激光振镜工作原理
激光投影仪振镜原理
激光投影仪振镜原理全文共四篇示例,供读者参考第一篇示例:激光投影仪是一种利用激光光源进行投影的高科技设备,广泛应用于会议室、教室、影视剧院等场所。
激光投影仪振镜原理是其核心部件之一,具有非常重要的作用。
激光投影仪振镜原理主要分为两种类型:扭转振镜和折射振镜。
扭转振镜是将激光束通过振镜的转动来实现投影区域的扫描,而折射振镜则是通过振镜的折射来实现激光束的偏转。
在激光投影仪中,激光光源会发出一束高亮度、高聚焦度的激光束,经过激光扩束系统后,激光束会被聚焦到一个微小的点上。
接下来,通过振镜的转动或折射,可以实现激光束的扫描或偏转。
当激光束经过振镜后,其方向会发生改变,从而可以实现在投影面上形成一个完整的图像。
扭转振镜是较为常见的一种振镜类型,通常由两个正交方向的振镜组成。
当其中一个振镜在一个方向上转动时,另一个振镜在另一个方向上转动,通过两个振镜的协同工作,可以实现全方位的激光束扫描。
而折射振镜则是通过振镜表面的折射原理来实现激光束的偏转。
当激光束入射到振镜表面时,由于振镜表面的折射率不同,激光束会在振镜表面上发生折射,从而改变其方向。
通过不同设计形式的折射振镜,可以实现不同方向的激光束偏转。
无论是扭转振镜还是折射振镜,其核心原理都是通过振镜的运动或折射来实现激光束的扫描或偏转,从而实现在投影面上形成一个完整的图像。
这种振镜原理具有高速度、高精度、高可靠性的特点,可以满足激光投影仪对于图像质量和投影效果的要求。
激光投影仪振镜原理是激光投影技术的重要组成部分,其高速度、高精度的工作特性可以为用户带来更加清晰、稳定的投影效果。
在未来的发展中,随着技术的不断进步和创新,激光投影仪振镜原理将会更加完善,为用户带来更加优质的投影体验。
第二篇示例:激光投影仪是一种通过激光技术将图像投射到屏幕上的设备,它广泛应用于会议室、教室、影院等场所。
激光投影仪的核心部件之一就是振镜,它起着扫描和定位的作用。
下面将介绍激光投影仪振镜的原理和工作机制。
激光投影仪振镜原理

激光投影仪振镜原理全文共四篇示例,供读者参考第一篇示例:激光投影仪是一种利用激光技术进行投影的设备,它可以将激光光束通过透镜系统投射到屏幕上,实现高清晰度、高亮度的影像显示。
而激光投影仪中的振镜是起到很重要作用的一个部件,它能够有效控制和调节激光的投影方向和范围,使得投影效果更为精准和清晰。
激光投影仪的核心部件之一就是振镜,它是一种能够在电磁场的作用下进行振动的光学元件。
其原理主要是通过电磁感应作用,使得振镜在不同电磁场的激励下发生振动,并调整激光光束的投射方向和角度。
振镜通常由镜片、驱动器和反射器组成,具有高精度和高速度的运动性能。
振镜的工作原理可以简单概括为以下几个步骤:通过对振镜施加电流或电压信号,驱动器产生电磁场,使得振镜在电磁场的作用下发生振动。
振镜上的反射器通过振动将激光光束反射到不同的方向。
调节电磁场的强度和频率,可以控制振镜的振动频率和幅度,从而达到精确调整激光光束的投影方向和范围的目的。
在激光投影仪中,振镜的作用是非常关键的,它可以帮助实现激光光束的扫描和定位,使得投影效果更为清晰和准确。
而且,振镜具有高速度和高精度的优点,可以快速响应信号,实现高速振动和高精度的定位,适用于需要快速切换和动态调整投影角度的场合。
在激光投影仪应用中,振镜还可以用于实现全息投影、3D投影、游戏互动等功能,为用户带来更加多样化和丰富的投影体验。
振镜还可以实现多光束合成、叠加和混合投影,将不同的光束投射到不同位置,实现更加独特和个性化的投影效果。
激光投影仪振镜原理是通过电磁感应作用实现振动,控制和调节激光光束的投射方向和角度,实现高精度、高速度的光束调整和投影效果。
