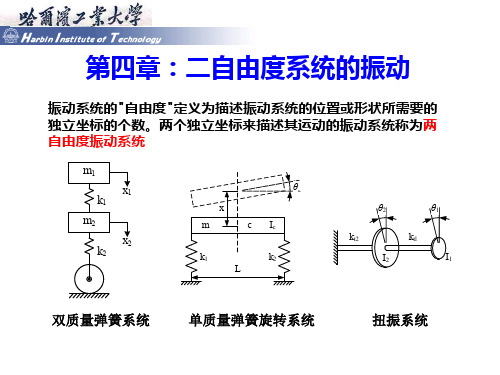
机械振动4两自由度系统的动力学方程1-2全解
《理论力学 动力学》 第十一讲 两个自由度系统的自由振动
两个自由度系统的振动理论曾凡林哈尔滨工业大学理论力学教研组本讲主要内容1、两个自由度系统的自由振动2、两个自由度系统的受迫振动1、两个自由度系统的自由振动(1)模型的简化同一物体的振动可以简化为不同的振动模型。
C研究上下平移振动研究前后颠簸振动两个自由度系统的自由振动模型112122222122()00mxk k x k x m x k x k x ++-=üý-+=þ&&&&2212121m k d m k c m k k b ==+=,,令方程变为:11221200xbx cx x dx dx +-=-+=&&&&,根据微分方程理论,可设上列方程组的解为:)sin()sin(21q w q w +=+=t B x t A x ,其中:A 、B 是振幅;ω为角频率,θ是初始相位角。
将上式代入微分方程组,得到:)sin()sin()sin(0)sin()sin()sin(22=+++++-=+-+++-q w q w q w w q w q w q w w t dB t dA t B t cB t bA t A 整理后得到:0)(0)(22=++-=--B d dA cB A b w w ,系统振动时,方程组具有非零解, 则方程组的系数行列式必须等于零,即:22=----ww d dc b —频率行列式①固有频率1、两个自由度系统的自由振动)()(24=-++-c b d d b w w 行列式展开后得到:—系统的本征方程,又称为频率方程21,22b d w +=m 2b d +=m i ω2的两个根都是实数,而且都是正数。
ii ω2的第一个根较小,称为第一固有频率。
iii ω2的第二个根较大,称为第二固有频率。
结论:两个自由度系统具有两个固有频率,这两个固有频率只与系统的质量和刚度等参数有关,而与振动的初始条件无关。
机械振动 第4章-二自由度系统的振动
(13)
4.2.2 有阻尼二自由度系统的自由振动
写成矩阵形式为:
K x 0 x Cx M
其中:
(14)
m11 m12 m1 0 M m m 0 m 21 22 2 c11 c12 c1 c2 c2 C c c c c 21 22 2 2 k11 k12 k1 k2 k2 K k k k k 21 22 2 2
2 2 如果行列式 K 不是负的,必然 0 b 4ac b ,将 n1
2 n 2
2 2 代入(6),不能求得振幅A1和A2确定值,但可得对应于 n1 n 2 下的比值
称之为振幅比。振幅比决定了振动的振型 2 k22 n A1(1) k12 1m2 r1 (1) 2 A2 k11 n k21 1m1
运动微分方程
1 c2 x 2 (k1 k2 ) x1 k2 x2 F1 (t ) x1 (c1 c2 ) x m1 1 c2 x 2 k2 x1 k2 x2 F2 (t ) x2 c2 x m2
K x F (t ) x C x M
2 k11 m1n k21
k12 0 2 k22 m2n
(6)
4.2.1 无阻尼二自由度系统的自由振动
展开(6)得行列式:
2 2 2 (k11 m1n )(k22 m2n ) k12 0
m1m2 ( ) (m1k22 m2 k11 ) k11k22 k 0
A1(2) 2 1 5 r2 (2) 1.618 A2 2 1 5
例题4-1
r1
0.618
《机械振动》张义民—第4章第1、2节ppt
◆当振动系统需要两个独立坐标描述其运动时, 那么这个系统就是两个自由度系统。
◆两自由度系统是最简单的多自由度系统。 ◆两自由度系统的振动微分方程一般由两个联立 的微分方程组成。 ◆两自由度系统有两个固有频率及固有振型。
◆在任意初始条件下的自由振动一般由这两个固 有振型叠加,只有在特殊的初始条件下系统才按某 一个固有频率作固有振动。
