2016-09-27 第5-6次课 波像差概述
波前像差基本理论课件

学习交流PPT
7
波前像差的表示方法- Zernike多项式
低阶像差 高阶像差
学习交流PPT
8
像差的表示方法-均方根(RMS)
有时也称方均根。Root Mean Square(RMS). 将N个项的平方和处以N后开平方的结果,即方均根的结果。
RMS =
WF-RMS= ?
学习交流PPT
9
像差的表示方法-点扩散函数(PSF)
学习交流PPT
5
什么是波前像差? 像差
理想波前
学习交流PPT
6
波前像差的表示方法
Wavefront Aberration 3
mm (superior-inferior)
2
1
0
-1
-2
-3
-3 -2 -1 0 1 2 3 mm (right-left)
3 Dimensional View
2 Dimensional View
表示一点经光学系统成像后的光强分布
学习交流PPT
10
波前像差的检查方法 基于Shack-hartmann原理的Wavescan
学习交流PPT
11Biblioteka 波前像差的检查方法 基于Shack-hartmann原理的Wavescan
学习交流PPT
12
Visx S4 IR 的虹膜识别原理
学习交流PPT
13
Visx S4 IR 虹膜识别眼球跟踪的意义
波前像差基本理论
电话:(O) (M) 地址:成都市一环路北四段215号
学习交流PPT
1
什么是波前(Wavefront)?
平行光线
学习交流PPT
2
什么是波前? 平行光线
光学经典理论光学像差重要知识点详解
光学经典理论光学像差重要知识点详解像差是指实际光学系统中,由非近轴光线追迹所得的结果和近轴光线追迹所得的结果不一致,与高斯光学的理想状况的偏差。
像差是光学理论中一个比较重要的知识点,相信很多朋友们也这么觉得吧!今天为大家整理了一些关于像差的知识,大家可以收藏!像差基础理论实际光学系统的成像是不完善的,光线经光学系统各表面传输会形成多种像差,使成像产生模糊、变形等缺陷。
像差就是光学系统成像不完善程度的描述。
光学系统设计的一项重要工作就是要校正这些像差,使成像质量达到技术要求。
光学系统的像差可以用几何像差来描述,包括:球差定义球差是指光轴的物点由于在Lens上的投射角度不同从而导致在像空间像点在光轴上不重合而导致的像差。
在光学中,球面像差是发生在经过透镜折射或面镜反射的光线,接近中心与靠近边缘的光线不能将影像聚集在一个点上的现象。
这在望远镜和其他的光学仪器上都是一个缺点。
这是因为透镜和面镜必须满足所需的形状,否则不能聚焦在一个点上造成的。
球面像差与镜面直径的四次方成正比,与焦长的三次方成反比,所以他在低焦比的镜子,也就是所谓的“快镜”上就比较明显。
成因对使用球面镜的小望远镜,当焦比低于f/10时,来自远处的点光源(例如恒星)就不能聚集在一个点上。
特别是来自镜面边缘的光线比来自镜面中心的光线更不易聚焦,这造成影像因为球面像差的存在而不能很尖锐的成象。
所以焦比低于f/10的望远镜通常都使用非球面镜或加上修正镜。
一个点光源在负球面像差(上) 、无球面像差(中)、和正球面像差(下)的系统中的成像情形。
左面的影相是在焦点内成像,右边是在焦点外的成像。
来自球面镜的球面像差消球差曲面多用于高倍率显微镜的物镜。
一个消球差薄透镜由一个消球差球面和一个平面经组成,对于平行光。
消球差薄透镜等同一块平板玻璃,对于聚合光束,消球差薄透镜增加光束的聚合度,对于发散光束,消球差薄透镜增加光束的发散度。
球差的校正方法凹凸透镜补偿法和非球面校正球差。
第5讲 波像差概述

旋转对称项
旋转对称项
x x' cos y ' sin y x' cos y ' sin ' cos ' sin ' cos ' sin
x y x' y '
2 2 2
2
x y x' ' y ' '
They are useful for describing the shape of an aberrated wavefront in the pupil of an optical system.
Zernike Polynomials
Orthogonal over the interior of the unit circle Not orthogonal over a discrete set of data points within a unit circle The most important Zernikes are the first 8. (36 OSC Zernikes) Seidel related to Zernike (first 8)
History
Christian Huygens-1678-wave theory Leonard Euler-1746-wave theory of refraction and dispersion Thomas Young-1801-wave nature of light and interference principles Ludwig von Seidel-1857-monochromatic aberrations Seidel-1888-chromatic aberration Zernike-1934- developed polynomial
光学系统的像差

如光学系统存在正畸变即实际像高大于 理想像高,所成的像为枕形,负畸变则 成桶形。
畸变只引起变形,不影响像的清晰度
21
畸变
光学系统对共轭面上不同高度的 物体垂轴放大率不同产生畸变.
桶形畸变 负畸变
枕形畸变
物
正畸变
像
像失真,但不影响像 的清晰度(是由于垂 轴放大率不同).