振镜在激光投影仪中扮演着非常重要的角色,是实现高清晰、高亮度、多功能投影的关键技术之一。
随着激光技术和振镜技术的不断发展和完善,激光投影仪将会在未来的应用领域中发挥更加重要和广泛的作用。
第二篇示例:激光投影仪是一种先进的投影技术,使用激光作为光源,通过激光振镜来控制光束的方向和强度,从而实现高清晰度的投影效果。
激光振镜工作原理
激光振镜工作原理激光振镜,是由激光器和振镜两部分组成的光学系统。
激光振镜主要用于调节激光束的方向和位置,广泛应用于激光打标、激光切割、激光焊接、激光照明等领域。
下面将详细介绍激光振镜的工作原理。
激光振镜的工作原理是基于光学干涉的原理。
当激光通过半导体激光器发射出来后,进入振镜系统。
振镜由两块平面镜组成,一块为输入镜,另一块为输出镜。
输入镜和输出镜之间有一个角度,这个角度决定了激光束发射出去的方向。
输出镜上有一个小孔,通过调节小孔的位置和大小,可以调节激光束的位置和焦点。
当激光通过输入镜后,会被反射到输出镜上。
输出镜会将激光束反射回输入镜,形成来回反射的光路。
激光振镜的工作原理是利用光学干涉的原理,通过反射光束的相位差来调节激光束的方向和位置。
在激光振镜中,输入镜和输出镜之间的角度是一个关键参数。
改变这个角度,可以改变激光束发射的方向。
通常情况下,振镜会通过一个扫描驱动器来控制角度的改变。
扫描驱动器可以通过电机、电磁驱动器或者压电陶瓷来实现。
当输入镜和输出镜之间的角度发生变化时,激光束的方向也会发生变化。
通过控制扫描驱动器的工作,可以实现激光束在水平方向和垂直方向上的扫描。
这样,就可以实现激光束在一个特定区域内的定位和打标。
除了角度的控制,激光振镜还需要对激光束的位置进行调节。
通常情况下,激光束经过输出镜反射后,通过在输出镜上设置一个小孔来调节位置。
通过调节小孔的位置和大小,可以改变激光束在焦点处的位置和强度。
总之,激光振镜工作的原理是利用光学干涉的原理,通过反射光束的相位差来实现激光束的方向和位置的调节。
通过控制输入镜和输出镜之间的角度、扫描驱动器的工作和小孔的位置,可以实现激光束在一个特定区域内的定位和打标。
激光振镜的工作原理在激光加工领域具有重要的应用价值。
激光振镜焊接原理
激光振镜焊接原理
嘿,朋友们!今天咱来唠唠激光振镜焊接原理。
你说这激光振镜焊接啊,就好像一个超级厉害的小魔法师!激光束呢,就像是它手中那神奇的魔法光线。
咱就想想啊,那小小的激光束,能量可大着呢!它能精准地找到要焊接的地方,然后“嗖”的一下,就把材料给连接起来啦,这多牛啊!
这激光振镜呢,其实就是控制激光束行动的指挥官。
它能让激光束快速地在不同的位置之间跳转,就跟那跳舞似的,可灵活啦!而且啊,它还特别精准,绝不会出啥差错。
你看,平常咱们焊接个东西,是不是得小心翼翼,生怕出问题。
但有了这激光振镜焊接,就完全不一样啦!它就像有一双超级厉害的眼睛,能一下子就找到最合适的焊接点,然后“咔嚓”一下,完美搞定!这可比咱自己手工焊接厉害多了吧?
就好比咱走路,咱得一步一步走,还可能走歪了。
但激光振镜焊接呢,那是“嗖”地一下就到地方啦,还不会跑偏!这效率,这精准度,谁能比呀!
再说了,这激光振镜焊接的应用那可广泛啦!汽车制造、电子设备,哪儿都有它的身影。
它就像一个默默无闻的英雄,在背后为我们的生活提供着各种便利呢!
想象一下,如果没有激光振镜焊接,那得有多少东西没法制造出来呀!那些高科技的产品,不都得靠它嘛!
所以说啊,激光振镜焊接原理可真是个了不起的东西!它让我们的生活变得更加美好,更加便捷。
咱可得好好感谢这个小魔法师一样的技术,不是吗?它真的是在默默地为我们的生活贡献着巨大的力量啊!
