空间任意力系的简化结果分析
理论力学L4-4 空间力系简化
c ) 一般主矢和主矩矢既不平行也不垂直 由共点矢量知,它们在同一平面内, 假设两矢量正向夹角为α。 ' FR 1) 将 M O分解为垂直于 ' ' ' 的 及平行于 F M R MO MO O " 的 MO , ' ' O M O 的大小: " FR ' MO M O M O sin
' b) 若主矢平行于主矩:FR // M o
O
MO
' 由一个力和一个力偶(且力 FR 垂直于力偶作用面)组成的
力系,称为力螺旋。 力和力偶都是基本力学量, 力螺旋不能再简化。
力偶矩矢与力矢同方向的称为右螺旋(力偶的转 向与力的方向符合右手关系);反之称左螺旋。 但一般主矢和主矩矢既不平行也不垂直。
§4-4 空间任意力系向一点简化
一、空间任意力系向一点简化 与平面任意力系向一点简化相似,空间任意力 系也是利用力的平移定理将各力平移到简化中 心 O 处,并附加矢量表示的空间力偶,则原力 系与空间汇交力系+空间力偶系等效。
MO m m1 n
F2 F’2
F’R
O
F’n
Fn
F’1 m2
F 又由于力偶矩矢是自由矢量,再将平行于 的 R '' 力偶矩矢 M o 平行移动与FR 重合,成为力螺旋。 一般情况下,空间力系简化结果是一个力螺旋。
约束类型
约束反力
数量
空 间 约 束 类 型 和 约 束 反 力
3
4
5 6
MO
F’R
对于空间汇交力系的合 ' 力FR :
O
' FR 等于该力系各力的矢量和, 称其为该力系的主矢; 对于空间力偶系的合力偶,其力偶矩矢 M O等于 各附加力偶矩的矢量和,也是力系中各力对点O 力矩矢的矢量和: MO mi mO ( Fi ) 称为该力系对简化中心O点的主矩。
理论力学(大学)课件8.1 空间任意力系向一点的简化及结果分析
空间任意力系及重心的计算
c. 简化为合力偶
⑤ FR′= 0, MO≠0
一个合力偶 与简化中心无关。 d. 平衡
⑥ FR′= 0, MO= 0
平衡
平面任意力系简化的最后结果
只能是合力、合力偶、平衡三种情况,不可能出现力螺旋。
1、空间任意力系向一点的简化 及结果分析
空间任意力系及重心的计算
中心轴过简化中心的力螺旋
力螺旋 由一个力和一个力偶组成的力系, 并且力垂直于力 偶的作用面。
MO O F'R
F'R O
右螺旋
F'R O
F'R O
MO
左螺旋
1、空间任意力系向一点的简化 及结果分析
空间任意力系及重心的计算
钻头钻孔时施加的力螺旋
1、空间任意力系向一点的简化 及结果分析
空间任意力系及重心的计算
å å å 方向 cos(FR¢ , i) =
Fix FR¢
cos(FR¢ , j) =
Fix FR¢
cos(FR¢ , k) =
Fiz FR¢
作用点: 一般令其作用于简化中心上
空间任意力系及重心的计算
空间力偶系的合力偶矩
å å MO = Mi = MO (Fi )
主矩
由力对点的矩与力对轴的矩的关系,有
1、空间任意力系向一点的简化 及结果分析
空间汇交力系与空间力偶系等效代替一空间任意力系.