22
畸变使像变形
23
理想成像的要求 出入射光束为同心光束,只有近轴区成
像才是理想成像。
1
像差概念的导出
实际光学系统中,存在着远轴区产生的实际 像与近轴区产生的理想像之间的偏离。此时, 从物体上任一点发出的光束通过光学系统后 不能会聚为一点,而形成一弥散斑,使像不能 严格地表现出原物体形状,这就是像差。
2
实际光学系统中轴上点的成像
30
近轴物近轴光线成像的色差
123
不同波长的光,焦距不同,像的位置不 同.在1,2,3三截面上,形成的光环半
径不同.
31
色差严重影响光学系统成像性质,一般 光学系统都必须校正色差。可以用正负 透镜适当组合来校正位置色差。
32
影响位置色差的主要因素:
随孔径角的增大而增大 与光学材料的折射率和色散率有关 与透镜的焦距有关
五、色像差
用白光进行成像时,除了每种单色光仍会产生 五种单色像差外,还会因不同色光有不同折射率 造成的色散,而使不同的色光有不同的传播光路, 从而呈现出因不同色光的光路差别而引起的像差, 称之为色像差(简称色差)。色像差因性质不同 而分为位置色差和倍率色差两种。
24
•色差:
位置(轴向)色差 倍率(横向)色差
B
37
倍率色差随视场的增大而增大,由于倍 率色差的存在,使物体边缘呈现彩色, 从而,造成白光所成的像呈现彩色斑。
光学像差

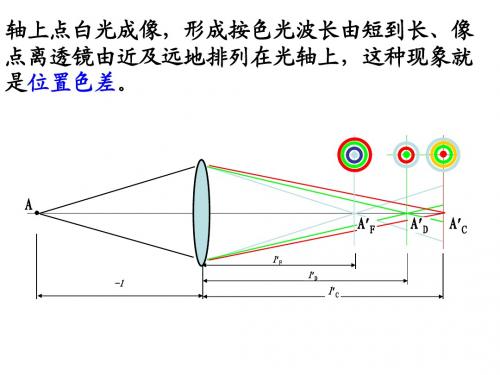
轴上,形成位置色差。
例如:以白光为例,入射白光照明:红光(C)最远; 蓝光(F)离透镜最近; 绿光(D)则居中。 这样假设取一接收屏进行接收,当它分别放置于不同的色光位置处时, 就会出现不同颜色的彩色弥散斑。 2.定义 轴上点两种色光的成像位置的差异,称为位置色差。对于目视光学系 统用ΔL’FC表示,系统对F光和C光消色差:
像散的存在使像面上不同方向的线 条产生不同的清晰度。如果以一组同心
圆和一束径向线条组成的图案为物,与
球面系统共轴放置,如图所示,这时像 散就显得特别明显。若将观察屏垂直于 光轴放置在子午焦线处,所见到的像如 图所示,各同心圆环很清晰,但径向线 条却十分模糊,而且离圆心愈远模糊愈 甚;若将观察屏放在弧矢焦线处,所见 到的像如图所示,径向线条很清晰,但 各同心圆环像却很模糊,同样离圆心愈 远愈模糊愈甚。
像方截距L'等于l’,即球差δL'=0,故展开式中没有常数项;所以球差可
以表示为
L' A1h12 A2 h14 A3 h16 L' a1U12 a2U14 a3U16
初级球差、二级球差、三级球差、高级球差。A1、A2、A3球差系数。大部 分的二级以上的球差很小,可忽略,故可表示为:
正弦差及彗差
一、正弦差
对于轴外点,由于主光线不是系统的对称轴,因而由轴外点发出的同 心光束,经光学系统后,不再相交于一点,对垂轴方向也不与主光线相交, 即相对主光线失去对称性。正弦差就是表示小视场的宽光束的不对称性。 正弦差表示的是轴外物点宽光束经光学系统后失对称的情况。
1、 正弦条件:轴上点和近轴点均成理想像
二、畸变的种类
枕形畸变――正畸变,实际像高>理想像高; 桶形畸变――负畸变,实际像高<理想像高;
第十二章波像差

'2
S OAB
2 n 'hm
2 f '2
1 ' L0.707 12
显然,同样满足瑞利判据,允许的剩余球差要大得多。
3. 若再有三级以上球差,则像差平衡的原则是: 尽可能离焦后有多个大小相等、符号相反 的小面积
以下动画是一个实际光学系统成像质量随离焦量 变化的情况
二、轴外点的波像差及其与垂轴像差的关系 轴外任意一点的像差,可以用y ' , x' 两个分量 表示 ,波差W应表示成与这两个分量之间的关系
Lchz ' 0
Lchm ' l a0
' ch
当0.707环带
Lchz ' 0
几何色差——带光消 校正色差 波色差——边光消,0.707带有最大 剩余波色差,该最大值为极小。
§12-6 光学系统的像差容限
像差校正到什么程度的像差是允许的?(根据使 用条件) 一、小像差系统(如目视光学仪器)——瑞 利判据(要求 最大剩余波像差 ) 4
W (Dn) (dn)
DD为F与C的 中间光程
二.(D-d)法求波色差的优点
1. 不需再计算F、C的实际光路; 2. 校正WFC,可通过δn的改变达到,而保持nD不变 3. 通过修改rk使Dk改变,可以校正残余的WFC 4. 计算精度较高
d i xi xi 1 Di ' cosU i
' 的波面为球面 B0
B 波面与球面 在 P ' 点相切 ' B 波面的法线
是到达该点的 空间光线 波像差——二面之间的距离:QQR n'
'
可导出:
n' W (x' d 'y ' d ' ) R
工程光学讲稿(像差)

§6-2 轴上点的球差 -
一、 球差定义及表示方法
