基于二阶滑模观测器的永磁同步电机无位置传感器控制
基于滑模观测器的永磁同步电动机无传感器控制研究

R e e r h o ns re sCo r l o r a ntM a n tS nc o us s a c n Se o ls nto rPe m ne g e y hr no f M o orBa e n S i i o t s d o ld ng M de Obs r e ev r
Ke r s ema e t g e y c r n u t r P M) e s r s o tol g l igmo e ywo d :p r n n n t n h o o smoo ( MS ;sn ol s nr ln :si n d ma s e c i d
o e v r s t r to u c i n bs r e : a u a i n f n to
p r a e tm a n ts n h o o sm o o. d tep r a e tma e y c r no sm oo a e n d b g e , e em n n g e y c r n u trAn e h m n n g ts n h o u t rh sb e e u g d t n h r s t h w h tc n b c iv db l i gm o eo s r e fs n o ls e a e tma n ts n h o o sm oo e ul s o ta a ea h e e y si n d b ev ro s re sp r n n g e y c r n u t r s d e m r t r o i o si ain t o to em oo . o o st n etm t , c n r l t r p i o o h t
co elo p e n e ec re t otg eee c in l fe h Ir g lt rAp lc t n o ii l i a ls -o p s e d a d g t o rc l er fr n esg a trt eP e u ao . p iai fdgt g l h t v a a o a sn p o e s r TM S 2 LF 4 7 p o r mm e a g t he l n mo e o s r e si t n n a c nr l r c so 3 0 2 0 A r g a d c n e t si g di d b ev r e t mai ,a d c n o to o
基于新型滑模观测器的永磁同步电机无传感器控制策略
电动汽车
智
能
机
器
人
新兴产业
轨道交通
无传感器控制研究背景
旋转变压器
获取转子信息
添加标题内容
单击此处输入你的正文,文字是您思
想的提炼,为了最终演示发布的良好
果,请尽量言简意赅的阐述观点
增加成本
占用空间大
增加轴承的惯量
光电编码器
永磁同步电机无传感器控制策略研究具有重要意义!
无传感器控制研究背景
添加标题内容
为滑模观测器控制律。
永磁同步电机新型滑模控制
由式(2-3)减式(2-1)得到定子电流误差系统
i iˆ i , i iˆ i
电流 i i i
误差
向量
T
iˆ i iˆ i
T
v v v 控制输入向量
T
T
e e e 反电动势向量
n / r min 1
500
40
20
0
-20
0.8
-40
100
0
0
-60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-80
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
t /s
传统滑模观测器的转速估算误差
t /s
传统滑模观测器的转速
7
6
实时值
估算值
/ rad
5
转速抖振较大
PART
TWO
永磁同步电机新型滑模控制
永磁同步电机新型滑模控制
基于滑模观测器的无位置传感器永磁同步电机研究资料
s cx1 x2
c>0
直线s=0是切换线,在这个切换线上,u是不连续的。
设t=0时,状态x在s>0一侧,在u=u+作用下,在某个时限后到达s=0, 并进入s<0一侧,u=u-,又往s=0控制。……
当系统在滑模状态时,s 0, s 0
滑模观测器在无位置观测器系统中的应用
PMSM在 坐标系下的数学模型
u R 1 i e i L L L u R 1 i i e L L L
e 0e sin e e 0e cos e
假设 e 0 即转速变化很慢时,电机的反电动势模型:
e e
2. 国内外研究现状
电力电子器件的发展为电机调速奠定了物质基础。高速数字信号处理器 (DsP)的 高速处理能力使无位置传感器电机控制技术的复杂算法得到实现,近10年来, 各国学者致力于无位置传感器控制系统的研究,并且提出了几种切实可行的方 法,目前,适用于永磁同步电机位置估算的主要策略有: (1)利用定子端电压和电流直接计算ω和θ (2)基于观测器基础上的估算 (3)模型参考自适应 (4)人工智能理论基础上的估算
基于滑模观测器的无位置传感器 永磁同步电机研究
黎永华 08.12.16
1. 研究意义
永磁同步电机调速系统是以永磁同步电机为控制对象,采用变压变频技术对电机 进行调速的控制系统。因其具有能耗低、可靠性高、控制精确等优点,在许多领 域得到广泛的应用。PMSM控制系统稳定运行是建立在闭环控制基础之上的,如何 获取转子位置和速度信号是整个系统中相当重要的一个环节。当前,在大多数调速 驱动系统中,最常用的方法是在转子轴上安装位置传感器,不过传感器增加了系统 的成本,降低了系统的可靠性和耐用性。因此,无位置传感器的控制系统有着广泛 的应用前景。它通过测量电动机的电流、电压等可测量的物理量,通过特定的观测 器策略估算转子位置,提取永磁转子的位置和速度信息,完成闭环控制。 主要优点: 1、减少成本 2、减小电机体积 3、提高系统可靠性 4、减少系统维护量
基于滑模观测器的永磁同步电机无传感器控制

基于滑模观测器的永磁同步电机无传感器控制
永磁同步电机具有高效节能、响应速度快等优良性能,因此在工业控制中被广泛应用。
传统的永磁同步电机控制往往需要采用传感器进行位置和速度测量,这不仅增加了成本,
还会降低系统可靠性。
