基本矩阵的估计和图像矫正汇总
stereorectify+参数

stereorectify+参数一、stereorectify 算法简介1.定义与作用StereoRectify 算法是一种针对双目立体视觉的图像校正方法。
其主要目的是消除双目摄像机系统中的基线误差,从而提高立体视觉测量精度。
通过单应性矩阵对双目图像进行几何变换,使得校正后的左右视图图像具有相同的视角,便于后续的立体匹配和三维重建等操作。
2.算法原理StereoRectify 算法基于八点几何法定理,通过求解单应性矩阵实现图像校正。
首先估计基础矩阵或本质矩阵,然后根据该矩阵计算单应性矩阵。
最后,根据单应性矩阵对左右视图图像进行几何变换,得到校正后的图像。
二、stereorectify 参数详解1.输入参数(1)左右视图图像:作为输入数据,需要对双目摄像机系统中的左右视图图像进行预处理,如去畸变、灰度化等操作。
(2)对应点坐标集:用于计算基础矩阵或本质矩阵的对应点坐标。
在实际应用中,可以通过特征点匹配方法(如SIFT、SURF 等)提取左右视图图像中的特征点,并计算其对应的坐标。
(3)基础矩阵或本质矩阵:用于描述双目摄像机系统的几何关系。
在计算过程中,可以根据对应点坐标集求解该矩阵。
2.输出参数(1)单应性矩阵:经过校正后的左右视图图像之间的几何变换关系。
该矩阵可以用于图像校正、图像拼接等操作。
(2)裁剪边界:校正后的图像边界。
根据单应性矩阵计算裁剪边界,可以避免多余的图像信息。
三、参数调整与应用场景1.参数选择与优化(1)实例分析:针对不同场景和摄像机参数,调整算法中的参数,以达到最佳校正效果。
(2)参数取值范围:根据实际应用需求,设定合适的参数取值范围。
(3)参数间关系:分析各参数之间的相互影响,进一步优化算法性能。
2.算法应用场景(1)图像校正:消除双目摄像机系统中的基线误差,提高立体视觉测量精度。
(2)立体视觉处理:在校正后的图像上进行立体匹配、三维重建等操作。
(3)计算机视觉任务:基于校正后的图像,进行目标检测、识别等任务。
基础矩阵
基础矩阵及其求法同一三维场景在两个不同视点处得到的两幅二维图像之间的几何关系——极几何以及极几何的代数表示——基础矩阵。
两幅图像可以是由两个摄像机在不同位置同时采集的,也可以是同一摄像机顺序采集的,例如摄像机相对场景移动。
对于这两种情况,几何上认为是相等的。
一般地,同一世界坐标系下的同一物体的图像间存在一种几何上的对极约束关系。
在立体视觉中,可以利用图像点的匹配来恢复这种几何关系,反过来,也可以利用这种几何关系来约束匹配,使得对应点的搜索范围由二维平面降低到对应一维极线,使得匹配的鲁棒性、精度都得到很大提高。
对极几何关系在数学上可以用基础矩阵F 来表示,因此,对极几何问题就转化为对基础矩阵F 的估计问题。
精确地计算F 对于标定、寻找精确匹配和三维重建都有重要意义。
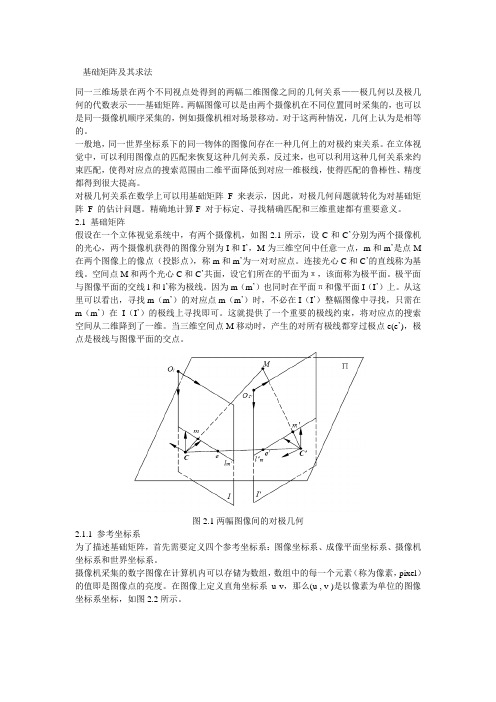
2.1 基础矩阵假设在一个立体视觉系统中,有两个摄像机,如图2.1所示,设C和C’分别为两个摄像机的光心,两个摄像机获得的图像分别为I和I’,M为三维空间中任意一点,m和m’是点M 在两个图像上的像点(投影点),称m和m’为一对对应点。
连接光心C和C’的直线称为基线。
空间点M和两个光心C和C’共面,设它们所在的平面为π,该面称为极平面。
极平面与图像平面的交线l和l’称为极线。
因为m(m’)也同时在平面π和像平面I(I’)上。
从这里可以看出,寻找m(m’)的对应点m(m’)时,不必在I(I’)整幅图像中寻找,只需在m(m’)在I(I’)的极线上寻找即可。
这就提供了一个重要的极线约束,将对应点的搜索空间从二维降到了一维。
当三维空间点M移动时,产生的对所有极线都穿过极点e(e’),极点是极线与图像平面的交点。
图2.1两幅图像间的对极几何2.1.1 参考坐标系为了描述基础矩阵,首先需要定义四个参考坐标系:图像坐标系、成像平面坐标系、摄像机坐标系和世界坐标系。
摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(称为像素,pixel)的值即是图像点的亮度。
PT0018_相机标定及图像畸变矫正原理和实现-----计算机学习实战

➢ 得到空间坐标系和图像坐标系的对应关系。
相机标定的意义
随着相机在成像分辨率、图像采样速率、图像处理速率的提高,在诸如视
觉检测、运动测量及航空航天领域,都需要提高测量精度,这就需要对相机进
点之间有差异,造成图像产生畸变。
图像畸变
畸变矫正原理
图像畸变会随着视场增大而迅速增大,虽然并不影响图像清晰度,但是光学系统的畸
变却直接影响成像的几何位置精度。由于畸变的存在,空间中的一条直线就会在图像中以
曲线的形式呈现,这就造成图像的失真。在视场较小的光学系统中畸变不明显,但在大视
场光学系统就必须采取措施来消除畸变带来的影响。
变化成矩阵相乘形式(如第n个像素点):
( − 0, )(2 + 2 ) ( − 0, )((2 + 2 ))2 1
ො −
=
ො −
( − 0, )(2 + 2 ) ( − 0, )((2 + 2 ))2 2
当有N幅图像的方程组叠加组合时,这样就可以简化Dk=d,利用线性最小二乘的方法解出径向
ො = + [1 2 + 2 + 2 2 + 2 2 ]
ො = + [1 2 + 2 + 2 2 + 2 2 ]
(,
ො )为校正后的图像坐标,(x,y)为校正前的图像坐标,
ො
1 ,2 为径向畸变系数。同时可将
连续图像坐标系的畸变方程组推至像素坐标系中得到:
相机标定及图像畸变矫正
相机标定是什么?
