关于一种管道外壁行走装置的结构设计与分析
一种蠕动式管道机器人行走机理研究
一种蠕动式管道机器人行走机理研
究
一种蠕动式管道机器人行走机理研究
蠕动式管道机器人是指在管道内采用蠕动运动的机器人,它主要通过对外面形态及内部结构的设计来实现在管道内的行走。
因此,研究蠕动式管道机器人的行走机理是至关重要的。
首先,蠕动式管道机器人的外形应该能够与管道内壁保持良好的接触,以便实现抓取效果和泵腔作用。
因此,蠕动式管道机器人的外形设计应该考虑管道内壁的形状、尺寸及空气流体的特性。
然后,由于管道内部的空气流体会造成管道机器人的前进动力,因此蠕动式管道机器人的外形设计也要考虑空气流体的特性,如气流的速度分布、气流的方向及其大小等。
其次,蠕动式管道机器人的内部结构设计应考虑机器人的动力源、控制系统及传动系统等要素。
机器人的动力源指的是机器人行走时所需要的能量来源,一般可以采用电力和声波能等作为机器人行走的动力源;控制系统是指机器人行走过程中控制机器人行走方向和行走速度的系统,一般采用电子控制系统来实现;传动系统是指将机器
人的动力转换成机器人行走的系统,一般采用电动机或液压系统来实现。
最后,蠕动式管道机器人的行走机理研究还包括仿真分析、实验研究等内容。
一般情况下,首先要进行仿真分析,以确定机器人的外形及内部结构;然后,进行实验研究,以验证机器人的行走机理及行走性能。
最后,根据实验结果,进行机器人行走机理的改进,以提高机器人的行走性能。
总之,蠕动式管道机器人行走机理研究是一项较为复杂的工作,需要考虑机器人的外形及内部结构设计,以及实验研究等内容,只有在这些方面都进行充分的研究,才能使蠕动式管道机器人得到更好的行走效果。
管道攀爬机器人结构设计及行走动力特性分析

管道攀爬机器人结构设计及行走动力特性分析一、结构设计:1.机器人主体结构:管道攀爬机器人的主体结构一般由多个可伸缩的模块组成,每个模块包括一个电机、行走轮和一个伸缩杆。
2.伸缩机构:机器人通过伸缩杆来适应不同管道尺寸。
伸缩杆一般采用多节设计,每个节段之间通过齿轮或链条进行连接,以实现伸缩功能。
3.行走轮和传动机构:机器人采用行走轮来实现在管道内的行走。
行走轮通常由橡胶材料制成,提供良好的摩擦力。
传动机构一般为电机与行走轮的传动装置,通常采用齿轮传动或链条传动。
4.控制系统:机器人的控制系统包括传感器、执行器和控制器。
传感器可以感知机器人的位置、姿态和环境条件等信息,以便进行自主导航和任务执行。
执行器包括电机和伸缩杆等组件,用于控制机器人的运动和伸缩。
控制器负责接收传感器信息,并根据预设的算法控制机器人的运动。
二、行走动力特性分析:1.爬行速度:管道攀爬机器人的爬行速度取决于行走轮的直径、电机的转速和传动机构的设计等因素。
一般来说,机器人爬行速度应该足够快,以提高任务完成效率。
2.负载能力:机器人承载工具和传感器进行任务执行,因此需要具有较大的负载能力。
负载能力的大小与机器人的结构强度和设计参数有关。
3.自稳定性:机器人在管道内行走时需要具备较好的自稳定性,以应对管道内的复杂环境。
自稳定性主要通过控制系统实现,通过传感器检测机器人的姿态和环境条件,并及时做出调整。
4.能耗与动力供应:管道攀爬机器人通常采用电池供电,因此需要考虑能耗和续航时间。
一般通过优化结构设计和控制算法,减小阻力和能耗,延长电池寿命。
5.适应性:管道攀爬机器人需要适应多种管道的尺寸和形状。
因此,其结构设计应具有一定的自适应性,能够根据管道的不同尺寸进行伸缩和调整。
综上所述,管道攀爬机器人的结构设计和行走动力特性是保证机器人能够在管道内进行任务执行的关键要素。
通过合理的结构设计和动力调节,可以使机器人具有较高的工作效率和可靠性,适应不同尺寸和形状的管道。
管道外爬行机器人的设计与仿真

管道外爬行机器人的设计与仿真管道外爬行机器人的应用场景十分广泛。
在石油、天然气等能源领域,长距离的管道运输需要定期检查,以确保无泄漏和腐蚀等问题;在城市的给排水系统中,及时发现管道的破损和堵塞对于保障居民的正常生活具有重要意义;在化工行业,管道的安全运行更是关系到生产的稳定和人员的安全。
设计一款高效的管道外爬行机器人,首先需要考虑其运动方式。
常见的运动方式包括轮式、履带式和足式。