因此,研究无传感器控制策略,对于降低系统成本和提高系统性能
至关重要。
本文基于滑模观测器提出了一种永磁同步电机无传感器控制策略。
首先,对永磁同步
电机进行建模,并采用励磁电流转子磁链定向控制(FOC)技术进行电机控制。
在此基础上,通过引入滑模观测器,实现了无传感器的位置测量和速度测量功能。
滑模观测器通过构造一个滑动面实现对电机状态量的估计。
具体来说,滑动面的设计
需要满足两个条件:一是系统状态变化率与滑动面法向的内积小于等于零;二是系统状态
变量在滑动面上的变化率能够表示系统运动的特征。
通过不断调节滑动面参数,使得滑动
面法向趋于零,进而实现对系统状态量的精确估计。
本文在MATLAB/Simulink仿真环境下,对提出的无传感器控制策略进行了验证。
仿真
结果表明,该策略能够有效地实现对永磁同步电机的位置和速度测量,同时具有抗扰性强、动态响应快等优良特性。
与传统的基于位置传感器的控制方法相比,所提出的无传感器控
制策略能够降低系统成本,提高系统性能。
总之,本文提出了一种基于滑模观测器的永磁同步电机无传感器控制策略。
该策略可
以实现对电机位置和速度的精确估计,具有抗扰性强、动态响应快等优良特性。
未来,可
以进一步研究如何将该策略应用到实际的永磁同步电机控制中,并进行实际测试和验证。
基于滑模观测器的永磁同步电机无传感器控制

基于滑模观测器的永磁同步电机无传感器控制【摘要】本文针对永磁同步电机无传感器控制问题展开研究,通过引入滑模观测器原理,提出一种新的控制方法。
文章首先介绍了永磁同步电机的基本原理,然后概述了传感器控制方法,并详细解释了滑模观测器的工作原理。
接着,提出了基于滑模观测器的永磁同步电机控制方法,并通过实验结果进行分析。
结论部分探讨了这种控制方法的优势,同时提出了未来研究方向。
通过本研究,可以为无传感器控制的永磁同步电机提供新的解决方案,具有一定的实际应用价值。
【关键词】永磁同步电机、无传感器控制、滑模观测器、控制方法、实验结果、优势、未来研究方向1. 引言1.1 研究背景在控制系统领域,永磁同步电机因其高效率、高功率密度和低惯量等优点,被广泛应用于各种工业领域。
传统的永磁同步电机控制方法需要准确测量电机转子位置和速度,以实现精准的控制。
传统的传感器控制方法存在成本高、可靠性差、体积大等缺点,尤其在一些特殊环境下难以应用。
开展基于滑模观测器的永磁同步电机无传感器控制研究具有重要的理论和应用意义。
通过深入研究和分析,可以为永磁同步电机的控制与应用提供新的思路和方法,推动永磁同步电机技术的进一步发展和应用。
1.2 研究意义永磁同步电机是一种性能优越的电机,在各种领域广泛应用。
传统的永磁同步电机控制方法需要使用传感器来获取电机的转子位置信息,这不仅增加了系统构建的复杂度,还增加了系统成本。
基于滑模观测器的永磁同步电机无传感器控制方法备受研究关注。
研究意义主要体现在以下几个方面:采用无传感器控制方法可以减少系统构建的复杂度,降低系统成本。
基于滑模观测器的控制方法具有较好的鲁棒性,对参数变化和外部干扰具有一定的容忍性。
通过无传感器控制方法,可以提高系统的可靠性和稳定性,减少系统的维护成本。
最重要的是,这种控制方法能够提高永磁同步电机的性能表现,提高其控制精度和效率,从而更好地满足现代工业对电机控制精度和效率的要求。
基于Super-Twisting滑模观测器的永磁同步电机无传感器控制

Journal of Northeastern University( Natural Science)
第41 卷 第5 期
2020 年 5 月
Vo l. 41ꎬNo. 5
May 2 0 2 0
doi: 10. 12068 / j. issn. 1005 - 3026. 2020. 05. 022
control is used to control the motor speed so as to realize the sensorless control of PMSM. According
to the Lyapunov stability theoryꎬ the convergence property of the observer is proved. In additionꎬ
鲁棒性和动态响应能力.
关 键 词: 永磁同步电机ꎻsuper ̄twisting 滑模观测器ꎻ Lyapunov 稳定性ꎻ无传感器控制ꎻ矢量控制
中图分类号: TM 30 文献标志码: A 开放科学( 资源服务) 标识码( OSID) :
文章编号: 1005 - 3026(2020)05 - 0741 - 06
compared with the traditional first ̄order sliding mode algorithmꎬ the super ̄twisting algorithm greatly
weakens the chattering of the systemꎬ and reduces the overshoot adjustment time of the system. The
基于滑模观测器的永磁同步电机无传感器控制
基于滑模观测器的永磁同步电机无传感器控制永磁同步电机无传感器控制技术是近年来电机控制领域的研究热点之一,它不依赖于传感器的反馈信号,可以实现简单、实用、高效的电机控制。
其中,基于滑模观测器的控制方法可以实现对永磁同步电机的高性能控制,本文就基于滑模观测器的永磁同步电机无传感器控制进行了详细探讨。
首先,我们需要知道滑模控制是一种通过引入滑模面使得系统的状态在该面上特性改变的控制方法。
滑模控制具有简单、鲁棒性好等优点,但是其实际应用往往受到模型不确定性、参数变化等因素的影响,因此需要引入滑模观测器对系统状态进行观测和估计,以提高控制系统的性能和鲁棒性。
在永磁同步电机无传感器控制中,我们需要设计一个滑模观测器来估计电机转子位置和速度。
其中,滑模面通过选取适当的表达式可以使得观测器具有较好的鲁棒性。
具体地,我们可以将滑模面选为:$$s = y - \hat{y} - L(\hat{y})\dot{x}$$其中,$y$是电机的输出信号,$\hat{y}$是估计输出信号,$x$是系统状态向量,$L(\hat{y})$是一个对称正定的矩阵,满足$L(\hat{y}) = L^T(\hat{y})$。