基本任务之一是从相机获取的图像信息获得三维空间中的物体的几何信息,重
矩阵卷积与图像处理课件

矩阵卷积的性质
01
02
03
结合律
矩阵卷积满足结合律,即 (A*B)*C = A*(B*C),这意 味着卷积的顺序不影响结 果。
分配律
矩阵卷积满足分配律,即 A*(B+C) = A*B + A*C, 这意味着卷积可以分配到 加法运算中。
矩阵卷积在CNN中的应用
矩阵卷积是一种特殊的卷积运算,它可以对矩阵输入进行卷积运算,从 而提取出矩阵中的特征。
在图像处理中,矩阵卷积可以用于处理图像的多个通道,例如RGB图像 的三个通道。通过对每个通道分别进行卷积运算,可以提取出图像在不
同通道上的特征。
矩阵卷积还可以用于处理更高维度的数据,例如图像的多个尺度或多个 角度。通过对不同尺度或角度的图像分别进行卷积运算,可以提取出图 像在不同尺度或角度上的特征。
,从而大大提高计算效率。
CHAPTER
02
图像处理简介
图像处理的基本概念
图像
数字图像处理
由像素组成的二维数组,每个像素具 有特定的位置和颜色信息。
将图像转换为数字信号,通过计算机 进行加工处理,再将处理后的结果转 换回图像的过程。
图像处理
利用计算机技术对图像进行加工、处 理和分析,以达到改善图像质量、提 取有用信息或实现某种特定效果的过 程。
总结词
使用NumPy库中的函数对图像进行 特征提取,如边缘检测、角点检测等 。
详细描述
通过使用Sobel算子、Canny边缘检测 、Harris角点检测等算法,提取图像 中的特征,为后续的图像分析和识别 提供基础。
使用Python和TensorFlow进行图像增强
计算机视觉中基础矩阵估计
计算机视觉中基础矩阵估计
基础矩阵估计在计算机视觉中是一个重要的概念,特别是在立体视觉和摄像机姿态估计中。
基础矩阵描述了同一场景在不同视角下的投影关系,是连接两个视图之间的桥梁。
基础矩阵估计的常见方法有八点算法和七点算法。
八点算法需要至少八个对应点来估计基础矩阵,这些点应该是空间中不共线的点,并且至少在两个视图中都能观察到。
通过对应点的坐标和基础矩阵,可以求解出基础矩阵。
七点算法是在八点算法的基础上进行改进,只需要七个非共线的对应点即可估计基础矩阵,但需要满足一定的条件,如对应点之间的距离不能太近等。
除了以上两种算法,还有基于RANSAC的算法、最小二乘法等也可以用于基础矩阵的估计。
在实际应用中,需要根据具体的问题和数据选择合适的方法。
同时,为了提高估计精度,还可以采用多视图的融合方法,将多个视图的信息融合在一起,从而得到更准确的基础矩阵。
在估计基础矩阵之后,可以进行立体匹配、三维重建等操作。
例如,通过立体匹配算法,可以从两个视图中提取出对应的像素点,然后根据基础矩阵和像素点的深度信息,可以恢复出场景的三维结构。
总之,基础矩阵估计是计算机视觉中的重要技术之一,在立体视觉、姿态估计、三维重建等领域都有广泛的应用。
随着计算机视觉技术的不断发展,基础矩阵估计技术也在不断改进和完善。
基础矩阵
基础矩阵及其求法同一三维场景在两个不同视点处得到的两幅二维图像之间的几何关系——极几何以及极几何的代数表示——基础矩阵。
两幅图像可以是由两个摄像机在不同位置同时采集的,也可以是同一摄像机顺序采集的,例如摄像机相对场景移动。
对于这两种情况,几何上认为是相等的。
一般地,同一世界坐标系下的同一物体的图像间存在一种几何上的对极约束关系。
在立体视觉中,可以利用图像点的匹配来恢复这种几何关系,反过来,也可以利用这种几何关系来约束匹配,使得对应点的搜索范围由二维平面降低到对应一维极线,使得匹配的鲁棒性、精度都得到很大提高。
对极几何关系在数学上可以用基础矩阵F 来表示,因此,对极几何问题就转化为对基础矩阵F 的估计问题。
精确地计算F 对于标定、寻找精确匹配和三维重建都有重要意义。
2.1 基础矩阵假设在一个立体视觉系统中,有两个摄像机,如图2.1所示,设C和C’分别为两个摄像机的光心,两个摄像机获得的图像分别为I和I’,M为三维空间中任意一点,m和m’是点M 在两个图像上的像点(投影点),称m和m’为一对对应点。
连接光心C和C’的直线称为基线。
空间点M和两个光心C和C’共面,设它们所在的平面为π,该面称为极平面。
极平面与图像平面的交线l和l’称为极线。
因为m(m’)也同时在平面π和像平面I(I’)上。
从这里可以看出,寻找m(m’)的对应点m(m’)时,不必在I(I’)整幅图像中寻找,只需在m(m’)在I(I’)的极线上寻找即可。
这就提供了一个重要的极线约束,将对应点的搜索空间从二维降到了一维。
当三维空间点M移动时,产生的对所有极线都穿过极点e(e’),极点是极线与图像平面的交点。
图2.1两幅图像间的对极几何2.1.1 参考坐标系为了描述基础矩阵,首先需要定义四个参考坐标系:图像坐标系、成像平面坐标系、摄像机坐标系和世界坐标系。
摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(称为像素,pixel)的值即是图像点的亮度。
视觉基本矩阵与摄影测量中相对方位元素的关系推导
1
引
言
( x' , y' ) 为同名像点) : AT l = 0
T
( 1)
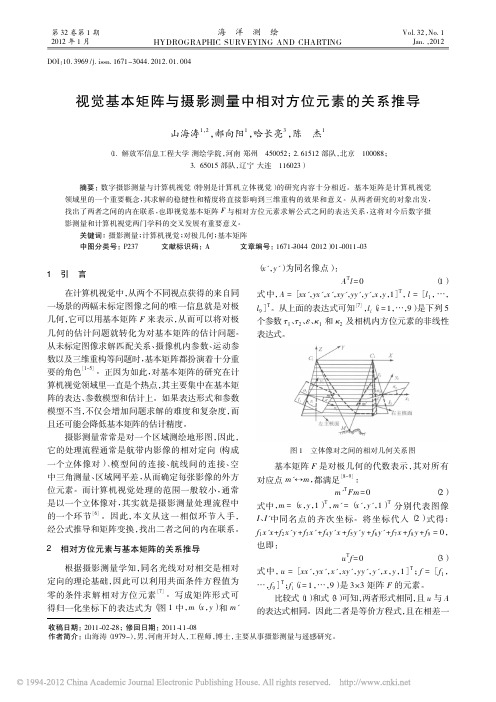
在计算机视觉中, 从两个不同视点获得的来自同 一场景的两幅未标定图像之间的唯一信息就是对极 几何, 它可以用基本矩阵 F 来表示, 从而可以将对极 几何的估计问题就转化为对基本矩阵的估计问题。 从未标定图像求解匹配关系、 摄像机内参数、 运动参 数以及三维重构等问题时, 基本矩阵都扮演着十分重 [ 1-5 ] 。正因为如此, 要的角色 对基本矩阵的研究在计 算机视觉领域里一直是个热点, 其主要集中在基本矩 参数模型和估计上。如果表达形式和参数 阵的表达、 模型不当, 不仅会增加问题求解的难度和复杂度, 而 且还可能会降低基本矩阵的估计精度。 摄影测量常常是对一个区域测绘地形图 , 因此, 它的处理流程通常是航带内影像的相对定向 ( 构成 一个立体像对 ) 、 模型间的连接、 航线间的连接、 空 、 , 中三角测量 区域网平差 从而确定每张影像的外方 位元素。而计算机视觉处理的范围一般较小, 通常 是以一个立体像对, 其实就是摄影测量处理流程中 的一个环节
0. 001 216 437 0. 000 004 060 - 1. 760 135 489 - 0. 021 431 139 1. 759 077 276 1. 000 000
从图 2 的核线分布和表 1 中的核线斜率明显可 F1 和 F2 几乎一致表达了两幅影像之间的几 以看出, 何关系, 也即两个基本矩阵同时正确反映了该像对 的景物结构。由于计算过程中和数据本身存在少许 误差, 从而导致了上述基本矩阵的求解往往不能严 格满足其在理论上的关系, 这与实际计算是相符的。 因此说上述理论公式的推导是合理的 。 4 结束语
该文档贡献者很忙什么也没留下
矩阵在图像处理方面的应用
矩阵大作业一、 简介矩阵理论是数学的一个重要分支,内容十分广泛,是数学和其他学科(如数值分析、概率统计、优化理论以及电学等)的基础,在科学与工程计算方面有着广泛的应用,例如在数字图像处理中就运用到大量的矩阵知识。
数字图像处理(Digital Image Processing)是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。
而对于数字图像我们都很熟悉,我们从计算机上看到的图片,雷达图像,以及人体MRI 图像等等都是数字图像。
二、 涉及的理论知识及应用矩阵在数字图像处理中的应用:我们可以将一幅图像定义为一个二维的函数f (x ,y ),其中x ,y 表示空间坐标,在空间坐标(x ,y )点上的幅值f 表示该点图像的强度或者灰度。
对于数字图像而言,空间坐标x 、y 和幅值f 都是有限的、离散的,这样的话,一幅图像就可用一个二维函数表示。
对于模拟图像不利于计算机进行处理,所以要将模拟图像转换成数字图像,主要包括:取样和量化。
取样就是讲x ,y 坐标值离散化,而量化就是将幅度值离散化,这样取样和量化的结果就是一个矩阵,可以表示为:(0,0)(0,1)..(0,n 1)(1,0)(1,1)..(1,n 1)(x,y)::::(1,0)(m 1,1)..(m 1,n 1)m nf f f f f f f f m f f ⨯-⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥----⎣⎦更一般的矩阵表达式为:(0,0)(0,1)(0,n 1)(1,0)(1,1)(1,n 1)(m 1,0)(m 1,1)(m 1,n 1)....::::..m na a a a a a A a a a ------⨯⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 图像压缩的目的是减少图像遗留在数据中的多余信息,使之得到更高效格式存储和数据传输,而数据可以压缩的原因就在于数据中存在冗余信息。
以数学的观点来看,这一过程实际上就是将二维像素阵列变换为一个在统计上无关联的数据集合,图像压缩是指以较少的比特有损或无损地表示原来的像素矩阵的技术,也称图像编码。
矩阵的基本运算和应用

矩阵的乘法
两个矩阵相乘,需要满足第一个矩阵的列数等于第二个矩阵的行数,结
果矩阵的行数等于第一个矩阵的行数,列数等于第二个矩阵的列数。乘
法运算遵循特定的运算法则。
特殊类型矩阵
方阵
01 行数和列数相等的矩阵称为方
阵。
零矩阵