轮式结构简单,运动速度快,但在复杂的管道表面适应性较差;履带式能够提供较好的抓地力和稳定性,但结构相对复杂,重量较大;足式机器人则具有出色的越障能力,但控制难度较高。
综合考虑各种因素,本次设计采用了轮式与履带式相结合的运动方式。
机器人的主体结构由车架、驱动装置、传动系统和控制系统等部分组成。
车架采用高强度铝合金材料,以减轻整体重量并保证足够的强度。
驱动装置选用高性能的直流电机,通过减速器将动力传递给车轮或履带。
传动系统则采用链条或齿轮传动,确保动力的有效传输。
为了使机器人能够在管道外表面稳定爬行,需要设计合适的吸附装置。
常见的吸附方式有磁吸、真空吸附和机械夹持。
磁吸方式适用于铁质管道,但对于非金属管道则无能为力;真空吸附需要保持良好的密封,在管道表面不平整时效果不佳;机械夹持则可以适应各种管道表面,但结构复杂,操作难度大。
经过分析,本次设计采用了真空吸附与磁吸相结合的方式,以提高机器人在不同管道上的适应性。
在控制系统方面,采用了基于微控制器的嵌入式系统。
通过传感器实时采集机器人的位置、速度、姿态等信息,并根据预设的控制算法进行调整。
传感器包括位移传感器、压力传感器、陀螺仪等,以确保机器人能够准确感知周围环境和自身状态。
完成机器人的设计后,接下来进行仿真分析。
仿真软件可以帮助我们在实际制造之前,对机器人的性能进行评估和优化。
首先,建立机器人的三维模型,并导入仿真软件中。
设置好管道的形状、材质和表面粗糙度等参数,以及机器人的运动参数和负载条件。
管道爬壁机器人的设计
管道爬壁机器人设计作品内容简介现在的管道机器人在竖直或者是水平方向都很好的实现了检测与清理功能。
但至今还没有管道产品在复杂的管道中很好的工作。
为此我们设计了这款管道爬壁机器人,它既可以在水平管道中很好的工作还可以在竖直管道中完成工作,能够自如的在水平竖直交叉的复杂管道中完成检测,清理等工作。
该产品的主题结构为车体结构,在水平方向依靠车载力运动,在车体上安装有四个机械手臂,在机械手臂的前端安装有吸盘跟电磁铁,在塑料管道中依靠吸盘在竖直方向上运动,在铁质管道上利用电磁铁的磁力和机械手臂的交叉前进实现竖直方向的运动。
该作品灵活多变,不但可以适应复杂的管道还能够进行多样的工作。
我们依靠机械臂的灵活度与吸盘,电磁铁的吸力来实现该产品的爬壁功能,在水平方向上利用最传统的智能车作为动力,这样的设计完全可以满足水平方向与竖直方向的灵活转变,实现复杂管道的自由穿梭,进而可以让该机器人更好的实现其检测与清理功能。
该管道爬行机器人实现远程电脑控制,所得数据通过反馈处理使机器人能够完成各项做业。
一、研制背景及意义1、随着社会的快速发展,国家生产水平不断提高,产品更新也越来越快。
管道运输在我国运用比较普遍,但管道长期处在压力大的恶劣环境中,受到水油混合物、硫化氢等有害气体的腐蚀。
这些管道受腐后,管壁变薄,容易产生裂缝,造成漏油、漏气的问题,存在重大安全隐患和经济损失。
在管道广泛使用的今天,管道的检测、清理、维护成了一个亟待解决的问题。
但是管道的封闭性和工作环境决定了这项工作的艰难。
时至今日,虽然经过各国学者的努力,已经有各种各样的机器人,但是他们大都存在这样或那样的问题,而且功能不够强大。
2、人民对管道清洁机械的要求是不仅科技含量要高,而且还要绿色、节能、环保。
能够满足不同类型管道的检测、维护、清理等要求。
3、管道爬行机器人的研究更好地为管道的检测、维护、清理提供了新的技术手段,这种技术更好的提高了管道监测的准确性和管道清理的安全性,也便于管道工程管理维护人员制定维护方案,清除管道垃圾防止堵塞,事前消除管道的安全隐患,从而节约大量的维修费用,降低管道维护成本,保障工业生产和人民生活及财产安全。
管道攀爬机器人结构设计及行走动力特性分析

虽然串联机器人动力学特性及结构优化设计已经取得了许多重要成果,但仍 然存在许多研究方向值得进一步探索。例如,如何建立更加精确、高效的动力学 模型,以满足实时控制的需求;如何将新型优化算法应用于结构优化设计中,以 获得更好的优化效果;如何提高机器人的柔性和自适应性,以适应更加复杂和动 态的环境等。
此外,随着和机器学习技术的快速发展,这些技术也开始被应用于串联机器 人的设计和控制中。例如,通过机器学习方法,可以实现对机器人的自适应控制、 故障诊断和维护等。这为串联机器人的进一步发展提供了新的机遇和挑战。