原创不易,请尊重原创,谢谢!。
振镜工作原理
振镜工作原理振镜是一种常见的光学元件,它在许多光学设备中都扮演着重要的角色。
振镜的工作原理是基于光的反射和折射规律,通过振动来改变光束的方向,从而实现光学设备的功能。
振镜的工作原理可以分为静态振镜和动态振镜两种类型,下面将分别介绍这两种振镜的工作原理。
静态振镜是指振镜在工作过程中不发生位置的变化,其工作原理主要是基于光的反射规律。
当光线照射到振镜表面时,根据入射光线和振镜表面的夹角,光线会发生反射,并按照反射定律发生折射。
通过调节振镜的角度和位置,可以实现对光线的精确控制,从而实现光学设备的功能。
静态振镜通常用于激光打印机、光刻机等设备中,其稳定性和精度要求较高。
动态振镜是指振镜在工作过程中会发生位置的变化,其工作原理主要是基于振动和光的反射规律。
当振镜受到外部的激励力或电场作用时,会产生振动,从而改变光束的方向。
通过控制振镜的振动频率和幅度,可以实现对光束的精确调节,从而实现光学设备的功能。
动态振镜通常用于激光扫描仪、激光雷达等设备中,其速度和灵活性要求较高。
总的来说,振镜的工作原理是基于光的反射和折射规律,通过振动来改变光束的方向,从而实现光学设备的功能。
静态振镜和动态振镜分别适用于不同的光学设备,其工作原理和应用场景有所不同。
通过对振镜工作原理的深入了解,可以更好地应用振镜技术,提高光学设备的性能和功能。
在实际应用中,振镜的工作原理还与材料的选择、表面处理、驱动方式等因素密切相关。
因此,在设计和制造振镜时,需要综合考虑这些因素,以确保振镜具有良好的工作性能和稳定性。
同时,随着光学技术的不断发展,振镜的工作原理也在不断创新和完善,为光学设备的应用提供更多可能性。
综上所述,振镜作为一种重要的光学元件,其工作原理基于光的反射和折射规律,通过振动来改变光束的方向,从而实现光学设备的功能。
静态振镜和动态振镜分别适用于不同的光学设备,其工作原理和应用场景有所不同。
在实际应用中,需要综合考虑材料、表面处理、驱动方式等因素,以确保振镜具有良好的工作性能和稳定性。
振镜的工作原理

振镜的工作原理一、激光打标的发展过程:激光打标机的核心是激光打标控制系统和激光打标头,因此,激光打标机的发展历程就是激光打标控制系统和激光打标头的发展过程。
从1995年起,在激光打标机领域就经历了大幅面时代、转镜时代和振镜时代,控制方式也完成了从软件直接控制到上下位机控制到实时处理、分时复用的一系列演变,如今,半导体激光机、光纤激光机、乃至紫外激光机的出现和发展又对光学过程控制提出了新的挑战——振镜式激光打标头(振镜式扫描系统)是最新产品。
1998年,振镜式扫描系统在中国的大规模应用开始到来。
所谓振镜,又可以称之为电流表计,它的设计思路完全沿袭电流表的设计方法,镜片取代了表针,而探头的信号由计算机控制的-5V —5V或-10V-+10V的直流信号取代,以完成预定的动作。
同转镜式扫描系统相同,这种典型的控制系统采用了一对折返镜,不同的是,驱动这套镜片的步进电机被伺服电机所取代,在这套控制系统中,位置传感器的使用和负反馈回路的设计思路进一步保证了系统的精度,整个系统的扫描速度和重复定位精度达到一个新的水平。
二、激光扫描原理:振镜扫描式打标头主要由XY扫描镜、场镜、振镜及计算机控制的打标软件等构成。
其工作原理是将激光束入射到两反射镜(扫描镜)上,用计算机控制反射镜的反射角度,这两个反射镜可分别沿X、Y轴扫描,从而达到激光束的偏转,使具有一定功率密度的激光聚焦点在打标材料上按所需的要求运动,从而在材料表面上留下永久的标记,聚焦的光斑可以是圆形或矩形.南京波长光电科技有限公司武汉事业部提供的扫描反射镜,具有99.5%以上的反射率,每片的尺寸根据激光光束的大小计算。
相对于两轴扫描镜,一般Y反射镜比X反射镜尺寸更大些,X反射镜是扫描到Y反射镜,而不是直接扫描到物体。
其原理如下图所示在振镜扫描系统中,可以采用矢量图形及文字,这种方法采用了计算机中图形软件对图形的处理方式,具有作图效率高,图形精度好,无失真等特点,极大的提高了激光打标机的质量和速度。