02 所有元素都为零的矩阵称为零
矩阵。
对角矩阵
03 除主对角线外,其他元素都为
零的方阵称为对角矩阵。
矩阵乘法运算
乘法定义
设A为m×n矩阵,B为n×s矩阵,那么称m×s矩阵C为矩阵A 与B的乘积,记作C=AB。
运算步骤
矩阵乘法运算时,先将第一个矩阵的每一行分别与第二个 矩阵的每一列相乘,再将得到的积相加,得到结果矩阵的 对应元素。
运算性质
矩阵乘法一般不满足交换律,但满足结合律和分配律,且 单位矩阵作为乘法的单位元。
特征选择
基于矩阵分解等方法,选取对模型训练有重要贡 献的特征。
主成分分析(PCA)原理及实现
主成分分析(PCA)原理及实现
计算协方差矩阵。
对原始数据进行标准化处 理。
实现步骤
01
03 02
主成分分析(PCA)原理及实现
01
对协方差矩阵进行特征值分解,得到特征值和特征 向量。
02
选择前k个最大特征值对应的特征向量组成矩阵W。
• 克拉默法则:如果线性方程组的系数矩阵A的行列式|A|不等 于零,则该线性方程组有唯一解,且解可以通过系数矩阵A 和常数项向量b的行列式计算得到。
克拉默法则求解线性方程组
具体步骤 构造系数矩阵A和常数项向量b。 计算系数矩阵A的行列式|A|。
克拉默法则求解线性方程组
对于每一个未知数,将系数矩阵A中对应列替换为常数项向量b,得到新的矩阵B,并计算其行列式|B| 。
矩阵知识点总结大纲

矩阵知识点总结大纲一、矩阵的基本概念1.1 矩阵的定义1.2 矩阵的元素1.3 矩阵的维数1.4 矩阵的转置1.5 矩阵的特殊矩阵二、矩阵运算2.1 矩阵的加法2.2 矩阵的数乘2.3 矩阵的乘法2.4 矩阵的转置2.5 矩阵的幂2.6 矩阵的逆2.7 矩阵的行列式2.8 矩阵的秩三、线性方程组与矩阵3.1 矩阵的行简化阶梯形式3.2 矩阵的列简化阶梯形式3.3 矩阵的增广矩阵3.4 矩阵的系数矩阵3.5 矩阵的齐次线性方程组3.6 矩阵的非齐次线性方程组四、矩阵的应用4.1 线性代数4.2 计算机图形学4.3 信号处理4.4 优化问题4.5 统计学4.6 量子力学五、矩阵分析5.1 矩阵的迹5.2 矩阵的本征值与本征向量5.3 矩阵的相似矩阵5.4 矩阵的对角化5.5 矩阵的奇异值分解5.6 矩阵的正交矩阵六、矩阵的特征6.1 矩阵的周期性6.2 矩阵的稀疏性6.3 矩阵的对称性6.4 矩阵的正定性6.5 矩阵的随机性七、矩阵的发展历程7.1 矩阵的起源7.2 矩阵的发展7.3 矩阵的应用八、矩阵的未来发展8.1 矩阵的应用领域拓展8.2 矩阵的理论深化8.3 矩阵的计算方法改进九、矩阵的教学与研究9.1 矩阵的教学模式9.2 矩阵的教学资源9.3 矩阵的研究方向十、矩阵的未来前景10.1 矩阵的应用前景10.2 矩阵的教学前景10.3 矩阵的研究前景十一、矩阵的总结与展望11.1 矩阵的总结11.2 矩阵的展望结语矩阵知识点总结一、矩阵的基本概念1.1 矩阵的定义矩阵是一个按照长方形排列的数表。
其中的元素可以是数字、符号或数学式。
矩阵是线性代数的基本概念,应用非常广泛,涉及几何学、概率论、微分方程以及物理学和工程学等各个学科。
1.2 矩阵的元素矩阵的元素是矩阵中的一个具体数值或符号。
1.3 矩阵的维数一个矩阵的维数是指矩阵的行数与列数。
如果一个矩阵有m行n列,则称其为m×n阶矩阵。
opencv求出的基础矩阵与本质矩阵数学关系
opencv求出的基础矩阵与本质矩阵数学关系
在计算机视觉中,OpenCV通过SIFT(尺度不变特征转换)或SURF(速度和尺度不变特征转换)等算法可以计算出基础矩阵。
基础矩阵(Fundamental Matrix)描述了两个不同视图之间的点对在归一化平面上的联系。
它满足以下条件:对于图像1中的点x1和图像2中的点x2,有x2^T * F * x1 = 0,其中F为基础矩阵。
本质矩阵(Essential Matrix)则描述了两个相机之间的关系,它可以通过基础矩阵和相机的内参矩阵进行计算。
对于基础矩阵F和相机内参矩阵K1、K2来说,本质矩阵E可以通过以下关系求得:
E = K2^T *
F * K1
需要注意的是,基础矩阵F存在一个未知的尺度因子,而本质矩阵E则是唯一确定的。
因此,在计算本质矩阵时,通常需要进行尺度归一化或进行相机标定。
计算机视觉中基本矩阵的估计方法

计算机视觉中基本矩阵的估计方法
胡凌山;朱齐丹
【期刊名称】《应用科技》
【年(卷),期】2005(032)010
【摘要】基本矩阵的估计是计算机视觉中一项重要的研究课题.从特征点的提取、匹配到从一组对应点求出基本矩阵的估计值,完整地介绍了求解基本矩阵的方法.对于噪声干扰以及问题固有的复杂性所导致的误匹配,以及由此导致的估计结果恶化问题,采用最小中值法(LMedS),有效地解决了存在误匹配情况下稳定、准确地估计基本矩阵的问题.