空间任意力系及重心的计算
汇交力系的合力
FR¢ = å Fi = å Fxi + å Fy j + å Fzk
主矢
F1¢
M2
M1
FR¢ F2¢
Fn¢ M n
材料力学 第2章 力系简化

而合力的作用点即平行力系的中心:
n
xC
lim
n
Fi xi
i 1 n
l
q( x) xdx
0 l
lim
n
i 1
Fi
0 q(x)dx
分布力对点A之矩
分布力包围的面积
结论:分布力的合力的大小等于分布力载荷图的面积,合
力的作用线通过载荷图的形心。
2.2 物体的重心、质心和形心
例2-5 如图所示,已知q、l, 求分布力对A点之矩。
2.2 物体的重心、质心和形心
xC
ΣFi xi ΣFi
,yC
ΣFi yi ΣFi
,zC
ΣFi zi ΣFi
3、平行力系中心的性质
平行力系的中心位置只与各平行力的大小和作用点的 位置有关,与平行力的方向无关。
2.2 物体的重心、质心和形心
二、物体的重心、质心和形心
1、重心
n个小体积ΔVi
坐标xi、yi、zi
(2)实验测定方法 悬挂法
称重法
l
A
C
B
xC G
FNB
二力平衡 两次悬挂
2.2 物体的重心、质心和形心
三、分布力
工程上存在大量分布力的情况,通常需要确定这些分布力
的合力的大小及其合力作用线的位置。对于图示的线分布力,
可以视为由无穷个集中力所构成的平行力系,
其合力的大小:FR
l
q ( x)dx
0
FP1 450kN,FP2 200kN
F1 300kN ,F2 70kN
求:
(1)力系向点 O 简化的结果;
(2)力系简化的最终结果。
2.1 力系简化
解:(1)确定简化中心为O点
空间任意力系
FC
最大载重Pmax是多少。
Q FB
P
D
解: 取起重机为研究对象
A
B,C
My(F)0, FAaco3s0Qa3co3s0Pclos0
MC'x(F)0,
a FA2
FBaQa2P(a2lsin)0
y C
x’
Fz 0, FAFBFCPQ0
A
ED
x
解得: FA=19.3kN, FB=57.3kN, FC=43.4kN
d O1
O
MO MO cos MO MO sin
d MO MO sin
FR
FR
一般情形下空间任意力系可合成为力螺旋
(4) 空间任意力系平衡的情形
● F′R=0,MO=0
2019/11/15
原力系平衡
内容回顾
空间力系的简化与合成
主矢
主矩
最后结果
说
明
FR′ = 0
MO = 0 MO≠0
§5-5 空间任意力系的平衡条件及其应用
1、平衡条件及平衡方程:
平衡条件:
由平衡力系定理可知,空间一般力系平衡的充要条件:力 系的主矢和对任一点的主矩都等于零,即:
平衡方程:
FR Fi 0
M O M O i 0
由主矢与主矩的计算式,有
F R (F x F x i )0 2 i, (F F yy ) i2 i0 ,(F F zz i )i2 0
② 空间任意力系的平衡条件及其应用;
2019/11/15
§5-4 空间任意力系的简化
1. 空间力线平移定理
作用于刚体的力 F 可等效地平移到刚体上的任一点O, 但须附加一力偶,此附加力偶矩 矢M 等于原力对平移点O 的力矩矢MO(F)。
空间任意力系的简化结果分析
FT
6 P 100 6
6N (拉力)
Mil1 0
FAx 4 FT1
4 20 20
FAx
30பைடு நூலகம்6
FT
2 100N 20
Mil2 0
FAx 4 FAy 2 0
FAy 2FAx 200 N
z
E FAz
2m
FAx
A
0时,空间力系为平衡力系
7
§3–2 空间力系的平衡
平衡力系所要满足的条件称为力系的平衡条件。
1.空间力系的平衡条件
任意空间力系平衡的充要条件是:力系的主矢 定点O的主矩 M O 全为零。
FR
和对任一确
即
n
FR Fi 0
i 1
n
(7.1)
M O M O (Fi ) 0
sin BC
42 32
0.8944
AB