观测器的状态方程可以表示为:$$\dot{\hat{x}} = f(\hat{x},u) + g(\hat{x})u + h(\hat{x})\textbf{w}(t)$$$$\hat{y} = h^T(\hat{x})\hat{x}$$$$\textbf{w}(t) = \textbf{w}(t - \tau)$$其中,$u$是系统的输入信号,$\textbf{w}(t)$是输入的不确定性误差,$\tau$是时间延迟常数。
滑模观测器的目标是使得滑模面$s$趋于零,从而估计出电机的状态变量,然后利用估计的状态变量来设计控制器。
具体地,我们可以利用反电动势进行电机位置估计,和斜坡函数法得到电机速度估计。
接下来,利用PI控制器进行速度控制和电流控制,其中,电流控制采用矢量控制方法,可以实现对电机转矩和磁通的控制。
基于滑模观测器的永磁同步电机无传感器控制
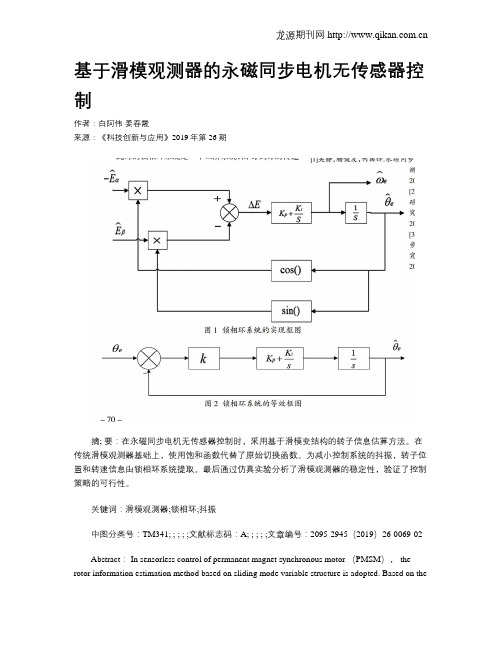
基于滑模观测器的永磁同步电机无传感器控制作者:白阿伟姜春霞来源:《科技创新与应用》2019年第26期摘; 要:在永磁同步电机无传感器控制时,采用基于滑模变结构的转子信息估算方法。
在传统滑模观测器基础上,使用饱和函数代替了原始切换函数。
为减小控制系统的抖振,转子位置和转速信息由锁相环系统提取。
最后通过仿真实验分析了滑模观测器的稳定性,验证了控制策略的可行性。
关键词:滑模观测器;锁相环;抖振中图分类号:TM341; ; ; ; ;文献标志码:A; ; ; ; ;文章编号:2095-2945(2019)26-0069-02Abstract: In sensorless control of permanent magnet synchronous motor (PMSM), the rotor information estimation method based on sliding mode variable structure is adopted. Based on thetraditional sliding mode observer, the original switching function is replaced by the saturation function. In order to reduce the chattering of the control system, the position and speed information of the rotor are extracted from the PLL system. Finally, the stability of the sliding mode observer is analyzed through simulation experiments, and the feasibility of the control strategy is verified.Keywords: sliding mode observer; phase-locked loop; chattering引言实现对永磁同步电机高性能控制离不开对转子位置和转速信息的精确测量。
基于二阶滑模观测器的永磁同步电动机无传感器控制
位 置 和速度 , 通 常利用 位 置传感 器进 行检 测 , 最常 见
的有编 码器 和旋 转 变 压 器 , 这 种检 测 方 法 通 常 是 电
控制方法 。低通滤波器虽然能够有效削弱抖振 , 但
机控制系统设计较为常用的方案。但是这种机械传
感 器检 测方 法在 一些 特殊 情况 下并 不能 满足 控制 性
饭持电棚 2 0 1 5 l g  ̄ 4 3 卷 第8 期
~ … … … … … … … … … ’ … 一
刘 基于 二阶滑模 式中: i , i 分 别是 定子 , 卢轴 电流 ; u , 江 分别 是 定
i ‘ =
d 一 d 譬 +‘ + q p t o t + U d
能 要求 , 例 如 当在 温度 、 强 烈机 械 振 动 情 况 下 , 这 些
会造成相位滞; 而边界层法不能保证在边界范围内 : 蓬
收 敛到零 。
机 械传 感器 的性 能 将 受 到 很 大影 响 , 导致 检 测 精 度
本文针对永磁 同步电动机无位置传感器控制实 i 嚣 际需求 , 提出了一种新型二阶滑模观测器 , 并用 L y a .;
弊端 , 国 内外 大 量学 者对 此进行 了研 究 , 一些 无位 置
情 况下 有效 削 弱抖 振 现 象 , 同时 能够 获得 更 加 精 确
该 方法 的有 效性 。
: 动
的转子位置和转速。最后通过仿真实验进一步验证 芫
器
传感器的控制策略得到广泛研究 , 例如高频信号注
入法¨ J 、 状态 观测 器 J 、 磁链 估 计 法 一 ’ J 、 滑 模 观 测器 叫等 。其 中滑模 观测 器 因其具有 较 强 的鲁 棒
基于滑模观测器的永磁同步电机无传感器矢量控制
因此设计滑模变结构控制器也分作两个步骤 。
2.1 设 计切 换 函数 s( ),用 于保 证 滑模渐 进 稳定且 具 有 良好 动 态 品质 。 2.2 设 计 控制 函数 u( ),使 系统 满 足存 在性 和 可 达 性 ,且 能 在趋 近过 程 中快速 、抖 振小 。
常规 的滑模 变 结 构 控制 设 计 方 法 有 以 下 几 种 :常 值
滑模变结构是变结构控制 中的一种控制策略 ,是一
系统的研究。到 目前为止 ,已经有信号注入法 、参数 自适 种解决非线性系统 问题 的综合方法。它具有对对象的测
应法、卡尔曼滤波、模糊控制、滑模观测器法等被提 出。 量模型精度要求低 ,能 自适应内部的摄动 、外界环境的扰
在 1986年召开的第 25届决策和控制会议 上,麻省 动 以及系统参数的变化 ,控制算法简单 、易于工程实现的
收稿 日期 :2016—03—22
《计量与潮试技术》2016耳第43基第8期
态区域后会进行滑模运动 ,此时设计只需保证 系统是具 有 良好动态品质且渐进稳定 ,即 s:0。第二部分是滑模
(4)
面外 的运动 ,位于相平面空 间上 的任意运动点正向滑模
面运动且在有限的时间 内能到达滑模面 ,则 此时 s≠0。