【总页数】3页(P41-43)
【作者】胡凌山;朱齐丹
【作者单位】哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】TP391.4
【相关文献】
1.基于RANSAC算法的基本矩阵估计的匹配方法 [J], 单欣;王耀明;董建萍
2.一种基于RANSAC基本矩阵估计的图像匹配方法 [J], 郭红玉;王鉴
3.立体视觉中基本矩阵的改进投影M估计方法 [J], 钱江;田铮;句彦伟
4.一种基于基本矩阵估计的立体视觉中滤除误匹配的方法 [J], 王琳;张力;艾海滨
5.基于快速立体匹配的基本矩阵估计方法 [J], 刘丁;赵豆;杨延西
因版权原因,仅展示原文概要,查看原文内容请购买。
估计基本矩阵的一个新方法
万方数据 万方数据第4期增刊估计基本矩阵的一个新方法413距离的均值和标准偏差越小。
最小二乘方法的精度与误匹配点数量有关,使用更多的匹配点会得到更好的结果。
正交最小二乘方法得到较好的结果。
但是这两个方法得到的都是秩3基本矩阵。
修正的正交最小二乘方法虽然得到了秩2的基本矩阵,但是距离均值和标准偏差比原方法更大了。
文中提出的方法可以得到秩2的基本矩阵,距离均值和标准偏差都小于其它4个方法。
图1用于估计基本矩阵的真实图像表1五种不同方法计算得到的距离均值和标准偏差的比较5结论提出了一个新的估计基本矩阵的方法。
该方法基于正交最小二乘技术,使用对应两个最小特征值的特征向量,构造一个3×3的广义特征值问题。
该方法不仅给出了基本矩阵,而且给出了极点,并且将7点算法作为一个特例包含在该方法中。
该方法易于实现,并可得到很好的结果。
参考文献1MilanSonka,VaclavHlavac,RogerBoyle.Imageprocessing,analysis,andmachinevision。
2”Edition.Brooks/Cole,Thomson,1999.艾海州,武勃,等译.图像处理、分析与机器视觉.第2版.北京:人民邮电出版社,2003.2石教英.虚拟现实基础及实用算法.北京:科学出版社,2002.3马颂德,张正友.计算机视觉——计算理论与算法基础.北京:科学出版社,1998.4X.Armangu6,J.Salvi.Overallviewregardingfundamentalmatrixestimation.ImageandVisionComputing,2003,21(2):205220. 万方数据估计基本矩阵的一个新方法作者:钟慧湘, 庞云阶, 冯月萍, Zhong Huixiang, Pang Yunjie, Feng Yueping作者单位:吉林大学计算机科学与技术学院,长春,130012刊名:仪器仪表学报英文刊名:CHINESE JOURNAL OF SCIENTIFIC INSTRUMENT年,卷(期):2004,25(z3)被引用次数:4次an Sonka;Vaclav Hlavac;Roger Boyle Image processing, analysis, and machine vision 19992.石教英虚拟现实基础及实用算法 20023.马颂德;张正友计算机视觉-计算理论与算法基础 19984.X. Armangue;J. Salvi Overall view regarding fundamental matrix estimation[外文期刊] 2003(02)1.向长波.刘太辉.宋建中.Xiang Changbo.Liu Taihui.Song Jianzhong基本矩阵的鲁棒贪心估计算法[期刊论文]-计算机辅助设计与图形学学报2007,19(5)2.熊九龙.林存宝.Xiong Jiulong.Lin Cunbao基于实际物理距离的基本矩阵估计[期刊论文]-电子测量与仪器学报2009,23(11)3.黄以君.刘伟军基于LQS的基本矩阵计算方法[期刊论文]-中国图象图形学报A2009,14(10)4.胡凌山.朱齐丹.HU Ling-shan.ZHU Qi-dan计算机视觉中基本矩阵的估计方法[期刊论文]-应用科技2005,32(10)5.陈杰.刘松林.宇超群一种改进的基本矩阵鲁棒估计算法[会议论文]-20086.高晟丽.陈杰.李海滨.GAO Sheng-li.CHEN Jie.LI Hai-bin基于MATLAB的基本矩阵随机采样鲁棒估计[期刊论文]-海洋测绘2006,26(3)7.郭继东.向辉.GUO Ji-dong.XIANG Hui一个基本矩阵的鲁棒估计算法[期刊论文]-计算机应用2005,25(12)8.杨忠根.任蕾.姜桂祥.曹芳.YANG Zhonggen.REN Lei.JIANG Guixiang.CAO Fang无穷远平面单应性矩阵的线性复原算法[期刊论文]-上海海事大学学报2005,26(1)9.梁栋.童强.屈磊.王年.韦穗.LIANG Dong.TONG Qiang.QU Lei.WANG Nian.WEI Sui一种基于极几何和单应约束的图像匹配算法[期刊论文]-系统仿真学报2006,18(1)10.钱江.田铮.句彦伟.QIAN Jiang.TIAN Zheng.JU Yan-wei立体视觉中基本矩阵的改进投影M估计方法[期刊论文]-计算机应用2007,27(3)1.熊九龙.林存宝基于实际物理距离的基本矩阵估计[期刊论文]-电子测量与仪器学报 2009(11)2.郭磊.邾继贵.叶声华大尺寸三维形貌测量中同名非编码点的精确配准[期刊论文]-红外与激光工程 2008(6)3.山海涛.郝向阳.哈长亮.陈杰视觉基本矩阵与摄影测量中相对方位元素的关系推导[期刊论文]-海洋测绘2012(1)4.唐麟双目视觉立体匹配算法研究[学位论文]硕士 2006引用本文格式:钟慧湘.庞云阶.冯月萍.Zhong Huixiang.Pang Yunjie.Feng Yueping估计基本矩阵的一个新方法[期刊论文]-仪器仪表学报 2004(z3)。
基于三视图约束的基础矩阵估计
