《机器人结构设计》PPT课件
合集下载
机器人的组成结构(PPT52页)
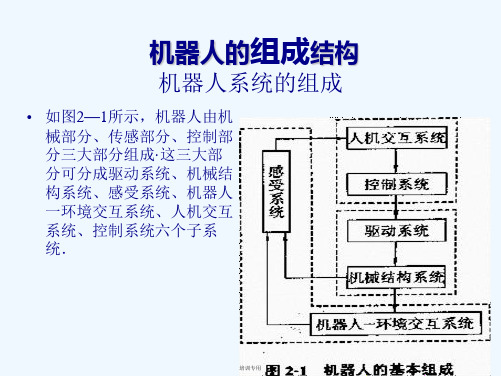
• 感受系统 它由内部传感器模块和外部传感器模块组成,获 取内部和外部环境状态中有意义的信息.智能传感器的使 用提高了机器人的机动性、适应性和智能化的水准.人类 的感受系统对感知外部世界信息是极其灵巧的,然而,对 于一些特殊的信息,传感器比人类的感受系统更有效.
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
《机器人结构设计》课件

螺丝连接
适用于各种材料的连接,拆卸 方便,但连接强度较低。
粘接
适用于塑料、玻璃等材料的连 接,操作简便,但耐久性较差
。
扣件连接
适用于各种材料的连接,连接 强度较高,拆卸方便。
驱动系统设计
01
02
03
电动机驱动
利用电动机产生的扭矩或 直线推力驱动机器人运动 。
液压驱动
利用液压油产生的压力驱 动机器人运动,具有较大 的推力。
详细描述
可变形机器人通过先进的材料、驱动系统和控制算法,实现 自主变形和适应环境变化的能力。这种机器人可以在复杂环 境中执行任务,如搜救、探测和军事行动等。
微型机器人
总结词
微型机器人是指尺寸微小的机器人, 具有高度的机动性和灵活性。
详细描述
微型机器人在微纳操作、医疗、环保 等领域具有广泛的应用前景。通过精 密制造和智能控制技术,微型机器人 可以实现复杂的运动和操作功能,如 细胞操作、药物输送等。
02
足式机器人由腿部、关节、电机、控制器和身体等部分组成,
可以通过调节电机的输出实现机器人的步态控制。
足式机器人在人机交互、影视特效、反恐等领域有广泛应用。
03
飞行机器人
飞行机器人是一种能够在空中飞行的 机器人,具有高度的机动性和灵活性 。
飞行机器人在航拍、侦查、搜救等领 域有广泛应用。
飞行机器人通常由机翼、电机、控制 器和机身等部分组成,通过调节电机 的输出实现机器人的升降、俯仰、偏 航等动作。
环境中能够正常运行。
工业机器人
工业机器人是一种用于工业生产 的机器人,如焊接机器人、装配
机器人等。
工业机器人的结构设计需要考虑 机器人的负载能力、精度、稳定
机器人课程PPT课件

•
医疗方面发挥作用。
43
微型飞行器:被认为是未来战场上的重要侦察和攻击武器,能以可接受的成本执行某一有价值的任务。这种飞行器必须能够传输实时图像或执行其它功能,有足够小的尺寸(小于20厘米)、足够的巡航范围(如不小于5公里)和飞行时间(不小于15分钟)。
微型战术无人机:可用于战争危险估计、目标搜索、通信中继,监测化学、核或 生物武器,侦察建筑物内部情况。可适 用于城市、丛林等多种战争环境。因为 其便于携带,操作简单,安全性好的优
62
•
应用领域的进一步扩大
机器人在制造业中的发展是成功的,正逐步涉足非制造业。随着人类改造大自然要求的提高,以及机器人适应特殊环境能力的增强,农业、林 业、军事、海洋勘探、太空探索、生物医学工程 等行业将是机器人崭露头角的新领域。深入日常生活在人们的日常生活中,各种服务机器人也将向我们走来,娱乐机器人将给我们的生活增添无限乐趣。清洁机器人将减轻我们繁重的家务。保健机器人可为老人和残疾人提供保健帮助,是人
10
即分为示教-存储-再现-操作四
•
示教-再现步进行。
示教:方式有两种:(1) 直接示教-手把手;(2) 间接示教-示教盒控制。存储:保存示教信息。再现:根据需要,读出存储的示教信息向机器人发出重复动作的命令。