因此,在未来的研究中,可以综合考虑这两种方法,设计一种混合式的控制 策略,以实现机器人在不同条件下的稳定攀爬。此外,还可以进一步研究机器人 感知和决策等方面的技术,以提高机器人在复杂环境中的自主能力。
感谢观看
控制算法
管道攀爬机器人的控制算法包括位姿估计、轨迹跟踪等。位姿估计是指对机 器人在管道中的位置和姿态进行估计,通过对传感器数据的处理和分析来实现。 轨迹跟踪是指根据位姿估计结果,控制机器人按照预设的轨迹行走,通过对电机 进行控制来实现。
在控制算法的设计过程中,需要考虑机器人的作业效率和安全性。为了提高 作业效率,需要缩短位姿估计的时间,提高轨迹跟踪的精度。为了确保安全性, 需要加入防抖动和异常情况处理等功能,以避免机器人在行走过程中出现问题。
爬杆机器人是一种能够在垂直杆上自主攀爬的机器人,这种机器人在电力线 路巡检、救援、建筑等领域有广泛的应用前景。然而,要实现机器人的自主攀爬, 需要解决一系列的关键问题,包括对环境的感知、运动规划、控制策略等方面。 在本次演示中,我们将重点探讨爬杆机器人的攀爬控制。
机器人攀爬控制是实现自主攀爬的关键技术之一。在攀爬过程中,机器人需 要通过对环境的感知,获取关于杆子位置、姿态等信息,再根据这些信息调整自 身的运动状态,实现稳定的攀爬。在这个过程中,控制算法起着至关重要的作用。
毕业设计(论文)--管道机器人行走机构设计[管理资料]
![毕业设计(论文)--管道机器人行走机构设计[管理资料]](https://img.taocdn.com/s3/m/990d4cecfad6195f302ba6ee.png)
毕业设计(论文)--管道机器人行走机构设计摘要管道运输在我国运用比较普遍,管道长期处于压力大的恶劣环境中,受到水、油混合物、硫化氢等有害气体的腐蚀。
这些管道受蚀后,管壁变薄,容易产生裂缝,造成漏油的问题,存在重大安全生产隐患和济济损失。
因此研究工程应用中的管道机器人具有很高的实用价值和学术价值。
根据这些问题,我们设计一种新的行走机构并分析了其总体机械结构。
本文进一步介绍了当前国内外的管道机器人的发展现状并提出了一种新的管内行走机构。
它利用一个电机同时驱动均布在机架上并与管内壁用弹簧力相封闭的六个行进轮,从而实现了可以轴向直进全驱动的管内行走。
接着本论文重点对直进轮式管道机器人的运动机理和运动特征进行了分析和介绍。
根据管道机器人的设计要求选择电机,介绍了电机选择过程,对其中关键的机械部件如蜗轮蜗杆传动部件、齿轮等进行了设计。
该机器人具有较大的承载能力,可以在较高的速度下实现连续移动,由于该机构采用弹性装置支撑,所以该机构的管径适应性增大,是一种具有实用价值的移动机构形式……关键词:管道机器人;行走机构;弹性装置AbstractIn our country, pipeline transportation is very universal, and pipeline is in high pressure circumstance. Because pipes are corroded by the water, the oil mixture, the hydrogen sulfide, the noxious gas corrosion and so on. When these pipelines were corroded, their walls would become thin and result in cracks and oil leak, there is safety incipient fault in production and economic loss. So the key technology and further research development trend of in-pipe robot are discussed.According to these problems, we designed a new mobile mechanism and analyzed its machine structure. In this