基于三视图约束的基础矩阵估计李聪;赵红蕊;傅罡【摘要】考虑到只依赖对极几何关系的匹配点余差并不能完全区分匹配点的正确与否,从而影响内点集选取的情况,提出基于三视图约束的基础矩阵估计算法.首先,使用传统随机抽样一致性(RANSAC)算法计算三视图的任意两对相邻图像间的基础矩阵,确定三视图中共有的匹配点对,并计算估计基础矩阵时非共用图像上的匹配点在共用图像上的极线;然后,计算两条极线的交点与共用图像上对应匹配点间的距离,以距离值的大小作为内点判断的依据,得到新的内点集.在新内点集的基础上,采用M 估计算法重新计算基础矩阵.实验结果表明:该方法可以同时降低噪声和错误匹配对基础矩阵精确计算的影响,精度优于传统鲁棒性算法,使点到极线的距离限制在0.3个像素左右,而且计算结果具有稳定性,可以被广泛地应用到基于图像序列的三维重建和摄影测量等领域中.【期刊名称】《计算机应用》【年(卷),期】2014(034)010【总页数】4页(P2930-2933)【关键词】对极几何;三视图约束;基础矩阵;鲁棒性;随机抽样一致性【作者】李聪;赵红蕊;傅罡【作者单位】清华大学地球空间信息研究所,北京100084;清华大学地球空间信息研究所,北京100084;清华大学地球空间信息研究所,北京100084【正文语种】中文【中图分类】TP391.410 引言基础矩阵是对同一场景拍摄的两幅图像间约束关系的数学描述,是在相机非标定情况下能够从图像中获得的唯一信息,包括相机所有的内部参数和外部参数信息。
所以基础矩阵的精确计算是三维重建、运动估计、相机自标定、图像匹配及目标跟踪等内容的实现前提和研究基础,在计算机视觉和摄影测量等领域受到广泛关注。
关于基础矩阵的计算研究已很多,但由于对极几何是基础矩阵的唯一约束条件,计算结果受数据质量的影响很大,所以鲁棒性的估计算法成为研究热点。
一个高质量的内点集(两幅图像间正确匹配点对的集合)是基础矩阵计算正确性的前提,因此,目前很多的研究仍是致力于如何有效地减少错误匹配点对来获得更好的内点集。
基本矩阵的的估计
图片矫正方法
取一个平行于z轴的平面,我 们称这种平面为参考平面。 将旋转后图像平面上的一个 点沿着线(极平面与平面z = 常数之间的交线)投影到参 考平面。这个在参考平面上 的重投影的图像有平行的极 线。通过保持过程中的Z值, 所有重新投影点在参考平面 上的构成矫正图像。通过改 变Z的值,矫正过程是可逆的: 由一个矫正后的点可以找回 它对应的唯一的原始点。
2阶矩阵的参数化方法
不是所有的正交矩阵都是旋转矩阵。正交矩阵的行列式 可以是 1 个或— 1,正交矩阵的行列式是— 1 的不是一个旋转 矩阵。
然而,我们总是能把公式中的两个正交矩阵转换为两旋 转矩阵,通过改变对角矩阵中的另一个参数的标志s。
2阶矩阵的参数化方法
成为两旋转矩阵和对角矩阵的乘积。旋转矩阵有三个参数的 单位四元数描述,而对角矩阵只需要单参数。因此,七自由 度的一个矩阵是:
基本矩阵的估计和图像矫正
双控1班
温峰
图像矫正的定义
在计算机视觉中,建立图像的对应关系是一个重点和 难点问题。由于图像是二维的,从一幅图像中寻找与另一 幅图像中某点的对应点需要二维搜索。可是二维搜索的计 算量很大,特别是某些特殊的图像,二维搜索基本不可行。 因此我们有必要把二维搜索简化成一维搜索,这就需要将 图像进行矫正,使两幅图像的极线平行于水平扫描线上。
实验
(a)'house”。线是极线。(b)旋转后图片在Z=0平面上的 正交投影。每个线通过原点(x = y = 0)对应一个极线。此外, 在两幅图像中同一梯度的线对应极线。(c)我们的方法矫正 的图像。
2阶矩阵的参数化方法
采用上述参数,几何成本函数,
改写与七参数如下:
然后,上述的成本函数可以通过参数 使其最小,同时保持 秩等于2约束:
OpenCV常用的图像和矩阵操作总结

OpenCv常用图像和矩阵操作目录学习资料 (2)书籍 (2)网站: (2)本地安装目录 (2)图像IplImage (3)Structure IplImage (3)图像的常用操作 (4)图像载入函数 (4)窗口定义函数 (5)图像显示函数 (5)图像保存函数 (5)图像销毁函数 (6)存取图像像素 (6)矩阵CvMat (10)Struct CvMat (10)矩阵的创建和初始化 (11)释放矩阵 (11)复制矩阵: (12)存取矩阵元素 (12)简单的方法 (12)麻烦的方法 (13)恰当的方法 (16)cvmGet()和cvmSet()的局限 (17)矩阵/向量数学操作 (18)矩阵-矩阵操作: (18)按元素的矩阵操作: (19)向量乘积: (19)单矩阵操作: (19)非齐次线性系统求解: (19)特征值分析(针对对称矩阵): (20)奇异值分解SVD: (20)其他 (21)Shell函数显示图片 (21)IplImage 到cvMat的转换 (21)学习资料书籍Learning OpenCV(影印版)作者:Gary Bradski, Adrian Kaehler出版社:东南大学出版社学习OpenCV(中文版)作者:Gary Bradski, Adrian Kaehler译者:于仕琪刘瑞祯出版社:清华大学出版社OpenCV中文教程作者:刘瑞祯于仕琪网站:/index.php/%E9%A6%96%E9%A1%B5/art/200912/172349.htm本地安装目录在安装目录OpenCV1.0\docs 下有各种学习资料只用在本地安装目录下面就可以查询到大部分需要的信息,当然也可以直接百度,google图像IplImageStructure IplImageOpenCv中图像的结构体为IplImage,位于头文件cxcore.h中,IplImage 结构体的定义如下://///////////////////////////////////////////////////////////////////////////typedef struct _IplImage{int nSize; /* IplImage大小*/int ID; /* 版本(=0)*/int nChannels; /* 大多数OPENCV函数支持1,2,3 或4 个通道*/int alphaChannel; /* 被OpenCV忽略*/int depth; /* 像素的位深度,主要有以下支持格式:IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,IPL_DEPTH_16S, IPL_DEPTH_32S,IPL_DEPTH_32F 和IPL_DEPTH_64F */char colorModel[4]; /* 被OpenCV忽略*/char channelSeq[4]; /* 同上*/int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.