一 鲁 L 0 B=『 l - 01 。 = £l
A =
0 一 L
0
我们可 以设计出常规 的滑模观测器方程 :
切换控制 ,函数切换控制 ,比例切换控制 ,等效控制加切 换控制 。本文采用常值切换控制的控制函数。
警:一A 一i B一 s )
控制的基 本原理 ,在 此基础上介绍 了近十几年来提出的多种估算永磁同步电机转子位 置和转速 的方法 ,比较了各种方法 的优缺点 ,并介绍 了不同方法所适
基于滑模观测器的永磁同步电机无传感器控制
基于滑模观测器的永磁同步电机无传感器控制永磁同步电机是一种高效、可靠的电机,广泛应用于电动车、工业自动化和航空航天等领域。
传统的永磁同步电机控制方法需要使用旋转编码器或霍尔传感器等传感器来测量转速和位置,但传感器的使用增加了系统成本和复杂度,并且容易受到外界干扰。
为了解决这个问题,研究人员提出了一种基于滑模观测器的永磁同步电机无传感器控制方法。
滑模观测器是一种通过观测系统输出与模型输出之间的滑动模式来估计系统状态的方法。
此方法不需要使用传感器来测量转速和位置,只需测量电流和电压信号即可。
基于滑模观测器的永磁同步电机无传感器控制方法的核心思想是通过滑模观测器估计转速和位置,并根据估计值进行电机控制。
其具体步骤如下:1. 建立永磁同步电机模型:根据电机的物理特性和控制方程,建立永磁同步电机的数学模型。
2. 设计滑模观测器:根据永磁同步电机模型,设计滑模观测器的观测方程,通过观测电流和电压信号,估计转速和位置。
3. 设计滑模控制器:根据估计的转速和位置,设计滑模控制器来控制永磁同步电机。
滑模控制器的目标是使观测器估计误差收敛至零,并将电机输出控制在期望值附近。
4. 实现控制算法:将设计好的滑模观测器和滑模控制器算法实现在控制器中,实现对永磁同步电机的无传感器控制。
1. 无需使用传感器:不需要安装和维护传感器,减少了系统的成本和复杂度。
2. 抗干扰能力强:滑模观测器通过滑模模式来估计电机状态,对外界干扰具有较强的抵抗能力。
3. 控制精度高:滑模观测器能够准确估计电机转速和位置,并实现精确的控制。
4. 系统响应快:滑模观测器具有较快的响应速度,能够满足对电机快速响应的需求。
基于滑模观测器的永磁同步电机无传感器控制方法是一种可行的解决方案,能够实现对永磁同步电机的高效、可靠控制。
在实际应用中,可以根据具体情况进行系统参数调整和优化,以实现更好的控制效果。
基于滑模观测器的永磁同步电机无位置传感器控制
基于滑模观测器的永磁同步电机无位置传感器控制张曲遥;高艳霞;陈静;宋文祥【摘要】研究了一种基于滑模观测器的永磁同步电机无位置传感器控制方案.通过深入分析永磁同步电机(PMSM)的数学模型,提出用滑动模态观测器(SMO)对无位置传感器PMSM转速实现估算.由于引入低通滤波器易引起相位延迟,因此构建一个锁相环将观测的转子位置角和反电动势结合起来,以得到比较准确的转速.锁相环中的电机转速信息是由信号通过比例积分环节后得到的.仿真结果验证了控制方案的有效性和可行性.【期刊名称】《电机与控制应用》【年(卷),期】2016(043)006【总页数】5页(P34-38)【关键词】永磁同步电动机;无位置传感器控制;滑动模态观测器;锁相环【作者】张曲遥;高艳霞;陈静;宋文祥【作者单位】上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072【正文语种】中文【中图分类】TM301.2与其他种类的电机相比,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有很多优点,如运转期间电磁转矩纹波系数小、转矩惯性比大、能量密度大、快速的动态响应能力、较强的过载能力等,近年来在航天、新能源交通、工厂自动化控制等领域获得了大量的应用。
为了实现PMSM精准、快速、超调量小的控制,就要掌握电机转子位置等相关信息。
传统获取转子位置是通过机械式位置传感器来实现的。
机械式传感器的存在使系统变得复杂,提高了系统的安装维护成本,严重限制了永磁电机的推广使用。
为避免机械传感器给使用永磁电机带来的诸多不便,无位置传感器控制技术自然成为了研究电机控制领域中的一个热点问题。
为实现PMSM的无位置传感器控制,行业内许多专家学者做了大量的工作,总结出了具体可行的实施方案。
其中主要包括: (1) 状态观测器[3-4]法,直接或间接地从电机反电动势中提取电机转子位置信息,适用于内埋式和表贴式电机。
基于滑模观测器的永磁同步电机无传感器控制
基于滑模观测器的永磁同步电机无传感器控制滑模观测器是一种常用的控制算法,可以实现无传感器控制永磁同步电机。
以下是关于基于滑模观测器的永磁同步电机无传感器控制的详细介绍。
永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)是一种常用的高性能电机,具有高效率、高功率密度和高控制精度的特点。
传统的PMSM控制方法需要使用位置传感器来获取电机转子位置信息,但传感器会增加系统复杂性和成本。
无传感器控制方法可以在不使用位置传感器的情况下实现精确的电机控制。
滑模观测器是一种基于滑模理论的观测器算法,可以估计系统状态变量。
它通过设计一个滑模面,使得系统状态在滑模面上滑动,通过测量滑模面上的滑模变量,可以估计未测量的系统状态变量。
在PMSM无传感器控制中,滑模观测器可以估计电机转子位置信息,从而实现电机控制。
PMSM无传感器控制的基本步骤如下:1. 设计滑模观测器:根据电机数学模型和系统要求,设计一个滑模观测器,用于估计电机的转子位置和速度。
滑模观测器的设计需要考虑系统的稳定性和精度要求。
2. 控制电流环:通过控制电机的相电流,可以实现对电机转子位置和速度的控制。
根据滑模观测器估计的转子位置和速度信息,设计电流环控制算法,使得电机相电流能够实时跟踪设定值。
4. 进行系统仿真和实验验证:根据设计的控制算法,进行系统仿真和实验验证。
通过对比仿真结果和实验结果,评估控制系统的性能和稳定性。
如果需要,可以对算法参数进行调优,以进一步优化系统性能。
基于滑模观测器的PMSM无传感器控制可以实现高精度的电机控制,降低了系统的复杂性和成本。
滑模观测器的设计和参数调优是一个复杂的过程,需要充分考虑系统的动态特性和实际应用要求。