paper, the current states of in-pipe robot are described and a new type of mobile robot mechanism moving in pipe is presented. It uses two motor to drive six wheels which distribute symmetrically on the robot body and a wheels are pushed on the wall of pipe by spring force,so that the six driving wheels move along the axis of pipe. This kind of mobile robot mechanism has high efficiency,simple structure and easy to manufacture and to mount.Then the papers focus on direct pipeline into the wheeled robot's movement and the movement of an analysis and presentation. According to the pipeline robot design requirements choose Motors, introduced the motor selection process, of which the key mechanical components such as worm transmission parts, such as a gear design. The robot with the larger carrying capacity, can achieve higher speeds for mobile, as the agenciesadopt a flexible device support, the agency increased the diameter of adaptability, is a kind of practical value in the form of body movement.Keywords: In-pipe Robot; Mobile mechanism; Flexible device摘要IAbstract II1绪论 1128102管道机器人总体方案设计1111式 1112式 13173管道机器人的移动机构分析与设计181819动机构的原理19动机构的特点1921由度分析21度分析21析时的一些假设条件23构前进时的受力分析2427机的选择27位的设计计算29设计31选择31簧的设计3232径大小的影响32道机器人适用的管道口径334直进轮式管道机器人实体建模34343536375总结 38参考文献40致谢41附录421 绪论管道作为一种有效的物料输送手段,在一般工业、核设施、石油天然气、军事装备等领域中都得到广泛的应用,本题目要求设计一个结构紧凑的管道内行走装置,提高驱动效率。
管道爬行器的设计与分析(全)
管道爬行器的研究与设计
学生:XX
指导教师:XXX
工程领域:机械工程
论文主审人:XXX
XXXXXX
2013 年 9 月
毕业设计(论文)任务书
专业班级姓名 XX
一、课题名称:管道爬行器的研究与设计
二、主要技术指标:
1、爬行器爬行最小内径为450mm,爬行最大内径1100mm
2、机身内径为150mm,外径为200mm机壁厚度最小处为10mm
3、管道爬行满园:400-1000MM
三、工作内容和要求:
1、爬行器总装配图 A0 1 张;相当零件图不少于10张,大小A4-A2之间
2、总电控系统图 A1 1 张
3、全套SolidWorks造型三维图
4、设计说明书 1 份,设计说明书1.5万字以上,分析、计算准确详尽,格式符合“毕业设计
撰写规范”
5、参考文献(不包括教科书)15篇以上,含一篇外文文献并译成中文(5千字)
四、主要参考文献:
1、齐占庆.机床电气控制技术[M].机械工业出版社,1994