大象体积庞大,走起路来 更是别具一格,四只脚移动 时分别各自相差90度的位移 差。没有一只脚做的是相同 位移的移动。
◆四只脚动物可以看作是“四个振动体耦合在一起的 系统”吗?事实上,四个振动体组成的系统的基本运动 模式,确实与所提到的那四种走路方式一模一样。
◆可是动物们为什么会按照耦合振动体的方式来行走 呢?虽说现在关于这个问题还没有定论。生物学家们认 为,掌管运动的脑神经网(由数突连接起来的神经细胞) 看起来更接近“耦合振动体”一些。有推测认为,正是 脑神经网的动力学特性,使得动物走起路来才会表现出 振动体的特点。
1998年匈牙利的物理学家塔 马斯·维塞克在布达佩斯音乐学 院举行的一场音乐会上意外地发 现了同步化的现象。
演出相当成功,落幕后观众们热烈的掌声长达 3分钟之久,而维塞克博士便在这里发现了有趣 的东西。音乐会刚一结束,观众们雷鸣暴雨般的 掌声响起,然而过了一段时间之后,观众们的热 烈的掌声显然同步化了,变成了同一种节奏的拍 手。为了答谢观众们的热情,演奏者重新走上台 来谢幕,这时的掌声又突然之间失去了刚才的节 奏,雨点般疯狂地响起。在最后长达3分钟的鼓 掌声中,狂热的掌声和同步的掌声依次交替出现。
◆强迫简谐振动发生在激励频率,而这两个坐标 的振幅将在这两个固有频率下趋向最大值。共振时 的振型就是与固有频率相应的固有振型。
动力学-二自由度系统的自由振动

x1 x2
0
MX KX 0
求如下形式的解:
X
c c '
cost
特征方程
2M K 0
(k2 m22 )(k1 k2 m12 ) k22 0
方程有正实根: 1,2
特征向量:
i2 MKຫໍສະໝຸດ c c '0,
i
1,2
如果
X
c c '
cost
是解,
方程的通解:
则
X
c c '
sin
第七章 机械振动基础
• 当描述系统的一组参数在某一固定值附近往复变 化时,称之为振动。
•力学和机械系统中的振动称为机械振动。
研究振动的目的: 1. 振动的性质与特性 2. 利用振动 3. 消除振动
§7-4、二自由度系统的自由振动
一、运动微分方程的建立
取静平衡位置为坐标原点:
k1
m1
x1
T
1 2
m1x12
m122
c4
振型: 第一振型
第二振型
1
u(1)
k1
k2 m112
k2
1
u(2)
k1
k2
m1
2 2
k2
二、二自由度系统自由振动的特性
系统的固有频率、振型与初始条 件无关,仅与系统的参数有关。
三、一般的二自由度系统
二自由度系统的动力学方程
m11 m21
m12 m22
x1 x2
k11 k21
k12 k22
x1 x2
0
MX KX 0
M:广义质量矩阵,K:广义刚度矩阵
1 2
m2 x22
k2
m2
04-1 两自由度系统的振动

主振型向量或模态向量: (1) 1 A 1 A( 2 ) 1 2 振型图:以横坐标表示系统中各点的静平衡位置,以纵坐标表示各 点在振动过程中振幅比的大小,由此所画出的图形。
主振型向量 或模态向量
主振动
燕山大学
Yanshan University
主振动:系统按某一阶固有频率和相应主振型所作的振动。
第一阶主振动:
x1(1) A1(1) sin( n1t 1 )
(1) x2
(1) (1) A2 sin( n1t 1 ) 1 A1 sin( n1t 1 )
整理得系统运动微分方程:
燕山大学
Yanshan University
引入符号:
K1 K 2 a , m1 K2 b , m1 K2 c , m2
1 ( K1 K 2 ) x1 K 2 x2 0 m1 x 2 K 2 x1 ( K 2 K 3 ) x2 0 m2 x
第二阶主振动:
x1( 2 ) A1( 2) sin( n 2 t 2 )
( 2) x2
( 2) ( 2) A2 sin( n 2 t 2 ) 2 A1 sin( n 2 t 2 )