1、轴向球差 由实际光线的光路计算公式知,当物距L为定值时,像距L 与入射高 由实际光线的光路计算公式知,当物距L为定值时,像距L’与入射高 及孔径角U有关,随着孔径角的不同,像距L 是变化的 即如图所示: 是变化的, 度h1及孔径角U有关,随着孔径角的不同,像距L‘是变化的,即如图所示: 轴上点A点发出的光束,对于光轴附近的光用近轴光路计算公式, 轴上点A点发出的光束,对于光轴附近的光用近轴光路计算公式,像点为 A0’(看作高斯像点),对于实际光线采用实际光计算公式,成像于A’1(实 ),对于实际光线采用实际光计算公式 (看作高斯像点),对于实际光线采用实际光计算公式,成像于A 际像)。 际像)。
球差是孔径的偶次方函数,因此 校正球差只能使某带的球差为零。 球差是孔径的偶次方函数,因此, 校正球差只能使某带的球差为零。如 果通过改变结构参数, 使初级球差系数A 和高级球差系数A 符号相反, 果通过改变结构参数 使初级球差系数 1和高级球差系数 2符号相反,并具 有一定比例,使某带的初级球差和高级球差大小相等,符号相反, 有一定比例,使某带的初级球差和高级球差大小相等,符号相反,则该带的 球差为零。在实际设计光学系统时,常通过使初级球差与高级球差相补偿, 球差为零。在实际设计光学系统时,常通过使初级球差与高级球差相补偿, 将边缘带的球差校正到零, 将边缘带的球差校正到零,即
4 δ L'0 .707 = − A 2 h m / 4
球差曲线图
从上分析知球差与孔径密切相关, 越大, 越大 越大, 从上分析知球差与孔径密切相关,U 越大,δL‘越大, 所以球差必须校 正。 对于光学系统而言,透镜是最为基本的元件: 对于光学系统而言,透镜是最为基本的元件: 正透镜――产生负球差; 产生负球差; 正透镜 产生负球差 负透镜――产生正球差。 产生正球差。 负透镜 产生正球差 这是由透镜本身结构特性决定的,所以,单个透镜不能校正球差。但若 这是由透镜本身结构特性决定的,所以,单个透镜不能校正球差。 是正负透镜组合,就可以实现球差的校正。 是正负透镜组合,就可以实现球差的校正。 所谓的消球差一般只是能使某一孔径带的球差为0, 所谓的消球差一般只是能使某一孔径带的球差为 ,而不能使各个孔径 带全部为0,一般对边缘光孔径校正球差,而此时一般在有最大的剩余球差 带全部为 ,一般对边缘光孔径校正球差, 0.707,且值为边缘带高级球差-1/4。 ,且值为边缘带高级球差- / 。 3、单个折射球面得齐明点 、 对于单个折射球向面,有几个特殊的物点位置, 对于单个折射球向面,有几个特殊的物点位置,不管球面的曲率半径 如何,均不产生球差。 如何,均不产生球差。 (1) L=0,此时亦有 =0,β=1。即物点和像点均位于球面顶点时,不产 = ,此时亦有L‘= , = 。即物点和像点均位于球面顶点时, 生球差。 生球差。
应用光学课件第六章.
4 单个折射球面的无球差点
一般情况下,单个折射球面成像存在球差,但存在三个无球 差点,物体位于这三个点时,不产生球差。
经过推导,单个折射球面的球差分布系数可以写为:
1 2
S一
niLsinU (sin I sin I)(sin I sinU ) 2cos 1 (I U ) cos 1 (I U ) cos 1 (I I)
-U1
P
光线有不同的球差,因此必
P2
须计算不同孔径的光线。 ➢计算的起始数据为:
-Lz1 -L1
h1=Kh·h;U1=0; s➢in轴I1外=h点1/r1轴外点不同视场不同孔径的光线的起始数据:
U1 Kw w
L1
Lz1
Kh h tgU1
➢孔径取点系数Kh=0.25(0.3), 0.5, 0.707, 0.85, 1.0;
A、计算公式
sin I L r sinU r
sin I n sin I/n
U U I I
L r r sin I / sinU
➢过渡公式:
ni1 ni U i1 U i Yi1 Yi Li1 Li di
B、计算的起始数据
U1=0
P1
1) 物体在无穷远时
h
➢轴上点 轴上点不同孔径的
Di
Bt
Bs
Ui
A
P1
hi i
hi+1
o
P2
xi
xi+1
B
Di
ti1 ti-Di , s i1 si-Di
Di
hi -hi 1 s in U i
di-xi xi1 cosU i
hi ri sin U zi I zi
ri-xi 2 hi2 ri2
浅谈波前像差

浅谈波前像差很多网友在我的QQ上留言,想做近视手术,但是周围的一些朋友手术后白天视力很好,夜间却存在视觉质量问题,夜视力下降,不知道是什么原因导致。
他(她)们担心自己也会出现类似问题,在是否手术的问题上踌躇不前。
我的博客“日志分类”的“近视手术篇”里,曾经有很多博文讲述过产生这些情况的原因,以及解决的办法。