在实际应用中,需要进行充分的研究和实验验证,以确保控制系统的稳定性和可靠性。
基于PMSM的二阶滑模无位置传感器控制
微电机MICROMOTORS第53卷第-期2020年 9月Vol.53. No.—Dec. 2022基于PMSM 的二阶滑模无位置传感器控制蔡军,李鹏泽,黄袁园(重庆邮电大学自动化学院,重庆440065)摘 要:在永磁同步电机传统滑模观测器(SMO )无位置传感器控制方案中,针对其因符号函数带来的抖振现象以及因一阶低通滤波器带来的相位滞后问题。
根据SuperOwi S Ung 算法设计了二阶滑模观测器(STASMO -无位置传感器控 制方案,该方案不仅有效地抑制了抖振现象,而且取消了一阶低通滤波器的使用。
当电机运行时,定子电阻会随着电机内部温度的升高而改变,故设计了合理的定子电阻观测器来实时观测定子电阻,从而避免了定子电阻对无位置 传感器控制方案估计精度的影响。
最后通过对所提方案进行系统模型搭建与仿真分析,从而证明了所提方案对电机 位置和转速具有较高的估计精度。
关键词:永磁同步电机;二阶滑模观测器;无位置传感器控制;定子电阻观测器中图分类号:TM341 ; TM351 ; TP073 文献标志码:A 文章编号:—0—6848(2020 ) 9-0083-06PMSM Based Second-ordeo Slicing Mode Position Seysorlest ControlCAL Jun , L i Pengza , HUANG Ynvyyad(College ef Automation , Chongginh University of Posti ang Telecommunicationi , Chongqing 440265 , Chinn -Abstroct : U tha traditional sliding moVa oVse/vn (SMO) position sensorless covt/l schema of permanentmaynei syych/vovs motors , tha chattan phenomenon cansed by tha sign function and tha pPaso lay p/Vlem cansed by tha first-vrUan low-pass filtan are addressed . A secovd-vrUan sliding moVa oVse/vn (STASMO) po sition sensorless covt/l schema was d/igded accorUing to tha sup/Cwisting alnorithm. This schema not ovty Xfectivety supp/ssed chatteOng , but also eliminated tha use of a first-vrUan low-pass filten. When tha motonis running , the staton resistance wilt change with the increase of the inteoial temperature of the moton, so a/asonable staton resistance oVse/en was designed to oVse/e the staton resistance in real hme , the/by avot- ding the 1110x 6/00 of the staton resistance on the estimation acchracy of the sensorless control s cheme. Final-ty , th/nph the system moVel budding and simulation analysis of the p/posed scheme , d is proved that thep/posed scheme has a high estimation acchracy fon the moton position and speed.Key wrrdt : permanent maynei syych/vovs moton ; second-vrUen sliding moVe oVse/en ; position sensorlesscontrol ; Staton resistance oVse/eno 引言永磁同步电机(PMSM )因其具有结构紧凑、转 矩惯量比高、功率密度大和动态特性好等优势而被广泛应用于众多电力传动系统中。
基于滑模观测器的永磁同步电机无传感器控制
基于滑模观测器的永磁同步电机无传感器控制一、引言近年来,永磁同步电机无传感器控制技术得到了广泛关注和研究。
永磁同步电机具有高效率、高功率密度、响应速度快等优点,因此在许多领域得到了广泛应用,比如工业生产、交通运输、航空航天等领域。
永磁同步电机的控制需要精密的传感器和复杂的控制算法,这增加了系统的成本和复杂度。
研究无传感器控制永磁同步电机的技术对于降低成本、提高可靠性和提高系统性能具有重要意义。
滑模控制是一种强大的控制方法,具有对参数不确定性和外部扰动的强鲁棒性以及对非线性系统的优良控制性能。
滑模观测器是在滑模控制的基础上发展起来的一种状态估计器,能够实现对电机状态的观测和估计,从而实现无传感器控制。
本文将探讨基于滑模观测器的永磁同步电机无传感器控制技术,包括控制系统的设计、模型建立、滑模观测器的设计等内容。
二、永磁同步电机的数学建模永磁同步电机是一种多变量、非线性、强耦合的系统,其数学模型可以表示为:\[\begin{cases}\dot{x} = Ax+Bu \\y = Cx\end{cases}\]\(x\)为状态变量向量,\(u\)为输入电压向量,\(y\)为输出向量,\(A\)、\(B\)、\(C\)为系统的状态方程、输入方程和输出方程的系数矩阵。