结论:系统作主振动时,各点同时经过平衡位置、同时达到最 大极限位置,并以相同的频率和确定的振型作简谐振动。
2 K 5K m 2m 0.5 K m
燕山大学
Yanshan University
第二阶主振型 第一阶主振型
4.1.3 无阻尼自由振动的通解 由上述分析可见:
燕山大学
Yanshan University
机械振动基础 第三章 二自由度系统讲解
的微分方程解
的微分方程解
注:红色路线代表走不通,绿色路线代表可走通
例3.3 如图所示系统。设m1=m2=m。这是个对称系统, 对称点为k1的中点。取向右为x轴的正方向。
m1
0
0 m2
xx12
c1 c2
c2
c2 c2 c3
x1 x2
k1 k2
k2
k2 k2 k3
如果刚度矩阵是非对角矩阵,称方程存在弹性耦合
如果k2L2 k1L1=0,则刚度矩阵为对角矩阵,方程已经解耦。 这时系统垂直方向的运动与绕质心的转动独立。
3.取广义坐标为yA,yB
由
yC yB
yA yA
L1 L
L
L1
L2
yC
yA
L1 yB
yB L
yA
yA
L2 L
yA
yA yB
mij
2ET xix j
,
kij
2U xix j
,
cij
2D xix j
例如:对系统的动能函数ET
1 2 m1
x12
1 2 m2
x22
利用公式mij 2ET 得:m11 2ET =m1
xi x j
x12
m12 2ET =0 x1 x2
m21 2ET =0 x2 x1
m22 2ET =m2 x22
§3.3 不同坐标系下的运动微分方程 例3.2 汽车的二自由度振动模型如图3—3所示。
——汽车板簧以上部分被简化成为一根刚性杆,具有 质量m和绕质心的转动惯量Ic。质心位于C点。 ——分别在A点和B点与杆相连的弹性元件k1、k2为汽 车的前、后板簧。
只考虑杆的竖向运动(平动)和绕质心的转动(转动)。 系统的动能和势能为
机械振动4两自由度系统的动力学方程

实际振动为:
x(t ) x ( 2) (t ) x ( 2) (t )
1 1 C1 sin(1t 1 ) C2 sin(2t 2 ) (4.1 17) r1 r2
其中C1、C2和1、2由初始条件确定。
《振动力学》 12
例4.1-1: m1 m, m2 2m,
2 2 k11k22 (k1 k2 )(k2 k3 ) k2 k12
i2 0 (i 1,2) i (i 1,2)为正实根,即两个固有 频率。 每个i 代入方程 (4.1 10),得到: 2 k u k12 2 11 i m1 2 (k11 i m1 )u1 k12u2 0 u1 k12 k22 i2 m2
(4.1 15a) (4.1 15b)
u(1)、u( 2)称 为 振 型 向 量 或 模 态 向
量 , 分 别 对 应 于 1、2。
x1(i ) Ci u1(i ) sin( i t i ), 对每个 i: (i ) (i 1,2) (i ) x2 Ci u2 sin( i t i ),
以O点为参考点,O点与质心C的距离为a,距离A、B点分 别为l1、l2,相对静平衡位置O0的位移为x,刚性杆相对平 衡位置的偏角为θ 。 试建立系统的动力学方程。
《振动力学》 19
解:以x、θ 为广义坐标
xc x a sin
θ 为小量
θ
xc x a
k1
x O0
k2
系统的动能:
T 1 2 1 2 C I c C mx 2 2 1 ) 2 1 J 2 a m( x 2 2
m人
k1 c1
m车
两个自由度体系自由振动例题.ppt

4A 3 A 1 2 0 6 A 8 A 0 1 2
3. 频率方程
D
2
4. 求主振型 将λ=λ1代入振型方程, 得
4
6
3 0 8
12 14 0
10 . 6904 , 1 . 3096 1 2
1
6EI 1 EI 0 . 7499 ml3 1 ml3
4A 3 A 1 2 0 A 6 A 8 1 2 0
A 21 1 4 2 .230 A 3 11
6EI 1 EI 2 2 . 140 ml3 2 ml3