我的老博友们已经看过多次了,很多博友自己都能够说出个一二三来,希望新的博友们能够在我的博客中耐心地寻找一下,慢慢看,慢慢理解。
本文只对这个问题做一个简单的阐述。
眼球是一个光学成像系统,有近视、远视、散光的眼球不是一个完美的光学系统,外界景物的光线进入眼内后,在视网膜上的成像不能严格地再现物体的原貌,而是产生一些畸变,这种现象称为“像差”。
“像差”分为“色差”和“单色像差”。
其中,“单色像差”又可分为“球面像差、彗星像差、像场弯曲、像场畸变等。
眼睛作为一个光学系统,视网膜成像受“像差”的影响,表现为视力、视觉质量被限制,特别是暗环境下视力、视觉质量、黑白对比敏感度等功能下降。
国外眼科界在此方面的研究走在我们的前面,他们根据不同图形重建的多项式计算法,设计出了各种波前像差设备,并利用波前像差技术较为准确地测量眼球的高阶像差与低阶像差,结合计算机技术创建三维立体定量、直观、容易理解的眼球像差图。
眼球的像差分为6阶、27项,其中第1阶(倾斜)和第2阶(离焦、散光)为低阶像差,低阶像差可以通过普通的准分子激光LASIK手术矫正。
第3~6阶的像差(分别为彗星像差、球面像差、三叶草、二次球差等)为高阶像差,普通的LASIK手术不仅不能矫正高阶像差,还有可能使高阶像差比例增加。
这些残余与新增的高阶像差就会导致夜间视觉质量问题。
普通LASIK手术产生视觉质量问题的原因,可能与准分子激光切削的模式、光学区设定的大小、偏中心切削、中央岛、角膜瓣伤口的愈合反应、角膜表面不规则性散光、患者夜间瞳孔直径过大等等因素有关。
第十二章波像差
2 1 h2 2 0 2 1 h1 2 h2 1 h1 2
当物方在非无穷远时,h1/h2以具体情况而定;当物方在 无穷远时
h2 1 d1 h1
单薄透镜的初级倍率色差
经推导得:
倍率色差的影响
C II hhp
L' A1 h A2 h
2
4
当
h l1 , u ' f'
2 n' hm W 2 2f '
0
h 2 L' d ( ) hm
当对边光校正球差时,0.707带光有最大剩余球差。
若离焦,使图中三部分面积相同,则应轴向离焦
3 ' L0.707 4
此时
W
2 n 'hm
2f
BC F BD BC BF
A
-y B
P
P AD0
消色差系统只能对二种色光校正位置色差,它 们的公共焦点或像点相对于中间色光的焦点或 像点仍有偏离.这种偏离称为二级光谱
§12-1波像差及其与几何像差的关系(Wave Aberration)
1、物理意义 ★理想的出射波:球面波 ★实际的出射波偏离球面波
移动接收面,以接收面为基准,则球差将改变, 波像差曲线随之改变——称之为离焦 。
不离焦时,高斯面上
1 ' Lm 离焦 2
Wmax
n' '2 L' u m 4
偌达不到瑞利判据,
Wmax
1 n' n' '2 '2 L' u m L' u m 4 4 16
波象差的具体内容

§ 10-1 波像差及其与几何像差的关系光线——波面的法线波像差——实际波面对理想波面的偏离轴上点 A 以单色光成像存在球差,A'M 交理想波面于 M,即为波差。
(以理想波面为基准,右负左正)一、轴上点的波像差及其与球差的关系[返回本章要点]球差相当的波像差为以 u'2 为纵坐标,以 δL'为横坐标的球差曲 线与纵轴所围面积的一半 【推导】当物方无穷远时,u’=h/f’讨论 1.当仅有初级量时 以波长为单位时,边缘处波像差最大。
移动接收面,以接收 面为基准,则球差将改变,波像差曲线随之改变。
称之为离焦离焦,[返回本章要点]2. 当有初级和二级球差时当,当对边光校正球差时,0.707 带光有最大剩余球差若离焦,使图中三部分面积相同,则应轴向离焦,此时3. 若再有三级以上球差,则像差平衡的原则是: 尽可能离焦后有多个大小相等、符号相反的小面积 以下动画是一个实际光学系统成像质量随离焦量变化的情况[返回本章要点]二、轴外点的波像差及其与垂轴像差的关系[返回本章要点]轴外任意一点的像差,可以用 两个分量表示波差 W 应表示成与这两个分量之间的关系可导出推 沿子午截线的波像差 导曲线对 sinU'轴所围的面积表征波像差的大小。
参考点为高斯像点. 但高斯像点亦不一定是最佳参考点 离焦垂轴离焦:对各条光线 δy'均改变同样值。
->坐标平移 离焦 沿轴离焦:纵轴转一角度,以形成尽可能相等的大小相同、符号相反的小 面积注意 1. 垂轴离焦只为评价像质,轴向离焦才为确定最佳像面位置。
2.[返回本章要点]沿轴离焦只能对某一视场而言,不同的视场有不同的沿轴离焦要求,不能同时满足。
应寻求最佳平3. 轴向离焦中与也不能同时满足。
衡§ 10-2 波像差的一般表示式[返回本章要点]波面——等光程面,等光程面的变形——波像差。