7.12.13 控制
顺序信息:各种动作单元(包括机械手和外围设备)按动作先后顺序的设定、检测等。位置信息:作业之间各点的坐标值,包括手爪在该点上的姿态,通常总称为位姿( POSE)。时间信息:各顺序动作所需时间,即机器人完成各个动作的速度。
•
执4 行机构:机器人的足、腿、手、臂、腰及关节等,它是机器人运动和完成某项任务所必不可少的组成部分。
5 控制器:是机器人的核心,它负责对机器人的运动和各种动作控制及对环境的识别。现代工业机器人的控制器都是由计算机控制系统组成,控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。
机器人手部结构详解PPT课件

机器人手部结构
主讲 周兰
1
引言:
工业机器人的手部也叫末端操作器, 它直接装在工业机器人的手腕上用于 夹持工件或让工具按照规定的程序完 成指定的工作。
2
一、手部的特点
3
1.手部与手腕相连处可拆卸:
手部与手腕处有可拆卸的机械接口: 根据夹持对象的不同,手部结构会有 差异,通常一个机器人配有多个手部 装置或工具,因此要求手部与手腕处 的接头具有通用性和互换性。
33
4.自适应吸盘:
结构特点:
该吸盘具有一个 球关节,使吸盘 能倾斜自如,适 应工件表面倾角 的变化。
34
5.异形吸盘:
结构特点:
可用来吸附鸡蛋、 锥颈瓶等物件。 扩大了真空吸盘 在机器人上的应 用。
35
6.喷气式吸盘:
工作原理:
压缩空气进入喷嘴后,利用伯努利效应,当压缩 空气刚进入时,由于喷嘴口逐渐缩小,致使气流 速度逐渐增加。当管路截面收缩到最小处时,气 流速度达到临界速度,然后喷嘴管路的截面逐渐 增加,使与橡胶皮碗相连的吸气口处,造成很高 的气流速度而形成负压。
手部可能还有一些电、气、液的接口: 由于手部的驱动方式不同造成。对这 些部件的接口一定要求具有互换性。
4
2.手部是末端操作器:
可以具有手指,也可以不具有手指; 可以有手爪,也可以是专用工具。
5
末端操作器图例(1):
每个手指有三个或 四个关节。技术关 键是手指之间的协 调控制。
6
末端操作器图例(2):
工件必须有可靠的定位,保持工件和手爪之间的准 确的相对位置关系,以保持机器人后续作业的准确 性。 握住:确保工件在搬运过程中或零件装配过程中定 义了的位置和姿态的准确性。 释放:在指定位置结束手部和工件之间的约束关系。
主讲 周兰
1
引言:
工业机器人的手部也叫末端操作器, 它直接装在工业机器人的手腕上用于 夹持工件或让工具按照规定的程序完 成指定的工作。
2
一、手部的特点
3
1.手部与手腕相连处可拆卸:
手部与手腕处有可拆卸的机械接口: 根据夹持对象的不同,手部结构会有 差异,通常一个机器人配有多个手部 装置或工具,因此要求手部与手腕处 的接头具有通用性和互换性。
33
4.自适应吸盘:
结构特点:
该吸盘具有一个 球关节,使吸盘 能倾斜自如,适 应工件表面倾角 的变化。
34
5.异形吸盘:
结构特点:
可用来吸附鸡蛋、 锥颈瓶等物件。 扩大了真空吸盘 在机器人上的应 用。
35
6.喷气式吸盘:
工作原理:
压缩空气进入喷嘴后,利用伯努利效应,当压缩 空气刚进入时,由于喷嘴口逐渐缩小,致使气流 速度逐渐增加。当管路截面收缩到最小处时,气 流速度达到临界速度,然后喷嘴管路的截面逐渐 增加,使与橡胶皮碗相连的吸气口处,造成很高 的气流速度而形成负压。
手部可能还有一些电、气、液的接口: 由于手部的驱动方式不同造成。对这 些部件的接口一定要求具有互换性。