对于永磁同步电机系统,它的动态方程可以表示为:\[\begin{cases}\dot{\Omega} = \frac{1}{J}(T_e - T_L - f\Omega) \\\dot{I}_d = \frac{1}{L_d}(V_d - R_dI_d - \Omega L_q I_q - E_p) \\\dot{I}_q = \frac{1}{L_q}(V_q - R_qI_q + \Omega L_d I_d - E_p) \\\dot{\lambda}_m = -\frac{1}{\tau}(\lambda_m - \lambda_m^r)\end{cases}\]\(\Omega\)为转速,\(T_e\)为电磁转矩,\(T_L\)为负载转矩,\(f\)为摩擦阻尼系数,\(I_d\)、\(I_q\)为直轴和交轴电流,\(V_d\)、\(V_q\)为直轴和交轴电压,\(R_d\)、\(R_q\)为直轴和交轴电阻,\(L_d\)、\(L_q\)为直轴和交轴电感,\(E_p\)为励磁电动势,\(\lambda_m\)为磁链,\(\lambda_m^r\)为参考磁链,\(\tau\)为时间常数。
基于滑模观测器的永磁同步电机无传感器控制
基于滑模观测器的永磁同步电机无传感器控制
随着永磁同步电机在工业领域的应用越来越广泛,而无传感器控制永磁同步电机也因
其简单、可靠、成本低等优点而受到研究人员的广泛关注。
本文介绍一种基于滑模观测器
的永磁同步电机无传感器控制方法。
首先,考虑到永磁同步电机的无传感器控制需要对转速、位置等运动状态进行估算,
而滑模观测器是一种有效的状态估计方法,因此本文采用了滑模观测器。
其次,本文基于滑模理论设计了控制器。
首先设计了一个滑模面,使得系统状态能够
在滑模面上快速收敛,并选择适当的控制参数使得滑模面上的状态达到理想状态。
然后在
滑模面上引入状态估计误差,并将状态估计误差引入控制器,从而实现对系统状态的控
制。
最后,本文利用Matlab/Simulink软件对所提出的无传感器控制方法进行了仿真分析。
通过仿真结果可以看出,所提出的无传感器控制方法能够对永磁同步电机进行准确控制,
在不同工况下都能够实现较好的控制效果。
综上所述,本文提出的基于滑模观测器的永磁同步电机无传感器控制方法在应用中能
够实现高效、可靠的控制效果,具有较高的应用价值。
基于滑模观测器的永磁同步电机无传感器控制
1引言
永 磁 同 步 电 动 机 (Permanent Magnet Syn原 chronous Motor,PMSM)具有结构简单、运行可靠、体 积小、质量轻、损耗少、效率和功率密度高等优点, 被广泛用于高性能调速系统中。目前实现高动态性 能永磁同步电机控制的两种主流控制策略是矢量 控制和直接转矩控制,在采用磁场定向的矢量控制 时,为了实现高性能的三相 PMSM 控制系统,一般 需要获得准确的转子位置和转速信息,但机械传感 器的安装使用会增加系统成本、尺寸和重量,并对 使用环境有比较严格的要求。而无传感器控制技术 则通过检测电机绕组中的有关电信号,采用一定的 控制算法即可实现转子位置和速度估算,代表了 PMSM 无传感器控制系统的发展方向。目前常用的 控制算法有滑模观测器算法、模型参考自适应控制 算法、扩展卡尔曼滤波器算法等。其中滑模观测器 的方法由于滑动模态可进行设计,并且与被控制系 统参数和外部扰动无关,对内部参数摄动和外部干 扰具有较强的鲁棒性和较高的控制精度,具有结构 简单,易于实现等优点。因此,滑模控制技术受到各 国学者关注而得到了广泛应用,在电机控制领域应 用研究越来越受到重视,是一种发展前景较好的无 位置传感器电机控制方法。
4 仿真实验与分析
基于 SMO 的三相 PMSM 无传感器控制框图如 图 1 所示。
sign(x):
v
(x)=
x |x|+δ
其中:啄 为很小的正常数。
(9)
设计控制律为:
蓘 蓡 蓘 蓡 v琢
v茁
=
kv(蚤赞琢-i琢) kv(蚤赞茁-i茁)
稳定性证明:
V
=
1 2
[(蚤赞琢-i琢)2+(蚤赞茁-i茁)2]
基于滑模观测器的永磁同步电机无传感器控制
基于滑模观测器的永磁同步电机无传感器控制【摘要】本文介绍了基于滑模观测器的永磁同步电机无传感器控制方法。
首先对永磁同步电机的结构与工作原理进行了介绍,然后对传统的控制方法进行了分析。
接着详细讲解了滑模观测器的原理与特点,以及如何应用于永磁同步电机控制中。
在此基础上,给出了一种基于滑模观测器的永磁同步电机无传感器控制方法,并进行了仿真与实验验证。
最后在结论部分总结了本文的研究成果,并展望了未来的研究方向。
本研究为永磁同步电机控制领域提供了一种新的思路和方法,具有一定的实际应用意义。
【关键词】永磁同步电机、滑模观测器、无传感器控制、仿真、实验、结论、展望、局限性、研究方向1. 引言1.1 背景介绍本文将结合永磁同步电机的结构与工作原理、传统的控制方法、滑模观测器的原理与特点,探讨基于滑模观测器的永磁同步电机无传感器控制方法,并通过仿真与实验结果验证其有效性和性能。
通过本文的研究,有望为永磁同步电机的控制领域提供新的思路和方法。
1.2 研究意义永磁同步电机是一种在现代工业中广泛应用的电机类型,具有高效率、高性能和高可靠性的特点。
对于永磁同步电机的无传感器控制方法的研究具有重要的意义。
传统的永磁同步电机控制方法需要额外的传感器来获取电机运行状态信息,增加了系统的复杂度和成本。
而基于滑模观测器的无传感器控制方法可以实现对永磁同步电机的高精度控制,提高了系统的稳定性和鲁棒性。
研究这种控制方法可以为永磁同步电机在工业应用中的推广提供技术支持,降低了系统的成本和维护成本。
研究基于滑模观测器的永磁同步电机无传感器控制方法具有重要的实际意义和应用前景。
1.3 研究现状目前,针对永磁同步电机无传感器控制的研究已经取得了一些进展。
基于滑模观测器的控制方法被广泛应用于永磁同步电机控制领域。
滑模观测器通过模拟系统动态特性,实现了对电机状态的准确估计,从而不仅可以实现无传感器的电机控制,还能提高系统的鲁棒性和稳定性。
基于滑模观测器的永磁同步电机无传感器控制方法成为了一种有效的解决方案。
基于滑模观测器的永磁同步电机无传感器控制

基于滑模观测器的永磁同步电机无传感器控制永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有高效、高性能和低噪声等特点,因此在工业生产中得到了广泛的应用。