激光振镜场镜原理(精)
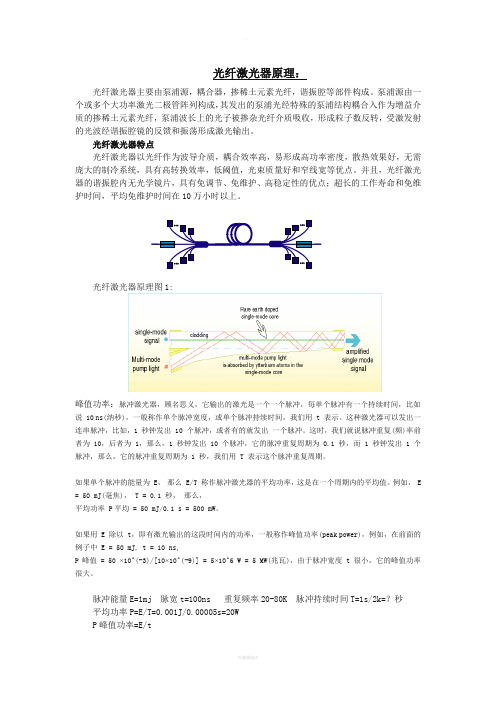
光纤激光器原理:光纤激光器主要由泵浦源,耦合器,掺稀土元素光纤,谐振腔等部件构成。
泵浦源由一个或多个大功率激光二极管阵列构成,其发出的泵浦光经特殊的泵浦结构耦合入作为增益介质的掺稀土元素光纤,泵浦波长上的光子被掺杂光纤介质吸收,形成粒子数反转,受激发射的光波经谐振腔镜的反馈和振荡形成激光输出。
光纤激光器特点光纤激光器以光纤作为波导介质,耦合效率高,易形成高功率密度,散热效果好,无需庞大的制冷系统,具有高转换效率,低阈值,光束质量好和窄线宽等优点。
并且,光纤激光器的谐振腔内无光学镜片,具有免调节、免维护、高稳定性的优点;超长的工作寿命和免维护时间,平均免维护时间在10万小时以上。
光纤激光器原理图1:峰值功率:脉冲激光器,顾名思义,它输出的激光是一个一个脉冲,每单个脉冲有一个持续时间,比如说 10 ns(纳秒),一般称作单个脉冲宽度,或单个脉冲持续时间,我们用 t 表示。
这种激光器可以发出一连串脉冲,比如,1 秒钟发出 10 个脉冲,或者有的就发出 一个脉冲。
这时,我们就说脉冲重复(频)率前者为 10,后者为 1,那么,1 秒钟发出 10 个脉冲,它的脉冲重复周期为 0.1 秒,而 1 秒钟发出 1 个脉冲,那么,它的脉冲重复周期为 1 秒,我们用 T 表示这个脉冲重复周期。
如果单个脉冲的能量为 E , 那么 E/T 称作脉冲激光器的平均功率,这是在一个周期内的平均值。
例如, E= 50 mJ(毫焦), T = 0.1 秒, 那么,平均功率 P 平均 = 50 mJ/0.1 s = 500 mW 。
如果用 E 除以 t ,即有激光输出的这段时间内的功率,一般称作峰值功率(peak power),例如,在前面的例子中 E = 50 mJ, t = 10 ns,P 峰值 = 50 ×10^(-3)/[10×10^(-9)] = 5×10^6 W = 5 MW(兆瓦),由于脉冲宽度 t 很小,它的峰值功率很大。
振镜激光原理

振镜激光原理
振镜激光的原理很简单。
当激光束在一个晶体中的传播方向垂直于晶体表面时,由于晶体表面有许多小台阶,其中的电子可以沿台阶从上向下跃迁到价带。
在价带,电子能量降低到与原来能级间能量差的数值,当它跃迁到导带时,就会产生辐射。
例如,波长为1040nm的激光可以通过一个长而窄的石英晶体进行传播,该晶体有4个能级。
每个能级都包含2个电子,每个电子从低能级跃迁到高能级需要一个能量差(即一个电子从基态向激发态跃迁时所需的能量)。
因此,当激光束在晶体中传播时,它可
以吸收一个光子并将其激发到更高能级中去。
这个光子能量为1.12eV。
如果我们把一个与晶体表面平行的平面镜贴在晶体的
表面上,它就可以使这些小台阶保持垂直状态,这样,激光束就不会与晶体表面发生相互作用,也不会被吸收掉。
激光束在传播过程中没有能量损失。
如果在晶体中添加一些杂质(例如金)或引入一些吸收边(例如吸收边超过1.18eV),这些杂质或吸收边就可以使激光束被限制在很窄的频率范围内。
—— 1 —1 —。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
重复精度
< 22μrad
动态性能
零点漂移 增益漂移
30μrad/K 80ppm/K
8 小时期漂移
< 0.3mrad, 加上增益和零点漂移带来的温漂
典型扫描角度
±0.35rad
光学性能
增益误差 零点偏置
< 5mrad < 5mrad
非线性
< 3.5mrad
接口
模拟式打标头 数字式打标头
±4.8 V XY2-100 标准
激光振镜工作原理