4
2.手部是末端操作器:
可以具有手指,也可以不具有手指; 可以有手爪,也可以是专用工具。
5
末端操作器图例(1):
每个手指有三个或 四个关节。技术关 键是手指之间的协 调控制。
6
末端操作器图例(2):
工件必须有可靠的定位,保持工件和手爪之间的准 确的相对位置关系,以保持机器人后续作业的准确 性。 握住:确保工件在搬运过程中或零件装配过程中定 义了的位置和姿态的准确性。 释放:在指定位置结束手部和工件之间的约束关系。
2024年度-机器人教学课件(共26张PPT)pptx

介绍了机器人常用传感器类型、 工作原理及在机器人感知中的应 用。
机器人自主导航与定位
阐述了机器人自主导航的基本原 理、定位方法及SLAM技术。
机器人基本概念与分类
机器人操作系统与编程
介绍了机器人的定义、发展历程 、分类及应用领域。
介绍了ROS的基本概念、功能特 点、常用命令及编程实践。
32
学生自我评价报告分享
第三代机器人
智能型机器人,具备自主 学习和决策能力,能够适 应复杂环境和任务。
5
未来趋势展望
人机协作
随着人工智能技术的发展,未来 机器人将更加注重与人类的协作 ,共同完成任务。
应用领域拓展
随着技术进步和应用需求增加, 机器人将在更多领域得到应用, 如医疗、教育、娱乐等。
自主化
机器人将具备更高的自主性和智 能化水平,能够独立完成复杂任 务。
以促进课程的不断完善和提高。
33
下一步学习计划和资源推荐
深入学习机器人相关领域知识
鼓励学生继续深入学习机器人相关领域知识,如机器视觉、深度学习在机器人中的应用等 。
参加机器人竞赛和项目实践
推荐学生参加各类机器人竞赛和项目实践,锻炼自己的实践能力和团队协作能力。
利用在线资源进行自主学习
推荐学生利用MOOCs、在线实验室等资源进行自主学习和实践操作,提高自己的学习效 果和兴趣。
01
学习成果展示
通过课程学习,学生能够掌握机器人基本概念、运动学与控制、传感器
与感知、自主导航与定位等关键知识点,并具备一定的实践操作能力。
02
学习方法分享
学生可以采用多种学习方法,如课前预习、课后复习、小组讨论、实践
操作等,以提高学习效果和兴趣。
《RHex系列机器人》课件

应用前景
RHex机器人在未来将被广泛应用于更多领域, 如探险、救援和智能制造等。
结束语
本课件综合介绍了RHex系列机器人的概述、结构、控制系统、功能以及发展与应用前景。RHex机器人拥有巨 大的潜力,将在未来的科技发展中发挥重要作用。
应用领域
RHex机器人被广泛应用于军事、探险、救援和工业领域,如搜救任务、环境研究和危险物 品处理。
二、RHex机器人的结构
体型及组成
RHex机器人采用先进的设计结构,包括机身、多足 驱动系统和传感器组件。
运动机理
RHex机器人通过其独特的运动机理,实现了高效的 越障、爬坡和行走能力。
三、RHex机器人的控制系统
攀爬
RHex机器人具备出色的攀爬能力,能够克服各种垂直和倾斜的表面,实现高度 自由的运动。
3
通信
RHex机器人配备先进的通信系统,能够实现与其他机器人和操作者的无线通信 和协作。
五、RHex机器人的发展与应用前景
历史发展
RHex系列机器人经过多年的研发和改进,已经 取得了显著的技术突破和应用成果。
1 传感器
RHex机器人配备了先进的传感器系统,包括摄像头、激光雷达和惯性测量单元,用于环 境感知和定位。
2 控制方法
RHex机器人采用智能控制算法,结合传感器反馈,实现精确的运动控制和任务执行。