2、杨天明.电机与拖动[M].北京大学出版社,2006
3、电机工程手册[M].机械工业出版社,1996
4、李国厚,杨青杰.PLC原理与应用设计[M].化学工业出版社,2005
5、王永章.数控技术[M].高等教育出版社,2001
6、黄立培.电动机控制[M].清华大学出版社,2003
学生(签名)年月日
指导教师(签名)年月日
教研室主任(签名)年月日
系主任(签名)年月日
毕业设计(论文)开题报告。
外管式爬壁机器人的设计
外管式爬壁机器人的设计关键词:外管机器人,爬管机器人,管道检测,机构设计植物中的管道,包括发电厂和化工厂,需要稳定的保养,因为管道内流体的腐蚀和磨损和外部环境的发生。
但是,作为检查管道的过程不是自动的,手工检查是一个非常耗时的工作。
因此,为了减少检查时间和成本,我们提出了管道爬壁机器人管道检测。
所提出的机器人是适用于工厂的操作,因为这个机器人是一个出管式,它允许它移动以外的管道。
并且机器人可以覆盖直的和弯曲的长度可调的独立控制和驱动轮在不同直径的管道。
该机器人的机构和控制系统的设计已经提出并且所推荐的机器人的可行性已被攀登实验证明。
1.简介各种植物,包括核电厂,在其结构体系中使用各种管道。
由于在管道内的流体和外部环境存在的连续腐蚀和磨损,管道的检查对植物和设备的维护是至关重要的。
作为检验过程,通常是无损检测(无损检测),因此,管道是不是自动化的,这样的手动测试通常是非常耗时的任务,通常由设置检查位置,安装的无损检测设备,释放的无损检测设备我的管道,并改变检查位置。
因此这个过程的自动化有一个稳定的迫切需求。
然而,大多数的原型已经是沿管道内移动的管道类型。
使用这些设备如果不先关闭工厂是困难的。
因此,我们提出了一种可以克服管道机器人模型限制的外管式爬壁机器人。
一些研究小组报告了管式机器人。
基姆等人。
提出了一种尺蠖式巡检机器人重加压水反应堆核电站。
但是这个机器人是用于小型管道并且它的最大移动速度由继承的限制它的结构和移动基于尺蠖原理限制到1.5毫米/秒。
和二汤川,等人报道了磁轮式管道机器人可避免对管法兰,但无法移动沿遏制管道。
并联机器人是由日本坂等人提出的。
这个机器人有一个圆形的扫描轨道,可以沿着弯曲的管道移动。
但它不能主动覆盖管道的不同半径。
由于这项研究的最终目标是开发一个机器人包括直管和弯管和覆盖范围在10英寸(254毫米)和30英寸(762毫米)之间的直径,我们提出了一个管式管道机器人能够沿着直线和各种管径管道弯曲。
永磁轮式管外攀爬机器人结构设计与力学分析
2023年第47卷第10期Journal of Mechanical Transmission永磁轮式管外攀爬机器人结构设计与力学分析李浩男1,2侯宇1,2蒋怡蔚2,3孙伟2,3(1 武汉科技大学冶金装备及其控制教育部重点实验室,湖北武汉430081)(2 武汉科技大学机械传动与制造工程湖北省重点实验室,湖北武汉430065)(3 武汉科技大学精密制造研究院,湖北武汉430081)摘要在石油、化工等行业中,大型管道长期运输腐蚀性油气资源,需要进行定期检测。
针对这一应用场景,提出了一种能够在管道外壁稳定行走且具有良好越障能力的永磁轮式机器人。
该机器人采用六轮摇臂式移动机构配以永磁轮,搭载检测设备后可以代替人工进行更加安全高效的检测。
根据机器人在管道上稳定吸附的力平衡条件,计算出机器人所需的最小磁力,从而确定机器人运动所需的驱动力;通过Maxwell仿真建立永磁轮的磁力分析模型,设计并确定了永磁轮的尺寸;最后,基于Adams软件进行机器人的运动学仿真,验证了机器人的越障能力。
关键词永磁吸附轮式机器人力学分析越障能力Structural Design and Mechanical Analysis of Permanent Magnet WheeledClimbing Robots on an Outer Wall of PipelinesLi Haonan1,2Hou Yu1,2Jiang Yiwei2,3Sun Wei2,3(1 Key Laboratory of Metallurgical Equipment and Control Technology of the Ministry of Education, Wuhan