激光打标设备的核心是激光打标控制系统和激光打标头,因此,激光打标的发展历程 就是打标控制系统和激光打标头的发展过程。从 1995 年起,在激光打标领域就经历了大 幅面时代、转镜时代和振镜时代,控制方式也完成了从软件直接控制到上下位机控制到实 时处理、分时复用的一系列演变,如今,半导体激光器、光纤激光器、乃至紫外激光的出 现和发展又对光学过程控制提出了新的挑战,振镜式激光打标头(振镜式扫描系统)是最新产 品。1998 年,振镜式扫描系统在中国的大规模应用开始到来。所谓振镜,又可以称之为电 流表计,它的设计思路完全沿袭电流表的设计方法,镜片取代了表针,而探头的信号由计 算机控制的-5V—5V 或-10V-+10V 的直流信号取代,以完成预定的动作。同转镜式扫描 系统相同,这种典型的控制系统采用了一对折返镜,不同的是,驱动这套镜片的步进电机 被伺服电机所取代,在这套控制系统中,位置传感器的使用和负反馈回路的设计思路进一 步保证了系统的精度,整个系统的扫描速度和重复定位精度达到一个新的水平。
115x95x95
143x123x113
80×54×33
说明: 1)上述数字打标头的激光波长为 1064nm、532nm 或 10.6um。其它波长可以定做。 2)打标面积取决于场镜,标准配置通常是 STY-1064-110-160(1064nm)、STY-532-110-160 (532nm)或 STSL-10.6-105-149(10.6um)。也可以是其它打标面积的场镜。 3)上述数字打标头的入射光斑直径是 10mm,也可以提供其它入射光斑的数字打标头。 4)打标软件 LMC、SamLight 等可以用来控制这些打标头。 激光飞行打标头
了最小的光斑直径。
图例(单位: mm)
1 水冷进光孔 (LSSL-DNF-20 可选)
2 线性马达和调焦镜片
3 安装固定面
4 物镜连接头
5 聚焦镜片
6 聚焦调节环
A 风冷接口
W 水冷接口
LSSL-DNF-40 和 LSSL-DNF-40I 允许客户安装各式各样可切换的光学组件。集成的
风冷和水冷系统可使系统在很高的功率水平上工作。LSSL-DNF-20I 型号也配有水冷接口。
包含的控制板
DSCB + 接口板
DSCB + 接口板
SSV30
重量 (视光学配置)
500 g to 700 g
大约 2.4 kg
大约 2.4 kg / 4.5 kg
(1) 模拟版:输入信号可选: ±4.8 V; ±9.6 V / ±4.8 mA; ±9.6 mA; 输出信号: TTL 电平 (2) 对于 LSSL-DNF-40F: 步进马达输入和限位开关输出信号
-
-
焦距
(395±18) mm to (940±60)mm to
-
(1300±122)mm (850±148)mm
(940±140) mm (2850±600) mm
最大连续激光功率
20 W
50 W
1000 W
500 W
500 W
工作温度
25°C ±10°C 25 °C ±10°C 25°C±10°C 25°C ± 10°C
码、图案等各种信息,标记永久,不可擦涂,无任何耗材,清洁环保。传统上使用墨水喷
码标记,极易擦涂。
产品特点:
1、与传统在线墨水喷码方法相比,激光在线打标具有速度更快(高达 100 米/分钟)
、效率更高、防伪效果显著、符合欧洲环保标准、运行费用极低等优点。
2、飞行打标头可以与各类激光器配合,制作飞行激光打标机。
三轴扫描系统典型光学配置
LSSL-DNF-20I
LSSL-DNF-40I
LSSL-DNF-40F
激光
Nd:YAG
Nd:YAG x 3
CO2
CO2
CO2
波长
1064 nm
355 nm
10.6 nm
10.6 μm
10.6 μm
XY 扫描装置
10mm 光孔 14mm 光孔 30mm 光孔
30mm 光孔
30mm 光孔
激光飞行打标头由一对扫描镜、一对光学扫描振镜、场镜、振镜底座、专用打标软件、
编码器及相关的机械部件和电源组成。根据激光波长的不同选用相应的光学元器件。相关
的选件还包括激光扩束镜、激光器等。
本产品适合在各类企业的产品生产线上对产品表面或外包装表面进行在线飞行打标。
打标内容包括产品商标、符号、批号、序列号、生产日期、保质期、制造单位名称、条形