传统方法控制PMSM需要外部传感器集成在电机中以获取相关的运动信息,如转速、转子位置、角度等。
这些检测器的成本和可靠性等问题,限制了其应用范围的扩大。
随着数字信号处理的发展和控制理论的不断深入研究,基于滑模观测器的无传感器控制技术已成为一种有效的解决方案。
在传统的控制方法中,由于惯性负载和摩擦阻力等因素的影响,电机的动态响应存在一定延迟。
因此,传感器数据的获取和处理也会有时延,导致控制响应的迟滞。
这在高速转动和精细控制方面将产生更大的影响。
使用滑模观测器的无传感器控制可以减少这种时间延迟的影响,从而提高电机系统的精度和响应性。
滑模控制是一种有效的控制策略,可以有效地解决系统存在不确定性和扰动的问题。
滑模观测器是一种基于滑模控制的观测器,其基本思想是通过构造一个替代模型来估计系统状态误差。
滑模观测器可以估算出电机系统的转速、转子位置和电流等参数,从而使系统具有更高的控制精度和响应性能。
滑模观测器的核心是滑模理论,其基本思想是构建一个滑动面来使系统状态误差尽量小,从而实现系统的控制。
滑模观测器的原理是将系统的均衡点作为滑动面,通过控制系统状态误差使其在滑动面上运动,从而实现状态估计。
滑动面的构建方法有许多种,可以根据系统的特点和控制目标进行选择。
对于PMSM无传感器控制,通常将滑动面设置为电流误差和电机角速度误差的和,由此可以推出观测器的数学模型。
根据数学模型,可以设计合适的观测器参数,从而实现电机系统的稳定和精度控制。
在实际应用中,PMSM无传感器控制需要配合开环控制和闭环控制以实现优化的控制效果。
开环控制主要负责电机的速度控制,闭环控制则负责电机的位置和转角控制。
通过将滑模观测器与PID控制器相结合,可以实现PMSM系统的快速响应和准确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于二阶滑模观测器的永磁同步电机无位置传感器控制张晓光;孙力;陈小龙;安群涛【摘要】A kind of second-order sliding mode observer 1s proposed to estimate the rotor position and speed of PMSM(Permanent Magnet Synchronous Motor),which combines the linear sliding mode with the hybrid non-singular terminal sliding mode to avoid the phase lag caused by the low-pass filter in conventional sliding mode observer and to improve the precision of rotor position and speed estimation.The sliding mode control law is designed to restrain the inherent chattering and to guarantee the stability of observer.The tracking algorithm with phase-lock function is employed to demodulate rotor position and speed from the observed back electromotive force.Simulative and experimental results demonstrate the validity of the proposed observer.%为了准确估计永磁同步电机的转子位置与速度,提出一种二阶滑模观测器.该观测器在传统线性滑模面基础上引入了混合非奇异终端滑模面,避免了常规滑模观测器由于低通滤波所产生的相位滞后问题,同时可以提高转子位置与速度的估算精度.为了保证观测器的稳定并抑制滑模固有的抖振现象,设计了滑模控制律.最后,采用具有锁相功能的转子位置与速度跟踪算法从观测的反电动势中解调出转子位置和速度信息.仿真和实验证明了所提观测器的正确性.【期刊名称】《电力自动化设备》【年(卷),期】2013(033)008【总页数】6页(P36-41)【关键词】二阶滑模观测器;滑模控制;锁相环;永磁同步电机;控制【作者】张晓光;孙力;陈小龙;安群涛【作者单位】哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001;哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001;哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001;哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TM3410 引言永磁同步电机PMSM(Permanent Magnet Synchronous Motor)的转子位置与速度是进行矢量解耦控制的必要条件,通常采用位置传感器进行检测,其中光电编码器、磁编码器以及旋转变压器等最常见。
采用传感器可以准确、方便地获得转子位置与速度信息,是电机控制系统设计的首选方案。
但在航空航天等一些特殊应用场合,位置传感器的应用将受到一定的限制,主要问题有:在恶劣环境下,由于温度、湿度以及机械振动等影响,使得传感器受到干扰,导致其精度降低,性能不稳定甚至无法工作;高精度、高响应的传感器价格昂贵,对于低成本控制系统而言,增加系统成本;传感器的应用增加了电机轴向尺寸和体积,在空间受限系统中无法使用。
为了解决位置传感器在一些特殊场合应用受限问题,国内外学者做了大量研究,一些无位置传感器控制方法已经被广泛研究,包括高频注入法、扩展卡尔曼滤波器、滑模观测器、全阶/降阶观测器、磁链估计法等[1-6]。
其中滑模观测器具有鲁棒性强、动态响应快、易于工程实现等诸多优点而得到了广泛关注[7-10]。
然而滑模观测器中抖振现象的存在会直接影响观测精度,为了解决抖振问题,文献[11]在滑模边界层内采用连续函数取代符号函数,从而抑制了抖振现象,但在滑模边界层内观测器的鲁棒性将无法得到保证。