42 32 2.52
cos 0.4472
sin CD
4
0.8
BC
42 32
cos BD
3
0.6
BC
42 32
z 4m
600
F2
F1
F3
x
Fx F sin cos 1500 0.8944 0.6 805N
3
主矢和主矩的计算
主矢—通过投影法
先计算得到主矢在 各轴上的投影
根据它们,可得到 主矢的大小和方向
n
FRx
Fxi
i 1
n
FRy
第二章力系的简化

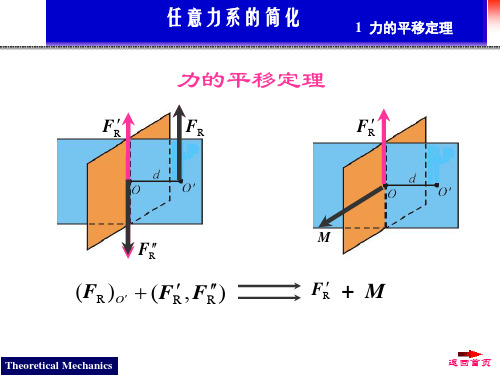
一、力的平移定理
M= MB(FA)=FA·a
FA
A B
FA
A
FB
a
B
FB´
M
A
FB
B
作用在刚体上的力,可以等效平移到刚体上任一指 定点,但必须在该力和指定点所确定的平面内附加一 力偶,附加力偶的力偶矩等于原力对指定点的矩。
注意:只有在研究力的运动效应时,力才能平行移动。
研究变形效应时一般是不能移动的。
FR MO O
FR FR
d
O
A
FR
d
O
A
主矢与主矩垂直,FR
FR M
可简化为一个合力
HOHAI UNIVERSITY ENGINEERING MECHANICS
(a) FR ⊥MO
表明FR与MO在同一平面,即共面
共面的力与力偶合成一个力。 FR
合力为F‘R,等于原力的合力FR
O
MO
作用线过新的简化中心
练习1:确定图示力系的合力大小及作用线位置。
z
4kN
6kN
2m
12kN 3m
y
Ox
x y FR Fy 0
Miy 0
Mix 0
解:
该力系为空间平行力 系,各力指向一致,可知 该力系简化为一个铅垂向 下的力。
FR 22kN
x 12 3 1.636m 22
y 6 2 0.545m 22
空间汇交力系
平面汇交力系
二、力偶系
平面力系
空间力系
HOHAI UNIVERSITY ENGINEERING MECHANICS
HOHAI UNIVERSITY ENGINEERING MECHANICS
静力学各知识点归纳

力的作用点。
(在力的作用下,任意两静力学各知识点总结1. 静力学是研究物体在力系作用下的平衡规律的科学。
2. 力的三要素:(1)力的大小;(2)力的方向;(3)3. 力的效应:(1)外效应——改变物体运动状态的效应4.刚体:在外界任何作用下形状和大小都始终保持不变的物体。
点间的距离保持不变的物体)5.一个物体能否视为刚体,不仅取决于变形的大小,而且和问题本身的要求有关。
6.力:物体间相互的机械作用,这种作用使物体的机械运动状态发生变化。
7.力系:作用在物体上的一群力。
(同一物体)8.如果一个力系作用于物体的效果与另一个力系作用于该物体的效果相同,这两个力系 互为等效力系。
9.不受外力作用的物体可称其为受零力系作用。
一个力系如果与零力系作用等效,则该力系称为平衡力系。
10. 力应以矢量表示。
用 F 表示力矢量,用 F 表示力的大小。
在国际单位制中,力的单位是N 或Kn 。
(2)内效应一一引起物体形变的效应第一章•静力学公理F R = F I +F 2公理1:力的平行四边形法则作用在物体上同一点的两个力,可以合成为一个合力。
合力的作用点也在该点,合力的大小和方向,由这两个力为边构成的平行四边形的对角线确定。
公理2 :二力平衡条件作用在刚体上的两个力,使刚体保持平衡的必要和充分条件是:这两个力的大小相 等,方向相反,且作用在同一直线上。
公理3 :加减平衡力系原则在已知力系上加上或减去任意的平衡力系,与原力系对刚体的作用等效。
推理1 :作用于刚体上某点的力,可以沿着它的作用线移到刚体内任意一点,并不改变该推理2 :三力平衡汇交定理作用于刚体上三个相互平衡的力,若其中两个力的作用线汇交于一点,则此三力必在同一平面内,且第三个力的作用线通过汇交点。
4.线,5. 柔索类约束:绳索对物体的约束力,作用在接触点, ,沿着同一直线,公理4 :作用力与反作用力总是同时存在,两力的大小相等、方向相反、分别作用在两个相互作用的物体上。