University of Scienceand Technology, Wuhan 430081, China)(2 Hubei Key Laboratory of Mechanical Transmission and Manufacturing Engineering, Wuhan University of Science andTechnology, Wuhan 430065, China)(3 Precision Manufacturing Institute, Wuhan University of Science and Technology, Wuhan 430081, China)Abstract Large pipelines with long term transport of oil and gas resources need to be tested in petrochem⁃ical industry nowadays. In this case, a robot which adopts a six-wheel rocker-bogie mobile mechanism with the permanent magnet wheel is proposed to realize the function of the stability to walk on the outer wall and good ability to climb over the obstacle, in order to replace manual inspection of pipelines in a safer and more efficient way when it is equipped with the testing equipment. To determine the driving force required, the minimum mag⁃netic force meeting the force balance condition of stable adsorption of the robot needs to be calculated first; the size of the permanent magnet wheel is designed and determined based on the magnetic force analysis model of the permanent magnet wheel established by Maxwell. Kinematics simulation of the robot based on Adams soft⁃ware is carried out and the ability to climb over the obstacle is verified.Key words Permanent magnetic Wheeled robot Mechanical analysis Obstacle climbing ability0 引言随着我国经济的快速发展,大型管道在石油、化工等行业的应用越来越多。
管道爬行器的研究与设计
管道爬行器的研究与设计1 绪论随着社会的发展和人民生活水平的提高,天然气管道以及各种输送管道的应用越来越多。
在我国及世界各个国家内,由于地形的限制和土地资源的有限,在地下都埋设了很多的输送管道,例如,一方面天然气管道、石油管道等,在埋有管道的地面上都已经建成了很多的建筑物、公路等,给管道的维修和维护造成了很大的困难。
当这些管道由于某些原因造成了泄露、堵塞等问题时,人们普通的做法是挖开道路进行维修,有些时候如果不能准确判断泄露和堵塞的具体位置时,会浪费很多的时间和精力,同时降低了工作效率[7]。
另一方面石油、天然气、化工、电力、冶金等工业的管道工程大多采用焊接管路。
为了保证焊接管路的焊接质量和运行安全,管道工程都要对焊缝进行检测,检测焊接部位是否存在虚焊、漏焊、伤痕等焊接缺陷。
常用的焊缝检测方法是采用无损检测,如超声、射线、涡流等。
对于管路检测,则大多采用管道内爬行探伤检验设备(简称爬行器) 对焊缝进行射线检测。