光学系统的物方光线由 y,η,ζ 决定,像方光线由 y',η',ζ’决定 考虑 光学系统是旋转对称光束关于子午面对称当 y=0 时为轴上点 所以 波差的 一般表 达式式中第一行为轴向离焦与垂轴离焦项,第二行为初级单色像差引起的波像差,第三行为二级单色像差 引起的波像差。
波前像差简介
常识综述从人类视网膜感光细胞的密度推算出人眼的极限视力可达3.0甚至更高,但由于人类进化过程中对远视力的需要逐渐下降,以及角膜和晶状体等器官的光学性能退化等原因,导致出现各种像差,因此人眼的理想视力只有1.5或更差,并且这些像差不能被现有的眼镜和隐形眼镜矫正。
波阵面像差(波前像差)原本是一项天文学技术,其发展由来已久,主要用来纠正天文望远镜等的像差,以便能更清晰地观测到更远距离的天体。
像差理论做为研究非理想光学系统的基础早已广泛地应用于制造光学精密仪器,当波前像差技术应用于眼科后,才与我们的生活变得更加关系密切。
目前波前像差仪有很多种,可分为客观法和主观法两类。
客观法根据其设计原理,又可分为:出射型像差仪、视网膜像型像差仪和入射可调式屈光计三种类型;主观法即心理物理学检查方法。
客观法的优点是快速、可重复性及可靠性好,但需使用较亮的照明光线,大部分还需要散瞳;主观法无需散瞳,可在眼睛存在调节的状态下检查眼的像差,但需对患者进行训练,检查较慢,可重复性较客观法差。
无论是主观法还是客观法像差仪,其基本原理是一样的,即选择性地监测通过瞳孔的部分光线,将其与无像差的理想光线进行比较,通过数学函数将像差以量化形式表达出来。
下面根据其设计原理来逐一介绍。
一、客观式像差仪1基于Schack-Hartmann眼球,穿过一透镜组,聚焦在一个CCD图像。
WASCA像差分析仪(Zeiss公司),Zywave2图即,像差分析仪(Wavelight公司)和视网膜光线追踪仪(Tracy公司)等。
3瞳孔的快速裂隙扫描而实现,眼底反光被CCD捕捉从而得到眼的波阵面像差。
基于此原理的像差仪包括Emory 视觉矫正系统和OPD扫描系统(Nidek公司)等。
图6-3基于Smirnov-Scheiner原理的像差测量示意图二、主观式像差仪根据光路追踪原理设计,利用空间分辨折射仪以心理物理方法测量人眼像差。
假设眼处于衍射的极限时,聚焦在无穷远,因而无穷远的点光源通过瞳孔不同区域进入眼内,将会聚焦在视网膜上的一点。
像差简介

S ,
I 1
k
S I luni(i i )(i u ) S II luniz (i i )(i u ) S I S III S II iz i SI ( z )2 i i ( n n) nnr iz i iz i
S II ,
1 k 1
k
第二讲
像差简介
四、像差曲线
第二讲
像差简介
四、像差曲线
第二讲
像差简介
五、计算光路选择
1、理想像点、像面 2、理想像高 3、实际轴上像点 4、子午面内实际轴外像点 5、弧矢面内实际轴外像点
6、其他空间光线
第二讲
像差简介
第二讲
像差简介
像差介绍——球差
第二讲
像差简介
像差介绍——球差
第二讲
像差简介
SIII luni(i i' )(i'u)(iz / i) SI (iz (n'n) / nn' r SI (iz / i)
2
2
SV (SIII SIV )(iz / i)
第二讲
像差简介
三、像差介绍——分布系数
CI luni(n' / n'n / n) CII luniz (n' / n'n / n) CI (iz / i)
像差介绍——非球面
第二讲
像差简介
像差介绍——非球面
第二讲
像差简介
像差介绍——非球面
第二讲
像差简介
像差介绍——非球面
第二讲
像差简介
像差介绍——非球面
第二讲
像差简介
像差介绍——多透镜校正
第二讲
第七章 像差

子午像差 子午彗差 细光束子午场曲 宽光束子午场曲 轴外子午球差
了解整个子午光束的结构,需选取不同孔径高的若干个 子午光线对 了解整个像平面的成像质量,需选取不同像高轴外点的 像差
弧矢像差 弧矢彗差 细光束弧矢场曲 宽光束弧矢场曲 轴外弧矢球差
实际光学系统中,五类像差一般同时存在
第七章 光学系统的像质评价和像 差
成像性能的要求分为两类
• 光学特性 • 成像质量
成像质量的评价方法分为两类
• 光学系统实际制造完成以后,星点法、分辨率 • 设计阶段:几何像差、 波像差
星点检验
检验时使用带有微孔的星点板,一般用眼睛直接观 察星点板的星点像,对于显微物镜等小像差系统主 要看看星点像的大小和形状
子午彗差、宽光束子午场曲、细光束子午场曲 轴外子午球差
弧矢彗差、宽光束弧矢场曲、细光束弧矢场曲 轴外弧矢球差
对于小孔径光束成像的光学系统,子午和弧矢宽光束像 差(彗差和轴外球差)不起显著作用。它在理想像平面 上的成像质量由细光束子午xt’和弧矢场曲xs’ 决定
细光束子午场曲和弧矢场曲之差称为像散
tan U
=U
+U3
+
2U 5 ......