4任意力系的简化
Theoretical Mechanics
返回首页
任意力系的简化
3 力系的简化结果分析
1.力系简化为合力偶M
F'R = 0,MO≠0 力偶矩M = MO = ∑MO(Fi) 其大小、方向与简化中心无关
由此可知:对于沿直线分布的垂直分布载荷来说,其合力
的大小等于分布载荷图形的面积,合力作用线则通过该图形的
形心。
Theoretical Mechanics
返回首页
平行力系与重心
1 平行力系的简化 ·平行力系的中 心
例 :求图示分布载荷的合力及对A点之矩。
解:将分布载荷图形分成两个三 角形,每个三角形载荷合力大小 分别为 1 1
2 力系向一点简化· 主矢和主矩
n
n
MO
称为该力系的主矢 MO称为该力系对简化中心O的主矩。
FR
Theoretical Mechanics
返回首页
任意力系的简化
2 力系向一点简化· 主矢和主矩
结
论
任意力系向一点简化的结果为作用于该点的一个力和一
个力偶。这个力是力系的主矢,等于力系中各力的矢量和,
任意力系的简化
1 力的平移定理
力的平移定理
FR FR FR
FR
M
, FR ) (FR )O ( FR
Theoretical Mechanics
FR
+ M
返回首页
任意力系的简化
结 论
力的平移定理:作用于刚体上的力F ,可以平移 至同一刚体的任一点O ,但必须增加一个附加力偶, 附加力偶的力偶矩等于原力F对于平移点O之矩,即
静力学知识要点详解
《简明理论力学》——哈尔滨工业大学第二版静力学第一章静力学公理和物体的受力分析静力学:即刚体静力学,是研究刚性物体在平衡时的受力状况。
静力学研究三个问题:(1)物体的受力分析;(2)力系的等效代换;(3)力系的平衡条件极其应用。
(一)静力学公理:(1)公理1 力的平行四边形法则(三角形法则)作用在物体上同一点的两个力,可以合成为一个合力。
合力的作用点也在该点,合力的大小和方向,由这两个力为边构成的平行四边形的对角线确定。
(2)公理2 二力平衡条件作用在刚体上的两个力,使刚体保持平衡的必要和充分条件是:这两个力的等值,相反,共线。
(3)公理3 加减平衡力系原理在已知力系上加上或减去任意的平衡力系,并不改变原力系对刚体的作用。
推理1 力的可传性作用于刚体上某点的力,可以沿着它的作用线移到刚体内任意一点,并不改变该力对刚体的作用。
推理2 “三力”平衡汇交定理作用于刚体上三个相互平衡的力,若其中两个力的作用线汇交于一点,则此三力必在同一平面内,且第三个力的作用线通过汇交点。
(4)公理4 作用和反作用定律作用力和反作用力总是同时存在,同时消失,等值、反向、共线,作用在相互作用的两个物体上。
(5)公理5 刚化原理若变形体在某一力系作用下处于平衡,则将此变形体刚化为刚体,其平衡状态保持不变。
(注:反之不一定成立。
因为使刚体平衡的充要条件,对变形体是必要的但非充分的。
)(二)约束和约束力自由体(free body):位移不受限制的物体非自由体(constrained body):位移受到某些限制的物体约束(constraint):对非自由体的某些位移起限制作用的周围物体约束体(constraint body):约束非自由体运动的物体。
约束力(constraint force):约束体作用在非自由体上的力。
注:火车是非自由体,铁轨是约束体,铁轨作用在车轮上的力为约束力。
1、工程中常见的约束(1)光滑接触约束---具有光滑接触面(线、点)的约束约束力特点:作用点:在接触处方向:沿接触处的公法线并指向受力物体;(故称为法向约束力)(2)柔索类约束--由柔软的绳索、胶带或链条等构成的约束约束力方向:柔索对物体的约束力沿着柔索背向被约束物体。
理论力学3—空间力系

r r ur
uur uur r
i jk
M O (F ) r Fuur = x y z
z MO(F)
kr Oj