这类爬行器由于受管道尺寸的限制,大多结构十分紧凑。
在检测过程中,爬行器在其控制系统的控制下,可连续对同一管道不同位置上的焊缝质量进行检验。
考虑管道焊缝检测的效率,常常当管道焊接具有一定长度之后,才集中对管道进行检测。
如果一次要检测的管道比较长,爬行器的控制系统应采用车载式布置。
使用时,通过外部的控制器对爬行器上的控制系统发出指令,决定爬行器的工作状态。
随着机电一体化技术的发展,以及机器人技术的发展和管道测试等技术的进一步发展,相互之间的渗透程度越来越深,管道爬行机器人是在狭窄空间中进行精密操作、检测或作业的机器人系统。
其中机器人的作业环境一般是危险的。
火力发电厂、核电厂、化工厂、民用建筑等用到各种各小管道,其安全使用需要定期检修。
但由于窄小空间的限制,自动维修存在一定难度。
仅以核电站为例,检查时工人劳动条件恶劣。
因此管道内机器人化自动检查技术的研究与应用十分必要。
人们不再为了维修、维护管道时挖开道路,节省了大量的人力,物力和财力。
一种新型管道行走装置
新型管道行走装置
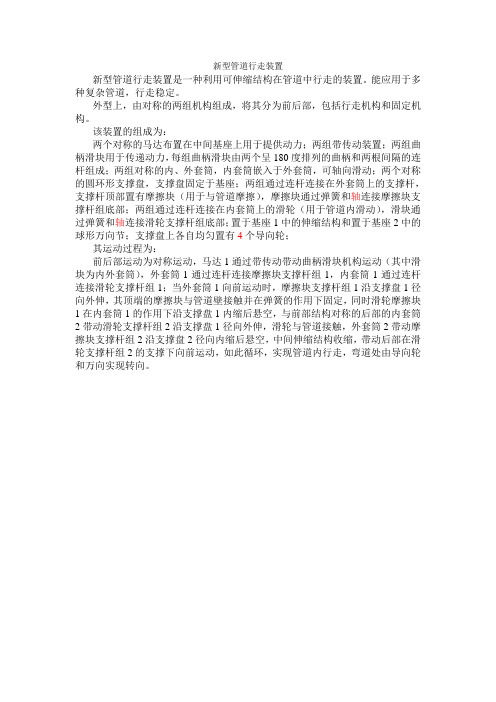
新型管道行走装置是一种利用可伸缩结构在管道中行走的装置。
能应用于多种复杂管道,行走稳定。
外型上,由对称的两组机构组成,将其分为前后部,包括行走机构和固定机构。
该装置的组成为:
两个对称的马达布置在中间基座上用于提供动力;两组带传动装置;两组曲柄滑块用于传递动力,每组曲柄滑块由两个呈180度排列的曲柄和两根间隔的连杆组成;两组对称的内、外套筒,内套筒嵌入于外套筒,可轴向滑动;两个对称的圆环形支撑盘,支撑盘固定于基座;两组通过连杆连接在外套筒上的支撑杆,支撑杆顶部置有摩擦块(用于与管道摩擦),摩擦块通过弹簧和轴连接摩擦块支撑杆组底部;两组通过连杆连接在内套筒上的滑轮(用于管道内滑动),滑块通过弹簧和轴连接滑轮支撑杆组底部;置于基座1中的伸缩结构和置于基座2中的球形万向节;支撑盘上各自均匀置有4个导向轮;
其运动过程为:
前后部运动为对称运动,马达1通过带传动带动曲柄滑块机构运动(其中滑块为内外套筒),外套筒1通过连杆连接摩擦块支撑杆组1,内套筒1通过连杆连接滑轮支撑杆组1;当外套筒1向前运动时,摩擦块支撑杆组1沿支撑盘1径向外伸,其顶端的摩擦块与管道壁接触并在弹簧的作用下固定,同时滑轮摩擦块1在内套筒1的作用下沿支撑盘1内缩后悬空,与前部结构对称的后部的内套筒2带动滑轮支撑杆组2沿支撑盘1径向外伸,滑轮与管道接触,外套筒2带动摩擦块支撑杆组2沿支撑盘2径向内缩后悬空,中间伸缩结构收缩,带动后部在滑轮支撑杆组2的支撑下向前运动,如此循环,实现管道内行走,弯道处由导向轮和万向实现转向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于一种管道外壁行走装置的结构设计与分析
发表时间:2018-11-22T17:08:21.807Z 来源:《成长读本》2018年11月总第36期作者:陆月朋
[导读] 本文结合管道喷涂、除锈及监测等方面的具体要求,设计了一种用于管道外壁的多功能管道行走装置;依据各种需要,在此装置上安装其它工作装置,以此来实现在管道上行走与工作的目的。
陆月朋
淮南联合大学机电系安徽·淮南 232038
摘要:本文结合管道喷涂、除锈及监测等方面的具体要求,设计了一种用于管道外壁的多功能管道行走装置;依据各种需要,在此装置上安装其它工作装置,以此来实现在管道上行走与工作的目的。
关键词:管道外壁;行走装置;结构设计
基金项目:安徽省教育厅重点科学研究项目《管道外壁行走装置系统设计研究》,项目编号KJ2017A581。
在各种工程应用需求的驱动下,各种规格与种类的管材在此领域中得到广泛应用,而随着应用的日趋普遍,腐蚀、生锈等问题越发突出,对管道安全造成了较大影响与威胁。
在现实应用中,怎样将管道检测、着色喷涂及外壁除锈维护等问题解决掉,乃是当前研究的重点与热点。
现阶段,已出现许多用于管道内壁行走的装置,而外壁行走维护装置却比较少,本文根据现实需要及技术支持,探讨了一种新型的管道外壁行走装置,对其结构进行了设计。
1.调心机构设计
当装置行走于管道上时,其类型有如下几种:电磁驱动式、履带式及轮式等。