只有cvCreateImage可以创建交叉存取图像*/int origin; /*图像原点位置:0表示顶-左结构,1表示底-左结构*/int align; /* 图像行排列方式(4 or 8),在OpenCV 被忽略,使用widthStep 代替*/ int width; /* 图像宽像素数*/int height; /* 图像高像素数*/struct _IplROI *roi; /* 图像感兴趣区域,当该值非空时,只对该区域进行处理*/struct _IplImage *maskROI; /* 在OpenCV中必须为NULL */void *imageId; /* 同上*/struct _IplTileInfo *tileInfo; /*同上*/int imageSize; /* 图像数据大小(在交叉存取格式下ImageSize=image->height*image->widthStep),单位字节*/char *imageData; /* 指向排列的图像数据*/int widthStep; /* 排列的图像行大小,以字节为单位*/int BorderMode[4]; /* 边际结束模式, 在OpenCV 被忽略*/int BorderConst[4]; /* 同上*/char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的*/} IplImage;}IplImage;/////////////////////////////////////////////////////////////////////////////主要的成员变量有nChannels : 图像的通道数目,即灰度图像:nChannels = 1; RGB图像nChannels = 3 depth: 每个像素值的数据类型和所占的存储空间origin变量可以有两种取值:IPL_ORIGIN_TL 或者IPL_ORIGIN_BL,分别设置坐标原点的位置于图像的左上角或者左下角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言F矩阵描述的是从不同拍摄点拍摄同一场景的图像时两图中点的对应关系,它还提供有关位置和摄像机参数的信息。
计算F矩阵最常用的是八点算法。
要得到至少八个对应的图像点对。
在这种算法下,我们可以很容易的使用线性方法来估计矩阵。
但是八点算法对额外噪声十分敏感。
为了克服这一缺点。
哈特利(《计算机视觉中的多视图几何》的作者)引入一个坐标使图像标准化归一化。
但是这种线性方法有一个缺点,那就是排除了秩等于2的约束。
为了强加约束,这个F矩阵是利用奇异值分解重建获得的。
这就造成了另一个问题:这个重建的过程会产生额外的噪声。
为了减少噪声,哈特利又应用非线性优化设置七个变化参量来满足秩等于2的约束。
关于那七个变量参数有很多相关的方法,我提出用一个标量的双四元数来描述矩阵。
这些参数代表对一个图像缩放和旋转。
也就是说,我们对原图像进行了旋转。
通过使用这些旋转,我们创造了一个新的图像矫正方法。
对于立体匹配来说,图像矫正是不可或缺的部分。
它把任务由二维搜索变为一维搜索,减轻了任务量。
流行的矫正方法大致可以分为两类:平面法和极性法。
平面矫正法是对图像进行透视变换,这是容易理解且易于实现。
然而,这种方法不能处理那些极点位于图像内部的图像对。
极点矫正法能够处理这种情况,但他们需要根据极点的位置进行一些繁琐的预处理。
F矩阵最麻烦的地方在于它的秩等于2,没有逆矩阵。
为了计算F矩阵,人们提出了八点算法。
这是一种易于实现的线性算法,但是对噪声太过敏感。
人们又提出一种基于图像坐标归一化和非线性最优化的八点算法。
还有很多其他成本函数最小化的方案。
一些人采用另一种参数化的七自由度的方法来满足秩等于2的约束。
对于线性求解,七点匹配是可以用于F矩阵的。
图像矫正技术与F矩阵关系密切,所以密集点的匹配是不可或缺的。
通过矫正,两图片中所有的极线会水平对齐,将二维搜索变为一维搜索,使得任务大大减轻。
本质上来讲,图像矫正是一种旋转。
另一方面,一些矫正方法已经适用于非标定图像对。
非标定图像的矫正比标定图像更有用,因为准确的估计的相机参数是困难的,哪怕只有一个像素的错误就不利于准确匹配。
1 F矩阵的估计1.1对极几何(两视几何)对极几何描述的是场景中的三维点和一对图像点之间的关系。
给定一个场景中三维点P被映射到I和I0两图像中,这三个点就构成一对极几何(图1)。
点C和C0表示分别图像I和I0相机中心。
三点P,C和C0组成平面,这就是所谓的极平面。
每个图像平面与极平面相交,称为极线;一点投影在一个图像会有一个对应点位于其他图像平面的极线上(极线约束)。
这个约束是指当我们有两个图像I和I0,和一点P在I上,如果我们要寻找在I0上对应点P0,仅沿极线搜索就可以了。
假设I平面上的点()T vuP,=对图像和I0平面上的点()T v uP''',=都是是P的投影点,增加了齐次坐标的二维图像坐标,这样笛卡尔坐标下P和P旋转为射影坐标()Tvum1,,=和()Tvum1,,'''=。
采用这种画法,极线约束表现为以下形式:'=Fmm T(1)图1。
对极几何Fig. 1. Epipolar geometry在两幅图像之间,F 矩阵将点 m 映射为对应的对极线,将对极点映射为0。
不能提供对应点间的一一对应。
F 是一个3x3的矩阵。
F 矩阵的有秩等于2的约束,这是由于所有极线必须通过图像的极点。
1.2八点算法的重新审视对于给定的图像对,常用八点算法来线性的估计F 矩阵。
对应的点()i v u ,i 和()''i ,iv u ,由线性系统得到方程:(2) 其中(3)(4) 其中f 由F 矩阵获得:(5)同时有约束条件()()()1f 233212211=+++=f f f需要获得至少八个对,我们才能求解出(2)的估计矩阵。
在刚才的过程中我们没有考虑“矩阵秩等于2”的约束。
为了满足这一约束,选取满足约束和'F F -的Frobenius 范数最小的'F 作为F 矩阵。
具体的方法如下: 首先,对没有秩等于2约束条件下的矩阵进行奇异值分解分解(SVD )如下: (6)如果有在上述过程中无噪音,第三个奇异值,3σ应该是0。