3 15
三 像差类别
波像差
实际波面与理想波面之间的光程差异,常用来评价 光学系统的成像质量,是几何像差的综合体现。
尤其对于小像差系统,波像差更能反映像质。
λ
评价像质标准——瑞利判据:当系统最大波像差< 4 , 成像是完善的
四 像差谱线的选择
计算和校正像差谱线的选择主要取决于接收器 的光谱接收特性。
负彗差:彗星尾巴朝向光轴
第五章像差-精品

2019/8/16
50
(2)倍率色差(垂轴色差)
光学材料对不同色光的折射率不同,对于 光学系统对不同色光就有不同的焦距
x'
f'
不同色光的焦距不等时,其 放大率也不等
就有不同的像高,这就是倍率色差
2019/8/16
51
A B
A B
2019/8/16
BC’
BD’
yzc’
y BF’
zD’
yzF’
光斑的头部(尖端)较亮,至 尾部亮度逐渐减弱,称为彗星 像差,简称彗差
C E
A
O
B
2019/8/16
F D
By’ Ay’
19
彗差的形状有两种:
彗星像斑的尖端指向视场中心的称为正彗差 彗星像斑的尖端指向视场边缘的称为负彗差
由于彗差没有对称轴只能垂直度量,所以它 是垂轴像差的一种
彗差对成像的影响: 像的清晰度,使成像的质量降低
BF’
BD’
BC’
yzF’
yzD’
yzc’
52
上图的叠加结果使像的边缘呈现彩色 光学系统的倍率色差是以两种色光的主光 线在高斯像面上的交点高度之差来度量的
y'FC y'ZF y'ZC
影响成像清晰度
2019/8/16
53
无畸变 2019/8/16
正畸变
负畸变 39
视场的畸变用符号q表示
q 100%
式中 实际放大率理想放大率
实际放大率可以用实际主光线与高斯像面的交点
高度yz’与物高y之比表示
q yz'y' 100% y'
y’为理想像高
2019/8/16
2016-09-27 第5-6次课 波像差概述

理想光学系统轴上点成像
有限远共轭
无限远共轭
波像差-坐标系建立
光瞳面 像面
在光瞳面 评价像差
注意坐标轴的选取
12
理想球波面表示
球心坐标: 球面方程:
x x0 y y0 z z0 R
x 2 y 2 ( z R) 2 R 2
z
2 2 参考球面分布: W ( x, y) x y R 2R
子午彗差
轴外点 宽光束 辅轴上的球差
上下光线经球面折射,失去了对主光线的对称性。 彗差是与视场、孔径相关的垂轴像差。 对于靠近光轴的轴外物点,仅受彗差、球差的影响,如显微物镜成像。 阿贝正弦条件
5
弧矢彗差
弧矢面内对称于主光线的一对光线经球面折射之后仍 然对称于子午面,且相交于子午面。
彗差
1.2.3 像散
缩小光瞳,无限细轴外光束,没有球差、彗差 子午光束经球面折射会聚于主光线上的子午像点 弧矢光束经球面折射会聚于主光线上的弧矢像点 两像点不重合,称为像散
6
像散
人眼的散光 简单判断方法
子午像散与弧矢像散
注意:主光线 入瞳
A
c1
d1 b1 a1 c0 d0 b0 a0
费马原理
光线从空间任意一点A到另一点B,不论所 经过的介质情况如何,总是沿着光程为稳定 值的一条路径进行。
迟泽英,陈文建。《应用光学与光学设计基础(第二版)》, 高等教育出版社,2013,p19
波像差一般表达式的导出
光学系统旋转对称
2 W ( x, y, x0 ) W ( x, y, x0 ) 只存在偶次元 x2 , y 2 , x0 , xy, xx0 , yx0
波前像差原理及应用课件
Mean = 1.26 + 0.99 s.d.
10
5
发生频率
0
20
Myopic Children
15
N = 174
Mean = 1.16 + 0.55 s.d.