四、RHex机器人的功能
1
行走
RHex机器人通过其多足驱动系统,在各种地形上实现稳定的行走和机动性。
2
《RHex系列机器人》PPT 课件
RHex系列机器人是一种领先的机器人技术,具有出色的机动性和多样化的应 用领域。本课件将详细介绍RHex机器人的概述、结构、控制系统、功能以及 发展与应用前景。
工业机器人结构设计ppt课件

2.2.1 钳爪式手部的设计
四、钳爪式手部结构及其夹紧力的计算公式举例
N
N
P
N=P/2 注:①两手指平移 ②增力比(N/P)小
齿轮齿条式手部结构
No.32
2.2.1 钳爪式手部的设计
四、钳爪式手部结构及其夹紧力的计算公式举例
α
γB A β
P
C
EN
N
N=PLcos(α+β+γ)/(2lsinαcosβ)
2、开式连杆系中的每根连杆都 具有独立的驱动器,属于主动连 杆系,连杆的运动各自独立,不 同连杆的运动之间没有依从关系, 运动灵活。
No.5
2.1 机器人本体的基本结构
二、机器人本体基本结构特点:
3、连杆驱动扭矩的顺态过程在 时域中的变化非常复杂,且和执 行器反馈信号有关。连杆的驱动 属于伺服控制型,因而对机械传 动系统的刚度、间隙和运动精度 都有较高的要求。
应根据被抓取工件的要求确定吸盘的形 状。由于气吸式手部多吸附薄片状的工 件,故可用耐油橡胶压制不同尺寸的盘 状吸头。
No.41
2.2.2 吸附式手部的设计
三、气吸式手部的吸力计算
吸盘吸力的大小主要取决于真空度(或 负压的大小)与吸附面积的大小。
真空吸盘吸力F计算公式:
F nD2 ( H )
4K1K2K3 76
注:①AB=DE,DB=AE,L=BC杆长,l=AB杆长; ②两手指保持平行;③当α角较小时,可获得较大的力比。
平行连杆杠杆式手部结构
No.33
2.2.1 钳爪式手部的设计
四、钳爪式手部结构及其夹紧力的计算公式举例
P
φ
α
c
bN
N
N=Pcsin(α+φ)/2bsinαsinφ
工业机器人技术-工业机器人机械结构ppt课件

上臂
☞ 见P61、图3.3-10
电机
减速器 上臂
下臂
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
❖ 大型机器人结构1
☞ S轴采用同步皮带传动、手腕电机后置(后驱)
目的:
✓ 减小S轴电机; ✓ 平衡上臂重力; ✓ 提高结构稳定性。
☞ 见P43、图3.1-11, P45、图3.1-13
B/T电机位置 上臂回转
B/T电机位置
腕部回转
前驱
后驱
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
前驱特点 ✓ 结构简单、外形紧凑; ✓ 传动链短、传动精度高; ✓ 电机规格受限,承载能力低,适合小型机器人; ✓ 电机安装空间小、散热差,维修困难; ✓ 上臂前端重量大、重心远,结构稳定性差。
减速器
手腕电机
S轴电机 同步皮带
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
❖ 大型机器人结构2
☞ S轴采用同步皮带传动、上臂连杆驱动
目的:
✓ 减小S、U轴电机; ✓ 降低机器人重心; ✓ 提高结构稳定性。
❖ 典型结构剖析1(前驱)
R轴
☞ 见P64、图3.3-14
连接轴
减速器
电机
上臂回转段 上臂固定段
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
☞ 见P61、图3.3-10