针对履带式来讲,其行走于管外,存在几何层面的不适用,且较难行走于圆形管道上。
现阶段,针对管外行走装置来讲,其多采用轮式的行走方式,本设计即为轮式。
如果装置行走的管道存在直径上的差异,那么需要管道与装置处于接触状态的部分,能够可调节,以便在各种直径的管道上,装置均能以最大姿态与管道接触。
若接触不佳,那么动力部分便难以体现其动力。
如果管道与装置之间难以达到同轴度,那么针对此时的装置来讲,其在管道上行走便会出现偏离,若偏离比较严重,那么会造成管道与装置之间的摩擦,会对装置行走造成阻碍。
此外,若管道的同轴度与装置之间难以达到既定要求,那么在检测管道时,最终结果便会出现偏离,在对管道实施喷涂及除锈操作时,工作机便难以达到均衡化的工作效果。
所以,为使管道中心与装置间能够达到理想的重合度,要求在装置当中有能够发挥调节效果的机构,即调心机构。
结构方案为:
与管道直接接触的即为行走轮。
在轮支架上,将导向螺栓穿入,此螺栓除了能够发挥支撑作用外,还能对螺母进行调节,达到调节轮子伸缩量的目的,适应轮子在各种直径管道上,轮均能与管道之间有良好的接触,使装置使用范围得到扩大。
针对调节弹簧来讲,其乃是整个装置的核心部件,其整个装置均有若干组此种弹簧来提供支撑,通过对调节螺栓向下的伸出量进行调节,来达到施压于调节板的目的,如此一来,便能够对弹簧的松紧度进行适当调节,使管道与行走轮之间有较好的接触。
而对于行走轮来讲,其对管道的压力大小,主要借助弹簧组来进行调节。
2.动力机构设计
针对此装置的动力部分来讲,采取的是典型的电机驱动式;针对主动部而言,其乃是整个行走装置架构当中的重要构成,其结构与调心机构相同,只要将一组电机安装在行走轮上便可。
若将对电机的保护作用考虑在内,可以将一联轴器安装在行走轮轴与电机轴之间。
其结构方案为:当前的机器人或管道行走装置的用途为管道外壁除锈、管道外壁喷涂及管道监测等。
当前,多围绕上述用途来开展设计,将多种功能有机整合在一起,以此来最大程度提升装置的实用性与通用性。
3.整体设计方案
上述分析已对两个主要机构所对应的结构方案进行了明确,即调心机构与主动部分,依据工作要求的差异性,结合装置适用的管道类型(水平圆形直管道),对装置的结构加以明确。
即本装置所选用的是“2+1”式布置行走轮形式,除此之外,还有另外一种布置方式,即“1+2”式。
针对这两种形式来讲,其对装置定心均有益处,而在具体的调心机构数量上,均采用3个,之所以要这样设计,主要是因为有过多的行走轮数量,受此影响,装置的总体重量会增加,若过少,会降低装置的稳定性。
所以,用3个行走轮,且进行均匀布置,这样更为合理与实用。
针对这两种布置方式来讲,尽管均能起到较好的调心能力,但在现实工作当中,若将各种外界因素考虑在内,这两种方式均有局限性与缺陷。
将两方式框架下的行走装置进行简化,并对其逐一开展受力分析,在“2+1”式当中,如果装置处于静止状态,那么各个调心机构所对应的弹簧会呈现出不同的受力情况。
而在“1+2”式当中,如果装置始终处于静止状态,那么各个调心机构弹簧也会有不同的受力。
由此可知,在相同预紧情况下,在上述两种布置方式中,针对处于上部的调心机构,其有着相同的弹簧弹力,而处于下方的调心机,其也有着相同的弹簧弹力。
也就是说,上述两种情况有着相同的受力情况,因此,经系统化分析,最终选择“2+1”式的布置调心机构。
4.结语
综上,依据现实情况及工作需要,给出了动力部分与调心机构的结构方案,而通过开展受力、稳定性等分析,对动力部分与调心机构的分布方式予以明确,最终对调心机构选择了“2+1”式的布置方式。
针对此装置来讲,其在监测铁磁性管道缺陷方面尤为适用,在对外壁进行除锈、着色喷涂等操作时,效能突出且使用方便。
参考文献:
[1]贾朝川, 杨婷, 符茂胜. 管外爬行机器人及其控制系统设计[J]. 皖西学院学报, 2014, 30(2):20-23.
[2]张玉峰, 姜生元, 李建永,等. 介质流压差驱动式管道机器人的驱动、调速原理分析及结构设计[J]. 吉林化工学院学报, 2009, 26(2):85-88. 作者简介:陆月朋(1984- )女,安徽省淮南,硕士研究生,淮南联合大学讲师,主要研究方向:电力电子与电力传动教学与研究。