚体的转动 刚体中所的质点都绕同一直线作圆周运动 。 该直线称为转轴。
? 定轴转动:转动过程中转轴固定不动的转动。 如门窗的运动、飞轮的运动。
2020/4/8
13
第六章 刚体力学
§6.3 刚体的定轴转动
一、刚体相对定轴的角动量 刚体分成许多质量元Δmi
Δmi所在转动平面与定轴的交点为O Δmi相对定轴的角动量的角动量
Li ? ri? mivi ? ? miri2?
ω
o
ri
vi
Δmi
L ? ? Li ? ? ? miri2? ?(? ? miri2)?
2020/4/8
10
第六章 刚体力学
§6.2 刚体的质心运动
一、质心
质心:质点系的质量中心,简称为质心。 质心的质量:等于质点系中各质点质量的总和。 m=? mi 质心的位置:是质点系内各质点的质量加权平均位置。
? rc
?
? i
? mi ri m
直角坐标系
xc
?
?
mi xi m
yc
?
?
mi yi m
二、质心运动定律
质心速度:
? vc
?
? drc dt
?
d dt
????
?
?
mi ri m
????
?
?
? mivi m
? ? ?
质点系总动量:p
?
? pi
?
? mi vi
?
? mvc
质心运动定理:由动量定理
? F
?
? dp dt
?
? m dvc
dt
?
? ma c
物体在运动过程中可以发生形变、旋转、甚至爆炸,但质心的运动总 符合质心运动定理。
工程物理
朱萍 浙江大学物理系
2020年4月8日
第六章 刚体力学
刚体(rigid body)
在外力作用下,形状和大小都不发生变化的物体,称为刚体。 一般的固体可近似地看作刚体。 特殊的质点系:有多个或许多质点组成,质点之间的
相对位置保持不变。
2020/4/8
2
第六章 刚体力学
§6.1刚体的运动
一、刚体的平动和转动
M ? I?
2020/4/8
20
第六章 刚体力学
三、刚体的定轴转动定律
由质点系的角动量定理
? M外 ?
? dL dt
M 外z
?
dLz dt
M外
?
dL dt
?
d (I?
dt
)
?
I
d?
dt
M外 ? I?
刚体对于某一定轴的合外力矩等于刚体对同一转轴的转动惯 量与角加速度的乘积。
L ? I?
? p
?
? mv
2020/4/8
16
第六章 刚体力学
二、对轴的力矩
刚体绕oz轴旋转,力F作用在刚体
P点,且在转动平面内,转动平面
与定轴的交点为o,r为由点o到力
的作用点P的矢径,力F对转轴的
力矩MM定? 义?为r?
?
? F
大小:
M
?
Fr
sin ?
?
Fd
? M
?
o
z?
M
r?
d
P* ?
F
方向:沿转轴
i
i
i
2020/4/8
14
第六章 刚体力学
对O的角动量
? L
?
? r
?
? mv
L ? mvr
对O的角动量的Z轴分量
Lz ? mvr sin? ? mvR
v ? R?
Lz ? mR2?
2020/4/8
Z
ω
L
R θm
v
P
r
θ
O
15
第六章 刚体力学
转动惯量
I ? ? ? miri2 i
I ? ?r 2dm ? ?r 2?dV
Y
R d
F
θ
X
r
α
o
18
第六章 刚体力学
? 当力F不在转动平面内时, 可将力分解为平行于转轴的力 Fz和在转动平面内的力F? , 力Fz不产生对转轴力矩。
? 对转轴的合力矩是刚体所受 外力对转轴力矩的代数和。
2020/4/8
z
? k
? Fz
? F
?
O r?
F? ?
19
第六章 刚体力学
三、刚体的定轴转动定律
? 定点转动:转轴上有一点固定不动,而转轴 的方向不断变化。 如天线、陀螺的运动。
? 刚体的一般运动: 即有平动又有转动,是平动和转动的叠加。 如螺钉的运动、车轮的运动。2020/4/8来自4第六章 刚体力学
转动平面:与转轴垂直的平面
2020/4/8
5
第六章 刚体力学
二、刚体的角速度和角加速度
? 角坐标:刚体内任取一点P, P对转
? Fi ?
? fi
?
?
? mi a i
? Mi
?
r?i
?
? Fi
?
r?i ?
? fi
?
? mr?i ? a?i
Mi ? Fi? ri ? Mi内 ? ? mia? ri ? ? miri2?
z?
Fi? F i o ri? mi Fin
fi
M ? ? Mi ? ? Fi? ri ? ? Mi内 ? M外 ? (? ? miri2 )?
轴的垂线为OP,可用OP与x轴之间的 夹角?来描述刚体的位置,称? 为角坐
?
标,也称角位置,角度? 的微小变化
d? 称角位移。
? 角速度:角坐标? 对时间t的一阶导数
? ? d?
dt
单位:弧度/秒(rad/s)
方向: 右手螺旋方向
2020/4/8
z
? (t)
P
O
x
?? ??
6
第六章 刚体力学
? 角加速度:角坐标? 对时间t的二阶导数
O
但速度、加速度在转动过程中可能不一样。
P点到转轴垂直距离R
ds ? Rd?
d? R
v ? ds ? R?
dt
P O'
a?
?
dv ? R d?
dt dt
? R?
an
?
v2 R
?
(R? )2
R
?
R?
2
2020/4/8
8
第六章 刚体力学
? v
?
ω?
?
? r
2020/4/8
ω
R
v
P
r θ
O
9
第六章 刚体力学