电机
减速器 上臂
下臂
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
❖ 大型机器人结构1
☞ S轴采用同步皮带传动、手腕电机后置(后驱)
目的:
✓ 减小S轴电机; ✓ 平衡上臂重力; ✓ 提高结构稳定性。
☞ 见P43、图3.1-11, P45、图3.1-13
B/T电机位置 上臂回转
B/T电机位置
腕部回转
前驱
后驱
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
前驱特点 ✓ 结构简单、外形紧凑; ✓ 传动链短、传动精度高; ✓ 电机规格受限,承载能力低,适合小型机器人; ✓ 电机安装空间小、散热差,维修困难; ✓ 上臂前端重量大、重心远,结构稳定性差。
减速器
手腕电机
S轴电机 同步皮带
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
❖ 大型机器人结构2
☞ S轴采用同步皮带传动、上臂连杆驱动
目的:
✓ 减小S、U轴电机; ✓ 降低机器人重心; ✓ 提高结构稳定性。
❖ 典型结构剖析1(前驱)
R轴
☞ 见P64、图3.3-14
连接轴
减速器
电机
上臂回转段 上臂固定段
为了规范事业单位聘用关系,建立和 完善适 应社会 主义市 场经济 体制的 事业单 位工作 人员聘 用制度 ,保障 用人单 位和职 工的合 法权益
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ppt课件
▪ 6自由度轻型臂构型
ppt课件
传动方案设计
ppt课件
集成化设计
▪ 驱动、传动、 传感、控制
ppt课件
集成化设计
▪ 电气及传感器
ppt课件
2.2 机器人的驱动与传动系统结构
2.2.1 驱动—传动系统的构成
驱动器(通过联轴器)带动传动装置(一般为减速器) ,再通过关节轴带动杆件运动。
第二章 机器人的主要结构
机器人本体的结构形式
机 器 人本体
执行机构
传动装置
驱动装置
控制系统
感知系统
手 部 (腕臂腰 操部部部 作 器 )
( 固基
定
或座
移 动
)
电 驱 动 装 置
液 压 驱 动 装 置
气 压 驱 动 装 置
ppt课件
关
节
处伺
理服
器
控
制
器
内外 部部 传传 感感 器器
小臂(上臂)
腕部 手部
伺服电机驱动关节——伺服电机+联pp轴t课节件+传动装置+运动关节+反馈元件
13
2.2.2 驱动装置的类型和特点
1.电动驱动装置 电动驱动装置的能源简单,速度变化范围大,效率高,速度和位置精
度都很高。但它们多与减速装置相联,直接驱动比较困难。 电动驱动装置又可分为直流 (DC)、交流(AC)伺服电机驱动和步进电
微电机+减pp速t课器件
微小型减速器
23
2. 机器人常用传动机构
机器人几乎使用了目前出现的绝大多数传动机构。
ppt课件
24
ppt课件
25
其中腰关节最常用谐波传动、齿轮/蜗轮传动;臂关节最常
用谐波传动、RV摆线针轮行星传动和滚动螺旋传动。腕关节
最常用齿轮传动、谐波传动、同步带传动和纲绳传动。
ppt课件
示教盒
大臂 (下臂)
腰部 基座
ppt课件
控制柜
2
2.1 机器人本体设计的步骤
1、作业分析
作业分析包括任务分析和环境分析,不同的作业任务 和环境对机器人操作及的方案设计有着决定性的影响。
2、总体方案设计
(1)确定动力源
(2)确定构型和安装方式
(3)确定自由度
(4)确定动力容量和传动方式