ih x
Fx Fy Fz
r
r
ur
( yFz zFy )i (zFx xFz ) j (xFy yFx )k
B F
A(x,y,z) y
3.2.1 力对点的矩以矢量表示-力矩矢
力矩矢MO(F)在三个坐标轴上的投
偶系,如图。
z F1
z M2
z
Fn O
x F2
= M1
y
O
x F'n
F'1
= MO
Mn y
O
F'2
x
F'R y
uur uur
uFuri Fuiur uur
M i M O (Fi ) (i 1, 2,L , n)
3.4.1 空间力系向一点的简化
空间汇交力系可合成一合力F'R:
uur uur uur FR Fi Fi
如图所示,长方体棱长为a、b、c,力F沿BD,求力F对AC之矩。
解:
uur uur uur M AC (F ) M C (F ) AC
uur uur
M C (F ) F cos a
Fba
a2 b2
B
C
F
D
c
A
a
b
uur uur uur
M AC (F ) M C (F ) cos
Fabc a2 b2 a2 b2 c2
(F ) uur
[M O (F )]y M y (F )
uur uur
uur
[M O (F )]z M z (F )
理论力学第5章-空间任意力系

100
z
100
FAz
A y
F
FAx
x
100 FBz
B
(
C
a
FBx
)
G
D
b
F2 F1
解: 取整体为研究对象。
列平衡方程
M y(F) 0
G
D 2
F1
d 2
F2
d 2
0
Mx (F) 0 200FBz 300F1 cos 300F2 cos b 100G 0
(4) FR 0
且 MO 0
FR MO
可进一步简化。
MO O
FR
O FR d FR
O1
FR
O d FR
O1
原力系合成为合力 ,合力矢等于原力系的主矢,
其作用线距简化中心的距离为
d MO FR
由上述分析可知 MO MO (FR ) 而 MO MO(F )
由此得
MO (FR ) MO (F)
F2 200 kN FAz 446.41kN
FBx 1189.23kN FBz 919.62 kN
由于 Fy 0 ,因此本例题只有5个独立的平衡方程。
5.4 平行力系中心 、重心 5.4.1 平行力系中心
设在刚体上的A、B两点,分别作用有同向平行力
F1和F2,。利用平面任意力系的简化理论,可求得它们
5.1.3 力矩关系定理
M z (F ) M O (Fxy ) M O (Fx ) M O (Fy ) xFy yFx
同理得
M x (F ) yFz zFy
3.2、空间力系的简化(2-1)(美化)

空间力系的简化RR F F F F F F F F =++=++=321'3'2'1')()()(321F M F M F M M o o o o ++=力系主矢: R F 力系主矩: oM 空间任意力系=主矢+主矩力系简化结果讨论:0=∑=i R F F )(])[()(i Ai i BA i Ai BA i Bi B F r F r F r r F r M ⨯+⨯∑=⨯+∑=⨯∑=AA i BA M M F r +=+∑⨯=01)F R =0、M O =0。
原力系是平衡力系。
2)F R =0、M O ≠0。
原力系等效于一个力偶。
力偶矩是自由矢量,可以平移到空间任意位置而不改变作用效果,所以主矢为零时主矩是一个与简化点位置无关的常量3)F R ≠0、M O =0。
原力系等效于一个力,该力经过简化点,称为原力系的合力。
)(≠∑=i A A F M M力系简化结果讨论:4.1)o R M F ⊥ROA OA O O F r F r F M M ⨯=⨯==)(4)F R ≠0、M O ≠0。
这是最一般的情况,又可细分为以下三种类型:4.2)F R ∥M O 。
主矢力F R 垂直于主矩力偶M O 中两力(F 1、F 1′)所在的平面,这时主矢力与主矩力偶怎么才能化简为一个力?力系简化结果讨论:空间力系的简化4.2)F R ∥M O 。