文献[12]和[13]分别设计了具有变截止频率的低通滤波器和具有扩展卡尔曼滤波器结构的滤波器对观测的电机反电动势进行滤波,但在抑制抖振的同时,被观测量也将产生相位滞后与幅值的减小,因此需要对估计的转子角度进行相位和幅值补偿。
本文在分析传统滑模观测器的基础上,提出一种基于线性滑模与混合非奇异终端滑模的新型二阶滑模观测器,并对滑模控制律进行了设计,抑制了滑模固有的抖振现象。
该观测器能够避免常规滑模观测器由于低通滤波所产生的相位滞后,提高了转子位置与速度的估算精度。
利用Lyapunov方法证明了观测器的稳定性,并给出了滑模控制律参数的自适应律。
最后通过仿真和实验结果验证了该观测器的正确性和有效性。
1 永磁同步电机数学模型对于表贴式永磁同步电机,假设转子永磁磁场在气隙空间分布为正弦波,定子电枢绕组中的感应电动势也为正弦波,不计铁芯涡流与磁滞损耗,其在静止参考坐标系下的电压方程如下:其中,R 为定子电阻;L 为定子电感;eα、eβ,iα、iβ,uα、uβ分别为αβ坐标系下的绕组反电势、定子电流和定子电压。
由式(1)可得表贴式永磁同步电机在静止αβ坐标系下状态方程为:其中,。
2 二阶滑模观测器2.1 常规滑模观测器由于电机转子位置与速度信息包含在电机反电动势中,因此可构建滑模观测器对反电动势进行观测,进而估计电机转子位置与速度。
根据式(2)所示永磁同步电机的状态方程,构建常规滑模观测器如下:其中,“^”表示观测值;K= [-k1-k1]T为滑模增益矩阵,k1>0;sgn(·)为符号函数。
将式(3)与式(2)相减得到观测误差方程:其中,为定子电流观测误差,并将其作为滑模切换面,如式(5)所示。
当系统状态达到滑模切换面以后,由等效控制理论可知滑模切换面满足,则观测误差方程可简化为:由式(6)可知,电机的反电势信息被包含在符号函数中,但符号函数为不连续变化量,含有大量高频干扰,因此需要对其进行低通滤波才能得到平滑的反电势信号,经过滤波处理后的估算反电势为:其中,ωc为低通滤波器的截止频率。
通过低通滤波的反电动势将会产生相位延迟,该延迟与低通滤波器的截止频率直接相关,截止频率越低,对应固定频率的相延迟越大,实际应用中需对其进行相位补偿。
补偿后的转子位置与速度估计值为:其中,为补偿角度。
2.2 二阶滑模观测器的构建与稳定性分析对常规滑模观测器的分析可知,为了得到平滑的反电势信息,采用了低通滤波器对符号函数中抖振信号进行滤波处理,从而导致了估算转子位置的相位延迟,需要进行相位补偿。
同时由式(9)可知,估算速度由转子位置微分计算得到,将会引入大量干扰,从而影响观测精度。
为了解决常规观测器的上述问题,本文提出二阶混合非奇异终端滑模观测器,该观测器在本质上抑制了滑模固有的抖振现象,省去了低通滤波器,从而避免了观测转子位置的相位滞后,提高了观测精度。
构建新型滑模观测器如下:其中,v=[vα vβ]T为观测器控制律。
将式(10)与式(2)相减得到新型观测器的观测误差方程:由滑模控制理论可知,滑模切换面的设计将直接影响系统状态的收敛特性[14-15]。
而对于滑模观测器而言,滑模切换面是观测器设计的关键,它将决定观测值收敛到实际值的速度与方式。
因此本文基于线性滑模与混合非奇异终端滑模设计了如式(12)所示的滑模切换面。
其中,c、γ、p、q 为滑模参数,且 c>0,γ>0,p/q>1,p、q均为奇数;为定子电流观测误差,将其作为一阶线性滑模切换面;s为二阶混合非奇异终端滑模切换面。
滑模切换面确定之后,需要进一步对新型观测器(式(10))中的滑模控制律v进行设计,以保证该观测器的稳定。
本文设计滑模观测器控制律v为:其中,η、u、lg均为滑模控制律参数,且η>0,u>0。
选择Lyapunov函数为对滑模观测器的稳定性进行分析。
由Lyapunov稳定性理论可知,当式成立时满足滑模到达条件,即观测器稳定。
因此对求微分,并根据式(12)可得:其中,,且 F >0。
结合误差方程式(11),可得:进一步根据滑模控制律式(13),可得:当滑模控制律参数lg取值满足:则式(16)可进一步简化为:显然在参数lg的选取范围内所设计的滑模控制律满足滑模到达条件,能够保证该滑模观测器的稳定。
而根据滑模控制律参数lg的选取范围可设计参数自适应律如式(19)所示,其中 g>1。
2.3 转子位置与速度信息获取根据滑模控制理论可知,在控制律式(13)作用下,二阶滑模切换面s将会在有限时间内收敛于平衡点,此时滑模切换面方程式(12)为:当s收敛于平衡点以后,线性滑模变量f与进入混合非奇异终端滑模运动状态,并最终收敛到零,即满足,则新型观测器误差方程式(11)可简化为:式(21)表明电机的反电动势信息可通过滑模控制律进行观测。
同时与式(6)进行对比可知,常规滑模观测器的反电动势信息包含在引起抖振现象的符号函数中,而新型滑模观测器的反电动势信息包含在滑模控制律式(13)中,虽然滑模控制律中同样包含符号函数,但该符号函数经过了积分器的滤波环节,使得抖振现象得到有效抑制,因此,转子位置可以直接由观测的反电动势信息计算得到,不需要再进行低通滤波处理,避免了常规滑模观测器的相位滞后问题。
常规滑模观测器计算转子位置与转速的方法通常采用如式(8)和(9)所示的反正切与微分计算方法,这种方法精度不高且微分运算容易引入干扰。
为了克服上述缺点提高观测精度,本文采用如图1所示的转子位置与速度跟踪算法从观测的反电动势中解调出转子位置和速度。
图中,分别为估算转子位置与速度。
图1 转子位置与速度跟踪算法Fig.1 Rotor position and speed tracking algorithm对图1算法进行分析可知:其中,θ*re为观测反电势的相位角,k为反电势系数。
而当角度误差满足的时候,有,则式(22)可简化为:此时图1所示的跟踪算法结构等效于图2所示的锁相环结构。
转子位置误差Δθre 经过PI调节后得到估算转速,而估算转速经过积分环节得到估算转子位置。
某一时刻,若估算转子位置小于实际转子位置,则位置误差增大,经PI调节输出后的估算转速增大,进而调节估算转子位置逐渐增大,最终使其与实际转子位置相接近;若估算转子位置大于实际转子位置,分析类似。
图2 锁相环结构框图Fig.2 Structure of PLL图3为二阶混合非奇异终端滑模观测器结构框图。