(5)优化运动参数和结构参数
配套的数字控制系统。
ppt课件
22
2.2.3 机器人的常用传动机构
1. 机器人传动机构的基本要求
(1) 结构紧凑,即同比体积最小、重量最轻; (2) 传动刚度大,即承受力矩作用时变形要小,以提高整机的
固有领率,降低整机的低频振动; (3) 回差小,即由正转到反转时空行程要小,以得到较高的位
置控制精度; (4) 寿命长、价格低。
最常用的运动关节——转动关节和移(直)动关节。 为了进行位置和速度控制,驱动系统中还包括位置和 速度检测元件。
ppt课件
1—码盘; 2 —测速机; 3 —电机; 4 —联轴器; 5 —传动装置; 6 —转动关节; 7 —杆
8 —电机; 9 —联轴器; 10 —螺旋副; 11 —移动关节; 12 —电位器(或光栅尺)
28
1—腰部固定立柱壳体; 2 —腰部回转壳体; 3 —四点接触球轴承; 4 —伺服电机组件; 5—谐波减速器;
机驱动。 直流伺服电机电刷易磨损,且易形成火花。无刷直流电机也得到了
越来越广泛的应用。 步进电机驱动多为开环控制,控制简单但功率不大,多用于低精度
小功率机器人系统。
直流电机(有刷)
盘式无刷直流电机ppt课件 步进电机
交流伺服电机
2. 液压驱动装置
• 优点:功率大,可省去减速装置直接与 被驱动的杆件相连,结构紧凑,刚度好 ,响应快,伺服驱动具有较高的精度。
ppt课件
4
例:六自由度轻型机械臂的设计
▪ 机械臂的设计指标:
ppt课件
构型设计原则
▪ 自由度为主,兼顾复杂程度、刚度及控制难度 ▪ 关节运动范围尽可能大 ▪ 关节无奇异 ▪ 工作空间无死区,至少6自由度 ▪ 构型合理,驱动、传动布置 ▪ 模块化
ppt课件
几何构型
▪ 考虑运动学逆解的存在性:1) 三个相邻关节轴线 交于一点,2)三个相邻关节轴线相互平行
气
气
动
动
气
马
摆
缸
达
动
马
达
气 泵
气 动 三
气 动 控
大
制
件
阀
ppt课件
20
4.其它驱动装置
作为特殊的驱动装置,有压电晶体、形状记忆合金、人工 肌肉等。
压电微驱动并联机器人
形状记忆合金驱动机器人手
ppt课件
21
5.驱动装置的选择原则
➢ 驱动装置的选择应以作业要求、生产环境为先决条件, 以价格高低、技术水平为评价标准。
一般说来,目前负荷为100 kg以下的,可优先考虑电动驱 动装置。
只须点位控制且负荷较小者,或有防暴、清洁等特殊要 求者,可采用气动驱动装置。
负荷很大或机器人周围已有液压源的常温场合,可采用 液压驱动装置。
➢ 对于驱动装置来说,最重要的指标要求是起动力矩大,
调速范围宽,惯量小,尺寸小,同时还要有性能好、与之
腰关节多采用高刚性的RV减速器传动,也可采用谐波传 动、摆线针轮或蜗杆传动。其转动副多采用薄壁轴承或四点 接触轴承,有的还设计有调隙机构。
对于液压驱动关节,多采用回转缸+齿轮传动机构。
ppt课件
27
43
21
5
1 —电机;2 — RV减速器,3 —支架,4 —交叉滚子轴承;5 —电缆
同轴式腰关p节pt课〔件电机上置)
(6)确定平衡方式和平衡量
(构设计
包括机器人驱动系统、传动系统的配置及其结构设计, 关节及杆件的结构设计,平衡机构的设计,走线及电器接口 设计等。
4、动特性分析
估算惯性参数,建立系统动力学模型进行仿真、分析,确 定其结构固有频率和响应特性。
5、施工设计
完成施工图设计,编制相关技术文件。
26
2.3 工业机器人关节的构造及其传动配置
关节是操作机各杆件间的结合部分,通常为转动和移动两 种类型。