1 A 2 . 230
1 1 21 2 2 22
a/2 a 1
3 3 a a , 11 22 6 EI EI
a3 12 21 4EI
m
a
1
m
a a
2
2. 振型方程
) A m A 0 1 12 2 2 2 1 21m 22m2 2 )A2 0 1A 1 ( (11m 1 1
3 a3 1 a 解:1. 运动方程 m A mA 0 2 2 1 6EI 4 EI 3 3 y ( t ) m y ( t ) m y ( t ) a a 1 1 1 1 11 2 2 12 mA m A 0 1 2 EI 4EI 2
3
0
2 14 15 0
12 . 8310 , 1 . 1690 1 2
1 2
12EI 1 EI 0 . 9671 ma3 1 ma3 12EI 1 EI 3 . 2039 ma3 2 ma3
4二自由度系统振动

)
)
0
0
sin( t ) 0
( a 2 )A1 bA2 0
cA1
(
d
2
)A2
0
这是关于 A1 和 A2 的线性齐次代数方程组。显然,A1 A2 0 是它的解, 对应于系统处于静平衡的情况。若要使 A1 与 A2 具有非零解,此方程组
的系数行列式必须等于零,即:
2
F1(t ) F2 (t )
2.1 两自由度系统的振动微分方程
写为矩阵形式:
m1
0
0 m2
x1 x2
c1 c2
c2
其中定义:
c2 c2 c3
x1 x2
k1 k2
k2
k2 k2 k3
x1 x2
F1 F2
(t (t
) )
M
m1
0
0
m2
,
C
c1 c2
但是必须指出并非任何情况下系统都可能作主振动。
x1 ax1 bx2 0 x2 cx1 dx2 0
此方程组的通解是振系的两个主振动的叠加
x1 x2
x1(1) x2(1)
x1(2) x2(2)
x1 r (1) A2(1) sin(1t 1) r (2) A2(2) sin(2t 2 )
x1 x2
F1 F2
(t (t
) )
扭转振动系统
两者坐标形式相同
2.1 两自由度系统的振动微分方程
运动微分方程的矩阵形式
定义:x x1 x2 T x x1 x2 T
x x1 x2 T
F(t) F1(t) F2 (t)T
位移向量; 速度向量; 加速度向量; 激励向量;
矩阵形式的运动微分方程Mx Cx Kx F(t)
机械振动多自由度系统的运动方程

位移方程
x Mx
Mx x 0
与作用力方程比较 Kx Mx K是非奇异的,即K 1的逆矩阵存在
x K 1 (Mx)
K 1
多自由度系统
多自由度系统的运动微分方程--影响系数法
柔度矩阵与刚度矩阵之间的关系
K 1
即当刚度矩阵是非奇异时,刚度矩阵与柔度矩阵互为逆矩阵; 当刚度矩阵是奇异时,不存在逆矩阵即无柔度矩阵。
单自由度系统回顾
单自由度系统回顾
等效质量与等效刚度计算
• 等效质量--动能等效 • 等效刚度--势能等效
阻尼自由振动
• 三种阻尼类型(粘性,库伦,结构) • 阻尼比与临界阻尼,振动方程的解,初始条件下的响应 • 对数衰减率测定系统阻尼 • 粘性阻尼与库伦阻尼的衰减特征
多自由度系统
单自由度系统回顾
系统运动时,质量的惯性力使弹簧产生变形 x1 (m1x1 ) 11 (m2 x2 ) 12 (m3 x3 ) 13 x2 (m1x1 ) 21 (m2 x2 ) 22 (m3 x3 ) 23 x3 (m1x1 ) 31 (m2 x2 ) 32 (m3 x3 ) 33
多自由度系统
多自由度系统的运动微分方程--影响系数法
写成矩阵形式
x1
x2
x3
11 21 31
12 22 32
13 m1
23
0
33 0
0 m2 0
0 0 m3
x1 x2 x3
n
1
kn2
k1n
k2n
第四章 双自由度体系的振动1

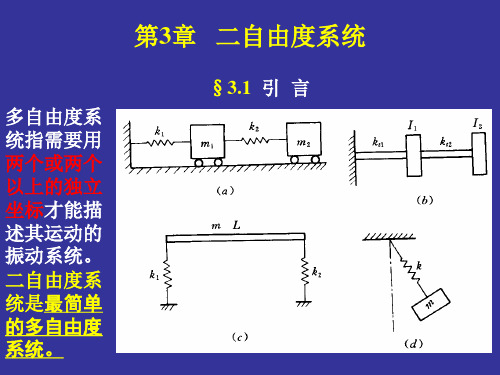
第四章 双自由度体系的振动§4-1 双自由度体系的一般振动方程如某一体系在任一时刻的位形可用二个独立坐标来确定,则该体系就叫做双自由度体系。