但力偶矩是自由矢量,可以把主矩M O 平移到主矢力F R 作用线上(图示),从而得到一个力螺旋:力螺旋由一个力和一个力偶构成,且力矢量与力偶矩矢量重合(即:力垂直于力偶中两力所在的平面)。
力螺旋对物体的作用效果是力与力偶作用效果的叠加(平移加旋转),如钻孔时钻头对工件的作用力就是力螺旋,拧螺钉时螺丝刀对螺钉的作用力也是力螺旋。
力螺旋不能再继续简化,它可以表示成图c 、d 所示任一形式。
有缘学习更多+谓ygd3076考证资料或关注桃报:奉献教育(店铺)力系简化结果讨论://O O O M M M -=⊥2//)()()cos (RR R O R R R R O R R O O F F F M F F F F M F F M M ⋅⋅=⋅⋅=⋅=α4.3)F R 既不平行也不垂直于M O 。
空间任意力系的简化

空间平行力系的平衡方程,设各力线都 // z 轴。 因为 mz ( F ) 0 Z 0 X 0 m x ( F ) 0 Y 0 m y ( F ) 0
均成为了恒等式。
2、空间约束
观察物体在空间的六种(沿三轴移动和绕三轴转动)可能 的运动中,有哪几种运动被约束所阻碍,有阻碍就有约束反力。
1、空间任意力系的平衡充要条件是: R '0 F 0 MO mO ( Fi )0
又 R ' ( X ) 2 ( Y ) 2 ( Z ) 2
M O ( m x ( F )) 2 ( m y ( F )) 2 ( m z ( F )) 2ຫໍສະໝຸດ 所以空间任意力系的平衡方程为:
第五章 空间任意力系
§5-1 空间任意力系的简化
与平面任意力系的简化原理(力的平移定 理)相同,空间任意力系也可以简化为一个主 失和一个主矩。但是由于主矩和主失不在同一 平面,所以不能进一步简化为一个合力。 应当注意,主失仍然与简化中心无关;主矩
则与简化中心的选择有关。
§5-2 空间任意力系的平衡条件
X 0,m x ( F ) 0 Y 0,m y ( F ) 0 Z 0,m z ( F ) 0
还有四矩式,五矩式和六矩式, 同时各有一定限制条件。
空间汇交力系的平衡方程为:
X 0 Y 0 Z 0
因为各力线都汇交于一点,各轴都通过 该点,故各力矩方程都成为了恒等式。
阻碍移动为反力,阻碍转动为反力偶。[例]
1)球形铰链 (前面讲过)
球形铰链
2)向心轴承,滚珠(柱)轴承
绕x和z轴的转动 也同时被约束。
3)滑动轴承
4)止推轴承
第9页,加 两个绕轴 转动的约 束。
第三章力系的简化

M O M O ( Fi )
力系若有合力,力系合力对任意轴的 矩等于力系各力对同一轴的矩的矢量和;
M x M x ( Fi )
7. 空间任意力系简化为力螺旋
简化后,若FR0,MO0,且FR与MO平行, 此时无法进一步简化。 这样力与力偶作用面垂直的情况称为力螺旋。
FR与MO同向,称右手螺旋;
4.平面任意力系的简化
1) 平面任意力系向一点简化 平面任意力系
力线平移
平面汇交力系+平面力偶系
平面汇交力系+平面力偶系
合成
平面汇交力系合力FR
平面力偶系合力偶MO
简化点O任选,称简化中心 简化后平面汇交力系的合力FR,有:
简化后平面力偶系的合力偶MO,有:
平面任意力系向作用面内一点简化后得到一个 力和一个力偶,该力的主矢等于原力系的主矢,该 力偶的力偶矩等于原力系对简化中心的主矩。 简化后有以下几种情况: 1) 若FR=0,MO0,则力系合成为一个合力偶, 合力偶矩等于原力系对简化中心的主矩。这种情 况下,主矩与简化中心的位置无关; 2) 若FR0,MO=0,则力系合成为一个合力, 主矢FR与原力系主矢FR相等。主矢FR通过简化 中心。合力与简化中心的位置有关,换一个简化 中心,则MO不为零。
3)结论
任意平面汇交力系:
可以简化为一合力,合力的大 小与方向等于各分力的矢量和(几 何和),合力的作用线通过汇交点。 用矢量表示:
平面汇交力系平衡的充要条件是:该力系的 合力等于零。
几何法求解平面汇交力系,一般适合三个 力汇交的情况
例:如图,为汽车制动机 构的一部分。驾驶员蹬踩 力F=212N,方向与水平 面夹角α=45º。平衡时, DA垂直,BC水平,求拉 杆BC所受的力。已知, EA=24cm,DE=6cm,点 在上,机构不计自重,C、 B、D均为光滑铰链。
力系的简化

j
k
MC(F) a·Sinθ a·CosθCosα a·Sinα =- a·CosθCosαi+FaSin θj
=
0
0
0
令CB=b 则CB =bSinαj + bSinαk
e CB CB
b sin j
sin j cos k
b2 sin 2 b2 cos2
故MC(F)在AB轴上得投影
MAB(F)=MC(F )eCB=FaSinαSinθ
三. 力系向一点的简化
(一). 空间汇交力系的简化(将其简化为一合力)
力的作用线在空间任意分布的力系成为空间任 意力系。各力作用线汇于一点的空间力系,成为空 间汇交力系。
空间汇交力系的合理等于各分力的矢量和(满足 平行四边形法则),合力作用线通过汇交点,即
FR=F1+F2+…… 又由于+FFni=xii+yij+zik
合力偶对各坐标轴得方向余弦:
cos(M,i)= Mx 0.6786 M cos(M,i)= M z 0.2811 M cos(M,i)= M z 0.6786 M
(三). 空间任意力系得简化
FacSinSin
a2 b2
例2.2 作用于手柄上的力F=100N,求①力F 对x轴的
矩 ②力F 对原点o的矩.
解:画出r , r =0.1i+0.4k
又有
z y
o
F = 100(Sin60°cos45°i+Sin60°sin45°j
-cos60°k)
x
100
2i 4
2 4
j
3k 4
0.4m
第二章 力系的简化
右手定则:
理论力学:空间任意力系的简化
• 空间任意力系的简化与平衡条件
2020/12/9
1
理论力学 BUAA
空间任意力系的简化
三、空间任意力系简化结果的讨论
空间任意力系 {F1, F2,, Fn} {FR , MO} 简化结果
1、 FR 0, MO 0 2、 FR 0, MO 0
平衡力系 合力 (过简化点O)
3、 FR 0, MO 0
2020/12/9
10
理论力学
§2-4 各类力系平衡条件
例:结构如图所示,不计构件自重。已知主动力F(作用于杆 的中点),确定铰链O、B约束力的方向并比较其大小。
FA A
F O
1、研究OA杆 B
2、研究AB杆
A
FA
F
B
O
FB
FO FA
(A)
FB
F
FO FB FA FO
FO
(B)
FB
FB FA FO
F
2020/12/9
11
理论力学
§2-4 各类力系平衡条件
二、空间任意力系的平衡条件
空间任意力系简化 {F1, F2 ,, Fn} {FR , MO}
平衡
FR 0, MO 0
n
n
FR Fi ' Fi
i 1
i 1
n
n
MO Mi ri Fi
i1
i1
FR ( Fx )2 ( Fy )2 ( Fz )2 MO ( MOx )2 ( MOy )2 ( MOz )2
二力平衡原理
作用于刚体上的二力为平衡力系的充分必要条件是此 二力等值、反向、共线。
三力平衡定理
作用于刚体上的三个力若为平衡力系,则这三个力的 作用线共面,或汇交于一点或彼此相互平行。
空间力系的简化
MO
O
主矩: M O M O
x FR
FR
A
F1 3 m G1 1.5 m G2 3.9 m 2 355 kN m
y FR
2 2 F F ( F ) ( F ) 709.4 kN R x y 合力FR的大小: R
FR M B 50(i k ) 2.5i d 0.025 j 2 FR 5000
中心轴位置:
最后结果: FR 与 M B 组成的力螺旋。