工业机器人前三关节通常称作腰关节、肩关节和肘关节, 它们决定了操作机的位置。后面关节决定了操作机的姿态, 称作腕部关节。
2.3.1 腰关节
腰关节为回转关节,既承受很大的轴向力、径向力,又承 受倾翻力矩,且应具有较高的运动精度和刚度。
• 缺点:需要增设液压源,易产生液体泄 漏,不适合高、低温场合,故液压驱动 目前多用于特大功率的机器人系统。
液压控制阀
液压摆动马达
液压pp马t课达件
液压泵
15
ppt课件
ppt课件
ppt课件
应用:并联机器人(六自由度摇摆台)
ppt课件
3.气动驱动装置
气压驱动的结构简单,清洁,动作灵敏,具有缓冲作用。 但与液压驱动装置相比,功率较小,刚度差,噪音大,速度 不易控制,所以多用于精度不高的点位控制机器人。
▪ 6自由度轻型臂构型
ppt课件
传动方案设计
ppt课件
集成化设计
▪ 驱动、传动、 传感、控制
ppt课件
集成化设计
▪ 电气及传感器
ppt课件
2.2 机器人的驱动与传动系统结构
2.2.1 驱动—传动系统的构成
驱动器(通过联轴器)带动传动装置(一般为减速器) ,再通过关节轴带动杆件运动。
第二章 机器人的主要结构
机器人本体的结构形式
机 器 人本体
执行机构
传动装置
驱动装置
控制系统
感知系统
手 部 (腕臂腰 操部部部 作 器 )
( 固基
定
或座
移 动
)
电 驱 动 装 置
液 压 驱 动 装 置
气 压 驱 动 装 置
ppt课件
关
节
处伺
理服
器
控
制
器
内外 部部 传传 感感 器器
小臂(上臂)
腕部 手部
伺服电机驱动关节——伺服电机+联pp轴t课节件+传动装置+运动关节+反馈元件
13
2.2.2 驱动装置的类型和特点
1.电动驱动装置 电动驱动装置的能源简单,速度变化范围大,效率高,速度和位置精
度都很高。但它们多与减速装置相联,直接驱动比较困难。 电动驱动装置又可分为直流 (DC)、交流(AC)伺服电机驱动和步进电
微电机+减pp速t课器件
微小型减速器
23
2. 机器人常用传动机构
机器人几乎使用了目前出现的绝大多数传动机构。
ppt课件
24
ppt课件
25
其中腰关节最常用谐波传动、齿轮/蜗轮传动;臂关节最常
用谐波传动、RV摆线针轮行星传动和滚动螺旋传动。腕关节
最常用齿轮传动、谐波传动、同步带传动和纲绳传动。
ppt课件
示教盒
大臂 (下臂)
腰部 基座
ppt课件
控制柜
2
2.1 机器人本体设计的步骤
1、作业分析
作业分析包括任务分析和环境分析,不同的作业任务 和环境对机器人操作及的方案设计有着决定性的影响。
2、总体方案设计
(1)确定动力源
(2)确定构型和安装方式
(3)确定自由度
(4)确定动力容量和传动方式
(5)优化运动参数和结构参数
配套的数字控制系统。
ppt课件
22
2.2.3 机器人的常用传动机构
1. 机器人传动机构的基本要求
(1) 结构紧凑,即同比体积最小、重量最轻; (2) 传动刚度大,即承受力矩作用时变形要小,以提高整机的
固有领率,降低整机的低频振动; (3) 回差小,即由正转到反转时空行程要小,以得到较高的位
置控制精度; (4) 寿命长、价格低。
最常用的运动关节——转动关节和移(直)动关节。 为了进行位置和速度控制,驱动系统中还包括位置和 速度检测元件。
ppt课件
1—码盘; 2 —测速机; 3 —电机; 4 —联轴器; 5 —传动装置; 6 —转动关节; 7 —杆
8 —电机; 9 —联轴器; 10 —螺旋副; 11 —移动关节; 12 —电位器(或光栅尺)