< 3 μm
< 10 μm
电力需求
30VDC (29-33V),最大 1.5A
30VDC (29-33V),最大 DC,最大 1.5 A
电气接口
XY2-100 增强型,
XY2-100 增强型,
XY2-100 标准型,
SL2-100
SL2-100
SL2-100 或者光数据传输 (1), (2)
振镜扫描式打标因其应用范围广,可进行矢量打标和点阵打标,标记范围可调,而且 具有响应速度快、打标速度高(每秒钟可打标几百个字符)、打标质量较高、光路密封性 能好、对环境适应性强等优势已成为主流产品,并被认为代表了未来激光打标的发展方向, 具有广阔的应用前景。
外形图 1(LSHL 系列打标 外形图 2(LSCT 系列打标 外形图 3(LSSL 系列打标 外形图 4(LS22 系列打标头)
3、操作简便、应用领域广泛、适应多种材料的打标。
应用行业:
由飞行打标头制造的激光飞行打标机可广泛应用于医药、个人护理品、烟草、食品饮
料包装、酒类、乳制品、服装辅料、皮革、电子元器件、化工建材产品等领域的生产及有
效日期、批号、班次、厂家名称和标识等图形和文字的标记。适用于绝大多数材料的在线
打标,如纸质包装、皮革布料、有机玻璃、树脂塑胶材料、竹木制品、有镀层的金属、
维光束偏转扫描系统。
LSSL-DNF-40F 聚焦镜片靠马达驱动,可以获得连续变化的成像范围和工作距离。所
有光学电气元件都包含安装在其中。对于光孔超过 40mm 的扫描系统,我们推荐使用
LSSL-DNF-60, -60I, -80 或者-80I 系列产品。
图例(单位: mm)
1 水冷进光孔
2 线性马达和调焦镜片
25°C ± 10°C
安装
水平安装,电气隔离,导热接触良好
性能参数表(所有角度都是光学角度)
LSSL-DNF-20I
LSSL-DNF-40I
LSSL-DNF-40F
入射光孔
最大 8 mm
最大 16 mm
最大 16 mm
出射光孔
最大 20 mm
最大 40 mm
最大 40 mm
马达参数
透镜最大行程
±2 mm
焦点光斑 (1/e2)
200μm (M2=1) to 550μm (M2=1) to <15μm (M2=1) <75μm(M2=1) 550μm(M2=1)
550μm (M2=1) 1.8mm (M2=1)
光束扩大倍率
2.8
3.8
2.35
2.4 to 2.1
2.1 to 1.9
透镜行程内平均焦点偏移 2 mm/mm 61 mm/mm 49.3mm/mm
头)
头)
头)
外形图 5(LSHL 系列打标 外形图 6(LSJC 系列打标 外形图 7(LSGT/3 系列打
头)
头)
标头)
激光打标头
双打标头(双头打标头,双头)
双打标头由两个扫描头组成,一路激光束进入打标头后通过光学组合分成两路激光束, 专用的双头打标软件分别控制双头工作,其打标效率是单头的二倍,同时打标面积也是单 头的二倍,特别适合要求快速和大面积打标的场所。
±3 mm
±1.5 mm
跟踪误差
0.55 ms
0.7 ms
1.4 ms
典型运动速度
≤280 mm/s
≤140 mm/s
≤100 mm/s
重复精度
< 0.5 μm
< 0.5 μm
< 1 μm
非线性
0.05 % FS
0.05 % FS
1.5 % FS
长期工作漂移 (环境条件不变,连续工作超 8
小时)
< 3 μm
10
10
10
小步长阶跃响应时间, ms
0.40
0.26
≤0.40
光学扫描角度
±20°
±24°
±20°
重复精度, urad
22
12
20
扫描速度, m/s
7
7
9
位置控制信号
XY2-100
XY2-100
(XY2-100)
电源要求
±15VDC, 2A
±15VDC, 5A
±15VDC, 3A
外形尺寸 (LxWxH), mm
三维激光焊接头(德国制造)
典型应用
机器人辅助焊接(远程焊接)
三维激光应用
飞行处理
型号 Model: OSSL-SWH-30FC/OSSL-SWH-30FC-V