10
5
0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
学习交流PPT 波前像差均方根值(um)
Wavefront Aberration 3 2 1 0 -1 -2 -3
-3 -2 -1 0 1 2 3 mm (right-left)
2 Dimensional View
学习交流PPT
33
2nd 3rd
Zernike Modes
Z -22
astigmatism
Z
0 2
Z
2 2
defocus
astigmatism
secondary astigmatism
Z
4 4
quadrafoil
5th
Z
-5 5
Z
-3 5
Z
-1 5
Z
1 5
Z
3 5
Z
5 5
pentafoil
secondary trefoil
secondary
secondary
coma学习交流PPT coma
secondary trefoil
pentafoil
学习交流PPT
28
Zernike多项式
学习交流PPT
29
Zernike多项式可表示成以n为行数,m为列数的金字塔
Zn m –7 -6 –5 0
1
光学设计第11章 波像差

第十一章 波像差前面对像差的讨论是以几何光学为基础的,用光线经过光学系统的实际光路相对于理想光路的偏离来度量的,统称为几何光学。
但光线本身是一抽象的概念,用它的密集程度来评价像质,在很多场合下与实际情况并不符合,而且像差也不可能校正为零。
因此,必须考虑像差的最佳校正方案和像差的容限问题,它与系统的使用要求和使用状况有关。
这些像质评价问题常须基于光的波动本质才能解决。
几何光学中的光线相当于波动光学中波阵面的法线,因此,物点发出的同心光束与球面波对应。
此球面波经过光学系统后,改变了曲率。
如果光学系统是理想的,则形成一个新的球面波,其球心即为物点的理想像点(实际上,由于受系统有限孔径的衍射,即使是理想系统也不可能对物点形成点像)。
但是,实际的光学系统的像差将使出射波面或多或少地变了形,不再为理想的球面波。
这一变了形的实际波面相对于理想球面波的偏离,就是波像差。
波像差与像质评价问题密切相关。
例如要计算斯特列尔强度比(即中心点亮度)和光学传递函数时,就必须求知波像差,而瑞利判断更是直接以波像差的大小来作评价标准的。
加之波像差与几何像差之间有内在联系,利用这种联系,可在一定程度上解决像差的最佳校正问题和容限问题。
§1. 轴上点的波像差对于轴对称光学系统,轴上点发出的球面波经系统以后,只是由于唯一的球差,使出射波面变形而偏离于球面。
由于轴上点波面是轴对称的,其波像差只需从波面与子午平面相截的截线上,取光轴以上的一方来考察即可。
图11-1 轴上点的波像差如图11-1所示,//Z P 是波面的对称轴(即系统的光轴),/P 是系统的出射光瞳中心。
以实际光线与光轴//Z P 的交点/A 为圆心,以r P A =//为半径做圆(实际为球面),即为实际波面。
过/A 点做与光轴成像方孔径角/U 的直线,就是实际光线,设实际光线与实际波面相交于M 点,则r M A =/。
选择光轴上的一点为参考点,例如高斯像点/A ,那么//A A 即为像方孔径角为/U 时的球差:///A A LA =。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
理想光学系统轴上点成像
有限远共轭
无限远共轭
波像差-坐标系建立
光瞳面 像面
在光瞳面 评价像差
注意坐标轴的选取
12
理想球波面表示
球心坐标: 球面方程:
x x0 y y0 z z0 R
x 2 y 2 ( z R) 2 R 2
z
2 2 参考球面分布: W ( x, y) x y R 2R
参考球面方程:
WR ( x, y )
W ( x, y ) W ( x, y ) WR ( x, y )
z x2 y 2 2R2
出瞳边缘的波差
Wdefocus z sin 2 U
注意:波像差都是在出瞳面上表示的。始终以参考球面的曲率半径为 R
1 2
Fizeau干涉仪测量
9
畸变产生原因
畸变产生原因在于主光线的球差随视场角而改变,Bz为轴上光线,因 为球差存在,近轴像点B’与实际光线B’z并不重合。由于球差随孔径改变, 相当于在一对共轭的物象平面上,放大率随视场而变化,不再是常数,从 而造成畸变。 图中,z为轴上点,其近轴像点位于z’,实际像点位于z”。
1.2.6 色差
i'
n i n'
光线追迹 已知:U、L 求:U’、L’ 几何画板演示
u ' u i i'
i' l' r r u'
近轴光学vs三级像差
1.2 各种像差简介
初级像差
单色像差:球差、彗差、像散、场曲、畸变
色差:位置色差、倍率色差
3
1.2.1 球差
高斯像面
U'
A
-U
L' -l l'
测试出瞳面上的干涉条纹
调焦清晰
离焦
13
参考点轴向离焦
接收面并不总在高斯像面 波前分布:
W ( x, y ) x2 y 2 x2 y 2 x2 y 2 1 x2 y 2 z 2( R z ) 2 R 1 z / R 2R 2R2
x2 y 2 2R
2 W ( x, y, x0 ) W ( x 2 y 2 , xx0 , x0 ) 2 a1 ( x 2 y 2 ) a2 xx0 a3 x0 2 b1 ( x 2 y 2 ) 2 b2 xx0 ( x 2 y 2 ) b3 x 2 x0 2 3 4 b4 x0 ( x 2 y 2 ) b5 xx0 b6 x0
彗差
1.2.3 像散
缩小光瞳,无限细轴外光束,没有球差、彗差 子午光束经球面折射会聚于主光线上的子午像点 弧矢光束经球面折射会聚于主光线上的弧矢像点 两像点不重合,称为像散
6
像散
人眼的散光 简单判断方法
子午像散与弧矢像散
注意:主光线 入瞳
A
c1
d1 b1 a1 c0 d0 b0 a0
b1 a1 b2 a2 b3 a3 c3 F'2 F'2 F'1 F'1 F'1 c2 c1
F'2
• 像散波面在两个主截面 内有不同的曲率 • 微分几何理论可以解释
• 参见:杜德罗夫斯基,《光学仪 器理论》上
Zemax示例球差
几何像差在像面评价 平凸透镜、凸平透镜的球差有何区别? 球差评价曲线、图像演示:Ray、Opd、Spt、MTF 球差与孔径的关系、球差与像面位置的关系
x2 y 2 2R
W ( x, y )
x2 y 2 2R
波像差:
W W ( x, y) WR ( x, y) 0
注意:以光瞳中心为坐标原点,在光瞳面评价波像差,此时为零
为什么测量出瞳面的波像差?