28
1—腰部固定立柱壳体; 2 —腰部回转壳体; 3 —四点接触球轴承; 4 —伺服电机组件; 5—谐波减速器;
机驱动。 直流伺服电机电刷易磨损,且易形成火花。无刷直流电机也得到了
越来越广泛的应用。 步进电机驱动多为开环控制,控制简单但功率不大,多用于低精度
小功率机器人系统。
直流电机(有刷)
盘式无刷直流电机ppt课件 步进电机
交流伺服电机
2. 液压驱动装置
• 优点:功率大,可省去减速装置直接与 被驱动的杆件相连,结构紧凑,刚度好 ,响应快,伺服驱动具有较高的精度。
ppt课件
4
例:六自由度轻型机械臂的设计
▪ 机械臂的设计指标:
ppt课件
构型设计原则
▪ 自由度为主,兼顾复杂程度、刚度及控制难度 ▪ 关节运动范围尽可能大 ▪ 关节无奇异 ▪ 工作空间无死区,至少6自由度 ▪ 构型合理,驱动、传动布置 ▪ 模块化
ppt课件
几何构型
▪ 考虑运动学逆解的存在性:1) 三个相邻关节轴线 交于一点,2)三个相邻关节轴线相互平行
气
气
动
动
气
马
摆
缸
达
动
马
达
气 泵
气 动 三
气 动 控
大
制
件
阀
ppt课件
20
4.其它驱动装置
作为特殊的驱动装置,有压电晶体、形状记忆合金、人工 肌肉等。
压电微驱动并联机器人
形状记忆合金驱动机器人手
ppt课件
21
5.驱动装置的选择原则
➢ 驱动装置的选择应以作业要求、生产环境为先决条件, 以价格高低、技术水平为评价标准。
一般说来,目前负荷为100 kg以下的,可优先考虑电动驱 动装置。
只须点位控制且负荷较小者,或有防暴、清洁等特殊要 求者,可采用气动驱动装置。
负荷很大或机器人周围已有液压源的常温场合,可采用 液压驱动装置。
➢ 对于驱动装置来说,最重要的指标要求是起动力矩大,
调速范围宽,惯量小,尺寸小,同时还要有性能好、与之
腰关节多采用高刚性的RV减速器传动,也可采用谐波传 动、摆线针轮或蜗杆传动。其转动副多采用薄壁轴承或四点 接触轴承,有的还设计有调隙机构。
对于液压驱动关节,多采用回转缸+齿轮传动机构。
ppt课件
27
43
21
5
1 —电机;2 — RV减速器,3 —支架,4 —交叉滚子轴承;5 —电缆
同轴式腰关p节pt课〔件电机上置)
(6)确定平衡方式和平衡量
(构设计
包括机器人驱动系统、传动系统的配置及其结构设计, 关节及杆件的结构设计,平衡机构的设计,走线及电器接口 设计等。
4、动特性分析
估算惯性参数,建立系统动力学模型进行仿真、分析,确 定其结构固有频率和响应特性。
5、施工设计
完成施工图设计,编制相关技术文件。
26
2.3 工业机器人关节的构造及其传动配置
关节是操作机各杆件间的结合部分,通常为转动和移动两 种类型。
工业机器人前三关节通常称作腰关节、肩关节和肘关节, 它们决定了操作机的位置。后面关节决定了操作机的姿态, 称作腕部关节。
2.3.1 腰关节
腰关节为回转关节,既承受很大的轴向力、径向力,又承 受倾翻力矩,且应具有较高的运动精度和刚度。
• 缺点:需要增设液压源,易产生液体泄 漏,不适合高、低温场合,故液压驱动 目前多用于特大功率的机器人系统。
液压控制阀
液压摆动马达
液压pp马t课达件
液压泵
15
ppt课件
ppt课件
ppt课件
应用:并联机器人(六自由度摇摆台)
ppt课件
3.气动驱动装置
气压驱动的结构简单,清洁,动作灵敏,具有缓冲作用。 但与液压驱动装置相比,功率较小,刚度差,噪音大,速度 不易控制,所以多用于精度不高的点位控制机器人。