如图4-1所示,设体系的两个独立坐标分别为1x 和2x ,它们分别表示质量1m 和2m 离开各自静平衡位置的绝对位移。
选择独立坐标的方法不是唯一的,例如也可以选择质量1m 的绝对位移和质量2m 相对于质量1m 的相对位移作为二个独立坐标。
图4-1 双自由度体系模型由图4-1(b )所示的动平衡隔离体,立即可写出对于1m 和2m 的运动方程为:⎭⎬⎫=-++----=--+-+--0)()()(0)()()(22232312212221112212211111xm x k x c x x k x x c t P x m x x k x x c x k x c t P (4-1)整理后,可得⎭⎬⎫=++-++-=-++-++)()()()()()(22321223212221221212212111t P x k k x k x c c x c xm t P x k x k k x c x c c x m (4-2)引入矩阵记号[][][]{}{}⎪⎪⎭⎪⎪⎬⎫=⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+--+=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+--+=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡)()()(,)()()(,,00212122211211322221222112113222212221121121t P t P t P t x t x t x k k k k k k k k k k k c c c c c c c c c c c m m m m m m m (4-3)式中][m 叫做质量矩阵,为一对称阵;][c 叫做阻尼矩阵,为一对称阵;][k 叫做刚度矩阵,为一对称正定或半正定对称矩阵; )}({t x 和)}({t P 分别叫做位移和外力列向量。
双自由度与多自由度的受迫振动PPT课件
3.双自由度系统的有阻尼受迫振动
..
.
..
平衡条件:
F1(t) k2 (x2 x1) c2 (x2 x1) k1x1 c1 x1 m1 x1
..
.
..
F2 (t) k2 (x2 x1) c2 (x2 x1) k3x2 c3 x2 m1 x2
k2
k2 k2
x1 x2
F1
sin 0
pt
稳态解:
x1(t) X 1 sin pt x2 (t ) X 2 sin pt
X1 F1(k2 m2 p2 ) / , X 2 F1k2 /
系数行列式:
自由度系统中,如果激振力的频率和系统的任何一阶固有频率相近时,系统都将产生共 振,所以双自由度系统有两个共振区。另外,如果子系统通过弹簧传给主系统的力正好 与作用在主系统上的激振力相平衡,这时主系统的受迫振动就被子系统完全吸收掉而保 持静止,这个特性常用来设计动力减振器。
当激振力的频率趋向于无穷时,X1、X 2均趋于零,即激振力频率很高时,两个质量都
(k1
k2
m1
p2 )(k2
m1
p2
)
k
2 2
动力消振器
为方便讨论稳态振动的特性,令主系统固有频率为 12 k1 / m1
子系统固有频率为 22 k2 /m2 。则由主系统的幅频响应曲线
可知当激振力频率与主系统固有频率的比值为1时,即满足:
2 k2 / m2
此时X1 0 ,X1 F0 / k2 ,由于 x2 X 2 sin t F0 sin t / k2
04-1 两自由度系统的振动解析
运动微分方程简化为标准 形式:
1 ax1 bx2 0 x 2 cx1 dx2 0 x
方程的特点: 二阶常系数齐次线 1 项,也含有-bx2项; 性常微分方程组。 x (1)第1个方程既含有 (2)第2个方程既含有 x2 项,也含有-cxl项。 显然,这两个方程是相互耦联的,将-bx2、-cxl称为耦合项。 与单自由度振动系统运动微分方程比较:两自由度振动系统运动 微分方程是含有耦合项的二级常微分方程组。