D.Malacara, Ed. Optical shop testing 3rd Edition. John Wiley and sons, New York. 2007
3 y x 2 (偶次元) ,yx (奇次元)
例如
光束对称于子午面,y改变符号时,波像差不变。
W ( x, y, x0 ) W ( x, y, x0 ) 去掉
2 xy , yx0 留下 x 2 , y 2 , x0 , xx0
对于轴上点,波像差只是孔径的函数
W ( x, y,0) f ( x 2 y 2 )
B'1 1 2 1 A -U 2 L'2 B A'1 A'2 L' 1 2 B'2 Y'2
Y'1
L' 1
1.3 初级像差多项式
10
小结
几 何 像 差
单色像差:球差、彗差、像散、场曲、畸变
色差:位置色差、倍率色差
关键:几何像差在像面用点、线偏差评价
2 波像差
2.1 波像差 2.2 像差多项式
试件轴向离焦
齐焦
轴向离焦
14
理想光学系统轴外点成像
有限远共轭
无限远共轭
被测波面横向离焦
被测球波面方程
y 2 ( x x ) 2 ( z R) 2 R 2
W ( x, y ) x2 y 2 x x 2R R
WR ( x, y ) 参考球面方程:
x2 y 2 2R
物方蓝色圆弧 B应理想成像于像方蓝色圆弧 B’,当物点 B向 B1移动时, 像点B’向B’1移动,即物方红色直线AB1应理想成像于像方红色弧线A’B’1, 亦即无像差系统将物方平面理想成像为曲面。根据高斯光学,物方平面在 像方也应成像为理想平面像,由此产生的像差即为场曲。
1.2.5 畸变
垂轴放大率与视场有关,不是常数。 枕形畸变,桶形畸变
x 2,y 2 只能以 x 2 y 2 形式存在
2 W ( x, y, x0 ) W ( x 2 y 2 , xx0 , x0 )
基元
2 x 2 y 2 , xx0 , x0
参考,张以谟《应用光学(上)》,机械工业出版社,1982,p287-289
17
2.2.1 波差多项式(直角坐标)
总之,当轴向、横向离焦均存在时, 被测球面波 波像差
W ( x, y) x2 y 2 x2 y 2 x y z x y 2R 2R2 R R x2 y 2 x y x y 2R2 R R
W ( x, y) z
试件垂轴离焦
齐焦
垂轴离焦
15
理想光学系统的波像差
波像差为零:探测面与高斯像面重合 波像差的产生:探测面与高斯像面有相对位移
因为参考面发生了轴向或垂轴移动,对应实际情况,胶 片或CCD靶面产生平移(轴向、垂轴) 也可以等效地看成理想像点产生轴向或垂轴移动,对应 于物点产生平移(轴向、垂轴) 此时探测面上不再是一个像点,而是一个圆形光斑。
折射面
B
轴上点: 光线与球面同时接触于a0、b0、c0、d0未失去对称性 轴外点: 对于子午光线,到达折射面的先后顺序:az c 对于弧矢光线,z线接触球面,b、d同时接触球面 子午面与弧矢面在折射球面上的截线曲率不等,所以子午像点与弧矢 像点不重合。
细光束像散的计算
主光线
7
像散波面
波像差概述
南京理工大学 陈磊 2016年09月27日 2016年09月30日
参考文献
1. 胡玉禧,安连生. 应用光学. 中国科技大学出版社,2000 J.C.Wyant. Basic Wavefront Aberration Theory for Optical Metrology. APPLIED OPTICS AND OPTICAL ENGINEERING, VOL. Xl W.T.威尔福特. 对称光学系统的像差. 科学出版社,1982.7 久保田 广. 波动光学. 科学出版社,1983,§11,§21,§22 张以谟. 应用光学(第3版).电子工业出版社,2008,第9、10章 徐金镛, 孙培家. 光学设计. 北京:国防工业出版社,1989 R. Ditteon. 现代几何光学. 长沙:湖南大学出版社,2004 潘君骅, 陈进榜. 计量测试技术手册 第10卷 光学. 中国计量出版社, 1997,第13章 杨志文. 光学测量. 北京理工大学出版社,1996 [美]W.J.Smith. 周海宪 程云芳译。 现代光学工程(第四版).化学 工业出版社,2011 林晓阳. Zemax光学设计超级学习手册. 人民邮电出版社,2014 Zemax User’s Manuel J.M.Geary. Introduction to Lens Design with Practical ZEMAX Examples.
-L'
轴上点,与孔径有关,弥散圆尺寸表征球差的大小
球差
最小弥散圆位于近轴像点距边缘像点3/4处
Zemax示例球差
R1=100,d=10,BK7, 口径D=50mm,F/#=1.5
-T'
4
非球面消除球差
1.2.2 子午面与弧矢面(对于轴外光线)
主光线
入瞳 轴上点:子午面与弧矢面光线分布一样 轴外点:弧矢光线对称于子午面,子午面内光线光束的对 称性被破坏。
2.1 波像差
什么是波像差? 像差多项式 Seidel多项式 Zernike多项式
11
波像差
波像差
W ( x, y) WA ( x, y) WR ( x, y)
WA = Aberrated wavefront WR = Reference wavefront
波像差的意义:沟通几何光学与波动光学的桥梁。 作用:1)像质评价指标,如Strehl值、瑞利判据、分辨率、光学传 递函数等,不能仅由几何像差描述;2)像差容限