例2:图示平面力系,已知:F1=F2=F3=F4=F,M=Fa,a为三 角形边长,若以A为简化中心,试求简化的最后结果,并在图 中画出。 解: 力系向A点简化
合成的结果必定是一个合力,这个合力指向被约束物 体,是一个压力 FN
未知量:3个
三、光滑铰链约束
(1) 球铰
FAz
A
FAx
FAy
约束力分布在一部分球面上,分布力均通过球心,构 成一空间汇交力系系,可简化为一个通过球心的合力 FR 球铰的约束力 FR 的大小与方向均未知,通常用沿直角
坐标分解的三个分量: FR x , FR y , FR z
(MO rOA FR ) FR MO FR M A FR
主矢与主矩的点积也与简化中心的选择无关,称之为力 系的第二不变量 由主矢与主矩的点积是否为零,就可判定出简化的最终 是合力还是力螺旋。
特例:平面任意力系的简化
F1 A1 A2
基本力系的简化结果:
汇交力系—过汇交点的合力
力偶系—合力偶
根据力的空间位臵:
空间力系、平面力系
02-8.1 空间任意力系向一点的简化及结果分析(课件)
cos(MO , j)
My MO
cos(MO , k)
Mz MO
作用位置: 刚体上任意位置
空间任意力系及重心的计算
向一点简化的实际意义
x
MO
FR MOx
F' Rx
M F' Oy Ry
y
F'
Rz
MOz
z
— 有效升力 — 有效推进力 — 侧向力 — 偏航力矩 — 滚转力矩 — 俯仰力矩
飞机上升 飞机向前飞行 飞机侧移
O F''R d
F'R FR
MO d FR MO (FR ) MO (Fi)
合力矩定理
合力对某点(轴)之矩等于各分力对同一点(轴)之矩的矢量和
1、空间任意力系向一点的简化 及结果分析
空间任意力系及重心的计算
b. 简化为力螺旋
③ FR' 0, MO 0, FR ' // MO
中心轴过简化中心的力螺旋
力螺旋 中心轴距简化中心为 d MO sin
FR
MO
F'R
FR
M'O
θ
O
M''O
d
F''R
MO MO cos
MO MO sin
d MO MO sin
FR
FR
1、空间任意力系向一点的简化 及结果分析
空间任意力系及重心的计算
c. 简化为合力偶
⑤ F ′ = 0, M ≠ 0
R
O
一个合力偶 与简化中心无关。
d. 平衡
⑥ F R ′ = 0, MO=0
平衡
平面任意力系简化的最后结果
力系的简化和平衡
z MO O x F'R y
FR Fi Fi
力系中各力的矢量和称为空间力系的 主矢。主矢与简化中心的位置无关。
空间力偶系可合成为一合力偶, 其矩矢MO:
MO MO (Fi )
力系中各力对简化中心之矩矢的矢量和称为力系对简化 中心的主矩。主矩与简化中心的位置有关。
3.1.2 (空间任意)力系向一点的简化 结论: 空间力系向任一点O简化, 可得一力和一 力偶, 这个力的大小和方向等于该力系的主矢, 作用线通过简化中心O; 这个力偶的矩矢等于该 力系对简化中心的主矩。
空间任意力系向一点简化的结果可能出现四种情况: (1) F'R=0, MO≠0 ; (2) F'R ≠ 0, MO = 0 ; (3) F'R ≠ 0, MO≠0 ;
′ Fn
O Mn
3.1.2 (平面任意)力系向一点简化 平面一般力系中各力的矢量和称为平面一般力 系的主矢。主矢与简化中心的位置无关。
FR FRx + FRy Fx i Fy j
FR ( Fx ) 2 ( Fy ) 2
Fx cos( FR , i ) FR Fy cos( FR , j ) FR
A
m
B q C
FAy
FB
求得的FAx和FAy为负, 说明与图中 假设方向相反。
例: 求图示刚架的约束反力。
P
A
解: 以刚架为研究对象, 受力如图。
a
q b
Fx 0 : FAx qb 0
Fy 0 : FAy P 0
M A (F ) 0 :
1 2 M A Pa qb 0 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。