因此,以下矩阵'F 可以取代作为约束矩阵的秩等于2:(7)这个重构矩阵'F 可以作为F 矩阵。
这个过程实现了估计矩阵的秩为2的约束,但它引入附加噪声。
为了解决这个问题,大多数工程在下一步采用非线性优化方法。
由于对应点必须位于极线的约束,我们可以设计下面的几何成本函数:(8)()m F m d '',表示极线上点P0和对应点P 在图像的坐标系统下的距离的平方。
1.3 秩等于2的参数化方法我们所提出的方法的出发点是公式的形式(7)。
这种形式表示的矩阵由两正交矩阵SO (3)和秩等于2的对角矩阵。
如果不失一般性,我们可以指定对角矩阵为(1,s ,0),其中 12σσ=s 。
一般情况下,当一个正交矩阵的行列式是1,矩阵是一个旋转矩阵,可以用一个单位四元数描述。
四元数()3210,,,q q q q q =其中123222120=+++q q q q ,旋转矩阵可以表示如下:(9)独立变量的数目是三;例如q1,q2和q3,如果公式(7)中的正交矩阵U 和V 是旋转矩阵,我们可以采用双四元(DQ )来参数化。
不幸的是,不是所有的正交矩阵都是旋转矩阵。
正交矩阵的行列式可以是1个或—1,行列式是—1的正交矩阵并不是旋转矩阵。
然而,我们总是能把公式(7)中的两个正交矩阵旋变为两旋转矩阵,方法是通过改变对角矩阵中的另一个参数的标志s。
有四种情况要考虑,根据组合两者的决定因素:应用上述程序,方程(7)成为两旋转矩阵和对角矩阵的乘积。
旋转矩阵用式(9)那样的有三个参数的单位四元数描述,而对角矩阵只需要单参数。
因此,估计矩阵一个七自由度的矩阵是:(10)1≤s (11)采用上述参数,几何成本函数可以改写为如下形式:(12)然后,上述的成本函数可以通过参数θ使其最小,同时保持秩等于2约束:(13)图2一个原始图像变换;图像I使用TR旋转,图像'I使用TR'旋转。
Fig. 2. Transformation of an original image; the image I with homogeneous coordinates is rotated by T R and the image'I is transformed by T R'.图3极线。
它们被表示为变换后的图像和平面之间的交叉线,包括线x= y= 0;平面包括线x = y = 0被称为极平面。
在这个图中,我们展示了两个极平面和两条极线。
Fig. 3. Epipolar lines. They are represented as intersection lines between the transformed images and planes that include the line x = y = 0; the planes including the line x = y = 0 are interpreted as epipolar planes. In this figure, we show two epipolar planes and two elipolar lines by doted lines.2 图片矫正由两个旋转矩阵和对角的参数化产生一种新的使所有极线平行的矫正方法。
(14)令()Tzy x T n n n m R n ,,==,()Tzy x Tn n n m Rn '''''',,==则式(14)改写如下:(15)上述方程表示如下比例关系:(16)更具体(17)符号xy代表二维矢量组成的前两个元素,即x和y 作为的三位矢量的元素。
方程(16)的几何解释如下:首先,图像I 使用T R 旋转而来,'I 图像的旋转是由T R 转化来的。
我们称由T R 和TR "映射而来的图像平面作为变换后的图像。
值得注意的是,三维空间的原点不是相机的中心,而是投影坐标系统的(0,0,0)。
然后,变换后的图像进行垂直投影到xy 平面。
这个正交投影是使得式(17)中z 分量消失。
方程(16)表明,任何一对对应点在投影平面上位于同一穿过原点的直线上。
换句话,由TR 旋转后的I 平面和一个过x=y =0的平面有一条交线,这条交线就是极线。
由TR ''变换后的平面'I 和同一含x=y =0的平面相交于一线,这就是相对应的极线。
那个包括线x = y = 0平面被称为极平面。
让我们考虑一个任意平面平行线x = y = 0:z 轴。
我们称这种平面为参考平面。
所有参考平面和极线之间的交线(其中包括线x=y = 0),应平行于彼此。
将旋转后图像平面上的一个点沿着线(极平面与平面z =常数之间的交线)投影到参考平面,即图4中箭头所示的投影。
然后再投影点在参考平面上满足式(16)。
因此,任何从旋转后平面再投影到参考平面的投影点满足方程(14)并且这个在参考平面上的再投影的图像和极线平行。
通过改变在再投影过程中的z 值,所有再投影点在参考平面上的构成矫正图像。
矫正过程是可逆的:通过改变z 的值,由一个矫正后的点可以找回它对应的唯一的原始点。
图4。
矫正图像:图像再投影到参考平面的矫正图像。
Fig. 4. The rectified image: the image re-projected onto the reference plane becomes the rectified image. In the re-projection process, a pixel on the transformed image plane is mapped along the epipolar plane and perpendicularly to the z-axis.3 实验3.1 通过模拟数据评价矩阵 为了评价DQ 方法,同时为了比较其他现有的方法,我们利用一些人工数据集。
我们选择了以下三种方法:极点参数法(EP ),两极点参数法(BEP )和巴托丽参数法(BP )。
3.1.1 极点参数法(EP )(18) 为了确保一个矩阵是奇异的,一列被描述为其他两列的线性组合。
方程(18)有八参数;a~f 最大绝对值被设置为1。
3.1.2 两极点参数法(BEP )(19)图5。
相机配置。
配置1(平行)和配置2(同一直线)。
Fig. 5. Camera configurations. Configuration 1 (parallel) and Configuration 2 (straight).图6。