2
2
固有频率
2 1,2
燕山大学
Yanshan University
ad 2
ad ad ( ad bc ) 2 2
2
ad bc 2
2
2
2 (1)a、b、c、d是由弹簧刚度和质量所决定的正数,所以 1 与 2
均为实根。 (2)因为 ad bc , 正实根。
燕山大学
Yanshan University
1 K 2 ( x2 x1 ) K1 x1 m1 x 2 K 2 ( x2 x1 ) K 3 x2 m2 x
1 ( K1 K 2 ) x1 K 2 x2 0 m1 x 2 K 2 x1 ( K 2 K 3 ) x2 0 m2 x
整理得:
燕山大学
Yanshan University
(a 2 ) A1 bA2 sin(t ) 0 2 cA ( d ) A2 sin(t ) 0 1 为使xl、x2是方程组的解,方程成立的条件为:
2 ( a ) A1 bA2 0 2 cA ( d ) A2 0 1
两自由度系统习题课(机械振动)
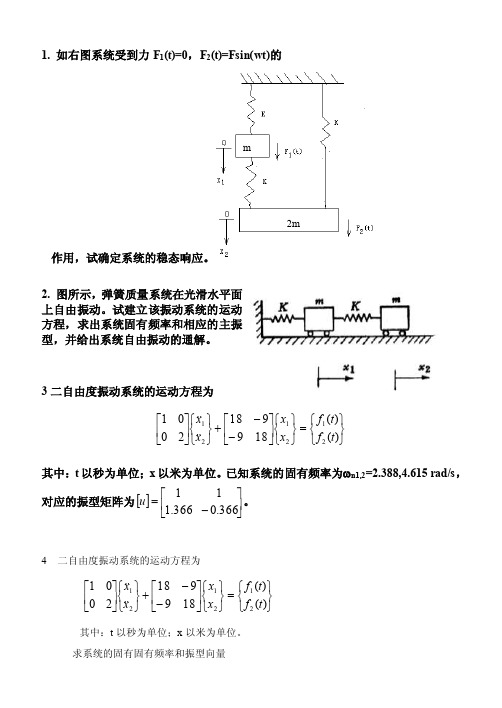
1. 如右图系统受到力F 1(t)=0,F 2(t)=Fsin(wt)的 作用,试确定系统的稳态响应。
2. 图所示,弹簧质量系统在光滑水平面上自由振动。
试建立该振动系统的运动方程,求出系统固有频率和相应的主振型,并给出系统自由振动的通解。
3二自由度振动系统的运动方程为⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡--+⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡)()(1899182001212121t f t f x x xx 其中:t 以秒为单位;x 以米为单位。
已知系统的固有频率为ωn1,2=2.388,4.615 rad/s ,对应的振型矩阵为[]⎥⎦⎤⎢⎣⎡-=366.0366.111u 。
4 二自由度振动系统的运动方程为⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡--+⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡)()(1899182001212121t f t f x x x x其中:t 以秒为单位;x 以米为单位。
求系统的固有固有频率和振型向量m2m5. 写出系统的振动微分方程。
(当摆处于铅直位置时为静平衡位置,此时弹簧处于自然长度,系统作微幅振动)6. 图示为汽车的某理想化模型,车身简化作一刚性杆,质量为m ,质心在C 点,车身对质心的转动惯量为Jc 。
支撑系统简化为两个弹簧,弹簧常数分别为k 1k 和k 2。
假定汽车在纸面内运动,包括(1)车身的垂直运动x ;(2)车身绕其质心在纸面(纵向平面)内的旋转运动,即点头运动。
若k 1=k ,k 2=2k ;l 1=l 2=1,J 0=31ml 2。
请列出车身振动时的运动微分方程。
7.如图,已知m 2=2×m 1=m ,k 3=2k 1=2k 2=2k ,x 10=1.2,x 20=10x=20x =0,试求系统的固有频率,主振型以及相应。
8.已知:⎢⎣⎡=][m,激振力频率ω=3rad/s,9.一辆汽车重。
试确定10.一重块2W 自高h 处自由落下,然后与弹簧-质量系统112k gW k --一起作自由振动,如图3-8所示,试求其响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c2
m m 轮
c3 k3
m轮
c3
优点:分别考虑了人与车、车与车轮、车轮与地面之间的相 互耦合,模型较为精确 需多个独立坐标 问题:如何描述各个质量之间的相互耦合效应?
《机械振动》 4
本章教学内容
§4.1 §4.2 §4.3 §4.4 §4.5 自由振动 静力耦合和动力耦合 任意初始条件的自由振动 简谐激励的强迫振动 动力减振器
m1 x 1 k11 x1 k12 x2 0
k2 k11 k12 k2 k3 k21 k22
m2 x 2 k21 x1 k22 x2 0
(4.1-4)
x1 u1 f (t ), x2 u2 f (t )
找x1与x2同步运动的解:
x2 k3
k1x1
k2(x1-x2)
m1
1 m1 x
m1 x 1 k1 x1 k2 ( x1 x2 ) 0
k2(x1-x2)
m2
k3x2
m2 x 2 k2 ( x1 x2 ) k3 x2 0
写成矩阵形式: 其中:
2 m2 x
M x Kx 0
代入方程得:
(k11 2 m1 )u1 k12u2 0 k21u1 (k22 m2 )u2 0
2
(4.1-10)
代数方程,有非零解的条件:
2 k m1 k12 2 11 ( ) 0 2 k21 k22 m2
《机械振动》
特征行列式,
9
2 k m1 k12 2 11 ( ) 0 2 k21 k22 m2
《机械振动》
5
§4.1
自由振动
两自由度系统的动力学方程一般由两个联立的微分方 程组成。 解两个联立的微分方程会得到两个特征根,即两个固 有频率。 两自由度系统以固有频率进行的振动,
有两个相对固定的位移形态。
这种相对固定的位移形态称为固有振型,或模态。
《机械振动》 6
实例:
k1 m1
x1 k2 m2
ห้องสมุดไป่ตู้
m1 0 M 0 m 2
k1 k2 K k2
k2 x x1 x 2 k 2 k3
质量矩阵
刚度矩阵
《机械振动》
位移向量
7
令k1 k2 k11,
k2 k12 k21,
k2 k3 k22。
k1 k2 K k2
《机械振动》 8
f(t ) f (t ) 0
与单自由度振动的方程一样,要有振动,λ必须为正实数。
而且解为: f (t ) C sin(t )
(4.1-9)
其中:C为任意常数, 为振动频率, 为初相位角。
xi ui f (t ) Cui sin(t ), (i 1,2)
代入方程得:
m1u1 f(t ) (k11u1 k12u2 ) f (t ) 0 m2u2 f(t ) (k21u1 k22u2 ) f (t ) 0
要使上式有解,必须:
f(t ) k11u1 k12u2 k21u1 k22u2 f (t ) m1u1 m2u2
2 2 k11k22 (k1 k2 )(k2 k3 ) k2 k12
i2 0 (i 1,2) i (i 1,2)为正实根,即两个固有 频率。 每个i 代入方程 (4.1 10),得到: 2 2 k12 k u (k11 i m1 )u1 k12u2 0 11 i m1 2 2 2 k u k k21u1 (k22 i m2 )u2 0 22 i m2 1 12
(4.1 15a) (4.1 15b)
u(1)、u( 2)称为振型向量或模态向 量,分别对应于 1、2。
x1(i ) Ci u1(i ) sin(i t i ), 对每个 i: (i ) (i 1,2) (i ) x2 Ci u2 sin(i t i ),
《机械振动》 11
(1) x 1 (1) (1) 1 (t ) 得: x (t ) (1) u f1 (t ) C1 sin(1t 1 ) r1 x2 (t )
《机械振动》 10
(1) u2 k11 12 m1 k12 得:r1 (1) u1 k12 k22 12 m2 ( 2) 2 u2 k11 2 m1 k12 r2 ( 2) 2 u1 k12 k22 2 m2
(1) 1 u (1) (1) 1 得矩阵: u (1) u1 r1 u2 ( 2) 1 u ( 2) ( 2) 1 u ( 2) u1 r2 u2
m人
k1 c1
m车
建模方法2: 车、人的质量分别考虑,并考虑各自 的弹性和阻尼 k2
c2
需两个独立坐标
优点:模型较为精确,考虑了人与车之间的耦合 缺点:没有考虑车与车轮、车轮与地面之间的相互影响
《机械振动》 3
m人
k1 c1
m车
k2 建模方法3: 车、人、车轮的质量分别考虑, 并考虑各自的弹性和阻尼 k3 c2 k2
2 ( 2 ) m1m2 4 (m1k22 m2k11 ) 2 k11k22 k12 0
2 12 1 m1k 22 m2 k11 1 m1k 22 m2 k11 2 k11k 22 k12 2 ( ) 4 m1m2 2 m1m2 m1m2 2 2
第四章
两自由度系统的振动
《机械振动》
1
例子:汽车行驶在路面上会产生上下振动 m
k 要求:对汽车的上下振动进行动力学建模 分析:人与车、车与车轮、车轮与地面之间的运动存在耦合 建模方法1: 将车、人等全部作为一个质量考虑,并考虑弹性和阻尼 优点:模型简单(单自由度) 缺点:模型粗糙,没有考虑人与车、车与车轮、车轮与地面之 2 《机械振动》 间的相互影响 c